Exposure In Wireless Exposure In Wireless Ad-Hoc Sensor Ad-Hoc Sensor
NetworksNetworks
Seapahn MeguerdichianSeapahn MeguerdichianComputer Science Department
University of California, Los Angeles
Farinaz KoushanfarFarinaz KoushanfarDepartment of EE and CS
University of California Berkeley
Gang QuGang QuElectrical and Computer Engineering Department
University of Maryland
Miodrag PotkonjakMiodrag PotkonjakComputer Science Department
University of California, Los Angeles
Presented by John Sweeney. Slides courtesy of the author.

Sensor CoverageSensor Coverage Given:Given:
Field Field AA NN sensors sensors
How well can the field be observed ?How well can the field be observed ?
Closest Sensor (minimum distance) onlyClosest Sensor (minimum distance) only Worst Case Coverage: Worst Case Coverage: Maximal Breach PathMaximal Breach Path Best Case Coverage: Best Case Coverage: Maximal Support PathMaximal Support Path
Multiple Sensors: speed and path consideredMultiple Sensors: speed and path considered
Minimal Exposure PathMinimal Exposure Path
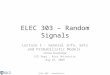
Maximal Breach PathMaximal Breach Path
By construction, each line-segment maximizes distance from the nearest point (sensor).
Consequence: Path of Maximal Breach of Surveillance in the sensor field lies on the Voronoi diagram lines.
Voronoi DiagramVoronoi Diagram

Graph-Theoretic Graph-Theoretic FormulationFormulation
Given: Voronoi diagram D with vertex set V and line segment set L and sensors S
Construct graph G(N,E): • Each vertex viV corresponds
to a node ni N
• Each line segment li L
corresponds to an edge ei E
• Each edge eiE, Weight(ei) = Distance of li from closest sensor sk S
Formulation: Is there a path from I to F which uses no edge of weight less than K?

Maximal Support PathMaximal Support Path
Given: Delaunay Triangulation
of the sensor nodes
Construct graph G(N,E): The graph is dual to the Voronoi
graph previously described
Formulation: what is the path from which the agent can best be observed while moving from I to F? (The path is embedded in the Delaunay graph of the sensors)
Solution: Similar to the max breach algorithm, use BFS and Binary Search to find the shortest path on the Delaunay graph.
I F
PS

Exposure - SemanticsExposure - Semantics Likelihood of detection by sensors Likelihood of detection by sensors
function of time interval and distance function of time interval and distance from sensors.from sensors.
Minimal exposure paths indicate the Minimal exposure paths indicate the worst case scenarios in a field:worst case scenarios in a field: Can be used as a metric for coverage Can be used as a metric for coverage
Sensor detection coverageSensor detection coverage Wireless (RF) transmission coverageWireless (RF) transmission coverage
For RF transmission, exposure is a For RF transmission, exposure is a potential measure of quality of potential measure of quality of service along a specific path.service along a specific path.

Preliminaries: Sensing Preliminaries: Sensing ModelModel
[ ]KpsdpsS
),(),(
λ=
Sensing model Sensing model SS at an arbitrary point at an arbitrary point p p for for a sensor a sensor s s ::
where where d(s,p)d(s,p) is the Euclidean distance between is the Euclidean distance between the sensor the sensor ss and the point and the point pp, and positive , and positive constants constants and and K K are technology- and are technology- and environment-dependent parameters.environment-dependent parameters.

Preliminaries: Intensity Preliminaries: Intensity Model(s)Model(s)
Effective sensing intensity at point Effective sensing intensity at point pp in field in field F F ::
∑=n
iA psSpFI1
),(),(
),(),(
),(),(
min
min
psSpFI
SspsdpsdSss
C
mm
=
∈∀≤∈=
All All SensorsSensors
Closest Closest SensorSensor
KK Closest Sensors Closest SensorsK=3K=3 for Trilateration for Trilateration

Definition: ExposureDefinition: Exposure
The The ExposureExposure for an object for an object OO in the in the sensor field during the interval [sensor field during the interval [tt11,t,t22]] along along
the path the path p(t)p(t) is: is:
( ) ( )∫Δ
=2
1
)()(, ,),( 21
t
t
dtdt
tdptpFItttpE

Exposure – Coverage Problem Exposure – Coverage Problem FormulationFormulation
Given:Given: Field Field AA NN sensors sensors Initial and final points Initial and final points II and and FF
Problem:Problem:
Find the Find the Minimal Exposure Path Minimal Exposure Path PPminEminE in in AA, starting in , starting in I I and ending in and ending in FF..
PPminE minE is the path in is the path in A,A, along which the along which the exposure is the smallest among all paths exposure is the smallest among all paths from from II to to FF..

