EEM 4216
ROBOTİK
DERS_1: ROBOTİGE GİRİŞ
Sezai TAŞKIN
Prof. Dr.

Ders Hakkında
Dersin Amacı:
Robotiğin temel kavramları ile robot kolunun kinematik ve dinamik analizinin temelleri ve robot kontrolü hakkında bilgi vermek.
Ders İçeriği:
Giriş, Robotların Sınıflandırılması, Robot Kolu Kinematiği, Robot Kolu
Dinamiği,
Yörünge Planlaması, Robot Kontrolu, Robot Sensörleri, Robotlarda
Programlama.
Ders Kitabı
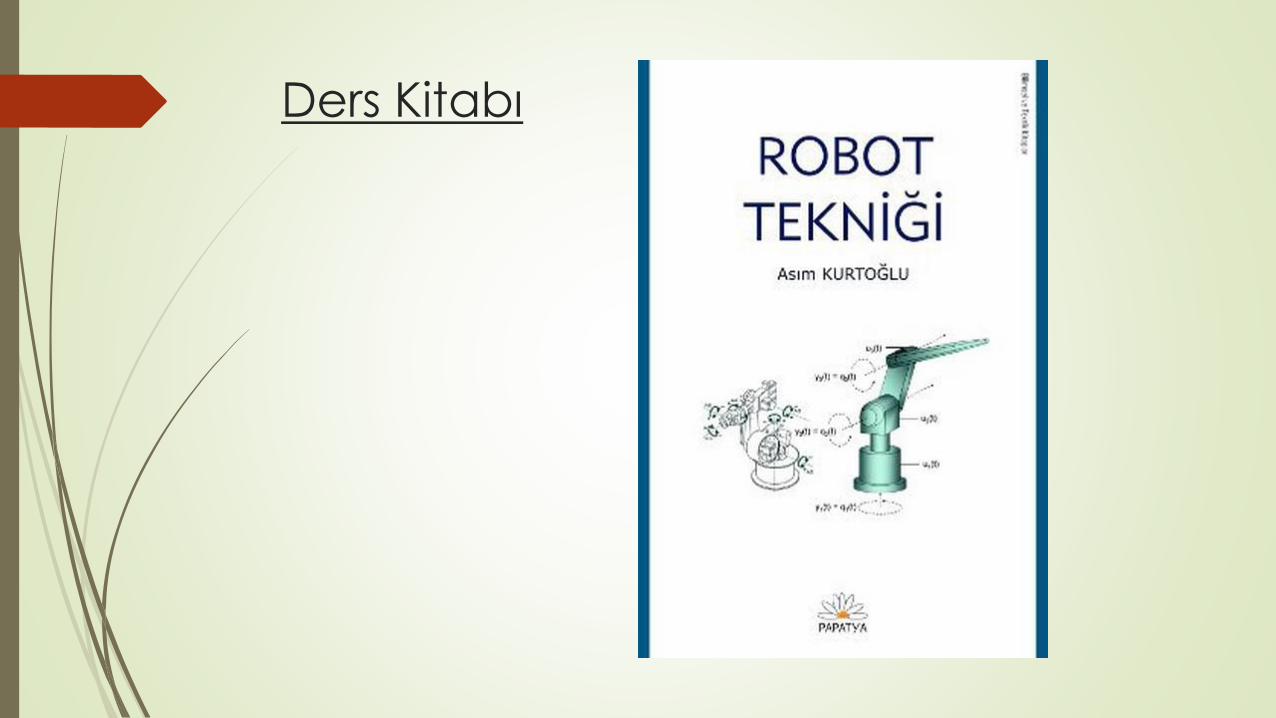
History
800 BC - Homer: walking tripods in the Iliad
350 BC - Aristotle envisions mechanisms that work by "obeying or anticipating the will of others«
1495 - Leonardo DaVinci designed a mechanical device that looked like an armored knight, which moved in humanlike motions.
1640 - Descartes builds a female automaton which he calls “Ma fille Francine.”
1738 - Jacques de Vaucanson builds a mechanical duck made of more that 4,000 parts. The duck could quack, bathe, drink water, eat grain, digest it and void it.
1770 - Swiss clock makers and inventors Pierre Jaquet-Droz and his son Henri-Louis created three doll automata: write, play music, and draw pictures.

