Embed Size (px)
Citation preview

InhaltsverzeichnisSeite 1: Matrizen
Seite 23: Funktionen
Seite 51: Integralrechnung
Seite 69: Binomialverteilung
Seite 86: Statistik/Normalverteilung
Seite 104: Vektoren
Seite 140: Wachstum

Bjarne Kolb
C
A B
0 , 6
0 ,8 0 , 7
0, 20, 1 0, 2
0,1
0,1
0,2
0,5 0,1 0,6 0,2
0,2 0,3 0,2 0,3
0,2 0,4 0,1 0,2
0,1 0,2 0,1 0,3
A
=
Lineare Algebra
Matrizen
Lernen für das Abitur
Bjarne Kolb Lernen für das Abitur – Matrizen
Inhalt
- Definition Matrizen Seite 3 - Anwendung Matrizen Seite 6 - Beispielaufgaben Seite 15

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 3
1
0
3S SA v
= =
( )2 0 5Z ZA v= = −
11 12 1
21 22 2
1 2
n
n
m m mn
a a a
a a aA
a a a
=
⋯
⋯
⋮ ⋮ ⋱ ⋮
⋯
Matrizen allgemein – Definition der Matrix
Eine Matrix ist ein rechteckiges Schema von Zahlen. Sie wird dabei wie eine Tabelle in Zeilen und Spalten unterteilt, meistens gibt man die Anzahl der Zeilen mit m und die Anzahl der Spalten mit n an; entsprechend der Größe wird die Matrix als m n× -Matrix bezeichnet
Als Namen verwendet man Großbuchstaben, z.B. A, die einzelnen Elemente der Matrix werden mit denselben Buchstaben in klein benannt. Zusätzlich gibt man noch die Position des Elements innerhalb der Matrix an. Die Zahl in der zweiten Zeile und der dritten Spalte
von A wird z.B. als 23a bezeichnet
Einen besonderen Fall gibt es, eine Matrix mit nur einer Zeile oder einer Spalte nennt man Vektor. Auch die einzelnen Zeilen bzw. Spalten einer größeren Matrix werden Vektor genannt
– Rechnen mit Matrizen Addieren und Subtrahieren kann man Matrizen ganz einfach, indem man die einzelnen Elemente addiert oder subtrahiert. Nach diesem Prinzip kann man auch eine Matrix mit einem Faktor multiplizieren, indem man die einzelnen Elemente vervielfacht
11 12 11 12 11 11 12 12
21 22 21 22 21 21 22 22
11 12 11 12 11 11 12 12
21 22 21 22 21 21 22 22
11 12 11 12
21 22 21 22
a a b b a b a b
a a b b a b a b
a a b b a b a b
a a b b a b a b
a a k a k ak
a a k a k a
+ + + = + +
− − − = − − ⋅ ⋅ ⋅ = ⋅ ⋅
Addieren und Subtrahieren kann man Matrizen nur bei gleicher Größe, bei der Multiplikation ist die Größe unbedeutend

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 4
11 12 13 1411 12 13
21 22 23 2421 22 23
31 32 33 3431 32 33
41 42 43 44
11 12
11 12 1321 22
21 22 2331 32
41 42
b b b ba a a
b b b ba a a
b b b ba a a
b b b b
a a
b b ba a
b b ba a
a a
⋅
⋅
Komplizierter wird es, wenn man Matrizen miteinander multipliziert. Es ist überhaupt nur möglich, wenn die Anzahl der Spalten der ersten Matrix mit der Anzahl der Zeilen der zweiten Matrix übereinstimmt.
Bei der Multiplikation selbst ergibt sich der Wert eines Elements der Ergebnismatrix aus der entsprechenden Zeile der ersten Matrix und der Spalte der zweiten Matrix, genauer gesagt dem Skalarprodukt aus Zeilen- und Spaltenvektor
Mit dem folgenden Schema kann man sich die Multiplikation erleichtern
11 12
21 22
31 32
b b
b b
b b
11 12 13
21 22 23
a a a
a a a 11 12
21 22
c c
c c
Wenn man eine Matrix mit sich selbst multipliziert, spricht man von einer Matrixpotenz
Multiplikation unmöglich
Multiplikation möglich

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 5
Besondere Matrizen – Quadratische Matrix Eine quadratische Matrix ist eine Matrix mit gleich vielen Zeilen und Spalten
11 12 13
21 22 23
31 32 33
a a a
Q a a a
a a a
=
– Einheitsmatrix Wenn die quadratische Matrix dann nur aus Einsen in der Hauptdiagonalen und Nullen neben der Hauptdiagonalen besteht, spricht man von einer Einheitsmatrix
1 0 0
0 1 0
0 0 1
E
=
– Transponierte Matrix Wenn man bei einer Matrix die Zeilen und Spalten vertauscht, also im Prinzip die Matrix an der Hauptdiagonalen spiegelt, erhält man die transponierte Matrix
11 1211 21 31
21 2212 22 32
31 32
T
a aa a a
A a a Aa a a
a a
= =
– Determinante Jede quadratische Matrix hat eine Determinante, diese ist aber per Hand bei größeren Matrizen schwer zu bestimmen, deswegen verwendet man am besten den Taschenrechner und die Funktion det unter |2nd|MATRIX|
– Inverse Matrix Wenn eine quadratische Matrix eine Determinante ungleich 0 hat, gibt es eine inverse Matrix. Die inverse Matrix ist dadurch definiert, dass das Produkt aus Matrix und inverser Matrix die Einheitsmatrix ergibt
1 1A A A A E− −⋅ = ⋅ =

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 6
1 1 1 2 1 3 1
2 1 2 2 2 3 2
3 1 3 2 3 3 3
4 1 4 2 4 3 4
a v b v c v d
a v b v c v d
a v b v c v d
a v b v c v d
⋅ + ⋅ + ⋅ =
⋅ + ⋅ + ⋅ =
⋅ + ⋅ + ⋅ =
⋅ + ⋅ + ⋅ =
3 2 2
2 3 6
10 7 4 36
2
a b c
a b c
a b c
a b c
+ + =
− − − =−
− + =
+ + =
[ ]( )
1 0 0 1
0 1 0 2
0 0 1 3
0 0 0 0
rref A
− =
[ ]
3 2 1 2
1 2 3 6
10 7 4 36
1 1 1 2
A
− − − − = −
[ ]
1 1 1 1
2 2 2 2
3 3 3 3
4 4 4 4
a b c d
a b c dA
a b c d
a b c d
=
1
2
3
a
b
c
=
=−
=
Gleichungssysteme mit Matrizen lösen Die in der Schulmathematik am häufigsten verwendete Funktion von Matrizen ist das Lösen von Gleichungssystemen
Dafür muss das Gleichungssystem zuerst in eine bestimmte Form gebracht werden, nämlich mit allen Variablen auf der linken Seite der Gleichung und dem festen Faktor auf der rechten. Außerdem müssen jeweils die gleichen Variablen übereinander stehen
Beispiel:
Diese Gleichungen werden dann ohne Variablen und Rechenzeichen in eine Matrix übertragen
Beispiel:
Wenn man nicht ausführlich per Hand rechnen will, kann man die Funktion rref (reduced row echelon form) unter |2nd|MATRIX| auf dem Taschenrechner lösen
[ ]( )rref A Beispiel:
Die Ergebnismatrix kann man dann durch Hinzufügen der vorher ausgelassenen Variablen und Rechenzeichen wieder in ein Gleichungssystem umwandeln und so die Lösung erhalten
Beispiel:
Will man die Matrix doch selbst lösen, muss man nach dem so genannten Gauß-Algorithmus vorgehen

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 7
Gauß-Algorithmus Der Gauß-Algorithmus besteht aus einer Reihe von Schritten, mit denen man eine aus einem Gleichungssystem gebildete Matrix lösen kann. Theoretisch kann man auch direkt mit dem Gleichungssystem arbeiten, aber das ist unnötige zusätzliche Schreibarbeit
0 Ausgangsmatrix 3 2 1 2
10 7 4 36
1 1 1 2
A
B
C
−
1 Die erste Zahl in der Hauptdiagonalen
durch Multiplikation oder Vertauschen von Zeilen auf 1 bringen
3 2 1 2 1 1 1 2
10 7 4 36 10 7 4 36
1 1 1 2 3 2 1 2
C
A
− ⇒ −
2 Alle Elemente unterhalb dieses ersten
aus Schritt 1 durch Addition auf 0 bringen
1 1 1 2 1 1 1 2
10 7 4 36 10 0 17 6 16
3 2 1 2 3 0 1 2 4
A B
A C
− − ⇒ − −
3 Die Schritte 1 und 2 für alle Elemente
der Hauptdiagonalen durchführen (Ausnahme letzte Spalte)
128
1 1 1 2 1 1 1 2
0 17 6 16 0 1 2 4
0 1 2 4 0 17 6 16 17
1 1 1 2 1 1 1 2
0 1 2 4 0 1 2 4
0 0 28 84 0 0 1 3
C
B B C
− ⇒ − − ⇒ ⇒ ⋅
4 Falls bereits ein Widerspruch entsteht,
kann man mit dem Lösen aufhören, es gibt dann keine Lösung
5 Durch Addition in der vorletzten Zeile
alle Elemente bis auf das in der Hauptdiagonalen und das letzte eliminieren
1 1 1 2 1 1 1 2
0 1 2 4 2 0 1 0 2
0 0 1 3 0 0 1 3
B C
− ⇒ −
6 Schritt 5 für jede weitere Zeile
oberhalb wiederholen 1 1 1 2 1 0 0 1
0 1 0 2 0 1 0 2
0 0 1 3 0 0 1 3
A B C − − − ⇒ −
7 Die Matrix ist so weit wie möglich
gelöst und muss jetzt wieder in ein Gleichungssystem umgewandelt werden
1 0 0 1 1
0 1 0 2 2
0 0 1 3 3
a
b
c
= − ⇒ =− =
Bjarne Kolb Lernen für das Abitur – Matrizen Seite 8
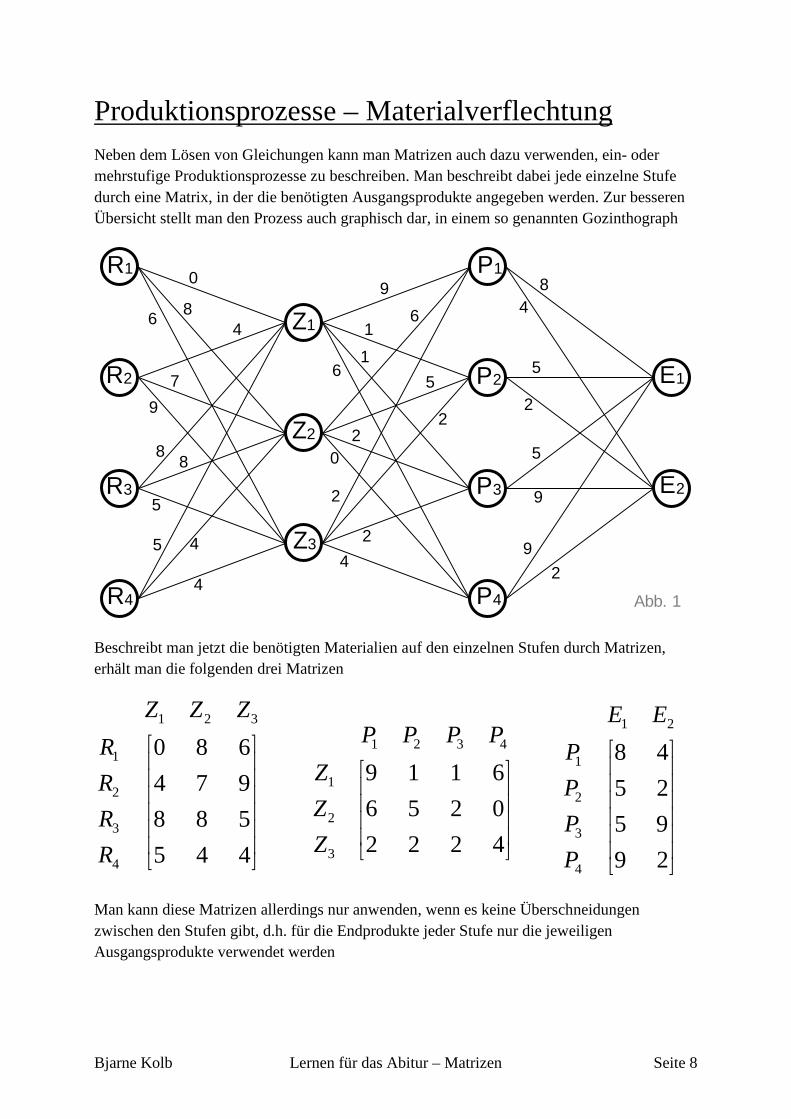
Produktionsprozesse – Materialverflechtung Neben dem Lösen von Gleichungen kann man Matrizen auch dazu verwenden, ein- oder mehrstufige Produktionsprozesse zu beschreiben. Man beschreibt dabei jede einzelne Stufe durch eine Matrix, in der die benötigten Ausgangsprodukte angegeben werden. Zur besseren Übersicht stellt man den Prozess auch graphisch dar, in einem so genannten Gozinthograph
Beschreibt man jetzt die benötigten Materialien auf den einzelnen Stufen durch Matrizen, erhält man die folgenden drei Matrizen
Man kann diese Matrizen allerdings nur anwenden, wenn es keine Überschneidungen zwischen den Stufen gibt, d.h. für die Endprodukte jeder Stufe nur die jeweiligen Ausgangsprodukte verwendet werden
R1
R2
R3
R4
Z1
Z2
Z3
P1
P2
P3
P4
E1
E2
0
86
4
7
9
88
5
5 4
4
9
1
16
6
5
20
2
2
2
4
84
5
2
5
9
9
2
Abb. 1
1 2 3
1
2
3
4
0 8 6
4 7 9
8 8 5
5 4 4
Z Z Z
R
R
R
R
1 2 3 4
1
2
3
9 1 1 6
6 5 2 0
2 2 2 4
P P P P
Z
Z
Z
1 2
1
2
3
4
8 4
5 2
5 9
9 2
E E
P
P
P
P

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 9
Will man jetzt aus einer bestimmten Anzahl Endprodukte die benötigten Anfangsprodukte bestimmen, ist es relativ viel Aufwand, weil man gleich drei Rechnungen nacheinander durchführen muss. Es ist deshalb sinnvoll, die gesamte Produktion zunächst durch eine Matrix zu beschreiben. Dazu muss man nur alle Matrizen in der Reihenfolge der Produktionsstufen multiplizieren.
1 2
1
2
3
4
0 8 6 8 4
9 1 1 6 1096 6444 7 9 5 2
6 5 2 0 1773 9428 8 5 5 9
2 2 2 4 2112 10785 4 4 9 2
1300 655
E E
R
R
R
R
⋅ ⋅ =
Will man nur einen Teil des Produktionsprozesses angeben, multipliziert man nur die Matrizen in diesem Teil des Prozesses
Die folgende Gleichung ist dann der Ansatz, um alle Aufgabenstellungen lösen zu können
Matrix * Vektor des Endprodukte = Vektor der Anfangsprodukte
Mit der Matrix aus dem Prozess in Abb. 1 ergibt sich folgende Gleichung:
1
1 2
2 3
4
1096 644
1773 942
2112 1078
1300 655
r
e r
e r
r
⋅ =
Grundsätzlich gibt es zwei Aufgabenstellungen, die jeweils einen bestimmten Lösungsweg vorgeben
1. Die Matrix und die Anzahl der Endprodukte werden vollständig angegeben, gefragt wird nach der Anzahl der Ausgangsprodukte
Man muss dann einfach nur die Matrix mit dem Vektor der Endprodukte multiplizieren und erhält die Lösung
2. Die Anzahl der Ausgangsprodukte ist bekannt, es wird nach der Anzahl der Endprodukte gefragt oder es fehlen Elemente in der Matrix, es kann auch beides sein.
Man muss die Matrix per Hand mit dem Vektor der Endprodukte multiplizieren und dann das dadurch entstehende Gleichungssystem lösen
Bjarne Kolb Lernen für das Abitur – Matrizen Seite 10
R1
R2
R3
Z1
Z2
Z3
E1
E2
69
8
61 7
4
73
5
7
1
5
8
1
30
3
9
3
5
Abb. 2
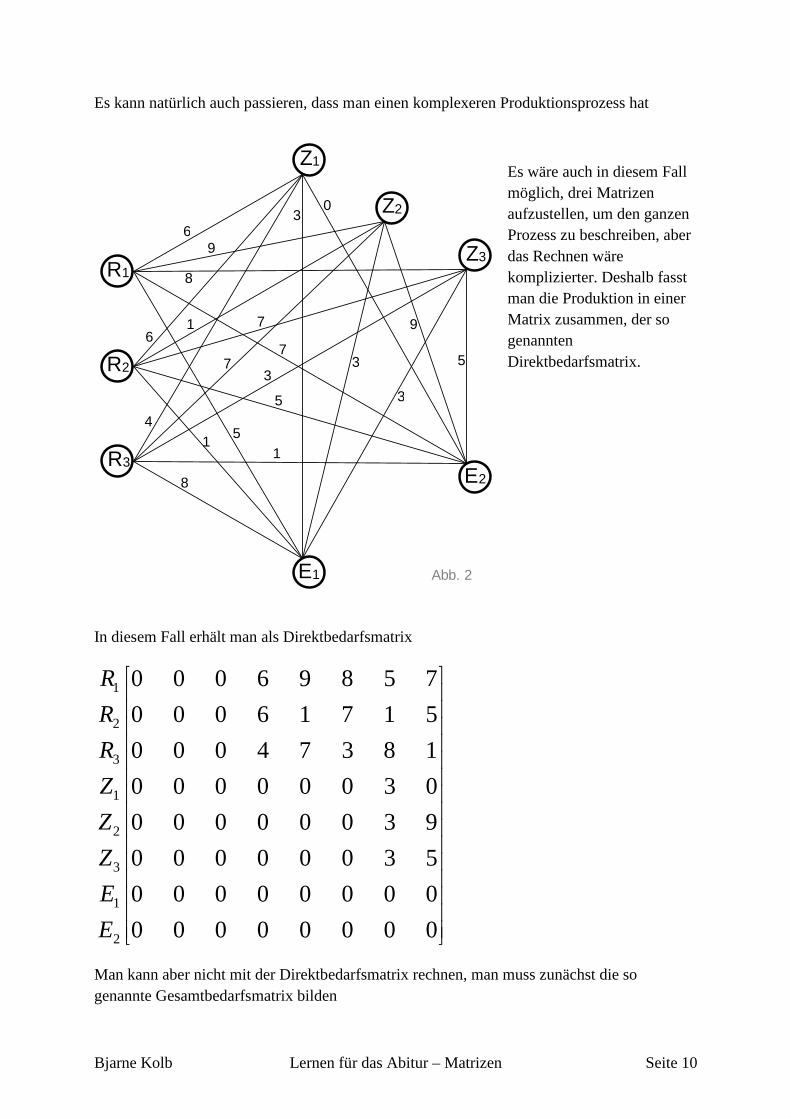
Es kann natürlich auch passieren, dass man einen komplexeren Produktionsprozess hat
Es wäre auch in diesem Fall möglich, drei Matrizen aufzustellen, um den ganzen Prozess zu beschreiben, aber das Rechnen wäre komplizierter. Deshalb fasst man die Produktion in einer Matrix zusammen, der so genannten Direktbedarfsmatrix.
In diesem Fall erhält man als Direktbedarfsmatrix
1
2
3
1
2
3
1
2
0 0 0 6 9 8 5 7
0 0 0 6 1 7 1 5
0 0 0 4 7 3 8 1
0 0 0 0 0 0 3 0
0 0 0 0 0 0 3 9
0 0 0 0 0 0 3 5
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
R
R
R
Z
Z
Z
E
E
Man kann aber nicht mit der Direktbedarfsmatrix rechnen, man muss zunächst die so genannte Gesamtbedarfsmatrix bilden

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 11
Dafür muss man erst die Direktbedarfsmatrix von der Einheitsmatrix der gleichen Größe abziehen und dann dazu die inverse Matrix bestimmen
( )1
G E D−
= −
1 0 0 6 9 8 74 128
0 1 0 6 1 7 43 49
0 0 1 4 7 3 50 79
0 0 0 1 0 0 3 0
0 0 0 0 1 0 3 9
0 0 0 0 0 1 3 5
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
G
=
Um den Bedarf der einzelnen Produkte zu berechnen, muss man diese Gesamtbedarfsmatrix mit einem Vektor multiplizieren, der alle bestellten Produkte angibt
1
2
01 0 0 6 9 8 74 128
00 1 0 6 1 7 43 49
00 0 1 4 7 3 50 79
00 0 0 1 0 0 3 0
00 0 0 0 1 0 3 9
00 0 0 0 0 1 3 5
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
v
e
e
= ⋅
�
Man kann auch ohne Probleme mit einberechnen, dass zusätzlich Ausgangs- oder Zwischenprodukte bestellt werden, man muss dann nur die Werte in den Vektor einsetzen

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 12
0 1
0 1
0 1
0 1
aa ba ca da
ab bb cb db
ac bc cc dc
ad bd cd dd
x x x x a a
x x x x b b
x x x x c c
x x x x d d
⋅ =
3
0 3
0 3
0 3
0 3
aa ba ca da
ab bb cb db
ac bc cc dc
ad bd cd dd
x x x x a a
x x x x b b
x x x x c c
x x x x d d
⋅ =
Übergangsmatrizen Übergangsmatrizen sind Matrizen, die Umverteilungen zwischen Merkmalen/Gruppen/Orten in einem bestimmten Zeitraum angeben. Dabei darf man den Begriff „Umverteilungen“ nicht zu wörtlich nehmen, es muss nicht wirklich ein Übergang zwischen den Gruppen stattfinden, nur die Anzahl ist entscheidend
aa ba ca da
ab bb cb db
ac bc cc dc
ad bd cd dd
A B C D
x x x xA
x x x xB
x x x xC
x x x xD
Bei den Übergangsmatrizen werden anders als bei der Materialverflechtung die Merkmale am Anfang in die Spalten und die Merkmale nach dem Zeitintervall in die Zeilen eingetragen. In
diesem Fall heißt das, dass z.B. der Wert bdx an, welcher Anteil des Merkmals B nach der
entsprechenden Zeit in das Merkmal D übergegangen ist. Ein wichtiges Merkmal von Übergangsmatrizen ist, dass keine negativen Werte vorkommen können
Die neue Verteilung kann man bestimmen, indem man die Übergangsmatrix mit der alten Verteilung multipliziert. Will man direkt die Verteilung nach mehreren Intervallen bestimmen, muss man statt der Matrix die entsprechende Potenz der Matrix verwenden
Zusätzlich zu der Verteilung nach einer bestimmten Anzahl an Zeitintervallen kann man die langfristige Entwicklung der Verteilung betrachten. Für diese Verteilung gibt es vier mögliche Varianten
1. Die Verteilung nähert sich einem Fixvektor an 2. Es liegt ein zyklischer Prozess vor 3. Die Gesamtanzahl nähert sich 0 an 4. Die Gesamtanzahl nimmt immer weiter zu
Es gibt eine besondere Art von Übergangsmatrizen, wenn die Summe der Werte in den Spalten jeweils 1 ergibt. Es liegt dann eine so genannte stochastische Matrix vor und die Gesamtanzahl verändert sich nicht
Bjarne Kolb Lernen für das Abitur – Matrizen Seite 13
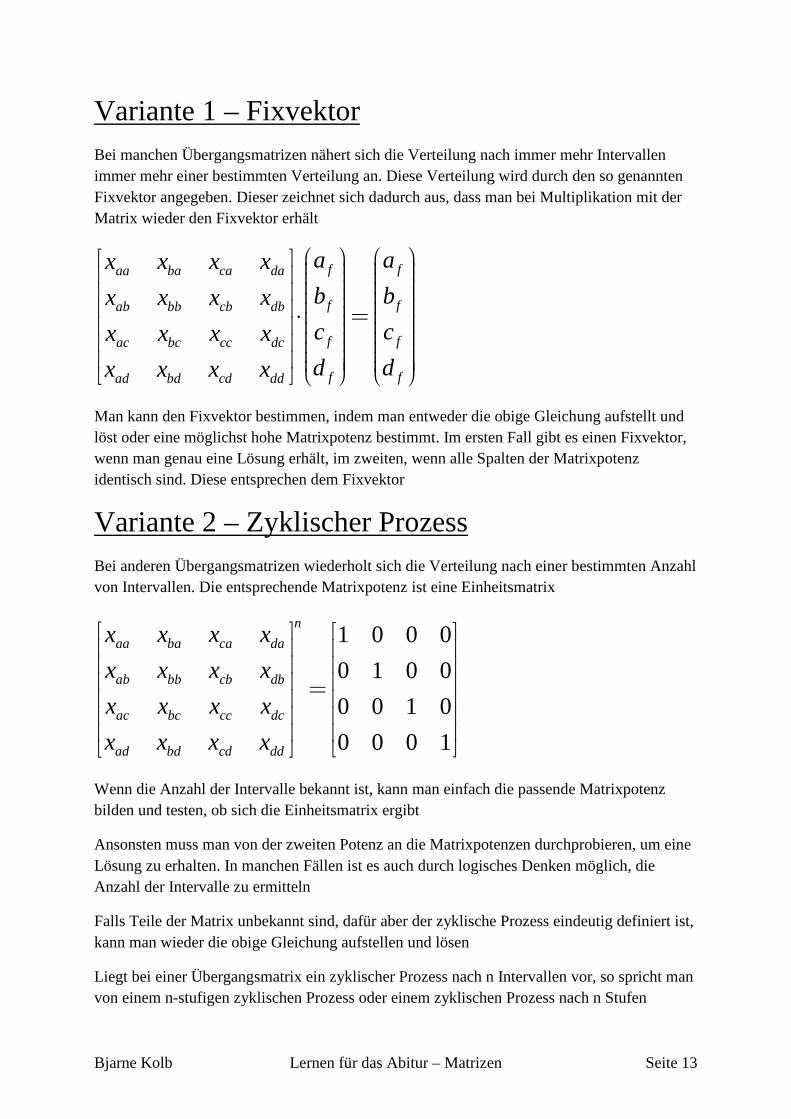
Variante 1 – Fixvektor Bei manchen Übergangsmatrizen nähert sich die Verteilung nach immer mehr Intervallen immer mehr einer bestimmten Verteilung an. Diese Verteilung wird durch den so genannten Fixvektor angegeben. Dieser zeichnet sich dadurch aus, dass man bei Multiplikation mit der Matrix wieder den Fixvektor erhält
f faa ba ca da
f fab bb cb db
f fac bc cc dc
f fad bd cd dd
a ax x x x
b bx x x x
c cx x x x
d dx x x x
⋅ =
Man kann den Fixvektor bestimmen, indem man entweder die obige Gleichung aufstellt und löst oder eine möglichst hohe Matrixpotenz bestimmt. Im ersten Fall gibt es einen Fixvektor, wenn man genau eine Lösung erhält, im zweiten, wenn alle Spalten der Matrixpotenz identisch sind. Diese entsprechen dem Fixvektor
Variante 2 – Zyklischer Prozess Bei anderen Übergangsmatrizen wiederholt sich die Verteilung nach einer bestimmten Anzahl von Intervallen. Die entsprechende Matrixpotenz ist eine Einheitsmatrix
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
n
aa ba ca da
ab bb cb db
ac bc cc dc
ad bd cd dd
x x x x
x x x x
x x x x
x x x x
=
Wenn die Anzahl der Intervalle bekannt ist, kann man einfach die passende Matrixpotenz bilden und testen, ob sich die Einheitsmatrix ergibt
Ansonsten muss man von der zweiten Potenz an die Matrixpotenzen durchprobieren, um eine Lösung zu erhalten. In manchen Fällen ist es auch durch logisches Denken möglich, die Anzahl der Intervalle zu ermitteln
Falls Teile der Matrix unbekannt sind, dafür aber der zyklische Prozess eindeutig definiert ist, kann man wieder die obige Gleichung aufstellen und lösen
Liegt bei einer Übergangsmatrix ein zyklischer Prozess nach n Intervallen vor, so spricht man von einem n-stufigen zyklischen Prozess oder einem zyklischen Prozess nach n Stufen

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 14
0,7 0,4
0,3 0,6
A B
A
B
Variante 3 – Zerfall Wenn die Summe der Anzahlen der einzelnen Merkmale immer weiter abnimmt, spricht man von einem Zerfall. Die Entwicklung ist sehr ähnlich zu einer Entwicklung mit Fixvektor, als Fixvektor hätte man in diesem Fall den Nullvektor. Im Gegensatz zu den anderen Fällen spricht man in diesem allerdings nicht von einem Fixvektor. Den Zerfall kann man in den meisten Fällen nur an der langfristigen Entwicklung der Verteilung erkennen
Variante 4 – Expansion Die letzte Variante ist die Expansion, wenn die Gesamtanzahl der Verteilung immer weiter zunimmt. Erkennen kann man es an der langfristigen Entwicklung der Verteilung oder man zeigt die Expansion, indem man die anderen Varianten ausschließt
Die Verteilung ändert sich zwar immer weiter, aber es pendelt sich meistens nach einer gewissen Zeit ein festes Verhältnis zwischen den Merkmalen ein. Dieses kann man ähnlich der Bestimmung des Fixvektors mit folgender Gleichung bestimmen:
f faa ba ca da
f fab bb cb db
f fac bc cc dc
f fad bd cd dd
a k ax x x x
b k bx x x x
c k cx x x x
d k dx x x x
⋅ ⋅ ⋅ = ⋅ ⋅
Übergangsdiagramme Wie bei der Materialverflechtung kann man sich eine Übergangsmatrix durch eine Graphik veranschaulichen
Die zu dem Übergangsdiagramm passende Matrix ist
A B0,7 0,6
0,3
0,4
Abb. 3

