
1 “Introduction and
Mathematics Revision”
Signal Analysis
J. A. M. Felippe de SouzaJ. A. M. Felippe de Souza

When we talk about signals generally it is associated with a measurement of some physical phenomenon or, in other words, of a system.
Therefore, signals and systems are concepts very interconnected.
Signal Analysis – Introduction______________________________________________________________________________________________________________________________________________________________________________________

(input) (output)
Signal Analysis – Introduction______________________________________________________________________________________________________________________________________________________________________________________
When one speaks of signals it is usually associated with the measurement or recording of some physical phenomenon or, in other words, of a system.
Therefore, signals and systems are very interconnected concepts

Signal Analysis – Introduction______________________________________________________________________________________________________________________________________________________________________________________
In this first chapter we will briefly review several basic topics of mathematics that will be useful for subsequent chapters.
We will summarize various results, expressions and formulas
of Algebra,
of Linear Algebra,
of Analysis,
of Differential and Integral Calculus
of Trigonometry
which will be somewhat used in this text.
In chapters 2 and 3 we will deal with the description and terminology of signals, while in chapter 4 we will deal with systems.
In the remaining chapters we will deal with some signal analysis tools:
Laplace Transforms (chapter 5),
z-Transforms (chapter 6),
Fourier Series and Transforms (chapters 7 e 8), and
Diagrams de Bode (chapter 9).

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
1j −=
The imaginary number “ j ” In Math literature it is very common to use “ i ”
(of “imaginary”) to a imaginary number:
1i −=However, in engineering the letter “ i ” is usually reserved for the electric
current (measured in Ampères) while for the imaginary number we use the letter “ j ”
1j2 −=1j3 −−=
1j4 =
1jjjj 145 −==⋅=
1jjjj 2246 −==⋅=
and so on.1jjjj 3347 −−==⋅=
111jjj 448 =⋅=⋅=
j)1(
j
jj
j
j
1j 1 −=
−=
⋅==−
1j 2 −=−
jj 3 =−
1j 4 =−

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
A complex number z ∈ ℂ is expressed by:
jz β+α=where α and β ∈ R (real numbers) and j is a pure
imaginary number as defined above.
α and β are called: α = real part of z, e
β = imaginary part de z
α = Re (z) β = Im (z).
A complex number z ∈ ℂ written in the above form is said to be in the “Cartesian
form” or in the “Algebraic form”.

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
A complex number z ∈ ℂ can be written equivalently as:
θ⋅ρ= jz ewhere ρ and θ are real numbers, with ρ > 0and θ (in radians) is an arc.
The above expression is very commonly abbreviated (especially in engineering texts) to
θ∠⋅ρ=z for the sake of simplicity.
ρ and θ are called:
Moreover, in this case, when using this
notation for z, it is common to denote
the angle θ in degrees instead of radians.
ρ = absolute value of z, and
θ = angle or phase of z
ρ = |z|
θ = ∠z
The complex number z written in this
form above is said to be in the “polar form” or “trigonometric form”.

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Transformation from Cartesian form to polar form
22|z| β+α==ρ
=∠=αβθ arctgz
Transformation from polar form to Cartesian form
θ⋅ρ==α cos)zRe( θ⋅ρ==β sen)zIm(
)7854,0(j
)4/(j
2
8284,2
22
º31522
º4522
j22z
−
π−
⋅=⋅=
∠=
−∠=
−=
e
e

