Ad Hoc Networks 9 (2011) 835–851
Contents lists available at ScienceDirect
Ad Hoc Networks
journal homepage: www.elsevier .com/locate /adhoc
Integrated topology control and routing in wireless sensor networksfor prolonged network lifetime
Halit Üster ⇑, Hui LinDepartment of Industrial and Systems Engineering, Texas A&M University, College Station, TX 77843-3131, United States
a r t i c l e i n f o
Article history:Received 30 January 2010Received in revised form 30 July 2010Accepted 17 September 2010Available online 29 September 2010
Keywords:Data gatheringWireless sensor networksNetwork design modelsAlgorithms
1570-8705/$ - see front matter � 2010 Elsevier B.Vdoi:10.1016/j.adhoc.2010.09.010
⇑ Corresponding author. Tel.: +1 979 845 9573.E-mail address: [email protected] (H. Üster).
a b s t r a c t
This study considers an integrated topology control and routing problem in wireless sensornetworks (WSNs), which are employed to gather data via use of sensors with limitedenergy resources. We employ a hierarchical topology and routing structure with multiplesinks and devise a topology control scheme via usable energy fraction at the sensors.We develop and examine three different mathematical models whose solutions prescribeclusterhead and sink locations and data routing from sensors to sinks in a period of adeployment cycle. We develop a heuristic solution algorithm which provides very smalloptimality gaps for the models. The approach utilizes two types of solution representa-tions, a combination of multiple neighborhoods, and objective value-based cut inequalitiesfor improving the evaluation of candidate solutions. We present extensive numerical testresults and analysis of the models and the solution approach. We determine that our pro-posed model, which minimizes average energy usage and the range of remaining energydistribution at the sensors, captures important characteristics of topology control and rout-ing integration in WSN design and exhibits significantly better performance than ourbenchmark models and a well-known protocol HEED in extending network lifetime.
� 2010 Elsevier B.V. All rights reserved.
1. Introduction
Wireless sensors are used to sense a wide range ofnatural or artificial phenomena including temperature,pressure, humidity, light, motion, weight, noise, etc. Wire-less sensor networks (WSNs) can be employed for datagathering purposes in inhospitable environments and diffi-cult-to-reach terrains, such as forests, urban or rural battle-fields, and borderlines; in wild habitats and oceans tomonitor and observe natural phenomena; in disaster pre-vention and relief; in urban environments to monitor andcontrol traffic; and in industrial settings to track invento-ries and the state of other resources [37]. Recently, data-gathering WSNs find increasingly widespread applicationsin ecological and environmental monitoring [13,14,29].
. All rights reserved.
Two fundamental and related problems for effective andefficient design and operation of WSNs are topology control,which refers to the determination of an underlying networktopology and routing, which refers to the determinationdata transfer paths over this network. The relationship be-tween these problems is emphasized by WSN-specific attri-butes – energy efficiency and computation-communicationtrade-off. Energy efficiency is important because each sen-sor is equipped with an on-board nonrenewable powerunit. The communication-computation trade-off refers tothe fact that communication consumes more energy thanperforming computations on-board in a sensor [36].
In general, the lifetime of a sensor network can bedefined as the time frame between two successive sensordeployments, i.e., a deployment cycle. A deployment cycleconsists of successive periods of fixed time length for whichtopology and/or routing decisions are made. Thus, prolong-ing the network lifetime corresponds to obtaining themaximum number of successive periods that the data

836 H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851
generated at the sensors can reach the user. In our case, theend of a deployment cycle is reached when it is not possi-ble to obtain a feasible solution to the problem of transmit-ting data generated at the sensors to the user.
In this paper, we develop power-aware mathematicalmodels and solution approaches for the integrated topologycontrol and data routing problems to prolong the lifetime ofa WSN. To this end, we consider three models that differmainly in terms of their objective functions. The objectivesinclude minimization of (1) total or average energy usage inthe system, (2) maximum energy used at a sensor node, and(3) a weighted sum of the range of end-of-period remainingenergy distribution at the sensors and the average energyused in the system.
We adopt a hierarchical data flow structure in whichdata generated at the sensors are first routed to the sensorsdesignated as clusterheads (CHs). Each sensor is assignedto at least one CH which reduces the total data size thatit receives from sensors via aggregation. Each CH routesdata to a sink either through other CHs, which act onlyas relays without aggregation, or directly. Such a structureis beneficial in terms of energy efficiency in three ways:(1) Since the sensors in close proximity of each other arelikely to be in the same cluster and may generate very sim-ilar data, data aggregation at CHs helps to reduce redun-dancy and energy consumption in communication. (2)Hierarchical structure distributes the energy usage to mul-tiple sensors on multi-hop paths, thus eliminating thequick expiration of the sensors away from the sinks. (3)Since energy dissipation in communication is proportionalto the square of the distance, compared to direct commu-nication, the total energy dissipation due to communica-tion is less on a multi-hop route [31].
Our contributions in this paper can be summarized asfollows.
1. We devise three mathematical models for integratedtopology and routing decisions for data-gatheringWSNs. The objectives, minimization of total (or aver-age) energy usage in the network and minimization ofthe maximum energy usage at a sensor, are commonlyconsidered in devising communication protocols (e.g.,[15,16,25,27,28,38]). However, this has not been donefrom an integrated mathematical modelling perspectiveas in our case. We consider these two models as bench-mark models for our third proposed model, which min-imizes the total energy and the range of remainingenergy distribution in the network.
2. In devising our models, we consider the use of multiplesinks. This is helpful for energy efficiency since multiplesinks create an opportunity for better proximity to sen-sors, thus saving energy in communication. It is possi-ble to route the data so that the energy drainage inthe network is more evenly distributed to the sensorsby changing the locations of the sinks and the CHs ineach period. Xue et al. [39] also consider multiple sinks,however, with known locations as opposed to our casewhere the locations are also determined.
3. We suggest a new approach to achieve topology controlvia limiting the usable energy at a sensor as a fraction ofits total available energy. We show that how this usable
energy determined is important and difficult in our twobenchmark models. On the other hand, the solution inthe proposed third model is insensitive to this charac-teristic as the control of energy distribution is implicitlyaccounted in the objective.
4. We consider cases where an overall view of a measure,such as spatial and temporal temperature/humidiy/pressure gradients in a large sensor field deployedfor environmental monitoring, is of interest. To thisend, we employ a general data aggregation approachat the CHs that represents the elimination of dataredundancy mentioned above. We assume that theaggregation ratio increases with increasing sensordeployment density. In previous studies with dataaggregation (e.g., [15,16,19,42]), we observe thataggregation of data into a single signal at each CH,i.e., regardless of the amount of data received, is com-mon which is applicable in such cases as monitoringmaximum temperature in the sensor field.
5. Since the models dictate large discrete optimization for-mulations, obtaining exact solutions are highly imprac-tical using exact optimization methods such as abranch-and-cut algorithm. Thus, we develop a heuristicsolution algorithm which provides very small optimal-ity gaps for the models. The approach utilizes two typesof solution representations, a combination of multipleneighborhoods, and objective value-based cut inequali-ties for improving the evaluation of candidate solutions.Computational evidence demonstrates that our pro-posed third model performs significantly better thanboth benchmark models. Furthermore, we comparethe performance of the proposed model to a well-known protocol HEED [42] and show that our proposedmodel performs significantly better in terms of networklifetime.
The rest of this paper is organized as follows. After aliterature review in Section 2, we introduce the notation,problem definition and the optimization models in Sec-tion 3. In Section 4, we develop algorithmic approachesfor solving our mathematical models. In Section 5, weprovide computational results illustrating the perfor-mance of our algorithms, impact of usable energy fractionon network lifetime, and a comparison of the models insingle-and multi-period settings as well as a detailedanalysis based on energy characteristics and network life-times. Finally, in Section 6, we present a summary andconclusions.
2. Related literature
In the WSN literature, extensive effort has been in-vested in developing energy efficient protocols and routingparadigms to maintain a requested WSN topology. In thissection, we provide an overview of the topology controland routing studies, and point out most relevant studiesto our work.
Topology control is mainly achieved by the adjustmentof sensors’ transmission ranges, which is related to thepower level settings at the sensors [30,31]. Topology

