Az irányítás alapfogalmai
Az Irányítástechnika I. tárgy alapjainak gyors áttekintése
Irányítástechnika II. VI BSc2018. 09. 16.1
Irányítástechnika II. VI BSc Alapfogalmak/2
Irányítás fogalma
• irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány
• irányítás: olyan művelet, amely valamely műszaki folyamatba annak elindítása, fenntartása, tervszerű lefolyásának biztosítása, megváltoztatása, leállítása érdekében beavatkozik
• irányítás történhet
• kézi módon
• automatikus módon

Irányítástechnika célja
• cél:
• az alapjel követése
• zajok, zavarások hatásának kiküszöbölése
• fizikai megvalósíthatóság
• gazdasági és egyéb céloknak megfelelőség
• eszköz:
• hatásvázlat
• szimuláció
• matematikai modellek
Irányítástechnika II. VI BSc Alapfogalmak/3
Irányítástechnika II. VI BSc Alapfogalmak/4
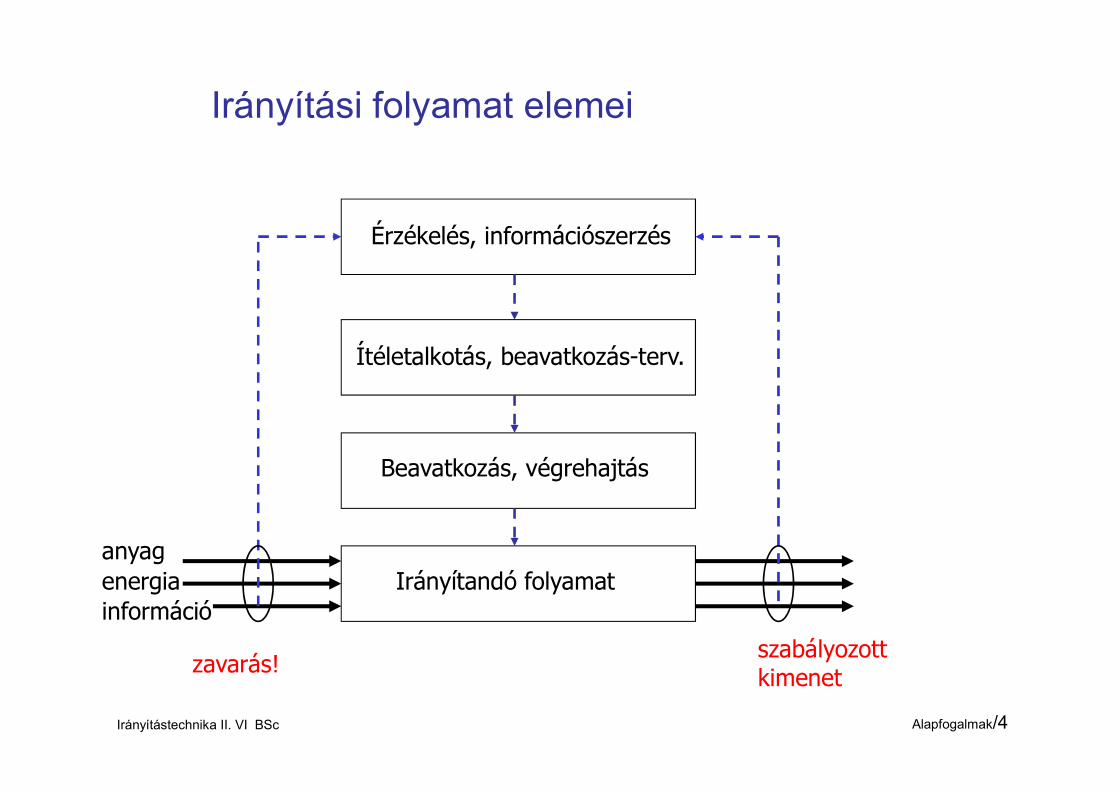
Irányítási folyamat elemei
Irányítandó folyamatanyagenergiainformáció
Érzékelés, információszerzés
Ítéletalkotás, beavatkozás-terv.
Beavatkozás, végrehajtás
zavarás!szabályozott kimenet
Irányítástechnika II. VI BSc Alapfogalmak/5
Irányítási folyamat elemei
• Irányítandó folyamat:
• technológiai rendszer - modellek
• Érzékelés, információszerzés:• érzékelő-, mérőeszközök, távadók, vezetékek
• Ítéletalkotás, beavatkozás-tervezés:
• vezérlők
• szabályozók - modellek
• Beavatkozás, végrehajtás• beavatkozó szervek, szabályozó szelepek

Irányítástechnika II. VI BSc Alapfogalmak/6
Jelek
• Jelhordozó: minden mérhető fizikai/kémiai állapothatározó
• Jellemzők: azok a jelhordozók, amelyek az irányított folyamat állapotát jellemzik vagy befolyásolják
• Jel: valamely állapothatározó minden olyan értéke vagy értékváltozása, amely egy egyértelműen hozzárendelt információ szerzésére, továbbítására vagy tárolására alkalmas
• Hatás: az irányítási lánc elemein végighaladó jelek

Irányítástechnika II. VI BSc Alapfogalmak/7
Jelek osztályozása
• értékkészlet szerint: - folytonos- diszkrét (szakaszos)
• időbeli lefolyás szerint: - folyamatos- diszkrét (szaggatott)
• meghatározottság szerint: - determinisztikus- sztochasztikus
• megjelenési forma szerint: - analóg- digitális

Irányítástechnika II. VI BSc Alapfogalmak/8
Jelek osztályozása
folyamatos mintázottfo
lyto
nos
dis
zkré
t
időbeli lefolyás szerintér
tékk
ész
let s
zeri
nt
t
f(t)
f(t)
t t
f(t)
t
f(t)
t
f(t)

Irányítástechnika II. VI BSc Alapfogalmak/9
Irányítási rendszer részei és leírása
• irányítási rendszer: - irányított rendszer- irányító rendszer
• hatáslánc: irányítási rendszernek az irányítás hatását közvetítő sorozata
• irányítási rendszer szerkezeti részei:
• készülék
• szerv
• elem
• jelvivő vezeték

Irányítási rendszer részei és leírása
• irányítási rendszer leírása:
• szerkezeti vázlat
• működési vázlat
• hatásvázlat
Irányítástechnika II. VI BSc Alapfogalmak/10
Irányítandó folyamat (tartály)
MérőeszközFolyamatirányító
számítógép
Beavatkozó(szelep)
Irányítástechnika II. VI BSc Alapfogalmak/11
Irányítási rendszer részei és leírása
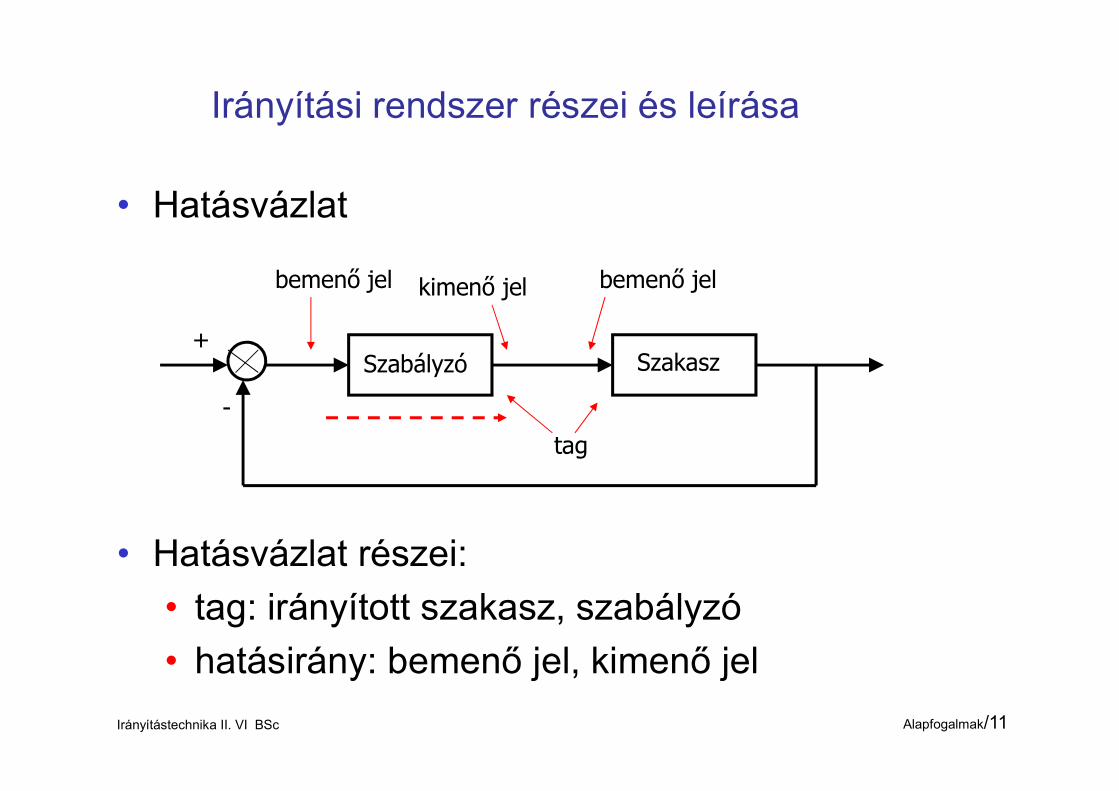
• Hatásvázlat
• Hatásvázlat részei:
• tag: irányított szakasz, szabályzó
• hatásirány: bemenő jel, kimenő jel
-
+Szabályzó Szakasz
kimenő jel bemenő jelbemenő jel
tag

Irányítástechnika II. VI BSc Modellek/12
Bemenet/kimenet modellek
Lineáris, időinvariáns, folytonos idejű bemenet/kimenet (I/O) modell:
ahol u – a bemenő jely – a kimenő jelan,…,a0, bm,…,b0 – paraméterek
ububyayayaya mm
nn
nn 00
11
11

Irányítástechnika II. VI BSc Modellek/13
Bemenet/kimenet modellek
I/O modell jelzői:• lineáris• időinvariáns• folytonos idejű
• y(t0), …, y(n-1)(t0) – kezdeti feltételek• inhomogén• n-ed rendű
• nm – oksági szabály• SISO
ububyayayaya mm
nn
nn 00
11
11