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 15
9 7 8 1 1 6 1
1 6 6 8 7 2 9 und
6 5 1 6 0 8 2
1 4 6 7 0 6 6
− − − − − − − − − − − − − − − −
8 95 8
und 7 27 7
7 0
− − −
Matrizenmultiplikation Multiplizieren Sie falls möglich die folgenden Multiplikationen schriftlich
a) b)
a)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( )
9 7 8 1 1 6 1
1 6 6 8 7 2 9
6 5 1 6 0 8 2
1 4 6 7 0 6 6
9 1 7 7 8 0 1 0 9 6 7 2 8 8 1 6 9 1 7 9 8 2 1 6
1 1 6 7 6 0 8 0 1 6 6 2 6 8 8 6 1 1 6 9 6 2 8 6
6 1 5 7 1 0
− − − − − − − ⋅ − − − − − − − − −
⋅ − − ⋅ + ⋅ + ⋅ ⋅ − − ⋅ − + ⋅ + ⋅ − ⋅ − − ⋅ − + ⋅ − + ⋅ −
− ⋅ − + ⋅ + ⋅ + ⋅ − ⋅ − + ⋅ − + ⋅ + ⋅ − − ⋅ − + ⋅ − + ⋅ − + ⋅ −=
⋅ − − ⋅ + ⋅ − ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
6 0 6 6 5 2 1 8 6 6 6 1 5 9 1 2 6 6
1 1 4 7 6 0 7 0 1 6 4 2 6 8 7 6 1 1 4 9 6 2 7 6
9 49 54 14 64 6 9 63 16 6
1 42 6 12 48 48 1 54 12 48
6 35 36 10 8 36 6 45 2 36
1 28 6 8 4
⋅ ⋅ − − ⋅ − + ⋅ − ⋅ − ⋅ − − ⋅ − + ⋅ − − ⋅ − − ⋅ − − ⋅ − ⋅ − ⋅ − ⋅ − − ⋅ − − ⋅ − ⋅ − − ⋅ − − ⋅ − − ⋅ − − ⋅ −
− − − + + − − + − −
+ − + − − − −=− − − + + + − + − +
− + −
58 18 32
43 6 113
41 18 73
8 42 1 36 12 42 27 8 91
− − − = − + + + + −
1 6 1 9 7 8 1
7 2 9 1 6 6 8
0 8 2 6 5 1 6
0 6 6 1 4 6 7
− − − − − − − ⋅ − − − − − − − − −
Multiplikation nicht möglich
b)
8 95 8
7 27 7
7 0
− − ⋅ −
Multiplikation nicht möglich
( ) ( )
( ) ( )
( ) ( )
8 9 8 5 9 7 8 8 9 7 40 63 64 63 23 15 8
7 2 7 5 2 7 7 8 2 7 35 14 56 14 21 427 7
7 0 7 5 0 7 7 8 0 7 35 0 56 0 35 56
⋅ − + ⋅ ⋅ − + ⋅ − + − + − − − ⋅ = ⋅ − + ⋅ ⋅ − + ⋅ = − + − + = − − − − ⋅ − + ⋅ − ⋅ − + ⋅ + +

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 16
Inverse Matrizen
Bestimmen Sie die inverse Matrix zu
9 3 1
5 1 6
1 4 2
− − − − −
Man kann die inverse Matrix bestimmen, weil die Matrix mit der inversen Matrix multipliziert die Einheitsmatrix ergibt
1 2 3
1 2 3
1 2 3
1 1 1 2 2 2 3 3 3
1 1 1 2 2 2 3 3 3
1 1 1 2 2 2 3 3 3
9 3 1 1 0 0
5 1 6 0 1 0
1 4 2 0 0 1
9 3 1 9 3 1 9 3 1 1 0 0
5 1 6 5 1 6 5 1 6
1 4 2 1 4 2 1 4 2
a a a
b b b
c c c
a b c a b c a b c
a b c a b c a b c
a b c a b c a b c
− − − − ⋅ = − − + − − + − − + − − + − − + − − + − = − + − + − +
0 1 0
0 0 1
1 1 1
1 1 1
1 1 1
9 3 1 1
5 1 6 0
1 4 2 0
a b c
a b c
a b c
− + − =
− + − =
− + =
2 2 2
2 2 2
2 2 2
9 3 1 0
5 1 6 1
1 4 2 0
a b c
a b c
a b c
− + − =
− + − =
− + =
3 3 3
3 3 3
3 3 3
9 3 1 0
5 1 6 0
1 4 2 1
a b c
a b c
a b c
− + − =
− + − =
− + =
9 3 1 1
5 1 6 0
1 4 2 0
A
− − = − − −
9 3 1 0
5 1 6 1
1 4 2 0
A
− − = − − −
9 3 1 0
5 1 6 0
1 4 2 1
A
− − = − − −
( )
221 0 0
1914
0 1 019119
0 0 1191
rref A
− =
( )
21 0 0
19117
0 1 019133
0 0 1191
rref A
− = − −
( )
171 0 0
19149
0 1 01916
0 0 1191
rref A
− = −
1
1
1
22
1914
19119
191
a
b
c
=−
=
=
2
2
2
2
19117
19133
191
a
b
c
=−
=−
=−
3
3
3
17
19149
1916
191
a
b
c
=−
=−
=
1
22 2 17
191 191 1919 3 14 17 49
5 1 6191 191 191
1 4 219 33 6
191 191 191
−
− − − − − − − = − − − −

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 17
6 5 9 5 7
2 3 5 3 8
4 9 3 6 20
3 1 8 9 47
8 3 6 30
a b c d
a b c d
a b c d
a b c d
b c d
− + + =−
− + + =
− − + =−
− − − + =−
− − =−
1 2 3 4
1 4
1 2 3 4
3 4 6 5 19
8 5 54
2 6 6 2 30
x x x x
x x
x x x x
+ + + =
− =−
− − − =−
9 5 9 161
3 4 1 8 90
1 1 6 7 13
7 4 9 8 50
1 3 5 6 101
b c d
a b c d
a b c d
a b c d
a b c d
− + + =
− + − − =−
− − + − =−
− − − + =
− + − − =−
0 9 5 9 161 1 1 6 7 13 1 1 6 7 13
3 4 1 8 90 3 4 1 8 90 3 0 7 19 13 51
1 1 6 7 13 0 9 5 9 161 0 9 5 9 161
7 4 9 8 50 7 4 9 8 50 7 0 3 51 57 141
1 3 5 6 101 1 3 5 6 101 0 4 11 1
A C
B A B
C A
D A D
E A E
− − − − − − − − − − − − + − − ⇒ ⇒− − − − − − − − − − − − + − − − − − − − − − + − − 88
1 1 6 7 13 1 1 6 7 13 1 1 6 7 13
0 3 51 57 141 :3 0 1 17 19 47 0 1 17 19 47
0 9 5 9 161 0 9 5 9 161 9 0 0 148 180 5
0 7 19 13 51 0 7 19 13 51 7
0 4 11 1 88 0 4 11 1 88 4
D
B
B C
B D
B E
− − − − − − ⇒ ⇒ ⇒− − + − − − − − − − − − − −
84
0 0 100 120 380
0 0 57 75 276
1 1 6 7 13 1 1 6 7 13
0 1 17 19 47 0 1 17 19 47
0 0 100 120 380 :100 0 0 1 1,2 3,8
0 0 148 180 584 : 4 0 0 37 45 146
0 0 57 75 276 :3 0 0 19 25 92
D
C
− − −
− − − − ⇒ ⇒− − − − − − − −
37
19
1 1 6 7 13 1 1 6 7 131 1 6 7 13 7
0 1 17 19 47 0 1 17 19 470 1 17 19 47
0 0 1 1,2 3,8 0 0 1 1,2 3,80 0 1 1,2 3,8
0 0 0 0,6 5,4 : 0,6 0 0 0 1 90 0 0 1 9
0 0 0 2,2 19,8 : 2,2 0 0 0 1 9
C D
C E
A D
+
+
− − − − − − − ⇒ ⇒ ⇒− − − − − −
19
1,2
1 1 6 0 50 6 1 1 0 0 8 1 0 0 0 3 3
0 1 17 0 124 17 0 1 0 0 5 0 1 0 0 5 5
0 0 1 0 7 0 0 1 0 7 0 0 1 0 7 7
0 0 0 1 9 0 0 0 1 9 0 0 0 1 9 9
B D
C D
A C A B a
B C b
c
d
−
+
− − + − − − =− − − + − − =− ⇒ ⇒ ⇒ ⇒ = =
Gleichungssysteme lösen – Gauß-Algorithmus Lösen Sie die folgenden Gleichungssysteme ausführlich ohne Taschenrechner
a) b) c)
a)
b)
3 4 6 5 19 2 6 6 2 30 : 2 1 3 3 1 15
8 0 0 5 54 8 0 0 5 54 8 0 0 5 54 8
2 6 6 2 30 3 4 6 5 19 3 4 6 5 19 3
C
B A
A C A
− − − − − − − − − − ⇒ − − ⇒ − − − − − − − −

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 18
1 3 3 1 15 1 3 3 1 15 1 3 3 1 15
0 24 24 3 66 : 24 0 1 1 0,125 2,75 0 1 1 0,125 2,75
0 13 15 8 64 0 13 15 8 64 13 0 0 2 6,375 28,25 : 2
1 3 3 1 15 3 1 3 0
0 1 1 0,125 2,75
0 0 1 3,1875 14,125
C B
A C
B C
− − − − − − − − − − − − ⇒ ⇒ −
− − − − + − − ⇒
8,5625 27,375 3
0 1 0 3,0625 11,375
0 0 1 3,1875 14,125
5 271 0 0
8 41 0 0 0,625 6,7549 91
0 1 0 3,0625 11,375 0 1 016 8
0 0 1 3,1875 14,12551 113
0 0 116 8
A B + − −
− − − − − − ⇒ − −
6 5 9 5 7 2 3 5 3 8 : 2 1 1,5 2,5 1,5 4
2 3 5 3 8 6 5 9 5 7 6 5 9 5 7
4 9 3 6 20 4 9 3 6 20 4 9 3 6 20
3 1 8 9 47 3 1 8 9 47 3 1 8 9 47
0 8 3 6 30 0 8 3 6 30 0 8 3 6 30
B
A
− − − − − − − − − ⇒ ⇒− − − − − − − − − − − − − − − − − − − − − − − − − − − − − −
( )
6
4
3
1 1,5 2,5 1,5 4 1 1,5 2,5 1,5 4
0 4 6 4 31 : 4 0 1 1,5 1 7,75
0 3 13 0 36 0 3 13 0 36 3
0 5,5 0,5 13,5 35 0 5,5 0,5 13,5 35 5,5
0 8 3 6 30 0 8 3 6 30 8
1 1,5 2,5 1,5 4
0 1
A B
A C
A D
C B
B D
E B
−
−
+
− − − − − − − ⇒ ⇒ − − − − − − − + − − − − − − −
−
−
⇒
1 1,5 2,5 1,5 4
1,5 1 7,75 0 1 1,5 1 7,75
0 0 17,5 3 59,25 0 0 9 2 32 :9
0 0 8,75 8 77,625 0 0 8,75 8 77,625
0 0 9 2 32 0 0 17,5 3 59,25
1 1,5 2,5 1,5 4
0 1 1,5 1 7,75
2 320 0 1
9 90 0 8,75 8 77,625
0
E
C
− − − − − − ⇒ − − − −
−
− − −
⇒
− −
1 1,5 2,5 1,5 4
0 1 1,5 1 7,75
2 320 0 1
9 9179 3349
0 0 08,75 18 7217,50 17,5 3 59,25 8 107
0 0 09 36
C D
C E
− − − − ⇒ − + −
c)
Nach der vierten Gleichung hat die Variable d ein negatives Vorzeichen, nach der fünften Gleichung aber ein positives. Das ergibt einen Widerspruch und das Gleichungssystem hat keine Lösung

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 19
Materialverflechtung Stellen Sie die Matrix auf, die den Rohstoffbedarf für die Endprodukte angibt. Verwenden Sie dabei die Informationen des Gozinthographen. Berechnen Sie dann den Rohstoffbedarf für eine Bestellung von 10 Einheiten E1 und 5 Einheiten E2.
Nach der Produktion sind noch folgende Mengen der Rohstoffe vorhanden: 10471-fach R1, 13418-fach R2, 8117-fach R3, 11581-fach R4 und 9875-fach R5. Bestimmen Sie, wie viele der Endprodukte hergestellt werden können, wenn die Rohstoffe vollständig aufgebraucht werden sollen.
Um mehr Gewinn zu erzielen, wird die Zusammensetzung der Produkte leicht geändert. Dadurch ändern sich die benötigten Mengen an R1 für E2 und an R2 für E1. Bestimmen Sie diese Werte mit Hilfe der Information, dass für 10 Einheiten E1 und 20 Einheiten E2 folgende Rohstoffe benötigt werden:
19990
20000
13020
18570
15860
rv
=
R1
R2
R3
R4
R5
Z1
Z2
Z3
P1
P2
P3
P4
E1
E2
Abb. 4
6
15
4
46
71
3
2 8
3
1 3
5
1
32
4
4
2
2
6
8
5
8
6
7
1
3
2
9 3

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 20
Zunächst muss man die Matrizen für die einzelnen Stufen aufstellen
1 2 3
1
2
3
4
5
6 1 5
4 4 6
7 1 3
2 8 3
1 3 5
Z Z Z
R
R
R
R
R
1 2 3 4
1
2
3
1 0 3 2
4 4 2 0
2 6 8 5
P P P P
Z
Z
Z
1 2
1
2
3
4
8 6
7 1
3 2
9 3
E E
P
P
P
P
Durch Multiplikation erhält man dann die gesuchte Matrix
6 1 5 911 3858 6
1 0 3 24 4 6 1166 4947 1
4 4 2 07 1 3 692 3053 2
2 6 8 52 8 3 979 4399 3
1 3 5 868 359
⋅ ⋅ =
Multipliziert man diese Matrix dann mit dem Bestellvektor, erhält man die Anzahl der benötigten Rohstoffe
911 385 11035
1166 494 1413010
692 305 84455
979 439 11985
868 359 10475
⋅ =
Auch für die Bestimmung der Menge der Endprodukte kann man die Gleichung aufstellen
911 385 10471 911 385 10471
1166 494 13418 1166 494 13418
692 305 8117 692 305 8117
979 439 11581 979 439 11581
868 359 9875 868 359 987
a b
a ba
a bb
a b
a b
+ = + = ⋅ = ⇔ + = + = + =
911 385 10471
1166 494 13418
692 305 8117
979 439 11581
5 868 359 9875
⇒
Weil die Funktion rref nicht bei Matrizen mit mehr Zeilen als Spalten funktioniert, muss man die Matrix um zwei leere Spalten ergänzen
911 385 0 0 10471 1 0 0 0 6
1166 494 0 0 13418 0 1 0 0 13
692 305 0 0 8117 0 0 0 0 0
979 439 0 0 11581 0 0 0 0 0
868 359 0 0 9875 0 0 0 0 0
rref
=
Man kann also 6 Einheiten E1 und 13 Einheiten E2 herstellen

Bjarne Kolb Lernen für das Abitur – Matrizen Seite 21
Nach der Änderung der Zusammensetzung ergibt sich folgende Rohstoff-Endprodukt-Matrix
911
494
692 305
979 439
868 359
b
a
Stellt man wieder die Gleichung Matrix * Bestellvektor = Rohstoffvektor, erhält man
911 19990
494 2000010
692 305 1302020
979 439 18570
868 359 15860
9110 20
10 9880
6920 6100
9790 8780
8680 7180
b
a
b
a
⋅ = + + + + +
19990
20000
13020
18570
15860
20 9110 19990
10 9880 20000
13020 13020
18570 18570
15860 15860
20 10880
10 10120
1012
544
b
a
b
a
a
b
=
+ =
+ =
=
=
=
=
=
=
=
Für die Matrix bedeutet das:
911 544
1012 494
692 305
979 439
868 359

Bjarne Kolb
Analysis
Funktions-untersuchung
Funktionsschar
Ableitung
Stammfunktion
Lernen für das Abitur

Bjarne Kolb Lernen für das Abitur – Funktionen
Inhalt
- Funktionsuntersuchung Seite 3 - Funktionsscharen Seite 7 - Ableitungsregeln Seite 9 - Herleitungen Seite 12 - Beispielrechnungen Seite 19

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 3
-2 -1 1 2 3 4 5
-3
-2
-1
1
2
x
y
monoton steigend
monoton fallend
Nullstelle
Tiefpf unkt
Nullstelle Hochpunkt
Abb. 1
-2 -1 1 2 3 4 5
-3
-2
-1
1
2
x
y
Abb. 2
rechtsgekrümmtlinksgekrümmt
Wendepunkt
Funktionsuntersuchung Unter einer Funktionsuntersuchung (oder auch Kurvendiskussion) versteht man die Analyse einer Funktion im Hinblick auf Verlauf und besondere Punkte des Funktionsgraphen
Als besondere Punkte werden dabei die Schnittpunkte mit den Koordinatenachsen (Nullstellen, Y-Achsenabschnitt), Extrempunkte (Hoch- und Tiefpunkte), Sattelpunkte und Wendepunkte gesehen. Theoretisch kann man die Funktion auch noch auf Flachpunkte untersuchen, aber die Flachpunkte werden so gut wie nie verlangt, deswegen muss man diese Bestimmung nicht unbedingt beherrschen
Zu dem Verlauf werden Steigungsverhalten (steigend oder fallend) und Krümmungsverhalten (links- oder rechtsgekrümmt) sowie das Verhalten der Funktion bei sehr großen und sehr kleinen X-Werten (Funktionswerte für x→±∞ ) gezählt
Wenn man eine Funktion untersucht, sollte man immer zuerst mit den besonderen Punkten anfangen, weil man sich anhand der Extrempunkte das Steigungsverhalten und anhand der Wendepunkte das Krümmungsverhalten leichter überlegen kann. Am einfachsten wird es, wenn man sich an dieser Liste orientiert
1. Nullstellen 2. Y-Achsenabschnitt 3. Extrem- und Sattelpunkte 4. Wendepunkte 5. Steigungsverhalten 6. Krümmungsverhalten 7. Verlauf für x→±∞
Bei der Untersuchung der Funktion sollte man darauf achten
• Möglichst nur zu rechnen, wenn es argumentativ nicht möglich ist • Die Rechnungen zu begründen
• Die gesuchten Punkte zu bestimmen, nicht nur die X-Werte • Nicht mit „Sieht man doch“ oder ähnlichen Ausdrücken zu argumentieren

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 4
1. Nullstellen
Für die Bestimmung der Nullstellen muss man die Funktion nur mit 0 gleichsetzen
( ) 0f x =
und dann die Gleichung nach x umstellen. Wichtig ist dabei, dass man nicht durch x teilen darf, sondern ausklammern muss. Dann kann man nach der Regel, dass ein Produkt nur gleich 0 sein kann, wenn einer der Faktoren gleich 0 ist, einzeln weiterrechnen. Quadratische Gleichungen sollte man, wenn Ausklammern nicht möglich ist, mit der pq-Formel berechnen. Wenn die Nutzung des GTR nicht untersagt wird, kann man die Nullstellen auch mit |2nd|CALC| 2:zero bestimmen lassen. Dabei werden Punkte, an denen der Graph die X-Achse nur berührt, allerdings nicht erkannt
2. Y-Achsenabschnitt
Der Y-Achsenabschnitt ist der Funktionswert der Funktion an der Stelle x=0, deswegen muss man nur f(0) berechnen
3. Extrem- und Sattelpunkte
Die Extremstellen kann man bestimmen, indem man zunächst nach der notwendigen Bedingung, dass die Steigung 0 betragen muss, die Nullstellen der ersten Ableitung bestimmt.
Die ermittelten Stellen können dabei entweder Extrem- oder Sattelstellen sein. Um die tatsächlich vorliegenden Punkte herauszufinden, hat man drei verschiedene Wege
A Argumentativ
Man kann anhand bekannter Eigenschaften der betrachteten Funktionen die Art des Extrempunktes/Sattelpunktes begründen (z.B. kann es bei Funktionen dritten Grades nur entweder einen Sattelpunkt oder zwei Extrempunkte geben)
B Rechnerisch – Vorzeichenwechselkriterium
Man kann die Art des Extrempunktes auch daran erkennen, ob ein Vorzeichenwechsel in der Steigung, also der ersten Ableitung vorliegt. Dazu bestimmt man links und rechts des gesuchten Punktes jeweils einen Wert der ersten Ableitung. Man muss dabei darauf achten, dass zwischen den gewählten Punkten und dem gesuchten Punkt keine weitere Extremstelle liegt. Um sich unnötige Rechnungen zu ersparen, bestimmt man zwischen zwei möglichen Extrempunkten nur einen Punkt und verwendet ihn für die Bestimmung beider Stellen. Das Ergebnis kann man folgendermaßen interpretieren:
Vorzeichenwechsel von + nach - => Hochpunkt Vorzeichenwechsel von – nach + => Tiefpunkt kein Vorzeichenwechsel => Sattelpunkt

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 5
C Rechnerisch – Werte der zweiten Ableitung
In den meisten Fällen kann man sich noch mehr Rechnungen sparen, indem man anstatt eines Vorzeichenwechsels der ersten Ableitung die Werte der zweiten Ableitung an den möglichen Extremstellen bestimmt. Ist dieser Wert negativ, so liegt ein Hochpunkt vor, bei einem positiven Wert hat man einen Tiefpunkt. Ist die zweite Ableitung gleich 0, liegt meistens ein Sattelpunkt vor, allerdings kann es in einigen Fällen auch trotzdem ein Extrempunkt sein, deswegen muss man wieder auf das Vorzeichenwechselkriterium zurückgreifen
Unabhängig davon, mit welchem Verfahren man die Extrem- und Sattelpunkte bestimmt hat, muss man jetzt noch die Funktionswerte an diesen Stellen bestimmen, wenn nicht die Extremstellen, sondern die Extrempunkte gesucht sind
4. Wendepunkte
Die Wendepunkte kann man genauso wie die Extrempunkte argumentativ anhand von Besonderheiten des Funktionstyps bestimmen. Alternativ kann man wieder über einen Vorzeichenwechsel, diesmal in der zweiten Ableitung, zum Ziel kommen. Will man sich Rechnungen sparen, kann man die Werte der dritten Ableitung berechnen. Ist diese ungleich 0, liegt ein Wendepunkt vor, andernfalls muss man wieder mit dem Vorzeichenwechsel arbeiten. Auch bei den Wendestellen muss man wieder die Funktionswerte bestimmen, um die Wendepunkte zu erhalten
5. Steigungsverhalten
Wenn man die Extrempunkte bestimmt hat, kann man das Steigungsverhalten leicht angeben:
Der Graph steigt
- von einem Tiefpunkt zu einem Hochpunkt - bei x→−∞ , wenn der Extrempunkt mit dem kleinsten X-Wert ein Hochpunkt ist - bei x→∞ , wenn der Extrempunkt mit dem größten X-Wert ein Tiefpunkt ist
Der Graph fällt
- von einem Hochpunkt zu einem Tiefpunkt - bei x→−∞ , wenn der Extrempunkt mit dem kleinsten X-Wert ein Tiefpunkt ist - bei x→∞ , wenn der Extrempunkt mit dem größten X-Wert ein Hochpunkt ist
Liegt in dem jeweils betrachteten Intervall kein Sattelpunkt, steigt bzw. fällt der Graph sogar streng monoton

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 6
6. Krümmungsverhalten
Jede Funktion hat immer zwischen zwei Wendepunkten ein einheitliches Krümmungsverhalten. Um die Richtung der Krümmung zu bestimmen, kann man in dem Bereich einen Wert der zweiten Ableitung bestimmen, ist dieser positiv, liegt eine Linkskrümmung vor, bei einem negativen Wert eine Rechtskrümmung.
Die Rechnung kann man sich sparen, wenn in dem jeweiligen Bereich ein Extrempunkt liegt. Bei einem Hochpunkt hat man immer eine Rechtskrümmung vorliegen, bei einem Tiefpunkt eine Linkskrümmung
7. Verlauf für x→±∞
Den Verlauf der Funktion für sehr kleine und sehr große X-Werte kann man bestimmen, indem man den Grenzwert der Funktionswerte für x→−∞und x→∞bestimmt. Dazu muss man zunächst überlegen, wie sich die einzelnen Faktoren der Funktion bei der Grenzwertbestimmung verhalten würden. Danach kommt der anspruchsvollere Teil, man muss entscheiden, welcher dieser Faktoren den größten Einfluss auf den Verlauf des Graphen hat. Dabei kann man sagen, dass höhere Potenzen von x einen größeren Einfluss haben als niedrigere Potenzen. Potenzen mit x im Exponenten haben einen größeren Einfluss als alle Potenzen von x
Es gibt insgesamt nur drei Möglichkeiten, wie der Graph sich in den Randbereichen verhält. Er kann im Positiven oder im Negativen gegen unendlich laufen oder sich einem bestimmten Wert, meistens 0, annähern

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 7
Funktionsscharen Funktionsscharen, das klingt nach einem sehr komplizierten und schwer verständlichem Thema. Grundlegend unterscheiden sich Funktionsscharen aber kaum von normalen Funktionen. Der einzige Unterschied besteht darin, dass in Funktionsscharen neben der Variablen noch ein weiterer Parameter auftritt. Setzt man für diesen Parameter verschiedene Werte ein, erhält man einzelne der unendlich vielen Funktionen, die zu einer Funktionsschar gehören
Man kennzeichnet eine Funktionsschar mit dem Parameter als Index, um sie von normalen Funktionen abzugrenzen
( ) 2kf x x k= −
Indem man den Parameter k durch einen Wert ersetzt (auch im Index), erhält man einzelne Funktionen
( )
( )
( )
22
20
23
2
3
f x x
f x x
f x x−
= −
=
= +
Die Funktionsscharen kann man wie alle anderen Funktionen mit einer Kurvendiskussion auf charakteristische Punkte und den Verlauf untersuchen. Dabei muss man aber eine Besonderheit von Funktionsscharen beachten. Es kann passieren, dass sich z.B. bei negativen und positiven Werten des Parameters ein vollständig anderer Verlauf zeigt. In diesem Fall muss man eine Fallunterscheidung durchführen und den Verlauf für positive und negative Werte einzeln ermitteln. Besonders häufig wird diese Fallunterscheidung bei Extrem- und
Wendepunkten benötigt. Zum Beispiel hat ( ) 4 2kg x x kx= − für 0k ≤ genau einen Tiefpunkt
und für 0k> zwei Tiefpunkte und einen Hochpunkt
Wenn die Extrem- oder Wendepunkte (wie bei der Funktion g) von dem Parameter (hier k) abhängen, so hat die Funktionsschar nicht einen dieser Punkte an einer bestimmten Stelle, sondern viele, die jeweils bei einem anderen Wert für den Parameter auftreten. Diese Punkte liegen dann wieder auf einer Kurve (oder Geraden), die man durch eine Funktion angeben kann, die so genannte Ortslinie des Punktes
Dazu setzt man die X-Koordinate dieses Punktes zunächst mit x gleich ( xx p= , wenn der
Punkt ( )x yP p p ist) und stellt diese Gleichung nach dem Parameter (in dem Fall k) um. Dann
setzt man die Y-Koordinate mit y gleich ( yy p= ) und setzt danach den zuvor ermittelten
Wert für den Parameter in diese Gleichung ein. Wenn man dann noch die Gleichung so weit wie möglich vereinfacht, erhält man die Funktion für die Ortslinie des entsprechenden Punktes. Um klar zu machen, dass es sich um eine Funktion handelt, wird das y= noch durch den Namen einer Funktion, z.B. t(x)=, ersetzt

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 8
Um vor der Funktionsuntersuchung schon eine grobe Vorstellung von dem Verlauf der Funktionen oder auch schon möglichen Fallunterscheidungen zu entwickeln, kann man sich einige der Funktionen zeichnen oder zeichnen lassen:
In diesem Fall wurden die oben bereits genannten Funktionen f2, f0 und f-3 gezeichnet und man kann jetzt schon vermuten, dass alle Funktionen dieser Funktionsschar einfach auf der Y-Achse verschobene, nach oben geöffnete Normalparabeln sind
Außerdem kann man sich überlegen, dass außer bei der Anzahl an Nullstellen keine Fallunterscheidung vorgenommen werden muss, weil die Funktionen (zumindest die gezeichneten, theoretisch könnte es Ausnahmen geben) alle genau einen Tiefpunkt und keinen Wendepunkt aufweisen
Bei der Funktionsschar gk zeigen sich dagegen deutliche Unterschiede im Verlauf. Die Funktionen verlaufen zwar alle durch den Ursprung, aber die Funktion g2 hat drei Extrempunkte und verläuft zum Teil unterhalb der X-Achse, während es bei g0 und g-2 nur einen Tiefpunkt im Ursprung gibt und die Funktionswerte nicht negativ werden. Deshalb muss man wahrscheinlich bei der Bestimmung aller charakteristischen Punkte zwischen den Fällen 0x≤ und 0x> unterscheiden
-3 -2 -1 1 2 3
-2
-1
1
2
3
4
5
6
7
8
9
10
x
y
f2f
f0f
f-f 3
Abb. 3
-2 -1,5 -1 -0,5 0,5 1 1,5 2
-1
1
2
3
4
5
6
7
8
x
y
g2
g0
g-2
Abb. 4

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 9
Ableitungen Für die Funktionsuntersuchungen muss man mit der ersten und zweiten, teilweise auch dritten Ableitung rechnen. Aber was ist die Ableitung überhaupt?
Die Ableitung einer Funktion in einem Punkt ist die Steigung der Funktion in diesem Punkt, die Ableitungsfunktion ist demnach die momentane Änderungsrate in allen Punkten einer Funktion
Weil man aber mit nur einem Punkt keine Steigung bestimmen kann, nähert man sich dieser Steigung durch Sekanten, die durch den gesuchten und einen naheliegenden Punkt verlaufen, an. Der zweite Punkt wird dabei immer weiter in Richtung des gesuchten Punktes verschoben, sodass man sich immer weiter einer Tangenten durch den gesuchten Punkt annähert. Die Steigung dieser Tangente entspricht dann der Steigung und damit der Ableitung in dem Punkt.
Die Ableitung ist also der Grenzwert von Sekantensteigungen, der die Steigung der Tangente durch den gesuchten Punkt ergibt.
Berechnen lässt sich die Ableitung mit Hilfe des Differenzialquotienten (mit der so genannten h-Methode):
( )( ) ( ) ( ) ( )
0 0
' lim limh h
f x h f x f x h f xf x
x h x h→ →
+ − + −= =
+ −
Da es aber sehr aufwendig ist, jede einzelne Funktion mit diesem Differenzialquotienten abzuleiten, gibt es Regeln, mit denen man Funktionen deutlich einfacher ableiten kann
Anfangen sollte man dabei bei den drei Grundfunktionen, aus denen alle Funktionen aufgebaut sind. (Nicht ganz alle, aber alle im Unterricht behandelten)
1. Potenzfunktionen
( ) ( ) 1'n nf x x f x n x −= ⇒ = ⋅
2. Die natürliche Exponentialfunktion
( ) ( )'x xf x e f x e= ⇒ =
3. Trigonometrische Funktionen
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
sin ' cos
cos ' sin
sin ' cos
cos ' sin
f x x f x x
f x x f x x
f x x f x x
f x x f x x
= ⇒ =
= ⇒ =−
=− ⇒ =−
=− ⇒ =

