NAO page 1/15 PTSI Voiron
TP S.I.I. CYCLE 4 : SYSTEMES LINEAIRES CONTINUS
INVARIANTS
Ferdinand Buisson Voiron
SLCI PTSI
Cycle 4 :
Comportement temporel des systèmes asservis
Compétences :
A3, B2
Ilot: 05 - Cheville Robot NAO
Activités Contenu Compétences
1 Réponse temporelle – Modèle de connaissance A3-B2-C
2 Etude du modèle de comportement A3-B2-C
3 Etude du modèle simulé A3-B2-C
4 Comparer les écarts C
NAO page 2/15 PTSI Voiron
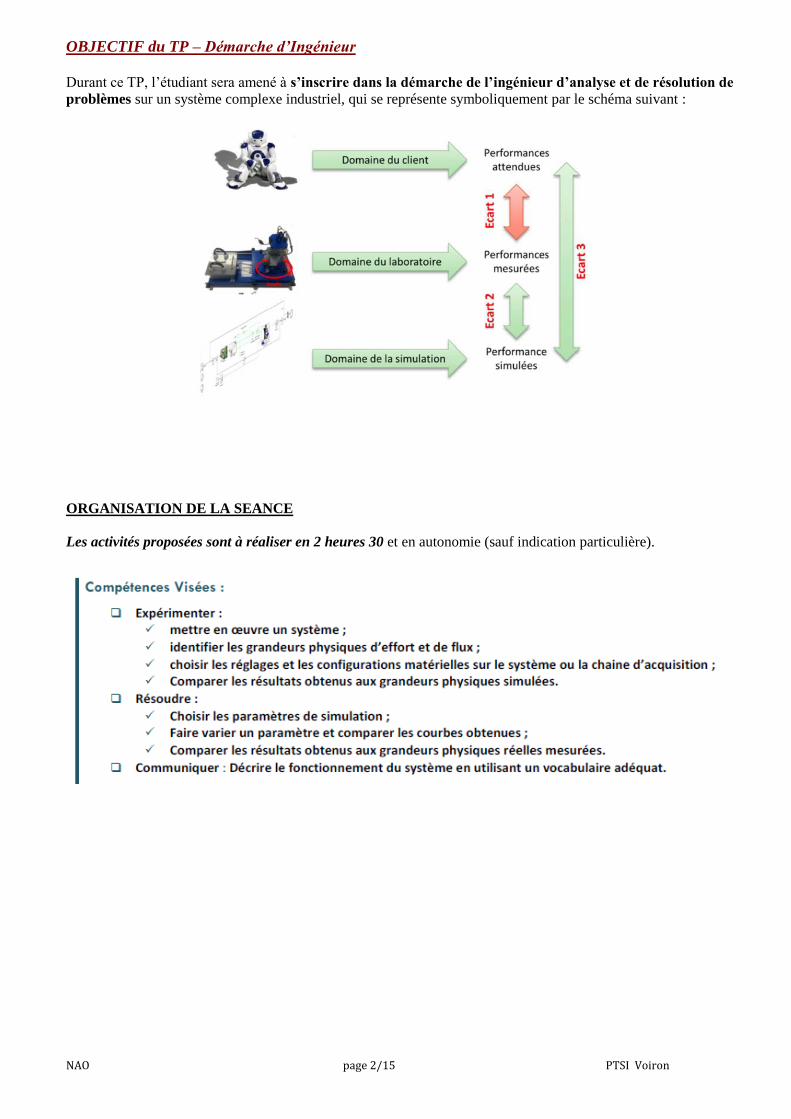
OBJECTIF du TP – Démarche d’Ingénieur
Durant ce TP, l’étudiant sera amené à s’inscrire dans la démarche de l’ingénieur d’analyse et de résolution de
problèmes sur un système complexe industriel, qui se représente symboliquement par le schéma suivant :
ORGANISATION DE LA SEANCE
Les activités proposées sont à réaliser en 2 heures 30 et en autonomie (sauf indication particulière).

NAO page 3/15 PTSI Voiron
Objectifs de TP :
Il est proposé dans ce TP :
- de tracer et analyser les performances de la réponse du système à partir de son modèle de connaissance,
- de tracer et analyser les performances la réponse réelle du système (modèle de comportement),
- de réaliser et analyser les performances d’une simulation sous Scilab
- enfin de superposer ces trois courbes, et d’analyser et préciser l’origine des écarts entre le comportement
mesuré et le comportement provenant des modèles, afin de valider ces deux modèles.
Mise en situation. Pour assurer au robot NAO des performances élevées, le constructeur a choisi de mettre en place une double articulation au
niveau de sa cheville, et d’asservir la position de ces axes de tangage et de roulis.
NAO page 4/15 PTSI Voiron
05 - NAO Activité Contenu Compétences
1 Etude théorique sur modèle de
connaissance A3-B2-C
Acteur : pilote de groupe
1. Étude du modèle de connaissance de l’axe de roulis
Présentation du système
Le support de TP, la cheville NAO, disposé sur la table est un sous
système du robot NAO.