H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851 837
control is not an activity that directly causes energy usageas in the case of routing data. An energy related objectivein topology control is essentially a proxy measureadopted for instilling energy efficiency at this stage toachieve real benefits in the routing stage. There are sev-eral studies, e.g., [12,22,25,27,35,38], that consider thetopology control from this perspective and aim to set upa strongly connected network by considering an energyusage related objective. Minimization of total energy usedand the maximum energy used by a sensor are two com-mon metrics. As opposed to a hierarchical structure and aconvergecast pattern, these studies take the perspectiveof a flat topology and a unicast or broadcast among thesensors. A topology control approach for a convergecastis given by Rodoplu and Meng [28]. The authors describea distributed algorithm which generates a minimum totalenergy, a tree rooted at the master-site to which all sen-sors can reach. Recently, there are also some researchersaddressing the coverage problem for the desired topology,while maintaining the connectivity. Zhang and Hou [43]present a distributed algorithm for maintaining sensingcoverage and connectivity by keeping a minimum num-ber of active sensors. Alfieri et al. [7] present a mixedinteger linear programming model to exploit data redun-dancy by defining subset of sensors active in differenttime periods. Column generation approach and a heuristicalgorithm are suggested for model solution. Soro andHeinzelman [34] consider the coverage preservation prob-lem in the context of cluster-based sensor networks.Several coverage-aware cost metrics are explored forselecting the set of CH and active sensors that provide fullnetwork coverage, as well as the set of routers thatforward data to the sink node.
The majority of the routing studies focus on develop-ing communications protocols while others adopt span-ning tree, shortest path or multi-commodity flow basedapproaches. Heinzelman et al. [15] develop a data aggre-gating cluster-based routing protocol Low Energy Adap-tive Clustering Hierarchy (LEACH) for a convergecast toa single sink at a fixed known location. Each CH actsboth as an aggregator and a relay to the sink. LEACHaims to maximize lifetime via a localized approach usingrandomized CH selections and a minimum energy basedassignment of sensors to CHs. LEACH is one of the firsthierarchical routing approaches in WSNs and later, muchwork (e.g., [8,16,21,24]) focuses on extending their workwith the same general setting. Although LEACH performsbetter than direct-from-sensor-to-sink routing, the mini-mum transmission energy (MTE) based routing [33], anda static clustering based routing approach (instead of CHrotations), certain issues about its underlying assump-tions remain. LEACH assumes that all nodes can reachthe sink with enough power, which is not always truefor WSNs, due to the limited energy at the sensors.LEACH adopts the randomized rotation of CHs to ensurea balanced energy consumption, but this may causesome nodes not to have a CH in their vicinity. To accountfor the shortcomings of LEACH, among others, the HybridEnergy-Efficient Distributed clustering (HEED) protocolby Younis and Fahmy [42] is well-known for its perfor-mance. In HEED, the primary goal is to identify CHs and
organize sensors into clusters so as to better utilize thelimited energy resources. The CHs are probabilisticallyselected based on their remaining energy and the sensorsjoin clusters so that the communication cost is minimized.In comparison to LEACH, HEED assumes a multi-hopconnection between CHs or to the sink node and, at eachperiod, it selects CHs with high remaining energy. HEEDprovides an effective method for prolonging the networklifetime. However, it does not necessarily ensure abalanced energy consumption because of the followingreasons: (1) In HEED, the sensors chosen as CHs closer tothe sink may have quick drainage due to their heavy loadin forwarding data packets. (2) At each period, HEEDattempts to chooses the highest energy sensors asCHs, which may be biased from the long-term networklifetime perspective.
As opposed to the localized algorithms, someresearchers address the routing scheme based on a theo-retical formation of the problem. Chang and Tass [11]consider the maximum lifetime routing problem withflat topologies. They present a linear programming modelwhere the objective is lifetime (single timeframe) maxi-mization (equivalently maximizing data flow). Xueet al. [39] extend the framework of a multi-commodityflow problem and suggest the use of multiple data sinksto increase the network lifetime. However, they do notconsider data aggregation to eliminate redundancy. Huaand Yum [17] aim to maximize the network lifetime byjointly optimizing data aggregation and routing. Themain drawback in these studies is that they assumethe static network topology, which may not be optimalfor balancing the energy consumption over the periods.Kalpakis et al. [19] study the maximum lifetime dataaggregation (MLDA) problem and formulate the lifetimeas a maximization linear program. The solution givesthe overall arc flows and it is later decomposed to deter-mine spanning (routing) trees, one for each period,rooted at the sink. Al-Karaki et al. [6] propose an energyefficient routing scheme Grid-based Routing and Aggre-gator Selection Scheme (GRASS). GRASS aims to maxi-mize the network lifetime by jointly addressing thecluster-based routing problem with application specificdata aggregation. Mathematical formulation and heuristicsolution approaches are suggested. Reviews on routingare given in [1,2,5] and excellent reviews of WSNs in-clude [3,4,20,41].
Recently, cross-layer design and optimization in WSNshave received significant attention. In the cross-layer ap-proach, different layers of the protocol stack can integrateand share information among each other to enhance net-work performance and maximize the lifetime. Burri et al.[10] propose a data-gathering protocol Dozer, that jointlyconsiders medium access control (MAC) layer, topologycontrol and routing to save energy. Dozer employs atree-based network structure to route the data, coordi-nates the nodes sleep schedules and achieves low radioduty cycles. Madan et al. [26] consider the link, MACand routing layers with optimization of transmissionschemes to maximize the lifetime. A simple networktopology is given to compute energy consumption andnetwork lifetime.

838 H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851
We note that these studies adopt a predeterminedtopology structure such as tree-based and linear topologyfor data routing. Research on the relation between topol-ogy control and routing is very limited. Specifically, if theissues of routing are not taken into consideration in thetopology control problem, then the underlying topologymight not be suited for supporting an efficient routingscheme. Considering this deficiency in the current litera-ture, we investigate the integrated mathematical modelsand their solution algorithms for topology control androuting, along with consideration of multiple sinks, basedon optimization techniques for the design of WSNs. In thiscontext, we devise new models and propose a new objec-tive, minimizing the average energy usage and the rangeof remaining energy distribution in the network. We showthat the new approach integrates topology and routingdecisions very effectively without a need for adjustingusable energy levels which we suggest for alternative mod-els for prolonging network lifetime. Furthermore, we em-ploy a generalized aggregation approach suitable fordata-gathering related applications such as in environmen-tal monitoring.
3. Mathematical models
Before we describe our models, we summarize theassumptions and define the notation.
We assume that once the sensors are randomly de-ployed in the sensor field, they approximate their positionsvia triangulation [32,9]. This information along with pre-configured sensor IDs are communicated to the user via aminimum cost forwarding protocol [40].
In a given period, a sensor collects data at an averagerate given by bits/unit time and forwards it to its CH. Weuse an average aggregation ratio at a CH, mainly to reflectthe elimination of data overlap, and note that this ratio ishighly dependent on the specific application and networkparameters such as deployment density. We also assumea fixed number of CHs being active in a period which canbe controlled by the user. In our computational studies,similar to previous studies [16,34,42], we consider varyingnumber of CHs, approximately 8–20% of the number ofsensors.
For energy dissipation, we employ a widely adoptedfirst order radio model (e.g. see [15]) in which energy dis-sipation is w (J/bit) to run the circuitry and v (J/bit/m2) forthe transmit amplifier. Then, transmitting xab (bits) of datafrom node a to node b dissipates ðwþ vD2
abÞxab and to re-ceive the same amount of data dissipates wxab, where Dab
is the distance (in meters) between a and b. In addition,to account for the power dissipation due to data aggrega-tion/processing efforts at a CH, we employ a dissipationrate of c (J/bit). We employ the values of the energy dissi-pation related parameters as in [15]; specifically, v = 100pJ/bit/m2, w = 50 nJ/bit, and we use a c value of 5 nJ/bit(note that pJ = pico-joules and nJ = nano-joules).
As mentioned above, we limit the usable energy that asensor or a CH can use. We represent the usable amountas a fraction p of the total available energy at a sensorand refer to it also as topology control parameter. This
provides the ability to manage topology control implicitly.This is an important characteristic because allowing a sen-sor’s whole energy to be usable can easily make the sensorvulnerable to quick energy depletion since it can be se-lected as a CH repeatedly.
In addition to data flows, our models also determine thelocations of the sinks and the CHs in each period. We as-sume that the sinks are not energy-constrained and areaccessible by a user. We consider a finite set of potentiallocations from which the models choose as operationalsinks. Since the sensor field is known a priori (withinwhich the sensors are deployed), we assume that a set ofcandidate sink locations are also known with respect tothe sensor field. For CHs, we consider the sensors as poten-tial CHs. Clearly, in every period the active sinks and theCHs can change, which is an essential property for energyefficiency because it promotes uniform power drainage atsensors by circumventing the same sensors from beingused as CHs.
Model parameters I
set of sensors, i 2 I J set of candidate CHs, j 2 J K set of candidate sinks, k 2 K Ri data generation rate (bits/unittime) at a sensor i
Dab distance (m) between any twonodes a and b
H number of CHs U number of sinks s an average data aggregationratio
Ei available energy (J) at a sensori
p usable fraction of Ei at a sensor T the length of a periodDecision variables
xcij
fraction of data flow per unittime from a sensor i to a CH jxccij
data flow per unit time from aCH i to a CH j
xujk
data flow per unit time from aCH j to a sink node kzcj
1 if a node j is set up as a CH, 0o.w.
zuk
1 if a node k is set up as a sink,0 o.w.ei
energy consumed by a sensornode iecm
energy consumed by a CH mECmax
maximum energy consumed ata sensor
ERmax
maximum remaining energy ata sensor
ERmin
minimum remaining energy ata sensor
Given common characteristics, such as underlying net-
work topology and flow structure and energy consumptioncalculations, we state the following set of common con-straints for our models.
H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851 839
Common constraintsXk2Kðwþ vD2
mkÞTxumk þ
Xj2Jnfmg
wþ vD2mj
� �Txcc
mj
þX
j2JnfmgwTxcc
jm þXi2Iðwþ csÞRiTxc
im ¼ ecm 8m 2 J ð1ÞX
j2Jðwþ vD2
ijÞRiTxcij ¼ ei 8i 2 I ð2Þ
Xk2K
xumk þ
Xj2Jnfmg
xccmj �
Xj2Jnfmg
xccjm þ ð1� sÞ
Xi2I
Rixcim
!¼ 0 8m 2 J ð3ÞX
j2Jxc
ij ¼ 1 8i 2 I ð4Þ
xcij 6 zc
j 8i 2 I ;8j 2 J ð5Þxcc
mj 6Xi2I
Rizcj 8m; j 2 J ð6Þ
xujk 6
Xi2I
Rizuk 8j 2 J ;8k 2 K ð7Þ
xcjk 6
Xi2I
Rizcj 8j 2 J ;8k 2 K ð8Þ
ei 6 pEi 8i 2 I ð9Þec
j 6 pEj 8j 2 J ð10ÞXj2J
zcj ¼ H ð11ÞX
k2Kzu
k ¼ U ð12Þ
zcj ; z
uk 2 f0;1g 8i 2 I ; j 2 J ð13Þ
xcij; x
ccij ; x
ujk; ei; ec
j P 0 8i 2 I ; j 2 J ; k 2 K ð14Þ
Constraints (1) and (2) determine energy consumed by aCH and a sensor, respectively. The energy dissipation dueto aggregation is embedded in the last term of theleft-hand side in (1) in such a way that more aggregation(a higher s value) results in higher energy dissipation.Constraints (3) state the flow balance at each CH and alsoensure that the data collected at a sensor is aggregatedwith data from other sensors only once after it is trans-ferred to a CH. Constraints (4) guarantee that the data gen-erated at each sensor reaches a CH. Constraints (5)–(8)assign the values of binary variables related to CH and sinkselections. Constraint (9) and (10) ensure that the total en-ergy consumed at a sensor cannot exceed its total availableenergy. Constraints (11) and (12) establish the requirednumber of CHs and sinks, respectively, and (13) and (14)are for variable integrality and non-negativity.Alternative models
M1 Minimize the total energy used:
MinXm2J
ecm þ
Xi2I
ei ð15Þ
subject to ð1Þ—ð14Þ
M2 Minimize the maximum energy consumed by a sensor node:
Min ECmax ð16Þ
subject to ð1Þ—ð14Þei 6 EC
max 8i 2 I ð17Þec
j 6 ECmax 8j 2 J ð18Þ
ECmax P 0 ð19Þ
Constraint (17) and (18) impose a variable upper bound onthe energy consumed at a sensor.
M3 Minimize the weighted (where t is the weight) sum of averageenergy consumption and range of remaining energy levels:
Min tXm2J
ecm þ
Xi2I
ei
!,jIj þ ER
max � ERmin
� �ð20Þ
subject to ð1Þ—ð12Þ ð13and14ÞER
min 6 Ej � ecj 8j 2 J ð21Þ
ERmin 6 Ei � ei 8i 2 I ð22Þ
zcj Ej � ec
j 6 ERmax 8j 2 J ð23Þ
ð1� zci ÞEi � ei 6 ER
max 8i 2 I ð24ÞER
max; ERmin P 0 ð25Þ
Constraint set pairs (21) and (22) and (23) and (24) expressthe minimum and the maximum remaining energy levelsfor each sensor node, respectively.
As discussed in the previous section, the objectives inM1 and M2 are commonly considered in devising protocolsrather than in a mathematical modelling context as in thisstudy. We observe that, when a lifetime measure is consid-ered, these objectives do not exactly capture the energydepletion pattern that we would like to see in the network.
More specifically, M1 minimizes overall energy dissipa-tion, which may lead to an energy drainage at certainnodes due to their successive usage in several periods ifthey happen to be on more favorable paths requiring lesstransmission energy. On the other hand, since M2 aimsto minimize the highest energy usage at a sensor node, itcan do so by creating long multi-hop routes from sensorsto the sinks so that each sensor dissipates only a smallamount of energy. In both cases, we face the issue of quickenergy drainage which occurs at certain nodes in the M1case and in the whole network in the M2 case. Limitingthe usable energy reserve at sensors can alleviate thisproblem by making only a fraction of the energy availableat the sensor nodes in each period.
We develop the third model in order to address thedrawbacks of M1 and M2 via the objective function forma-tion that promotes, from the perspective of lifetime maxi-mization, a more favorable energy depletion pattern in anetwork. Specifically, the objective in M3 directly ad-dresses the energy usage and also the variation in theremaining energy distribution at the sensor nodes by min-imizing its range. That is, M3 aims to uniformly distributeenergy usage across the network.
4. Solution approaches
Our models of interest dictate mixed integer program-ming problems and, for relatively large-scale instances,the use of branch-and-cut solution algorithms (as inCPLEX) is not helpful due to high memory and runtimerequirements. Therefore, we study the development of effi-cient heuristic solution approaches which take advantageof the availability of explicit model formulations andunderlying model and solution characteristics.