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
The conjugate of a complex number z ∈ ℂ jz β+α=is the complex number or z *z
z z* j= = α − βIn terms of the polar form the conjugate of a complex number
θ⋅ρ= jz e
is given by:
Note that
* *z (z ) z= =
in addition, if x is a real number (x ∈ R),
that is, x is a complex number with the
imaginary part equal to zero, then:
* *x (x ) x= =
θ−⋅ρ== j*zz e
Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
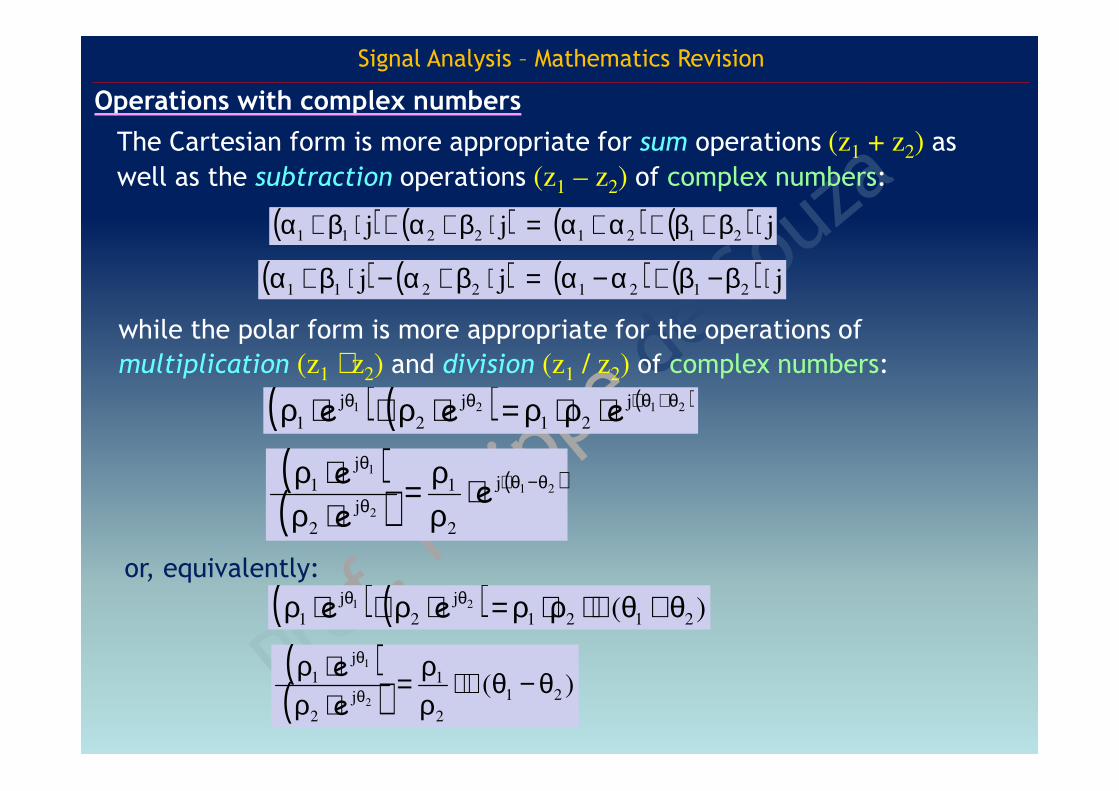
Operations with complex numbers
The Cartesian form is more appropriate for sum operations (z1 + z2) as
well as the subtraction operations (z1 – z2) of complex numbers:
( ) ( ) ( ) ( ) jjj 21212211 ⋅β+β+α+α=⋅β+α+⋅β+α
( ) ( ) ( ) ( ) jjj 21212211 ⋅β−β+α−α=⋅β+α−⋅β+α
while the polar form is more appropriate for the operations of
multiplication (z1 ⋅ z2) and division (z1 / z2) of complex numbers:
( ) ( ) ( )2121 j21
j2
j1
θ+θ⋅θθ ⋅ρ⋅ρ=⋅ρ⋅⋅ρ eee
( )( )
( )21
2
1j
2
1j
2
j1 θ−θ⋅
θ
θ
⋅ρρ=
⋅ρ⋅ρ
ee
e
or, equivalently:
( ) ( ) )( 2121j
2j
121 θ+θ∠⋅ρ⋅ρ=⋅ρ⋅⋅ρ θθ
ee
( )( ) )( 21
2
1j
2
j1
2
1
θ−θ∠⋅ρρ=
⋅ρ⋅ρ
θ
θ
e
e

