DCモータの動作原理と設計
-- DCモーターを発電機に--
設計製作プロジェクトA
国士舘大学理工学部機械工学系
岸本 健
このテキストは、http://www.comb.kokushikan.ac.jp/~ken/subj/DCmotor.pdf から
ダウンロードできます。

モーターの種類
● 直流モータ– ブラシモーター
– ブラシレスモータ
● 同期モータ– ステッピングモータ
● 交流モータ(三相、単相)– 誘導型モータ
– 整流子モータ
● そのほか– リニアモータ
– 振動モータ(超音波モータ)

直流モーター
ブラシモーター ブラシレスモーター
● ブラシ:回転を継続させるための電流切替器ノイズの元

同期モーター
インホイールモーター
ロータステータ
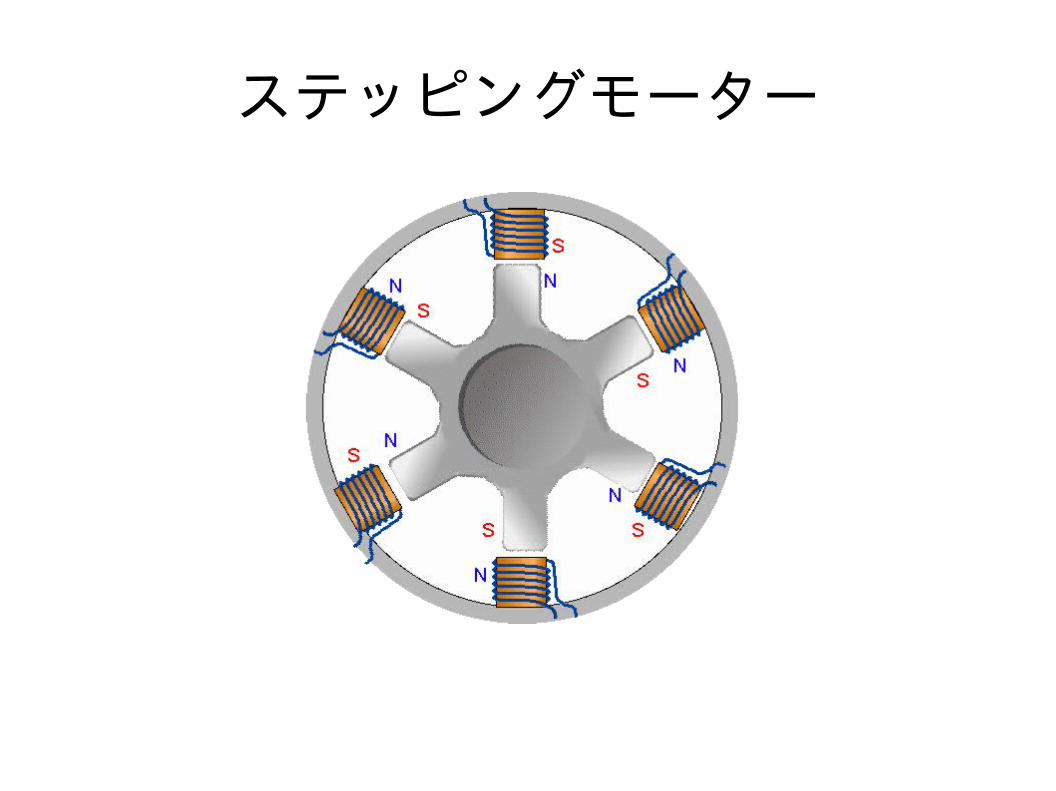
ステッピングモーター
直流発電機の種類
定電圧発電機
一定の電圧を出す発電機
回転数制御
可変電圧発電機–ワードレオナード制御
–サイリスタレオナード制御
● 他励方式
● 自励方式– 分巻発電機
– 複巻発電機
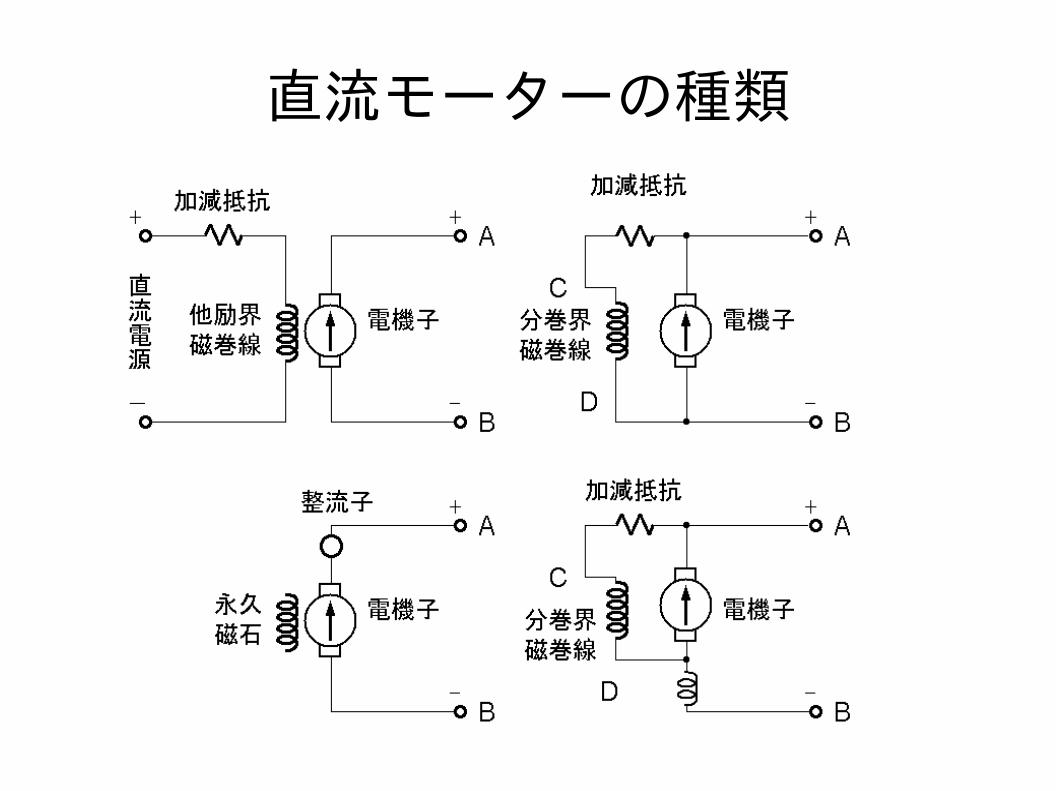