History 1898 - Tesla built and demonstrated a radio controlled robot boat at Madison
Square Garden*.
1923 - Karel Capek coins the term robot in his play Rossum’s Universal Robots (R.U.R). Robot “might come” from the Czech word robota, which means “servitude, forced labor.”
1962 - First industrial arm, the Unimate, is introduced
Rossum’s Universal Robots (R.U.R)
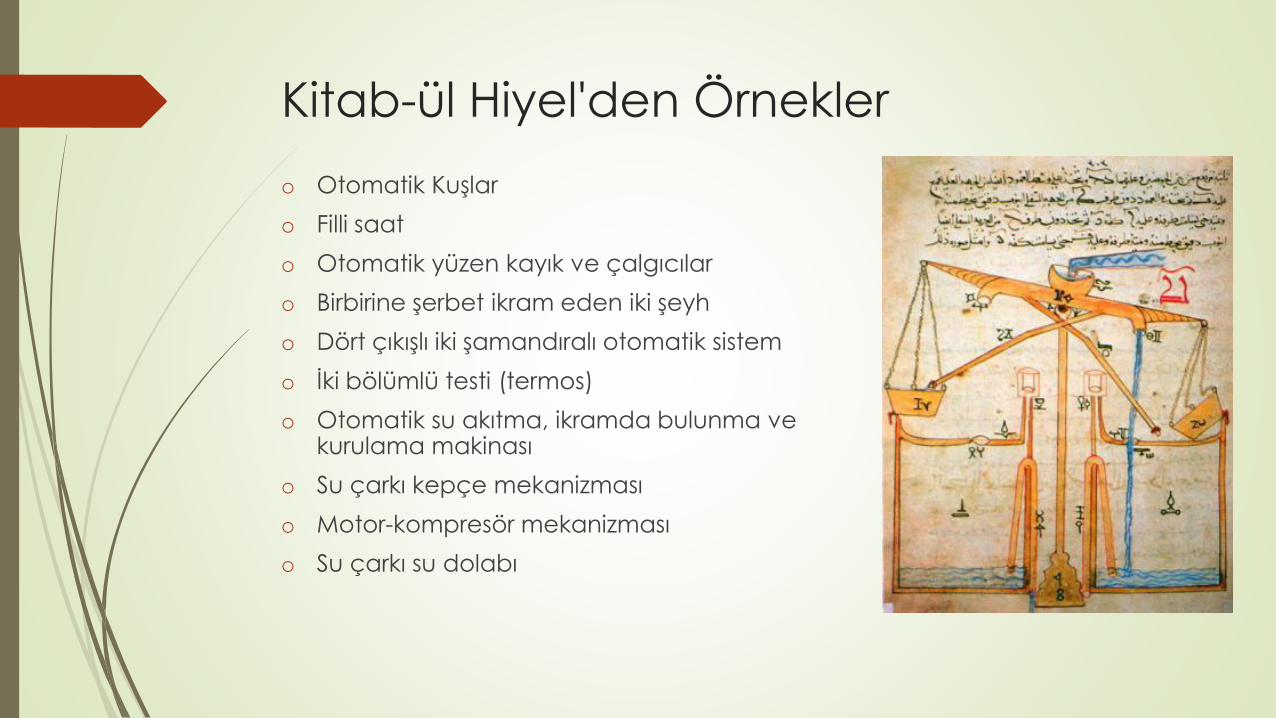
Kitab-ül Hiyel'den Örnekler
o Otomatik Kuşlar
o Filli saat
o Otomatik yüzen kayık ve çalgıcılar
o Birbirine şerbet ikram eden iki şeyh
o Dört çıkışlı iki şamandıralı otomatik sistem
o İki bölümlü testi (termos)
o Otomatik su akıtma, ikramda bulunma ve kurulama makinası
o Su çarkı kepçe mekanizması
o Motor-kompresör mekanizması
o Su çarkı su dolabı

Bilim Dünyasına Bizden Katkılar: El Cezeri
https://www.youtube.com/watch?time_continue=1&v=gozJ_HmanQ8

Endüstriyel Robotlar
Robotik genel anlamda makina, elektrik-elektronik ve bilgisayar gibi
alanların birleşiminden oluşan genel amaçlı programlanabilir makina
sistemlerine yönelik çok disiplinli modern bir bilimdir.
Dünyada robotiğin ilk temelleri 1136-1208 yılları arasında yaşamış olan El-
Cezeri tarafından atılmıştır.
Bununla birlikte robot kelimesi ilk defa 1922 yılında Çek yazar Karel Capek
tarafından Slav dilinde işçi, köle, esir anlamına gelen ‘robota’ kelimesinden
türetilmiştir.
Robotik kelimesi ise ilk defa Isaac Asimov tarafından kullanılmıştır.
Ref. ERPE-METEG