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 10
Jetzt kann man also einfache Potenzfunktionen ableiten, indem man den Exponenten als Faktor vor die Potenz stellt und ihn dann um 1 verringert, die e-Funktion, die man einfach übernehmen kann, und man kann trigonometrische Funktionen ableiten, bei denen ein Kreislauf zwischen sin, cos, –sin und –cos vorliegt. Weil aber nicht alle Funktionen so einfach aufgebaut sind, braucht man zusätzlich noch Regeln für die Kombinationen dieser Grundfunktionen. Die einfachsten sind dabei die Faktor- und die Summenregel
- Faktorregel
( ) ( ) ( ) ( )' 'f x k g x f x k g x= ⋅ ⇒ = ⋅
- Summenregel
( ) ( ) ( ) ( ) ( ) ( )' ' 'f x u x v x f x u x v x= + ⇒ = +
Ein Faktor vor der Funktion wird also beim Ableiten einfach übernommen, und die Ableitung einer Summe kann man bestimmen, indem man die Summe der einzelnen Ableitungen bildet. Die meisten Funktionen kann man mit diesen Regeln schon berechnen, aber es kann auch vorkommen, dass eine Funktion das Produkt zweier Faktoren ist, die man nicht einfach vorher verrechnen kann, z.B. x und sin(x). Für solche Fälle gibt es die Produktregel:
- Produktregel
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )' ' 'f x u x v x f x u x v x u x v x= ⋅ ⇒ = ⋅ + ⋅
Man kann also bei einem Produkt zweier Funktionen die Ableitung nicht einfach bestimmen, indem man die Ableitungen der einzelnen Funktionen multipliziert, sondern man muss die Ableitung der ersten Funktion mit der zweiten Funktion multiplizieren, dann muss man das Produkt der ersten Funktion und der Ableitung der zweiten Funktion ausrechnen und aufaddieren. Was muss man aber machen, wenn eine Funktion in der anderen enthalten ist, sich also nicht mehr einfach als Produkt oder Summe verschiedener Grundfunktionen schreiben lässt? In diesem Fall benötigt man eine weitere Regel, die Kettenregel
- Kettenregel
( ) ( )( ) ( ) ( ) ( )( )' ' 'f x u v x f x v x u v x= ⇒ = ⋅
Die Ableitung einer verketteten Funktion ist also das Produkt aus der inneren und der äußeren Ableitung. Eine letzte Regel gibt es noch, die man zwar eigentlich nicht benötigt, die aber die Berechnung verkürzt, die Quotientenregel
- Quotientenregel
( )( )
( )( )
( ) ( ) ( ) ( )
( )( )2
' ''
u x u x v x u x v xf x f x
v x v x
⋅ − ⋅= ⇒ =
Mit diesen Regeln kann man jetzt jede beliebige, differenzierbare Funktion ableiten

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 11
Stammfunktionen Ableitungen kann man mit diesen Regeln relativ einfach bestimmen, aber es kann natürlich auch passieren, dass man aufleiten statt ableiten muss. Dann stellt sich die Frage, welche dieser Regeln man (umgekehrt) auch für die Stammfunktion verwenden kann.
Regeln, die sich leicht umkehren lassen, sind Potenzregel, Faktorregel und Summenregel sowie die Ableitungen der e-Funktion und der trigonometrischen Funktionen
- Potenzregel
( ) ( ) 11
1n nf x x F x x C
n+= ⇒ = +
+
- Faktorregel
( ) ( ) ( ) ( )f x k g x F x k G x C= ⋅ ⇒ = ⋅ +
- Summenregel
( ) ( ) ( ) ( ) ( ) ( )f x u x v x F x U x V x= + ⇒ = +
- e-Funktion
( ) ( )x xf x e F x e C= ⇒ = +
- trigonometrische Funktionen
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
cos sin
sin cos
cos sin
sin cos
f x x F x x C
f x x F x x C
f x x F x x C
f x x F x x C
= ⇒ = +
=− ⇒ = +
=− ⇒ =− +
= ⇒ =− +
Die Produkt-, die Ketten- und die Quotientenregel lassen sich nicht einfach umkehren, man muss diese Funktionen durch Substitution aufleiten, was aber in der Schule nicht behandelt wird. Eine Ausnahme gibt es, eine verkettete Funktion mit einer linearen inneren Funktion kann man leicht aufleiten, mit der so genannten linearen Substitution
- Lineare Substitution
( ) ( ) ( ) ( )1
f x g mx b F x G mx b Cm
= + ⇒ = ⋅ + +
Mit den Regeln zur Bildung einer Stammfunktion kann man viele Funktionen aufleiten, allerdings bei weitem nicht alle

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 12
Herleiten und Beweisen Wenn man etwas herleiten oder beweisen muss, kann man sich an diesen Schritten orientieren:
1. Überlegung Was will man zeigen oder entwickeln?
2. Überlegung Welche Voraussetzungen hat man (Rechtwinkligkeit etc.)
3. Überlegung Welche mathematischen Definitionen/Sätze/Gesetze/Regeln könnte man verwenden
4. Notizen Erste Ansätze, den Beweis zu führen
5. Überlegung und Notizen Entwicklung des Beweises bzw. solange die Sätze/Definitionen umstellen und zusammenwürfeln, bis man auf die Lösung kommt
6. Reinschrift Formulieren der Zielsetzung
7. Überlegung und Notizen Korrekte Reihenfolge aufstellen und richtige Formulierung des Beweises finden
8. Reinschrift Verwendete Definitionen/Sätze/Gesetze/Regeln auflisten
9. Reinschrift Ausformulierung der Beweisführung/Herleitung
10. Reinschrift Bei Herleitungen noch einmal die entwickelte Formel aufschreiben, bei Beweisen das Ergebnis der Beweises notieren (Damit ist bewiesen, dass …)
Bei den folgenden Herleitungen werde ich aber nur die Schritte 6 und 8 bis 10 beachten, weil nur diese Reinschrift auch später im Abitur gewertet wird

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 13
Herleitung der Potenzregel – Zielsetzung
Herleitung der Ableitung für ( ) nf x x=
– Verwendete Sätze und Definitionen
Differenzialquotient
– Beweisführung Nach dem Differenzialquotienten ergibt sich für die Ableitung:
( )( ) ( ) ( )
0 0
' lim limn n
h h
f x h f x x h xf x
h h→ →
+ − + −= =
Den Term ( )n
x h+ kann man mit Hilfe des Binomialkoeffizienten umschreiben
( )
( )
( )
0 1 1 1 1 0
1 1
0
...0 1 1
...1 1
1' lim
n n n n n
n n n n n
n
h
n n n nx h x h x h x h x h
n n
n n nx h x x h x h h
n n
nx
f x
− −
− −
→
+ = ⋅ ⋅ + ⋅ ⋅ + + ⋅ ⋅ + ⋅ ⋅ −
+ = + ⋅ ⋅ + + ⋅ ⋅ + ⋅ −
+ =
( )
( )
1 1
1 1
0
1 2
0
...1
...1 1
'
' ...1 1
lim
lim
n n n n
n n n
h
n n
h
n nx h x h h x
n n
h
n n nx h x h h
n nf x
h
n n nf x x x h
n n
− −
− −
→
− −
→
⋅ ⋅ + + ⋅ ⋅ + ⋅ − −
⋅ ⋅ + + ⋅ ⋅ + ⋅ − =
= ⋅ + + ⋅ ⋅ + −
1nh −⋅
Durch die Grenzwertbildung laufen alle Summanden, in denen h auftritt, gegen 0, also mit Ausnahme des ersten alle Summanden
( ) 1 1 1' 01 1
n n nn nf x x x n x− − −
= ⋅ + = ⋅ = ⋅
– Ergebnis der Herleitung
Die Ableitung der Funktion ( ) nf x x= ist ( ) 1' nf x n x −= ⋅

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 14
Herleitung der Faktorregel – Zielsetzung
Herleitung der Ableitung für ( ) ( )f x k g x= ⋅
– Verwendete Sätze und Definitionen
Differenzialquotient
– Beweisführung Nach dem Differenzialquotienten ergibt sich für die Ableitung:
( )( ) ( ) ( ) ( )
( )( ) ( )( )
( )( ) ( )
( )( ) ( )
( ) ( )
0 0
0
0
0
'
'
'
'
' '
lim lim
lim
lim
lim
h h
h
h
h
f x h f x a g x h a g xf x
h h
a g x h g xf x
h
g x h g xf x a
h
g x h g xf x a
h
f x a g x
→ →
→
→
→
+ − ⋅ + − ⋅= =
⋅ + −=
+ − = ⋅
+ −= ⋅
= ⋅
– Ergebnis der Herleitung
Die Ableitung der Funktion ( ) ( )f x k g x= ⋅ ist ( ) ( )' 'f x k g x= ⋅

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 15
Herleitung der Summenregel – Zielsetzung
Herleitung der Ableitung für ( ) ( ) ( )f x u x v x= +
– Verwendete Sätze und Definitionen
Differenzialquotient
– Beweisführung Nach dem Differenzialquotienten ergibt sich für die Ableitung:
( )( ) ( ) ( ) ( )( ) ( ) ( )( )
( )( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( )
( ) ( ) ( )
0 0
0
0
0
0 0
'
'
'
'
'
' ' '
lim lim
lim
lim
lim
lim lim
h h
h
h
h
h h
u x h v x h u x v xf x h f xf x
h h
u x h v x h u x v xf x
h
u x h u x v x h v xf x
h
u x h u x v x h v xf x
h h
u x h u x v x h v xf x
h h
f x u x v x
→ →
→
→
→
→ →
+ + + − ++ −= =
+ + + − −=
+ − + + −=
+ − + − = +
+ − + −= +
= +
– Ergebnis der Herleitung
Die Ableitung der Funktion ( ) ( ) ( )f x u x v x= + ist ( ) ( ) ( )' ' 'f x u x v x= +

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 16
Herleitung der Produktregel – Zielsetzung
Herleitung der Ableitung für ( ) ( ) ( )f x u x v x= ⋅
– Verwendete Sätze und Definitionen
Differenzialquotient
– Beweisführung Nach dem Differenzialquotienten ergibt sich für die Ableitung:
( )( ) ( ) ( ) ( ) ( ) ( )
0 0
' lim limh h
f x h f x u x h v x h u x v xf x
h h→ →
+ − + ⋅ + − ⋅= =
Diesen Term kann man jetzt etwas umformen
( )( ) ( ) ( ) ( )
( )( )
( )( ) ( )
( )( )
( )( ) ( )
0 0
0 0
0 0 0
'
'
'
lim lim
lim lim
lim lim lim
h h
h h
h h h
u x h v x h u x v xf x
h h
u x h u x v xf x v x h
h h
u x h u x v xf x v x h
h h
→ →
→ →
→ → →
+ ⋅ + ⋅= −
+ ⋅ = ⋅ + −
+ ⋅= ⋅ + −
Der erste Grenzwert sieht dem Differenzialquotienten von ( )'u x ähnlich, deswegen
kann man das fehlende ( )u x− ergänzen
( )( ) ( ) ( )
( )( ) ( )
( )( ) ( )
( )( )
( )( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
0 0 0
0 0 0 0 0
0 0
0
0
'
'
' '
' '
' '
lim lim lim
lim lim lim lim lim
lim lim
lim
lim
h h h
h h h h h
h h
h
h
u x h u x u x u x v xf x v x h
h h
u x h u x u x u x v xf x v x h v x h
h h h
u x v x h u x v xf x u x v x
h h
u x v x h u x v xf x u x v x
h
v xf x u x v x u x
→ → →
→ → → → →
→ →
→
→
+ − + ⋅= ⋅ + −
+ − ⋅= ⋅ + + ⋅ + −
⋅ + ⋅= ⋅ + −
⋅ + − ⋅= ⋅ +
+= ⋅ + ⋅
( ) ( )
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )0
' ' ' 'limh
h v x
h
v x h v xf x u x v x u x u x v x u x v x
h→
−
+ −= ⋅ + ⋅ = ⋅ + ⋅
– Ergebnis der Herleitung
Die Ableitung der Funktion ( ) ( ) ( )f x u x v x= ⋅ ist ( ) ( ) ( ) ( ) ( )' ' 'f x u x v x u x v x= ⋅ + ⋅

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 17
Herleitung der Kettenregel – Zielsetzung
Herleitung der Ableitung für ( ) ( )( )f x u v x=
– Verwendete Sätze und Definitionen
Differenzialquotient
– Beweisführung Nach dem Differenzialquotienten ergibt sich für die Ableitung:
( )( ) ( ) ( )( ) ( )( )
0 0
' lim limh h
u v x h u v xf x h f xf x
h h→ →
+ −+ −= =
Um die Umformungen einfacher durchführen zu können, kann man die innere Funktion durch Variablen ersetzen
( )a v x= ( ) ( )b v x h v x= + −
Man erhält dann
( )( ) ( ) ( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( ) ( ) ( )
( )
0 0 0 0
0 0 0
'
' '
lim lim lim lim
lim lim lim
h h h h
h h h
u a b u a u a b u a u a b u ab bf x
h b h b h
u a b u a v x h v x u a b u af x v x
b h b
→ → → →
→ → →
+ − + − + − = = ⋅ = ⋅
+ − + − + −= ⋅ = ⋅
Wenn h gegen 0 läuft, läuft auch b gegen 0, weil man die Differenz aus zwei in immer kleinerem Abstand voneinander liegenden Funktionswerten bestimmt, im Grenzwertfall sogar aus denselben Funktionswerten. Aus diesem Grund kann man bei dem Grenzwert statt h auch b gegen 0 laufen lassen
( )( ) ( )
( )0
' 'limb
u a b u af x v x
b→
+ −= ⋅
Man hat einen Differenzialquotienten mit a statt x und b statt h. Daraus ergibt sich:
( ) ( ) ( )' ' 'f x u a v x= ⋅
Setzt man für a wieder ( )v x ein, erhält man:
( ) ( )( ) ( ) ( ) ( )( )' ' ' ' 'f x u v x v x v x u v x= ⋅ = ⋅
– Ergebnis der Herleitung
Die Ableitung der Funktion ( ) ( )( )f x u v x= ist ( ) ( ) ( )( )' ' 'f x v x u v x= ⋅

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 18
Herleitung der Quotientenregel – Zielsetzung
Herleitung der Ableitung für ( )( )
( )
u xf x
v x=
– Verwendete Sätze und Definitionen
Produktregel Kettenregel
– Beweisführung Die Funktion kann man zunächst umschreiben als
( ) ( )( )1
f x u xv x
= ⋅
Mit ( )( )1
g xv x
= erhält man
( ) ( ) ( )f x u x g x= ⋅
Diese Funktion kann man dann nach der Produktregel ableiten:
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( )( )
( )( ) ( )
'1' ' ' ' ' '
u xf x u x g x u x g x u x u x g x u x g x
v x v x= ⋅ + ⋅ = ⋅ + ⋅ = + ⋅
Die Ableitung von ( )g x kann man noch nicht direkt bestimmen, deswegen muss man
zunächst ( )'g x mit der Kettenregel bestimmen
( ) ( )( )( )
( )
( )( )2 2
'1' '
v xg x v x
v x v x
= ⋅ − =−
Setzt man diese Ableitung in die Ableitung der Funktion f ein, erhält man
( )( )
( )( )
( )
( )( )
( )
( )( )
( )
( )( )
( )
( )
( ) ( )
( )( )
( )( ) ( )
( )( )
( ) ( )
( )( )
( ) ( ) ( ) ( )
( )( )
2 2 2
2 2 2
' ' ' ' ' ''
' ' ' ''
u x v x u x v x u x u x v xf x u x u x
v x v x v xv x v x v x
u x v x u x v x u x v x u x v xf x
v x v x v x
⋅ = + ⋅ − = − ⋅ = −
⋅ ⋅ ⋅ − ⋅= − =
– Ergebnis der Herleitung
Die Ableitung der Funktion ( )( )
( )
u xf x
v x= ist ( )
( ) ( ) ( ) ( )
( )( )2
' ''
u x v x u x v xf x
v x
⋅ − ⋅=

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 19
Funktionsuntersuchung
Untersuchen Sie den Verlauf der Funktion ( ) 3 213
3f x x x x=− + + .
Am Anfang kann man die ersten drei (wenn man die Wendepunkte mit Vorzeichenwechsel überprüft, nur die ersten beiden) Ableitungen bilden:
( )
( )
3 2
2
13
3
' 2 3
f x x x x
f x x x
=− + +
=− + +
( )
( )
'' 2 2
''' 2
f x x
f x
=− +
=−
Nullstellen
( ) 3 2 2
2 2
2
1,2
1 10 3 0 3 0
3 3
10 oder 3 0 0 oder 3 9 0
3
3 30 oder 9 1,5 11,25
2 2
0 oder 1,5 11,25 4,85 oder 1,5 11,25 1,85
f x x x x x x x
x x x x x x
x x
x x x
= ⇔− + + = ⇔ − + + =
= − + + = ⇔ = − − =
− − = =− ± + = ±
= = + ≈ = − ≈−
Y-Achsenabschnitt
( )0 0 (Nullstelle)f =
Extrem- und Sattelpunkte
Extrem- und Sattelpunkte liegen bei Nullstellen der ersten Ableitung
( ) 2 2
2
1,2
' 0 2 3 0 2 3 0
2 23 1 4 1 2
2 2
3 oder 1
f x x x x x
x
x x
= ⇔− + + = ⇔ − − =
− − =− ± + = ± = ±
= =−
A Argumentativ
Eine Funktion dritten Grades kann entweder einen Sattelpunkt oder einen Tief- und einen Hochpunkt haben. Weil bei dieser Funktion zwei mögliche Stellen gibt, muss es also zwei Extrempunkte geben. Der Hochpunkt ist dabei die Stelle mit dem größeren Funktionswert, weil von einem Hochpunkt zu einem Tiefpunkt eine negative Steigung vorliegt

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 20
Damit gibt es einen Hochpunkt ( )3 9H und einen Tiefpunkt 5
13
T − −
B Rechnerisch – Vorzeichenwechselkriterium
Nach der hinreichenden Bedingung für einen Extrempunkt hat man bei einem Vorzeichenwechsel von + nach – einen Hochpunkt, bei einem Wechsel von – nach + dagegen einen Tiefpunkt. Liegt kein Vorzeichenwechsel vor, hat man einen Sattelpunkt
( ) ( ) ( )
( )
( )
2
2
2
' 2 2 2 2 3 4 4 3 5
' 0 0 2 0 3 0 0 3 3
' 4 4 2 4 3 16 8 3 5
f
f
f
− =− − + ⋅ − + =− − + =−
=− + ⋅ + = + + =
=− + ⋅ + =− + + =−
Nach den oben genannten Kriterien liegt bei x= –1 ein Tiefpunkt, bei x=3 ein Hochpunkt vor
Damit gibt es einen Hochpunkt ( )3 9H und einen Tiefpunkt 5
13
T − −
C Rechnerisch – Werte der zweiten Ableitung
Berechnet man an den möglichen Extremstellen die Werte der zweiten Ableitung, kann man meistens erkennen, ob ein Extrempunkt vorliegt. Ist die zweite Ableitung negativ, liegt dort ein Hochpunkt, ist sie positiv, liegt ein Tiefpunkt vor. Wenn die zweite Ableitung an der Stelle eine Nullstelle hat, muss man mit dem Vorzeichenwechselkriterium weiterarbeiten
( ) ( )
( )
'' 1 2 1 2 2 2 4
'' 3 2 3 2 6 2 4
f
f
− =− ⋅ − + = + =
=− ⋅ + =− + =−
Demnach liegt bei x= –1 ein Tiefpunkt, bei x=3 ein Hochpunkt
( ) ( ) ( ) ( )
( )
3 2
3 2
1 1 51 1 1 3 1 1 3
3 3 31
3 3 3 3 3 9 9 9 93
f
f
− =− ⋅ − + − + ⋅ − = + − =−
=− ⋅ + + ⋅ =− + + =
Damit gibt es einen Hochpunkt ( )3 9H und einen Tiefpunkt 5
13
T − −
( ) ( ) ( ) ( )
( )
3 2
3 2
1 1 51 1 1 3 1 1 3
3 3 31
3 3 3 3 3 9 9 9 93
f
f
− =− ⋅ − + − + ⋅ − = + − =−
=− ⋅ + + ⋅ =− + + =
( ) ( ) ( ) ( )
( )
3 2
3 2
1 1 51 1 1 3 1 1 3
3 3 31
3 3 3 3 3 9 9 9 93
f
f
− =− ⋅ − + − + ⋅ − = + − =−
=− ⋅ + + ⋅ =− + + =

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 21
Wendepunkte
Wendepunkte liegen bei Nullstellen der zweiten Ableitung
( )'' 0 2 2 0 2 2
1
f x x x
x
= ⇔− + = ⇔ =
=
A Argumentativ
Eine Funktion dritten Grades hat immer genau einen Wendepunkt. Deshalb muss bei x=1 ein Wendepunkt liegen
( ) 3 21 1 111 1 1 3 1 1 3
3 3 3f =− ⋅ + + ⋅ =− + + = Es gibt also einen Wendepunkt
111
3W
B Rechnerisch – Vorzeichenwechselkriterium
Nach der hinreichenden Bedingung für einen Wendepunkt gibt es einen Vorzeichenwechsel in der zweiten Ableitung
( )
( )
'' 0 2 0 2 0 2 2
'' 2 2 2 2 4 2 2
f
f
=− ⋅ + = + =
=− ⋅ + =− + =−
Damit ist bei x=1 ein Wendepunkt
( ) 3 21 1 111 1 1 3 1 1 3
3 3 3f =− ⋅ + + ⋅ =− + + = Es gibt also einen Wendepunkt
111
3W
C Rechnerisch – Werte der zweiten Ableitung
Wenn an der möglichen Wendestelle die dritte Ableitung ungleich 0 ist, liegt dort ein Wendepunkt. Ist die dritte Ableitung gleich 0, muss man wieder auf das Vorzeichenwechselkriterium zurückgreifen
( )''' 1 2f =−
Damit ist x=1 eine Wendestelle
( ) 3 21 1 111 1 1 3 1 1 3
3 3 3f =− ⋅ + + ⋅ =− + + = Es gibt also einen Wendepunkt
111
3W
Die Funktion hat Nullstellen bei 1,85x=− , 0x= und
4,85x= , einen Hochpunkt ( )3 9H , einen Tiefpunkt
51
3T − −
und einen Wendepunkt 11
13
W

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 22
Steigungsverhalten
Bei 1x<− , also links des Tiefpunktes, fällt der Graph streng monoton
Bei 1 3x− < < , also zwischen den Extrempunkten, steigt der Graph monoton
Bei 3x> , also rechts des Hochpunktes, fällt der Graph wieder streng monoton
Krümmungsverhalten
Bei 1x< , also links des Wendepunktes, liegt eine Linkskrümmung vor, weil in diesem Bereich der Tiefpunkt liegt
Bei 1x> , also rechts des Wendepunktes, liegt eine Rechtskrümmung vor, weil in diesem Bereich der Hochpunkt liegt
Verlauf für x→±∞
Wenn x gegen ∞ läuft, läuft 31
3x− gegen −∞ . Die anderen Summanden kann man
ignorieren, weil bei einer ganzrationalen Funktion nur die höchste Potenz Einfluss auf den Verlauf des Graphen ins Unendliche hat. Deswegen läuft auch die ganze Funktion gegen −∞
. Wenn x gegen −∞ läuft, muss die Funktion gegen ∞ laufen, weil 31
3x− gegen ∞ läuft
1x<− fällt streng monoton
1 3x− < < steigt streng monoton
3x> fällt streng monoton
1x< linksgekrümmt
1x> rechtsgekrümmt
x→∞ ( )f x →−∞
x→−∞ ( )f x →∞

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 23
Funktionsscharen
Gegeben ist die Funktion ( ) 2 2 22kf x x x
k
= − mit 0k≠ .Untersuchen Sie die Funktion im
Hinblick auf charakteristische Punkte und geben Sie eine Ortslinie für alle Extrempunkte an.
Zunächst kann man wieder die Ableitungen bilden
( )
( )
2 2 4 2
3 2
2 42 2
8 1' 8 8
k
k
f x x x x xk k
f x x x x xk k
= − = −
= − = −
( )
( )
2 28 1'' 24 24
3
''' 48
k
k
f x x xk k
f x x
= − = −
=
Nullstellen
( ) 2 2
2 2 2
20 2 0
2 22 0 oder 0 0 oder
2 20 oder oder
kf x x xk
x x x xk k
x x xk k
= ⇔ − =
= − = ⇔ = =
= = =−
Fallunterscheidung
0k<
Eine Nullstelle bei 0x=
0k>
Drei Nullstellen bei 0x= , 2
xk
= und 2
xk
=−
Extrem- und Sattelpunkte
Die Extremstellen liegen bei Nullstellen der ersten Ableitung
( ) 2
2 2
1' 0 8 0
1 18 0 oder 0 0 oder
1 10 oder oder
kf x x xk
x x x xk k
x x xk k
= ⇔ − =
= − = ⇔ = =
= = =−

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 24
Fallunterscheidung
0k<
Es gibt einen möglichen Extrempunkt bei 0x= . Eine Funktion vierten Grades ist immer eine nach oben oder unten geöffnete Kurve, bei einen positiven Faktor vor der vierten Potenz von x ist sie nach oben geöffnet. Eine nach oben geöffnete Kurve muss mindestens einen Tiefpunkt haben, deswegen ist bei 0x= ein Tiefpunkt
( )0 0 (Nullstelle)kf =
Es gibt also einen Tiefpunkt ( )0 0T
0k>
Es gibt drei mögliche Extrempunkte bei 0x= , 1
xk
= und 1
xk
=− . Setzt man diese
Werte in die zweite Ableitung ein, kann man erkennen, ob ein Extrempunkt vorliegt
( )
2
2
2
1 1 8 1 8 24 8 16'' 24 24 0
8 8'' 0 24 0 0
1 1 8 1 8 24 8 16'' 24 24 0
k
k
k
fk k k k k k k k
fk k
fk k k k k k k k
− = ⋅ − − = ⋅ − = − = >
= ⋅ − =− <
= ⋅ − = ⋅ − = − = >
Bei 1
xk
=± ist die zweite Ableitung positiv, es liegt ein Tiefpunkt vor, bei 0x= liegt
wegen dem negativen Wert der zweiten Ableitung ein Hochpunkt vor
( )2 2
2
2 2
0 0 (Nullstelle)
1 1 1 2 1 1 2 2 1 22 2
1 1 1 22
k
k
k
f
fk k k k k k k k k k
fk k k k
=
− = ⋅ − − − = ⋅ ⋅ − = ⋅ − =−
= ⋅ − 2
1 1 2 2 1 22
k k k k k k
= ⋅ ⋅ − = ⋅ − =−
Es gibt einen Hochpunkt ( )0 0H sowie zwei Tiefpunkte 1 2
1 2T
k k
− und 2 2
1 2T
k k
− −

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 25
Wendepunkte
Wendepunkte liegen bei Nullstellen der zweiten Ableitung
( ) 2 2 21 1 1'' 24 0 0
3 3 3
1 1 oder
3 3
kf x x x xk k k
x xk k
= − = ⇔ − = ⇔ =
= =−
Fallunterscheidung
0k<
Es gibt keinen Wendepunkt
0k>
Es gibt zwei mögliche Wendepunkte bei 1
3x
k=±
Weil die Funktionen drei Extrempunkte haben, müssen sie auch mindestens zwei Wendepunkte haben. Damit sind beide möglichen Stellen Wendestellen
2 2
2
2 2
1 1 1 2 1 1 6 2 5 102 2
3 3 3 3 3 3 3 3 9
1 1 1 22
3 3 3
k
k
fk k k k k k k k k k
fk k k k
− = ⋅ − − − = ⋅ ⋅ − = ⋅ − =−
= ⋅ − = 2
1 1 6 2 5 102
3 3 3 3 9k k k k k k
⋅ ⋅ − = ⋅ − =−
Die Wendepunkte sind 1 2
1 10
3 9W
k k
− und 2 2
1 10
3 9W
k k
− −
Ortslinie der Tiefpunkte
Bei den Tiefpunkten T1 und T2 ergibt sich:
2 21 1 1 2
1
41 122
42 11
1 1 11
2 2 22
11
x x kx kk k x
y xk
xx
= ⇔ = ⇔ = ⇔ =
=− =− =− =−
2 22 2 2 2
2
42 222
42 22
1 1 11
2 2 22
11
x x kx kk k x
y xk
xx
=− ⇔ = ⇔ = ⇔ =
=− =− =− =−
Damit lässt sich die Lage aller Tiefpunkte durch die Funktion ( ) 42t x x=− beschreiben

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 26
( )
( )
4 2
3
6 3 6 4
' 24 6 6
a
a
f x x x x
f x x x
= + + −
= + +
( )
( )
5 3 5 3 2 32 3
4 2 3 4 4 23 4
5 107 10 18 7 10 18 5 10
10 30' 35 30 18 10 30 35 30 18
b
b
f x x x x x x x x xx x
f x x x x x x xx x
− −
− −
=− + + + − =− + + + −
=− + + − + =− + + − +
( )
( )
1 36 3 2 6 24 2 4
1 15 52 4
4
3 5 17 3 5 17
1 15 1 15' 18 34 18 34
2 4 2 4
c
c
f x x x x x x x x x
f x x x x x x xx x
− −
=− + − + =− + − +
=− + − + =− + − +
( ) ( ) ( ) ( )( ) ( )
( ) ( )
2 2 3 3
2
sin 3 sin cos sin 3
' cos 3 3
x xd
xd
f x x e x x x x e x
f x x e x
= + + + = + +
= + +
Ableitungen und Stammfunktionen bilden Leiten Sie die folgenden Funktionen nach den Ableitungsregeln ab.
a) ( ) 4 26 3 6 4af x x x x= + + − f) ( ) ( )43 cos xff x x x e= ⋅ ⋅
b) ( ) 5 32 3
5 107 10 18bf x x x x
x x=− + + + − g) ( ) ( )
63 5 sin x 42
xgf x e x
π− = − + + −
c) ( ) 6 3 243 5 17cf x x x x x=− + − + h) ( ) ( ) ( )2 32cos 15 2x x
hf x e e x= − +
d) ( ) ( ) ( ) ( )( )2 2 3sin 3 sin cosxdf x x e x x x= + + + i) ( )
3 2
1i
x xf x
x
+=
+
e) ( ) ( )2 3sin (x ) xef x x x x e= ⋅ − + ⋅ j) ( )
( )3
54 2
5
3sinj x
x xf x
e x
− =− −
Geben Sie eine Stammfunktion dieser Funktionen an.
k) ( )af x l) ( )bf x m) ( )cf x n) ( )df x
o) ( ) 3 2 93 2
2 3x x
of x e e −= − p) ( ) ( )7
2 4pf x x= −
a)
b)
c)
d)

