3D photography
Marc Pollefeys
Fall 2008
http://www.inf.ethz.ch/personal/pomarc/courses/3dphoto/
3D Photography
• Obtaining 3D shape (and appearance) of real-world objects

Motivation
• Applications in many different areas
• A few examples …
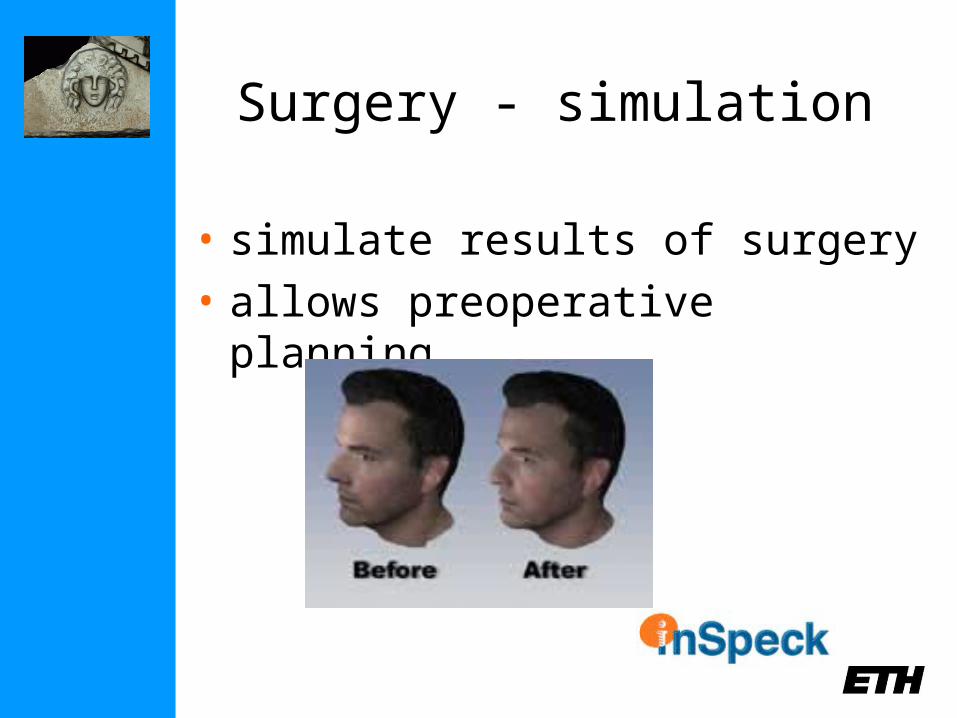
Surgery - simulation
• simulate results of surgery• allows preoperative planning

Surgery - teaching
Capture models of surgery for interactive learning

Clothing
• Scan a person, custom-fit clothing

Forensics
• Crime scene recording and analysis
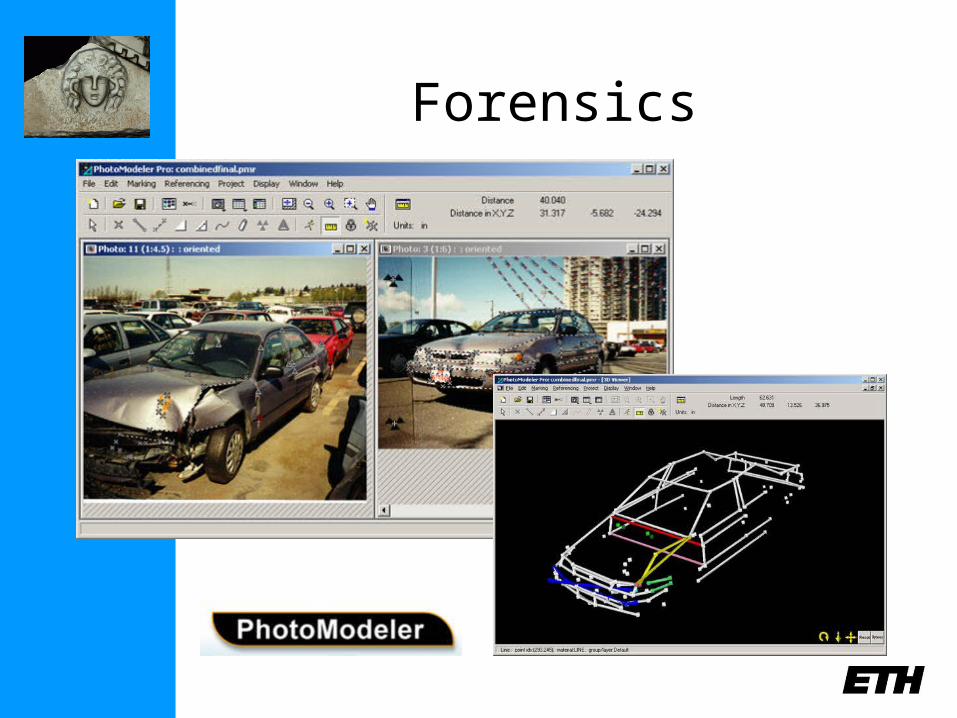
Forensics