直流モーターの種類
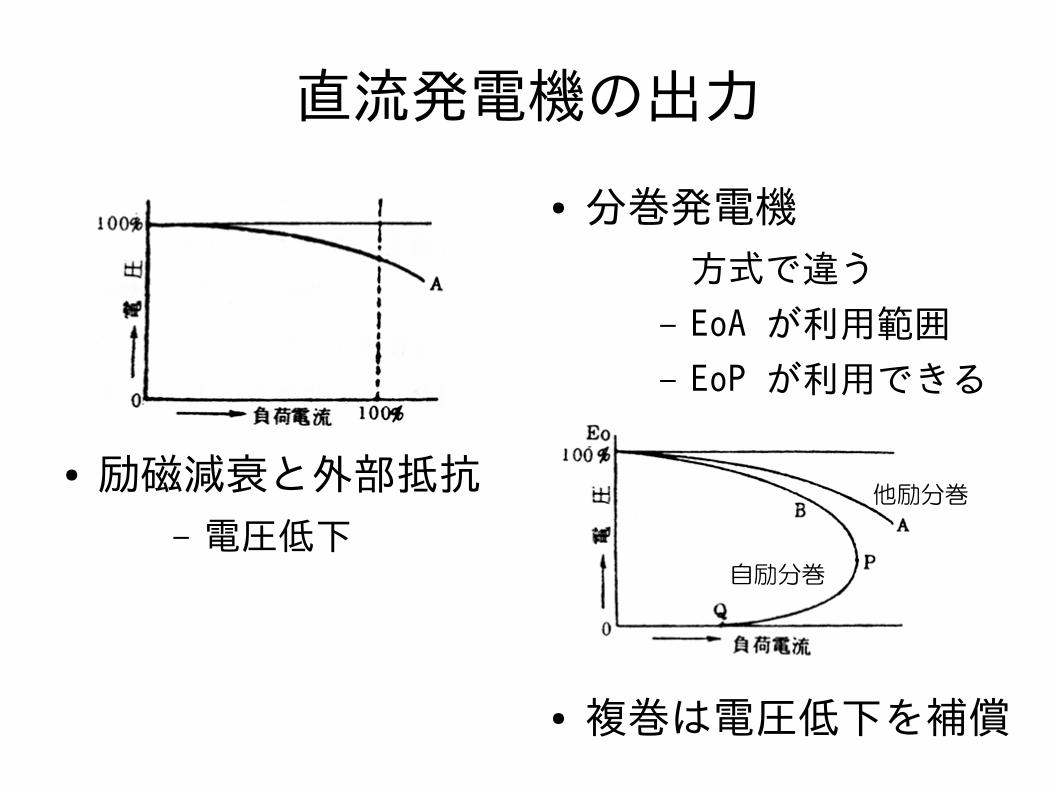
直流発電機の出力
● 励磁減衰と外部抵抗– 電圧低下
● 分巻発電機
方式で違う
– EoA が利用範囲
– EoP が利用できる
● 複巻は電圧低下を補償
他励分巻
自励分巻

直流発電機の応用
● タコメータ● 自転車ランプ用発電機
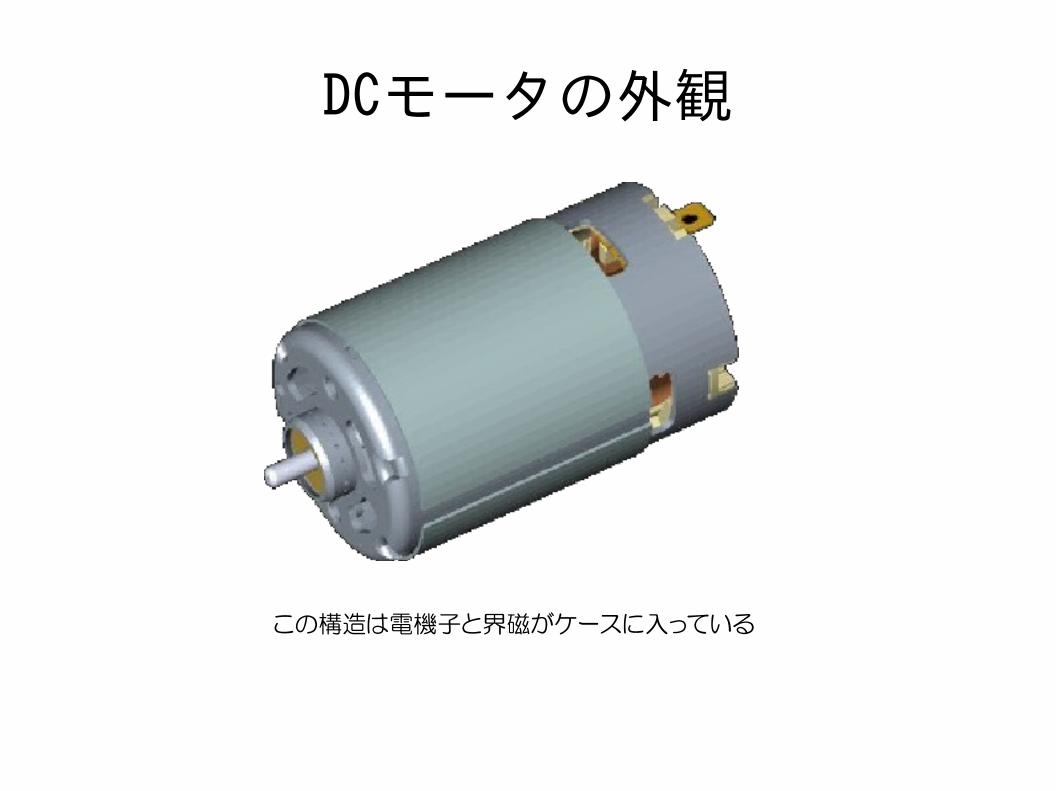
DCモータの外観
シャフト
この構造は電機子と界磁がケースに入っている

エンドベルキャップ
完成ロータ(電機子)