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 27
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2 3
2 2 3
2 3 2
sin x
' 2 sin cos 3 1 x
' 2 sin cos 3 1
xe
x xe
xe
f x x x x e
f x x x x x x e x e
f x x x x x x x x e
= ⋅ − + ⋅
= ⋅ + ⋅ − + ⋅ − + ⋅
= + − + + +
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )( )
4
4
3 4 4
3 4 3
3 cos
3 cos
' ' ' '
' 12 cos 3 sin 3 cos
' 12 cos 3 cos sin 3 4cos cos sin
xf
x
f
x x xf
x xf
f x x x e u x v x w x
u x x v x x w x e
f x u x v x w x u x v x w x u x v x w x
f x x x e x x e x x e
f x x x x x x e x e x x x x
= ⋅ ⋅ = ⋅ ⋅
= = =
= ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅
= ⋅ ⋅ + ⋅ − ⋅ + ⋅ ⋅
= + − ⋅ = ⋅ + −
( ) ( )
( ) ( ) ( ) ( )
63 5
5 53 5 3 5
sin x 42
' 3 cos x 6 4 3 sin 6 42
xg
x xg
f x e x
f x e x e x x
π
π
−
− −
= − + + −
= − + + − = + + −
( ) ( ) ( ) ( )( ) ( )
( ) ( )
( ) ( ) ( )( )( ) ( ) ( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
2 2
3 32
2
3 3
22 2
cos 15 2 cos 15
2
' ' sin 45 ' ' sin 45 '
' 2 sin 45 2 2 2
x xh
x x
h
x x x xh
f x e e x u x v x
u x e v x e x
f x u x u x v x v x u x u x v x v x
f x xe e e e x
= − + = − ⋅
= = +
= ⋅ − − ⋅ ⋅ =− ⋅ − ⋅ ⋅
=− ⋅ − + ⋅ +
( )( )
( )
( ) ( )
( )( ) ( ) ( ) ( )
( )
( ) ( ) ( )( )
( )
3 2
3 2
2 3 2
2 2
3 2 2 3 2 3 2
2 2
2 1
2 1
3 2 2 1 2' ''
2 1
6 4 3 2 2 2 4 5 2'
4 4 1 4 4 1
i
i
i
u xx xf x
x v x
u x x x v x x
x x x x xu x v x u x v xf x
v x x
x x x x x x x x xf x
x x x x
+= =
+
= + = +
+ ⋅ + − + ⋅⋅ − ⋅= =
+
+ + + − − + += =
+ + + +
( )( ) ( )
( )
( ) ( )( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( )
( )
( )
3
3
3
54 2
5
5 4 2 5
54 2
2 5
3sin sin
3
3' '' cos
j x
x
j x
x x t xf x
w xe x
t x u v x u x x v x x x w x e x
x xt x w x t x w xf x
e xw x
− =− =− −
= = = − = −
−⋅ − ⋅ = ⋅ − −
e)
f)
g)
h)
i)
j)

Bjarne Kolb Lernen für das Abitur – Funktionen Seite 28
( )( ) ( )( ) ( ) ( )( ) ( )
( )
( )
( )( )( ) ( ) ( ) ( )( ) ( )
( )
( )
( )( ) ( ) ( ) ( ) ( )
( )( )
3
3
3 3
33
54 2
2 5
54 2
2 5
4 5 53 4 2 5 4 2 2 5 4 2
2 55
3' ' '' cos
3' ' '' cos
4 6 5 3 3 15 1 3' cos
j x
j x
x x
j xx
x xv x u v x w x u v x w xf x
e xw x
x xu v x w x v x u v x w xf x
e xw x
x x x x e x x x x e x xf x
e xe x
−⋅ ⋅ − ⋅ =− ⋅ −
−⋅ − ⋅ ⋅ = ⋅ −
− ⋅ − ⋅ − − − ⋅ − −= ⋅ −−
( ) ( )( ) ( ) ( ) ( )
( )( )
( ) ( )( ) ( ) ( )
( )( )
3 3
33
3
3 33
53 5 4 2 2 5 4 244 2
2 55
54 2 2 53 4 244 2
25 55
5 4 6 3 15 1 3' 3 cos
3 15 15 4 6 3' 3 cos
x x
j xx
x
j x xx
x x e x x x x e x xf x x x
e xe x
x x x ex x x xf x x x
e x e xe x
− ⋅ − − − ⋅ − − = − ⋅ ⋅ − −
− ⋅ − − − = − ⋅ − ⋅ − − −
( )
( )
4 2
5 3 2
6 3 6 4
63 4
5
a
a
f x x x x
F x x x x x
= + + −
= + + −
( )
( )
5 3 5 3 2 32 3
6 4 2 1 2 6 4 22
5 107 10 18 7 10 18 5 10
7 5 7 5 5 59 5 5 9
6 2 6 2
b
b
f x x x x x x x x xx x
F x x x x x x x x xx x
− −
− −
=− + + + − =− + + + −
=− + + − + =− + + − +
( )
( )
1 36 3 2 6 24 2 4
3 77 3 7 3 7 342 4
3 5 17 3 5 17
3 2 20 17 3 2 20 17
7 3 7 3 7 3 7 3
c
c
f x x x x x x x x x
F x x x x x x x x x
=− + − + =− + − +
=− + − + =− + − +
( ) ( ) ( ) ( )( ) ( )
( ) ( )
2 2 3 3
4
sin 3 sin cos sin 3
1cos 3
4
x xd
xd
f x x e x x x x e x
F x x e x
= + + + = + +
=− + +
( )
( )
3 2 9
3 2 9 3 2 9
3 2
2 31 3 1 2 1 1
3 2 2 3 2 3
x xo
x x x xo
f x e e
F x e e e e
−
− −
= −
= ⋅ − ⋅ = −
( ) ( )
( ) ( )( )
7
88
2 4
2 41 12 4
4 8 32
p
p
f x x
xF x x
= −
−=− ⋅ ⋅ − =−
k)
l)
m)
n)
o)
p)

Bjarne Kolb
( ) ( ) ( ) ( )b
b
aa
f x dx F x F b F a = = − ∫
Analysis
Integralrechnung
Lernen für das Abitur
Bjarne Kolb Lernen für das Abitur – Integrale
Inhalt
- Differenzialrechnung Seite 3 - Zusammenfassung Seite 5 - Herleitungen Seite 10 - Beispielrechnungen Seite 14

Bjarne Kolb Lernen für das Abitur – Integrale Seite 3
Differenzialrechnung – Definition
Die Differenzialrechnung beschäftigt sich mit der Steigung und dem Steigungsverhalten von Funktionen. Man bestimmt dabei die Steigung, auch Ableitung oder momentane Änderungsrate genannt) in einem Punkt einer Funktion. Die momentane Änderungsrate ist definiert als Grenzwert der Steigung einer Sekante durch den gesuchten Punkt und einen Punkt in der Nähe, wobei dieser sich immer weiter dem gesuchten Punkt annähert:
( )( ) ( )
0
00
0
' limx x
f x f xf x
x x→
− = −
– Ableitungsfunktion
Bestimmt man die momentane Änderungsrate nicht nur in einem Punkt, sondern in jedem Punkt einer Funktion, so erhält man die dazugehörige Ableitungsfunktion. Zur Unterscheidung von der Ausgangsfunktion wird bei der Ableitung im Namen ein Apostroph hinzugefügt:
( ) ( )
( ) ( )
( ) ( )
( ) ( )
Ableiten
Ableiten
Ableiten
Ableiten
'
' ''
'' '''
'
f x f x
f x f x
f x f x
g x g x
→
→
→
→
x
y
X0
X
Abb. 1

Bjarne Kolb Lernen für das Abitur – Integrale Seite 4
– Zusammenhänge zwischen Funktion und Ableitung
Neben der Bestimmung von Steigungen gibt es noch eine weitere häufige Verwendung der Ableitung. Man kann mit ihr signifikante Punkte des Funktionsgraphen bestimmen. Dafür benötigt man die erste und zweite Ableitung, manchmal auch die dritte.
Besonderer Punkt Bedingungen Extrempunkt Notwendige Bedingung: ( )0' 0f x =
Hinreichende Bedingung: ( )0'' 0f x < (Hochpunkt)
oder ( )0'' 0f x > (Tiefpunkt)
bzw. Vorzeichenwechsel von ( )'f x
Sattelpunkt Notwendige Bedingung: ( )0' 0f x =
Hinreichende Bedingung: ( )0'' 0f x =
bzw. Wendepunkt an der Stelle Wendepunkt Notwendige Bedingung: ( )0'' 0f x =
Hinreichende Bedingung: ( )0''' 0f x ≠
bzw. Vorzeichenwechsel von ( )''f x
Bei den Bedingungen wird zwischen notwendiger und hinreichender Bedingung unterschieden. Nur wenn die notwendige Bedingung stimmt, kann es der bestimmte Punkt sein, wenn zusätzlich die hinreichende Bedingung stimmt, ist es der Punkt
Grenzwert In der Analysis stößt man oft auf Grenzwertbestimmung. Aber was sind Grenzwerte eigentlich?
Grenzwertbestimmung ist die Berechnung eines Terms oder einer Funktion, in der ein Wert vorkommt, dem man nicht erreichen kann, sondern sich ihm nur annähern (z.B.: ∞ ). Man ersetzt deshalb diesen Wert durch eine Variable, die sich dann dem Wert annähert. Auf diese Weise kann man eine eigentlich unmögliche Berechnung durchführen.
Will man zum Beispiel den Wert der Funktion ( ) 1xf x = an der Stelle x=0 bestimmen, kommt
man auf das Problem, dass die Division durch 0 nicht erlaubt ist. In diesem Fall benötigt man einen Grenzwert
( )( ) ( )10 0
lim lim xx x
f x→ →
=
Wenn x immer kleiner wird, wird der Kehrwert immer größer, deswegen nähert sich die Funktion dem Wert ∞ an, wenn man sich der Y-Achse nähert
( )( ) ( )10 0
lim lim xx x
f x→ →
= =∞

Bjarne Kolb Lernen für das Abitur – Integrale Seite 5
-1 1 2 3 4 5 6 7 8 9 10 11
-4
-3
-2
-1
1
2
3
4
5
6
x
y
Abb. 2
A=25
A=16
Orientierter Flächeninhalt Die Grundlage für die Definition des Integrals bilden Flächeninhalte. Man benötigt für Integrale aber auch negative Werte, während Flächeninhalte immer positiv sind. Dieses Problem löst man mit dem orientierten Flächeninhalt. Dabei werden Flächen oberhalb der X-Achse als positiv, Flächen unterhalb der X-Achse dagegen negativ gewertet
Berechnet man hier den gesamten Flächeninhalt, erhält man A=25+16=41
Bestimmt man dagegen die Summe der orientierten Flächeninhalte, wird die blaue Fläche negativ gewertet und man erhält O=25-16=9
Definition des Integrals Das Integral ist mit Flächen definiert. Immer zwischen zwei Nullstellen entspricht das Integral dabei dem orientierten Flächeninhalt. Da man eine Fläche nur von Rechtecken direkt berechnen kann (und von bestimmten anderen Flächen mit geraden Begrenzungen), muss man versuchen, sich der Fläche mit einem Rechteck anzunähern.
Weil es aber meistens sehr schwer ist, für so einen großen Bereich eine passende Höhe (bzw. Breite) für das Rechteck zu finden, teilt man die Fläche auf
Mit zwei Flächen kommt man der Funktion schon deutlich näher, bei der rechten Fläche ist die Höhe aber trotzdem noch schwer abzuschätzen
-1 1 2 3 4 5 6 7 8 9 10
-1
1
2
3
4
5
x
y
Abb. 3
-1 1 2 3 4 5 6 7 8 9 10
-1
1
2
3
4
5
x
y
Abb. 4

Bjarne Kolb Lernen für das Abitur – Integrale Seite 6
( )1
limb n
nn ia
f x dx O→∞ =
= ∑∫
( ) ( ) ( )lim limb
n nn na
f x dx S S→∞ →∞
= =∫
Fünf Flächen sind in diesem Fall schon relativ genau, bei der Fläche ganz rechts kann man aber immer noch Probleme beim Abschätzen der Höhe bekommen
Zehn Flächen reichen hier aus, um die Fläche graphisch so genau wie möglich zu bestimmen, aber es würde noch viel genauer gehen
Erst wenn man die Fläche (rein theoretisch) in unendlich viele unendlich dünne Rechtecke unterteilt hat, ist die Fläche genau beschrieben
Deshalb kann man das Integral als Grenzwert der Summe der orientierten Flächeninhalte für steigende Anzahl Rechtecke angeben. Man schreibt ein Integral als langgezogenes S, mdabei gibt man noch die Ober- und die Untergrenze an sowie die Funktion, von der das Integral bestimmt werden soll
Wenn man ohne Graphen arbeitet, kann man nicht die Höhe der jeweiligen Rechtecke ablesen, sondern muss sich von oben und von unten durch die Funktionswerte annähern.
Dadurch erhält man eine Obersumme (nS ) und eine Untersumme (nS ) der orientierten
Flächeninhalte. So ist das Integral algebraisch auch definiert, als gemeinsamer Grenzwert von Ober- und Untersumme
-1 1 2 3 4 5 6 7 8 9 10
-1
1
2
3
4
5
x
y
Abb. 5
-1 1 2 3 4 5 6 7 8 9 10
-1
1
2
3
4
5
x
y
Abb. 6
-1 1 2 3 4 5 6 7 8 9 10
-1
1
2
3
4
5
x
y
Abb. 7

Bjarne Kolb Lernen für das Abitur – Integrale Seite 7
Integralfunktionen Weil es Mathematikern nie genug ist, nur mit bestimmten Werten zu arbeiten, sondern alles immer allgemein sein soll, behält man nur die feste Untergrenze und ersetzt die Obergrenze durch eine Variable, um jedes Integral von diesem Startpunkt aus zu bestimmen. Damit erhält man eine Funktion, die so genannte Integralfunktion
( ) ( )x
a
a
I x f x dx= ∫
Hauptsatz der Integralrechnung Der Hauptsatz der Integral- und Differenzialrechnung beschreibt den Zusammenhang zwischen Integral und Ableitung: Die Ableitung der Integralfunktion entspricht der Ausgangsfunktion
( ) ( )'aI x f x=
Stammfunktion Mit Hilfe des Hauptsatzes der Integralrechnung kann man Integrale und Integralfunktionen ohne Grenzwertbestimmung ermitteln. Man muss nur eine Funktion finden, deren Ableitung die Ausgangsfunktion ergibt. Diese Art der Funktion heißt Stammfunktion oder auch Aufleitung. Man muss dabei aber beachten, dass nicht alle Stammfunktionen Integralfunktionen sind. Nur die Stammfunktionen, die eine Nullstelle haben, beschreiben Integrale, weil die Fläche vom Startwert bis zum Startwert die Breite und damit den Flächeninhalt 0 hat.
Mit den Stammfunktionen hat man eine einfache Möglichkeit, Integrale zu berechnen. Man muss nur die Differenz der Werte der Stammfunktion an der Ober- und Untergrenze bilden
( ) ( ) ( ) ( )b
b
aa
f x dx F x F b F a = = − ∫

Bjarne Kolb Lernen für das Abitur – Integrale Seite 8
Faktorregel Wenn man in einer Funktion einen konstanten Faktor ausklammern kann, kann man ihn beim Integrieren vor das Integral ziehen
( ) ( )b b
a a
k f x dx k f x dx⋅ = ⋅∫ ∫
Summenregel Das Integral der Summe zweier Funktionen entspricht der Summe der Integrale der einzelnen Funktionen
( ) ( )( ) ( ) ( )b b b
a a a
f x g x dx f x dx g x dx+ = +∫ ∫ ∫
Berechnen von Flächeninhalten Um mit Hilfe der Integrale Flächeninhalte zu bestimmen, muss man das Integral in mehrere Teilintegrale unterteilen, um die positiven und negativen Werte zu trennen. Als neue Ober- bzw. Untergrenzen dieser Teilintegrale muss man
A bei Flächen zwischen einer Funktion und der X-Achse die Nullstellen
B bei Flächen zwischen zwei Funktionen die Schnittpunkte
verwenden. Weil man aber Flächen, und keine orientierten Flächeninhalte, bestimmen will, muss man zuerst den Betrag der Teilintegrale bilden, bevor man sie zur Gesamtfläche aufaddiert
Beispielsweise müsste man bei einer Fläche, die durch f(x)=x²-1 beschrieben wird, das Integral bei x=1 und x=-1 unterteilen

Bjarne Kolb Lernen für das Abitur – Integrale Seite 9
Uneigentliche Integrale Uneigentliche Integrale sind Integrale, die man nicht direkt bestimmen kann, weil sie entweder nach links bzw. rechts unbegrenzt sind oder die Funktion an einer Stelle des integrierten Bereichs nicht definiert ist. Diese Integrale kann man nur mit Grenzwertbestimmung berechnen. Dafür muss man je nachdem, welche Grenze die direkte Berechnung verhindert, entweder die Ober- oder die Untergrenze durch eine Variable ersetzen und sich der gesuchten Grenze annähern lassen
Rotationskörper Mit Integralen kann man nicht nur Flächen, sondern unter bestimmten Bedingungen auch Volumina berechnen. Dafür muss der Körper rotationssymmetrisch sein, d. h. er verändert sich nicht, wenn man ihn um die Mittelachse dreht. Dann nämlich kann man den Körper durch einen Funktionsgraphen beschreiben, der sich um die X-Achse dreht.
Das Volumen dieser so genannten Rotationskörper bestimmt man entsprechend der Formel für die Kreisfläche, wobei der Radius durch die Funktion angegeben wird:
( ) ( )2 2b b
a a
V f x dx f x dxπ π= = ⋅∫ ∫
Aufpassen muss man, wenn der Körper durch die Differenz zweier Funktionen beschrieben wird. Man darf dann nicht direkt die Funktionen voneinander abziehen, sondern muss die sie einzeln quadrieren und dann erst subtrahieren
( ) ( )( )2b
a
V f x g x dxπ≠ ⋅ −∫
( ) ( )( )2 2b
a
V f x g x dxπ= ⋅ −∫

Bjarne Kolb Lernen für das Abitur – Integrale Seite 10
Herleiten und Beweisen Wenn man etwas herleiten oder beweisen muss, kann man sich an diesen Schritten orientieren:
1. Überlegung Was will man zeigen oder entwickeln?
2. Überlegung Welche Voraussetzungen hat man (Rechtwinkligkeit etc.)
3. Überlegung Welche mathematischen Definitionen/Sätze/Gesetze/Regeln könnte man verwenden
4. Notizen Erste Ansätze, den Beweis zu führen
5. Überlegung und Notizen Entwicklung des Beweises bzw. solange die Sätze/Definitionen umstellen und zusammenwürfeln, bis man auf die Lösung kommt
6. Reinschrift Formulieren der Zielsetzung
7. Überlegung und Notizen Korrekte Reihenfolge aufstellen und richtige Formulierung des Beweises finden
8. Reinschrift Verwendete Definitionen/Sätze/Gesetze/Regeln auflisten
9. Reinschrift Ausformulierung der Beweisführung/Herleitung
10. Reinschrift Bei Herleitungen noch einmal die entwickelte Formel aufschreiben, bei Beweisen das Ergebnis der Beweises notieren (Damit ist bewiesen, dass …)
Bei den folgenden Herleitungen werde ich aber nur die Schritte 6 und 8 bis 10 beachten, weil nur diese Reinschrift auch später im Abitur gewertet wird

Bjarne Kolb Lernen für das Abitur – Integrale Seite 11
Herleitung des Zylindervolumens – Zielsetzung
Herleitung einer Formel für das Volumen eines Zylinders
– Verwendete Sätze und Definitionen Volumen von Rotationskörpern
– Beweisführung
Ein Zylinder lässt sich beschreiben
durch die Funktion ( )f x r= mit dem
Radius r, die sich um die X-Achse dreht. Dabei wird der Bereich von 0 bis zur Höhe h betrachtet. Damit kann man dann die Formel für das Volumen
aufstellen:
( )
( )
2 2
0 0
2 2 2 2
00
h h
h
V f x dx r dx
r x r h r hr
π π
π π π
= ⋅ = ⋅
= ⋅ = ⋅ − ⋅ =
∫ ∫
– Ergebnis der Herleitung
Das Volumen eines Zylinders kann man mit folgender Formel bestimmen:
2V hrπ=
r
h0 Abb. 8

Bjarne Kolb Lernen für das Abitur – Integrale Seite 12
Herleitung des Kegelvolumens – Zielsetzung
Herleitung einer Formel für das Volumen eines Kegels
– Verwendete Sätze und Definitionen Volumen von Rotationskörpern
– Beweisführung
Ein Kegel lässt sich beschreiben durch
die Funktion ( ) rhf x x= mit dem
Radius r und der Höhe h, die sich um die X-Achse dreht. Dabei wird der Bereich von 0 bis zu h betrachtet. Damit kann man dann die Formel für das Volumen aufstellen:
( ) ( )
( )
2 2
2 2
2 2 2
2 2 2
22
0 0
2 3
3 00
3 3 3 2133 3 3
0
h h
rh
hh
r rh h
r r rh h h
V f x dx x dx
x dx x
h h hr
π π
π π
π π π
= ⋅ = ⋅
= ⋅ = ⋅
= ⋅ − ⋅ = =
∫ ∫
∫
– Ergebnis der Herleitung
Das Volumen eines Kegels kann man mit folgender Formel bestimmen:
213V hrπ=
r
h0 Abb. 9
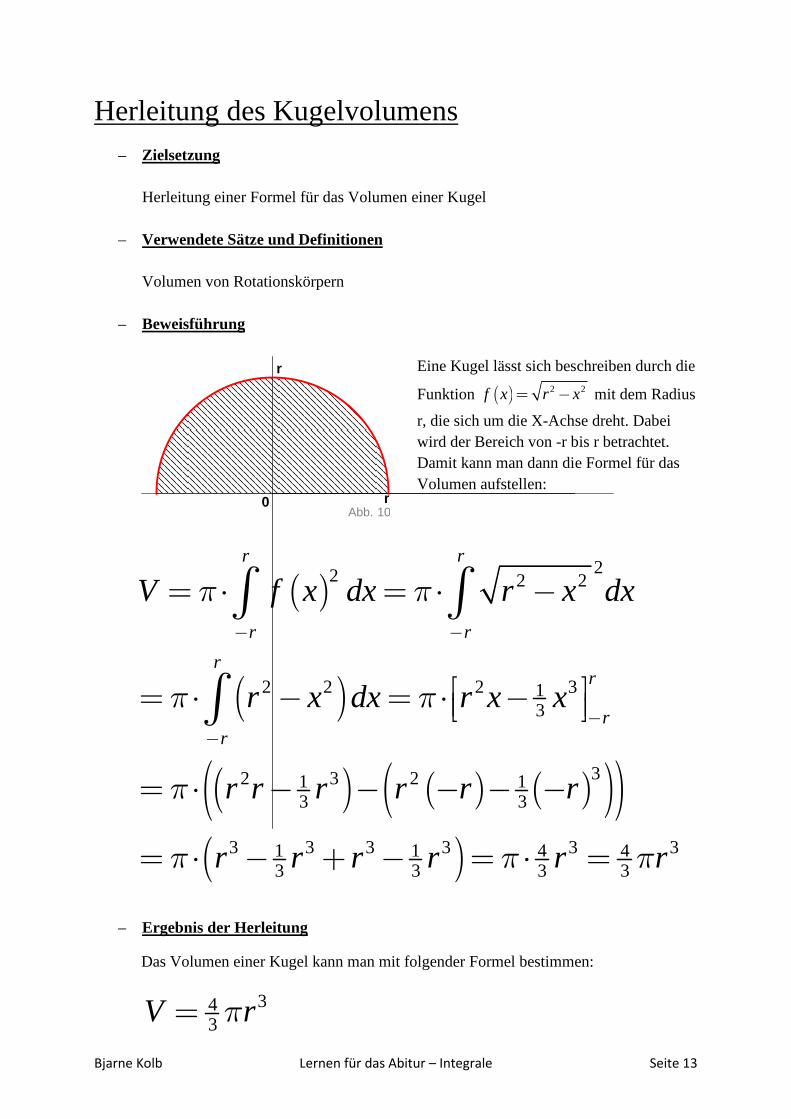
Bjarne Kolb Lernen für das Abitur – Integrale Seite 13
( )
( )
( ) ( ) ( )( )( )( )
22 2 2
2 2 2 313
32 3 21 13 3
3 3 3 3 3 31 1 4 43 3 3 3
r r
r r
rr
rr
V f x dx r x dx
r x dx r x x
r r r r r r
r r r r r r
π π
π π
π
π π π
− −
−−
= ⋅ = ⋅ −
= ⋅ − = ⋅ −
= ⋅ − − − − −
= ⋅ − + − = ⋅ =
∫ ∫
∫
Herleitung des Kugelvolumens – Zielsetzung
Herleitung einer Formel für das Volumen einer Kugel
– Verwendete Sätze und Definitionen Volumen von Rotationskörpern
– Beweisführung
Eine Kugel lässt sich beschreiben durch die
Funktion ( ) 2 2f x r x= − mit dem Radius
r, die sich um die X-Achse dreht. Dabei wird der Bereich von -r bis r betrachtet. Damit kann man dann die Formel für das Volumen aufstellen:
– Ergebnis der Herleitung
Das Volumen einer Kugel kann man mit folgender Formel bestimmen:
343V rπ=
r
0Abb.
10r

Bjarne Kolb Lernen für das Abitur – Integrale Seite 14
Bestimmung von Integralfunktionen Bestimmen Sie die Integralfunktionen der folgenden Funktionen
a) ( ) 3 219 2 5 7,5f x x x x= − + − mit dem Startwert 1
b) ( ) 2
4 35x
f x x= − mit dem Startwert -3
c) ( ) 3f x x= mit dem Startwert 4
d) ( ) 3 25 6 74
x x xf x − += mit dem Startwert -5
Um die Aufgaben zu lösen, muss man zuerst die allgemeine Stammfunktion bilden, dann den Startwert in die Stammfunktion einsetzen und mit 0 gleichsetzen. Damit kann man dann die zum Startwert passende Integralfunktion bestimmen.
a)
( )( )( )
( )
3 219
4 3 21 236 3
4 3 21 236 3
203 2031 236 3 36 36
4 3 2 2031 21 36 3 36
2 5 7,5 Startwert 1
2,5 7,5
1 0 1 1 2,5 1 7,5 1 0
2,5 7,5 0 0
2,5 7,5
f x x x x
F x x x x x c
F c
c c c
I x x x x x
= − + −
= − + − +
= ⇔ ⋅ − ⋅ + ⋅ − ⋅ + =
− + − + = ⇔ − = ⇔ =
= − + − +
b)
( )
( )
( ) ( )
( )
2
4 4 23
5 1 5 3
5 33
5 33
5 5 3 Startwert 3
3
3 0 3 0
243 1 0 244 0 244
244
x
x
x
f x x x x
F x x x c x c
F c
c c c
I x x c
−
−
−
−
= − = − −
= + + = + +
− = ⇔ − + + =
− − + = ⇔ − = ⇔ =
= + + +
c)
( )( )( )
( )
0,5
1,5
1,5
1,54
3 3 Startwert 4
2
4 0 2 4 0
16 0 16
2 16
f x x x
F x x c
F c
c c
I x x
= =
= +
= ⇔ ⋅ + =
+ = ⇔ =−
= −
d)
( )( )
( ) ( ) ( ) ( )
( )
3 2 3 25 6 7 5 3 74 4 2 4
4 3 25 7116 2 8
4 3 25 7116 2 8
3125 125 175 4475 447516 2 8 16 16
4 3 25 7 447515 16 2 8 16
Startwert 5
5 0 5 5 5 0
0 0
x x xf x x x x
F x x x x c
F c
c c c
I x x x x
− +
−
= = − + −
= − + +
− = ⇔ − − − + − + =
+ + + = ⇔ + = ⇔ =−
= − + −

Bjarne Kolb Lernen für das Abitur – Integrale Seite 15
Stammfunktion und Ausgangsfunktion Bilden Sie zu den folgenden Funktionen Stammfunktion und Ableitung
( )( ) ( )( )
4 3 2
2 3
1
sin
27 20 2 17
f x x x x x
g x x
h x x x x
= + − + −
=
= − + −
( )( )( )( )( )
4 3 2
3 2 1 0 1
3 2
5 4 3 21 1 1 1 15 4 3 2 1
5 4 3 21 1 1 15 4 3 2
1
' 4 3 2 1 0 1
' 4 3 2 1
1
f x x x x x
f x x x x x x
f x x x x
F x x x x x x c
F x x x x x x c
−
= + − + −
= ⋅ + ⋅ − ⋅ + ⋅ − ⋅ ⋅
= + − +
= ⋅ + ⋅ − ⋅ + ⋅ − ⋅ ⋅ +
= + − + − +
( ) ( )( ) ( ) ( )( ) ( ) ( )
2
2
sin
' cos sin
cos sin
g x x
g x x x
G x x c x c
π
π
=
= = −
=− + = + +
( )( ) ( )( ) ( )
2 3 3 2
2 1 0 1 2
4 3 2 1 4 3 21 1 14 3 2
27 20 2 17 20 27 2 17
' 3 20 2 27 1 2 0 17 60 54 2
20 27 2 1 17 5 9 17
h x x x x x x x
h x x x x x x x
H x x x x x c x x x x c
−
= − + − =− + + −
= ⋅ − ⋅ + ⋅ ⋅ + ⋅ ⋅ − ⋅ ⋅ =− + +
= ⋅ − ⋅ + ⋅ ⋅ + ⋅ ⋅ − ⋅ ⋅ + =− + + − +
Bestimmung von Integralen
Bestimmen Sie folgende Integrale ohne Verwendung der speziellen Fähigkeiten des GTR. Vereinfachen Sie vorher, falls möglich
a) ( )4
3 2
2
4x x dx−
−∫ b) 5
0
xdx∫
c) ( )1
4 3 2
3
8 6 4 2 10x x x x dx−
− + − +∫ d) ( ) ( )2 2
3 0,9 2 0,9
2 2
5 8x xx e dx x e dx− −
+ + −∫ ∫
e) ( )2
5 4 3
a
x x x x dx+ + +∫ f) 2
1
x dx∞
−∫

Bjarne Kolb Lernen für das Abitur – Integrale Seite 16
( )
( ) ( ) ( )( )( ) ( ) ( )
44 43 2 4 3 4 31 1 1 4
4 3 4 32 22
4 34 3 256 321 4 1 44 3 4 3 3 3
4 4
4 4 2 2 64 4 60 96 36
x x dx x x x x− −
−
− = − ⋅ = −
= ⋅ − ⋅ − ⋅ − − ⋅ − = − − + = − =−
∫
5 550,5 1,5 1,5 1,5 3 102 2 2 2 2
3 3 3 3 3 300 0
5 0 5 5 5 5 7,45xdx x dx x = = = ⋅ − ⋅ = ⋅ = ⋅ ⋅ = ≈ ∫ ∫
( ) ( )
( ) ( ) ( ) ( ) ( ) ( )( )( )( )
1 14 3 2 4 3 2
3 3
15 4 3 234 2 15 4 3 2 3
5 4 3 25 4 3 23 34 2 1 4 2 15 4 3 2 5 4 3 2
3 972 243 9 4468 89364 2 15 4 3 2 5 4 2 15 15
8 6 4 2 10 2 4 3 2 5
2 5
2 1 1 1 1 5 1 3 3 3 3 5 3
2 5 18 15 2 595,
x x x x dx x x x x dx
x x x x x
− −
−
− + − + = ⋅ − + − +
= ⋅ − + − +
= ⋅ ⋅ − ⋅ + ⋅ − ⋅ + ⋅ − ⋅ − − ⋅ − + ⋅ − − ⋅ − + ⋅ −
= ⋅ − + − + + + + + + = ⋅ = ≈
∫ ∫
733
( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )
2 2 2 23 0,9 2 0,9 3 0,9 2 0,9 3 2
2 2 2 2
2 4 34 3 4 35 8 5 8 5 8 64 64 1284 3 4 3 4 3 3 3 32
5 8 5 8 5 8
2 2 2 2 20 20
x x x xx e dx x e dx x e x e dx x x dx
x x
− − − −
−
+ + − = + + − = +
= + = ⋅ + ⋅ − ⋅ − + ⋅ − = + − − =
∫ ∫ ∫ ∫
( )
( ) ( )( )
225 4 3 6 5 4 21 1 1 1
6 5 4 2
6 5 4 2 6 5 4 21 1 1 1 1 1 1 16 5 4 2 6 5 4 2
6 5 4 2 6 5 4 232 32 3461 1 1 1 1 1 1 13 5 6 5 4 2 6 5 4 2 15
2 2 2 2
4 2
aa
x x x x dx x x x x
a a a a
a a a a a a a a
+ + + = + + +
= ⋅ + ⋅ + ⋅ + ⋅ − + + +
= + + + − − − − =− + + + +
∫
[ ] ( ) ( )
( )
2 2
1 1
2 1 1 1 1 1 1111
1
2 2 1
1 1
1 1
1 1 0 1
lim
lim lim
b
b
bb b
x b b b
b
bb b
x dx x dx
x dx x
x dx x dx
∞− −
→∞
− −
∞− −
→∞ →∞
=
= − = − = − − − =− + = −
= = − = − =
∫ ∫
∫
∫ ∫
a)
b)
c)
d)
e)
f)