Les deux chaînes fonctionnelles de la cheville (axe de tangage et
de roulis) ont la même structure.
Commande de l’axe de roulis de la cheville
Le support de TP (cheville) permet de régler les paramètres de commande des axes de la cheville NAO via un
logiciel de pilotage.
La partie commande est gérée par l’ordinateur et par la carte de pilotage associée.
La partie opérative est représentée par la « cheville » montée sur son support bleu sur laquelle nous pouvons
monter un système de masse.
Si ce n’est déjà fait, allumer le PC et vérifier que le câble USB de la maquette y est bien connecté.
Lancer le logiciel NAO (utiliser le raccourci sur le bureau).
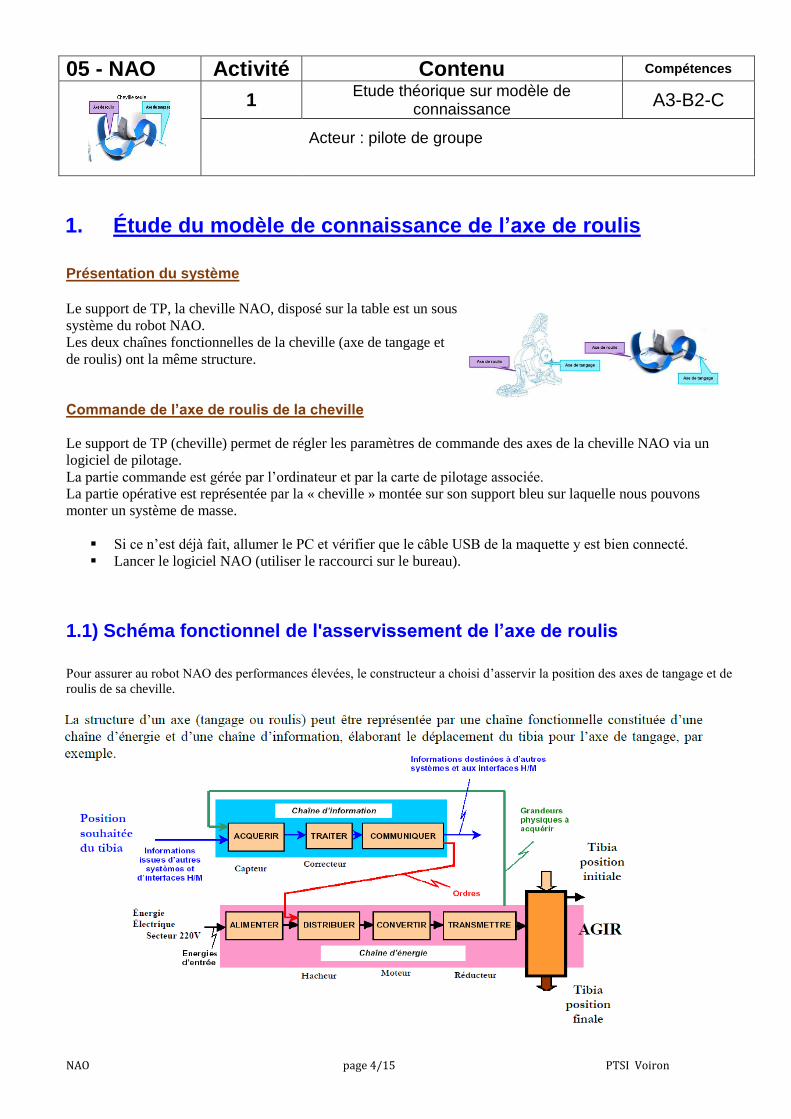
1.1) Schéma fonctionnel de l'asservissement de l’axe de roulis
Pour assurer au robot NAO des performances élevées, le constructeur a choisi d’asservir la position des axes de tangage et de
roulis de sa cheville.

NAO page 5/15 PTSI Voiron
De ce schéma organique, nous avons pu développer au cours du TP sur la modélisation des SLCI, ce schéma-bloc
complet de l'asservissement de position de l’axe de tangage, que nous avons modélisé sous Scilab :
Q1. Pendant 5 min, bien comprendre le schéma-bloc et légender sous chacun des blocs le nom des composants
associés (dans votre dossier réponse).
θtibia
NAO page 6/15 PTSI Voiron
Nous allons définir la fonction de transfert du système avec les conditions suivantes :
- J =4.8.10-7 kg/m2 (inertie du rotor moteur),
- Cr =0 (ce qui correspond à un positionnement vertical du tibia et sans masses additionnelles afin que le poids
n'intervienne pas dans le couple résistant),
- Ki =Kd =0 , Kp =400 (correcteur proportionnel)
- L =0.0006H
- Entrée test : Échelon de position de 30°.