Irányítástechnika II. VI BSc Modellek/14
Lineáris – nemlineáris rendszerek
• Linearitás:
u1(t) y1(t)
u2(t) y2(t)
1, 2R
1·u1(t)+ 2·u2(t) 1·y1(t)+ 2·y2(t)
• a leíró egyenletek nem tartalmazhatják a változók szorzatait vagy hatványait
• elméleti rendszerek
Irányítástechnika II. VI BSc Modellek/15
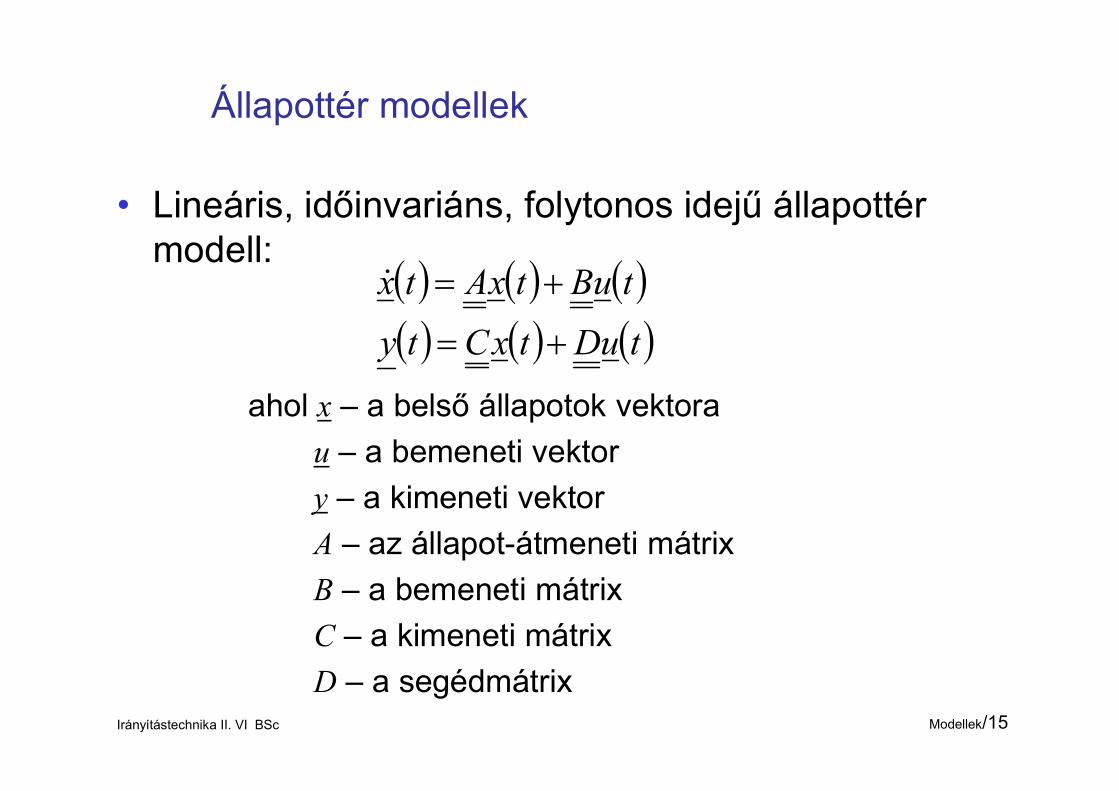
Állapottér modellek
• Lineáris, időinvariáns, folytonos idejű állapottér modell:
ahol x – a belső állapotok vektora
u – a bemeneti vektor
y – a kimeneti vektor
A – az állapot-átmeneti mátrix
B – a bemeneti mátrix
C – a kimeneti mátrix
D – a segédmátrix
tuDtxCty
tuBtxAtx

Irányítástechnika II. VI BSc Modellek/16
Vizsgálójelek
• alkalmazásuk indoka:
• aktív kísérlettervezés lehetősége
• ismeretlen modellű rendszernél a modell típusának meghatározása – struktúra identifikáció
• ismert modellű rendszer esetén a paraméterek meghatározása – paraméter identifikáció
• ellenőrzés
Irányítástechnika II. VI BSc Modellek/17
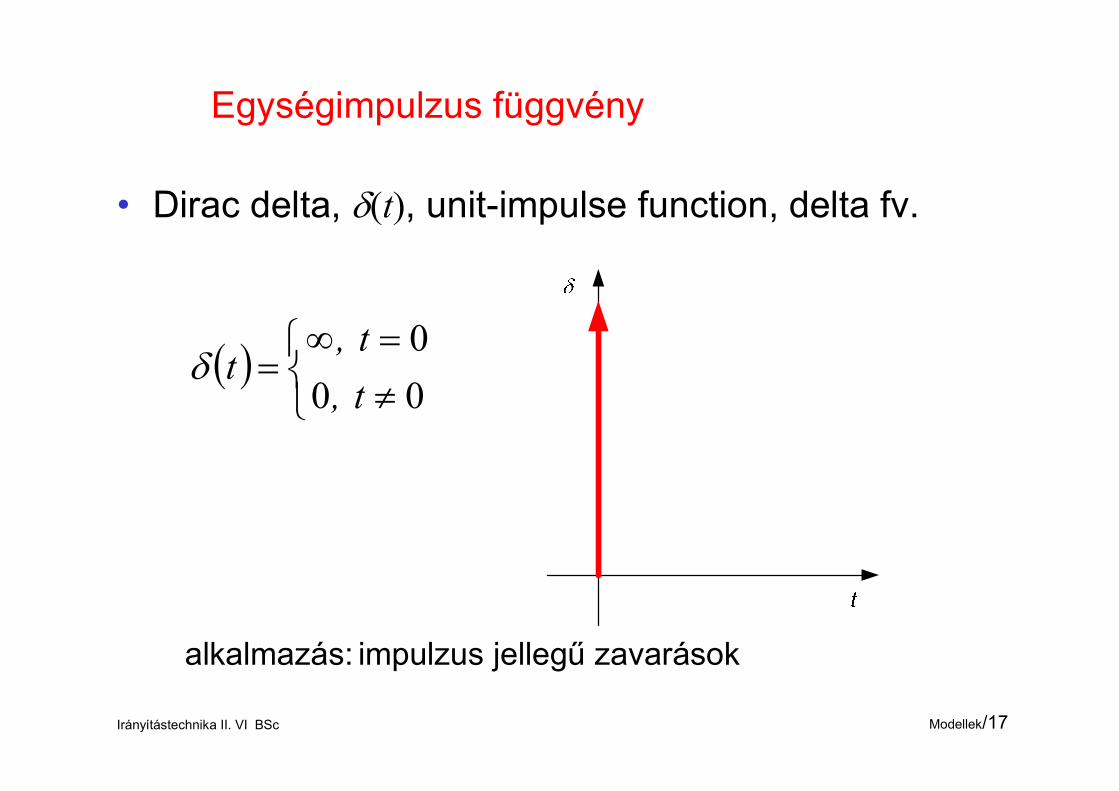
Egységimpulzus függvény
• Dirac delta, (t), unit-impulse function, delta fv.
0 0
0
t,
t,t
alkalmazás: impulzus jellegű zavarások

Irányítástechnika II. VI BSc Modellek/18
Egységugrás függvény
• 1(t), unit step function
0 0
0 11
t,
t,t
alkalmazás: alapjel-váltás, ugrás jellegű zavarások
Irányítástechnika II. VI BSc Modellek/19
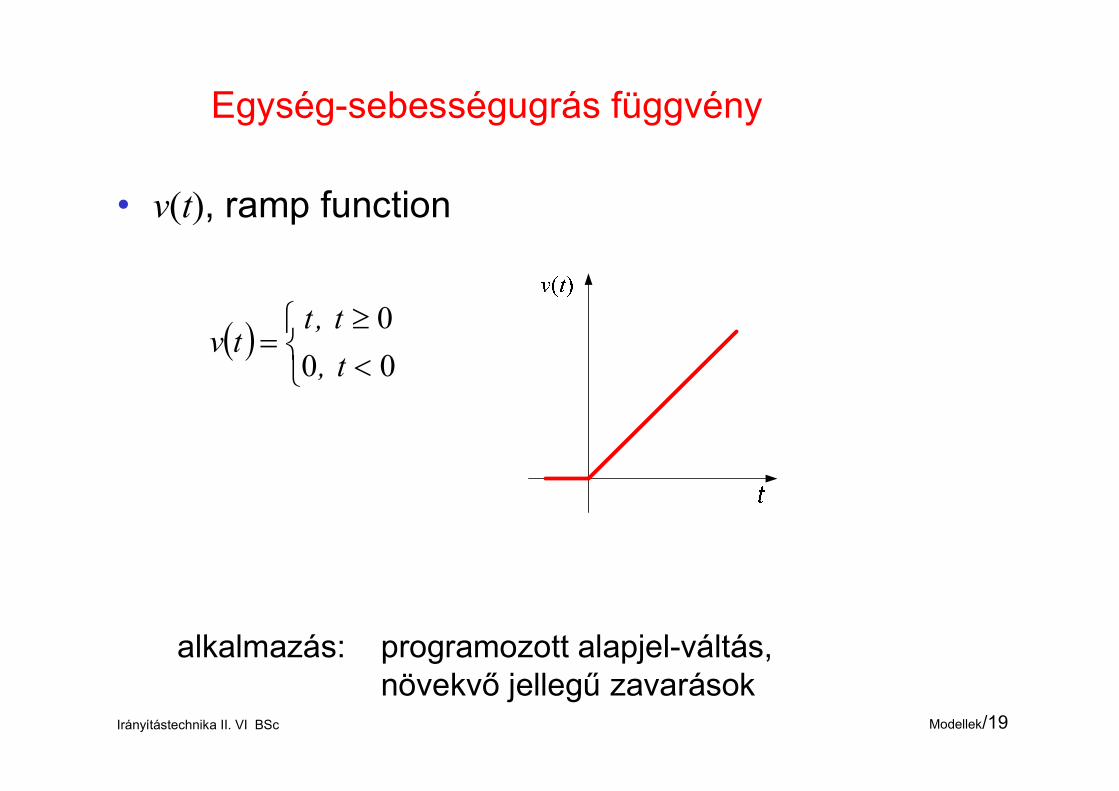
Egység-sebességugrás függvény
• v(t), ramp function
0 0
0
t,
t,ttv
alkalmazás: programozott alapjel-váltás, növekvő jellegű zavarások
Irányítástechnika II. VI BSc Modellek/20
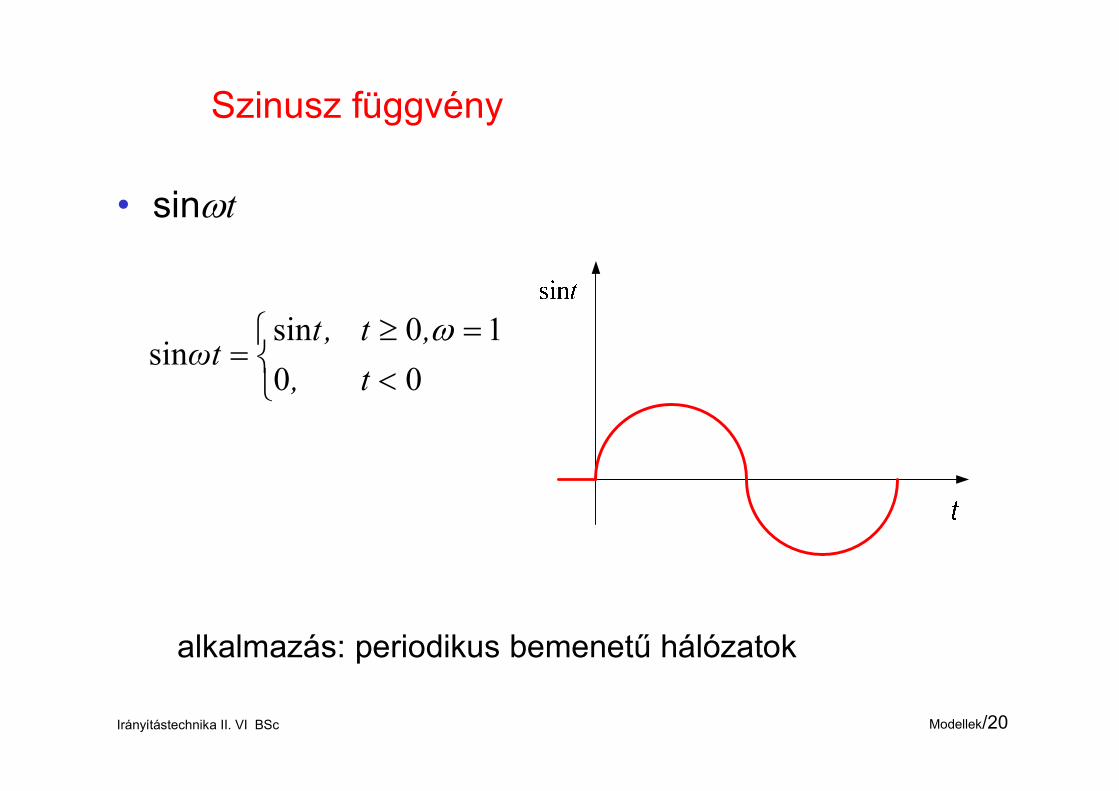
Szinusz függvény
• sinwt
00
10sinsin
t,
,t,tωt
w
alkalmazás: periodikus bemenetű hálózatok
Irányítástechnika II. VI BSc Modellek/21
Nevezetes válaszfüggvények
• Súlyfüggvény:
• Dirac impulzus bemenő jelre adott válaszfüggvény
• jele: h(t)
• Átmeneti függvény:
• Egységugrás bemenő jelre adott válaszfüggvény
• jele: ws(t)
• értelmezhető a egység-sebességugrás és egység-gyorsulás bemenetekre adott válaszfüggvény is
Irányítástechnika II. VI BSc Modellek/22
Átviteli függvény
Az átviteli függvény:
célja: a rendszer modelljének megadása operátor tartományban, a kimenet és a bemenet közti kapcsolat racionális törtfüggvény formájában történő megadásával
0
11
01
1
...
)(
asasa
bsbsb
tuL
tyLsG
nn
nn
mm
mm
fkz