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
A very useful result is given by the equation below:
( ) ( ) 22jj β+α=β−α⋅β+αthat is, the product of a complex number z by its conjugate is a real number (a
complex number without the imaginary part) and whose value is the sum of the
square of the real part of z with the square of the imaginary part of z.
BjAj
j
z
z ⋅+=ω+σβ+α=
′
This result allows you to write a fraction between complex numbers either in
Cartesian form A + j⋅B, that is,
( )( )( )( )
( ) ( )22
j
jj
jj
zz
zz
z
z
ω+σαω−βσ⋅+βω+ασ=
ω−σω+σω−σβ+α=
′′′
=′
( )( )
( )( )2222
jz
z
ω+σαω−βσ⋅+
ω+σβω+ασ=
′
( )( )22
Aω+σβω+ασ=
( )( )22
Bω+σαω−βσ=
and therefore,
In other words, by multiplying both the numerator and the denominator
of z/z’ by the conjugate of the denominator we have:

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Another very useful result is the following: θ∀=θ ,1je
that is, is a point on the circumference of radius 1 centred on the originof the s plane.
θ= jz e
10j =e
j2j
=π
e
1j −=πe
j2j
−=π−
e
is the point of this circumferencewhose angle to the positive
real axis is θ.
In fact
θ= jz e

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
The sine and the co-sine
Pythagorean theorem
222 cba +=
The tangent

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
( ) 1)(cossen 22 =θ+θ
π+θ=
θ−π=θ2
sen2
sen)(cos
( )
π−θ=θ2
cossen
( ) ( )θ−π=θ sensen
( ) ( )θ−π−=θ coscos
( ) ( )θ−−=θ sensen
( ) ( )θ−=θ coscos
co-sine
sine

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
tangent
( ) ( ) ( )π−θ=π+θ=θ tgtgtg
( ) ( ) { }...,2,1,0k,ktgtg ±±∈π+θ=θ

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Euler’s equation
θ⋅+θ=θ senjcosje
2cos
jj θ−θ +=θ ee
j2sen
jj θ−θ −=θ ee
The Swiss mathematician and physicist Leonhard Euler (1707-1783) published the following result in 1748:
and we can easily obtain:

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
The inverse functions of sine, cosine, and tangent
The sine, cosine, and tangent functions are not invertible.
α ∈[–1, 1], β ∈[–1, 1], γ ∈(–∞, ∞),
and then there will be many values of t∈(–∞, ∞) for which
In order to find the inverse function of sine, cosine and tangent we have to limit the interval of these functions.
x(t) = sin (ωt) = α x(t) = cos (ωt) = β x(t) = tg (ωt) = γ
In the case of the sine we limit the interval t∈[–π/2 , π/2],
in the cosine case we limit the interval t∈[0 , π],
and in the case of the tangent we limit the interval t∈[–π/2 , π/2].
By the graphics of x(t) = sin (ωt), x(t) = cos (ωt) and x(t) = tg (ωt) we see that
α and β are values in the range [–1, 1], e γ for any real value, that is,

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
sine, co-sine and tangent with their limited intervals
This is the general rule adopted by calculating machines and modern computing means. The arc is limited to 2 quadrants:
1st and 4th quadrant, in the case of sine and also of tangent; and 1st and 2nd quadrant, in the case of co-sine.
In this way it is possible to speak in the inverse functions: of sine, co-sine and tangent:
arcsin (α), arccos (β) and arctg (γ).