Bjarne Kolb Lernen für das Abitur – Integrale Seite 17
( )
( ) ( ) ( )
( ) ( ) ( ) ( )( )( )( )
2
3 3 322 2 4 2
1 1 1
3 35 3 5 31 1 1 15 3 5 151 1
5 35 31 1 1 15 15 5 15
3803115 75
0,1
0,1 0,2 0,01
0,2 0,01 0,01
3 3 0,01 3 1 1 0,01 1
48,6 1,8 0,03 0,2 0,01
f x x
V f x dx x dx x x dx
x x x x x x
π π π
π π
π
π
− − −
− −
= +
= ⋅ = ⋅ + = ⋅ + +
= ⋅ + ⋅ + = ⋅ + +
= ⋅ ⋅ + ⋅ + ⋅ − ⋅ − + ⋅ − + ⋅ −
= ⋅ + + + + + =
∫ ∫ ∫
159,3π≈
Volumina von Rotationskörpern
Der Radius eines Rotationskörpers wird durch die Funktion ( ) 2 0,1 ; 1 3f x x x= + − ≤ ≤
angegeben. Bestimmen Sie das Volumen. Skizzieren Sie außerdem den entstehenden Körper
Der Körper hat ein Volumen von etwa 159,3 VE
Der Körper ist um 90° nach links gedreht dargestellt

Bjarne Kolb Lernen für das Abitur – Integrale Seite 18
Berechnen von Flächen mit Integralen
Bestimmen Sie die Fläche, die die Funktion ( ) 4 3 21 13 5 43 9
240 240 48 80 8f x x x x x= − + + − im
Intervall von -4 bis 7 mit der X-Achse einschließt, ohne Verwendung des abs-Befehls des GTR
Zunächst muss man die Nullstellen der Funktion bestimmen. Dazu gibt man die Funktionsgleichung in Y1 ein und lässt dann die einzelnen Nullstellen bestimmen (2nd|CALC|2:zero). Man muss dabei auf folgende Nullstellen kommen:
1 2 3 43 2 5 9x x x x=− = = =
Damit kann man die Fläche zwischen der Funktion und der X-Achse so berechnen:
( )
( ) ( ) ( ) ( )
4 3 2
3 2 5 7
4 3 2 5
1 13 5 43 9
240 240 48 80 8f x x x x x
A f x dx f x dx f x dx f x dx−
− −
= − + + −
= + + +∫ ∫ ∫ ∫
Weil man aber nicht die Betragsfunktion des GTR verwenden soll, muss man die Integrale einzeln mit der Funktion fnInt berechnen, dann per Hand gegebenenfalls das Vorzeichen streichen, danach kann man erst die Fläche berechnen
( )
( )
( )
( )
3 3
4 4
2 2
3 3
5 5
2 2
7 7
5 5
1 1,2991
1 4,6441
1 0,6619
1 0,8789
f x dx Y dx
f x dx Y dx
f x dx Y dx
f x dx Y dx
− −
− −
− −
= ≈
= ≈−
= ≈
= ≈−
∫ ∫
∫ ∫
∫ ∫
∫ ∫
Durch Aufaddieren der Teilintervalle (gegebenenfalls der Beträge) erhält man dann die
eingeschlossene Fläche:
1,2991 4,6441 0,6619 0,8789 7,848A≈ + + + =

Bjarne Kolb
Stochastik
Häufigkeits-
und Binomial-verteilungen
Lernen für das Abitur

Bjarne Kolb Lernen für das Abitur – Stochastik
Inhalt
- Vorwissen Seite 3 - Häufigkeitsverteilungen Seite 5 - Binomialverteilungen Seite 8 - Beispielaufgaben Seite 14

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 3
Vorwissen Bevor man sich mit der Stochastik der Sekundarstufe 2 auseinandersetzt, sollte man sich noch einmal das Vorwissen der Mittelstufe ins Gedächtnis rufen.
– Stochastik
Themenbereich der Mathematik, in dem man mit Wahrscheinlichkeiten und Häufigkeiten umgeht
– Wahrscheinlichkeit
Erwartete Anzahl eines Ergebnisses bei einem Zufallsexperiment, als Anteil an der Gesamtzahl
– absolute Häufigkeit
Anzahl eines Ereignisses bei einem durchgeführten Zufallsexperiment
– relative Häufigkeit
Anteil der absoluten Häufigkeit an der Gesamtzahl
– empirische Daten
Häufigkeiten sind nicht durch theoretische Überlegung, sondern durch praktische Durchführung ermittelt worden. Diese Art von Daten wird empirisch genannt
– Laplace-Experiment
Zufallsversuch, bei dem alle Ergebnisse die gleiche Wahrscheinlichkeit haben. Aus diesem Grund kann man bei einem Laplace-Experiment die Wahrscheinlichkeit einfach ausrechnen:
Anzahl der günstigen Fälle
Anzahl aller FälleP =
– Nicht-Laplace-Experiment
Alle Experimente, bei denen nicht alle Wahrscheinlichkeiten gleich sind, sind Nicht-Laplace-Experimente. Dabei kann man sich manchmal durch logisches Nachdenken die Wahrscheinlichkeiten überlegen, meistens müssen die Wahrscheinlichkeiten aber aus durchgeführten Zufallsexperimenten abgeleitet werden.
– Das Gesetz der großen Zahlen
Zufallsexperimente sollte man immer in möglichst großer Zahl durchführen, weil die entstandenen Werte dann aussagekräftiger sind. Der Grund dafür ist, dass die ermittelte Wahrscheinlichkeit viel wahrscheinlicher im richtigen Bereich liegt. Diese Tatsache nennt man Gesetz der Großen Zahlen

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 4
– Baumdiagramme
Um mehrstufige Zufallsexperimente zeichnerisch darzustellen, ist in den meisten Fällen ein Baumdiagramm gut geeignet
Für die Arbeit mit Baumdiagrammen muss man auf zwei wichtige Regeln achten:
Pfadmultiplikationsregel: Die Wahrscheinlichkeiten entlang eines Pfades werden multipliziert
Pfadadditionsregel: Die Wahrscheinlichkeiten von verschiedenen Pfaden werden addiert
A
a
B
B
b
b
Stufe 1 Stufe
2
P(A)
P(a)
P(B)
P(B)
P(b)
P(b)
Abb. 1
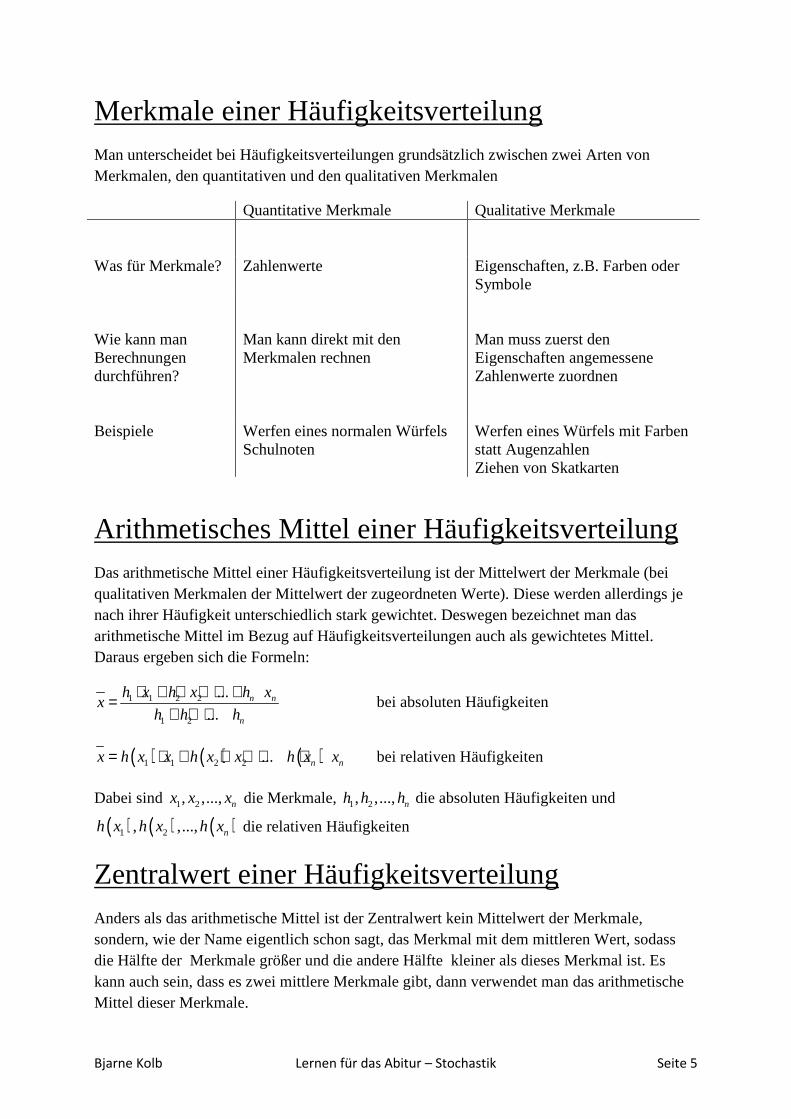
Bjarne Kolb Lernen für das Abitur – Stochastik Seite 5
Merkmale einer Häufigkeitsverteilung Man unterscheidet bei Häufigkeitsverteilungen grundsätzlich zwischen zwei Arten von Merkmalen, den quantitativen und den qualitativen Merkmalen
Quantitative Merkmale Qualitative Merkmale
Was für Merkmale? Zahlenwerte Eigenschaften, z.B. Farben oder Symbole
Wie kann man Berechnungen durchführen?
Man kann direkt mit den Merkmalen rechnen
Man muss zuerst den Eigenschaften angemessene Zahlenwerte zuordnen
Beispiele Werfen eines normalen Würfels Schulnoten
Werfen eines Würfels mit Farben statt Augenzahlen Ziehen von Skatkarten
Arithmetisches Mittel einer Häufigkeitsverteilung Das arithmetische Mittel einer Häufigkeitsverteilung ist der Mittelwert der Merkmale (bei qualitativen Merkmalen der Mittelwert der zugeordneten Werte). Diese werden allerdings je nach ihrer Häufigkeit unterschiedlich stark gewichtet. Deswegen bezeichnet man das arithmetische Mittel im Bezug auf Häufigkeitsverteilungen auch als gewichtetes Mittel. Daraus ergeben sich die Formeln:
1 1 2 2
1 2
...
...n n
n
h x h x h xx
h h h
⋅ + ⋅ + + ⋅=+ + +
bei absoluten Häufigkeiten
( ) ( ) ( )1 1 2 2 ... n nx h x x h x x h x x= ⋅ + ⋅ + + ⋅ bei relativen Häufigkeiten
Dabei sind 1 2, ,..., nx x x die Merkmale, 1 2, ,..., nh h h die absoluten Häufigkeiten und
( ) ( ) ( )1 2, ,..., nh x h x h x die relativen Häufigkeiten
Zentralwert einer Häufigkeitsverteilung Anders als das arithmetische Mittel ist der Zentralwert kein Mittelwert der Merkmale, sondern, wie der Name eigentlich schon sagt, das Merkmal mit dem mittleren Wert, sodass die Hälfte der Merkmale größer und die andere Hälfte kleiner als dieses Merkmal ist. Es kann auch sein, dass es zwei mittlere Merkmale gibt, dann verwendet man das arithmetische Mittel dieser Merkmale.
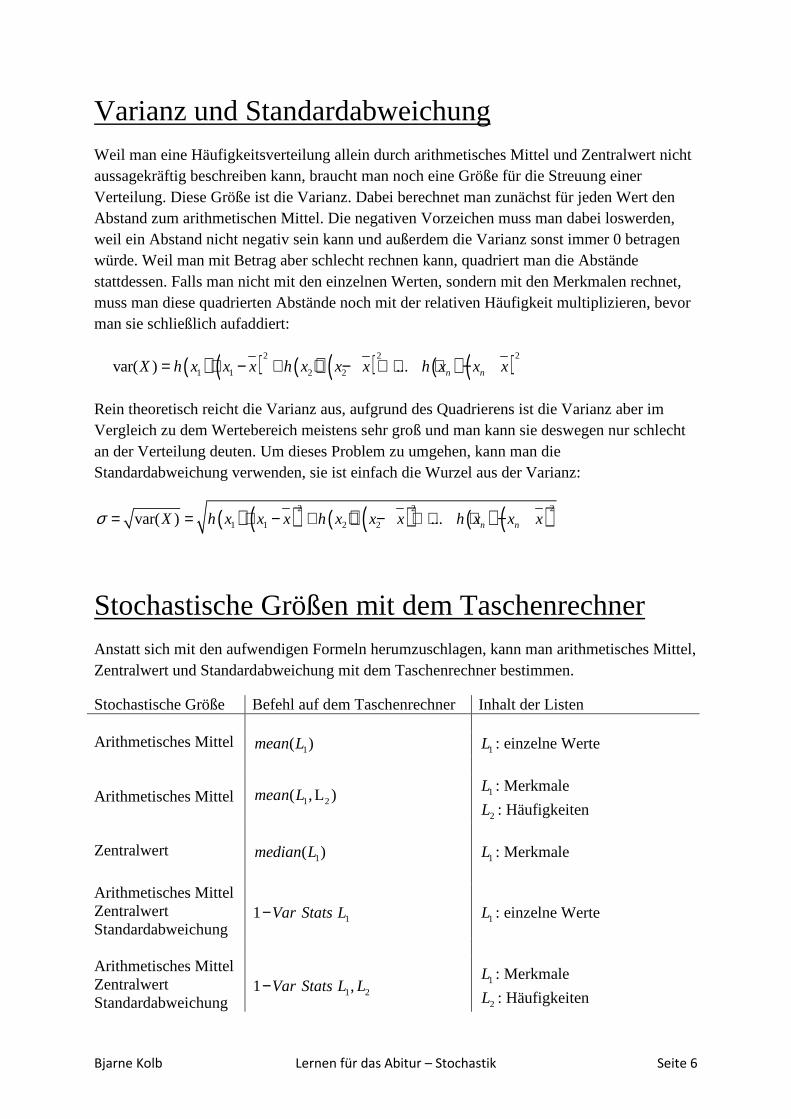
Bjarne Kolb Lernen für das Abitur – Stochastik Seite 6
Varianz und Standardabweichung Weil man eine Häufigkeitsverteilung allein durch arithmetisches Mittel und Zentralwert nicht aussagekräftig beschreiben kann, braucht man noch eine Größe für die Streuung einer Verteilung. Diese Größe ist die Varianz. Dabei berechnet man zunächst für jeden Wert den Abstand zum arithmetischen Mittel. Die negativen Vorzeichen muss man dabei loswerden, weil ein Abstand nicht negativ sein kann und außerdem die Varianz sonst immer 0 betragen würde. Weil man mit Betrag aber schlecht rechnen kann, quadriert man die Abstände stattdessen. Falls man nicht mit den einzelnen Werten, sondern mit den Merkmalen rechnet, muss man diese quadrierten Abstände noch mit der relativen Häufigkeit multiplizieren, bevor man sie schließlich aufaddiert:
( ) ( ) ( ) ( ) ( ) ( )2 2 2
1 1 2 2var( ) ... n nX h x x x h x x x h x x x= ⋅ − + ⋅ − + + ⋅ −
Rein theoretisch reicht die Varianz aus, aufgrund des Quadrierens ist die Varianz aber im Vergleich zu dem Wertebereich meistens sehr groß und man kann sie deswegen nur schlecht an der Verteilung deuten. Um dieses Problem zu umgehen, kann man die Standardabweichung verwenden, sie ist einfach die Wurzel aus der Varianz:
( ) ( ) ( ) ( ) ( ) ( )2 2 2
1 1 2 2var( ) ... n nX h x x x h x x x h x x xσ = = ⋅ − + ⋅ − + + ⋅ −
Stochastische Größen mit dem Taschenrechner Anstatt sich mit den aufwendigen Formeln herumzuschlagen, kann man arithmetisches Mittel, Zentralwert und Standardabweichung mit dem Taschenrechner bestimmen.
Stochastische Größe Befehl auf dem Taschenrechner Inhalt der Listen Arithmetisches Mittel
1( )mean L 1L : einzelne Werte
Arithmetisches Mittel
1 2( , L )mean L 1L : Merkmale
2L : Häufigkeiten
Zentralwert
1( )median L 1L : Merkmale
Arithmetisches Mittel Zentralwert Standardabweichung
11 Var Stats L−
1L : einzelne Werte
Arithmetisches Mittel Zentralwert Standardabweichung
1 21 ,Var Stats L L−
1L : Merkmale
2L : Häufigkeiten

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 7
Histogramme – Häufigkeitsverteilungen darstellen Um den Inhalt einer Häufigkeitsverteilung auf einen Blick erkennen zu können, kann man sie als Histogramm zeichnen. Ein Histogramm ist ein Säulendiagramm, bei dem die Merkmale auf die X-Achse verteilt sind und die Häufigkeit die Höhe bestimmt.
Wenn man viel mehr Werte als Merkmale hat, ergibt sich auch direkt ein aussagekräftiges Bild. Hat man aber zu viele verschiedene Merkmale, kommt jedes dieser Merkmale nur einfach oder doppelt vor. Dann ist es sinnvoll, die Merkmale/Werte in Klassen einzuteilen.
Abb. 2
Dabei sollte man nicht zu viele Klassen wählen, weil das Histogramm dadurch nicht übersichtlicher wird als ohne Klassen (1.Histogramm), aber auch nicht zu wenige, weil das Histogramm dadurch seine Aussagekraft verliert (3.Histogramm). Man muss einen Mittelweg finden, meistens braucht man etwa 10 Klassen, in diesem Fall sind es aber nur 6 (2.Histogramm).
Sinnvoll ist es außerdem, die Klassen gleich breit zu wählen, weil man sich beim Betrachten eines Histogrammes am Flächeninhalt orientiert, und nur bei gleich breiten Klassen ist der Flächeninhalt proportional zur Säulenhöhe.
Histogramme mit dem Taschenrechner zeichnen
Auf dem Taschenrechner kann man Histogramme mit dem Plot-Menü zeichnen lassen. Dieses findet man bei |2nd|Y=|. Man muss dabei die dritte Darstellungsvariante (das Bild mit den Balken) wählen. Unter Xlist gibt man den Namen der Liste ein, in die man die Merkmale eingetragen hat, unter Freq die Liste mit den dazugehörigen Häufigkeiten. Um das Histogramm gut sehen zu können, sollte man noch die Anzeige mit ZoomStat (|ZOOM|9|) einstellen lassen. Ganz besonders sollte man auf die Einstellung Xscl achten, weil sie nicht wie bei den Funktionsgleichungen nur den Abstand der Markierungen auf der X-Achse angibt, sondern die Breite der Klassen. Zu dem zweiten Histogramm (Abb. 2) gehören folgende Einstellungen
Abb. 3
Bjarne Kolb Lernen für das Abitur – Stochastik Seite 8
Zufallsgrößen Die Merkmale eines Zufallsexperimentes kann man zu einer Zufallsgröße zusammenfassen, die demnach die Werte aller Merkmale annehmen kann. Zufallsgrößen werden mit Großbuchstaben benannt, am häufigsten verwendet man X, aber auch Y und Z findet man häufiger.
Man betrachtet, wenn man eine solche Zufallsgröße definiert hat, auch nicht mehr die Häufigkeiten/Wahrscheinlichkeiten der einzelnen Merkmale, sondern die Verteilung der gesamten Zufallsgröße.
Außerdem verändert sich die Notation der Wahrscheinlichkeiten, wenn man mit einer Zufallsgröße arbeitet. Beispielsweise wird die Wahrscheinlichkeit, dass eine Zufallsgröße X den Wert 2 annimmt, als P(X=2) bezeichnet. Je nachdem, welche Bedingungen man an die Zufallsgröße stellt, ergeben sich folgende Schreibweisen:
Bedingung Notation X soll 4 betragen P(X=4) X soll kleiner als 10 sein P(X<10) X soll mindestens 1,5 betragen P(X≥1,5) X soll zwischen 3 und 7 liegen P(3≤X≤7) X soll 1 oder 5 betragen P(X={1;5}) oder P({X=1;X=5})
Wenn man für jeden Wert einer Zufallsgröße die Wahrscheinlichkeit bestimmt, erhält man die Wahrscheinlichkeitsverteilung dieser Zufallsgröße. Diese kann man wie die Häufigkeitsverteilung gut in einem Histogramm darstellen, wobei die Einteilung in Klassen in diesem Fall nicht notwendig ist. Alternativ kann man die Verteilung auch in einer übersichtlichen Tabelle auflisten.
Erwartungswert einer Zufallsgröße Natürlich kann man auch bei einer Wahrscheinlichkeitsverteilung wieder das arithmetische Mittel bestimmen. Dieses berechnet man, indem man die mit der Wahrscheinlichkeit multiplizierten Werte der Zufallsgröße aufaddiert. Weil man in diesem Fall keinen Mittelwert empirischer Daten errechnet, sondern den Wert, den man bei Durchführung eines Zufallsexperimentes erwartet, wird die Bezeichnung „arithmetisches Mittel“ durch den Begriff „Erwartungswert“ ersetzt. Dieser wird entweder als E(X) oder als µ (griechisches mü) notiert.
( ) ( ) ( )1 1 2 2(X) ... n nE a P X a a P X a a P X aµ= = ⋅ = + ⋅ = + + ⋅ =
mit der Zufallsgröße X und den möglichen Werten 1 2, ,..., na a a

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 9
1 2, ,..., na a a
Standardabweichung einer Zufallsgröße Auch die Varianz und die Standardabweichung kann man bei einer Zufallsgröße leicht berechnen. Dazu muss man nur in der Formel die Häufigkeit durch die Wahrscheinlichkeit ersetzen. Damit ergeben sich die Formeln:
( ) ( ) ( ) ( ) ( ) ( )2 2 2
1 1 2 2var( ) ... n nX P X a a P X a a P X a aµ µ µ= = ⋅ − + = ⋅ − + + = ⋅ −
( ) ( ) ( ) ( ) ( ) ( )2 2 2
1 1 2 2var( ) ... n nX P X a a P X a a P X a aσ µ µ µ= = = ⋅ − + = ⋅ − + + = ⋅ −
wieder mit der Zufallsgröße X und den möglichen Werten
Kumulierte Wahrscheinlichkeit einer Zufallsgröße Natürlich rechnet man nicht nur mit Wahrscheinlichkeiten einzelner Werte. Betrachtet man zum Beispiel die Anzahl fehlerhafter Geräte bei einer Produktion von 1000 Computern, will man nur selten die Wahrscheinlichkeit für genau 50 defekte PCs wissen. Viel eher will man wissen, wie wahrscheinlich es ist, dass höchstens 50 Geräte nicht funktionieren. Dafür muss man alle Wahrscheinlichkeiten von Werten kleiner oder gleich 50 zusammenrechnen. Diese Summe der Wahrscheinlichkeiten wird kumulierte Wahrscheinlichkeit genannt.
Im Folgenden kann man die Histogramme der Wahrscheinlichkeitsverteilung und der Verteilung der kumulierten Wahrscheinlichkeiten einer Zufallsgröße sehen:
Abb. 4

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 10
( ) ( )1n kk n k kP X k p q p p
−−= = ⋅ = ⋅ −
n
k
( ) ( )1n kkn
P X k p pk
− = = ⋅ ⋅ −
Bernoulli-Ketten Die Grundlage für Binomialverteilungen ist die Definition der Bernoulli-Ketten. Diese sind besondere Zufallsexperimente, für die zwei Bedingungen gelten
- Es gibt nur die Ergebnisse „Erfolg“ (mit der Wahrscheinlichkeit p) und „Misserfolg“ (mit der Wahrscheinlichkeit q=1-p)
- Wenn das Experiment mehrfach durchgeführt wird, bleibt die Wahrscheinlichkeit auf jeder Stufe gleich
Ein solches Experiment mit n Durchführungen wird als n-stufiges Bernoulli-Experiment oder n-stufige Bernoulli-Kette bezeichnet.
Die Berechnungen an Bernoulli-Ketten sind relativ einfach, die Schwierigkeit liegt eher darin zu erkennen, ob ein Experiment ein Bernoulli-Experiment ist.
Bernoulli-Formel Wenn man sich eine n-stufige Bernoulli-Kette als Baumdiagramm vorstellt, ergibt sich für die Wahrscheinlichkeit an einem Pfad mit k Erfolgen:
Die Anzahl der Pfade kann man mit dem Binomialkoeffizienten bestimmen
Daraus ergibt sich insgesamt die Formel:
Binomialkoeffizient Der Binomialkoeffizient gibt die Anzahl der Pfade des Baumdiagramms einer n-stufigen Bernoulli-Kette an, mit der man k Erfolge erreicht. Den Hintergrund kann man sich klarmachen, wenn man die Rechnung hinter dem Binomialkoeffizienten kennt:
( )( ) ( )
( )1 ... 1!
! ! 1 ... 1
n n n n kn
k k n k k k
⋅ − ⋅ ⋅ − + = = ⋅ − ⋅ − ⋅ ⋅
Wenn man nicht bei jeder einzelnen Stufe betrachtet, ob man einen Erfolg oder einen Misserfolg hat, sondern überlegt, wie viele Möglichkeiten man hat, die Erfolge auf die Stufen zu verteilen, kommt man auf n Möglichkeiten für den ersten Erfolg, n–1 Möglichkeiten für den zweiten, bis zum letzten Erfolg mit n–1+k Möglichkeiten. Insgesamt hat man damit n·(n-1) ·…·(n-k+1) Möglichkeiten, k Erfolge auf n Möglichkeiten zu verteilen. Dabei bekommt man aber leider immer mehrere Möglichkeiten, die eine identische Verteilung von Erfolgen und Misserfolgen aufweisen, insgesamt sind es k!=k·(k-1) ·…·1. Deshalb gibt der Binomialkoeffizient die Anzahl der Möglichkeiten für k Erfolge bei n Stufen an.