Irányítástechnika II. VI BSc Modellek/23
Átviteli függvény
szokásos jelölései:
számláló gyökei: zérushelyek, zérusok
nevező gyökei: pólusok
)(
)(
)(
)(
)(
)()(
sp
sz
sa
sb
sU
sYsG
0
11
01
1
asasa
bsbsbsG
nn
nn
mm
mm
12
12
pspsps
zszszs
n
m
Irányítástechnika II. VI BSc Modellek/24
Átviteli függvény
• tulajdonságai
• csak lineáris, időinvariáns rendszerekre
• operátortartománybeli kapcsolat
• a rendszer jellemzője, független a rendszer bementének nagyságától, formájától: a rendszer tulajdonságainak hordozója
• kimenetek-bemenetek közötti kapcsolat, a rendszer belső szerkezetéről nem ad információt különböző rendszereknek lehet azonos az átviteli függvénye
Irányítástechnika II. VI BSc Modellek/25
Átviteli függvény
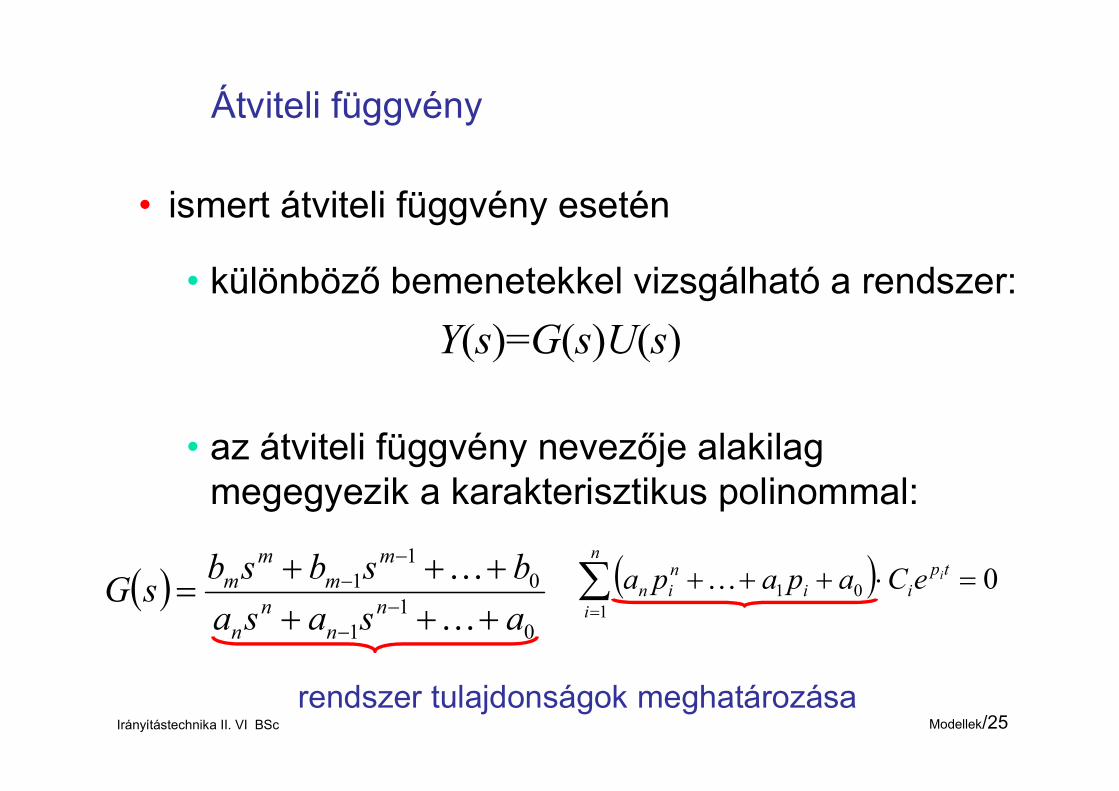
• ismert átviteli függvény esetén
• különböző bemenetekkel vizsgálható a rendszer:
Y(s)=G(s)U(s)
• az átviteli függvény nevezője alakilag megegyezik a karakterisztikus polinommal:
0
11
01
1
asasa
bsbsbsG
nn
nn
mm
mm
01
01
n
i
tpii
nin
ieCapapa
rendszer tulajdonságok meghatározása

Irányítástechnika II. VI BSc Modellek/26
Átviteli függvény
• ha az átviteli függvény alakja ismert, de az együtthatók értéke nem, akkor a vizsgáló jelek segítségével azok meghatározhatók – paraméter identifikáció
• ha az átviteli függvény nem ismert, akkor a vizsgáló jelekre adott kimenetek vizsgálatával meghatározható – struktúra identifikáció

Irányítástechnika II. VI BSc Din._tagok/27
Tipikus dinamikus tagok
• a tagok osztályozása
• az I/O egyenlet kimeneti oldalának deriválási fokszáma alapján, ami megfelel az átviteli függ-vény nevezőjében lévő polinom fokszámának (n)
• az I/O egyenletben a bemenet esetében nem deriválunk, így az átviteli függvényben a számlá-ló fokszáma általában 0, (konstans számláló)
0
11
0
asasa
bsG
nn
nn
ubyayayaya nn
nn 00
11
11
Irányítástechnika II. VI BSc Din._tagok/28
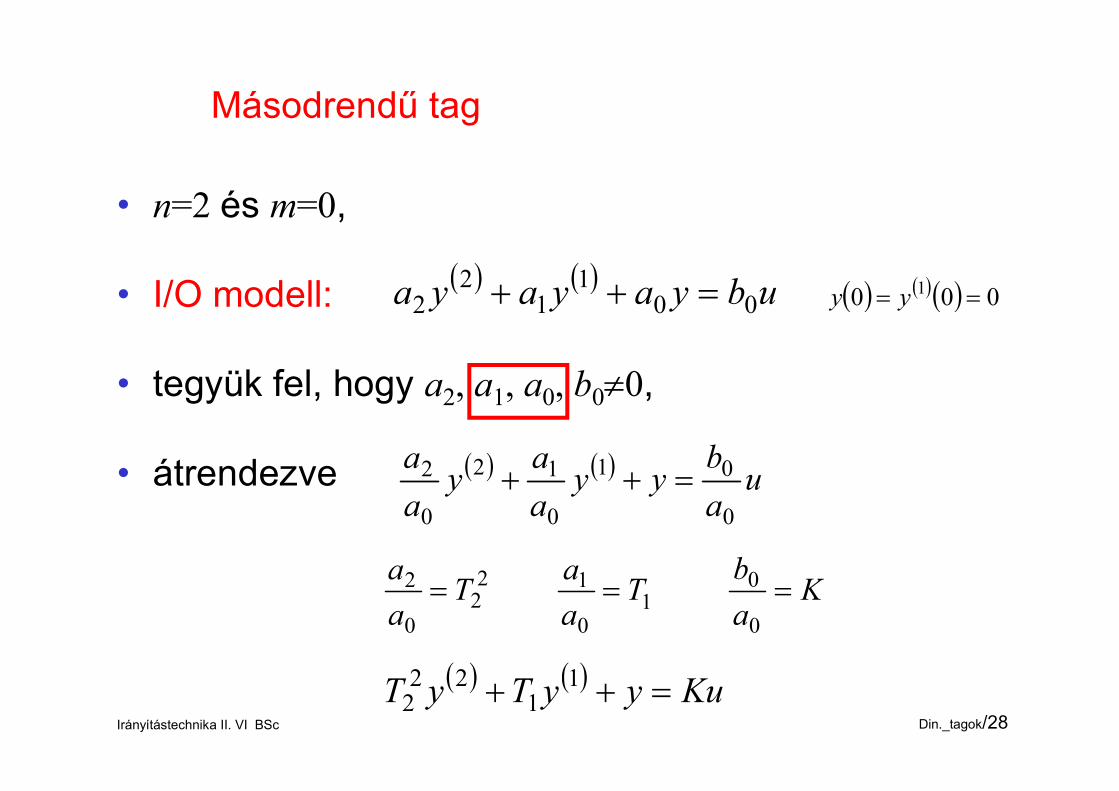
Másodrendű tag
• n=2 és m=0,
• I/O modell:
• tegyük fel, hogy a2, a1, a0, b00,
• átrendezve
001
12
2 ubyayaya
ua
byy
a
ay
a
a
0
01
0
12
0
2
Ka
bT
a
aT
a
a
0
01
0
122
0
2
000 1 yy
KuyyTyT 11
222