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
For example, if γ = 1 ( ) º454
1arctg =π=Although there are many others arcs θwhose tangent is also 1.
º225eº45 =θ=θIn the particular case of the inverse
of a fraction (b/a)
arcsin (b/a),arccos (b/a) and
arctg (b/a)
then we can take into account the
quadrant of the point (a, b).
In this way the inverse of sine,
cosine or tangent is not limited to
the interval [–π/2 , π/2] or [0 , π]
which represent only 2 quadrants,
since we have enough information
to determine the arc in the 4
quadrants.
Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
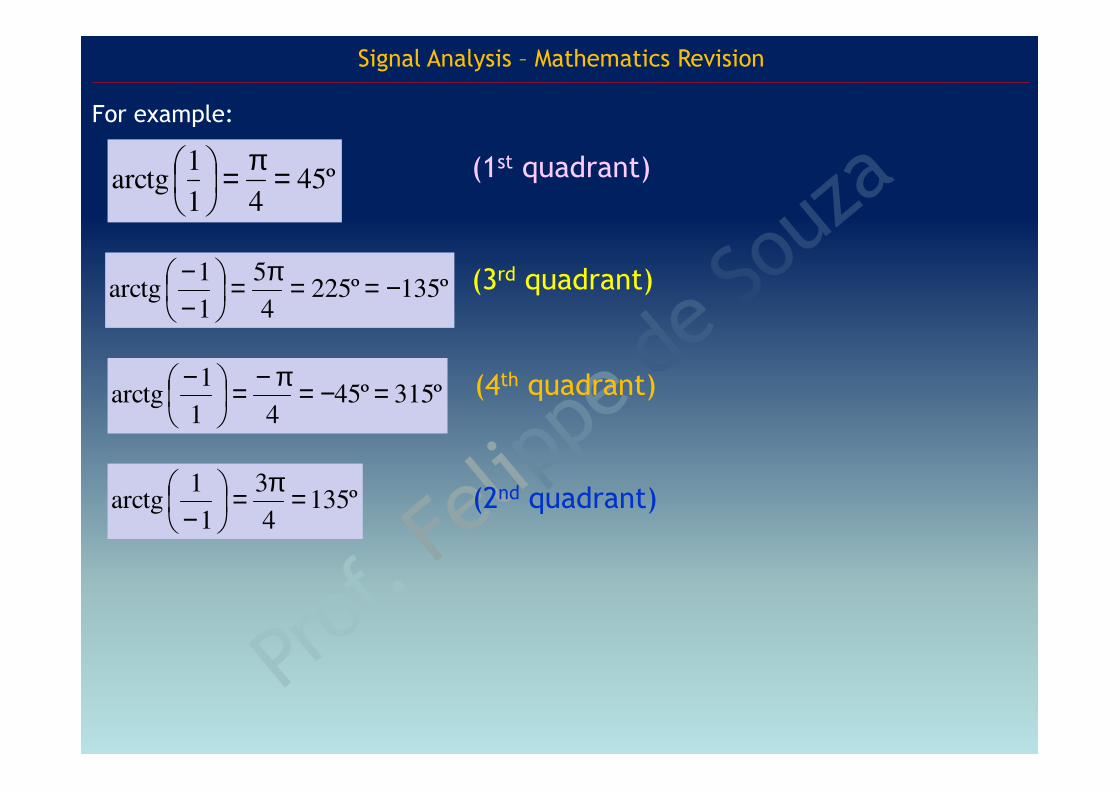
º4541
1tgarc =π=
º135º2254
5
1
1tgarc −==π=
−−
º315º4541
1tgarc =−=π−=
−
º1354
3
1
1tgarc =π=
−
(1st quadrant)
(3rd quadrant)
(4th quadrant)
(2nd quadrant)
For example:

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
More precisely, it can be written as an infinite series or as a boundary (the latter form due to the Swiss mathematician Jakob Bernoulli, 1654-1705):
Exponentials and logarithms
The “Neperian number” e (due to the mathematician, astrologer and Scottish
theologian John Napier, 1550-1617) is worth approximately e = 2.7183
∞
=
=0n !n
1e
n
n
11lim
n
+=∞→
e
The “Neperian number” e is also called the “Euler constant” and is the basis of
natural logarithms (ln). ( ) xxln =e
Some basic relations of exponentials and logarithms:
yxyx +=⋅ eee yx
y
x−= e
e
e ( ) yxyx ⋅= ee

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Transformation of the base e to base 10:
( ) ( )( )
( ) ( )xln4343,03,2
xln
10ln
xlnxlog10 ⋅===
Transformation of the base 10 to base e:
( ) ( )( )
( ) ( )xlog3,24343,0
xlog
log
xlogxln 10
10
10
10 ⋅===e
Transformation from any base “b” to base “a”:
( ) ( )( )alog
xlogxlog
b
ba =
( ) ( ) ( )ylnxlnyxln +=⋅ ( ) ( )ylnxlny
xln −=
( ) ( )xlnaxln a =
( ) ( )x
1xx /1lnln ==−ee
Some basic relations of exponentials and logarithms:

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Derivatives
The theory of differential calculus was created by the English physicist and mathematician
Sir Isaac Newton (1643-1727) and the German philosopher and mathematician
Gottfried Wilhelm von Leibniz (1646-1716).
The notation of the derivatives of a
function f(t) can bedt
df(due to Newton)
)t('f (due to Leibniz)
The derivative of a function f(t) at time t gives us the slope of a line tangent to the
curve at that instant.
Se f(t) is increasing in t = a, then the derivative will be positive in that instant
0>dt
df)a('f
at=
=
On the other hand, if f(t) is decreasing in t = a, then the derivative will be negative
in that instant
0<dt
df)a('f
at==

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Negative slope of the tangent line to the
curve f(t) at the instant t = a.
Positive slope of the tangent line to the
curve f(t) at the instant t = a.

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Inclinação nula (ou declive nulo) da reta
tangente à curva f(t) no instante t = a.
Inflection point case, neither local maximum nor local minimum.
Zero slope of the tangent line to the
curve f(t) at the instant t = a.
Case of local maximum or minimum.
Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
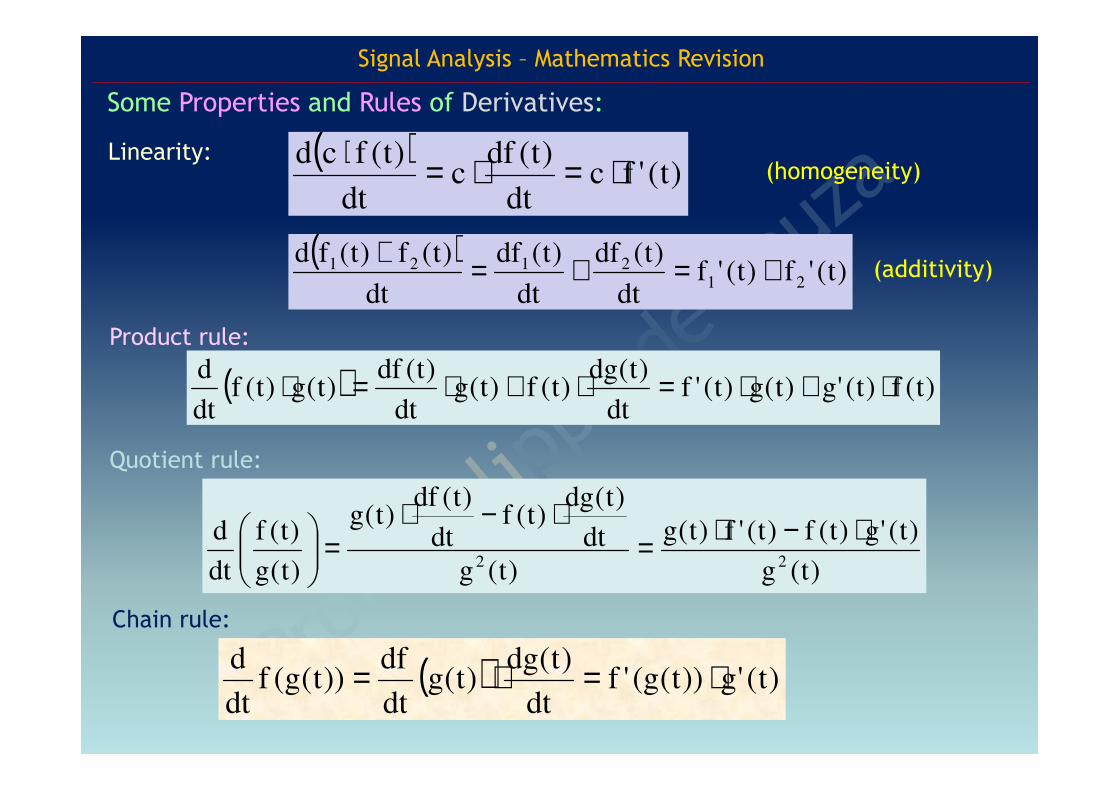
Some Properties and Rules of Derivatives:
Linearity: ( ))t('fc
dt
)t(dfc
dt
)t(fcd ⋅=⋅=⋅
( ))t('f)t('f
dt
)t(df
dt
)t(df
dt
)t(f)t(fd21
2121 +=+=+
(homogeneity)
(additivity)
Product rule:
( ) )t(f)t('g)t(g)t('fdt
)t(dg)t(f)t(g
dt
)t(df)t(g)t(f
dt
d ⋅+⋅=⋅+⋅=⋅
Quotient rule:
)t(g
)t('g)t(f)t('f)t(g
)t(gdt
)t(dg)t(f
dt
)t(df)t(g
)t(g
)t(f
dt
d22
⋅−⋅=⋅−⋅
=
Chain rule:
( ) )t('g))t(g('fdt
)t(dg)t(g
dt
df))t(g(f
dt
d ⋅=⋅=