840 H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851
While developing the solution approaches and conduct-ing the computational studies using both the heuristicmethods and the exact branch-and-cut approach, we alsoincorporate objective function value-based cuts into themodels (in exact approach) or subproblems (in heuristicapproach) in order to significantly improve their solutiontimes. In particular, supposing that an upper bound bZ forthe model of interest is available, then for M1, M2, andM3, we utilize the cut inequalitiesXm2J
ecm þ
Xi2I
ei 6bZ ; ð26Þ
ECmax 6
bZ ; ð27Þ
and
tXm2J
ecm þ
Xi2I
ei
!,jI j þ ER
max � ERmin 6
bZ ; ð28Þ
respectively. Furthermore, for M3, using the following twological inequalities
ERmax � ER
min P 0 andXi2I
Ei �Xm2J
ecm þ
Xi2I
ei
! !,jIj 6 ER
max
in conjunction with Eq. (28), we obtain an additional cutinequality given by
tXi2I
Ei=jIj � ERmax
!6 bZ ð29Þ
Thus, we are able to benchmark the quality of our heuristicsolutions by employing a wider set of problem instances.We develop an efficient overall solution procedure that ad-dresses all three models, M1, M2 and M3, which differ onlyin the initial solution construction component. Before wepresent this complete procedure, we discuss its compo-nents in detail.
4.1. Solution representations and subproblems
Although the models considered here differ structurally,they embody the same sets of binary variables. Thus, weutilize the binary variables to obtain two solutionrepresentations.
In the first one, we represent a solution by a set of fixedCHs given by set C ¼ fj 2 J : zc
j ¼ 1g. To evaluate the good-ness (objective value) of such a solution, we solve a sub-problem, denoted by SubC, by simply fixing thecorresponding binary variables in C at 1 in the model ofinterest. Thus, we obtain the sink locations and data rout-ing along with the objective value ZðCÞ. In the second case,we represent a solution by the fixed sink locations, i.e.,D ¼ fk 2 K : zu
k ¼ 1g. To evaluate the goodness of a givensolution, we solve a subproblem, SubU, which is derivedfrom the model of interest by using D, and obtain theCHs and data routing along with the objective value ZðDÞ.
4.2. Construction heuristics
We devise two heuristics to find initial solutions, onefor M2 and the other for M1 and M3.
4.2.1. Construction heuristic for M2Recall that in M2, we aim to minimize the maximum
energy consumed by a sensor. Then, in a solution, thereis at least one sensor whose energy consumption (highestin all the sensors) uniquely determines the objectivevalue. Since the energy consumption is largely due to datatransmission, it makes sense to employ a set of CHs thatare spread all over the sensor field. This way, no individ-ual sensor or a small set of sensors are subjected to excep-tionally high energy consumption. To ensure this spreadof CHs over the sensor field, in the ConstructM2() heu-ristic, given in Algorithm 1, we proceed as follows. First,we note that ConstructM2() is a multi-start approach,i.e., its core algorithm (lines 3–15) is run Maxiter times;and the best of all the Maxiter solutions obtained is thefinal solution.
Each start first randomly picks a single node as a CHfrom the candidate set of CHs (lines 4–5). Then the restof the CHs (H � 1 of them) is picked based on distance insuch a way that a good spread of CHs in the sensor fieldis promoted. Distance dðj; CÞ between a node j and the setof already selected CHs (C) is measured as mini2Cdðj; iÞ.We pick the next CH as being the farthest away from thealready selected CHs (lines 7–9). Once a solution Sc is ob-tained after all of the CHs are picked this way, its goodnessis evaluated by solving the problem SubC described above.If Sc is better than the best solution so far (Sb), then it be-comes the new Sb (lines 11–14). In our computationalstudies, we use a Maxiter value of jJ j=2 if jJ j < 100 andjJ j=5 otherwise.
Algorithm 1. ConstructM2()
1:
initialize ZðSbÞ ¼ 1, Maxiter; 2: while Maxiter > 0 do 3: C ¼ ;, h = 1; 4: Randomly pick a node i from J ; 5: C ¼ CSfig, C ¼ J n fig;
6:
while h < H do 7: j� ¼ arg maxfdðj; CÞ : j 2 Cg; 8: C ¼ CSfj�g, C ¼ C n fj�g;
9:
h = h + 1; 10: end while 11: Sc ¼ C, solve SubC to obtain ZðScÞ; 12: if ZðScÞ < ZðSbÞ then 13: Sb ¼ Sc , ZðSbÞ ¼ ZðScÞ; 14: end if 15: Maxiter = Maxiter �1; 16: end while Sb and ZðSbÞ4.2.2. Construction Heuristic for M1 and M3Both M1 and M3 mainly aim to minimize energy
consumption with an additional requirement for M3,