Irányítástechnika II. VI BSc Din._tagok/29
Másodrendű tag
• gyakorlatban a két időállandó helyett a következő paramétereket használjuk:
2TT időállandó
csillapítási tényező
KuyTyyT 122 2
Laplace transzformálva:
sKUsYsTsYsYsT 222
2
1
2
1
T
T
Irányítástechnika II. VI BSc Din._tagok/30
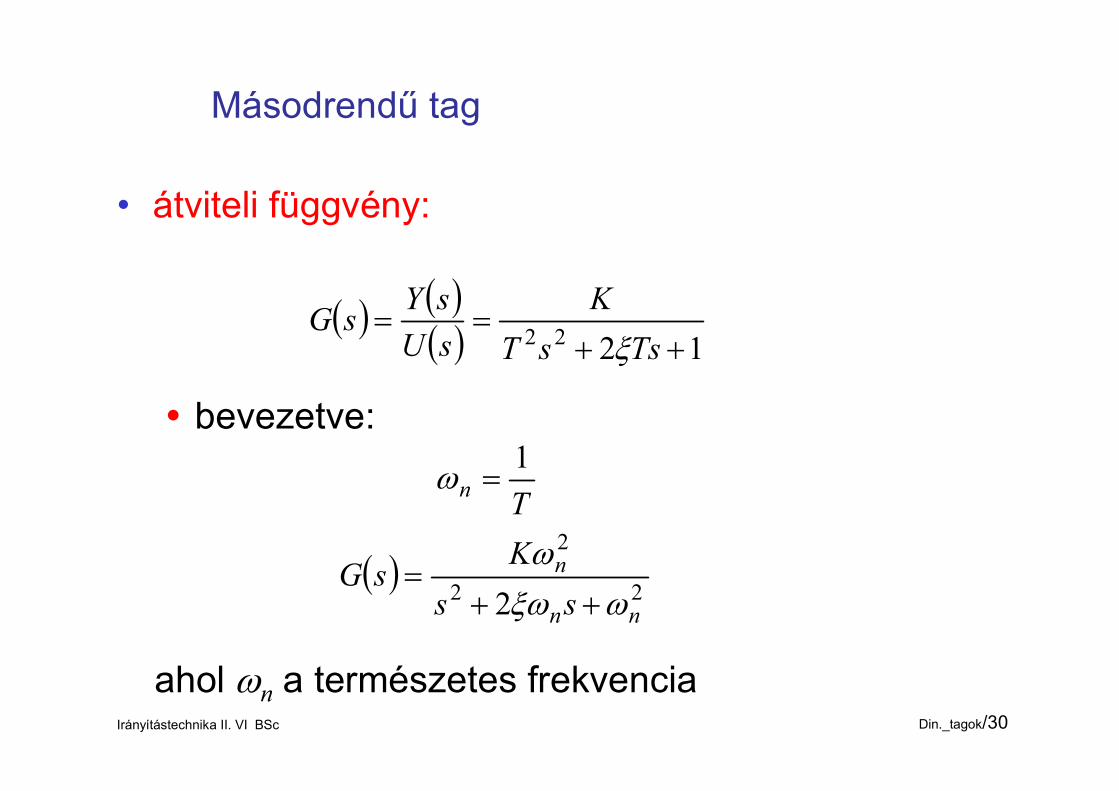
Másodrendű tag
• átviteli függvény:
1222
TssT
K
sU
sYsG
bevezetve:
22
2
2 nn
n
ss
KsG
www
Tn1
w
ahol wn a természetes frekvencia
Irányítástechnika II. VI BSc Din._tagok/31
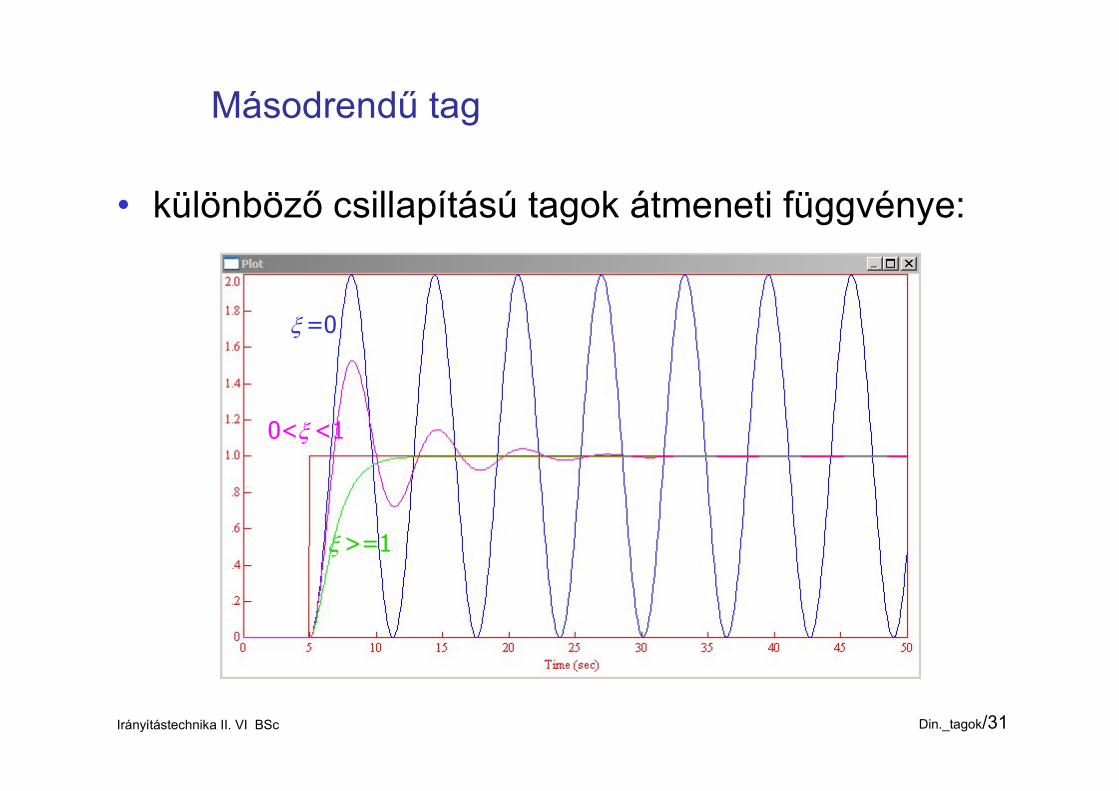
Másodrendű tag
• különböző csillapítású tagok átmeneti függvénye:
=0
0<<1
>=1
Irányítástechnika II. VI BSc Din._tagok/32
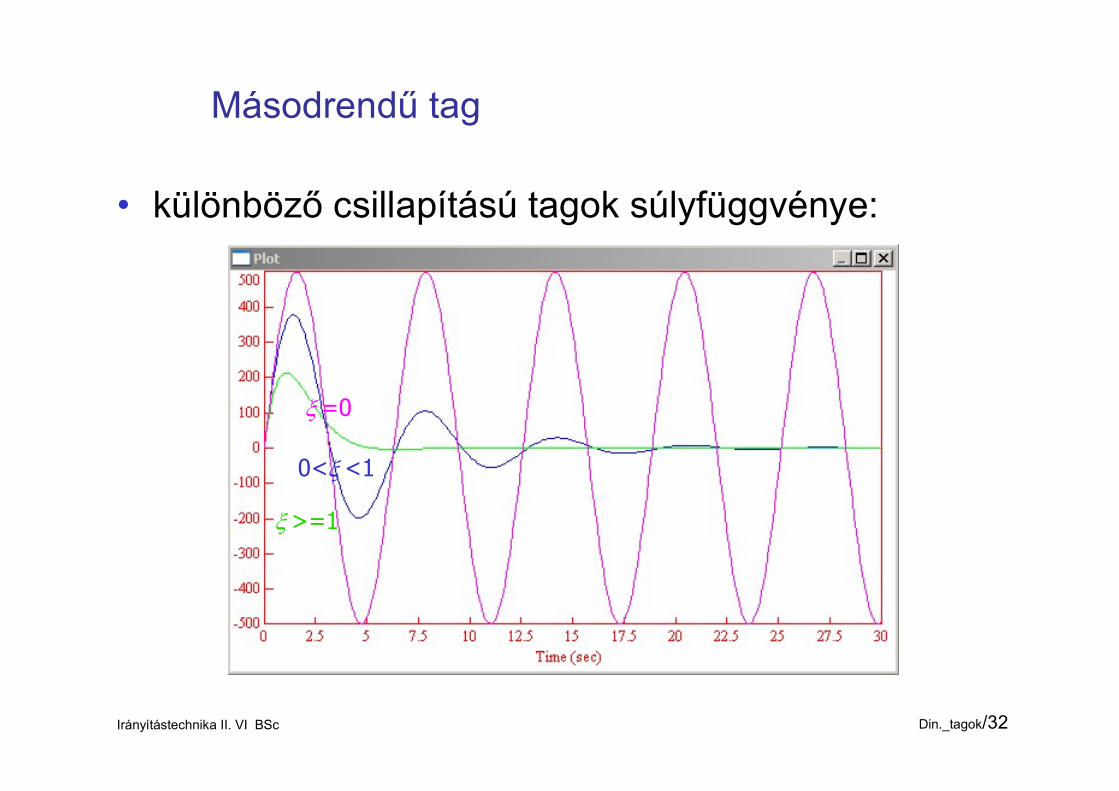
Másodrendű tag
• különböző csillapítású tagok súlyfüggvénye:
0<<1
=0
>=1
Irányítástechnika II. VI BSc Din._tagok/33
Harmad- és magasabb rendű tagok
• pólusok elhelyezkedésének hatása
• ha valamennyi pólus negatív valós, akkor a beállás hasonló a másodrendű rendszerek 1, azaz túlcsillapított esetéhez;
• ha a pólusok között van egy vagy több komplex konjugált gyökpár, de minden pólusra igaz, hogy vagy negatív valós vagy negatív valósrészű, akkor a beállás hasonló a másodrendű rendszerek 0 < < 1, azaz alulcsillapított esetéhez
Irányítástechnika II. VI BSc Din._tagok/34
Harmad- és magasabb rendű tagok
• ha van egy nulla valós részű gyökpár, de minden más pólus valósrésze negatív, akkor a beállás hasonló a másodrendű rendszerek = 0, azaz csillapítás határa esetéhez;
• ha van egy nulla gyök, de minden más pólus valósrésze negatív, akkor a beállás hasonló az egytárolós integráló tag viselkedéséhez;
• ha van egy pozitív valós gyök vagy pozitív valós részű gyökpár, akkor a beállás hasonló a másodrendű rendszerek < 0 esetéhez.
Irányítástechnika II. VI BSc Din._tagok/35
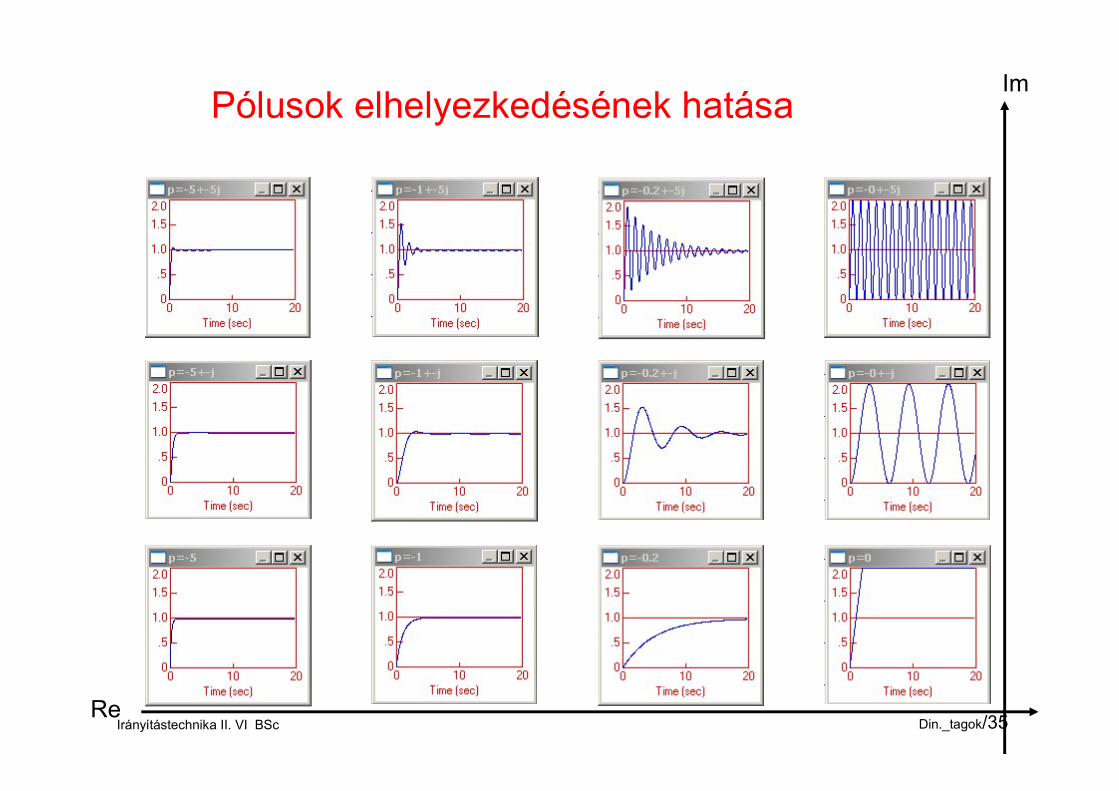
Pólusok elhelyezkedésének hatásaIm
Re