3D urban modeling
UNC/UKY UrbanScape project
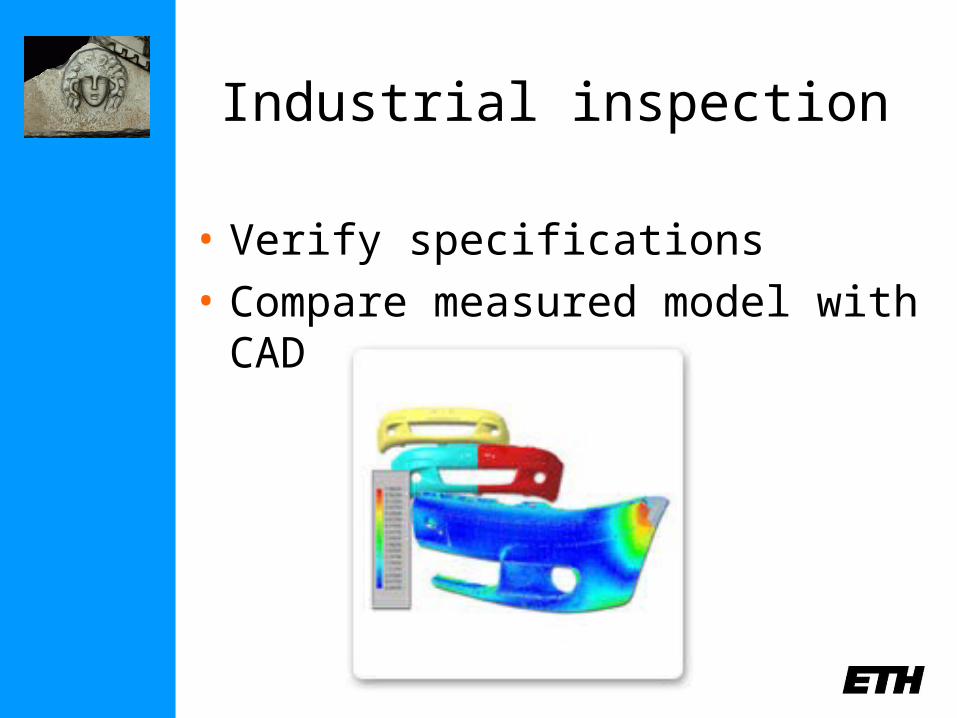
Industrial inspection
• Verify specifications• Compare measured model with
CAD

Scanning industrial sites
as-build 3D model of off-shore oil platform

Robot navigation
small tethered rover
pan/tilt stereo head
ESA projectour task: Calibration + Terrain modelling + Visualization

Architecture
SurveyStability analysisPlan renovations

Architecture
SurveyStability analysisPlan renovations

Cultural heritageVirtual Monticello
Allow virtual visits

Cultural heritage
Stanford’s Digital Michelangelo
Digital archiveArt historic studies

Archaeology
accuracy ~1/500 from DV video (i.e. 140kb jpegs
576x720)

