
1
GSA Data Repository 2017039 1
Mantle earthquakes, crustal structure and gravitational 2
instability beneath western North Island, New Zealand 3
Jesse-Lee Dimech*, Tim Stern, and Simon Lamb 4
SGEES and Institute of Geophysics, Victoria University of Wellington, Wellington, New Zealand 5
*Current address: NASA Marshall Space Flight Center (USRA), Huntsville, Alabama, USA 6
7
Appendix A – Additional profiles through the TR Line earthquake hypocenters 8
This section provides four north-south profiles through the 710 hypocenters in this study (Figure 9
DR1). Closer to Mt. Ruapehu, the hypocenters form two distinct clusters, one in the crust and 10
another in the upper-mantle. Further from Mt. Ruapehu, the hypocenters tend to cluster only in 11
the mantle with only the occasional hypocenter in the crust. The shallower, clustered 12
hypocenters near Mt. Ruapehu are interpreted to be related to volcanic processes, while the 13
deeper, diffuse hypocenters further away are interpreted to be related to a Rayleigh–Taylor-type 14
instability in the mantle. 15
16 17 18 19 20 Figure DR1: Four north-south profiles containing a 20 km-wide swath of earthquakes each. 21 Profile 1 is furthest from Mt. Ruapehu; profile 4 is the closest. Blue stars represent “best-fit” 22 hypocenter location, fine red points relate to the uncertainty probability density function for each 23 earthquake. Green and yellow triangles represent seismic stations from Dimech (2016) and 24 GeoNet (http://www.geonet.org.nz) respectively. 25

2
26

3
Appendix B – Focal mechanisms and moment tensors 27
In preparation for this study focal mechanisms were calculated from a subset of TR Line 28
earthquakes using the probabilistic (Bayesian) technique of Walsh et al. (2009). Only 29
earthquakes with 10+ P-wave first motions (153 out of 710 events) were used to calculate focal 30
mechanisms. 31
In the method of Walsh et al. (2009), uncertainty in focal mechanism P and T axis is 32
represented as a Posterior Density Function (PDF), which is approximated by a scalar Matrix-33
Fisher distribution. A standard deviation representing the polar uncertainty for each focal 34
mechanism is calculated from the Matrix-Fisher scalar concentration parameter, which ranges 35
from 18–33° with a median value of 28°. This standard deviation value forms the basis of the 36
uncertainties in strain directions from Kostrov summation (Appendix C). 37
The distribution of TR Line focal mechanisms, as well as example focal mechanism 38
“beach balls” from the dataset, are shown in Figure DR2. Here, the TR Line focal mechanisms 39
are essentially a mixture of strike-slip and normal faulting. The shallow earthquakes have 40
relatively even proportions of normal/strike-slip, whereas the deeper earthquakes have a greater 41
proportion of strike-slip over normal (Table A1). 42
Prior to Kostrov summation, focal mechanisms were converted to earthquake moment 43
tensors using the approach of Aki and Richards (1980). The conversion from focal mechanisms 44
to moment tensors also requires the seismic moment (M0) for each earthquake. To determine 45
M0, we start with local earthquake magnitudes (ML) from the GeoNet Rapid earthquake analysis 46
system (Olivieri and Clinton, 2012) which detected all 153 focal mechanism events. First, the 47
local earthquake magnitudes were converted to seismic moment magnitudes using the linear 48

4
relationship Mw = (ML=0.73)/0.88 (Ristau, 2009). Second, Mw was converted to M0 using the 49
relationship ⁄ . (Hanks and Kanamori, 1979). 50
Note: A complete catalog of 710 hypocenter coordinates, as well as 153 focal 51
mechanisms, are available in Appendix A and B respectively of Dimech (2016). 52
53
54
55
Figure DR2: Earthquake focal mechanisms at the TR Line. Blue beachballs = shallow 56 earthquakes, red beachballs = deep earthquakes. Hand-selected representative focal mechanisms 57 are enlarged. Black solid lines represent faults from the QMAP fault database (Townsend et al. 58 2008). 59 60 61 Table A1: TR Line focal mechanisms grouped by approximate fault type. “Dominant fault type” 62 refers to the ideal fault a focal mechanism is closest to. It is determined from the rake value, 63 where normal fault = -45° to -135°; reverse fault = 45° to 135°, and strike-slip fault = ±45°. 64 Rake values are those defined in Aki and Richards (1980). 65 66
M t . Tar an ak i M t . Ru ap eh u