La fonction de transfert du système, obtenue à l’aide du schéma-bloc présenté précédemment, que l’on a réduit
avec les données ci-dessus, est :
2.002.007.01
1
)(
)(
ppp
p
tc
t
(Modèle de connaissance)
TRAVAIL sur EXCEL (en salle info)
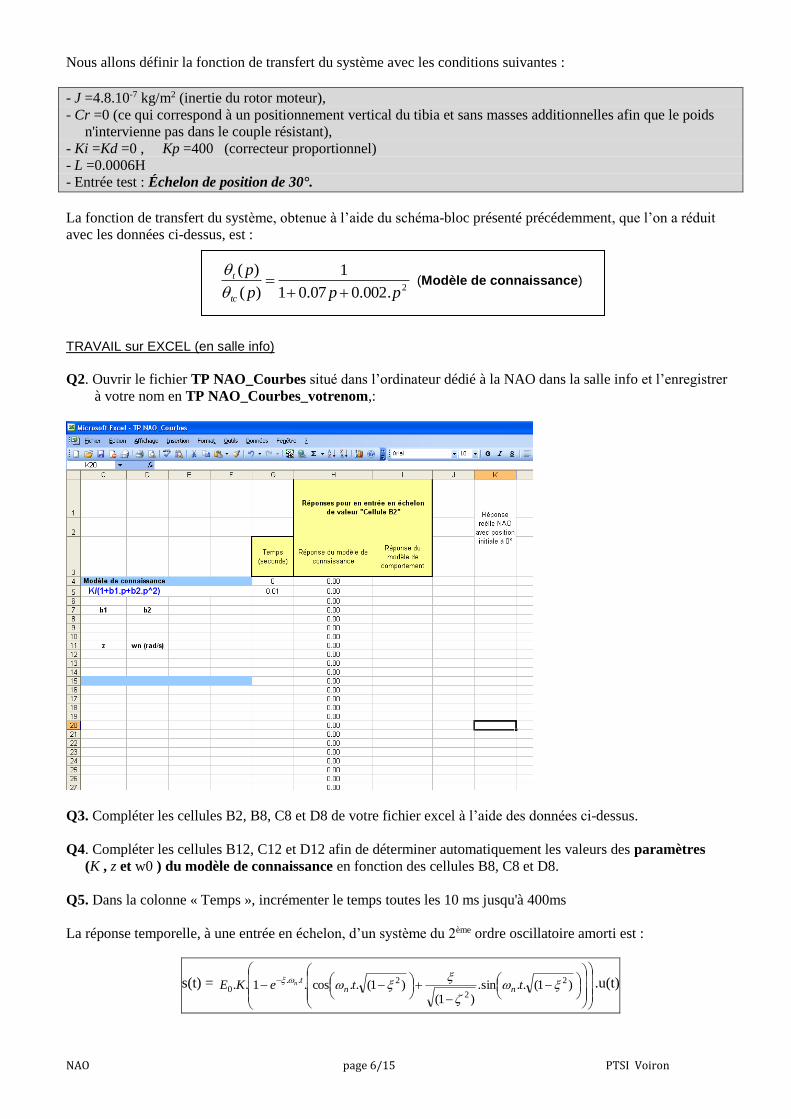
Q2. Ouvrir le fichier TP NAO_Courbes situé dans l’ordinateur dédié à la NAO dans la salle info et l’enregistrer
à votre nom en TP NAO_Courbes_votrenom,:
Q3. Compléter les cellules B2, B8, C8 et D8 de votre fichier excel à l’aide des données ci-dessus.
Q4. Compléter les cellules B12, C12 et D12 afin de déterminer automatiquement les valeurs des paramètres
(K , z et w0 ) du modèle de connaissance en fonction des cellules B8, C8 et D8.
Q5. Dans la colonne « Temps », incrémenter le temps toutes les 10 ms jusqu'à 400ms
La réponse temporelle, à une entrée en échelon, d’un système du 2ème ordre oscillatoire amorti est :
s(t) =
)1(..sin.)1(
)1(..cos.1.. 2
2
2..0
tteKE nntn .u(t)
NAO page 7/15 PTSI Voiron
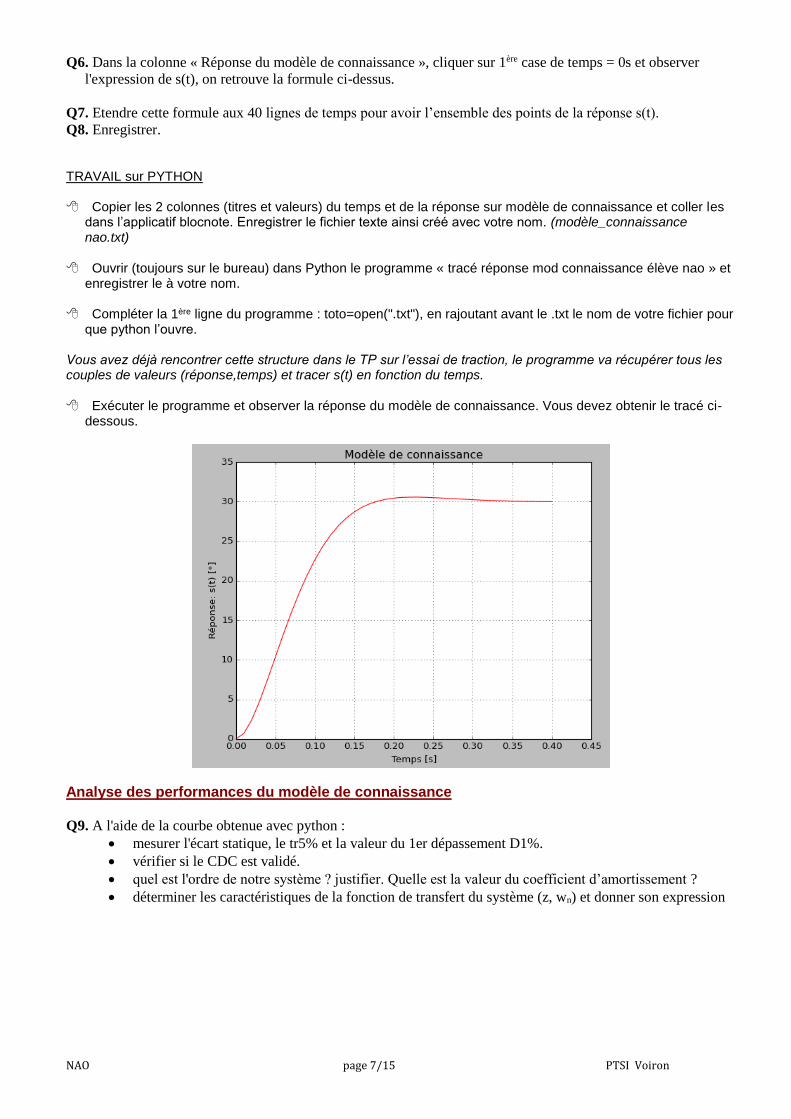
Q6. Dans la colonne « Réponse du modèle de connaissance », cliquer sur 1ère case de temps = 0s et observer
l'expression de s(t), on retrouve la formule ci-dessus.
Q7. Etendre cette formule aux 40 lignes de temps pour avoir l’ensemble des points de la réponse s(t).
Q8. Enregistrer. TRAVAIL sur PYTHON Copier les 2 colonnes (titres et valeurs) du temps et de la réponse sur modèle de connaissance et coller les
dans l’applicatif blocnote. Enregistrer le fichier texte ainsi créé avec votre nom. (modèle_connaissance nao.txt)