Record different excavation layers
Archaeology
Generate & verify construction hypothesis
Layer 1 Layer 2
Generate 4D excavation record
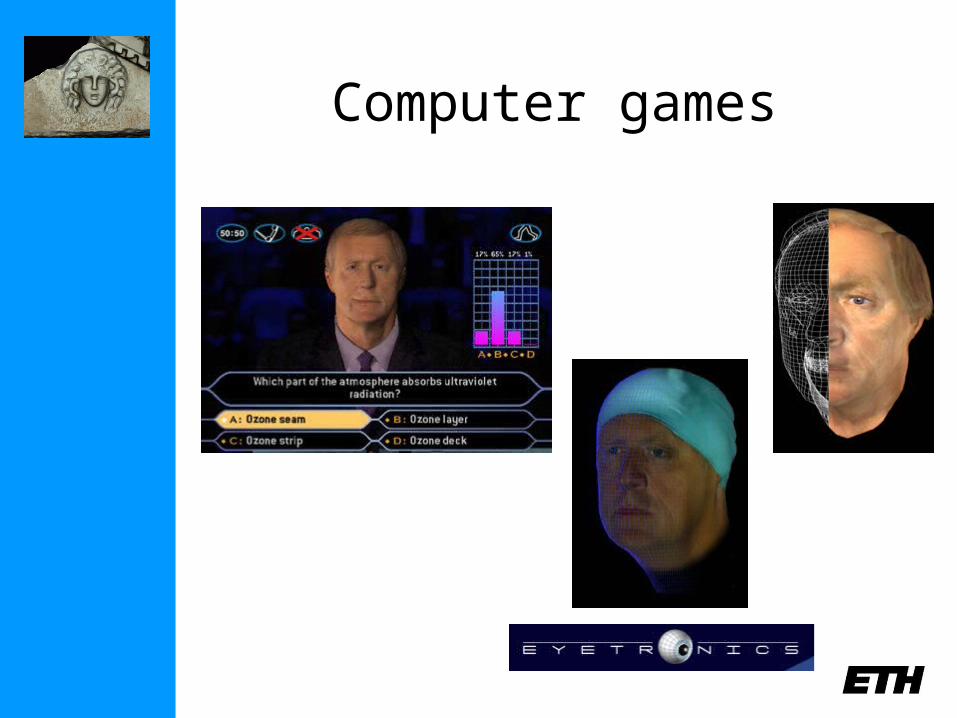
Computer games
Course objectives
• To understand the concepts that allow to recover 3D shape from images
• Explore the state of the art in 3D photography
• Implement a 3D photography system/algorithm

Material
Slides and more
http://www.inf.ethz.ch/personal/pomarc/courses/3dphoto/
Also check out on-line “shape-from-video” tutorial:http://www.cs.unc.edu/~marc/tutorial.pdfhttp://www.cs.unc.edu/~marc/tutorial/
Other interesting stuff:
• Book by Hartley & Zisserman, Multiple View Geometry
• Peter Allen’s 3D photography class webpage http://www1.cs.columbia.edu/~allen/F07/schedule.html

Learning approach
• Lectures: • cover main 3D photography concepts and
approaches.• Exercice sessions:
• Assignments (1st half semester) • Paper presentations and project updates (2nd
half semester) • 3D photography project:
• Choose topic, define scope (1st half semster)• Implement algorithm/system (2nd half semester)
Grade distribution
• Assignments & paper presentation: 50%• Course project: 50%

Content
• camera model and calibration• single-view metrology• triangulation• epipolar geometry, stereo and
rectification• structured-light, active techniques• feature tracking and matching• structure-from-motion• shape-from-silhouettes• space-carving• …

3D photography course schedule(tentative)
Lecture Exercise
Sept 17 Introduction -
Sept 24 Geometry & Camera model Camera calibration
Oct. 1 Single View Metrology Measuring in images
Oct. 8 Feature Tracking/matching(Jan-Michael Frahm?)
Correspondence computation
Oct. 15 Epipolar Geometry(David Gallup?)
F-matrix computation
Oct. 22 Shape-from-Silhouettes Visual-hull computation
Oct. 29 Stereo matching Project proposals
Nov. 5 Structured light and active range sensing
(TBD)
Papers
Nov. 12 Structure from motion Papers
Nov. 19 Multi-view geometry and self-calibration
Papers
Nov. 26 Shape-from-X Papers
Dec. 3 3D modeling and registration Papers
Dec. 10 Appearance modeling and image-based rendering
(TBD)
Papers
Dec. 17 Final project presentations