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 11
Binomialverteilung Die Wahrscheinlichkeitsverteilung eines Bernoulli-Experimentes bezeichnet man in Anlehnung an den Binomialkoeffizienten als Binomialverteilung. Dabei gibt man meistens die Stufenzahl n und die Wahrscheinlichkeit p an.
Erwartungswert einer Binomialverteilung Allgemein muss man den Erwartungswert einer Wahrscheinlichkeitsverteilung mit einer aufwendigen Formel berechnen, bei Binomialverteilungen ist es aber deutlich einfacher: Der Erwartungswert ist das Produkt aus Stufenzahl und Wahrscheinlichkeit. In der Nähe des Erwartungswertes findet man auch oft das Maximum der Verteilung.
n pµ = ⋅
Standardabweichung einer Binomialverteilung Auch für die Standardabweichung gibt es eine viel kürzere Formel, wenn man mit Binomialverteilungen arbeitet:
( ) ( )1 1n p p pσ µ= ⋅ ⋅ − = ⋅ −
Binompdf und binomcdf Die Wahrscheinlichkeit für Binomialverteilungen kann man auch direkt mit dem Taschenrechner bestimmen, die passenden Funktionen dafür sind binompdf und binomcdf im Menü DISTR (|2nd|VARS|)
Binompdf (binomial probability density funktion) berechnet dabei die Wahrscheinlichkeit für einen bestimmten k-Wert, wobei man hinter dem Befehl in dieser Reihenfolge die Stufenzahl n, die Wahrscheinlichkeit p und die Anzahl der Erfolge k angeben muss:
binompdf(n,p,k)
Lässt man den k-Wert weg, so erhält man die gesamte Verteilung
Binomcdf (binomial cumulated density funktion) berechnet die kumulierte Wahrscheinlichkeit für einen k-Wert. Die Eingabe erfolgt wie bei binompdf:
binomcdf(n,p,k)

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 12
Histogramme von Binomialverteilungen Das Aussehen der Histogramme von Binomialverteilungen hängt von zwei Faktoren ab
1. Stufenzahl n
Mit wachsender Stufenzahl wird das Histogramm flacher, breiter und passt sich besser einer Funktion an
2. Wahrscheinlichkeit p
Mit wachsender Wahrscheinlichkeit verschiebt sich das gesamte Bild nach rechts. Außerdem wird das Bild immer asynchroner, je weiter man sich von der Wahrscheinlichkeit p=0,5 entfernt. Der Schwerpunkt der Verteilung wird dabei in Richtung 0 bzw. 1 verschoben
Die Folgenden Bilder sollen das verdeutlichen (man kann aber nur schlecht sehen, dass die Histogramme bei größerem n breiter werden, weil sie enger gezeichnet werden mussten):
n=5 n=10 n=25
p=0,1
p=0,4
p=0,5
p=0,7
Abb. 5

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 13
Sigma-Regeln – Rückschluss auf Stichproben Wenn man nicht rein theoretische, binomialverteilte Zufallsexperimente betrachtet, sondern Vorgänge in der Realität, z.B. einen Produktionsprozess, der annähernd binomialverteilt defekte Produkte hervorbringt (Man kann die Fehlerquote aber nicht exakt gleich halten, deswegen ist es nicht richtig binomialverteilt), will man meistens nicht einzelne Wahrscheinlichkeiten bestimmen, sondern die Wahrscheinlichkeit, dass die Anzahl der fehlerhaften Produkte innerhalb eines bestimmten Abstands vom Erwartungswert liegt. Wenn man diesen Abstand als Anteil an der Standardabweichung angibt, gibt es bestimmte Erfahrungswerte, die für jede Binomialverteilung mit kleineren Abweichungen gelten, für welchen Abstand man welche Wahrscheinlichkeiten erhält, die Sigma-Regeln
Kennen sollte man dabei einige Werte mit glatten Abständen sowie einige Werte mit glatten Wahrscheinlichkeiten
Bereich Wahrscheinlichkeit Bereich Wahrscheinlichkeit 1µ σ±
68,3% 1,64µ σ±
90%
2µ σ±
95,5% 1,96µ σ±
95% 3µ σ±
99,7% 2,58µ σ±
99%
Laplace-Bedingung Bei sehr wenigen Stufen weichen die Wahrscheinlichkeiten stark von diesen Literaturwerten ab. Aus diesem Grund hat der Namensgeber des Laplace-Experimentes, Pierre-Simon Laplace, eine Bedingung formuliert, wann diese Sigma-Regeln gelten:
3σ >
Die Sigma-Regeln gelten also nur bei einer Standardabweichung größer als 3 (Es kann auch bei kleinerer Standardabweichung passen, aber man muss es dann für jede Verteilung einzeln überprüfen)

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 14
Auswerten von Häufigkeitsverteilungen Für einen Qualitätstest wurden die Geschwindigkeiten eines Rennwagens mit 30 verschiedenen Fahrern gemessen (in km/h)
266 314 185 294 209 375 383 311 312 365 429 219 284 308 363 438 304 295 399 311 332 185 340 231 217 388 326 315 405 260
1) Bestimmen Sie das arithmetische Mittel und die Standardabweichung der 30 Geschwindigkeiten
2) Teilen Sie die Werte in Klassen zu je 10 km/h ein und zeichnen Sie das dazugehörige Histogramm. Begründen Sie, warum die Einteilung nicht sinnvoll ist
3) Wählen Sie eine sinnvolle Klassenbreite und zeichnen Sie wieder ein Histogramm 4) Bestimmen Sie das arithmetische Mittel und die Standardabweichung des
Histogramms mit Hilfe der Klassenmitten. Vergleichen Sie diese mit den Ergebnissen aus 1)
Für die Berechnung mit dem Taschenrechner stehen die Werte in der Liste L1
1)
( )( ) ( ) ( ) ( )
1
2 2 2 2
266 375 ... 217 260312,1
30
312,1
266 312,1 375 312,1 ... 217 312,1 260 312,168,5
30
x
x mean L
σ
+ + + += =
= =
− + − + + − + −= ≈
1-Var Stats L1 : (|STAT|=> CALC)
68,5xσ =
2)
180 – 190 2 6,67% 320 – 330 1 3,33% 200 – 210 1 3,33% 330 – 340 2 6,67% 210 – 220 2 6,67% 360 – 370 2 6,67% 230 – 240 1 3,33% 370 – 380 1 3,33% 250 – 260 1 3,33% 380 – 390 2 6,67% 260 – 270 1 3,33% 390 – 400 1 3,33% 280 – 290 1 3,33% 400 – 410 1 3,33% 290 – 300 2 6,67% 420 – 430 1 3,33% 300 – 310 2 6,67% 430 – 440 1 3,33% 310 – 320 5 16,67%

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 15
2)
Abb. 6
Weil die Klassen sehr klein gewählt sind, hat man in fast allen Klassen nicht mehr als zwei Werte und man kann die Verteilung nicht gut im Ganzen erkennen
3)
Übersichtlicher sind 50 km/h breite Klassen
150 – 200 2 1/15
200 – 250 4 2/15 250 – 300 5 1/6 300 – 350 10 1/3 350 – 400 6 1/5 400 – 450 3 1/10
Abb. 7 4)
( ) ( ) ( ) ( )
1 2 1 1 1 115 15 6 3 5 10
2 2 2 2 2 21 2 1 1 1 115 15 6 3 5 10
175 225 275 325 375 425 313,33
175 313,33 225 313,33 275 313,33 325 313,33 375 3
x
σ
= ⋅ + ⋅ + ⋅ + ⋅ + ⋅ + ⋅ ≈
= − + − + − + − + − + − ≈
Obwohl die Werte in relativ breite Klassen unterteilt sind, weichen die aus dem Histogramm errechneten Ergebnisse kaum von den exakten ab
( ) ( )2 2 2 2 2 21 2 1 1 1 115 15 6 3 5 10175 313,33 225 313,33 275 313,33 325 313,33 375 313,33 425 313,33 67,93= − + − + − + − + − + − ≈

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 16
Wahrscheinlichkeitsverteilungen
Für die oben zu sehenden Glücksräder wird ein Einsatz von 2,50€ verlangt. Prüfen Sie, ob es sich langfristig für den Betreiber lohnt. Prüfen Sie auch, an welchem der Glücksräder man sein Glück versuchen sollte, wenn man risikofreudig ist.
Damit es sich für den Betreiber lohnt, muss der Erwartungswert unter dem Einsatz liegen.
Für den Erwartungswert des linken Glücksrades erhält man:
34 2 110 10 10 101 2 3 5 2,1µ = ⋅ + ⋅ + ⋅ + ⋅ =
Für das rechte Glücksrad ergibt sich:
34 2 110 10 10 100 1 4 10 2,1µ = ⋅ + ⋅ + ⋅ + ⋅ =
Bei beiden Glücksrädern macht der Betreiber im Durchschnitt einen Gewinn von 0,40€
Um herauszufinden, welches Glücksrad für risikofreudige Spieler ist, muss man die Standardabweichung bestimmen. Je größer die Abweichung ist, desto größer ist das Risiko
Für das linke Glücksrad erhält man:
( ) ( ) ( ) ( )2 2 2 234 2 110 10 10 101 2,1 2 2,1 3 2,1 5 2,1 1,22σ = ⋅ − + ⋅ − + ⋅ − + ⋅ − ≈
Die Standardabweichung des rechten Glücksrades ist:
( ) ( ) ( ) ( )2 2 2 234 2 110 10 10 100 2,1 1 2,1 4 2,1 10 2,1 3,01σ = ⋅ − + ⋅ − + ⋅ − + ⋅ − ≈
Wenn man Freude am Risiko hat, sollte man also das rechte Glücksrad wählen
Abb. 8
1€€
2€€
3€€
4€€
0€€
1€€
4€€
10€€

Bjarne Kolb Lernen für das Abitur – Stochastik Seite 17
Binomialverteilungen Bei der Produktion der TI-84+ Taschenrechner stellt Texas Instruments eine Fehlerquote von exakt 0,5% fest. Gehen Sie davon aus, dass die Quote sich nicht ändert. Prüfen Sie, bei welcher der folgenden Situationen eine binomiale Verteilung vorliegt und lösen Sie die dazugehörige Fragestellung.
A Bei einer Stichprobe von 1000 Taschenrechnern werden tatsächlich die erwarteten 5 defekten Geräte gefunden. Bestimmen Sie die Wahrscheinlichkeitsverteilung für die Anzahl der defekten Geräte, wenn man von den 1000 Taschenrechnern zufällig 10 auswählt und zeichnen Sie das Histogramm mit dem GTR
B Bei einer anderen Stichprobe werden wieder 10 Taschenrechner betrachtet, aber direkt und nicht erst nach einer Vorauswahl von 1000 Geräten, die Anzahl der Defekte ist demnach noch unbekannt. Bestimmen Sie die Wahrscheinlichkeitsverteilung für die Anzahl der unbrauchbaren Geräte und lassen Sie das entsprechende Histogramm zeichnen
In beiden Situationen ergeben sich nur zwei Möglichkeiten, ein funktionierender oder ein defekter Rechner. In dieser Hinsicht könnten beide Fälle binomialverteilt sein. Bei A ändert sich allerdings die Wahrscheinlichkeit nach jedem ausgewählten Taschenrechner, bei B hingegen bleibt die Wahrscheinlichkeit konstant. Damit ist B der (zumindest in der Theorie) binomialverteilte Fall
Die Wahrscheinlichkeitsverteilung erhält man mit binompdf(10,0.005) auf dem Taschenrechner. Mit diesen Werten in einer Liste und den Werten von 0 bis 10 in einer anderen Liste kann man dann über STATPLOT ein Histogramm zeichnen lassen. (Die Wahrscheinlichkeiten sind in L2 und die Werte in L1)
Abb. 9

Bjarne Kolb
x
y
Stochastik II
Schließende Statistik Normalverteilung
Lernen für das Abitur

Bjarne Kolb Lernen für das Abitur – Stochastik 2
Inhalt
- Schließende Statistik Seite 3 - Stetige Zufallsgrößen Seite 10 - Normalverteilung Seite 11 - Beispielaufgaben Seite 13

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 3
Schließende Statistik Die schließende Statistik ist ein eigener Bereich der Stochastik, bei der man sich mit Stichproben beschäftigt. Es geht darum, die Qualität von Stichproben einzuschätzen sowie Rückschlüsse aus Stichproben zu ziehen und Prognosen für Stichproben zu erstellen.
Notwendig ist dieses Thema, weil man zwar bei Statistiken theoretisch auch nur den Erwartungswert angeben könnte, die Wahrscheinlichkeit, dass genau der Erwartungswert eintrifft, aber selten über 10% liegt. Deswegen wäre es sehr ungenau, nur einen exakten Wert anzugeben und man hat sich dafür entschieden, Intervalle anzugeben.
- Sicherheitsintervalle:
Bei den Sicherheitsintervallen handelt es sich um den Schluss von der Gesamtheit auf die Stichprobe. Die Wahrscheinlichkeit ist bekannt, man will ein Intervall bestimmen, in dem das Ergebnis einer Stichprobe mit einer bestimmten Wahrscheinlichkeit liegt.
- Konfidenzintervalle
Bei den Konfidenzintervallen dagegen handelt es sich um den Schluss von der Stichprobe auf die Gesamtheit. Man hat eine Stichprobe mit bekanntem Ergebnis und soll einen Bereich angeben, in dem sich die Wahrscheinlichkeit befindet.
- Stichprobenumfang
Ein dritter Bereich der schließenden Statistik beschäftigt sich mit einem geeigneten Stichprobenumfang. Führt man eine Stichprobe mit zu geringem Umfang durch, wird das Ergebnis nicht aussagekräftig. Deswegen bestimmt man einen Stichprobenumfang, der ausreichend ist, damit die Abweichung (natürlich nur wieder mit einer gewissen Wahrscheinlichkeit) maximal einen bestimmten Wert (den man auch festlegen muss) hat.
- Sigma-Regeln
Damit man bei diesen Berechnungen den Aufwand minimieren kann, setzt man nach Möglichkeit die Sigma-Regeln ein.
Bereich Wahrscheinlichkeit Bereich Wahrscheinlichkeit 1µ σ±
68,3% 1,64µ σ±
90%
2µ σ±
95,5% 1,96µ σ±
95% 3µ σ±
99,7% 2,58µ σ±
99%
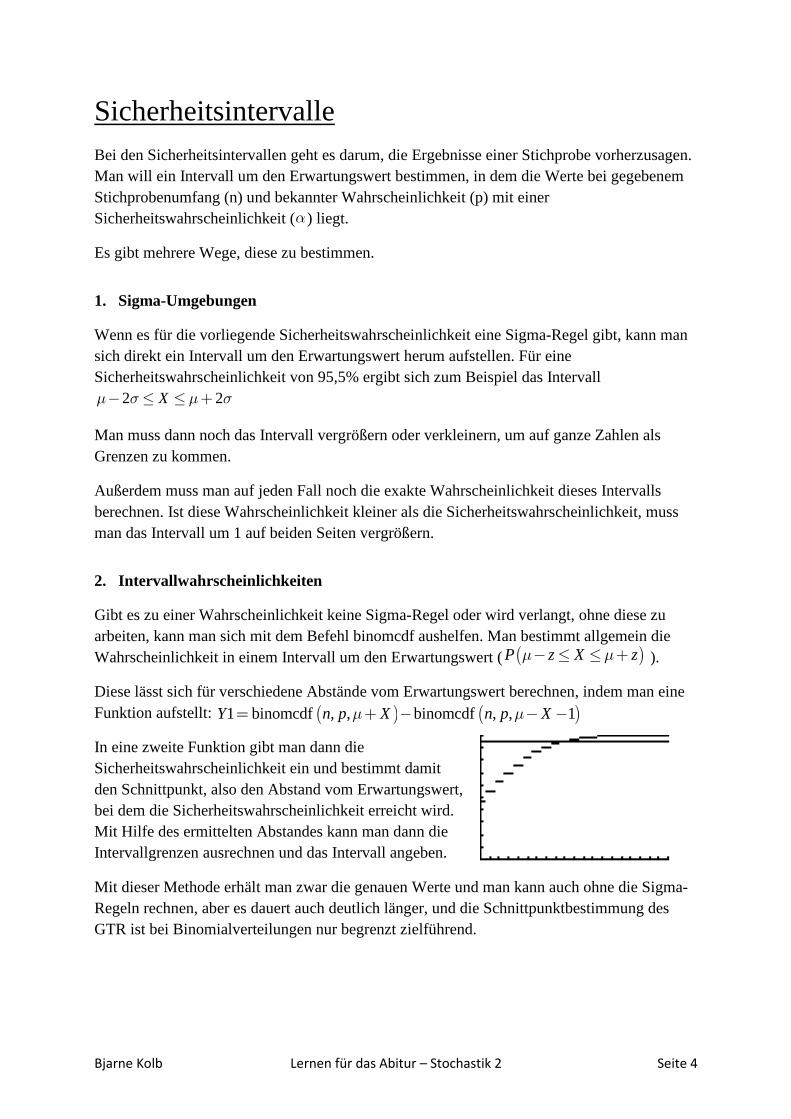
Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 4
α
( )P z X zµ µ− ≤ ≤ +
( ) ( )1 binomcdf , , binomcdf , , 1Y n p X n p Xµ µ= + − − −
Sicherheitsintervalle Bei den Sicherheitsintervallen geht es darum, die Ergebnisse einer Stichprobe vorherzusagen. Man will ein Intervall um den Erwartungswert bestimmen, in dem die Werte bei gegebenem Stichprobenumfang (n) und bekannter Wahrscheinlichkeit (p) mit einer Sicherheitswahrscheinlichkeit ( ) liegt.
Es gibt mehrere Wege, diese zu bestimmen.
1. Sigma-Umgebungen
Wenn es für die vorliegende Sicherheitswahrscheinlichkeit eine Sigma-Regel gibt, kann man sich direkt ein Intervall um den Erwartungswert herum aufstellen. Für eine Sicherheitswahrscheinlichkeit von 95,5% ergibt sich zum Beispiel das Intervall
2 2Xµ σ µ σ− ≤ ≤ +
Man muss dann noch das Intervall vergrößern oder verkleinern, um auf ganze Zahlen als Grenzen zu kommen.
Außerdem muss man auf jeden Fall noch die exakte Wahrscheinlichkeit dieses Intervalls berechnen. Ist diese Wahrscheinlichkeit kleiner als die Sicherheitswahrscheinlichkeit, muss man das Intervall um 1 auf beiden Seiten vergrößern.
2. Intervallwahrscheinlichkeiten
Gibt es zu einer Wahrscheinlichkeit keine Sigma-Regel oder wird verlangt, ohne diese zu arbeiten, kann man sich mit dem Befehl binomcdf aushelfen. Man bestimmt allgemein die Wahrscheinlichkeit in einem Intervall um den Erwartungswert ( ).
Diese lässt sich für verschiedene Abstände vom Erwartungswert berechnen, indem man eine Funktion aufstellt:
In eine zweite Funktion gibt man dann die Sicherheitswahrscheinlichkeit ein und bestimmt damit den Schnittpunkt, also den Abstand vom Erwartungswert, bei dem die Sicherheitswahrscheinlichkeit erreicht wird. Mit Hilfe des ermittelten Abstandes kann man dann die Intervallgrenzen ausrechnen und das Intervall angeben.
Mit dieser Methode erhält man zwar die genauen Werte und man kann auch ohne die Sigma-Regeln rechnen, aber es dauert auch deutlich länger, und die Schnittpunktbestimmung des GTR ist bei Binomialverteilungen nur begrenzt zielführend.

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 5
α
20 25 30 35 40 45 50 55
x
pmin k
35 40 45 50 55 60 65 70
x
pmax
Abb. 2
k
Konfidenzintervalle In der Realität weiß man nur selten die Gesamtwahrscheinlichkeit, meistens führt man eine Stichprobe durch und soll daraus dann die Wahrscheinlichkeit ermitteln. Man soll also aus einer Stichprobe mit gegebenem Umfang (n) und Ergebnis (k) bestimmen, welche Wahrscheinlichkeiten p bei der jeweiligen Sicherheitswahrscheinlichkeit ( ) mit dem Stichprobenergebnis verträglich sind.
Die Berechnung ist deutlich komplexer, weil man über die Sicherheitsintervalle der einzelnen Wahrscheinlichkeiten argumentieren muss: Jede mögliche Wahrscheinlichkeit hat bei gegebenem Stichprobenumfang ein eigenes Sicherheitsintervall:
Gesucht werden zwei Wahrscheinlichkeiten: Bei der einen soll das Stichprobenergebnis am oberen Rand des Sicherheitsintervalls liegen, bei der anderen am unteren Rand. Damit erhält man die minimale und die maximale Wahrscheinlichkeit des Konfidenzintervalls.
Diese beiden Wahrscheinlichkeiten muss man also bestimmen, um das Konfidenzintervall zu erhalten. Dafür gibt es verschiedene Ansätze, bei deren Auswahl man zwischen Genauigkeit und Zeitaufwand abwägen muss.
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
-0,02
0,02
0,04
0,06
0,08
0,1
0,12
0,14
x
p=0,3p=0,5
p=0,8
Abb. 1

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 6
25 30 35 40 45 50 55
x
Abb. 3
90%
1. Sigma-Umgebungen
Man kann auch bei Konfidenzintervallen mit den Sigma-Regeln arbeiten, nur nicht so direkt. Dabei geht man vom gleichen Ansatz aus:
( )P c X cµ σ µ σ α− ≤ ≤ + ≈
Weil die Wahrscheinlichkeit aber noch unbekannt ist, kann man Erwartungswert und Standardabweichung nicht berechnen, sondern nur die Formel einsetzen:
( ) ( )( )1 1P n p c n p p X n p c n p p α⋅ − ⋅ ⋅ − ≤ ≤ ⋅ + ⋅ ⋅ − ≈
Jetzt setzt man das Stichprobenergebnis einzeln mit den beiden Grenzen gleich, um die Grenzen des Konfidenzintervalls zu bestimmen:
( ) ( )1 und 1n p c n p p k n p c n p p k⋅ − ⋅ ⋅ − = ⋅ + ⋅ ⋅ − =
Um sich unnötige Rechenarbeit zu sparen, kann man diese Gleichungen graphisch lösen:
( )
( )
1 1
2 1
3
Y n X c n X X
Y n X c n X X
Y k
= ⋅ − ⋅ ⋅ −
= ⋅ + ⋅ ⋅ −
=
Mit |2nd|CALC| 5:intersect lässt man sich die minimale und maximale Wahrscheinlichkeit bestimmen.
2. Randwahrscheinlichkeiten
Wenn man wie bei den Sicherheitsintervallen ohne die Sigma-Regeln arbeiten will oder muss, steht man vor einem Problem: Man weiß zwar, dass jeweils eine Grenze dem Stichprobenergebnis entspricht, aber die andere Grenze ist nicht bekannt. Daher muss man sich etwas aushelfen:
Wenn man z.B. das 90%-Sicherheitsintervall betrachtet, ergibt sich folgendes Bild:

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 7
25 30 35 40 45 50 55
x
Abb. 4
90% 5%5%
µµ kkU O
Geht man jetzt davon aus, dass die Verteilung symmetrisch ist (was aber nur selten genau stimmt), kann man sagen, dass sich jeweils 5% an den Seiten neben dem Intervall liegen:
Man kann erkennen, dass, wenn k die Untergrenze bildet, 5% der Werte kleiner sind als k. Wenn k die Obergrenze bildet, sind es 95% der Werte. Also kann man folgende Gleichungen aufstellen:
( ) ( )0,05 und 0,95P X k P X k≤ = ≤ =
Allgemein (für andere Sicherheitswahrscheinlichkeiten) ergibt sich:
( ) ( )1 1 und
2 2P X k P X k
α α− +≤ = ≤ =
Auch bei diesen Berechnungen ist es sinnvoll, graphisch vorzugehen:
( )1 , ,
12
21
32
Y binomcdf n X k
Y
Y
α
α
=
−=
+=
3. Intervallwahrscheinlichkeiten
Will man vorgehen, ohne eine Symmetrie vorauszusetzen, muss man es schaffen, die jeweils andere Grenze zu ermitteln. Zunächst hat man nur das Stichprobenergebnis als Grenze:
Dann bestimmt man den Abstand zwischen Erwartungswert und der bekannten Grenze. Zu der anderen Grenze muss der Erwartungswert den gleichen Abstand haben.
µµ kkU O
k-µk-µ µ-k µ-k

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 8
µµ kk2µ-k 2µ-k
k-µk-µ µ-k µ-k
( ) 2U k kµ µ µ= − − = − ( ) 2O k kµ µ µ= + − = −
Jetzt kann man die Grenze berechnen:
Dadurch ergibt sich für die Wahrscheinlichkeit in diesem Intervall:
( ) ( )2 bzw. 2P k X k P k X kµ µ− ≤ ≤ ≤ ≤ −
Diese Wahrscheinlichkeiten muss man so bestimmen, dass sie der Sicherheitswahrscheinlichkeit entsprechen:
( ) ( )2 = bzw. 2P k X k P k X kµ α µ α− ≤ ≤ ≤ ≤ − =
Auch diese Gleichungen sollte man graphisch lösen:
( ) ( )( ) ( )
1 binomcdf , , binomcdf , , 2 1
2 binomcdf , , 2 binomcdf , , 1
3
Y n X k n X nX k
Y n X nX k n X k
Y α
= − − −
= − − −
=
4. GTR-Befehl
Will man sich gar keine Mühe geben, kann man eine Funktion des Taschenrechners verwenden. Der Befehl 1-PropZInt… unter |STAT|TESTS verlangt die Angabe des Stichprobenergebnisses (x), des Stichprobenumfangs (n) und der Sicherheitswahrscheinlichkeit (C-Level).
Eingabe: Ergebnis:
Obwohl die Anwendung dieses Befehls meistens nach der Aufgabenstellung nicht ausreichend ist, weil der Rechenweg nicht erkennbar ist, kann man 1-PropZInt… gut zur Kontrolle der Ergebnisse verwenden, weil die Funktion sehr schnell funktioniert.

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 9
k µ−α
Stichprobenumfang Führt man eine Stichprobe mit zu geringem Umfang durch, wird die Standardabweichung zu groß und die Stichprobe nicht aussagekräftig. Deshalb ist es sinnvoll, sich zu überlegen, wie groß eine Stichprobe angelegt werden muss.
Es geht also darum, einen minimalen Stichprobenumfang (n) zu bestimmen, sodass die Abweichung des Stichprobenergebnisses vom Erwartungswert ( ) mit einer bestimmten Sicherheit ( ) kleiner ist als ein selbst festgelegter Anteil (d) des Stichprobenumfangs:
k d nµ− ≤ ⋅
Durch die Sigma-Regeln kann man für den Abstand der Stichprobe vom Erwartungswert angeben:
k cµ σ− ≤ ⋅
Dadurch ergibt sich insgesamt die Ungleichung:
k c d nµ σ− ≤ ⋅ ≤ ⋅
Stellt man diese Ungleichung nach n um, erhält man eine Formel für den nötigen Mindestumfang einer aussagekräftigen Stichprobe:
( )2
1c
n p pd
≥ ⋅ ⋅ −
Wenn man für die Wahrscheinlichkeit eine ungefähre Prognose gegeben hat, etwa durch eine bereits durchgeführte, kleinere Stichprobe, kann man mit dieser Formel arbeiten. Wenn die Wahrscheinlichkeit völlig unbekannt ist, muss man vom ungünstigsten Fall p=0,5 ausgehen. In diesem Fall ist der benötigte Umfang am größten. So ergibt sich dann für den Stichprobenumfang:
2
0,25c
nd
≥ ⋅
Auf die Bestimmung des nötigen Stichprobenumfangs ohne die Sigma-Regeln werde ich verzichten, weil man es mit dem Aufwand, den man sich macht, auch übertreiben kann.

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 10
−∞ ∞
Stetige Zufallsgrößen Die Besonderheit, die stetige Zufallsgrößen von den bisher bekannten unterscheidet ist im Namen schon enthalten. Sie können nicht nur ganze Zahlen annehmen, wie z.B. Binomialverteilungen, sondern sind stetig, können also in ihrem definierten Bereich jeden beliebigen Wert annehmen.
Aus diesem Grund muss man stetige Zufallsgrößen leicht anders behandeln als andere Zufallsgrößen.
Weil es unendlich viele verschiedene Werte gibt, die die Zufallsgröße annehmen kann, sind die einzelnen Wahrscheinlichkeiten unendlich klein. Deshalb kann man keine einzelnen Wahrscheinlichkeiten angeben, sondern nur Intervallwahrscheinlichkeiten.
Man gibt deshalb auch statt einer Funktion für die Wahrscheinlichkeiten die sogenannte Dichtefunktion an, deren Integrale die Wahrscheinlichkeiten angeben. Eine Dichtefunktion hat zwei Bedingungen. Erstens darf die Dichtefunktion an keiner Stelle negativ sein, zweitens muss die gesamte Fläche unter der Dichtefunktion, also das Integral von bis , 1 betragen.
Da es bei manchen Dichtefunktionen schwer bzw. mit den in der Schule gelernten Methoden unmöglich ist, die Stammfunktion zu bilden, lässt man das Integral vom GTR berechnen. Dabei erhält man ein weiteres Problem, wenn man nach oben oder unten unbegrenzte Wahrscheinlichkeiten bestimmen soll. Man kann im Taschenrechner aber nur begrenzte Integrale bestimmen lassen. Deswegen muss man sich dann eine genügend große bzw. kleine Grenze suchen, sodass die Wahrscheinlichkeiten so wenig wie möglich abweichen.
- Erwartungswert
Der Erwartungswert einer stetigen Zufallsgröße wird wie der von anderen Zufallsgrößen berechnet, indem man die einzelnen Werte mit den Wahrscheinlichkeiten multipliziert, nur nicht ganz so einfach:
( )x f x dxµ
∞
−∞
= ⋅∫
- Standardabweichung
Die Standardabweichung wird ebenfalls parallel zu der Standardabweichung anderer Zufallsgrößen berechnet:
( ) ( ) ( )2 2 2x f x dx x f x dxσ µ µ
∞ ∞
−∞ −∞
= − ⋅ = ⋅ −∫ ∫

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 11
( )21
20;1
1
2
xx eϕ
π
−= ⋅
( ) ( )0;1 0;1
x
x t dtϕ
−∞
Φ = ∫
Normalverteilung Die wichtigste Art der stetigen Zufallsgrößen ist die Normalverteilung. Mathematisch gesehen ist ihre Dichtefunktion eine e-Funktion mit einer quadratischen Funktion im Exponenten, sie hängt von dem Erwartungswert und der Standardabweichung ab:
( )21
2;
1
2
x
x eµ
σ
µ σϕ
σ π
− − ⋅ = ⋅
Charakteristisch für die Normalverteilung ist die Form ihrer Dichtefunktion, eine Glockenkurve:
Der Erwartungswert bestimmt dabei die Lage der Glockenkurve, die Standardabweichung die Breite und damit auch die Höhe, weil der gesamte Flächeninhalt 1 betragen muss. Eine weitere Besonderheit der Normalverteilung ist, dass sie symmetrisch zum Erwartungswert ist.
Wählt man als Erwartungswert 0 und als Standardabweichung 1, erhält man eine spezielle Normalverteilung. Die Funktion ist die Gaußsche Dichtefunktion,
die Gaußsche Verteilungsfunktion.
Anwenden kann man die Normalverteilung an vielen alltäglichen Problemen oder Fragen, wie dem Gewicht eines Brötchens, aber auch im wissenschaftlichen Bereich bei der Berechnung von Messfehlern. Außerdem kann man die Binomialverteilung durch die Normalverteilung annähern, um einfacher rechnen zu können.
-3,5 -3 -2,5 -2 -1,5 -1 -0,5 0,5 1 1,5 2 2,5 3 3,5
-0,1
0,1
0,2
0,3
0,4
0,5
x
y
Abb. 5

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 12
−∞( )P X k α≤ =
Der GTR hat für Normalverteilungen drei spezielle Funktionen. Diese findet man im Menü DISTR unter |2nd|VARS|
normalpdf liefert einen Wert der Dichtefunktion und ist dabei für Berechnungen in den meisten Fällen ungeeignet. Der Taschenrechner fragt bei dieser Funktion den Erwartungswert und die Standardabweichung, durch die eine einzelne Normalverteilung ausgewählt wird, außerdem muss man angeben, an welcher Stelle man den Wert der Dichtefunktion wissen will:
Eingabe: Ergebnis:
normalcdf dagegen liefert die Wahrscheinlichkeit in einem bestimmten Intervall. Man muss dafür wieder Erwartungswert und Standardabweichung angeben, aber auch die Untergrenze und die Obergrenze des Bereiches, in dem die Wahrscheinlichkeit bestimmt werden soll. Hat man ein nach oben oder unten offenes Intervall, muss man sich einen sehr großen bzw. sehr kleinen Wert suchen, der sich deutlich vom Erwartungswert unterscheidet, damit man ungefähr die gesuchte Wahrscheinlichkeit erhält:
Eingabe: Ergebnis:
invNorm ist die zweite nützliche Funktion, die der Taschenrechner bietet. Es wird nicht die Wahrscheinlichkeit zu einem Intervall bestimmt, sondern ein Intervall zu einer bestimmten Wahrscheinlichkeit. Die Untergrenze dieses Intervalls ist allerdings schon vorher festgelegt bei . Demnach lässt sich diese Taschenrechner-Funktion nur anwenden, wenn man die Wahrscheinlichkeit in der Form gegeben hat. Der Taschenrechner verlangt auch wieder die Eingabe von Erwartungswert und Standardabweichung, diesmal muss man zusätzlich die Fläche angeben:
Eingabe: Ergebnis:

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 13
Schließende Statistik Eine Fluggesellschaft möchte herausfinden, wie viele Plätze bei ihren Flügen leer bleiben.
a) Wie viele von 1000 Personen werden mit 95%-iger Sicherheit mitfliegen, wenn man davon ausgeht, dass 10% der Buchungen abgesagt werden?
b) Bei den 1000 betrachteten Passagieren sind tatsächlich nur 880 angetreten. Wie groß ist der Anteil der tatsächlich geflogenen Passagiere mit 95%-iger Sicherheit?
c) Die Fluggesellschaft will den Anteil der erschienenen Fluggäste mit einer Abweichung von höchstens 1% angeben (Sicherheitswahrscheinlichkeit 95%). Wie viele Buchungen müssen dabei untersucht werden? Wie viele Buchungen muss man untersuchen, wenn eine vorherige Untersuchung die besagte Absagequote von 10% ergeben hat? Wie groß ist die prozentuale Ersparnis im zweiten Fall?
X: Anzahl der erschienenen Fluggäste a) A Sigma-Regeln Nach den Sigma-Regeln liegen etwa 95% der Werte in einem Bereich von 1,96σ um den Erwartungswert. ( )
( )
( )( )
1,96 1,96 95%
1000 0,9 900
1 1000 0,9 0,1 90 9,49
900 1,96 90 900 1,96 90 95%
881 919 95%
P X
n p
n p p
P X
P X
µ σ µ σ
µ
σ
− ≤ ≤ + ≈
= ⋅ = ⋅ =
= ⋅ ⋅ − = ⋅ ⋅ = ≈
− ⋅ ≤ ≤ + ⋅ ≈
≤ ≤ ≈
Test: ( ) ( ) ( )
( ) ( )881 919 919 880
1000,0.9,919 1000,0.9,880 0,9604
P X P X P X
binomcdf binomcdf
≤ ≤ = ≤ − ≤
= − ≈
Es erscheinen mit 95%-iger Sicherheit zwischen 881 und 919 Personen.