Ouvrir (toujours sur le bureau) dans Python le programme « tracé réponse mod connaissance élève nao » et
enregistrer le à votre nom. Compléter la 1ère ligne du programme : toto=open(".txt"), en rajoutant avant le .txt le nom de votre fichier pour
que python l’ouvre. Vous avez déjà rencontrer cette structure dans le TP sur l’essai de traction, le programme va récupérer tous les couples de valeurs (réponse,temps) et tracer s(t) en fonction du temps. Exécuter le programme et observer la réponse du modèle de connaissance. Vous devez obtenir le tracé ci-
dessous.
Analyse des performances du modèle de connaissance Q9. A l'aide de la courbe obtenue avec python :
mesurer l'écart statique, le tr5% et la valeur du 1er dépassement D1%.
vérifier si le CDC est validé.
quel est l'ordre de notre système ? justifier. Quelle est la valeur du coefficient d’amortissement ?
déterminer les caractéristiques de la fonction de transfert du système (z, wn) et donner son expression

NAO page 8/15 PTSI Voiron
06 - NAO Activité Contenu Compétences
2 Etude du modèle de comportement A3-B2-C
Acteur : expérimentateur
2. Étude du modèle de comportement (identification)
2.1) Expérimentation
Nous allons observer le comportement de l’axe de tangage pour un fonctionnement tel que :
- Cr=0 (ce qui correspond à un positionnement vertical du tibia et sans masses additionnelles afin que le poids
n'intervienne pas dans le couple résistant),
- Ki =Kd =0 , Kp =400 (correcteur proportionnel)
- Essai réalisé : Échelon de position de 30°.