Special Case – One SensorSpecial Case – One Sensor
pS =(1,-1)
s = (0,0) x
y
pD =(-1,1)
Minimal exposure path for one sensor in a Minimal exposure path for one sensor in a square field:square field:

General Exposure General Exposure ComputationsComputations Analytically intractable.Analytically intractable.
Need efficient and scalable methods to Need efficient and scalable methods to approximate exposure integrals and search approximate exposure integrals and search for Minimal Exposure Paths.for Minimal Exposure Paths.
Use a grid-based approach and Use a grid-based approach and numerical methods to approximate numerical methods to approximate Exposure integrals.Exposure integrals.
Use existing efficient graph search Use existing efficient graph search algorithms to find Minimal Exposure algorithms to find Minimal Exposure Paths.Paths.

Minimal Exposure Path Minimal Exposure Path AlgorithmAlgorithm Use a grid to approximate path exposures.Use a grid to approximate path exposures.
The exposure (weight) along each edge of The exposure (weight) along each edge of the grid approximated using numerical the grid approximated using numerical techniques.techniques.
Use Dijkstra’s Single-Source Shortest Path Use Dijkstra’s Single-Source Shortest Path Algorithm on the weighted graph (grid) to Algorithm on the weighted graph (grid) to find the find the Minimal Exposure PathMinimal Exposure Path. .
Can also use Floyd-Warshall All-Pairs Can also use Floyd-Warshall All-Pairs Shortest Paths Algorithm to find Shortest Paths Algorithm to find PPminEminE between arbitrary start and end points.between arbitrary start and end points.

Generalized GridGeneralized Grid
(a) n=2, m=1 (b) n=2, m=2 (c) n=2, m=3
Generalized Grid – 1Generalized Grid – 1stst order, 2 order, 2ndnd order, 3 order, 3rdrd order …order …More movement freedom More movement freedom more accurate more accurate resultsresults
Approximation quality improves by increasing grid divisionsApproximation quality improves by increasing grid divisionswith higher costs of storage and run-time. with higher costs of storage and run-time.

Minimal Exposure Path Algorithm Minimal Exposure Path Algorithm ComplexityComplexity
Single Source Shortest Path Single Source Shortest Path (Dijkstra)(Dijkstra) Each point is visited once in the worst case.Each point is visited once in the worst case. For an nxn grid with m divisions per edge:For an nxn grid with m divisions per edge:
nn22(2m-1)+2nm+1 total grid points.(2m-1)+2nm+1 total grid points. Worst case search: Worst case search: O(nO(n22m)m) Dominated by grid construction.Dominated by grid construction. 1GHz workstation with 256MB RAM requires less 1GHz workstation with 256MB RAM requires less
than 1 minute for n=32, m=8 grids. than 1 minute for n=32, m=8 grids.
All-Pairs Shortest Paths All-Pairs Shortest Paths (Floyd-Warshall)(Floyd-Warshall) Has a average case complexity of O(pHas a average case complexity of O(p33).). Dominated by the search: Dominated by the search: O((nO((n22m)m)33)) Requires large data structures to store paths.Requires large data structures to store paths.

PPminEminE – Uniform Random – Uniform Random DeploymentDeployment
Minimal exposure path for 50 randomly deployed sensors Minimal exposure path for 50 randomly deployed sensors using the All-Sensor intensity model (using the All-Sensor intensity model (IIAA).).
8x8 m=18x8 m=1Exposure:Exposure: 0.70790.7079Length:Length: 1633.91633.9
16x16 m=216x16 m=2Exposure:Exposure: 0.69760.6976Length:Length: 1607.71607.7
32x32 m=832x32 m=8Exposure:Exposure: 0.69450.6945Length:Length: 1581.01581.0