Irányítástechnika II. VI BSc Din._tagok/36
Pólusok elhelyezkedésének hatása
• domináns pólus: ha egy tagnak/rendszernek csak negatív valós vagy negatív valós részű komplex pólusai vannak, akkor ezek közül a képzetes tengelyhez legközelebb elhelyezkedő pólust (a legkisebb abszolút értékű valós résszel rendelkező pólust) domináns pólusnak nevezzük
• ököl szabály a pólusok figyelembe vételére:minden olyan pólus hatását el lehet hanyagolni, amely a képzetes tengelytől 5-6-szor távolabb van, mint a domináns pólus

Irányítástechnika II. VI BSc Din._tagok/37
Tranziens jellemzése
tstmaxtd
tr
ess
ymax
lecsengési idő
max. túl-lendülés ideje
max. túl-lendülés mértéke
felfutási idő
késleltetési idő
maradó hiba
Irányítástechnika II. VI BSc Frekvenciatartomány/38
Frekvenciafüggvények ábrázolási módjai
• Amplitúdó-fázis görbe, Nyquist-diagram
• frekvenciát 0 w < tartományban változtatva minden w értékhez meghatározzuk és a komplex síkon ábrázoljuk a
G (jw) = |G (jw)| G (jw) = A(w)e j(w) == Re(G (jw)) + jIm(G (jw))
képletben szereplő A(w) abszolút értéket és (w) fáziseltolási szöget.
• A jelleg görbe egyes pontja kvázistacionáriusállapotot adnak meg.

Irányítástechnika II. VI BSc Frekvenciatartomány/39
Dinamikus tagok frekvenciafüggvényei
• Nyquist diagram
A(w1)
A(w2)
Irányítástechnika II. VI BSc Frekvenciatartomány/40
Frekvenciafüggvények ábrázolási módjai
• Bode-diagram
• az amplitúdó logaritmusát és a fázisszöget a frekvencia függvényében ábrázolva kapjuk a Bode-diagramot
• G (jw) = A(w) e j(w)= |G (jw)| e j(w)
• lnG (jw) =ln|G (jw)| + j(w)
• gyakorlatban az amplitúdóviszonyt decibelben adjuk meg:
A(w)[dB]= 20lg|G (jw)|

Irányítástechnika II. VI BSc Frekvenciatartomány/41
Dinamikus tagok frekvenciafüggvényei
• Bode diagram
T
1
T
1
Irányítástechnika II. VI BSc Stabilitás/42
Stabilitás
• definíciók
• BIBO stabilitás – külső stabilitás
a bementek – kimenetek viszonyára tesz megkötést
• aszimptotikus stabilitás
a kimenetek határértékére tesz megkötést

Irányítástechnika II. VI BSc Stabilitás/43
BIBO stabilitás
• BIBO stabilitás definíciója
Egy rendszert BIBO stabilnak nevezünk, ha korlátos
bemenet, azaz u(t) < M1, valamely -< t0 t < időintervallum esetén, a kimenete is korlátos: y(t)< M2, a t0 t < időintervallumon (ahol M1, M2 < ,
és t0 a kezdőidőpont) .

Irányítástechnika II. VI BSc Stabilitás/44
BIBO stabilitás
Tétel:
Egy rendszer akkor és csak akkor BIBO stabil, ha
azaz a súlyfüggvény abszolút integrálja korlátos.
0
Mdtth
Irányítástechnika II. VI BSc Stabilitás/45
Aszimptotikus (nulla bemeneti) stabilitás
Legyen n-ed rendű lineáris, időinvariáns rendszer
bemenete zérus, a kimenete pedig a kezdeti
értékek miatt y(t). Ekkor y(t) a következő módon
fejezhető ki:
ahol gk(t) jelöli az y(k)(t0) kezdeti értékek miatti, a
nulla bemenetre adott válasz (k+1)-dik
komponensét és
0
1
0
tytgty kn
kk
0
0
t
k
kk
dt
tydty
Irányítástechnika II. VI BSc Stabilitás/46
Aszimptotikus (nulla bemeneti) stabilitás
Nulla bemeneti stabilitás definíciója
Egy lineáris időinvariáns rendszert tetszőleges,
nem minden esetben zérus kezdeti feltételek
esetén nulla bemeneti stabilitásúnak nevezzük,
ha megválasztható egy M korlát
M(y(t0), y(1)(t0),…, y(n-1)(t0)) > 0,
úgy, hogy
y(t) M < , t t0
és 0
tylimt

Irányítástechnika II. VI BSc Stabilitás/47
Stabilitás – Általános feltétel
A homogén egyenlet általános megoldása:
ahol p1, p2,…, pn a homogén egyenletnek megfelelő karakterisztikus egyenlet gyökei, ci konstansok
aszimptotikus stabilitás:
teljesül: ha ezek a gyökök negatív valósak, vagy negatív valós részű komplex gyökpárok:
Re{pi} < 0, pi, i=1,…,n
n
k
tpk
tpn
tptp kn ececececty1
2121
0
tylimt
Irányítástechnika II. VI BSc Stabilitás/48
Stabilitás – Általános feltétel
Operátor tartományban
Átviteli függvény
ahol a p1, p2,…, pn gyökök a nevező polinomjának gyökei, azaz a pólusok, és megfelelnek a homogén differenciálegyenlethez tartozó karakterisztikus egyenlet gyökeinek
Így a rendszer stabilitáshoz ezeknek a gyököknek az előjelét kell ellenőrizni komplex sík baloldali félsíkjára esnek-e
n
mn
n
mm
psps
zszs
a
b
asa
bsb
sU
sYsG
1
1
0
0
0
0
Irányítástechnika II. VI BSc Stabilitás/49
Stabilitás definíciók összehasonlítása
• BIBO stabilitás: korlátos bemenetre korlátos válasz
• Aszimptotikus stabilitás:
• nulla bemenet és nem zérus kezdeti feltételek esetén nullához tartó kimenet
• ugrás jel bemenetre az erősítés által meghatározott végértékhez tartó válasz
• Aszimptotikusan stabil rendszer BIBO stabil is
• BIBO stabil rendszer nem feltétlenül aszimptotikusan stabil
Irányítástechnika II. VI BSc Stabilitás/50
Stabilitásvizsgálati módszerek
• szükségességük
• fajtáik
• algebrai: Routh-Hurwitz módszer
• frekvenciatartomány: Nyquist-kritérium
Bode-kritérium
• geometriai: gyökhelygörbe módszer
Irányítástechnika II. VI BSc Stabilitás/51
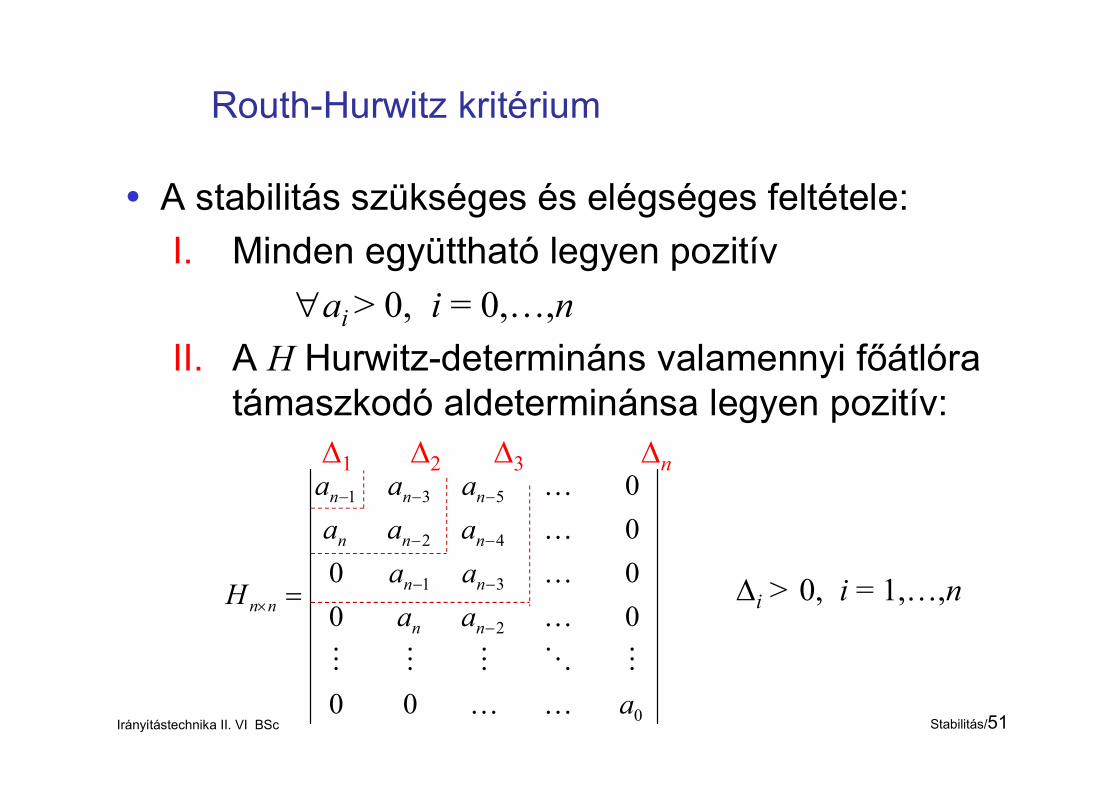
Routh-Hurwitz kritérium
A stabilitás szükséges és elégséges feltétele:
I. Minden együttható legyen pozitív
ai > 0, i = 0,…,n
II. A H Hurwitz-determináns valamennyi főátlóra támaszkodó aldeterminánsa legyen pozitív:
1 2 3 n
i > 0, i = 1,…,n
0
2
31
42
531
00
00
00
0
0
a
aa
aa
aaa
aaa
Hnn
nn
nnn
nnn
nn