Q10. Expérimentation
A l’aide de la procédure suivante mettre l’axe de roulis en
position initiale à 0°, réaliser :
Mettre Aucun (aucune entrée) pour l'axe de tangage
Mettre Echelon pour l'axe de roulis
Paramètre amplitude : 0°
Angle initial 0°
En cliquant sur onglet PID_ch roulis, régler Kp=400 ;
Ki=0 et Kd=0
Vérifier la présence de la coche Départ en position de
référence
Cliquer l'onglet Mesure
l’axe de roulis se met alors en position verticale
Avec la même procédure mettre l’axe de tangage en
position initiale à 0°:
NAO page 9/15 PTSI Voiron
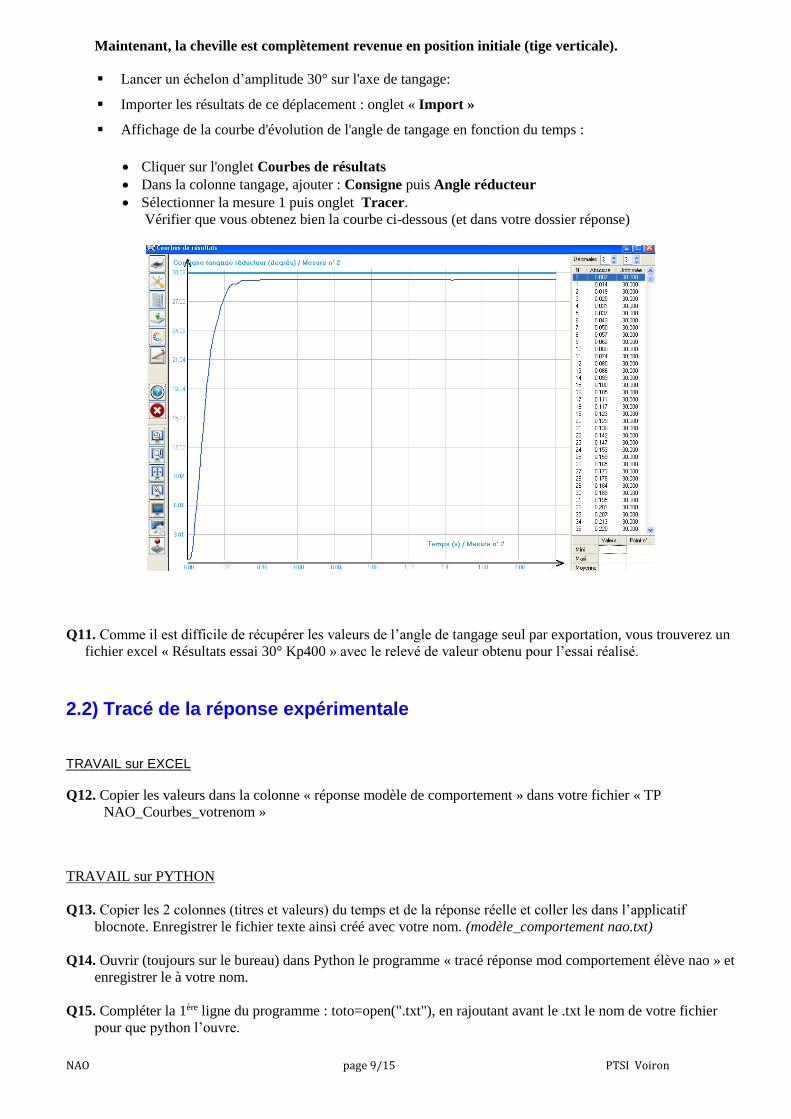
Maintenant, la cheville est complètement revenue en position initiale (tige verticale).
Lancer un échelon d’amplitude 30° sur l'axe de tangage:
Importer les résultats de ce déplacement : onglet « Import »
Affichage de la courbe d'évolution de l'angle de tangage en fonction du temps :
Cliquer sur l'onglet Courbes de résultats
Dans la colonne tangage, ajouter : Consigne puis Angle réducteur
Sélectionner la mesure 1 puis onglet Tracer.
Vérifier que vous obtenez bien la courbe ci-dessous (et dans votre dossier réponse)
Q11. Comme il est difficile de récupérer les valeurs de l’angle de tangage seul par exportation, vous trouverez un
fichier excel « Résultats essai 30° Kp400 » avec le relevé de valeur obtenu pour l’essai réalisé.
2.2) Tracé de la réponse expérimentale TRAVAIL sur EXCEL
Q12. Copier les valeurs dans la colonne « réponse modèle de comportement » dans votre fichier « TP
NAO_Courbes_votrenom »
TRAVAIL sur PYTHON
Q13. Copier les 2 colonnes (titres et valeurs) du temps et de la réponse réelle et coller les dans l’applicatif
blocnote. Enregistrer le fichier texte ainsi créé avec votre nom. (modèle_comportement nao.txt)
Q14. Ouvrir (toujours sur le bureau) dans Python le programme « tracé réponse mod comportement élève nao » et
enregistrer le à votre nom.
Q15. Compléter la 1ère ligne du programme : toto=open(".txt"), en rajoutant avant le .txt le nom de votre fichier
pour que python l’ouvre.

NAO page 10/15 PTSI Voiron
Q16. Exécuter le programme et observer la réponse du modèle de comportement. Vous devez obtenir le tracé ci-
dessous.
Analyse des performances du modèle de comportement Q17. A l'aide de la courbe obtenue avec python (voir votre dossier réponse) :
mesurer l'écart statique, le tr5% et la valeur du 1er dépassement D1%.
vérifier si le CDC est validé.
quel est l'ordre de notre système ? justifier. Quelle est la valeur du coefficient d’amortissement ?