Exposure – Statistical Exposure – Statistical BehaviorBehavior
20 52 84 116 1480.05
0.1
0.15
0.2
0.25
0.3
Number of Sensors
Relative Std. Dev.
Exposure(d-2 Sensor Model)
Closest
All
20 52 84 116 1480.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2Exposure
(d-4 Sensor Model)
Number of Sensors
Relative Std. Dev.All
Closest
Diminishing relative standard deviation in exposure for 1/d2 and 1/d4 sensor models.
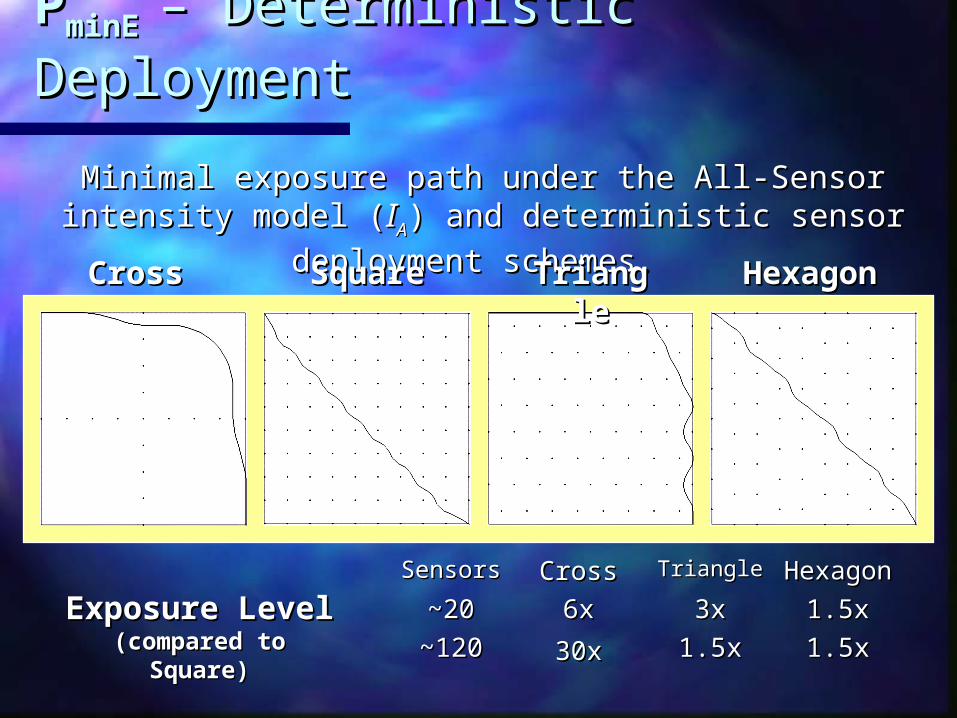
PPminEminE – Deterministic – Deterministic DeploymentDeployment
Minimal exposure path under the All-Sensor intensity model Minimal exposure path under the All-Sensor intensity model ((IIAA) and deterministic sensor deployment schemes. ) and deterministic sensor deployment schemes.
CrossCross SquareSquare TriangleTriangle HexagonHexagon
Exposure LevelExposure Level(compared to Square)(compared to Square) 1.5x1.5x1.5x1.5x30x30x~120~120
1.5x1.5x3x3x6x6x~20~20HexagonHexagonTriangleTriangleCrossCrossSensorsSensors

Exposure – Research Exposure – Research DirectionsDirections Localized implementationsLocalized implementations
Performance and cost studies subject toPerformance and cost studies subject to Wireless Protocols (MAC, routing, etc)Wireless Protocols (MAC, routing, etc) Errors in measurementsErrors in measurements
LocationingLocationing SensingSensing Numerical errorsNumerical errors
Computation based on incomplete Computation based on incomplete informationinformation
Not every node will know the exact position and Not every node will know the exact position and information about all other nodesinformation about all other nodes

SummarySummary Exposure:Exposure:
DefinitionDefinition Efficient AlgorithmEfficient Algorithm Centralized ImplementationCentralized Implementation
Algorithm:Algorithm: Generalized grid approximationGeneralized grid approximation Application of graph search algorithmsApplication of graph search algorithms
Ad-hoc wireless sensor networks:Ad-hoc wireless sensor networks: CoverageCoverage Quality of ServiceQuality of Service
Research:Research: Numerous interesting open problemsNumerous interesting open problems
Recommended