Irányítástechnika II. VI BSc Stabilitás/52
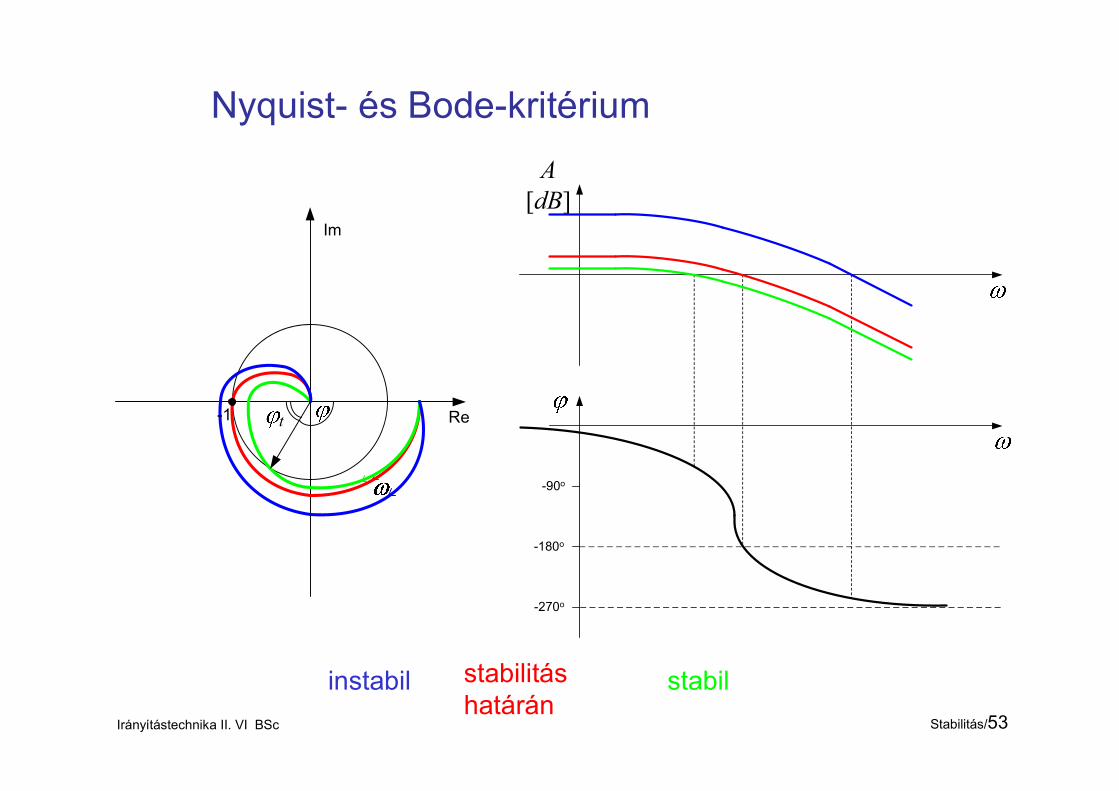
Nyquist- és Bode-kritérium
frekvenciatartományban alkalmazott geometria kritérium
alapelv: a felnyitott kör helygörbéjéből következtetünk a zárt rendszer stabilitási viszonyaira
Irányítástechnika II. VI BSc Stabilitás/53
-90o
-180o
-270o
A [dB]
Nyquist- és Bode-kritérium
Re
Im
-1 t
instabil stabilitás határán
stabil

Irányítástechnika II. VI BSc Stabilitás/54
Bode-kritérium
Erősítési tartalék
[dB]
fizikai értelmezés
Fázistartalék
t
-90o
-180o
-270o
A [dB]
{
t
Re
Im
-1 t

Irányítástechnika II. VI BSc Stabilitás/55
Gyökhelygörbe
• Def.:
A gyökhelygörbe a zárt rendszer pólusainak mértani helye a komplex síkon, miközben a rendszer valamely paraméterét zérus és végtelen között változtatjuk
• módszer célja:
• stabilitásvizsgálat
• minőségi jellemzők hozzávetőleges meghatározása

Irányítástechnika II. VI BSc Stabilitás/56
Gyökhelygörbe
• a gyökhelygörbe tulajdonságai
1. A gyökhelygörbének annyi ága van, amennyi a zárt rendszer pólusainak a száma.
2. A gyökhelygörbe mindig szimmetrikus a valós tengelyre nézve.
Irányítástechnika II. VI BSc Stabilitás/57
Gyökhelygörbe
3. Legyen n a pólusok száma, m a zérushelyekszáma a felnyitott körben
• ha n > m, akkor a gyökhelygörbe a felnyitott kör pólusaiból indul ki, és m számú ág a felnyitott kör zérushelyeibe, n - m számú ág a végtelenbe tart;
• ha n = m, akkor a gyökhelygörbe teljesen a végesben van;
• ha n < m, akkor m - n számú ág a végtelenből indul ki (nem reális eset).
Irányítástechnika II. VI BSc Stabilitás/58
Gyökhelygörbe
4. A valós tengelyen akkor és csak akkor lehetnek gyökhelygörbe szakaszok, ha a vizsgált ponttól jobbra a pólusok és a zérushelyek együttes száma páratlan.
5. A gyökhelygörbe aszimptótáinak irányát az
összefüggés adja meg.
12531180
mn,,...,,lmn
l o

Gyökhelygörbe
6. A gyökhelygörbe aszimptótái a valós tengelyt az alábbi összefüggés által meghatározott ún. súlypontban metszik. Jelölje pi a felnyitott kör i-dik pólusát, zj a felnyitott kör j-dik zérusát. Ekkor az S súlypont értéke:
Irányítástechnika II. VI BSc Stabilitás/59
mn
zp
mn
zp
S
m
j
j
n
i
i
m
j
j
n
i
i
1111
ReRe
Gyökhelygörbe
7. A gyökhelygörbe és a képzetes tengely metszés-pontja, vagyis a stabilitáshatárához tartozó erősítési értékhez tartozó pólusok a korábban ismertetett Hurwitz determináns segítségével határozhatók meg.
8. A gyökhelygörbe kilépése a valós tengelyből, vagyis a valós tengelynek az az x pontja, ahol többszörös gyököket kapunk a következő egyenlet segítségével határozható meg:
Irányítástechnika II. VI BSc Stabilitás/60
011
11
m
j j
n
i i zxpx
Gyökhelygörbe
9. A gyökhelygörbe kilépése a komplex pólusokból a szögfeltétel segítségével határozható meg, úgy, hogy felveszünk egy pontot a pólushoz közel, és arra nézve megoldjuk a szögfeltételt:
Irányítástechnika II. VI BSc Stabilitás/61
01811
ln
ii
m
kk

Irányítástechnika II. VI BSc Stabilitás/62
Gyökhelygörbe - példák
legyen n = 2, m = 1 és 0 < < 1
KsKTs
TsKsG
ss
TsKsG e
12
1
12
12222
Re
Im
1