5
Dominant fault type All earthquakes Shallow earthquakes Deep earthquakes Strike-slip 81 35 46 Normal 66 35 31 Reverse 6 1 5 Total 153 71 82
67 68 Appendix C – Calculation of confidence intervals for principal axes of strain 69 70 Earthquake data are provided as sets of scalar seismic moment (M0), strike, dip and rake and 71
estimate of the standard deviation of the principal strain axis uncertainty (Arnold and Townend 72
2007). Ninety percent Confidence Intervals (90% CI) are calculated using a Gaussian 73
approximation to the Matrix Fisher distribution with scalar concentration parameter (Walsh et al. 74
2009), as follows: 75
1. The strike, dip, rake and scalar moment are converted into full moment tensors, summed 76
and the principal of strain axes found. 77
2. A set of N random Gaussian perturbations of a set of standard x, y, z axes are produced 78
for each earthquake, using that earthquake’s polar uncertainty. We have found N=4000 to 79
be satisfactory (Figure DR3). 80
3. The perturbed axes are rotated to the principal strain axis coordinate system and used to 81
construct N sets of moment tensors for each earthquake. 82
4. The N sets are summed over the earthquakes and N sets of principal axes produced 83
(points on a unit sphere). 84
5. The 90% CI are calculated as follows: 85
i) First, the 5% extreme points are rejected. This is necessary, as Matrix Fisher 86
distribution points on a sphere is long tailed compared to Gaussian when the 87
scalar concentration parameter is moderate (e.g. 20 degrees). 88

6
ii) A 95% CI is fitted to a plane projection of the remainder, assuming Gaussian 89
statistics. 90
iii) The resulting ellipse is projected back onto unit sphere, giving a 0.95 x 0.95 = 91
0.903 (90%) CI (Figure DR3). Empirical checks using this paper’s data show 92
88-90% of the points are contained within the 90% CI. 93
6. The poles and 90% CI are presented on an equal area (Schmidt) projection. 94
95 Figure DR3: Illustrating step 2 (left) and step 5 iii (right) respectively. Step 2 represents polar 96 uncertainty with a standard deviation = 10 degrees. Step 5 includes 90% confidence interval 97 (black lines) representing the extent of the three principal strain directions. Red, blue and green 98 dots represent maximum compression, extension and intermediate axis respectively. The black 99 dots is the average location of each principal axis. 100 101
Appendix C – Receiver functions 102
Our receiver function CCP stack (Figures 2 and 3) builds on a preliminary stack based on data 103
collected in 2002 and reported in Salmon et al. (2011). In the preliminary stack, receiver 104
functions were calculated at 7 seismic stations which detected 67 distant earthquake events over 105
a 10-month period. In this new study, receiver functions were calculated at 10 additional seismic 106

7
stations which detected 68 distant earthquakes over a 15-month period. When both datasets are 107
considered together, the result is a 2.5x increase in receiver function density which significantly 108
improves the resulting CCP stack (Figure DR5). The following points explain the receiver 109
function analysis process: 110
1. Pre-processing of teleseismic events consisted of demean, detrend, and a high-111
pass (0.02 Hz) filter to remove long wavelength noise. 112
2. The teleseismic events were rotated into the LQT reference frame (assuming a 113
near-surface velocity of 3.5 km/s). 114
3. P-wave (P-to-S converted) receiver functions were calculated using the multitaper 115
cross-correlation method of Park and Levin (2000). Three tapers are used (K = 3) 116
alongside a p value of 2.5 on an 80 second window. These values, defined in the 117
abovementioned paper, are appropriate for crustal-scale investigations down to 118
about 100 km depth. 119
4. Receiver functions with dominant frequencies of 0.5, 1.0 and 1.5 Hz were 120
calculated. The 1 Hz receiver functions were determined to have the best 121
signal/noise performance the clearest Moho image. 122
5. Radial receiver functions (1 Hz dominant period) were geographically binned to 123
produce a pseudo-cross-section of the Taranaki–Ruapehu Line using the Common 124
Conversion Point (CCP) stacking technique (Dueker and Sheehan, 1997, 1998). 125
6. CCP bin spacing was set to 5km, which is finer than the 8 km bin size of Salmon 126
(2011), to reduce the blocky character. Traces in a bin are shared with two 127
adjacent bins which helps smooth out random noise. Extra frequency filtering 128