Fast Forward!
• Quick overview of what is coming…
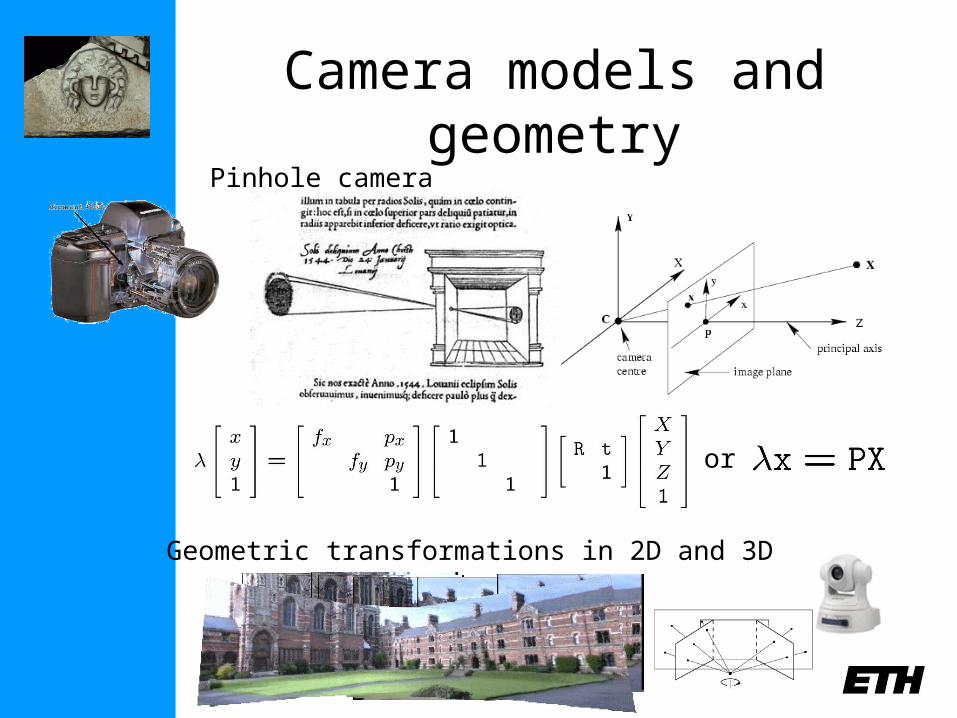
Camera models and geometry
Pinhole camera
Geometric transformations in 2D and 3D
or
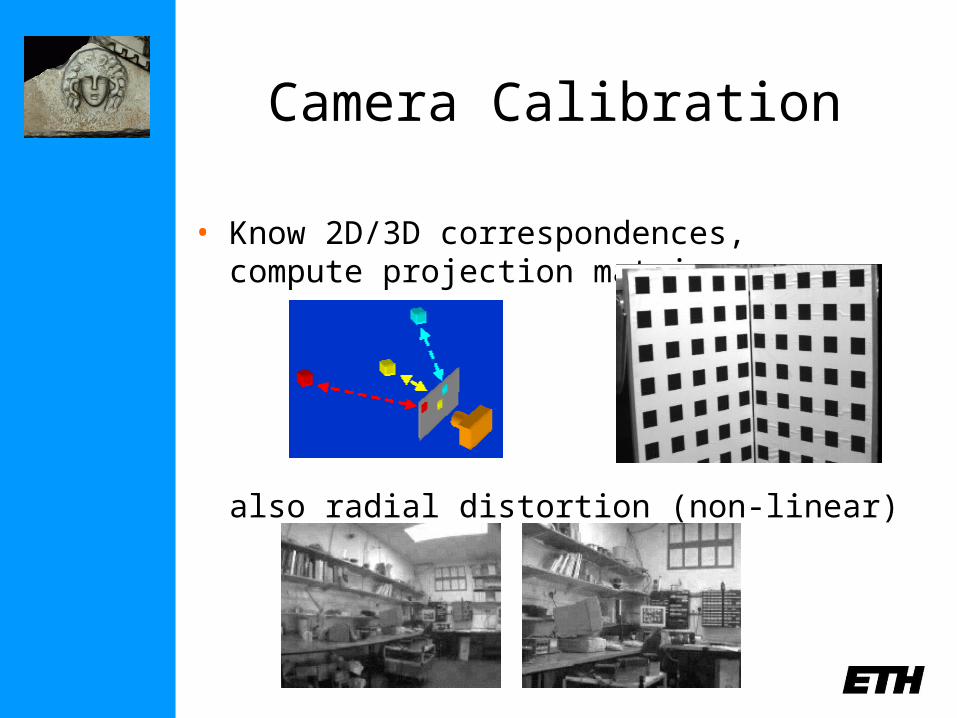
Camera Calibration
• Know 2D/3D correspondences, compute projection matrix
also radial distortion (non-linear)