Irányítástechnika felosztása
irányítás
vezérlés szabályozás
kézi önműködő kézi önműködő
Irányítástechnika II. VI BSc Alapfogalmak/63
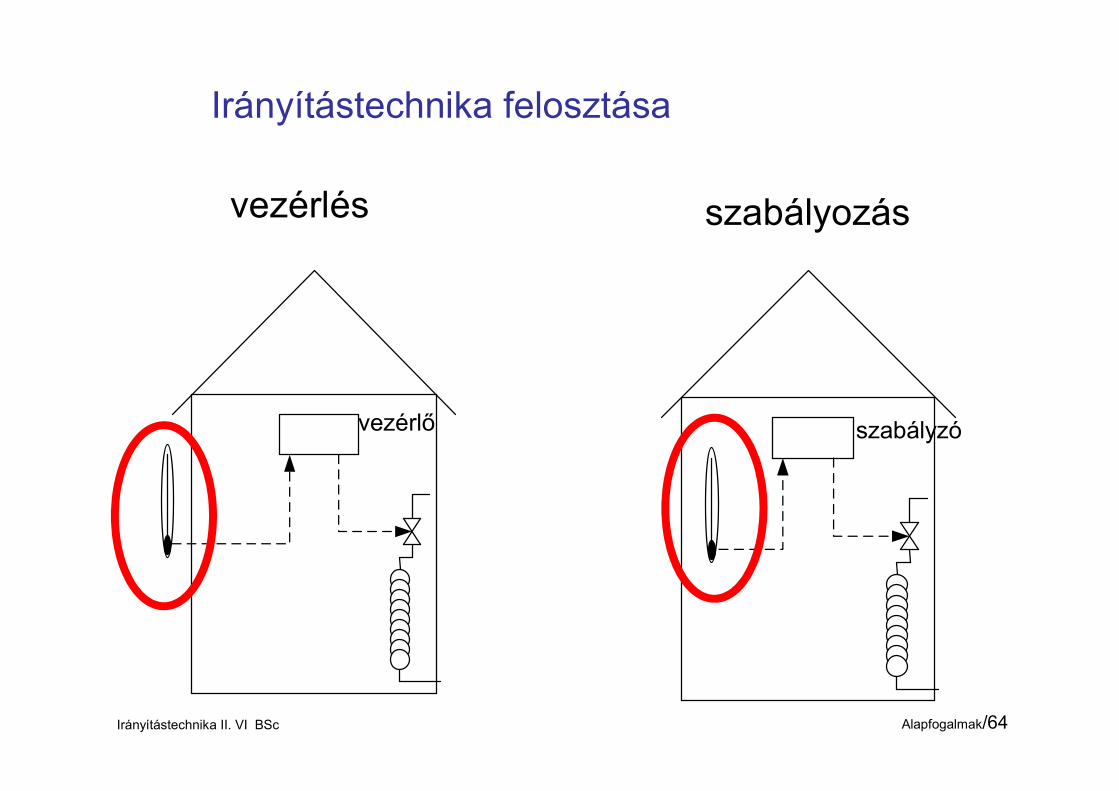
Irányítástechnika felosztása
vezérlés
Irányítástechnika II. VI BSc Alapfogalmak/64
szabályozás
vezérlő szabályzó
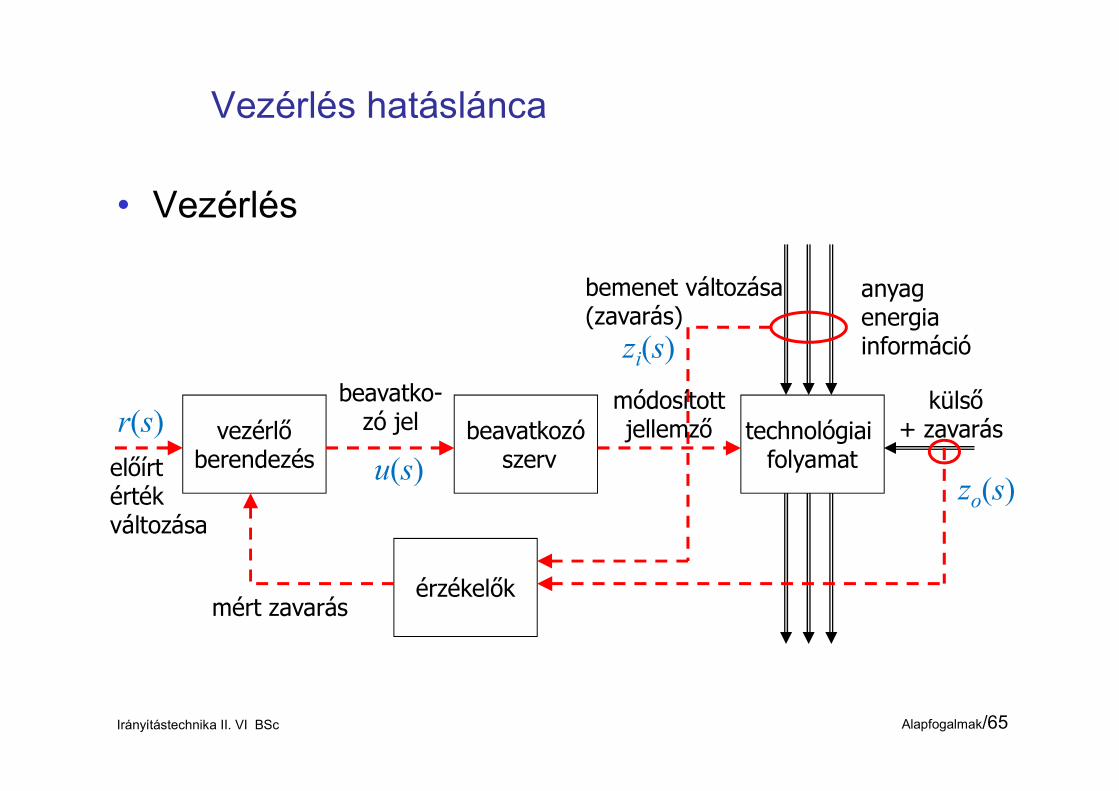
Vezérlés hatáslánca
• Vezérlés
Irányítástechnika II. VI BSc Alapfogalmak/65
technológiai folyamat
anyagenergiainformáció
külső + zavarásbeavatkozó
szervvezérlő
berendezés
érzékelők
bemenet változása(zavarás)
mért zavarás
előírt értékváltozása
beavatko-zó jel
módosítottjellemzőr(s)
zo(s)
zi(s)
u(s)
Vezérlés
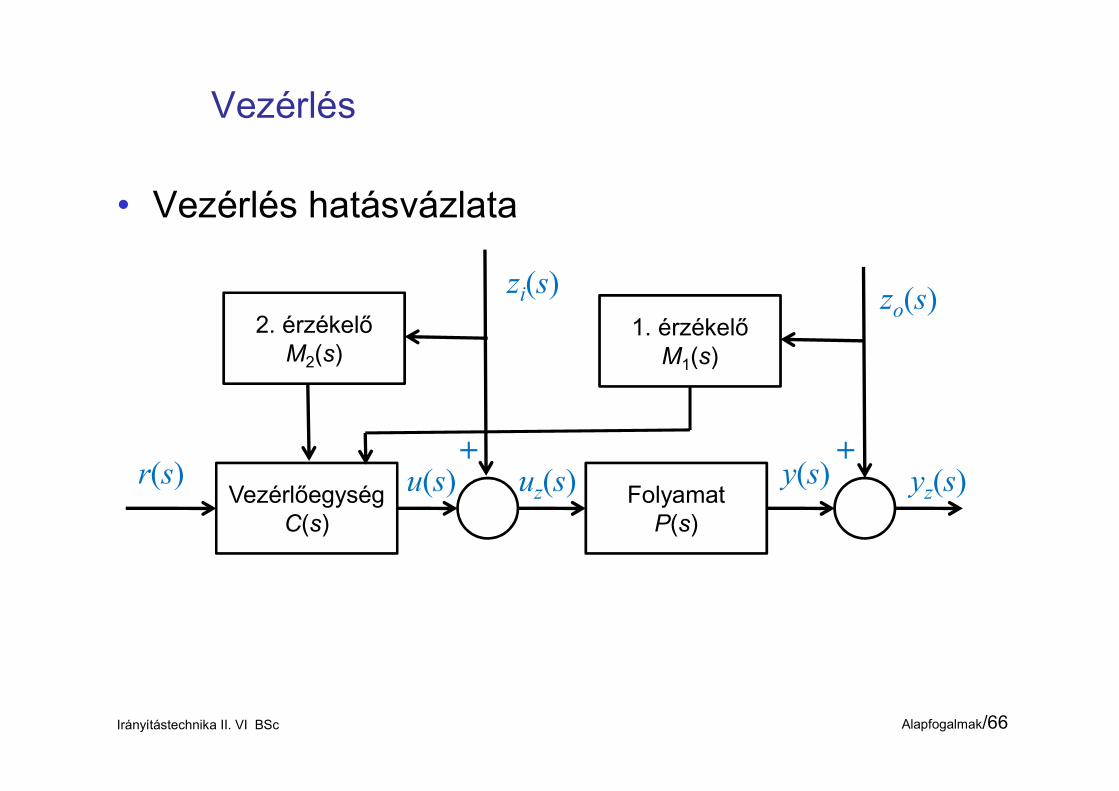
• Vezérlés hatásvázlata
Irányítástechnika II. VI BSc Alapfogalmak/66
VezérlőegységC(s)
FolyamatP(s)
r(s)
zi(s) zo(s)
y(s) yz(s)u(s) uz(s)+ +
2. érzékelőM2(s)
1. érzékelőM1(s)
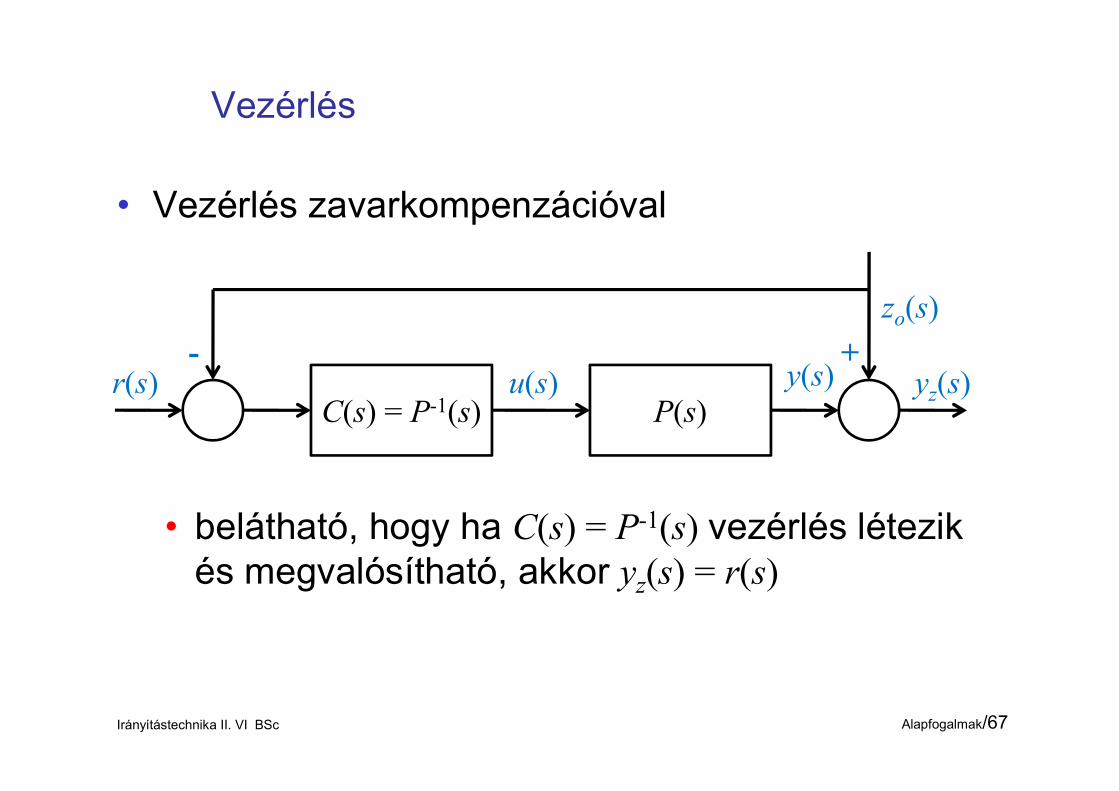
Vezérlés
• Vezérlés zavarkompenzációval
• belátható, hogy ha C(s) = P-1(s) vezérlés létezik és megvalósítható, akkor yz(s) = r(s)
Irányítástechnika II. VI BSc Alapfogalmak/67
C(s) = P-1(s) P(s)r(s)
zo(s)
y(s) yz(s)u(s)+-
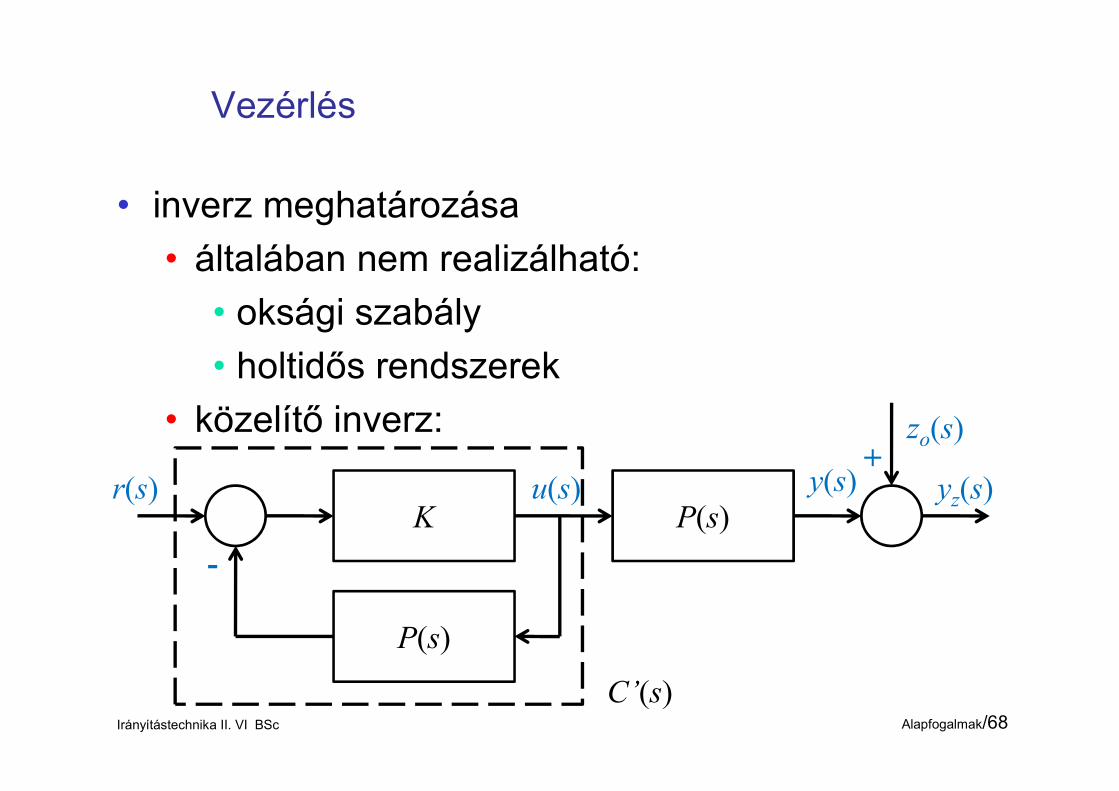
Vezérlés
• inverz meghatározása
• általában nem realizálható:
• oksági szabály
• holtidős rendszerek
• közelítő inverz:
Irányítástechnika II. VI BSc Alapfogalmak/68
K P(s)r(s)
zo(s)
y(s) yz(s)u(s)+
-
P(s)
C’(s)
Vezérlés
• a vezérlő eredő átviteli függvénye:
• ha K értéke elegendően nagy, akkor:
Irányítástechnika II. VI BSc Alapfogalmak/69
sPK
sKP
KsC
11
1'
sPsC
1'