H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851 841
whereby the range of the remaining energy distributionis also minimized. Since the data flow in the network istoward the sinks, it is preferable to ensure that someCHs are selected close to the periphery while the remain-ing CHs are chosen from the center of the sensor field sothat energy efficient natural paths can be establishedtowards sinks. The ConstructM1M3() heuristic, givenin Algorithm 2, aims to achieve this by dividing thewhole sensor field in two nested parts, a box centeredin the sensor field and the band around it. In particular,the candidate CHs in the first part, denoted by F 1, arethe ones that are in a square of size b centered in thesensor field. Then, the set of candidate CHs in the secondpart (close to periphery of the field), called F 2, is simplygiven by J n F1.
In this process, we also attempt to avoid coincidentallywell-positioned sensors (from an energy dissipation mini-mization point-of-view) being selected as CHs repeatedlyin successive periods and to protect low-energy sensorsfrom being selected as CHs. For this purpose, we consideronly a subset of sensors with higher-energy as the set ofcandidate CHs J . We denote this subset as IR since it isa subset of sensor set I . Specifically, to determine the IR
set, we use a threshold value THW calculated as W%of the average initial energy level at the sensors, i.e.,TH W ¼ ðW=100Þ � ð
Pi2IEi=jI j) and IR ¼ fi 2 I : Ei P TH Wg.
The ConstructM1M3() heuristic is also a multi-startapproach as ConstructM2() and we use the same maxi-mum number of iterations, Maxiter, as in ConstructM2().In each start, we proceed as follows (lines 5–23 in Algo-rithm 2). We first pick about a fraction a of total requiredCHs in F 2 (periphery band), specifically we pick a total ofba � Hc CHs from F 2. For this, we start by randomly pickinga CH and then choose the rest of the CHs one at a time atthe median distance from the currently selected ones (lines5–12). Then, the rest of the CHs (i.e., H � ba � Hc) arepicked from set F 1 similarly (lines 13–18). We determinethe goodness of the obtained solution Sc by solving theassociated SubC. We update the best solution Sb by Sc ifnecessary (lines 19–23).
In our implementations, before we choose the CHs, wecheck the number of candidates in F 1 and F 2 starting withan a value of 0.80 and a b (size of the center box) valuedetermined as bN/2c � 2 where N is the size of a squaresensor field. If there are not enough candidates in sets F 1
or F 2, we increase or decrease b by one unit. Note that,by changing the value of a, the ratio of CHs located aroundthe periphery to those in the inner part of the sensor fieldcan be changed. Also, we use a W value of 60 in our numer-ical studies.
Algorithm 2. ConstructM1M3()
1:
initializeF1 = F2 = ;, ZðSbÞ ¼ 1, Maxiter; 2: Form F 1 #J using the center square of size b; 3: F 2 ¼ J n F 1; 4: while Maxiter >0 do 5: C ¼ ;, h = 1; 6: Randomly pick a node i from F 2;S 7: C ¼ C fig, C ¼ F 2 n fig; 8: while h < bH � ac do9:
Pick j* which has the median dðj; CÞ;8j 2 C; 10: C ¼ CSfj�g, C ¼ C n fj�g;
11:
h = h + 1; 12: end while 13: C ¼ F 1; 14: while h < H do 15: Pick j* which has the median dðj; CÞ;8j 2 C;S 16: C ¼ C fj�g, C ¼ C n fj�g; 17: h = h + 1; 18: end while 19: Sc ¼ C, solve SubC to obtain ZðScÞ; 20: if ZðScÞ < ZðSbÞ then 21: Sb ¼ Sc , ZðSbÞ ¼ ZðScÞ; 22: end if 23: Maxiter=Maxiter �1; 24: end while 25: return Sb and ZðSbÞ4.3. Solution improvement procedures
In this section, we devise two search procedures thatwe later utilize in our complete procedure for improvingthe solutions obtained via construction heuristics. In thefirst method, we employ the CH set C as the solution repre-sentation and accordingly utilize subproblem SubC to eval-uate the goodness of the solution. In the second one, werepresent a solution by the set of selected sinks D and em-ploy the subproblem SubU for evaluating the goodness of asolution. This approach also includes finding a randomizedinitial solution, similar to finding CHs in ConstructM2()heuristic.
4.3.1. The Search SubC() Improvement ProcedureThis procedure starts with a feasible solution, de-
noted by Sbinit , which includes the CHs as determined
by a construction heuristic. Inspired by the variabledepth search approach presented by Lin and Kernigham[23], it searches the solution space by applying an ex-tended form of exchange neighborhood on C. In eachiteration of the algorithm, CH set is modified by makinga number of non-CHs serve as CHs while unassigningthe same number of CHs as non-CHs in the currentsolution.
In particular, we employ an h-exchange neighborhoodfunction where, in general terms, starting with a 1-ex-change (a single pair-exchange of a CH and a non-CHsensor), h is increased up to hmax as long as the solutiongoodness is monotonously improved. However, as we ex-plain later in Section 4.4, we assume that only a subset ofthe existing CHs can be exchanged (assigned as non-CH)in generating neighborhood solutions. For a current solu-tion Sc , we use a derived set, Sc
free, to represent this sub-set of exchangeable CHs. Furthermore, we note that thevariable depth search approach is a technique thatsearches a large solution space as it generates a largenumber of neighboring solutions of a current solutionin each iteration. We enhance its efficiency further by

842 H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851
utilizing both the proximity and the energy level infor-mation at the sensor nodes leading to a considerationof restricted and dynamic neighborhoods for CHs. In par-ticular, we use distance and energy information as fol-lows: for a CH to be exchanged, we consider only thenon-CH sensors in J which are within its q radius andhave at least a THW energy level. Then, the neighborhoodfor each node is clearly restricted to a subset of J . Also,it is very likely that the possible non-CHs that can be ex-changed with a CH vary in each period due to changingenergy levels. This neighborhood generation approachhelps to limit the neighborhood size with only a smallimpact on the network lifetime since the low-energysensors are prevented from being repeatedly employedas CHs.
The SearchSubC() heuristic proceeds as detailed inAlgorithm 3. The outside while loop, lines 2–28, controlsthe search procedure by conditioning on the maximumallowable exchange neighborhood size and the continuityof improvements over the best solution Sb. Since, as hincreases, the generation of a neighborhood and the eval-uation of the solutions require longer runtimes, we limitthe exchange neighborhood size by hmax. For a given hvalue, we generate the neighborhoods of j-exchange,j = 1, . . . ,h, in order (lines 3–18). For each j, we performat most Maxiter j-exchanges (lines 5–13). For each suchexchange i, we randomly pick j nodes from the Sc
free setof the current solution and generate a neighborhood solu-tion set Xi. The generation of Xi for j = 1 is straightfor-ward. For j P 2, we proceed by generating individualneighborhoods of j CHs (as in j = 1 case) and then, weconsider all feasible combinations for a j-exchange. Toevaluate the goodness of a solution generated, we employthe subproblem SubC and assign the most improvingsolution after Maxiter iterations as the current solutionSc. If an improvement gj over the best solution Sb (line14) is obtained, then we update the best solution (lines15–17). After this for loop is completed, considering allpossible j values (lines 3–18), in line 19, we calculatethe cumulative improvement gh for h-exchange neighbor-hood search, and if it improves the highest so far improve-ment quantity G*, G* is also updated (lines 20–22). Theoperations on lines 23–25 aim mainly at improving thesolution time in the neighborhood search. Specifically, ifthe highest objective improvement amount is greaterthan a maximum preset value Gmax and the neighborhoodradius q is greater than a preset minimum value, wedecrease q by one unit so that, in the next maximumneighborhood size h, the generation and evaluation ofneighboring solutions in each iteration i (lines 6–9) areless time consuming.
We note that, while evaluating a neighboring solutionvia solving SubC on line 8, we also employ the cut inequal-ities (26) for M1, (27) for M2, and (28) and (29) for M3. Inall cases, we replace bZ with ZðSbÞ and observe significantimprovement in solution times. In our numerical studies,given in Section 5, we set the values of hmax, initial q, qmin,and Gmax as 3, 5, 2 and 0:1 � ZðSb
initÞ. In addition, we use aMaxiter value of H if jJ j < 100, H/5 if jJ j > 200, and H/2otherwise.
Algorithm 3. SearchSubC()
1:
initialize h = 1, hmax, G* = 0, g0 =1,Sbinit (from a construction heuristic),
Maxiter, Gmax, q, qmin, J ;
2: while h 6 hmax and G* = gh�1 do 3: for j = 1 to h do 4: Sc ¼ Sbinit
5:
for i = 1 to Maxiter do 6: Randomly pick j nodes from Scfree
7: Generate a neighborhood solutions set Xi; 8: For each C 2 Xi, solve SubC to obtain ZðCÞ; 9: Si ¼ arg minfZðCÞ : C 2 Xig10:
if ZðSiÞ < ZðScÞ then 11: Sc ¼ Si; 12: end if 13: end for 14: gj ¼ ZðSbÞ � ZðScÞ; 15: if gj > 0 then 16: Sb ¼ Sc , ZðSbÞ ¼ ZðScÞ; 17: end if 18: end for 19: gh ¼Phj¼1gj;
20:
if gh > G* then 21: G* = gh; 22: end if 23: if G* > Gmax and q P qmin then 24: q = q � 1; 25: end if 26: h = h + 1; 27: end while Sb and ZðSbÞ4.3.2. The Search SubU() Improvement ProcedureIn this method, we use a solution representation based
on sink selection. Finding the optimum solution of SubU(subproblem for fixed sinks D) is generally a time-consum-ing process. Although the candidate set of sink nodes K istypically not very large when compared to the set of candi-date CHs J , a neighborhood search procedure based on ex-changes, similar to the one described above, is still verytime consuming. On the other hand, we observe that thesolution space over a set K can efficiently be searched byembedding a randomized construction component intoan algorithm and by employing the cut inequalities whilesolving a SubU whenever needed.
More specifically, the procedure SearchSubU(), givenin Algorithm 4, includes a fixed number of iterations, Max-iter, which we recommend to be set much less than the jKj,e.g. jKj=2 as in Section 5. The procedure involves mainlytwo components. In the first part (lines 3–9), we generatea solution by picking the first sink location randomly andthe others by ensuring a good separation between them.The approach in this first part is motivated by the observa-tion that sinks that are significantly separated from eachother will promote a divergent data flow to well-apartlocations; thus, utilizing a spread set of sinks leads to more