ハウジング(永久磁石の界磁が入っている)
DCモータの構造1
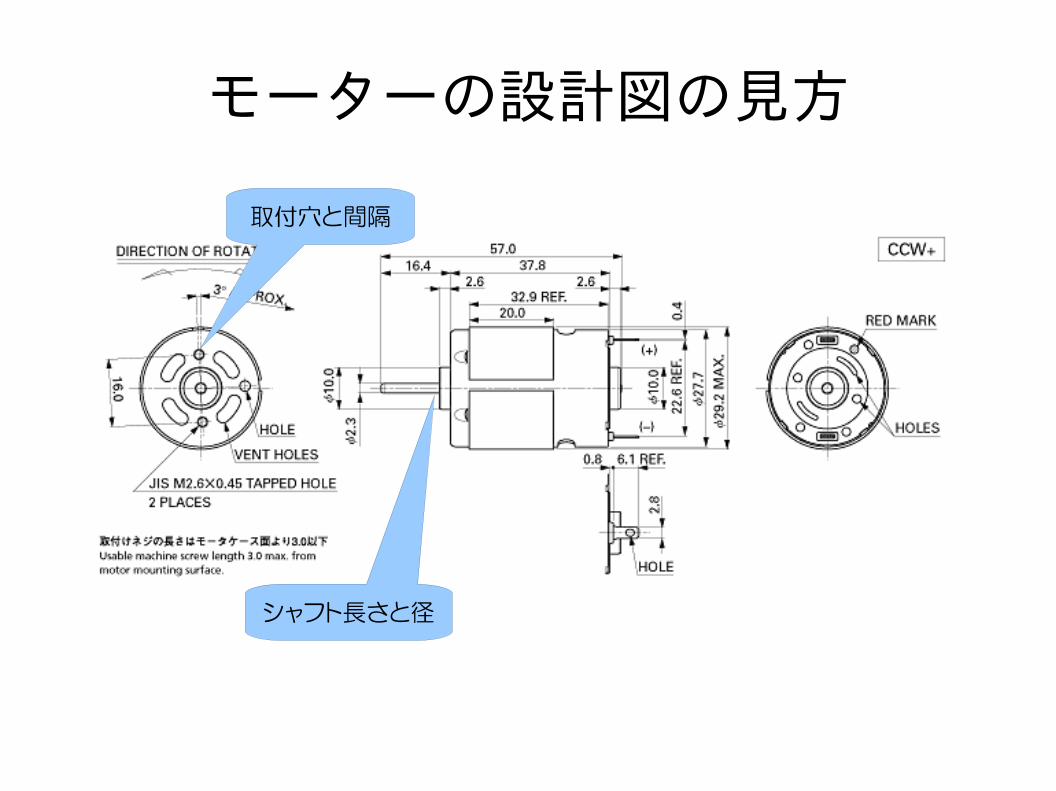
モーターの設計図の見方
取付穴と間隔
シャフト長さと径

ハウジング
ケース界磁(ステータ)
取付穴
軸受け
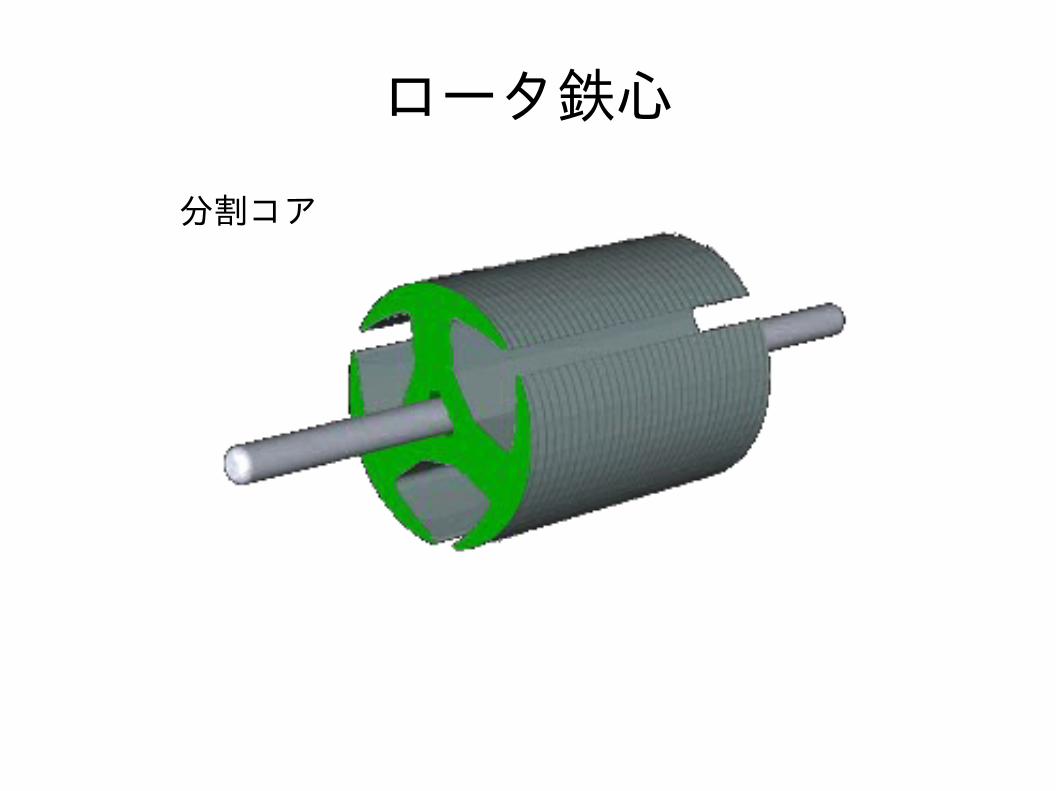
分割コア
ロータ鉄心

界磁(ステータ)
界磁
回転子(ロータ)
反発 吸引
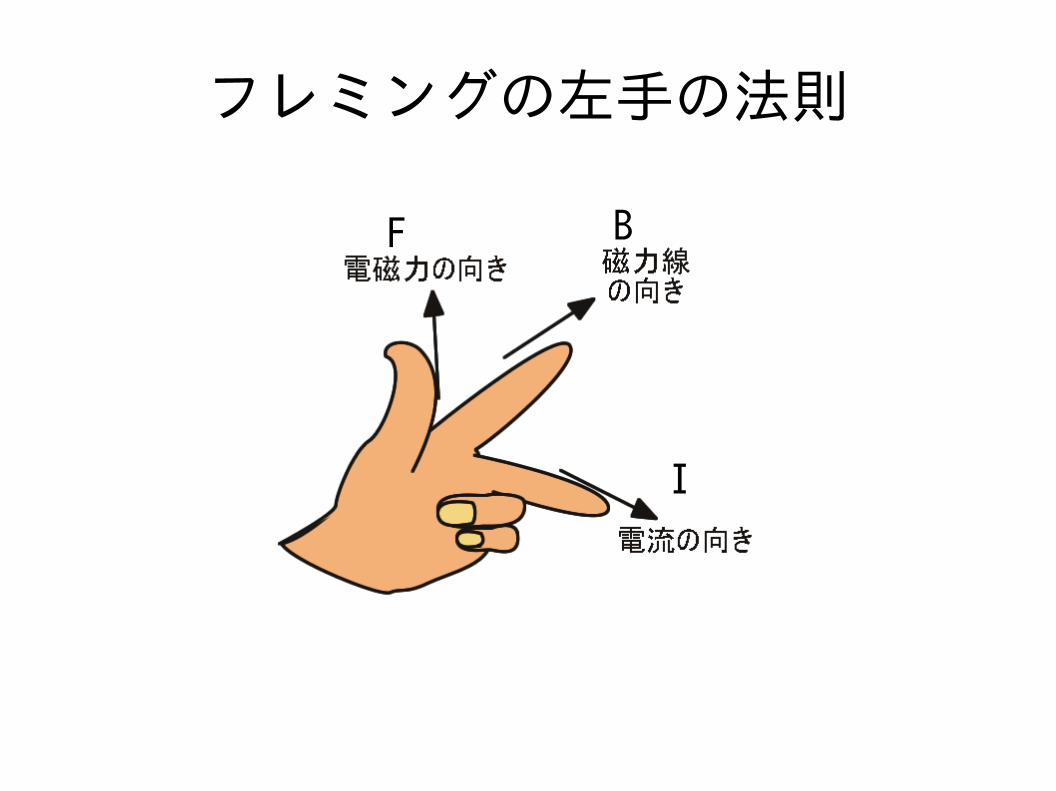
フレミングの左手の法則
F B
I