Szabályozás
• Szabályozás hatáslánca
Irányítástechnika II. VI BSc Alapfogalmak/70
technológiai folyamat
anyagenergiainformáció
+ zavarás
beavatkozószerv
szabályzóberendezés
érzékelőelőírt érték
alapjel
+ -ellenőrző
jel
rendelkező jelhiba jel
beavatko-zó jel
módosítottjellemző
szabályozottjellemző
y(t)
e(t)
u(t)
ym(t)r(t)
um(t)
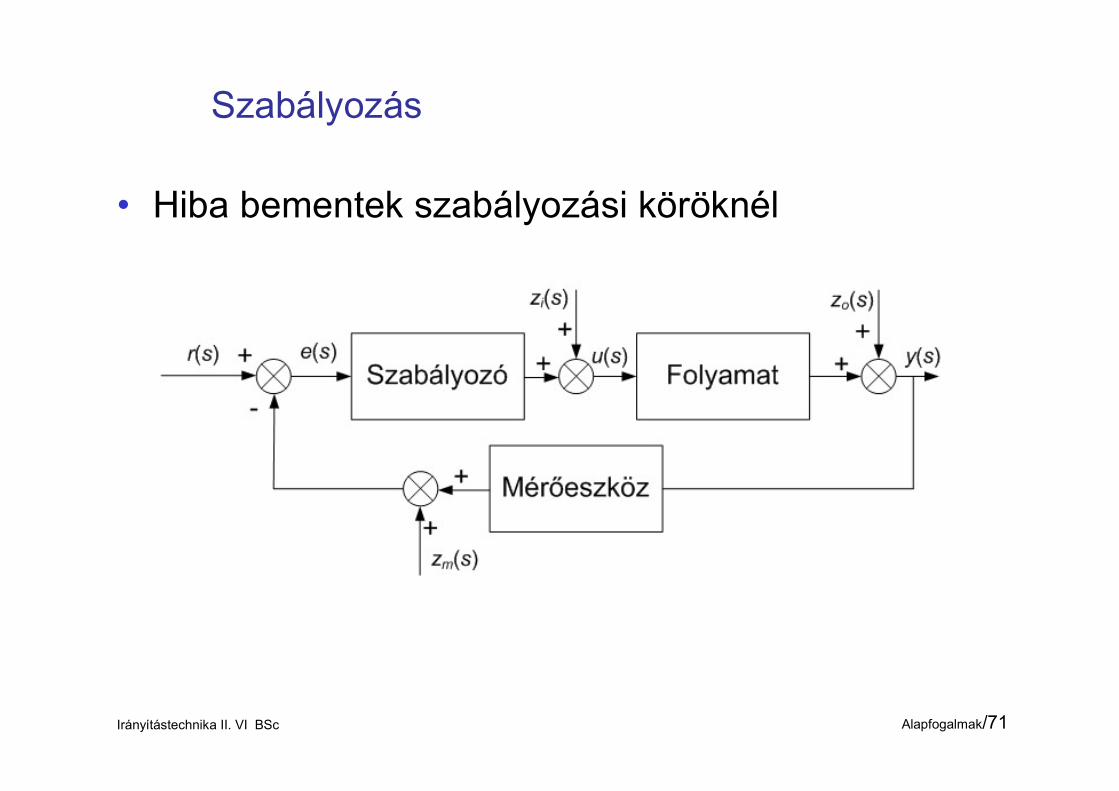
Szabályozás
• Hiba bementek szabályozási köröknél
Irányítástechnika II. VI BSc Alapfogalmak/71

Szabályozás
• Szabályozási struktúrák
• Soros vagy kaszkád elrendezés
Irányítástechnika II. VI BSc Alapfogalmak/72

Szabályozás
• Visszacsatolásos kompenzáció
Irányítástechnika II. VI BSc Alapfogalmak/73

Szabályozás
• Előrecsatolásos kompenzáció
Irányítástechnika II. VI BSc Alapfogalmak/74

Szabályozás
• Állapot-visszacsatolás
Irányítástechnika II. VI BSc Alapfogalmak/75

Szabályozás
• Negatívan visszacsatolt szabályzási kör fontosabb tulajdonságai
• Stabilitás
• minimális elvárás
• beavatkozást a folyamat dinamikája késlelteti
• rossz esetben a beavatkozás ellentétes fázisban történik, ami labilitáshoz vezet
Irányítástechnika II. VI BSc Alapfogalmak/76
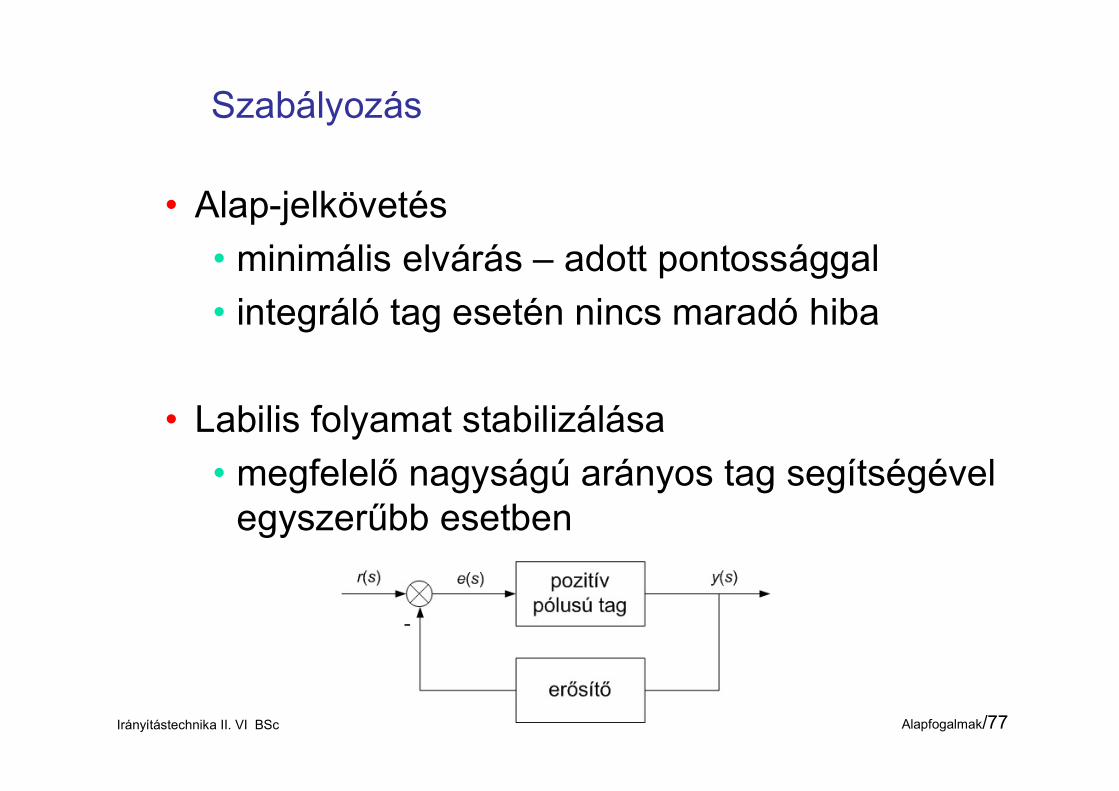
Szabályozás
• Alap-jelkövetés
• minimális elvárás – adott pontossággal
• integráló tag esetén nincs maradó hiba
• Labilis folyamat stabilizálása
• megfelelő nagyságú arányos tag segítségével egyszerűbb esetben
Irányítástechnika II. VI BSc Alapfogalmak/77

Szabályozás
• Tranziens viselkedés javítása
• hurok átviteli tényező 1
• időállandó csökken
• Zavarás hatásának csökkentése
• bizonyos típusú zavarások esetén
Irányítástechnika II. VI BSc Alapfogalmak/78
Szabályozás
• Érzéketlenség paraméterváltozásra
• Nagy erősítés esetén a visszacsatolás a visszacsatoló tag közelítő inverzét képezi
• Linearizáló hatás
Irányítástechnika II. VI BSc Alapfogalmak/79

Vezérlés - szabályozás
Irányítástechnika II. VI BSc Alapfogalmak/80
vezérlés szabályozás
zavaró jellemző
néhány, előre ismert zavarás kompenzálása
minden zavarás kompenzálása
irányított jellemző
ha nincs ismeretlen zavarás, akkor mindig az előírt értéken
van eltérés, ez működteti a rendszert
irányítási szervek
pontosan ismerni kell minden elemet
nem kell a pontos ismeret
működési sajátosságok
mindig stabillehet instabil (labilis) is
Recommended

