déterminer les caractéristiques de la fonction de transfert du système (z, wn) et donner son expression
NAO page 11/15 PTSI Voiron
05 - NAO Activité Contenu Compétences
3 Etude du modèle simulé B2
Acteur : modélisateur
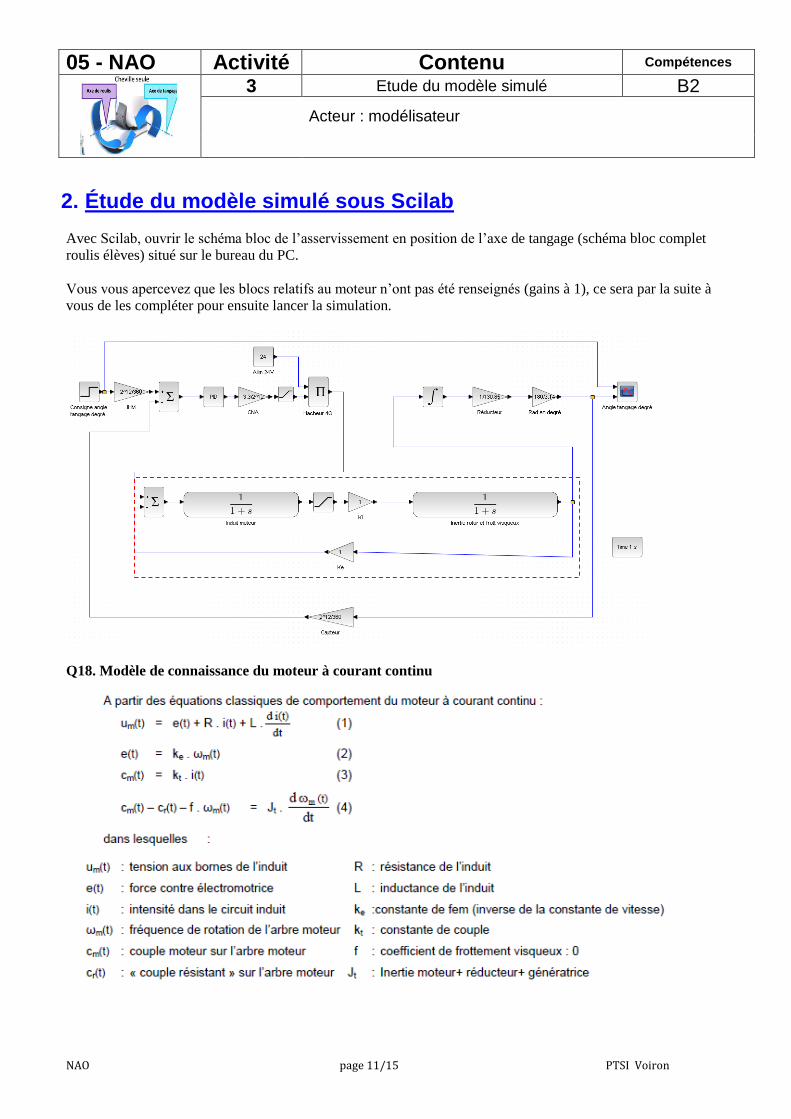
2. Étude du modèle simulé sous Scilab
Avec Scilab, ouvrir le schéma bloc de l’asservissement en position de l’axe de tangage (schéma bloc complet
roulis élèves) situé sur le bureau du PC.
Vous vous apercevez que les blocs relatifs au moteur n’ont pas été renseignés (gains à 1), ce sera par la suite à
vous de les compléter pour ensuite lancer la simulation.
Q18. Modèle de connaissance du moteur à courant continu

NAO page 12/15 PTSI Voiron
Déterminer les fonctions de transfert de chacun des blocs du schéma.
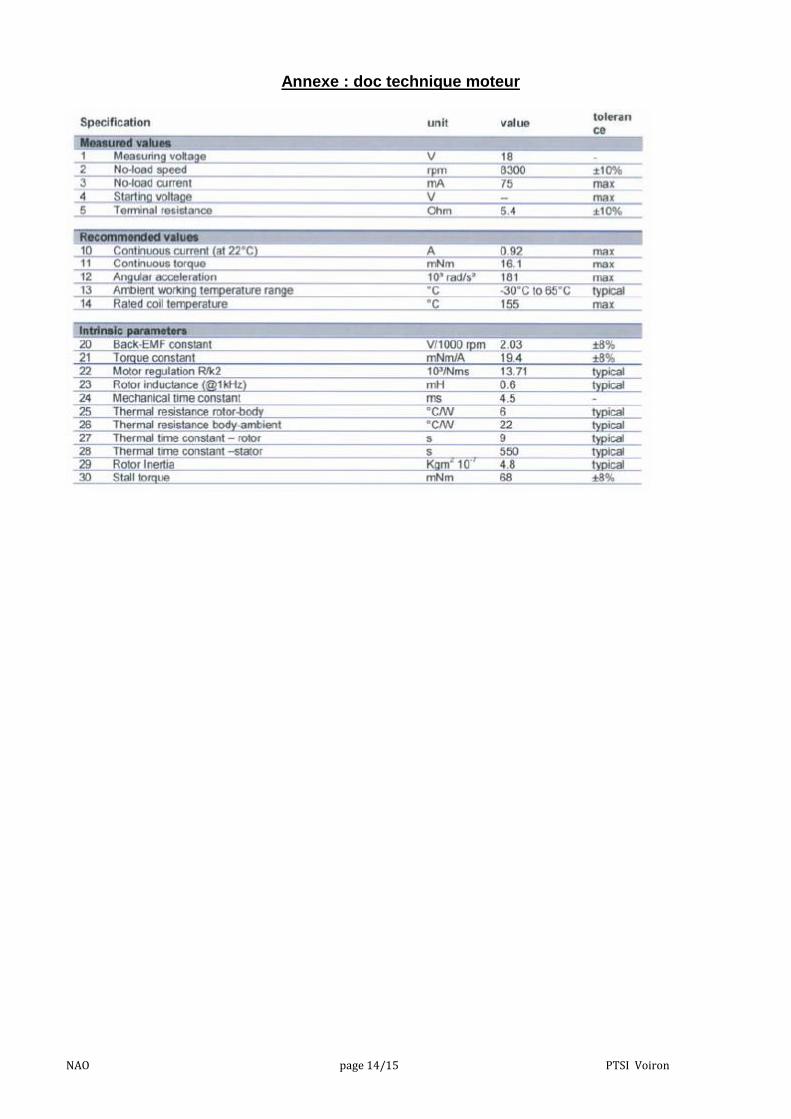
Déterminer en vous aidant de la doc technique donnée en annexe les valeurs de R,L,J,Ke et Kt
On donne : f=2e-5.