シャフト
軸受
電流 I 磁界B
力 F
DCモータの磁界と回転方向
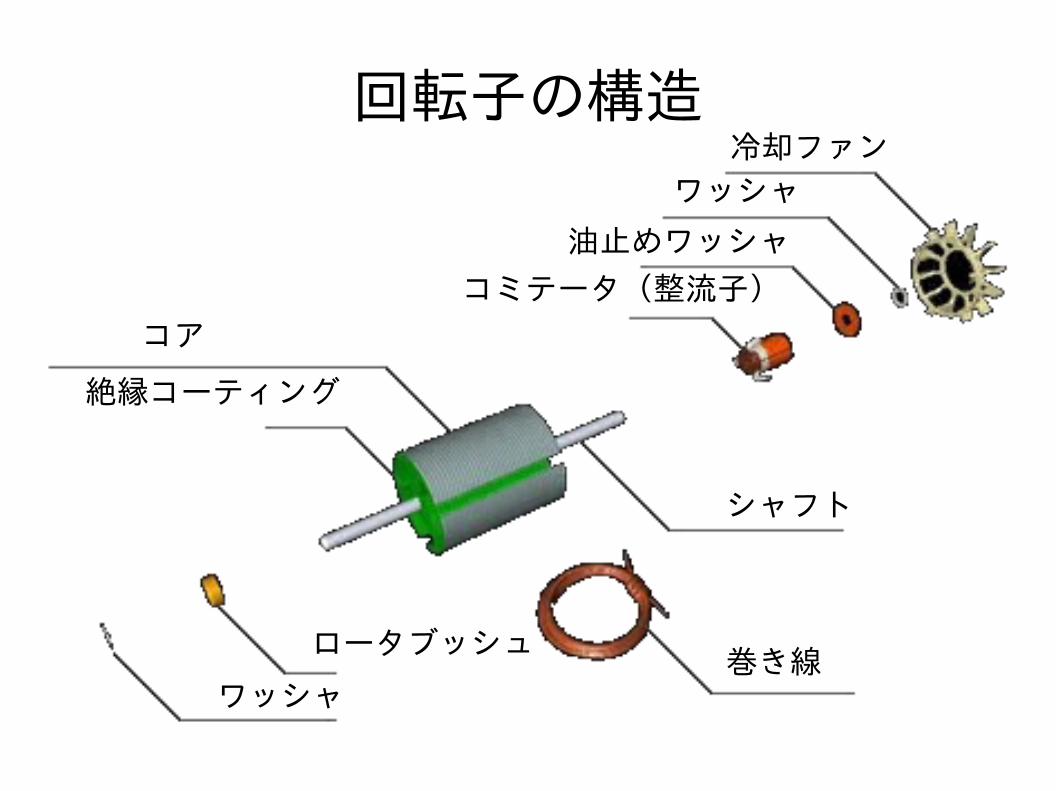
冷却ファン
ワッシャ
油止めワッシャ
コミテータ(整流子)
コア
絶縁コーティング
ロータブッシュ巻き線
シャフト
ワッシャ
回転子の構造

カーボンブラシ
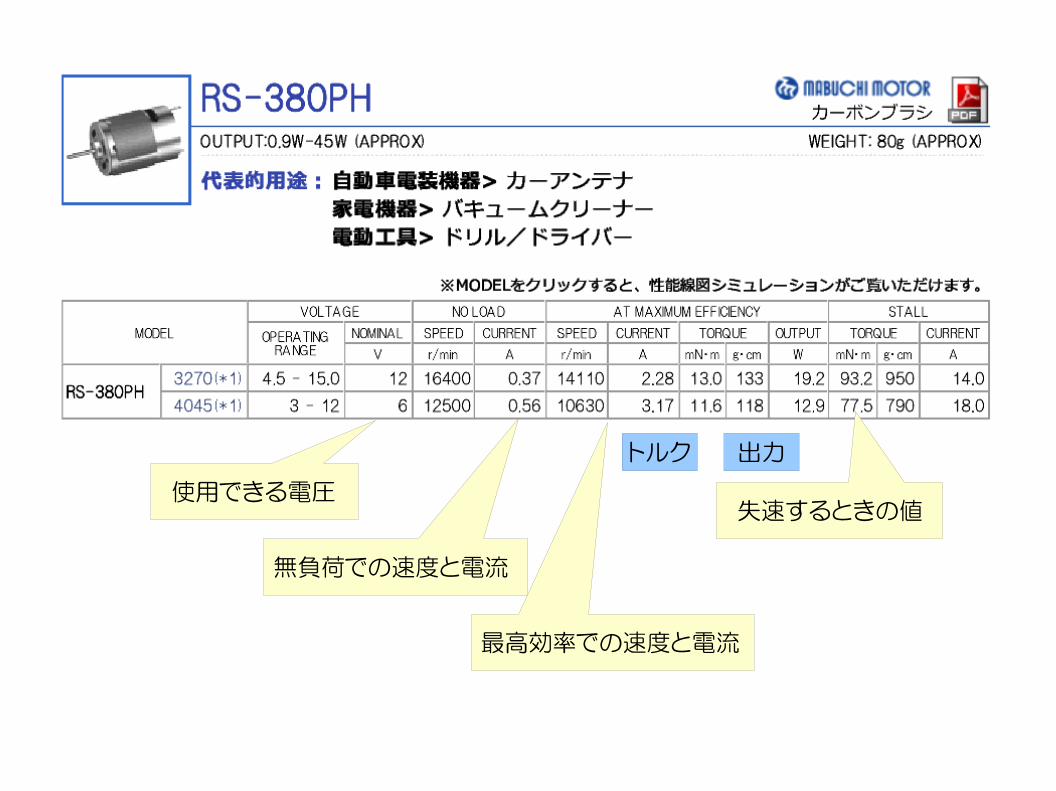
使用できる電圧
無負荷での速度と電流
最高効率での速度と電流
失速するときの値
トルク 出力
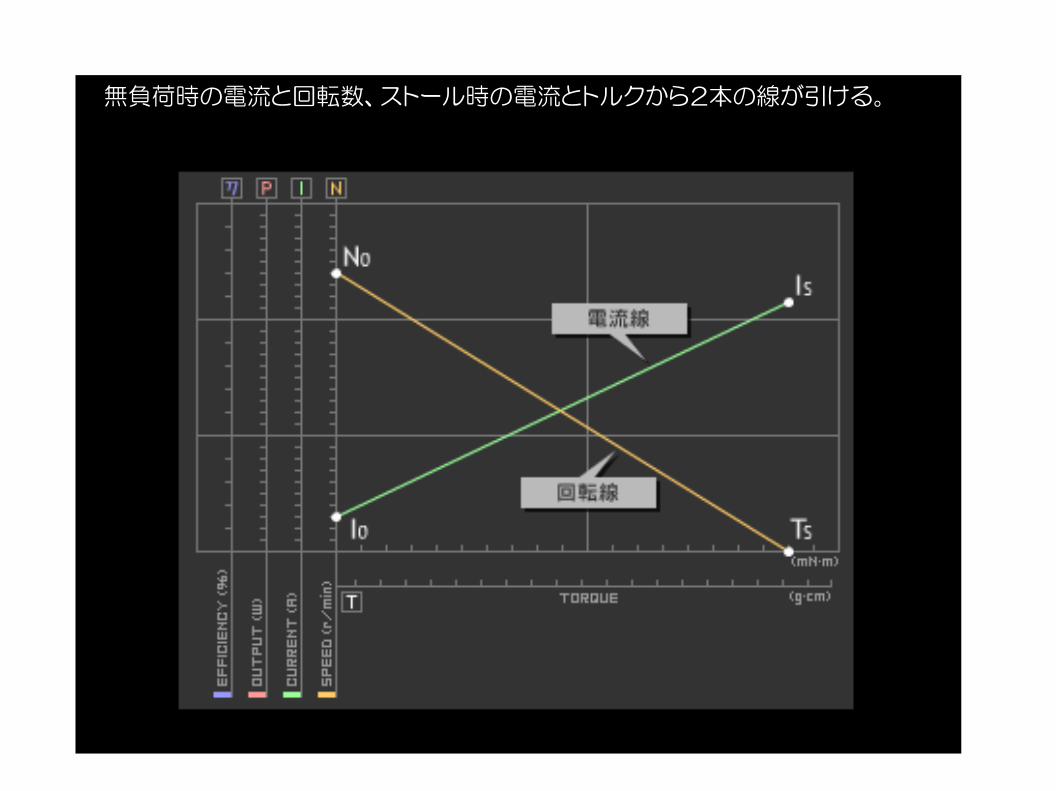