Isaac Asimov's "Three Laws of Robotics"
A robot may not injure a human being or, through inaction, allow a human being to come to harm.
A robot must obey orders given it by human beings except where such orders would conflict with the First Law.
A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
Kural – 1: Bir robot insanlara zarar vermemelidir, ayrıca pasif kalarak zarar görmesine seyirci kalmamalıdır.
Kural – 2: Birinci kuralla çelişmediği sürece, bir robot insanlar tarafından verilen komutlara uymalıdır.
Kural – 3: Birinci veya İkinci kuralla çelişmediği sürece, bir robot kendi varlığını korumalıdır.

Robot
“Robot, yeniden programlanabilen; malzemeleri,
parçaları, özel cihazları çeşitli programlanmış hareketlerle
yapılacak işe göre taşıyan veya işleyen çok fonksiyonlu
bir manipülatördür.”
Ref. ERPE-METEG

Endüstriyel Robotların Tarihçesi
https://www.youtube.com/watch?v=xyj6N-i6asQ

Endüstriyel Robotların Avantajları
İnsanların fiziksel özellikleri zorlayan ağır ve büyük işlerde çalışabilirler,
İnsan sağlığı için elverişsiz ve tehlikeli koşullarda çalışabildiklerinden işyeri
güvenliğini artırırlar,
Sahip oldukları yüksek hassasiyet ve tekrarlanabilirlik sayesinde ürün
kalitesinde standartları korurlar,
Bozuk üretim miktarı azaltılarak, hammadde israfı engellenir ve üretim
maliyetini düşürürler,
Yeniden programlama sayesinde yeni bir işe kolayca adapte edilebilirler,
Monoton, sıkıcı ve yorucu işlerde hızlı bir şekilde verimi ve ürün kalitesini
düşürmeden sürekli çalışarak daha çok iş yapabilirler,
Uzaktan erişim, yönetim, kontrol edilebilme özelliklerine sahiptirler,
Aynı ortamda birlikte sorunsuz ve hızlı bir şekilde çalışabilmektedirler,
İşyeri güvenliği, sağlık, eğitim, sigorta vb. giderlerin azaltılmasıyla birlikte ucuz
işgücü sağlarlar,
Ref. ERPE-METEG

Endüstriyel Robotların Dezavantajları
İşgücünün ucuzlaması nedeniyle işsizlik problemlerine yol açabilmektedirler,
Programlama sorunlarında istenmeyen zararlı sonuçlara neden olabilmektedirler,
Tekrarlı işlerde yapılan bir hesaplama hatası tüm üretilen ürünlere yansıyabilmektedir.
Yukarıda ifade edilen işsizlik problemlerine yönelik olarak; aslında teknolojik gelişmeler, bilgi toplumu olma yolunda insanların bedenini değil, zihnini zorlayan işlerle uğraşmasına neden olmaktadır. Böylelikle de ihtiyaç sebebiyle yeni robotların tasarlanması, geliştirilmesi ve programlanmasının yanı sıra robot ve çevre ekipmanların bakım-onarım ve tamiri, robot üretim tesislerinin kurulumu vb. yeni iş imkanlarının oluşmasına yol açmaktadır.
Ref. ERPE-METEG

Endüstriyel Robotların Uygulama
Alanları
Diğer20%
Montaj10%
Kaynak30%
Handling40%
Diğer Montaj Kaynak Handling

Endüstriyel Robotların temel kullanım
alanları
Handling (Malzeme seçme, taşıma, sıralama, yerleştirme vb.) uygulamalarında,
Montaj (Mounting) ve Sökme uygulamalarında,
Nokta Kaynak (Spot Welding),
Ark Kaynak ve Rotalı Kaynak uygulamalarında,
Yapıştırma/Sızdırmazlık maddeleri uygulamalarında
Malzeme İşleme (Frezeleme vb.) uygulamalarında,
Çapak temizleme, parlatma, boyama vb. uygulamalarda,
Paketleme, stok ve yükleme uygulamalarında,
Döküm, presleme, dövme vb. uygulamalarda,
Ölçüm ve kontrol uygulamalarında
Ref. ERPE-METEG
Recommended