Q19.
Dans Scilab, ouvrir le schéma bloc du moteur seul : « schéma bloc moteur seul cheville nao » et vérifier les
valeurs attribuées pour chacun des blocs.
Tester avec un échelon de tension de 18V. Retrouve t-on la vitesse du doc technique en sortie ?
Q20.
A l’aide de Scilab, réouvrir le schéma bloc de l’asservissement en position de l’axe de tangage et compléter
les blocs relatifs au moteur puis lancer un échelon de tangage de 30° avec Kp=400.
Vérifier que vous obtenez bien la courbe de la réponse temporelle si dessous (et dans votre dossier réponse)
Analyse des performances du modèle simulé (Scilab) Q21. Pour gagner du temps nous avons tracé pour vous dans python la réponse du modèle simulé. A l'aide de la
courbe obtenue avec python (voir votre dossier réponse) :
mesurer l'écart statique, le tr5% et la valeur du 1er dépassement D1%.
vérifier si le CDC est validé.
quel est l'ordre de notre système ? justifier. Quelle est la valeur du coefficient d’amortissement ?
déterminer les caractéristiques de la fonction de transfert du système (z, wn) et donner son expression
NAO page 13/15 PTSI Voiron
05 - NAO Activité Contenu Compétences
5 Analyse des écarts C
Acteur : groupe
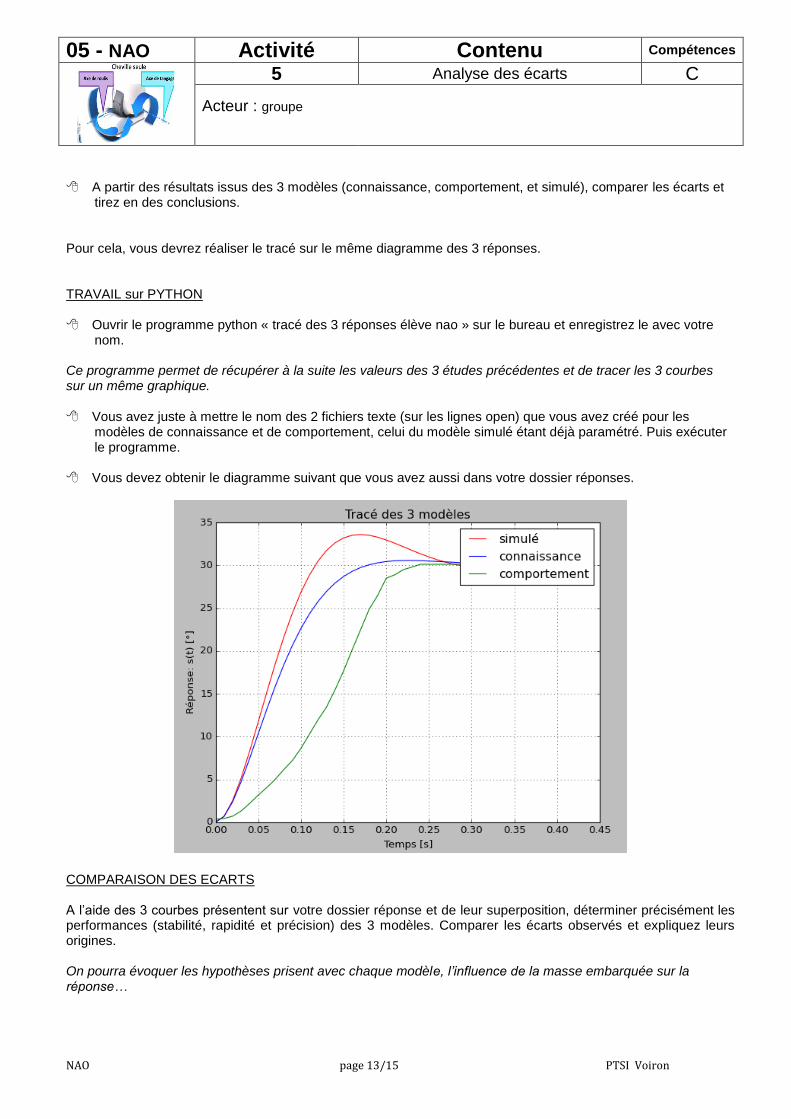
A partir des résultats issus des 3 modèles (connaissance, comportement, et simulé), comparer les écarts et
tirez en des conclusions. Pour cela, vous devrez réaliser le tracé sur le même diagramme des 3 réponses. TRAVAIL sur PYTHON Ouvrir le programme python « tracé des 3 réponses élève nao » sur le bureau et enregistrez le avec votre
nom. Ce programme permet de récupérer à la suite les valeurs des 3 études précédentes et de tracer les 3 courbes sur un même graphique. Vous avez juste à mettre le nom des 2 fichiers texte (sur les lignes open) que vous avez créé pour les
modèles de connaissance et de comportement, celui du modèle simulé étant déjà paramétré. Puis exécuter le programme.