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 14
( )
( )
1 1000 1,96 1000 1
2 1000 1,96 1000 1
3 880
Y X X X
Y X X X
Y
= − ⋅ −
= + ⋅ −
=
B Intervallwahrscheinlichkeiten Will man ohne die Sigma-Regeln arbeiten, ersetzt man diesen festen Abstand durch einen allgemeinen Abstand x vom Erwartungswert: ( )( )
0,95
900 900 0,95
P x X x
P x X x
µ µ− ≤ ≤ + =
− ≤ ≤ + =
Diese Gleichung sollte man graphisch lösen:
( )( ) ( )( )1 1000,0.9,900 int 1000,0.9,900 int 1
2 0,95
Y binomcdf X binomcdf X
Y
= + − − −
=
Mit der Schnittpunktbestimmung des GTR (2nd|CALC|5: intersect) kann man sich den Abstand x vom Erwartungswert bestimmen lassen. Damit erhält man den Bereich
[ ] [ ]900 19;900 19 881;919I = − + =
Es werden mit 95% Wahrscheinlichkeit zwischen 881 und 919 Personen erscheinen. b) A Sigma-Regeln Im Intervall [ ]1,96 ; 1,96µ σ µ σ− + liegen nach den Sigma-Regeln 95% der Werte. Um das
Konfidenzintervall zu bestimmen, muss man die zwei Wahrscheinlichkeiten finden, bei denen das Stichprobenergebnis einer der Grenzen entspricht:
( ) ( )
( ) ( )
1,96 1,96 1 1000 1,96 1000 1 880
1,96 1,96 1 1000 1,96 1000 1 880
k n p n p p k p p p
k n p n p p k p p p
µ σ
µ σ
− = ⇔ ⋅ − ⋅ ⋅ ⋅ − = ⇔ − ⋅ − =
+ = ⇔ ⋅ + ⋅ ⋅ ⋅ − = ⇔ + ⋅ − =
Diese Gleichungen kann man graphisch lösen: Man muss wieder die Schnittpunktbestimmung des GTR durchführen (2nd|CALC|5: intersect)
Der Anteil der erschienenen Passagiere liegt zu 95% zwischen 0,8584 und 0,8987
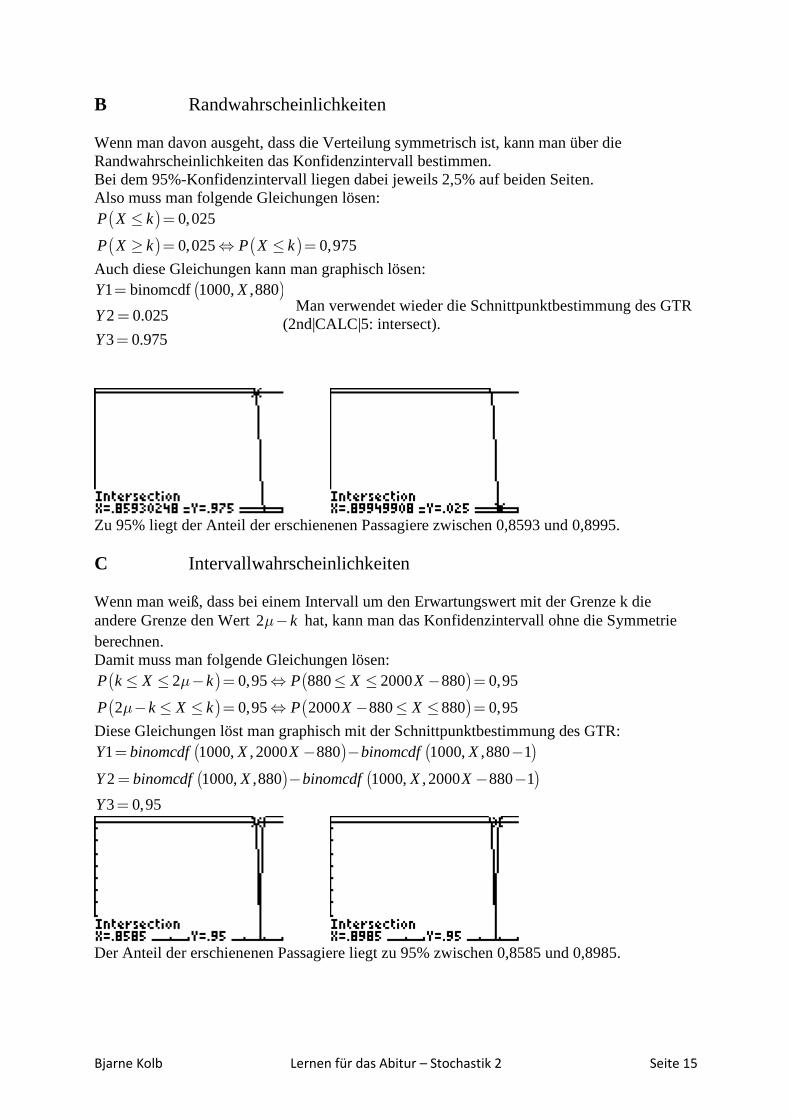
Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 15
( )1 binomcdf 1000, ,880
2 0.025
3 0.975
Y X
Y
Y
=
=
=
B Randwahrscheinlichkeiten Wenn man davon ausgeht, dass die Verteilung symmetrisch ist, kann man über die Randwahrscheinlichkeiten das Konfidenzintervall bestimmen. Bei dem 95%-Konfidenzintervall liegen dabei jeweils 2,5% auf beiden Seiten. Also muss man folgende Gleichungen lösen: ( )( ) ( )
0,025
0,025 0,975
P X k
P X k P X k
≤ =
≥ = ⇔ ≤ =
Auch diese Gleichungen kann man graphisch lösen: Man verwendet wieder die Schnittpunktbestimmung des GTR
(2nd|CALC|5: intersect).
Zu 95% liegt der Anteil der erschienenen Passagiere zwischen 0,8593 und 0,8995. C Intervallwahrscheinlichkeiten Wenn man weiß, dass bei einem Intervall um den Erwartungswert mit der Grenze k die andere Grenze den Wert 2 kµ− hat, kann man das Konfidenzintervall ohne die Symmetrie berechnen. Damit muss man folgende Gleichungen lösen: ( ) ( )( ) ( )
2 0,95 880 2000 880 0,95
2 0,95 2000 880 880 0,95
P k X k P X X
P k X k P X X
µ
µ
≤ ≤ − = ⇔ ≤ ≤ − =
− ≤ ≤ = ⇔ − ≤ ≤ =
Diese Gleichungen löst man graphisch mit der Schnittpunktbestimmung des GTR: ( ) ( )( ) ( )
1 1000, ,2000 880 1000, ,880 1
2 1000, ,880 1000, ,2000 880 1
3 0,95
Y binomcdf X X binomcdf X
Y binomcdf X binomcdf X X
Y
= − − −
= − − −
=
Der Anteil der erschienenen Passagiere liegt zu 95% zwischen 0,8585 und 0,8985.

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 16
D GTR-Funktion Wenn man keine Vorgaben zu dem Rechenweg hat, kann man auch einfach die GTR-Funktion zu Konfidenzintervallen bei Binomialverteilungen, 1-PropZInt..., nutzen. Man bestimmt das Konfidenzintervall mit einer Sicherheitswahrscheinlichkeit von 95%, dem Stichprobenumfang n=1000 und dem Stichprobenergebnis k=880 Zu 95% liegt der Anteil der erschienenen Passagiere zwischen 0,8599 und 0,9001. c)
Wenn man keinen Näherungswert für die Wahrscheinlichkeit hat, muss man vom ungünstigsten Fall ausgehen und kann den benötigten Stichprobenumfang mit der folgenden Ungleichung berechnen:
2
0,25c
nd
≥ ⋅
c ist der zu der Sicherheitswahrscheinlichkeit passende Sigmafaktor (hier 1,96) und d ist der maximale Abstand vom Erwartungswert (hier 1%=0,01)
21,96
0,25 96040,01
n n ≥ ⋅ ⇔ ≥
Hat man dagegen einen Schätzwert für die Wahrscheinlichkeit gegeben (hier 0,9), kann man den nötigen Stichprobenumfang mit folgender Ungleichung berechnen:
( )2
1c
n p pd
≥ ⋅ ⋅ −
Die Parameter haben dieselbe Bedeutung wie bei der ersten Ungleichung. 2
1,960,9 0,1 3458
0,01n n ≥ ⋅ ⋅ ⇔ ≥
Die prozentuale Ersparnis (a) kann man bestimmen, indem man den Quotienten der beiden Stichprobenumfänge von 1 abzieht:
34581 0,6399 63,99%
9604a= − ≈ =
Man spart sich mit dem Schätzwert fast 64% des Umfangs der Stichprobe ein.

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 17
Stetige Zufallsgrößen
Die Funktion ( )2 für 0,5 0,5
für 0,50
xa xf x
x
− ≤ ≤ −= > ist eine Dichtefunktion.
a) Bestimmen Sie den Parameter a.
b) Bestimmen Sie die Wahrscheinlichkeiten( )0,3 0,2P X− ≤ ≤ , ( )0,4P X≤ und
( )0,1P X≥− .
c) Berechnen Sie Erwartungswert und Standardabweichung.
a)
Für eine Dichtefunktion gilt die Bedingung:
( ) ( ) ( )0,5 0,5 0,5
2 2
0,5 0,5 0,5
1 0 0 1 1f x dx dx a x dx dx a x dx−+∞ +∞
−∞ −∞ − −
= ⇔ + − + = ⇔ − =∫ ∫ ∫ ∫ ∫
Aus dieser Gleichung kann man den Parameter a bestimmen:
( ) ( ) ( )0,5 0,5
32 3 3
0,50,5
1 1 11 1 0,5 0,5 0,5 0,5 1
3 3 3
1 1 1 130,5 0,5 1 1
24 24 12 12
a x dx ax x a a
a a a a
−−
− = ⇔ − = ⇔ ⋅ − ⋅ − ⋅ − − ⋅ − =
− + − = ⇔ − = ⇔ =
∫
b)
( ) ( )
( ) ( )
( ) ( )
0,2 0,22
0,3 0,3
0,4 0,42
0,5
0,52
0,1 0,1
130,3 0,2 0,53
12
130,4 0,912
12
130,1 0,608
12
P X f x dx x dx
P X f x dx x dx
P X f x dx x dx
− −
−∞ −
+∞
− −
− ≤ ≤ = = − =
≤ = = − =
≥− = = − =
∫ ∫
∫ ∫
∫ ∫
c)
( )
( )
0,5 0,52 3
0,5 0,5
0,5 0,52 2 2 2 2 2 4
0,5 0,5
13 130
12 12
13 130 0,2789
12 12
xf x dx x x dx x x dx
x f x dx x x dx x x dx
µ
σ µ
+∞
−∞ − −
+∞
−∞ − −
= = − = − =
= − = − − = − ≈
∫ ∫ ∫
∫ ∫ ∫

Bjarne Kolb Lernen für das Abitur – Stochastik 2 Seite 18
Normalverteilung a) Geben Sie die Funktionsgleichung der Dichtefunktion einer Normalverteilung mit 10µ=
und 2σ = an.
b) Bestimmen Sie die Wahrscheinlichkeiten( )7 11P X≤ ≤ , ( )9P X≤ und ( )12P X≥ .
c) Geben Sie die Werte an, die größer sind als 30%, 75% und 95% aller Werte.
a)
( )21 10
2 210;2
1
2 2
x
x eϕ
π
− − ⋅ = ⋅
b)
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
11
10;2
7
9
10;2
10;2
12
7 11 7,11,10,2 0,6247
9 1 99,9,10,2 0,3085
12 12,1 99,10,2 0,1587
P X x dx normalcdf
P X x dx normalcdf E
P X x dx normalcdf E
ϕ
ϕ
ϕ
−∞
+∞
≤ ≤ = = ≈
≤ = ≈ − ≈
≥ = ≈ ≈
∫
∫
∫
c)
30%: ( ) ( )10;2 0,3 invNorm 0.3,10,2 8,95x
t dt xϕ
−∞
= ⇒ = ≈∫
75%: ( ) ( )10;2 0,75 invNorm 0.75,10,2 11,35x
t dt xϕ
−∞
= ⇒ = ≈∫
95%: ( ) ( )10;2 0,95 invNorm 0.95,10,2 13,29x
t dt xϕ
−∞
= ⇒ = ≈∫

Bjarne Kolb
Analytische Geometrie
Vektoren
Lernen für das Abitur

Bjarne Kolb Lernen für das Abitur – Vektoren
Inhalt
- Zusammenfassung Seite 3
- Herleitungen Seite 14
- Beispielrechnungen Seite 20

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 3
Grundlagen – Was sind Vektoren?
Dazu kann man sich erst einmal eine Definition von Vektoren anschauen
Ein Vektor ist ein geometrisches Objekt, das die Verschiebung eines Punktes auf einen anderen im n-dimensionalen Raum angibt
Jetzt hat man eine Definition, aber mathematische Definitionen kann man nicht verstehen Fangen wir am Anfang an
ein geometrisches Objekt Ja gut, Vektoren kann man zeichnen, der Teil ist einfach
die Verschiebung eines Punktes auf einen anderen Erst einmal brauchen wir also zwei Punkte
Jetzt schieben wir den ersten Punkt auf den zweiten
Und noch der letzte Teil
im n-dimensionalen Raum Vektoren kann man in beliebig vielen Richtungen (Dimensionen) verwenden, normalerweise benutzt man sie aber nur im Raum (3 Dimensionen), manchmal auch in der Ebene (2 Dimensionen) Eine wichtige Eigenschaft von Vektoren ist noch, dass sie, obwohl sie durch zwei Punkte definiert wurden, ortsunabhängig sind, d.h. die Lage der Vektoren ist nicht entscheidend
P1
P2
Abb. 1
P1
P2
Abb. 2

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 4
– Zeichnen von Vektoren Man zeichnet einen Vektor als geraden Pfeil zwischen zwei Punkten. Die Pfeilspitze zeigt dabei auf den zweiten Punkt (Abb. 2). Meistens werden Vektoren in ein kartesisches Koordinatensystem gezeichnet:
– Notation und Benennung von Vektoren
Man schreibt bei Vektoren alle Koordinaten übereinander in eine große Klammer. Für die Namen verwendet man Kleinbuchstaben oder die Namen der beteiligten Punkte, z.B.: , , , ,a x v AB PQ
� � � ���� ����
– Besondere Vektoren
o Nullvektor ein Vektor der Länge 0, also quasi ein nicht existenter Vektor
o Einheitsvektor ein Vektor mit der Länge 1, wird verwendet, um eine Richtung ohne Rücksicht auf die Länge anzugeben
o Ortsvektor gibt die Koordinaten eines Punktes als Vektor an, um
damit rechnen zu können. Zu a�
gehört der Punkt
( )3 2 4A −
1
2
3
x
x
x
0
0
0
o
=
�
1
0
0
e
=
�
3
2
4
a
= −
�
x2
x3
x1
x
yEbene: Raum:
Abb. 3

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 5
Rechnen mit Vektoren Vektoren kann man leicht addieren/subtrahieren oder mit einem Faktor multiplizieren Rechenoperation Geometrisch Rechnerisch
Addition
a b+� �
Die Vektoren aneinander hängen
a b
a + b
→→→→ →→→→
→→→→ →→→→
A b b . 4
Die einzelnen Koordinaten addieren
1 1 1 1
2 2 2 2
3 3 3 3
a b a b
a b a b a b
a b a b
+ + = + = + +
� �
Subtraktion
a b−� �
Pfeil zwischen den vom gleichen Startpunkt aus gezeichneten Vektoren, die Pfeilspitze zeigt auf den Minuenden
Die einzelnen Koordinaten subtrahieren
1 1 1 1
2 2 2 2
3 3 3 3
a b a b
a b a b a b
a b a b
− − = − = − −
� �
Multiplikation
2 b⋅�
a−�
Vektor um den Faktor verlängern, bei negativem Vorzeichen umdrehen
Die einzelnen Koordinaten mit dem Faktor multiplizieren
1 1
2 2
3 3
2
2 2 2
2
b b
b b b
b b
⋅ = ⋅ =
�
1 1
2 2
3 3
a a
a a a
a a
− − = − = − −
�
Kombiniert man diese Rechenoperationen, erhält man eine so genannte Linearkombination,
z.B. a v b u c w⋅ + ⋅ + ⋅� � ��
a
b
a-b
→→→→
→→→→
→→→→ →→→→
Abb. 5
a
-a
b
b
2b→→→→
→→→→
→→→→
→→→→
→→→→
Abb. 6

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 6
Wie geht man dann mit einer Linearkombination um? Rechnerisch: Alle Rechenoperationen für jede Koordinate einzeln durchführen:
1 1 1 1 1 1
2 2 2 2 2 2
3 3 3 3 3 3
2 3
2 3 2 3 2 3
2 3
a b c a b c
v a b c a b c a b c
a b c a b c
+ − = + − = + − = + − + −
� � � �
Geometrisch: Beim Zeichnen von Linearkombinationen gibt es zwei verschiedene Wege
1. Alle Vektoren aneinander hängen. Dabei um den Faktor verlängern und gegebenenfalls umdrehen
2. Alle Vektoren mit positivem Faktor um diesen verlängern und aneinander hängen. Vom gleichen Startpunkt aus auch alle Vektoren mit negativem Faktor aneinander hängen. Diese müssen vorher um den Betrag des Faktors verlängert werden
Der Ergebnisvektor ist der Pfeil zwischen den Spitzen der beiden Pfeilketten, die Spitze des neuen Pfeils muss dabei auf die Spitze der Vektorkette mit den positiven Faktoren zeigen
→→→→
→→→→→→→→
→→→→
→→→→
→→→→
→→→→
a
a
b
b
b
-cv
Abb. 7
→→→→
→→→→→→→→
→→→→
→→→→
→→→→
→→→→
a
a
b
b
b
cv
Abb. 8
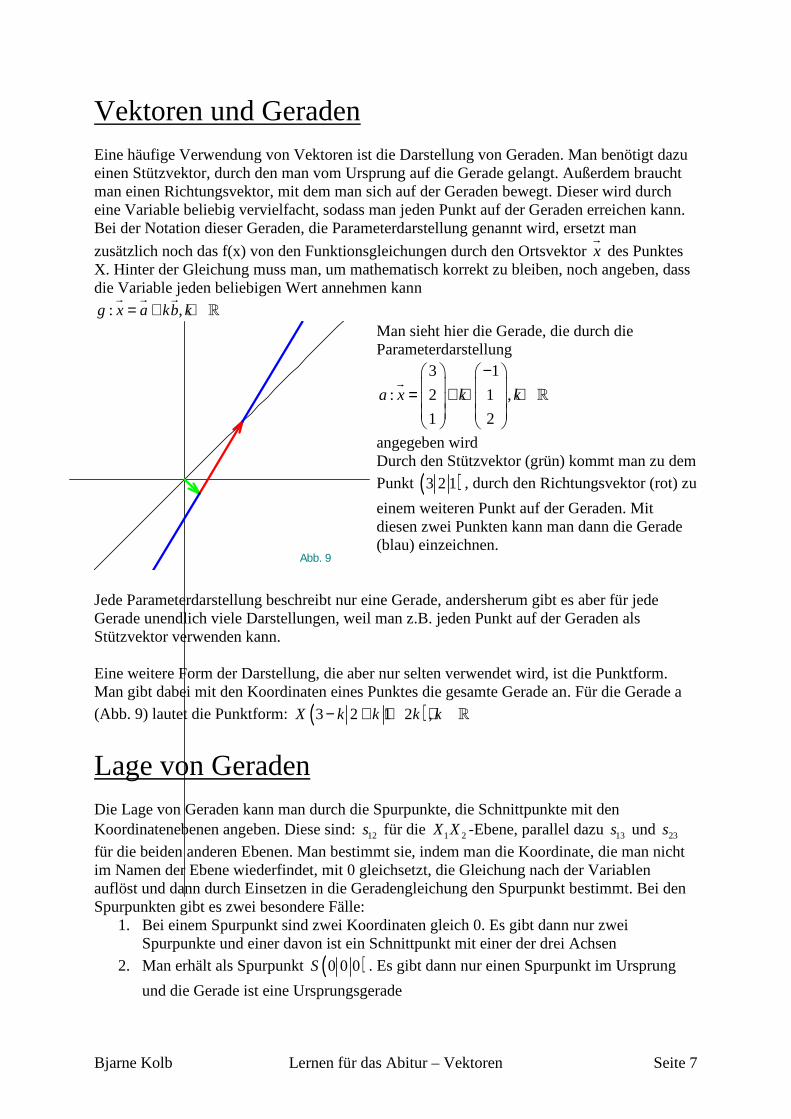
Bjarne Kolb Lernen für das Abitur – Vektoren Seite 7
Vektoren und Geraden Eine häufige Verwendung von Vektoren ist die Darstellung von Geraden. Man benötigt dazu einen Stützvektor, durch den man vom Ursprung auf die Gerade gelangt. Außerdem braucht man einen Richtungsvektor, mit dem man sich auf der Geraden bewegt. Dieser wird durch eine Variable beliebig vervielfacht, sodass man jeden Punkt auf der Geraden erreichen kann. Bei der Notation dieser Geraden, die Parameterdarstellung genannt wird, ersetzt man
zusätzlich noch das f(x) von den Funktionsgleichungen durch den Ortsvektor x�
des Punktes X. Hinter der Gleichung muss man, um mathematisch korrekt zu bleiben, noch angeben, dass die Variable jeden beliebigen Wert annehmen kann
: ,g x a kb k= + ∈� � �
ℝ Man sieht hier die Gerade, die durch die Parameterdarstellung
3 1
: 2 1 ,
1 2
a x k k
− = + ⋅ ∈
�ℝ
angegeben wird Durch den Stützvektor (grün) kommt man zu dem Punkt ( )3 2 1 , durch den Richtungsvektor (rot) zu
einem weiteren Punkt auf der Geraden. Mit diesen zwei Punkten kann man dann die Gerade (blau) einzeichnen.
Jede Parameterdarstellung beschreibt nur eine Gerade, andersherum gibt es aber für jede Gerade unendlich viele Darstellungen, weil man z.B. jeden Punkt auf der Geraden als Stützvektor verwenden kann. Eine weitere Form der Darstellung, die aber nur selten verwendet wird, ist die Punktform. Man gibt dabei mit den Koordinaten eines Punktes die gesamte Gerade an. Für die Gerade a (Abb. 9) lautet die Punktform: ( )3 2 1 2 ,X k k k k− + + ∈ℝ
Lage von Geraden Die Lage von Geraden kann man durch die Spurpunkte, die Schnittpunkte mit den Koordinatenebenen angeben. Diese sind: 12s für die 1 2X X -Ebene, parallel dazu 13s und 23s
für die beiden anderen Ebenen. Man bestimmt sie, indem man die Koordinate, die man nicht im Namen der Ebene wiederfindet, mit 0 gleichsetzt, die Gleichung nach der Variablen auflöst und dann durch Einsetzen in die Geradengleichung den Spurpunkt bestimmt. Bei den Spurpunkten gibt es zwei besondere Fälle:
1. Bei einem Spurpunkt sind zwei Koordinaten gleich 0. Es gibt dann nur zwei Spurpunkte und einer davon ist ein Schnittpunkt mit einer der drei Achsen
2. Man erhält als Spurpunkt ( )0 0 0S . Es gibt dann nur einen Spurpunkt im Ursprung
und die Gerade ist eine Ursprungsgerade
Abb. 9

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 8
Lagebeziehungen zwischen Geraden Die Lage zweier Geraden zueinander hängt von zwei Merkmalen ab
– Schneiden sich die Geraden? => Gleichsetzen der Parameterdarstellungen – Sind die Geraden parallel? => Test, ob die Richtungsvektoren Vielfache sind
Je nachdem, wie man diese beiden Merkmale kombiniert, erhält man vier mögliche Lagebeziehungen Die Geraden schneiden sich Die Geraden schneiden sich nicht Die Geraden sind parallel
Identisch
A b b . 1 0
Parallel
Die Geraden sind nicht parallel
Schneiden sich
Windschief
Man muss bei dem Thema Lagebeziehungen aufpassen, weil parallele Geraden zwar auch parallel gezeichnet werden, wenn man aber zwei Geraden parallel zeichnet, müssen sie noch lange nicht parallel sein. Genauso schneiden sich beim Zeichnen die Geraden fast immer, es können aber entweder sich schneidende oder windschiefe Geraden sein
Abb. 11
Abb. 12
Abb. 13

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 9
Zur Bestimmung der Lagebeziehung gibt es drei mögliche (relative einfache) Wege, zwei sind schriftlich, einer mit dem GTR
1. 2. 3. Die Parameterdarstellungen gleichsetzen, in ein Gleichungssystem umwandeln und so
umformen, dass alle Variablen auf einer Seite sind und auf der anderen Seite jeweils eine einzelne Zahl steht. Dann kann man sie als Matrix in den Taschenrechner eingeben und mit rref(2ND|MATRIX|→|ALPHA|B) lösen lassen. An der Lösungsmatrix kann man direkt die Lage ablesen (X steht für jede beliebige Zahl, Y darf nicht null sein)
Identisch
[ ]( )1 2 1
0 0 0
0 0 0
Y Y X
rref A
=
Parallel
[ ]( )1 2 1
0 0 1
0 0 0
Y Y X
rref A
=
Schneiden sich
[ ]( )1
2
1 0
0 1
0 0 0
X
rref A X
=
Windschief
[ ]( )1 0 0
0 1 0
0 0 1
rref A
=
Richtungsvektoren Vielfache?Schnittpunkt(e)? Schnittpunkt(e)?
Identisch Parallel Schneiden sich Windschief
ja nein
ja nein ja nein
Abb. 14
Schnittpunkt(e)?
Identisch
Schneiden sich
Richtungsvektoren Vielfache?
Parallel
Windschief
Abb. 15
unendlich
viele
einer
nein
ja
nein

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 10
Vektoren und Ebenen Fügt man einer Parameterdarstellung noch einen zweiten Vektor mit Variable hinzu, der kein Vielfaches des ersten Vektors ist, wenn man also im Prinzip eine zweite Gerade auf die Gerade legt, erhält man eine Ebene. Eine Ebenengleichung hat also einen Stützvektor und zwei Richtungsvektoren, die auch Spannvektoren genannt werden
: ; ,E x a k b s c k s= + ⋅ + ⋅ ∈� � � �
ℝ Auch bei den Ebenen gibt es wieder unendlich viele verschiedene Darstellungen für jede einzelne Ebene
Lage von Ebenen Die Lage von Ebenen gibt man durch die Schnittpunkte 1 2 3, ,s s s mit den Achsen 1 2 3, ,x x x an.
Man bestimmt sie, indem man jeweils die beiden anderen Koordinaten mit 0 gleichsetzt und das entstehende Gleichungssystem löst. Dann setzt man die errechneten Werte in die Ebenengleichung ein. Erhält man als Schnittpunkt ( )0 0 0S , geht die Ebene durch den
Ursprung
Lagebeziehungen zwischen Gerade und Ebene Um die Lage einer Geraden zu einer Ebene zu bestimmen, reicht es aus, die Schnittpunktbestimmung durchzuführen, weil sich die unterschiedlichen Lagebeziehungen in der Anzahl der Schnittpunkte unterscheiden
– kein Schnittpunkt => Die Gerade liegt parallel zu der Ebene – ein Schnittpunkt => Die Gerade schneidet die Ebene – unendlich viele Schnittpunkte => Die Gerade liegt auf der Ebene
Durch Gleichsetzen und Lösen des entstehenden Gleichungssystems entweder schriftlich oder mit dem GTR bestimmt man die Schnittpunkte und damit die Lage
Lagebeziehungen zwischen zwei Ebenen Auch die verschiedenen Lagebeziehungen von zwei Ebenen unterscheiden sich in der Anzahl ihrer Schnittpunkte, es wird aber etwas komplizierter, weil sowohl identische als auch sich schneidende Geraden unendlich viele Schnittpunkte haben
– kein Schnittpunkt => parallel – unendlich viele Schnittpunkte, alle Variablen sind festgelegt oder von einer
bestimmten anderen Variablen abhängig, d.h. wenn man für eine der Variablen einen Wert einsetzt, sind alle Variablen eindeutig festgelegt. Man spricht auch von “unendlich vielen Lösungen mit einem freien Parameter“ => schneiden sich
– unendlich viele Schnittpunkte, aber es sind nicht alle Variablen direkt von derselben anderen Variable abhängig, d.h. wenn man für eine Variable einen Wert einsetzt, gibt es mindestens eine Variable, die noch nicht eindeutig ist => identisch
Man bestimmt die Lage der Ebenen zueinander also wieder durch Gleichsetzen, identische und sich schneidende Ebenen kann man unterscheiden, indem man in die Lösungsmatrix bzw. in das ermittelte Gleichungssystem irgendeinen Wert für eine der Variablen einsetzt. Wenn man dann für jede Variable einen festen Wert erhält, schneiden die Ebenen sich in einer Geraden, ansonsten sind sie identisch

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 11
Skalarprodukt Weil man prüfen wollte, ob zwei Vektoren senkrecht zueinander stehen, wurde eine Größe eingeführt, mit der man die Orthogonalität testen kann, das Skalarprodukt. Es ist aber kein echtes Produkt der Vektoren, sondern die Summe der Produkte der einzelnen Koordinaten
1 1 2 2 3 3a b a b a b a b• = + +� �
Die zwei Vektoren bilden einen rechten Winkel, wenn das Skalarprodukt 0 beträgt
a b⊥� �
, wenn 1 1 2 2 3 3 0a b a b a b a b• = + + =� �
0 0
0 , 3
3 0
a b
= =
� �
0 3
0 , 0
3 0
a b
= =
� �
0a b• =� �
0a b• =� �
0 2
0 , 2,5
3 1
a b
= =
� �
0 3
0 , 0,5
3 3
a b
− = = −
� �
3a b• =� �
9a b• = −� �
Wie man sehen kann, gibt es keinen Zusammenhang zwischen der echten und der gezeichneten Orthogonalität von Vektoren
a
b
Abb. 16
→→→→
→→→→ a
b
Abb. 17
→→→→
→→→→
a
b
Abb. 18
→→→→
→→→→
72,7°
a
b
Abb. 19
→→→→
→→→→
134,6°