H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851 843
uniform energy depletion in the network. In the second part(lines 10–14), we assign the solution obtained from thefirst part as the current solution, and solve the associatedsubproblem SubU by also incorporating the cut inequalitycorresponding to the particular model being solved, specif-ically, (26) for M1, (27) for M2, and (28) and (29) for M3,with a bZ value equivalent to ZðSbÞ. While solving the sub-problem, again to alleviate the problem of excessive run-times, we employ a stopping criterion given by a EpGap
optimality gap or TiLim time limit, whichever is reachedfirst (EpGap and TiLim are CPLEX parameters). The bestsolution so far, Sb, is updated if improved by the currentsolution Sc , and a new iteration is started. Once the itera-tions are completed, we attempt to improve the final solu-tion again by solving the subproblem SubU with the bestcut inequality; however, this time we consider TiLim onlyas the stopping criterion, i.e., EpGap is the default CPLEXvalue of 10�6. Although this procedure is simple, it is veryeffective in terms of solution quality and serves the pur-pose of exploring the solution space efficiently with inex-pensive computational times. This is especially true whenit is embedded in the overall procedure that we describenext.
Algorithm 4. SearchSubU()
1:
initialize Sb (the best available solution), Maxiter, D ¼ ;, u = 1;2:
while Maxiter > 0 do 3: Randomly pick a node k from K;S 4: D ¼ D fkg, �D ¼ K n fkg; 5: while u < U do 6: k� ¼ arg maxfdðk;DÞ : k 2 �Dg; 7: D ¼ DSfk�g, �D ¼ �D n fk�g;
8:
u = u + 1; 9: end while10:
Sc ¼ D, solve SubU with EpGap, TiLim, andcut with bZ ¼ ZðSbÞ to obtain ZðScÞ;
11: if ZðScÞ < ZðSbÞ then 12: Sb ¼ Sc , ZðSbÞ ¼ ZðScÞ; 13: end if 14: Maxiter = Maxiter �1; 15: end while 16: Solve SubU with TiLim and cut with bZ ¼ ZðSbÞ;Sb and ZðSbÞ.
4.4. The complete procedure
Our complete procedure brings together the abovecomponents including construction and improvementheuristics. We apply the complete procedure to solve M1,M2, and M3 by varying only the construction heuristiccomponent, denoted by ConstructM � (), in Algorithm 5.
In particular, to obtain diversification in searching thesolution space, we initially generate Q solutions whereeach solution is represented by a set of CHs, C(lines 2–3). One of these Q solutions is found by using
the appropriate construction heuristic and the others aregenerated randomly. Note that both ConstructM2() andConstructM1M3() already employ the C set to representa solution. We then apply the neighborhood search proce-dure SearchSubC() to each of these solutions indepen-dently, assuming Sb
free ¼ Sb (line 4). That is, we perform an
intensified search in the exchange neighborhood of each ofQ solutions. Upon completion, we identify the common, ifany, CHs that appear in all of the Q solutions obtained; theseCHs are clearly favored in each solution, thus, we choose tokeep them in the final solution. We also identify the bestsolution among the Q solutions, assign it as the Sb (line 5),and form the set Sb
free as the CHs in Sb that are not commonin all of the Q solutions (line 6). As mentioned in Section4.3.1, subsetSb
free represents the exchangeable CHs in a solu-tion Sb. We treat the CHs that are common to all of the Qsolutions as a preferable (non-exchangeable) CHs, and, thus,we do not engage them in the improvement procedureSearchSubC(). We then apply the SearchSubC()with ini-tial solution Sb and record the objective value ZðSbÞ (line 7).In the last stage (line 8), we utilize the procedure Search
SubU() with Sb used in the initialization step.
Algorithm 5. Complete approach
1:
initialize Algorithmic parameters for ConstructM � (), SearchSubC(), andSearchSubU();2:
Generate an initial solution usingConstructM � ()3:
Generate Q � 1 CH based initial solutionsrandomly;4:
Improve each of Q solutions using SearchSubC(); 5: Assign the best of Q solutions as the Sb; 6: Determine the Sbfree associated with Sb;
7: Apply SearchSubC() to Sb and record ZðSbÞ; 8: Apply SearchSubU() using Sb as the inputsolution. Sb and ZðSbÞ
5. Computational study
The objective of our computational studies in this sec-tion is threefold. First, we examine the impact of usable en-ergy fraction p on network lifetime. Second, we consider asingle-period setting and evaluate the performance of ouralgorithms on the basis of solution quality and time via uti-lizing exact solutions for benchmarking. Third, utilizingour algorithms, we evaluate the effectiveness of the threemodels in prolonging the network lifetime in a multi-per-iod setting. To this end, we compare M3 with both ourbenchmark models M1 and M2 as well as with HEED [42].
Unless stated otherwise, all of the input and algorithmicparameter values are set as mentioned previously. Further-more, we generate jI j sensor coordinates randomly using auniform distribution in a square of size N meters(m). Thecandidate sites for sinks, K, are also generated randomlyon the periphery of the sensor field. We set the periodlength as T = 4000 time-units and the aggregation ratio as

10
20
30
40
50
60
70
80
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Initial p
Ave
rage
Num
ber
ofP
erio
ds
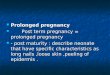
(M1) (M2) (M3)
Fig. 1. Average network lifetimes under varying initial p values.
844 H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851
s = 0.3. In addition, we set the weight for the average en-ergy dissipation component of the objectives M3 as t = 5which we empirically determined as a reasonably goodvalue.
The computational studies are performed on a machinewith Pentium D 3.2 GHz CPU and 2.0GB RAM and the algo-rithms are implemented in C++utilizing STL (StandardTemplate Library) and Concert Technology when CPLEXwas used.
5.1. The Impact of Usable Energy Fraction p on NetworkLifetime
To gain insight into the models M1, M2, and M3, andverify their effectiveness, we empirically examine the im-pact of topology control parameter p, which is the fractionof total energy available at a sensor made usable in a per-iod, on network lifetime. For this, we employ a data set of10 sample instances and optimally solve the models foreach instance with varying p values using exact branch-and-cut implementation in CPLEX 9.0. The test instancesare generated randomly with fixed N, jKj, jI j, U, H, and Ri
values of 50, 8, 15, 2, 3, and 10 bits/time-unit, respectively.We run each instance for a full deployment cycle (life-
time) 10 times, where each of the 10 runs corresponds toinitial p values (denoted by pI) ranging from 0.1 to 1.0.We start the first period of an instance with a pI value asthe current p value and, whenever the solution to the mod-el is infeasible for a period, we increase the current p valueby an increment (inc) value for which we assume a value of0.1. The most recent value of p in a period is carried as thecurrent p value for the next period. The end of the deploy-ment cycle is marked when p is 1.0 (whole available energyis available to use at the sensors) and the model’s solutionis infeasible. In general, a topology control scheme speci-fied as such can be represented as (pI, inc) and it shouldbe calibrated, i.e., the values of pI and inc should be deter-mined for a specific application via experimentation.
We summarize the results in Fig. 1 where the averagelifetimes over 10 instances for each pI value are plotted.We observe that the performance of M1 and M2 is highlysensitive to the initial value of p. If we do not restrict themaximum energy usage for each node, i.e. start the deploy-ment cycle with a large p value, the M1 and M2 performvery poorly. It seems that determining a good p value, pos-sibly via a conservative use of energy from the beginning ofa deployment cycle and a calibration of its increments, pro-vides a good lifetime measure. On the other hand, it isinteresting to observe that M3 is influenced very little, ifat all, by the choice of pI value, i.e., it is highly robust tothe changes in the amount of energy reserved for usageat the sensors. We can explain these differences in the per-formance of the models with respect to the p value as fol-lows. If the energy usage is not constrained in M1 and M2,then the same underlying network, given by the optimummodel solution, is repeatedly obtained. This leads to quickenergy depletion at certain sensors, thus shortening thenetwork lifetime. M3 is a multi-objective approach; itincorporates remaining energy measures into the optimi-zation and attempt to address energy dissipation both interms of minimizing its average in the network and its
variation among sensors. Thus, it promotes a favorabletransition in terms of energy status in the network fromperiod-to-period. The choice of usable energy fraction pis insignificant in M3 because its role is already effectivelyembedded in the model, leaving no question about howthe value of p should be calibrated from period-to-period.
5.2. Performance of heuristics
Table 1 summarizes the results for all three modelswhere we assume that the number of candidate sink loca-tions, jKj, is 8 and required sink locations, U, is 2 for set-tings with number of sensors, jI j, less than 100 and 3 forthe ones with jI j values greater than or equal to 100. Wealso assume that the size of the sensor field, N, is 50 forall the settings, except the ones with jI j equal to 150 forwhich N is 75. Furthermore, we set the data generation rateRi to 10 for settings with jI j less than 75, and to 9, 8, and 7for the ones with jI j values of 75, 100, and 150, respec-tively. For each problem setting, where we have 15 differ-ent instance sets for M1, 18 for M2, and 12 for M3 obtainedby varying the values of jI j and the number of requiredCHs H, we solve 30 randomly generated instances.
The values in columns 4–7 of Table 1 are averaged overthe instances. The fourth (TO
ave) and the fifth (TO�Cave ) columns
report the exact solution times (in seconds). In the former,we report the average runtimes (ns represents the in-stances not solved in 20 h), whereas in the latter, we reportthe same measure; however, this time we also employ cutinequalities in solving the models exactly as described inSection 4. Clearly, for an instance, the optimum objectivefunction values, ZO, for both of these cases are the same.However, the solution times are significantly improvedwhen cut inequalities are employed, as observed in columnfor TO�C
ave . The sixth column (THave) includes the average run-
times obtained using our complete approach given in Algo-rithm 5. We observe that they are quite significantly lowerthan the runtimes for exact solutions. In our tests, we con-sider only one additional random initial solution in Algo-rithm 5 which provides enough diversification and