Vous devez obtenir le diagramme suivant que vous avez aussi dans votre dossier réponses.
COMPARAISON DES ECARTS A l’aide des 3 courbes présentent sur votre dossier réponse et de leur superposition, déterminer précisément les performances (stabilité, rapidité et précision) des 3 modèles. Comparer les écarts observés et expliquez leurs origines. On pourra évoquer les hypothèses prisent avec chaque modèle, l’influence de la masse embarquée sur la réponse…
NAO page 14/15 PTSI Voiron
Annexe : doc technique moteur
NAO page 15/15 PTSI Voiron
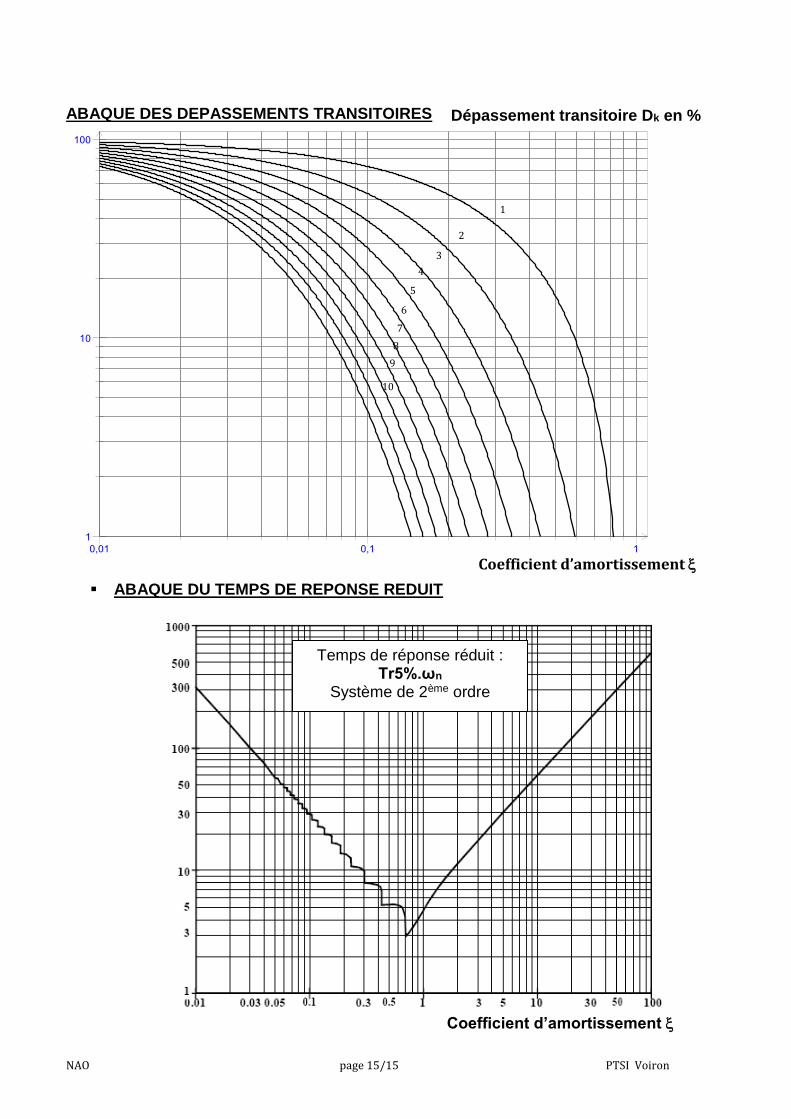
ABAQUE DES DEPASSEMENTS TRANSITOIRES
ABAQUE DU TEMPS DE REPONSE REDUIT
1
2
3
4
5
6
7
8
9
10
Coefficient d’amortissement
Dépassement transitoire Dk en %
Coefficient d’amortissement
Temps de réponse réduit : Tr5%.ωn
Système de 2ème ordre
Recommended

