8
(0.2–1.5 Hz corner frequencies) was applied to remove residual high and low 129
frequency noise around the dominant frequency. 130
7. Receiver functions are mapped along their raypaths before stacking using the 1D 131
New Zealand Standard (NZST) P Velocity model (Maunder 2002). This is the 132
same velocity model used for earthquake locations. S velocities are defined by a 133
simple P/S ratio of 1.71 which is consistent with global averages for orogenic 134
belts such as New Zealand (Zandt and Ammon, 1995). This value is close to the 135
value determined by Salmon (2008) for the crust sampled by the TRAP array 136
across the Taranaki–Ruapehu Line. No post-stack migration was applied. The 137
uncertainty in Moho depths is expected to be low (in the order of a few 138
kilometers), as the interpreted Ps Moho conversion closely agrees with active-139
source seismic refraction experiments from the northwest North Island at the 140
northern end of the profile (~25 km-deep Moho in Stern et al. 1987) and the 141
Tararua Ranges at the southern end of the profile (~35 km-deep Moho in Garrick 142
1968). For comparison, Salmon et al. (2011) report a formal uncertainty on the 143
Moho of 1.5 km based on H-Vp/Vs stacking results. Our uncertainty would be 144
equal or less as our stack contains ~2.5 times more data including the Salmon 145
events. 146
147
8. A static correction was applied to receiver functions from each seismic station. 148
This correction was intended to test the effect of both sediment thickness and 149
station elevation changes on the resulting receiver function stack. An expected 150
delay time was calculated for the sediment layer using a Vp of 3.4 km/s and 151

9
Vp/Vs of 1.85. These values are approximations of the Wanganui Basin sediment 152
layer based on the work of Watson and Allen (1964) and Eberhart-Phillips et al. 153
(2005). The difference between this delay time and the velocity model above 154
gives the sediment time correction ∆ . 155
Similarly, the elevation time correction is given by the time taken to travel 156
through a certain thickness of basin sediments above sea level 157
∆ . Here, and are the P-wave velocities of the 158
sediment and crustal layers respectively, and and are the elevation of the 159
seismometer and the thickness of the sediments beneath the seismometer 160
respectively. These corrections were applied before the CCP stack was created. 161
The sediment thickness correction is by far the more significant of the two, yet 162
these corrections (and therefore the velocity effect of the Wanganui Basin) have a 163
minimal influence on the resulting image of the CCP stack at Moho scale (less 164
than 3 km difference in depth). 165
9. Synthetic receiver functions using the source-receiver geometry of the observed 166
teleseismic earthquakes were calculated using the finite-difference method of 167
Boyd (2006), and then used to form a CCP stack using the same parameters given 168
above. A simple synthetic two-layer earth model was tested which had various 169
Moho dips up to a vertical step (Figure DR4). The synthetic receiver functions 170
show that for a 1 Hz receiver function dominant frequency, even with trace 171
sharing between adjacent bins, a steep Moho dip can be successfully imaged 172
(Dimech 2016). 173
174