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
If we define
)t(f)t(u = and
and
)t(g)t(v =then,
udt
df ′= vdt
dg ′=
and the above rules can be rewritten in a compact form as:
( ) ucuc ′⋅=′⋅ (homogeneity)
( ) vuvu ′+′=′+ (additivity)
( ) vuvuvu ′⋅+⋅′=′⋅ (Product rule)
2v
vuuv
v
u ′⋅−′⋅=′
(Quotient rule)
dt
dv
dv
du
dt
du ⋅= (Chain rule)

Signal Analysis – Mathematics Revision ______________________________________________________________________________________________________________________________________________________________________________________
Integrals
The indefinite integral of a function f(t) is represented as τ⋅τ d)(f
On the other hand, the definite integral, represented as
τ⋅τb
ad)(f ∞−
τ⋅τb
d)(f ∞
τ⋅τa
d)(f
does the Riemann Sum calculating the area under the curve at a well-defined interval.
Georg Friedrich Bernhard Riemann (1826-1866), the German mathematician
The integral is an inverse process of the derivative of functions since,
( ) ( ) Ctfdfdtdt
)t(dfdt)t(
dt
dfdttf +====′
( ) )t(fdt)t(fdt
d =⋅or

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
This result is called the Fundamental Theorem of Calculus and makes the inter-connection between Differential and Integral Calculus.
More precisely : ⋅=
t
adt)t(f)t(F is called the primitive of f(t).
Some rules of integration of functions in general
( ) ( ) Cdttfadttfa +⋅=
( ) ( )[ ] ( ) ( ) Cdttgdttfdttgtf ++=+
( ) ( )[ ] ( ) ( ) ′⋅+⋅=⋅′ dttg)t(f)t(gtfdttgtf (integral by parts)
(additivity)
(homogeneity)
If we define )t(g)t(u = and
and
)t(f)t(v =
then, dt)t(gdu ⋅′= dt)t(fdv ⋅′=
Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
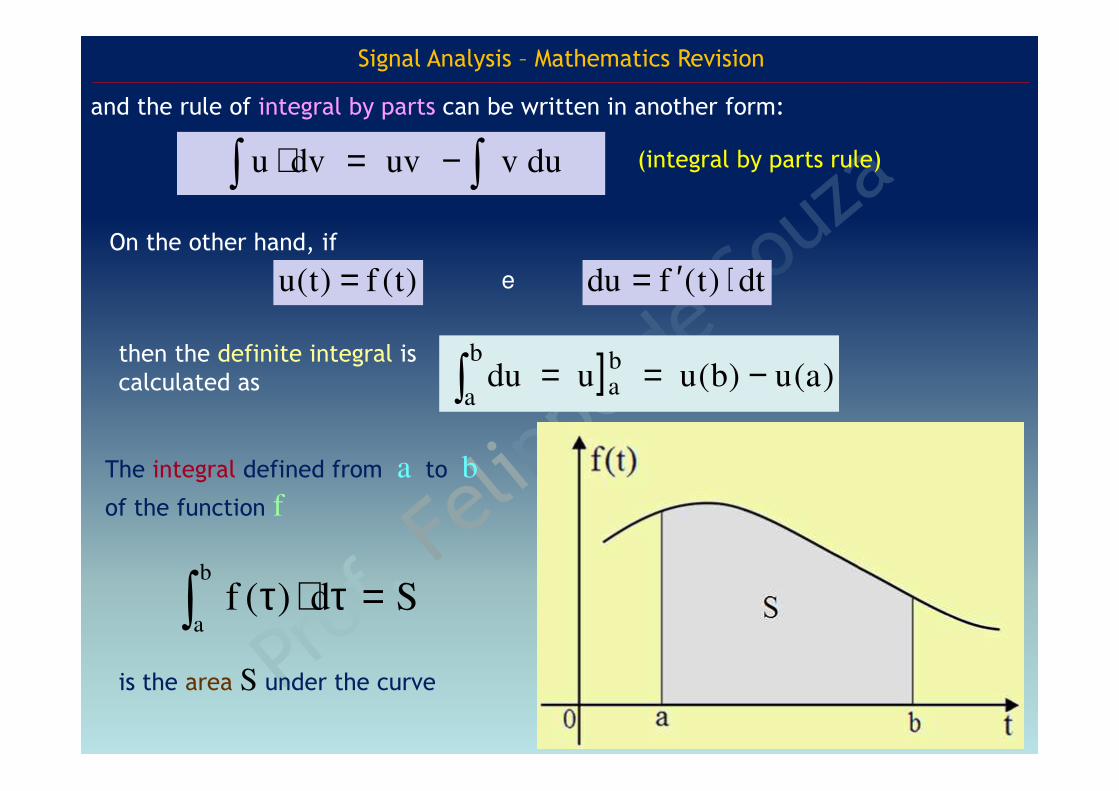
and the rule of integral by parts can be written in another form:
−=⋅ duvuvdvu (integral by parts rule)
On the other hand, if
)t(f)t(u = e dt)t(fdu ⋅′=
then the definite integral is calculated as ] )a(u)b(uudu
ba
b
a−==
The integral defined from a to bof the function f
Sd)(fb
a=τ⋅τ
is the area S under the curve