無負荷時の電流と回転数、ストール時の電流とトルクから2本の線が引ける。
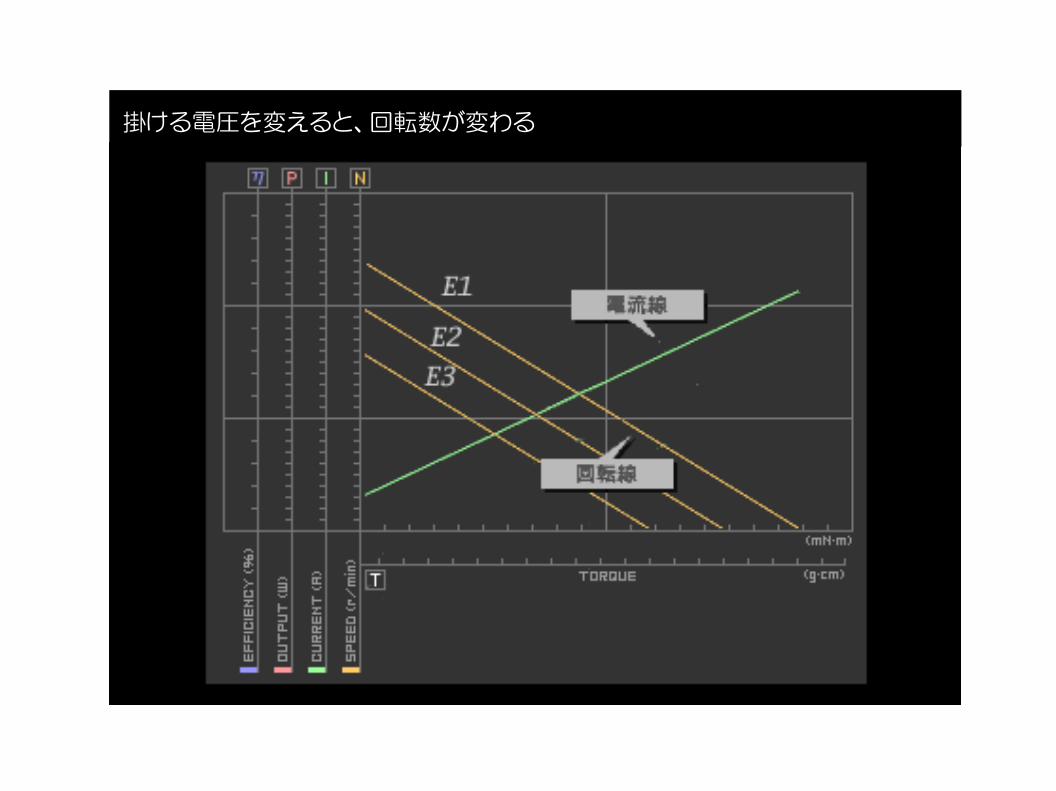
掛ける電圧を変えると、回転数が変わる

半径Rの円周長さ
半径Rに掛る力一秒間の回転数
一秒間に走る円周距離
回転のエネルギ
FN
トルクT = FR
力 x 距離 回転数 x トルク
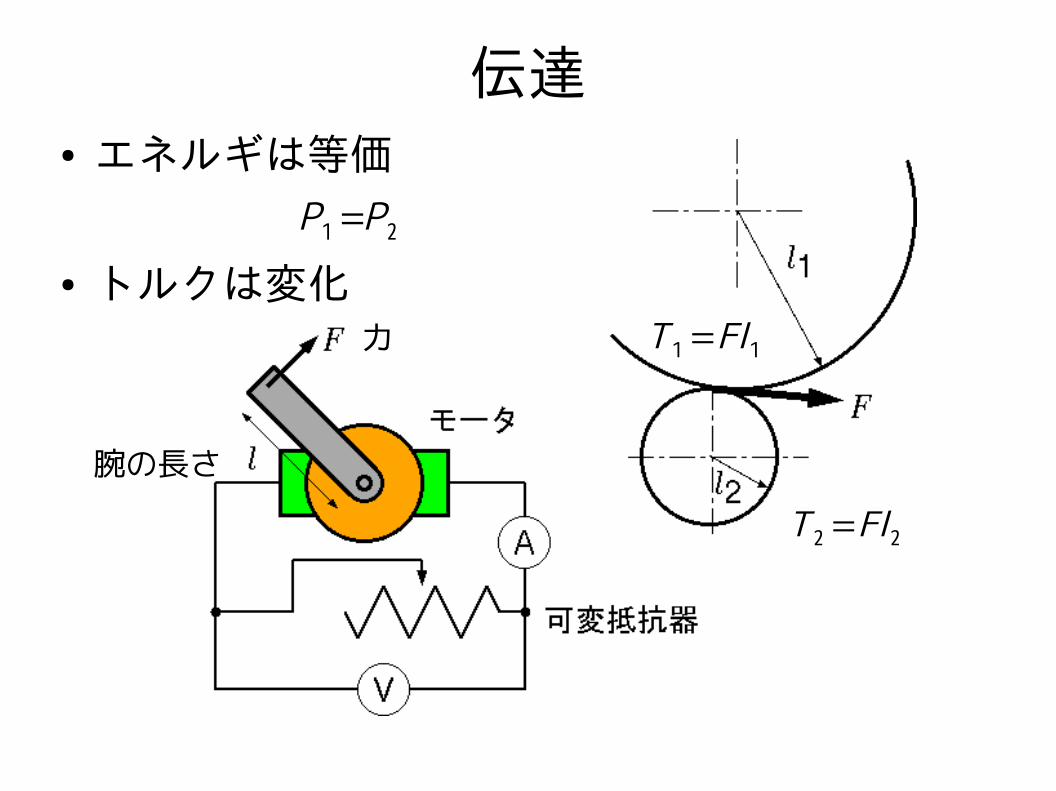
力
腕の長さ
T2 =Fl2
T1 =Fl1
伝達● エネルギは等価