10
Note the absence of strongly-negative (dark blue) energy in the crust above the Moho interface 175
when compared to the observed data (Figure DR4 vs Figure DR5). A negative in the CCP stack 176
is indicative of a drop in seismic wave speeds. A similar such negative is seen in the lower crust 177
of the Sierra Nevada, and that has been attributed to horizontal shearing creating an anisotropic 178
fabric with the slow direction being in the vertical plane (Frassetto et al., 2010; Jones et al., 179
2014). A similar interpretation would be logical here given the horizontal extension inferred 180
from the earthquake focal mechanisms. However, an alternative interpretation of the negative 181
being due to the top surface of a partial melt body cannot be ruled out either, particularly as 182
volcanism over the past 3 my has occurred at the surface. 183
184
185
Figure DR4: Synthetic CCP stacks for different Moho dips (10–90°) at the Taranaki-Ruapehu 186 Line. Receiver functions have a dominant frequency of 1 Hz. Distance from the TR Line (km) 187 is on the x-axis, while depth (km) is on the y-axis. 188

11
189
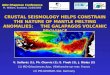
Compared to the Salmon et al. (2011) CCP stack, the revised stack produces a clearer 190
image of the Moho interface, and significantly attenuates multiple energy (Figure DR4). A key 191
observation in the revised stack is that the Moho south of the TR Line appears to be flat rather 192
than dipping. The Moho then weakens towards the southern end of both stacks. Another 193
important observation is that the amplitude of several features in the revised stack has been 194
enhanced or diminished (a few prominent examples are identified in the image.) This is a well-195
known property of seismic stacking with extra data, where primary energy is strengthened and 196
multiple energy is attenuated. 197

12
198
Figure DR5: Common Conversion Point (CCP) stack across the TR Line. Top: Reproduction of 199 Salmon et al. (2011). Bottom: Revised version of above which includes receiver functions from 200 10 additional seismic stations. Fine, white-dotted lines indicate the raypath of individual 201 teleseismic events. Triangles represent seismic station locations. Red = Salmon (2011); green = 202 Dimech (2016) plus PKVZ and TWVZ which are permanent stations from the GeoNet network 203 in the Ruapehu region (http://www.geonet.org.nz). 204 205
206
Moho (Ps)
CrustalLayer
Mostly multipleenergy
Direct Arrival (Pp)
MantleConversion(P2s)
0
10
20
30
40
50
60
70
80
Dep
th (
km)
S N
-60 -40 -20 0 20 40 60Distance from Taranaki–Ruapehu Line (km)
WR
R
SU
N
PA
P
RA
E
ER
U
KA
I
TU
N
Wanganui Basin King Country Basin
Wanganui Basin King Country Basin
Dipping Moho
Moho
CrustalLayer
Reductionin
multiples
P–phasearrival
0
Distance from Taranaki–Ruapehu Line (km)
10
20
30
40
50
60
70
80
Dep
th (
km)
-60 -40 -20 0 20 40 60
NS
WR
R
PA
R
SU
N
PA
P
WTA
HO
KR
AE
SO
WM
OT
PK
VZ
ER
U
KU
R
KA
I
TW
VZ
TU
NF
UN
PE
P
MantleConversion(P2s)
Dipping crustal layer
Flat Moho
Diminished multiple
Enhanced primary
Multiple energy
Primary energy
Diminished (possibly a multiple)
Vanishing Moho
Vanishing Moho