Single View Metrology

Single View Metrology
Antonio Criminisi

Feature tracking and matching
Harris corners, KLT features, SIFT featureskey concepts: invariance of extraction, descriptors to viewpoint, exposure and illumination changes

l2
3D from images
C1m1 M?
L1
m2
L2
M
C2
Triangulation
- calibration
- correspondences
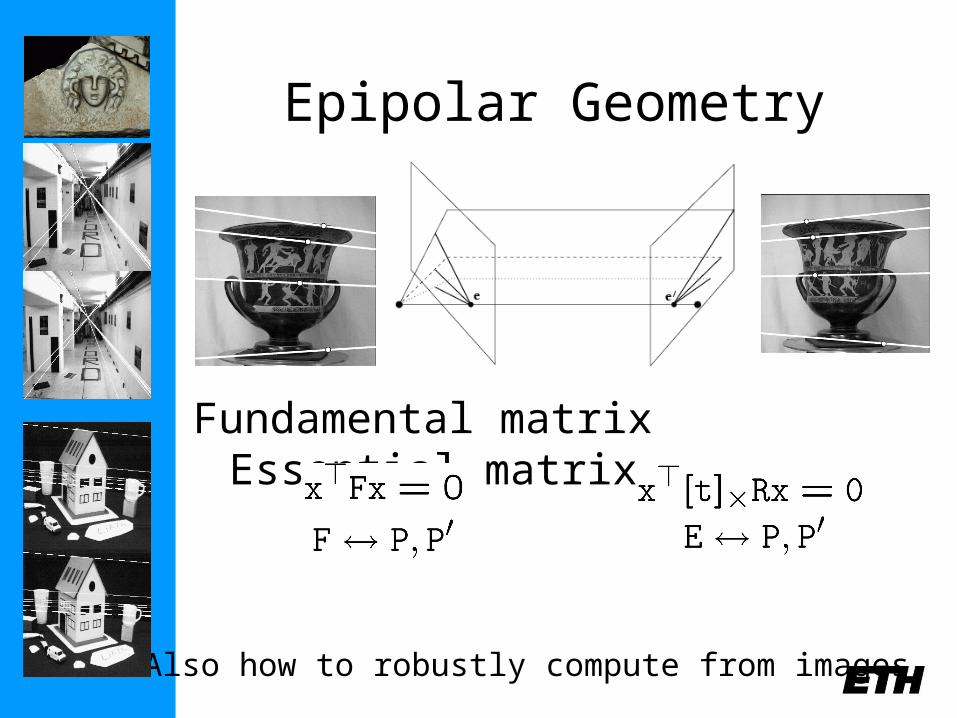
Epipolar Geometry
Fundamental matrix Essential matrix
Also how to robustly compute from images

Stereo and rectificationWarp images to simplify epipolar geometry
Compute correspondences for all pixels