● トルクは変化
P1 =P2
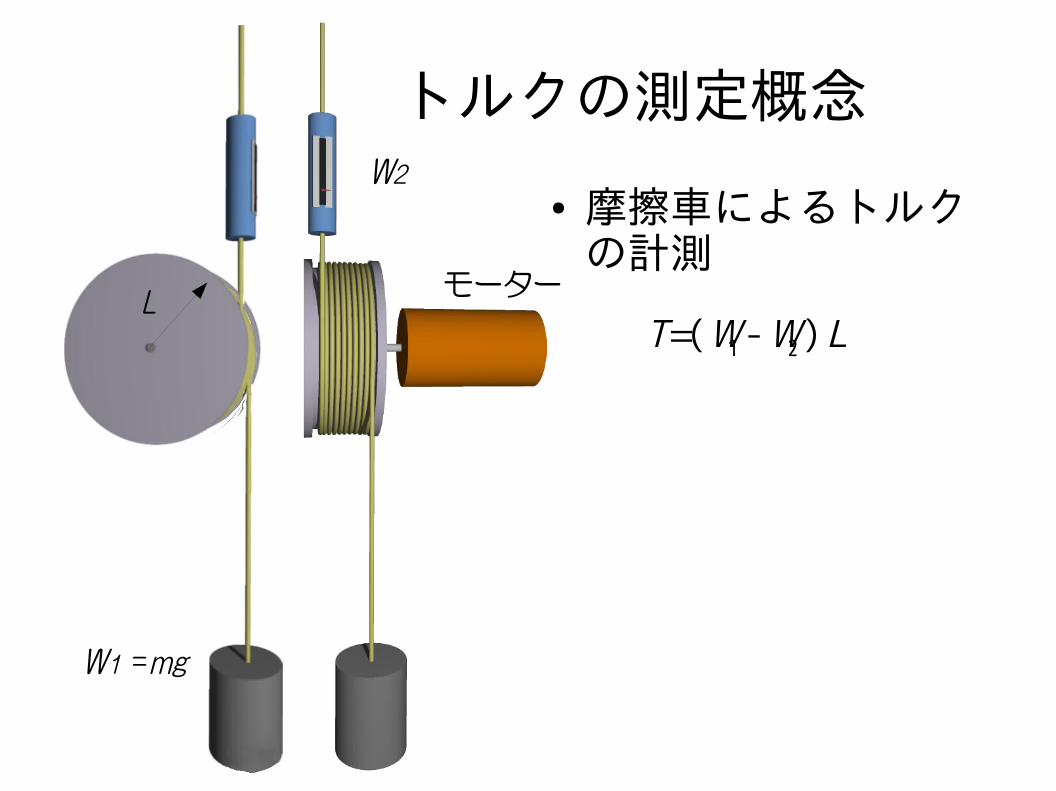
トルクの測定概念
L
W1 =mg
W2
モーター
● 摩擦車によるトルクの計測
T=(W1 - W2 ) L
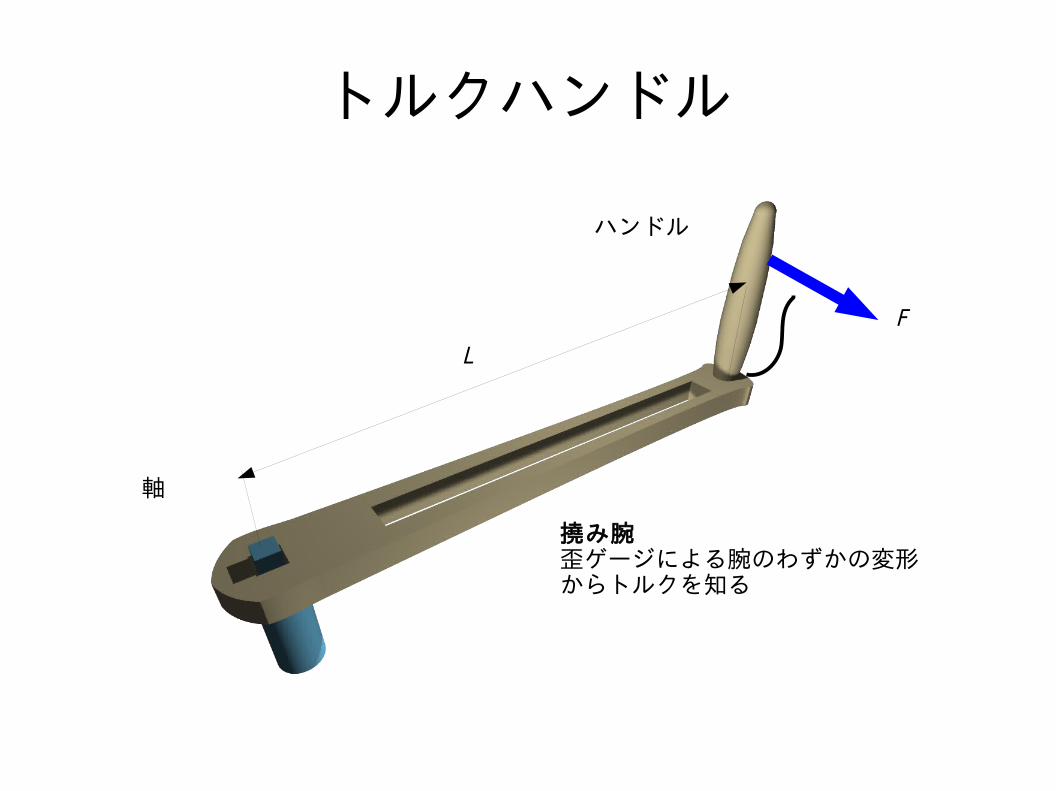
トルクハンドル
ハンドル
撓み腕歪ゲージによる腕のわずかの変形からトルクを知る
軸
L
F

手入力
効率
P :エンジン出力 W
N :回転数 r/s
T :トルク N m
E :電圧 V
I:電流 A
発電出力
評価の方法