Table 1Performance results for solving single period problems.
Model jI j H TOave TO�C
ave THave
Dave
M1 25 2 0.63 0.98 2.05 0.874 2.16 2.32 2.21 0.665 2.53 2.75 2.41 0.58
50 4 22.42 24.69 13.09 0.798 19.09 24.48 13.05 0.11
10 17.78 19.00 13.96 0.2175 6 112.52 127.15 82.81 0.13
12 83.90 82.63 67.67 0.3015 63.53 79.31 63.34 0.19
100 8 963.07 902.92 220.51 0.5016 567.52 649.54 132.20 0.1220 377.12 472.15 122.78 0.12
150 12 6646.53 5962.81 427.96 1.1624 3600.35 3227.57 245.97 0.2730 2620.82 3483.89 274.84 0.41
M2 15 2 5.10 2.80 1.98 1.093 25.22 2.30 2.08 1.394 58.98 2.54 1.99 1.33
20 2 19.23 3.28 4.35 1.043 123.47 5.87 4.63 1.134 424.37 6.68 4.57 1.10
25 2 87.14 15.75 9.09 0.704 1845.17 22.31 9.27 0.825 7698.09 33.88 9.14 0.89
30 2 220.04 20.72 16.66 0.534 8339.40 77.84 17.64 0.706 ns 179.87 16.57 0.79
40 4 ns 300.36 52.10 0.526 ns 944.07 49.71 0.578 ns 1241.67 49.07 0.67
50 4 ns 1186.85 126.37 0.618 ns 848.82 108.19 0.84
10 ns 4938.61 106.98 1.11
M3 15 2 2.79 2.68 3.06 0.003 7.53 7.15 11.77 0.144 17.09 16.12 29.30 0.16
20 2 8.36 6.72 8.81 0.213 38.26 29.27 23.69 1.094 125.15 145.50 72.65 0.26
25 2 23.50 23.38 13.22 0.124 755.86 82.20 70.22 0.105 3105.96 1081.02 99.12 1.26
30 2 56.02 50.87 52.16 1.404 2243.28 212.30 60.01 0.226 ns 8233.12 279.70 0.66
H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851 845
notable improvements in solution quality. In terms of solu-tion quality, we calculate the optimality gap asD = 100 � (ZH � ZO)/ZO, where ZH represents the heuristicobjective value and ZO is determined using cut inequalitieswhenever necessary. The average percentage optimalitygaps Dave, reported in the last column, illustrate that ourapproach is highly effective.
5.3. Network lifetime comparison of models
To examine the performance of the models in terms ofnetwork lifetime measure, we use our heuristic procedurein a multi-period setting under two topology controlschemes (pI, inc) as (1.0,0.0) and (0.1,0.1). In Table 2, wepresent our results for a number of instance sets, each gi-ven in a row, and 10 randomly generated instances foreach set. The first part of the table corresponds to the case
where no calibration for usable energy fraction is done; p isset to 1.0 so that the complete energy at each sensor isavailable for usage. Once again, M3 performs significantlybetter in terms of network lifetime than M1 and M2, whichperform particularly poorly.
Thus, we further consider the (pI, inc) = (0.1,0.1) schemeas reported in the second part of Table 2. In this case, life-time performance with both M1 and M2 improves dramat-ically, illustrating the effectiveness of employing a usableenergy fraction p. Observe that while M2 performs betterthan M1 under p = 1.0, this is reversed under the (0.1,0.1)scheme. On the other hand, it is clear that even M1 stillcannot perform as well as M3. Although we try only onescheme out of numerous possible ones, it is clear that agood strategy for adjusting the value of p, i.e., initial usableenergy fraction pI and its increments inc, in a deploymentcycle is needed for extending network lifetimes. However,

Table 2Comparison of different objective in the multi-period based on heuristic method.
(pI, inc) = (1.0,0.0) (pI, inc) = (0.1,0.1)
Problem setting H M1 M2 M3 M1 M2
Set1 2 9 13 61 60 49jI j ¼ 25, jKj = 8, 4 11 22 66 59 57U = 2, N = 50, Ri = 10 5 12 26 69 63 51
Set2 4 7 12 62 50 53jI j ¼ 50, jKj = 8, 8 9 20 67 58 55U = 2, N = 50, Ri = 10 10 11 25 69 51 54
Set3 6 5 13 71 59 51jI j ¼ 75, jKj = 8, 12 12 21 76 62 59U = 2, N = 50, Ri = 9 15 14 26 78 54 55
Set4 8 20 15 87 77 58jI j ¼ 100, jKj = 16, 16 15 25 93 81 63U = 3, N = 50, Ri = 8 20 13 31 93 67 65
Set5 12 10 14 78 63 44jI j ¼ 150, jKj = 16, 24 12 25 85 70 52U = 3, N = 75, Ri = 7 30 18 30 87 56 58
Set6 16 13 16 92 80 53jI j ¼ 200, jKj = 16, 32 10 28 100 78 58U = 3, N = 75, Ri = 6 40 22 34 102 78 65
Set7 20 7 16 92 62 43jI j ¼ 250, jKj = 16, 40 9 28 100 80 57U = 3, N = 100, Ri = 5 50 12 36 103 74 64
Set8 24 11 19 115 95 54jI j ¼ 300, jKj = 16, 48 24 36 126 91 68U = 3, N = 100, Ri = 4 60 20 44 130 87 61
846 H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851
there are two issues associated with such an approach.First, when changing problem size and environmentdepending on the application, calibrating for a good valuep for M1 and an inc for a (pI,inc) scheme during a deploy-ment cycle is very difficult and impractical. Second, evenif a topology control scheme, such as (pI, inc) = (0.1,0.1)),is employed, finding the feasible p in each period impliessolving the same problem multiple times with varying pvalues. On the other hand, we observe that none of thesedifficulties is associated with M3 since it is very robust tothe changes in p, and, thus, it truly integrates the topologycontrol and the routing problems effectively.
We next examine the remaining energy distributions ina relatively large problem setting both from the models’performance perspective and their impact on the redeploy-ment strategies. For this purpose, we consider the Set6. InFig. 2a–c, we plot the minimum, the average, and the max-imum remaining energy levels (ER
min, ERave, and ER
max, respec-tively) at the sensor nodes after each period for eachmodel. Furthermore, in Fig. 3a–c, we give the remainingenergy levels of the sensor nodes at the end of the deploy-ment cycle.
In Fig. 2a–c, we observe that the variations in remainingenergy levels for M1 and M2 are very large when comparedto M3. More specifically, for M1, the ER
min and ERmax values
are apart from each other, thus implying a large variationin remaining energy levels. This is also illustrated by theend-of-deployment-cycle energy levels, which are quitescattered for the sensors, as observed in Fig. 3a. Since M1concentrates on minimizing total energy usage, some sen-sors are more frequently chosen as CHs and deplete their
energy more. On the other hand, since M2 does not addressany network-wide energy usage measures, the objective ofminimizing the maximum energy usage implies one ormore critical sensors whose energy usage is determinantof the overall performance. The usage level determinedfor the critical sensor(s) also dictates the energy usageallowance (upper bound) for other sensors, and the relativecloseness of the end-of-period ER
ave and ERmin values in Fig. 2a
and b show that the sensors dissipate their energy at sim-ilar rates. This is also observed in Fig. 3b where most of thesensors’ remaining energy levels, although somewhat scat-tered, are more clustered close to zero. In both M1 and M2,the energy depletion rate at the sensors is also implicitlydetermined by the (pI, inc) = (0.1,0.1) scheme. The use ofmore stringent schemes generally causes infeasibilities,and, thus, the fraction p is incremented early in the deploy-ment cycle, and an exact calibration of p is very difficult.Coupled with the results given in Table 2, it is clear thatthe energy reserve scheme is the main reason we obtainrelatively better lifetime measures with M1 and M2. InFig. 2a and c, we clearly observe that M3 always has thehighest ER
min and the lowest ERmax. Furthermore, these values
are very close to each other, presenting a narrow range (asmall variation) in the remaining energy levels, which im-plies that most of the sensors deplete their energy more orless at the same rate during the progression of the deploy-ment cycle. This is also clearly reflected in Fig. 3c in whichthe remaining energy levels form a very narrow band.Since the minimization of total energy usage is also consid-ered in M3, the depletion rate is slow, providing a goodnetwork lifetime measure without relying on an explicit

Fig. 2. Remaining energy characteristics (progression).Fig. 3. Remaining energy distributions (end-of-deployment-cycle).
H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851 847
control of the usable energy reserve scheme. This is notunexpected, since we formulate the objective function ofM3 to incorporate this characteristic as well.
Finally, from a redeployment strategy perspective, M3is appealing since it contains primarily low-energy sensors