Structured-light
• Projector = camera• Use specific patterns to obtain
correspondences
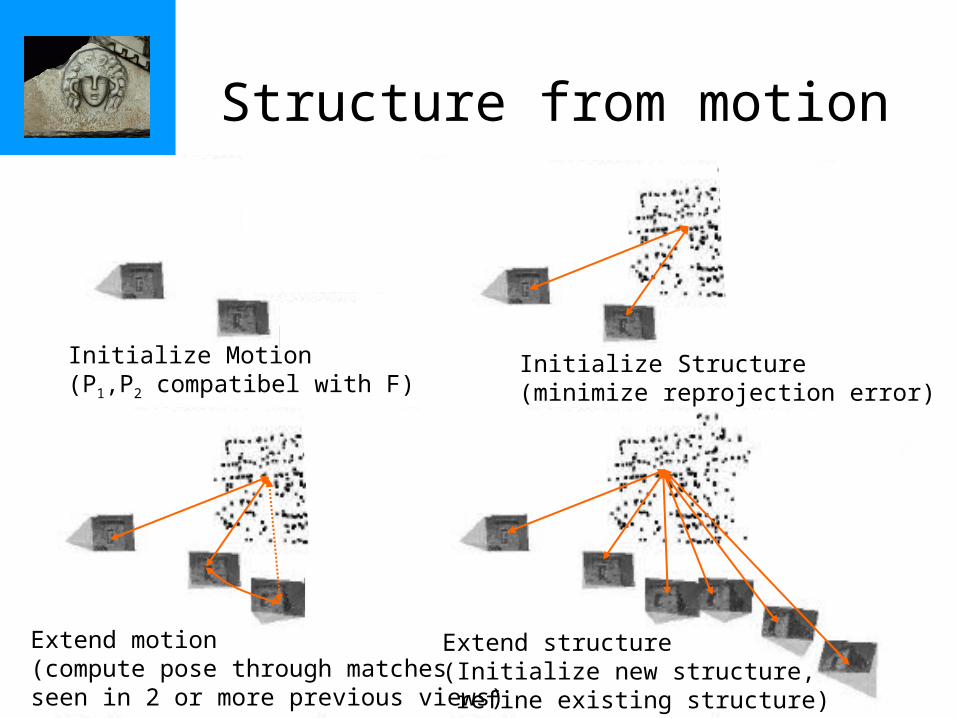
Initialize Motion (P1,P2 compatibel with F)
Initialize Structure (minimize reprojection error)
Extend motion(compute pose through matches seen in 2 or more previous views)
Extend structure(Initialize new structure, refine existing structure)
Structure from motion
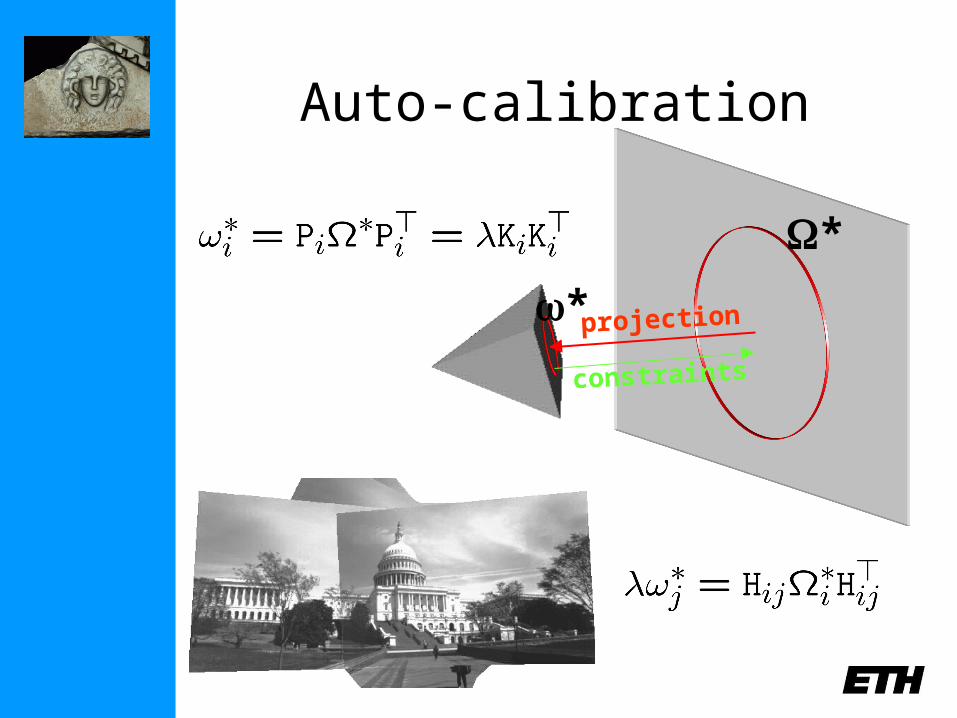
*
*
projection
constraints
Auto-calibration