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Two examples of the integral defined from a to b f the function f, where areas below
the abscissa axis count negatively.
21
b
a1 SSd)(f −=τ⋅τ 321
b
a2 SSSd)(f +−=τ⋅τ

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Two examples of the integral defined in infinite intervals such as: ( –∞, b] or [ a, ∞ ).
'Sd)(fb
3 =τ⋅τ ∞− ''Sd)(fa 4 =τ⋅τ∞

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Decibels (dB)
The unity Bell (B) has got this name in allusion to the Scottish Alexander Graham
Bell (1847-1922). The decibel (dB) is a submultiple of the Bell corresponding to a
tenth of the Bell. However, the decibel became a unit much more commonly used than the Bell.
The decibel (dB) is used for a wide variety of measurements, especially in
Acoustics (sound intensity), but also as a measure of gain or relative intensity in
Physics (for pressure r) and in Electronics (for electric voltage v, for electric
current i, or for power P).
The decibel (dB) is a dimensionless unit of measure, similar to
the angle measured by the radian (rad) or by the degree (º), and
the percentage (%).
The deciBel is therefore a unit of relative strength or power (a measure of the ratio of two quantities, one of which is a reference).
The definition of dB is obtained with the use of logarithms in the following way:
x in decibels usually is defined as: ( )xlog20x 10dB⋅=

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Since the decibel (dB) is a relative gain measure (relative to a reference value) only decibels of positive values are calculated.It makes no sense to calculate the decibels of a negative value.
( ) dB01log201 10dB=⋅=
Another detail:
dBdB x
1x −=
Values greater than 1 will become positive when transformed into dB.
They represent an actual gain.
On the other hand, values less than 1 (i.e., values between 0 and 1) will
become negative when transformed into dB.
They represent an attenuation.

Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
if x 1>
if x 1=
if 0 < x < 1
if x < 0
dB x > 0dB
dB x 0dB=
dB x < 0dB
dBdoes not exist x

Some examples:
( ) dB2010log2001 10dB=⋅=
( ) ( ) ( ) dB2010log20110log201,010
110
110dB
dB
−=⋅⋅−=⋅== −
( ) dB4010log2010100 210dB
2
dB=⋅==
dB65,0dB
−=dB62dB
=
dB32dB
= dB32
1
dB
−=
dB46200 dB= dB142,0dB
−= dB3450 dB=
Signal Analysis – Mathematics Revision______________________________________________________________________________________________________________________________________________________________________________________
Recommended


