848 H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851
at the end of the deployment cycle. This can facilitate arandom deployment in the beginning of each cycle, so asto start with similar initial settings. On the other hand,M1 and M2 require special deployment and/or furtherattention to topology control in successive deploymentcycles due to a relatively high overall variation in theend-of-deployment-cycle energy levels.
5.4. Network lifetime comparison of M3 and HEED
To further evaluate the performance of our proposedmodel, we compare model M3 with Hybrid Energy-Effi-cient Distributed clustering (HEED) [42] which is a well-known method for its performance in terms of networklifetime. As mentioned in Section 2, HEED’s main goal isto identify CHs and assign sensors to clusters for better en-ergy efficiency. The CHs are probabilistically selected basedon their remaining energy and the sensors join clusters soas to minimize the communication cost. HEED does notspecify a particular scheme for routing CHs to the sink afterthe clusters and CHs are determined; however, the authorsspecifically mention routing to achieve minimum powerusage across the network as a possible approach amongothers. For detailed description on HEED protocol, we referthe reader to Younis and Fahmy [42].
We choose HEED for comparison because it has the fol-lowing features similar to the setting we consider: (1) It isa cluster-based routing protocol for data gathering pur-pose; HEED assumes a multi-hop connection betweenCHs and to the sink and, at each period, it selects CHs withhigh remaining energy. (2) Data collection is performedperiodically which is suitable for continuous monitoring.(3) Data aggregation is performed at each clusterhead forenergy efficiency.
On the other hand, there are also some differences inthe model assumptions of HEED and M3 : (1) In HEED, onlyone sink node is considered and each sensor can onlychoose one CH to transmit its data; (2) The cluster radiusis explicitly specified, i.e., each sensor can only transmitits data to a CH within the specified range. (3) The data isaggregated into a single representation signal at each CH,i.e., regardless of the amount of data received, a CH trans-mits a fixed amount of data out towards the sink, thus thesink eventually receives this fixed amount of data from thenetwork (e.g., maximum temperature in the sensor field).(4) HEED adopts the radio model where both the free space(typical D2 power loss) and the multipath fading (D4 powerloss) models are used. To transmit xij (bits) of data fromnode i to node j dissipates f(Dij)xij, where f(Dij) is defined as
f ðDijÞ ¼wþ v1D2
ij if Dij < d0
wþ v2D4ij if Dij P d0
(ð30Þ
with parameters set as d0 = 75m, v1 = 10 pJ/bit/m2,v2 = 0.0013 pJ/bit/m4, and w = 50 nJ/bit.
In the M3 model, we consider multiple sinks and a gen-eral aggregation scheme in which, instead of a single rep-resentative data for the sensor field, a more general viewof a measure is of interest, e.g., temperature/humidiy/pres-sure gradients in a large sensor field employed for environ-mental monitoring. More importantly, M3 also integrates
selection of CHs and sinks with routing decisions. There-fore, for comparison purposes, we modify model M3 tohandle the several characteristics of the setting in HEEDby introducing cluster radius, single sink, and the new dis-tance representation as follows.
First, we introduce two new parameters into M3: r asthe cluster radius and k as the total amount of data per per-iod generated at each sensor. Furthermore, we redefine thevariable xc
ij as a binary variable with a value of 1 if a sensor iis assigned to a CH j, and 0 otherwise. We also note thatsince there is a single sink we use the variable xu
m0, whereindex 0 represents the sink, for flow from CH j to the sink.Then, the modified formulation, called eM3, is(i 2 I ; j;m 2 J unless stated otherwise)
Min tð1=jIjÞXm2J
ecm þ
Xi2I
ei
!þ ER
max � ERmin
� �ð31Þ
s.t.
f ðDm0Þkxum0 þ
Xj2Jnfmg
f ðDmjÞkxccmj þ
Xj2Jnfmg
wkxccjm
þ ðwþ csÞkXi2I
xcim ¼ ec
m 8m ð32ÞXj2J
f ðDijÞkxcij ¼ ei 8i ð33Þ
xum0 þ
Xj2J nfmg
xccmj �
Xj2Jnfmg
xccjm þ ð1� sÞ
Xi2I
kxcim
!¼ 0 8m
ð34ÞXj2J
xcij ¼ 1 8i ð35Þ
xcij 6 br=Dijczc
j 8i;8j ð36Þxcc
mj 6 kjI jzcj 8m; j ð37Þ
xcj0 6 kjI jzc
j 8j ð38Þei 6 pEi 8i ð39Þec
j 6 pEj 8j ð40ÞXj2J
zcj ¼ H ð41Þ
zcj Ej � ec
j 6 ERmax 8j ð42Þ
ð1� zci ÞEi � ei 6 ER
max 8i ð43ÞER
min 6 Ei � ei 8i ð44ÞER
min 6 Ej � ecj 8j ð45Þ
xcij; z
cj ;2 f0;1g 8i; j ð46Þ
xccij ; xu
j0; ei; ecj ; ER
max; ERmin P 0 8i; j ð47Þ
(32) and (33) assign the values of the total energy con-sumed by a CH and a sensor node, respectively. Constraints(34) state the data flow balance at each CH node and con-straint (35) guarantees that each sensor is assigned to oneCH. Constraints (36)–(38) assign the values of binary vari-ables related to CH location selections. Note that con-straints (36) also ensure that only the sensors within thecluster radius r can transmit the data to the associatedCH. Constraint sets (39) and (40) ensure that the total en-ergy consumed at a node cannot exceed the total availableenergy at the corresponding sensors. Constraints (41)

Table 3Network lifetime via HEED and M3 approaches.
Number of nodes, jI j
Approach 150 200 250 300
HEED 42 50 55 50eM3 264 283 294 302
H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851 849
establish the required number of CHs. Constraint sets42–45 give the maximum and minimum remaining energyat a sensor node. Finally, (46) and (47) include the integral-ity and non-negativity of the decision variables.
Our solution approach in Section 4 is directly applicableto solve the modified model as well. However, since onlyone sink is employed in eM3, steps 7 and 8 in the Algo-rithm 5 are excluded.
As mentioned above, the main component of the HEEDis the selection of CHs and the assignment of sensors toCHs i.e., forming the clusters); no specific routing protocolto compute inter-cluster paths between CHs or to the sinkis given in HEED. Thus, as suggested in the context ofHEED, we minimize energy usage by employing a subprob-lem of our M1 model (which minimizes average energyusage in the network) while determining data routing fromsensors to the sink via CHs. In doing so, we readily incorpo-rate the same general aggregation in M3 in the routingscheme since M1 employs the same aggregation approach.In each period, we obtain the formation of clusters, i.e., thevalues of xc
ij and zcj using HEED algorithm, then we solve the
model M1 by fixing the binary variables xcij and zc
j to thesevalues to obtain data routing given by variables xcc
ij and xuj0.
For our studies, similar to the setting in HEED, we as-sume the nodes are randomly distributed in square of size100m sensor field (with its lower left one corner at the ori-gin) and the sink node is located at coordinates (50, 175).The cluster radius r is set 25m and the amount of sensordata generated per period, k, is taken as 2000 bits. Theaggregation ratio, s, values of 0.15, 0.20, 0.25, and 0.30;and the number of CHs, H, of 9, 10, 13, and 15 are usedfor sensor fields with the number of sensors, I , of 150,200, 250, and 300, respectively. In doing so, we ensure thatthe number of CHs is about 5% of the number of sensors,similar to HEED, and the aggregation ratio increases (i.e.,amount of data eliminated increases) as the sensor densityin the field increases. Finally, as before, the initial energy atthe sensors are randomly drawn from U[0.1,0.5].
We summarize the average lifetime results over our in-stances in Table 3. It can easily be observed that the inte-grated approach, which we devise via integratingtopology and routing decisions, significantly performs bet-ter than HEED; the network lifetime is about sixfold longeron average with the integrated approach eM3.
6. Summary and conclusions
In this paper, we introduce three alternative mathemat-ical models for integrated topology and routing decisionsfor data-gathering WSNs so as to prolong their lifetimesubject to limited energy at the sensors. In doing so, wealso consider a hierarchical network structure with
multi-hop routing, multiple sinks, and a general dataaggregation approach and devise the models to determineclusterhead and active sink locations as well as data flowroutes from sensors to sinks in each period. We also de-scribe a topology control scheme on how the usable energyfraction (of the available energy) at a sensor changes fromperiod-to-period in a deployment cycle.
The first two approaches, M1 and M2, which have theobjectives of average energy usage minimization and min-imization of the maximum energy usage at a sensor, areconsidered previously in the literature while prescribingcommunication protocols as opposed to an integratedmathematical modelling perspective as in this study. Thus,these models can be considered as benchmark models forthe performance of the proposed third model, M3, whichhas an objective of the minimizing the total energy andthe range of remaining energy distribution at the sensors.
Since the models dictate large discrete optimization for-mulations, employing exact optimization approaches ishighly impractical, thus, we develop a general heuristicalgorithm, applicable for each model, that performs verywell in our computational tests. Our procedure utilizes effi-cient construction heuristics, two types of solution repre-sentations, a combination of multiple neighborhoods, andan objective value based on cut inequalities for better effi-ciency in evaluating candidate solutions. Heuristic solu-tions are also employed via cut inequalities to improvethe time performance and alleviate the memory difficultiesassociated with an exact branch-and-cut implementation.
Using our heuristic approach, we conduct numericaltests and analyses of the models in a multi-period setting.We observe that M2 and especially M1 perform verypoorly when usable energy fraction p is set to 1.0 duringa deployment cycle. When the usable energy scheme ischanged to a conservative one given by (pI, inc) = (0.1,0.1),i.e. initial p is 0.1 and increased by 0.1 whenever energylevels are insufficient in a period, both M1 (which now per-forms better than M2) and M2 exhibit better network life-time performance; however, they still perform inferior toM3 and appear to be highly sensitive to the topology con-trol scheme.
Our proposed model M3 is highly insensitive to the set-ting of usable energy fraction p and performs very well interms of network lifetime. It incorporates both energyusage and variation in the end-of-period remaining energylevels in its objective, and, thus, truly integrates topologycontrol and routing decisions without the need to exoge-nously set and calibrate a p value. In our numerical tests,we also observe that, even when the first period energylevels in a deployment cycle are varied, M3 performs verywell with a full available energy (i.e. p = 1.0). This propertyalso contributes to efficiencies in terms of redeploymentsince the reconfiguration via topology and routing deci-sions in each period leads to a self-adjustment in the net-work. As a result, the energy levels at the end of adeployment cycle are confined in a narrow band which im-plies that uniform deployment strategies can be effectivelyemployed.
Finally, we also compare the performance of the pro-posed M3 model to a well-known protocol HEED devisedspecifically to determine CH locations and sensor-to-CH