Shape-from-Silhouette

Space-carving
Only keep photo-consistent voxels
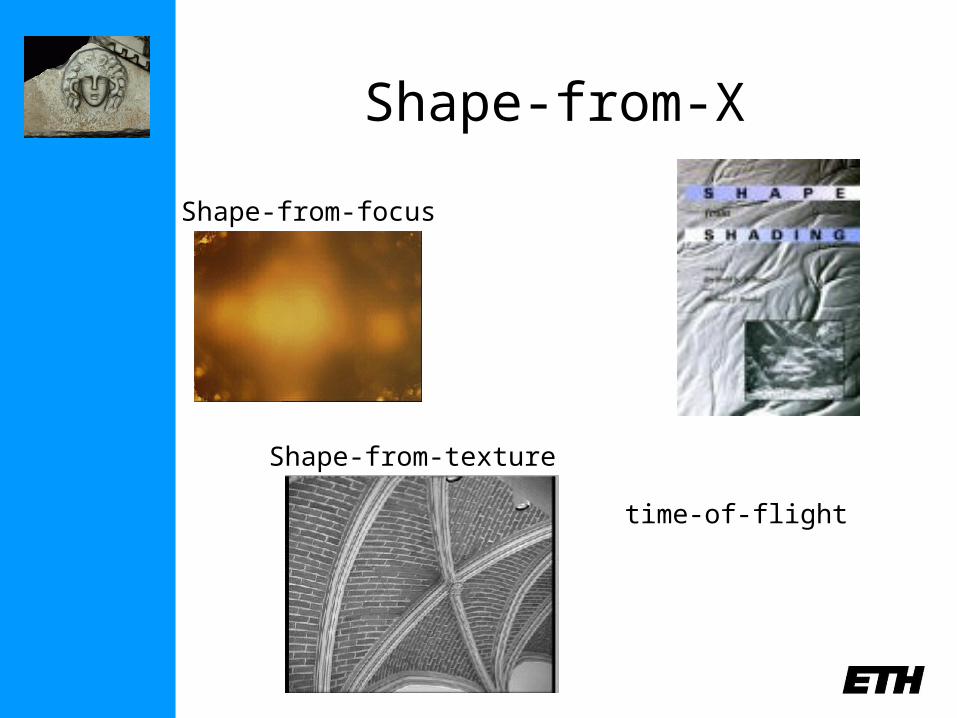
Shape-from-X
Shape-from-focus
Shape-from-texture
time-of-flight
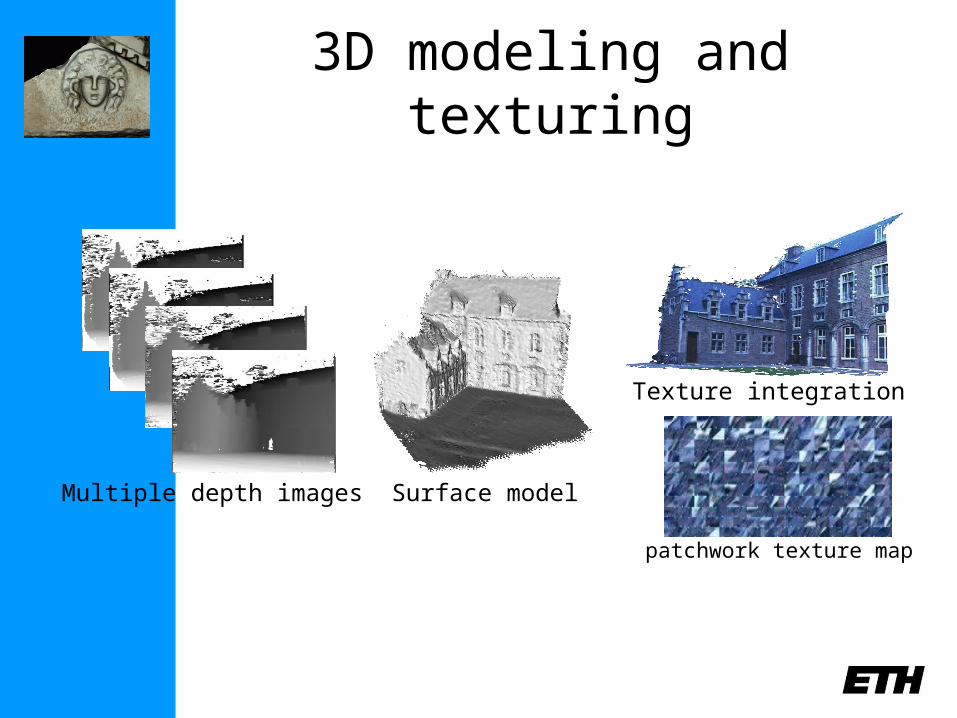
3D modeling and texturing
Multiple depth images Surface model
Texture integration
patchwork texture map

Papers and discussion
• Will cover recent state of the art
Each student will present a paper, discussion
Select paper related to project

Course project: Build your own 3D scanner!
Example: Bouguet ICCV’98
Students can work in group or alone

3D photography course team
Marc PollefeysCAB [email protected]. 044 63 23105
David GallupCAB [email protected]. 044 23061
Recommended

