● N を変えて、ηの変化と、出力の大きさを競う
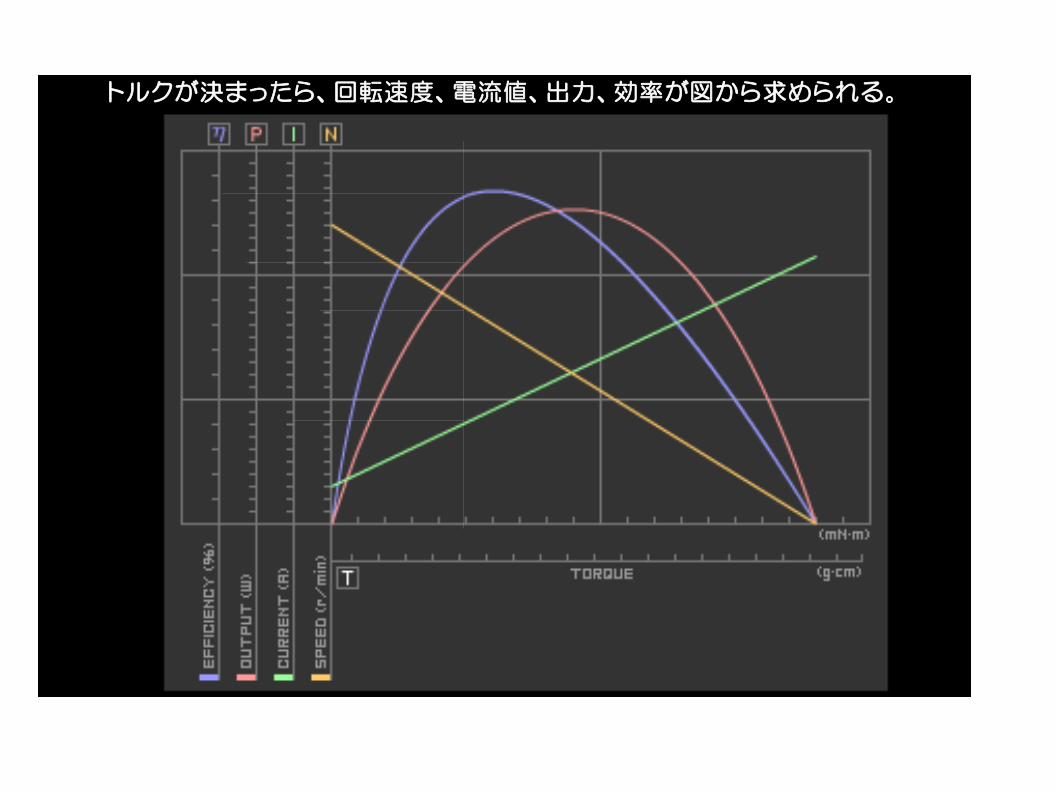
トルクが決まったら、回転速度、電流値、出力、効率が図から求められる。
発電機(モータ)の設置上の注意
● 軸が細い(3mmφ)
● 定格回転数を腕力だけで回すことができない
● 人力でのトルクを計算して、発電機にかかるト
ルクを求め、それがどの程度か知る
● 過剰な増速比は、摩擦のトルクも増幅する
● 回転慣性が大きくなるので、回せなくなる
Recommended

