13
Aki, K., and Richards, P., 1980, Quantitative Sesimology: theory and methods, vol. 1., San 207 Francisco, W.H. Freeman and Co. 208
Arnold, R., and Townend, J., 2007, A Bayesian approach to estimating tectonic stress from 209 seismological data: Geophys J Int, v. 170, no. 3, p. 1336-1356. 210
Boyd, O. S., 2006, An efficient Matlab script to calculate heterogeneous anisotropically elastic 211 wave propagation in three dimensions, Computers & Geosciences, vol. 32, no. 2, p. 259-212 264. 213
Dimech, J.-L., 2016, Seismic investigations of the lithosphere in an amagmatic back-arc region: 214 North Island, New Zealand [Ph. D. Thesis]: Wellington, New Zealand, Victoria 215 University of Wellington, 216p. 216
Dueker, K. G., and Sheehan, A. F., 1997, Mantle discontinuity structure from midpoint stacks of 217 converted P to S waves across the Yellowstone hotspot track, Journal of Geophysical 218 Research: Solid Earth (1978-2012), v. 102 no. B4, p. 831308327. 219
Dueker, K. G., and Sheehan, A. F., 1998, Mantle discontinuity structure beneath the Colorado 220 rocky mountains and high plains, Journal of Geophysical Research: Solid Earth (1978-221 2012), v. 103, no. B4, p. 7153-7169. 222
Eberhart-Phillips, D., Reyners, M., Chadwick, M., Chiu, J.-M., 2005, Crustal heterogeneity and 223 subduction processes: 3-D Vp, Vp/Vs and Q in the southern North Island, New Zealand, 224 Geophysical Journal International, v. 162, no. 1, p. 270-288. 225
Garrick R.A., 1968. A reinterpretation of the Wellington crustal refraction profile, N. Z. J. 226 Geology and Geophys., 11, 1280–1294. 227
Hanks, T. C., and Kanamori, H., 1979, A Moment Magnitude Scale: J.Geophys. Res., v. 84, no. 228 B5, p. 2348-2350. 229
Kostrov, V. V., 1974, Seismic moment and energy of earthquakes, and seismic flow of rock: 230 Izvestiya—Academy of Sciences USSR Phys. Solid Earth, English Translation 1,13–21., 231 v. 1, p. 13-21. 232
Maunder, D. E., 2002, New Zealand Seismological Report 2000: Seismological Observatory 233 Bulletin E-183, Tech. rep., Institute of Geological and Nuclear Sciences. 234
Olivieri, M., and Clinton, J., 2012, An almost fair comparison between Earthworm and 235 SeisComp3: Seismological Research Letters, v. 83, no. 4, p. 720-727. 236
Park, J., and Levin, V., 2000, Receiver functions from multiple-taper spectral correlation 237 estimates, Bulletin of the Seismological Society of America, v. 90, no. 6, p. 1507-1520. 238
Ritsu, J., Comparison of magnitude estimates for New Zealand earthquakes: moment magnitude, 239 local magnitude, and teleseismic body-wave magnitude: Bulletin of the Seismological 240 Society of America, v. 99, no. 3, p. 1841-1852. 241
Salmon, M., 2008, Crust and Upper Mantle Inhomogeneities Beneath Western North Island, 242 New Zealand: Evidence from Seismological and Electromagnetic Data [Ph.D. Thesis]: 243 Wellington, New Zealand, Victoria University of Wellington, 183p. 244
Salmon, M., Stern, T., and Savage, M., 2011, A major step in the continental Moho and its 245 geodynamic consequences: the Taranaki-Ruapehu line, New Zealand: Geophys J Int, v. 246 186, p. 22-44. 247
Stern, T. A., E. G. C. Smith, F. J. Davey, and Muirhead K. J., 1987, Crustal and upper mantle 248 structure of the northwestern North Island, New Zealand, from seismic refraction data, 249 Geophysical Journal of the Royal Astronomical Society, v. 91 no. 3, p. 913-936. 250
Townsend, D., Vonk, A., and Kamp, P. J. J., 2008, Geology Map of the Taranaki area: scale 251 1:250,000. Lower Hutt: GNS Science. Institute of Geological & Nuclear Sciences 252

14
1:250,000 geological map 7. 77 p. + 1 folded map. 253 Walsh, D. R., Arnold, R., and Townend, J., 2009, A Bayesian approach to determining and 254
parametrizing earthquake focal mechanisms: Geophys J Int, v. 176, p. 235-255. 255 Watson, J. and Allan, D., 1964, Compilation of seismic results in the Wanganui Basin, Shell, BP 256
and Todd Oil Srevices report EP, 53. 257 Zandt, G., and Ammon, C. J., 1995, Continental crust composition constrained by measurements 258
of crustal Poisson’s ratio, Nature, v. 374, no. 6518, p. 152-154. 259
Recommended












![Crustal and uppermost mantle structure in the central …ciei.colorado.edu/pubs/2013/jgrb50321.pdfVanSchmusetal.[1993]andCannon[1994]attributedthese features to a postrifting compressional](https://img.dokumen.tips/doc/110x75/5af5d0537f8b9a5b1e8e50aa/crustal-and-uppermost-mantle-structure-in-the-central-ciei-1993andcannon1994attributedthese.jpg)