850 H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851
assignments in a WSN. For data routing in HEED, we em-ploy a mathematical optimization model based on ourmodels; and we also slightly modify M3 to obtain a specialcase, which is still solvable by our algorithm, so that thetwo approaches can be compared. In our computationalstudies, we show that our proposed model performs signif-icantly better in this comparison as well.
In summary, our modelling approaches, solution algo-rithms, and extensive analyses illustrate that M3 hasattractive properties capturing important characteristicsof integrated topology and routing decisions to improveenergy efficiency and prolong lifetime of data-gatheringWSNs.
Acknowledgments
The authors thank the anonymous referees and associ-ate editor for their helpful comments and suggestionson an earlier version of this paper. This research wassupported by the National Science Foundation GrantCMMI-0428831.
References
[1] A. Abbasi, M. Younis, A survey on clustering algorithms for wirelesssensor networks, Computer Communications 30 (14–15) (2007)2826–2841.
[2] K. Akkaya, M. Younis, A survey on routing protocols for wirelesssensor networks, Journal of Ad Hoc Networks 3 (3) (2005) 325–349.
[3] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci, Wirelesssensor networks: A survey, Computer Networks (2002) 393–422.March.
[4] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci, A survey onsensor networks, IEEE Communications Magazine 40 (8) (2002) 102–114.
[5] J.N. Al-Karaki, A.E. Kamal, Routing techniques in wireless sensornetworks: a survey, IEEE Wireless Communications 11 (6) (2004) 6–28.
[6] J.N. Al-Karaki, R. Ul-Mustafa, A.E. Kamal, Data aggregation androuting in wireless sensor networks: optimal and heuristicalgorithms, Computer Networks 53 (7) (2009) 945–960.
[7] A. Alfieri, A. Bianco, P. Brandimarte, C.F. Chiasserini, Maximizingsystem lifetime in wireless sensor networks, European Journal ofOperational Research 181 (2007) 390–402.
[8] S. Bandyopadhyay, E.J. Coyle, An energy efficient hierarchicalclustering algorithm for wireless sensor networks, in: Proceedingsof the 22nd Annual Joint Conference of the IEEE Computer andCommunications Societies (INFOCOM), 2003, pp. 1713–1723.
[9] N. Bulusu, J. Heidemann, D. Estrin, GPS-less Low Cost OutdoorLocalization for Very Small Devices. Technical Report 00–729,Department of Computer Science, University of SouthernCalifornia, 2000.
[10] N. Burri, P. von Rickenbach, R. Wattenhofer, Dozer: ultra-low powerdata gathering in sensor networks, in: ACM/IEEE FourthInternational Symposium on Information Processing in SensorNetworks (IPSN’07), 2007, pp. 450–459.
[11] J. Chang, L. Tassiulas, Maximum lifetime routing in wireless sensornetworks, IEEE/ACM Transactions on Networking 12 (4) (2004) 609–619.
[12] W. Chen, N. Huang, The strongly connecting problem on multihoppacket radio networks, IEEE Transaction on Communications 37 (3)(1989) 293–295.
[13] S.L. Collins, L.M.A. Bettencourt, A. Hagberg, R.F. Brown, D.I. Moore, G.Bonito, K.A. Delin, S.P. Jackson, D.W. Johnson, S.C. Burleigh, R.R.Woodrow, J.M. McAuley, New opportunities in ecological sensingusing wireless sensor networks, Frontiers in Ecology and theEnvironment 4 (8) (2006) 402–407.
[14] J.K. Hart, K. Martinez, Environmental sensor networks: a revolutionin the earth system science?, Earth-Science Reviews 78 (3–4) (2006)177–191
[15] W.B. Heinzelman, A. Chandrakasan, H. Balakrishnan, Energy efficientcommunication protocol for wireless micro-sensor networks, in:
Proceedings of IEEE Hawaii International Conference on SystemSciences, 2000, pp. 174–185.
[16] W.B. Heinzelman, A. Chandrakasan, H. Balakrishnan, An application-specific protocol architecture for wireless microsensor networks,IEEE Transactions on Wireless Communications 1 (4) (2002) 660–670.
[17] C. Hua, T.P. Yum, Optimal routing and data aggregation formaximizing lifetime of wireless sensor networks, IEEE/ACMTransactions on Networking 16 (2008) 892–903.
[18] M. Ilyas, I. Mahgoub (Eds.), Handbook of Sensor Networks: CompactWireless and Wired Sensing Systems, CRC Press, Boca Raton, FL,2004.
[19] K. Kalpakis, K. Dasgupta, P. Namjoshi, Efficient algorithms formaximum lifetime data gathering and aggregation in wirelesssensor networks, Computer Networks 42 (6) (2003) 697–716.
[20] H. Karl, A. Willig, Protocols and Architectures for Wireless SensorNetworks, John Wiley and Sons, West Sussex, England, 2005.
[21] M. Khan, B. Bhargava, L. Lilien, Self-configuring Clusters, DataAggregation, and Authentication in Microsensor Networks.Technical Report CSD TR 03-003, Department of Computer Science,Purdue University, 2003.
[22] M. Kubisch, H. Karl, A. Wolisz, L.C. Zhong, J. Rabaey, Distributedalgorithms for transmission power control in wireless sensornetworks, in: Proceedings of the IEEE Wireless Communicationsand Networking Conference (WCNC), 2003, pp. 558–563.
[23] S. Lin, B.W. Kernighan, An effective heuristic algorithm for thetraveling salesman problem, Operations Research 21 (1973) 498–516.
[24] S. Lindsey, C.S. Raghavendra, K.M. Sivalingam, Data gatheringalgorithms in sensor networks using energy metrics, IEEETransactions on Parallel and Distributed Systems 13 (9) (2002)924–935.
[25] E.L. Lloyd, R. Liu, M.V. Marathe, R. Ramanathan, S.S. Ravi, Algorithmicaspects of topology control problems for ad hoc networks, MobileNetworks and Applications 10 (1–2) (2005) 19–34.
[26] R. Madan, S. Cui, S. Lall, A.J. Goldsmith, Modeling and optimization oftransmission schemes in energy-constrained wireless sensornetworks, IEEE/ACM Transactions on Networking 15 (6) (2007)1359–1372.
[27] R. Ramanathan, R. Hain, Topology control of multihop wirelessnetworks using transmit power adjustment, in: Proceedings of theIEEE Conference on Computer Communications (INFOCOM), 2000,pp. 404–413.
[28] V. Rodoplu, T.H. Meng, Minimum energy mobile wireless networks,IEEE Journal on Selected Areas in Communications 17 (8) (1999)1333–1344.
[29] P.W. Rundel, E.A. Graham, M.F. Allen, J.C. Fisher, T.C. Harmon,Environmental sensor networks in ecological research, NewPhytologist 182 (3) (2009) 589–607.
[30] P. Santi, Topology control in wireless ad hoc and sensor networks,ACM Computing Surveys 37 (2) (2005) 164–194.
[31] P. Santi, Topology Control in Wireless Ad Hoc and Sensor Networks,John Wiley and Sons, West Sussex, England, 2005.
[32] A. Savvides, C.-C. Han, M.B. Strivastava, Dynamic fine-grainedlocalization in ad-hoc networks of sensors, in: Proceedings of the7th Annual International Conference on Mobile Computing andNetworking, 2001, pp. 166–179.
[33] S. Singh, M. Woo, C.S. Raghavendra, Power-aware routing in mobilead hoc networks, in: Proceedings of the 4th Annual ACM/IEEEInternational Conference on Mobile Computing and Networking,1998, pp. 181–190.
[34] S. Soro, W.B. Heinzelman, Cluster head election techniques forcoverage preservation in wireless sensor networks, Ad HocNetworks 7 (5) (2009) 955–972.
[35] Y. Tseng, Y. Chang, B. Tzeng, Energy-efficient topology control forwireless ad hoc sensor networks, Journal of Information ScienceEngineering 20 (1) (2004) 27–38.
[36] Q. Wang, H. Hassanein, A comparative study of energy-efficient (E2)protocols for wireless sensor networks (In Ilyas and Mahgoub [18],chapter 18).
[37] Q. Wang, H. Hassanein, K. Xu, A practical perspective on wirelesssensor networks (In Ilyas and Mahgoub [18], chapter 9).
[38] R. Wattenhofer, L. Li, P. Bahl, Y.M. Wang, Distributed topologycontrol for power efficient operation in multihop wireless ad hocnetworks, in: 20th Annual Joint Conference of the IEEE Computerand Communications Societies (INFOCOM), 2001, pp. 1388–1397.
[39] Y. Xue, Y. Cui, K. Nahrstedt, Maximizing lifetime for data aggregationin wireless sensor networks, Mobile Networks and Applications 10(2005) 853–864.

H. Üster, H. Lin / Ad Hoc Networks 9 (2011) 835–851 851
[40] F. Ye, A. Chen, S. Liu, L. Zhang, A scalable solution to minimum costforwarding in large sensor networks, in: Proceedings of 10thInternational Conference on Computer Communications andNetworks, 2001, pp. 304–309.
[41] J. Yick, B. Mukherjee, D. Ghosal, Wireless sensor network survey,Computer Networks 52 (12) (2008) 2292–2330.
[42] O. Younis, S. Fahmy, HEED: a hybrid, energy-efficient distributedclustering approach for ad-hoc sensor networks, IEEE Transactionson Mobile Computing 3 (4) (2004) 366–379.
[43] H. Zhang, J.C. Hou, Maintaining sensing coverage and connectivity inlarge sensor networks, Ad Hoc & Sensor Wireless Networks 1 (1–2)(2005) 89–124.
Halit Üster is an Associate Professor in theDepartment of Industrial and Systems Engi-neering at Texas A&M University. He holds aPh.D. in Management Science/Systems fromMcMaster University, Ontario, Canada. Hisresearch interests are in the design of net-worked systems in logistics and communica-tions, and applied optimization. Hispublications appeared in Computers andOperations Research, European Journal ofOperational Research, Interfaces, IIE Transac-tions, Naval Research Logistics, and Trans-
portation Science among others. He is an Associate Editor for IIETransactions and a member of IIE and INFORMS.
Hui Lin is a Ph.D. candidate in the Departmentof Industrial and Systems Engineering atTexas A&M University. She holds two B.S.degrees in Automation and Engineering Eco-nomics, and an M.S. degree in ElectricalEngineering from Tianjin University, China.Her research interests include wireless sensornetwork design, applied optimization andhigh performance computing. She is a studentmember of INFORMS.
Recommended