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 12
Normalenvektor Neben dem Prüfen der Orthogonalität gibt es noch eine weitere Verwendung für das Skalarprodukt, den Normalenvektor. Der Normalenvektor ist ein Vektor, der senkrecht zu einer Ebene und damit auch zu jedem Richtungsvektor auf der Ebene steht. Deshalb kann er dafür verwendet werden, eine Ebene mit nur zwei Vektoren anzugeben, einem Stützvektor
und dem Normalenvektor n�
. Wie bei den Richtungsvektoren ist dabei die Länge des Normalenvektors unbedeutend. Es ist aber schwer, eine Ebene direkt über den Normalenvektor zu notieren, weil man ihn nicht einfach auf den Stützvektor aufaddieren kann. Deswegen schreibt man die Ebene mit der so genannten Koordinatengleichung auf 1 1 2 2 3 3n x n x n x d+ + =
Das Skalarprodukt der Vektoren n�
(Normalenvektor) und x�
(Ortsvektor eines Punktes auf der Ebene) ist also ein Wert, der für jeden Punkt X gleich ist. Dieser Wert d ist das Skalarprodukt aus dem Normalenvektor und dem Stützvektor. Um einen Normalenvektor zu bestimmen, wenn man nur eine Parameterdarstellung hat, muss man einfach das Kreuzprodukt (siehe unten) der beiden Richtungsvektoren berechnen
Abstand eines Punktes von einer Ebene Mit dem Normalenvektor kann man auch den Abstand eines Punktes von einer Ebene bestimmen. Dazu benötigt man eine Parameterdarstellung der Ebene und man muss sich eine Gerade mit einem Normalenvektor der Ebene als Richtungsvektor und dem Ortsvektor des Punktes als Stützvektor bilden. Durch Gleichsetzen erhält man den Schnittpunkt der Geraden mit der Ebene, der gleichzeitig Lotfußpunkt des Punktes auf der Ebene ist. Die Länge des Vektors zwischen diesem Punkt und dem Ausgangspunkt ist der Abstand des Punktes von der Ebene.
Kreuzprodukt/Vektorprodukt Auch das Kreuzprodukt ist kein echtes Produkt, sondern ist als Vektor, der senkrecht zu den zwei anderen Vektoren steht, definiert
3 2
1 3
2 3
3 1
1 2 2 1
a b
a b
a b
a
a
b
b
a b
a b
−−−
× =
� �
Man kann sich die relativ unübersichtliche Anordnung der Koordinaten im Vektorprodukt an einem Schema merken
a2
a3
a1
a2
b2
b3
b1
b2
+ -
1
2
3
Abb. 20

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 13
Länge eines Vektors Die Länge eines Vektors wird auch Betrag dieses Vektors genannt
2 2 21 2 3x x x x= + +
�
Mittelpunkt einer Strecke Den Mittelpunkt einer Strecke kann man aus den Ortsvektoren der beiden Endpunkte bestimmen
( )1
2m a b= +�� � �
Fläche eines Parallelogramms Man kann die Fläche eines Parallelogramms mit Vektoren berechnen, wenn man zwei aneinanderliegende Seiten als Vektor gegeben hat und den Winkel kennt, den diese beiden Vektoren einschließen
sinA a b α= ⋅ ⋅� �
Winkelberechnung
Für die Formeln verwende ich den Winkel ϕ , als einfache Vektoren u�
und v�
, n�
steht für einen Normalenvektor
Winkel zwischen zwei Vektoren
cosu v
u vϕ •=
⋅
� �
� �
Winkel zwischen zwei Geraden
cosu v
u vϕ
•=
⋅
� �
� �
Winkel zwischen Gerade und Ebene
sinn v
n vϕ
•=
⋅
� �
� �
Winkel zwischen zwei Ebenen
1 2
1 2
cosn n
n nϕ
•=
⋅
�� ���
�� ���
α
a
b
→→→→
→→→→
A
Abb. 21

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 14
Herleiten und Beweisen Wenn man etwas herleiten oder beweisen muss, kann man sich an diesen Schritten orientieren:
1. Überlegung Was will man zeigen oder entwickeln?
2. Überlegung Welche Vorraussetzungen hat man (Rechtwinkligkeit etc.)
3. Überlegung Welche mathematischen Definitionen/Sätze/Gesetze/Regeln könnte man verwenden
4. Notizen Erste Ansätze, den Beweis zu führen
5. Überlegung und Notizen Entwicklung des Beweises bzw. solange die Sätze/Definitionen umstellen und zusammenwürfeln, bis man auf die Lösung kommt
6. Reinschrift Formulieren der Zielsetzung
7. Überlegung und Notizen Korrekte Reihenfolge aufstellen und richtige Formulierung des Beweises finden
8. Reinschrift Verwendete Definitionen/Sätze/Gesetze/Regeln auflisten
9. Reinschrift Ausformulierung der Beweisführung/Herleitung
10. Reinschrift Bei Herleitungen noch einmal die entwickelte Formel aufschreiben, bei Beweisen das Ergebnis des Beweises notieren (Damit ist bewiesen, dass ...)
Bei den folgenden Herleitungen werde ich aber nur die Schritte 6 und 8 bis 10 beachten, weil nur diese Reinschrift später auch im Abitur gewertet wird

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 15
Herleitung der Länge eines Vektors
– Zielsetzung
Eine Formel zur Berechnung der Länge eines Vektors finden
– Verwendete Sätze und Definitionen
Satz des Pythagoras
– Beweisführung
Den Vektor 1
2
3
x
x x
x
=
�
, dessen Länge man bestimmen will, kann man in die
Teilvektoren 1
1 0
0
x
x
=
��
, 2 2
0
0
x x
=
���
und 3
3
0
0x
x
=
���
aufteilen, deren Länge man sich
leicht überlegen kann: 1 1 2 2 3 3, ,x x x x x x= = =�� ��� ���
Im ersten Schritt wird aus den Vektoren 1x��
und 2x���
ein Vektor 12x���
gebildet
Nach dem Satz des Pythagoras ergibt sich daraus wegen des rechten Winkels:
2 2 2
12 1 2
22 2
12 1 2
x x x
x x x
= +
= +
��� �� ���
���
Hängt man an diesen Vektor 12x���
noch den
Vektor 3x���
, erhält man den Vektor x�
, von
dem man die Länge bestimmen will. Hier kann man wieder den Satz des Pythagoras anwenden:
2 2 2
12 3
2 22
12 3
22 2 21 2 3
2 2 21 2 3
x x x
x x x
x x x x
x x x x
= +
= +
= + +
= + +
� ��� ���
� ���
�
�
– Ergebnis der Herleitung
Die Formel zur Berechnung der Länge eines Vektors lautet:
2 2 21 2 3x x x x= + +
�
x1
x2
→→→→
→→→→
x12→→→→
x→→→→
x3→→→→

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 16
Herleitung des Skalarprodukts
– Zielsetzung Eine Bedingung für die Orthogonalität von Vektoren finden, die sich leicht überprüfen lässt
– Verwendete Sätze und Definitionen Satz des Pythagoras Länge eines Vektors
– Beweisführung
Wenn zwei Vektoren a�
und b�
rechtwinklig zueinander sind, gilt in dem Dreieck mit dem
Verbindungsvektor der beiden Endpunkte (b a−� �
) der Satz des Pythagoras:
2 2 2b a a b− = +� � � �
Setzt man jetzt die Formel zur Berechnung der Länge eines Vektors ein, erhält man:
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
2 2 22 2 2 2 2 2 2 2 2
1 1 2 2 3 3 1 2 3 1 2 3
2 2 2 2 2 2 2 2 21 1 2 2 3 3 1 2 3 1 2 3
2 2 2 2 2 2 2 2 2 2 2 21 1 1 1 2 2 2 2 3 3 3 3 1 2 3 1 2 32 2 2
b a b a b a a a a b b b
b a b a b a a a a b b b
b a b a b a b a b a b a a a a b b b
− + − + − = + + + + +
− + − + − = + + + + +
− + + − + + − + = + + + + +
Streicht man dann alle Faktoren, die auf beiden Seiten der Gleichung vorkommen, ergibt das:
1 1 2 2 3 3
1 1 2 2 3 3
2 2 2 0
0
a b a b a b
a b a b a b
− − − =+ + =
– Ergebnis der Herleitung
Zwei Vektoren a�
und b�
sind rechtwinklig, wenn 1 1 2 2 3 3 0a b a b a b+ + = gilt
Dieser Term 1 1 2 2 3 3a b a b a b+ + wurde als Skalarprodukt a b•� �
der Vektoren definiert
a
b b - a → → → →
→ → → →
→ → → → → → → →

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 17
Herleitung des Vektorprodukts
– Zielsetzung Einen Vektor bestimmen, der auf zwei gegebenen Vektoren senkrecht steht
– Verwendete Sätze und Definitionen Skalarprodukt
– Beweisführung
Für einen Vektor c�
, der zu zwei gegebenen Vektoren a�
und b�
orthogonal ist, müssen diese beiden Gleichungen gelten:
1 1 2 2 3 3
1 1 2 2 3 3
0
0
a c a c a c
b c b c b c
+ + =+ + =
Jetzt kann man zweimal die Gleichungen vervielfachen und zusammenrechnen, einmal um 1c loszuwerden, das zweite Mal um 2c loszuwerden
( )
( ) ( )( ) ( )( ) ( )
11 1 2 2 3 3
11 1 2 2 3 3
1 1 1 2 1 2 3 1 3
1 1 1 1 2 2 1 3 3
2 1 2 1 2 2 3 1 3 1 3 3
2 1 1 2 2 3 1 1 3 3
2 1 1 2 2 3 1 1 3 3
1 2 2 1 2 3 1 1 3 3
3 1 1 32
0
0
0
0
0 0
0
ba c a c a c
ab c b c b c
a b c a b c a b c
a b c a b c a b c
a b c a b c a b c a b c
a b a b c a b a b c
a b a b c a b a b c
a b a b c a b a b c
a b a bc
a
⋅+ + =⋅ −+ + =
+ + =− − − =+ − + − =
− + − =
− = − −
− = −−= 3
1 2 2 1
cb a b−
( )
( ) ( )( ) ( )( ) ( )
1 1 2 2 3 3 2
1 1 2 2 3 3 2
1 2 1 2 2 2 3 2 3
2 1 1 2 2 2 2 3 3
2 1 1 1 2 1 2 3 3 3 2 3
2 1 1 2 1 2 3 3 2 3
2 1 1 2 1 2 3 3 2 3
1 2 2 1 1 2 3 3 2 3
2 3 3 21
0
0
0
0
0 0
0
a c a c a c b
b c b c b c a
a b c a b c a b c
a b c a b c a b c
a b c a b c a b c a b c
a b a b c a b a b c
a b a b c a b a b c
a b a b c a b a b c
a b a bc
a
+ + = ⋅ −+ + = ⋅
− − − =+ + =
− + + − =− + − =
− = − −
− = −−= 3
1 2 2 1
cb a b−
Kombiniert man diese Gleichungen wieder, erhält man:
3c kann man jetzt frei wählen, aber um die Koordinaten des
Vektors möglichst einfach zu halten, wählt man 3 1 2 2 1c a b a b= −
und erhält so:
1 2 3 3 2 2 3 3 2
2 3 1 1 3 3 1 1 3
3 1 2 2 1 1 2 2 1
c a b a b a b a b
c a b a b c a b a b
c a b a b a b a b
= − − = − ⇒ = − = − −
�
– Ergebnis der Herleitung
Der Vektor 2 3 3 2
3 1 1 3
1 2 2 1
a b a b
c a b a b
a b a b
− = − −
�
steht senkrecht auf a�
und b�
und wird als Kreuzprodukt
a b� �
der beiden Vektoren bezeichnet
2 3 3 21 3
1 2 2 1
3 1 1 32 3
1 2 2 1
a b a bc c
a b a b
a b a bc c
a b a b
−=−−=−

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 18
Herleitung der Koordinatengleichung
– Zielsetzung Eine einfache Gleichung zur Angabe einer Ebene entwickeln
– Verwendete Sätze und Definitionen Skalarprodukt Normalenvektor
– Beweisführung
Man hat eine Ebene mit dem Stützvektor a�
und dem Normalenvektor n�
Weil ein Normalenvektor zu jedem Vektor, der auf der Ebene liegt, senkrecht steht, muss er auch zu dem Vektor AX
����
orthogonal sein. Damit gilt:
( )0
0
n AX
n x a
n x n a
• =
• − =
• = •
� ����
� � �
� � � �
Weil die Vektoren n�
und a�
sich nicht ändern, bleibt der Wert n a•� �
immer gleich. Deswegen kann man diesen Term durch eine Variable ersetzen:
1 1 2 2 3 3
n x d
n x n x n x d
• =+ + =
� �
– Ergebnis der Herleitung
Eine Ebene kann man durch
1 1 2 2 3 3n x n x n x d+ + =
eindeutig angeben. Diese Form der Darstellung wird Koordinatengleichung genannt
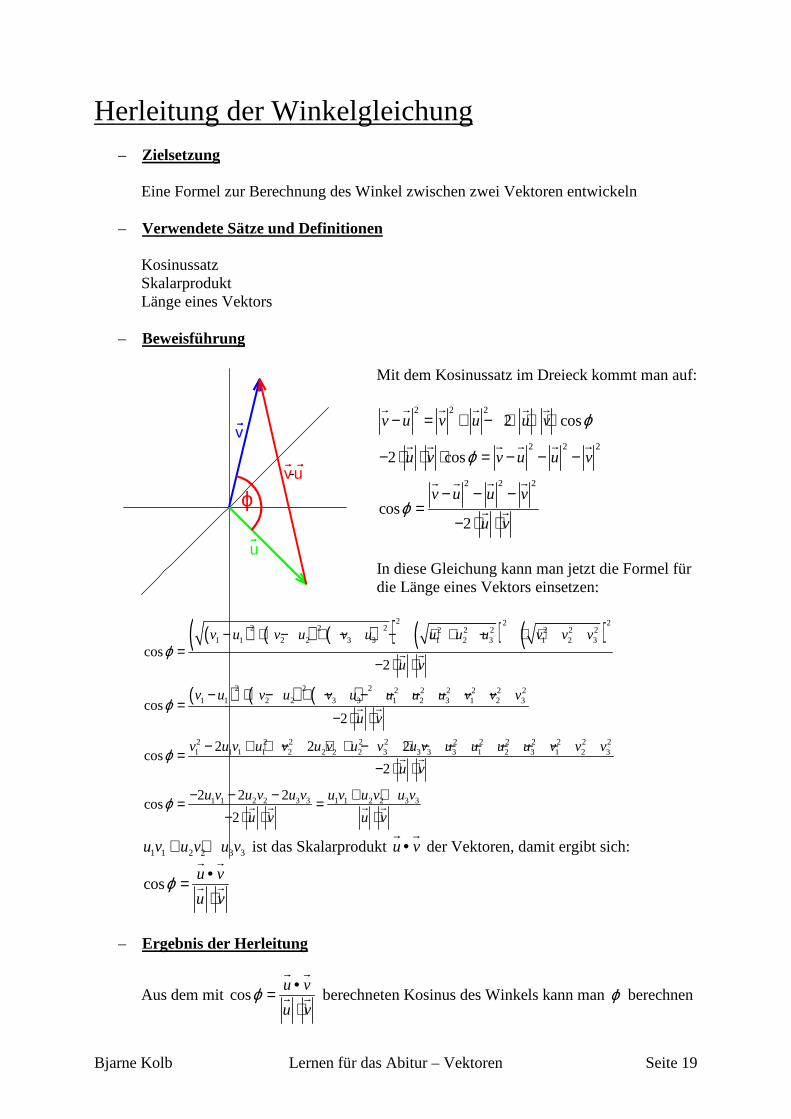
Bjarne Kolb Lernen für das Abitur – Vektoren Seite 19
Herleitung der Winkelgleichung
– Zielsetzung Eine Formel zur Berechnung des Winkel zwischen zwei Vektoren entwickeln
– Verwendete Sätze und Definitionen Kosinussatz Skalarprodukt Länge eines Vektors
– Beweisführung
Mit dem Kosinussatz im Dreieck kommt man auf:
2 2 2
2 2 2
2 2 2
2 cos
2 cos
cos2
v u v u u v
u v v u u v
v u u v
u v
ϕ
ϕ
ϕ
− = + − ⋅ ⋅ ⋅
− ⋅ ⋅ ⋅ = − − −
− − −=
− ⋅ ⋅
� � � � � �
� � � � � �
� � � �
� �
In diese Gleichung kann man jetzt die Formel für die Länge eines Vektors einsetzen:
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
2 2 22 2 2 2 2 2 2 2 2
1 1 2 2 3 3 1 2 3 1 2 3
2 2 2 2 2 2 2 2 21 1 2 2 3 3 1 2 3 1 2 3
2 2 2 2 2 2 2 2 2 2 2 21 1 1 1 2 2 2 2 3 3 3 3 1 2 3 1 2 3
cos2
cos2
2 2 2cos
2
cos
v u v u v u u u u v v v
u v
v u v u v u u u u v v v
u v
v u v u v u v u v u v u u u u v v v
u v
ϕ
ϕ
ϕ
ϕ
− + − + − − + + − + +=
− ⋅ ⋅
− + − + − − − − − − −=
− ⋅ ⋅
− + + − + + − + − − − − − −=− ⋅ ⋅
=
� �
� �
� �
1 1 2 2 3 3 1 1 2 2 3 32 2 2
2
u v u v u v u v u v u v
u v u v
− − − + +=− ⋅ ⋅ ⋅� � � �
1 1 2 2 3 3u v u v u v+ + ist das Skalarprodukt u v•� �
der Vektoren, damit ergibt sich:
cosu v
u vϕ •=
⋅
� �
� �
– Ergebnis der Herleitung
Aus dem mit cosu v
u vϕ •=
⋅
� �
� � berechneten Kosinus des Winkels kann man ϕ berechnen
ϕ
u
v
v - u →→→→ → → → →
→ → → →
→ → → →

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 20
Lage von Geraden Bestimmen Sie die Spurpunkte der folgenden Geraden:
3 1
: 2 1 ,
1 2
g x k k
− = + ∈
�ℝ
1 1
: 4 1 ,
8 2
h x k k
= + ∈
�ℝ
6 3
: 4 2 ,
2 1
i x k k
− = − + ∈ −
�ℝ
Spurpunkte von g Spurpunkte von h Spurpunkte von i
12S bestimmen, indem man 3x mit 0 gleichsetzt
( )
3
12
1 2 0
2 1
0,5
3 1 3,5
2 0,5 1 1,5
1 2 0
3,5 1,5 0
x k
k
k
x
S
= + == −
= −−
= − =
�
( )
3
12
8 2 0
2 8
4
1 1 3
4 4 1 0
8 2 0
3 0 0
x k
k
k
x
S
= + == −
= −−
= − =
−
�
( )
3
12
2 0
2
6 3 0
4 2 2 0
2 1 0
0 0 0
x k
k
x
S
= − ==
− = − + = −
�
2x mit 0 gleichsetzen Man muss nur noch 23S
bestimmen
Es gibt nur einen Spurpunkt
( )0 0 0S
( )
2
13
2 0
2
3 1 5
2 2 1 0
1 2 3
5 0 3
x k
k
x
S
= + == −
− = − = −
−
�
1x mit 0 gleichsetzen
( )
1
23
1 0
1
1 1 0
4 1 3
8 2 6
0 3 6
x k
k
x
S
= + == −
= − =
�
1x mit 0 gleichsetzen
( )
1
23
3 0
3
3 1 0
2 3 1 5
1 2 7
0 5 7
x k
k
x
S
= − ==
− = + =
�
( )( )( )
12
13
23
3,5 1,5 0
5 0 3
0 5 7
S
S
S
−
( )( )
1
23
3 0 0
0 3 6
S
S
−
( )0 0 0S

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 21
Lagebeziehungen zwischen Geraden – 1.Weg Bestimmen Sie die folgenden Lagebeziehungen:
3 1
: 2 1 ,
1 2
a x k k
− = + ∈
�ℝ
6 3
: 1 3 ,
5 6
b x r r
= − + − ∈ − −
�ℝ
2 1
: 2 1 ,
2 2
c x s s
= + − ∈ −
�ℝ
5 2,25
: 4 1 ,
2 1
d x t t
− = − + ∈ −
�ℝ
(1) a zu b (2) a zu c (3) a zu d (4) c zu d
(1) a zu b (2) a zu c Richtungsvektoren Vielfache?
1 3 1 3
1 3 1 3
2 6 2 6
1 3 1/ 31
1 3 1/ 33
2 6 1/ 3
r
r r
r
r r
r r r
r r
− − = − ⇔ = − − −
− = = −= − ⇔ = − ⇔ = −= − = −
Die Vektoren sind Vielfache
1 1 1
1 1 1
2 2 2 2
1 1
1 1 1
2 2 1
s
s s
s
s s
s s s
s s
− − = − ⇔ = − − −
− = = −= − ⇔ = − ⇔ = −= − = −
Die Vektoren sind Vielfache Schnittpunktbestimmung durch Gleichsetzen und Umformen
3 1 6 3
2 1 1 3
1 2 5 6
1 3 6 3 3
1 3 1 2 3
2 6 5 1 6
3 3 3 3
3 3 3 3
2 6 6 3 3
3 3
0 0 0
0 0
k r
k r
k r k r
k r k r
k r k r
k r
− + = − + − − −
− − − = − − = − − − −
− − = − − =+ = − ⇔ + = −+ = − + = −
− − =+ =+ = 0
3 3k r− − =
Es gibt unendlich viele Schnittpunkte
3 1 2 1
2 1 2 1
1 2 2 2
1 1 2 3 1
1 1 2 2 0
2 2 2 1 1
1 1
0 0
2 2 1 0,5
1
0 0 1
0 0 0,5
k s
k s
k s k s
k s k s
k s k s
k s
− + = + − −
− − − − = − = −
− − = − − − = −+ = ⇔ + =+ = + =
− − = −+ = −
+ = −
Es gibt keinen Schnittpunkt
Richtungsvektoren Vielfache + Schnittpunkte => identisch
Richtungsvektoren Vielfache + Schnittpunkte => parallel

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 22
(3) a zu d (4) c zu d Richtungsvektoren Vielfache?
1 2,25 1 2,25
1 1 1
2 1 2
1 2,25 4 / 9
1 1
2 2
t
t t
t
t t
t t
t t
− − = ⇔ = − −
− = = −= ⇔ == − = −
Die Vektoren sind keine Vielfachen
1 2,25 1 2,25
1 1 1
2 1 2
1 2,25 4 / 9
1 1
2 2
t
t t
t
t t
t t
t t
− = ⇔ − = − − − −
= =− = ⇔ = −
− = − =
Die Vektoren sind keine Vielfachen Schnittpunktbestimmung durch Gleichsetzen und Umformen
3 1 5 2,25
2 1 4 1
1 2 2 1
1 2,25 5 3 8
1 1 4 2 6
2 1 2 1 1
2,25 8 2,25 8
6 6
2 1 0,5 0,5
2,
k t
k t
k t k t
k t k t
k t k t
k
− − + = − + −
− − − − = − − = − −
− − = − − − = −− = − ⇔ − = −
+ = + =
− − 25 8 2,25 8
0 3,25 14 56 /13
0 1,75 7,5 30 / 7
t k t
t t
t t
= − − − = −− = − ⇔ =− = − =
Es gibt keinen Schnittpunkt
2 1 5 2,25
2 1 4 1
2 2 2 1
1 2,25 5 2 7
1 1 4 2 6
2 1 2 2 0
2,25 7 2,25 7
6 6
2 0 0,5 0
2
s t
s t
s t s t
s t s t
s t s t
s
− + − = − + − −
− − − − = − − = − − −
− = − − = −− − = − ⇔ − − = −− + = − + =
− , 25 7 2,25 7
0 3,25 13 4
0 1,75 7 4
2,25 4 7 2
4 4
2 1 4
2 2 1 0
2 2 2
t s t
t t
t t
s s
t t
x
= − = −− = − ⇔ =− = − =
= ⋅ − =⇔
= =
= + − = − −
�
Es gibt einen Schnittpunkt ( )4 0 2S −
Richtungsvektoren keine Vielfachen + kein Schnittpunkt => windschief
Richtungsvektoren keine Vielfachen + ein Schnittpunkt => schneiden sich

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 23
Lagebeziehungen zwischen Geraden – 2.Weg Jetzt werde ich diese Lagebeziehungen noch einmal mit dem anderen schriftlichen Weg bestimmen
(1) a zu b (2) a zu c Schnittpunktbestimmung durch Gleichsetzen und Umformen
3 1 6 3
2 1 1 3
1 2 5 6
1 3 6 3 3
1 3 1 2 3
2 6 5 1 6
3 3 3 3
3 3 3 3
2 6 6 3 3
3 3
0 0 0
0 0
k r
k r
k r k r
k r k r
k r k r
k r
− + = − + − − −
− − − = − − = − − − −
− − = − − =+ = − ⇔ + = −+ = − + = −
− − =+ =+ = 0
3 3k r− − =
Es gibt unendlich viele Schnittpunkte
3 1 2 1
2 1 2 1
1 2 2 2
1 1 2 3 1
1 1 2 2 0
2 2 2 1 1
1 1
0 0
2 2 1 0,5
1
0 0 1
0 0 0,5
k s
k s
k s k s
k s k s
k s k s
k s
− + = + − −
− − − − = − = −
− − = − − − = −+ = ⇔ + =+ = + =
− − = −+ = −
+ = −
Es gibt keinen Schnittpunkt
Richtungsvektoren Vielfache? Diesen Schritt braucht man nicht 1 1 1
1 1 1
2 2 2 2
1 1
1 1 1
2 2 1
s
s s
s
s s
s s s
s s
− − = − ⇔ = − − −
− = = −= − ⇔ = − ⇔ = −= − = −
Die Vektoren sind Vielfache unendlich viele Schnittpunkte => identisch
kein Schnittpunkt + Richtungsvektoren Vielfache => parallel

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 24
(3) a zu d (4) c zu d Schnittpunktbestimmung durch Gleichsetzen und Umformen
3 1 5 2,25
2 1 4 1
1 2 2 1
1 2,25 5 3 8
1 1 4 2 6
2 1 2 1 1
2,25 8 2,25 8
6 6
2 1 0,5 0,5
2,
k t
k t
k t k t
k t k t
k t k t
k
− − + = − + −
− − − − = − − = − −
− − = − − − = −− = − ⇔ − = −
+ = + =
− − 25 8 2,25 8
0 3,25 14 56 /13
0 1,75 7,5 30 / 7
t k t
t t
t t
= − − − = −− = − ⇔ =− = − =
Es gibt keinen Schnittpunkt
2 1 5 2,25
2 1 4 1
2 2 2 1
1 2,25 5 2 7
1 1 4 2 6
2 1 2 2 0
2,25 7 2,25 7
6 6
2 0 0,5 0
2
s t
s t
s t s t
s t s t
s t s t
s
− + − = − + − −
− − − − = − − = − − −
− = − − = −− − = − ⇔ − − = −− + = − + =
− , 25 7 2,25 7
0 3,25 13 4
0 1,75 7 4
2,25 4 7 2
4 4
2 1 4
2 2 1 0
2 2 2
t s t
t t
t t
s s
t t
x
= − = −− = − ⇔ =− = − =
= ⋅ − =⇔
= =
= + − = − −
�
Es gibt einen Schnittpunkt ( )4 0 2S −
Richtungsvektoren Vielfache? 1 2,25 1 2,25
1 1 1
2 1 2
1 2,25 4 / 9
1 1
2 2
t
t t
t
t t
t t
t t
− − = ⇔ = − −
− = = −= ⇔ == − = −
Die Vektoren sind keine Vielfachen
Diesen Schritt braucht man nicht
kein Schnittpunkt + Richtungsvektoren keine Vielfachen => windschief
ein Schnittpunkt => schneiden sich

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 25
Lagebeziehungen zwischen Geraden – 3.Weg Und dann noch einmal mit dem GTR
(1) a zu b (2) a zu c 3 1 6 3
2 1 1 3
1 2 5 6
1 3 6 3 3
1 3 1 2 3
2 6 5 1 6
3 3
3 3
2 6 6
1 3 3
1 3 3
2 6 6
k r
k r
k r
k r
k r
rref
− + = − + − − −
− − − = − − = − − − −
− − =+ = −+ = −
− − − = −
1 3 3
0 0 0
0 0 0
−
Es gibt unendlich viele Schnittpunkte => identisch
3 1 2 1
2 1 2 1
1 2 2 2
1 1 2 3 1
1 1 2 2 0
2 2 2 1 1
1
0
2 2 1
1 1 1 1 1 0
1 1 0 0 0 1
2 2 1 0 0 0
k s
k s
k s
k s
k s
rref
− + = + − −
− − − − = − = −
− − = −+ =+ =
− − − =
Es gibt keinen Schnittpunkt, aber wenn man eine der Geraden so verschieben würde, dass die zweite Gleichung stimmt, gäbe es unendlich viele Schnittpunkte => parallel
(3) a zu d (4) c zu d 3 1 5 2,25
2 1 4 1
1 2 2 1
1 2,25 5 3 8
1 1 4 2 6
2 1 2 1 1
2,25 8
6
2 1
1 2,25 8
1 1 6
2 1 1
k t
k t
k t
k t
k t
rref
− − + = − + −
− − − − = − − = − −
− − = −− = −
+ =
− − − − −
1 0 0
0 1 0
0 0 1
=
Es gibt keinen Schnittpunkt, aber wenn man eine der Geraden so verschieben würde, dass die dritte Gleichung stimmt, gäbe es genau einen Schnittpunkt => windschief
2 1 5 2,25
2 1 4 1
2 2 2 1
1 2,25 5 2 7
1 1 4 2 6
2 1 2 2 0
2,25 7
6
2 0
1 2,25 7
1 1 6
2 1 0
s t
s t
s t
s t
s t
rref
− + − = − + − −
− − − − = − − = − − −
− = −− − = −− + =
− − − − −−
1 0 2
0 1 4
0 0 0
=
Es gibt einen Schnittpunkt mit s=2 und t=4 => schneiden sich

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 26
Lage von Ebenen Bestimmen sie bei den folgenden Ebenen die Schnittpunkte mit den Koordinatenachsen
1
5 1 5
: 3 1 0 ; ,
2 1 1
E x k s k s
− − = − + + ∈ − −
�ℝ 2
6 3 4
: 1 7 5 ; ,
5 4 1
E x k s k s
− − − = + + ∈ − −
�ℝ
Schnittpunkte von 1E Schnittpunkte von 2E
1S bestimmen, indem man 2x und 3x mit 0 gleichsetzt
( )
2
3
1
3 0 0 3 0
2 0 2
3 3 3
2 2 3 1
5 1 5 7
3 3 1 0 0
2 1 1 0
7 0 0
x k s k
x k s s k
k k k
s k s s
x
S
= − + + = − =⇔
= − − = = −
= = =⇔ ⇔
= − = − = −
− − = − + − = − −
�
( )
( )
2
3
1
1 7 5 0 7 5 1
5 4 0 5 4
7 25 20 17 5 5 4 1
5 45 4
13 26 2 2 2
5 4 5 4 5 4 2 3
6 3 4 0
1 2 7 3 5 0
5 4 1 0
0 0 0
x k s k s
x k s s k
k kk k
s ks k
k k k k
s k s k s s
x
S
= + + = = − −⇔
= − − = = −
= − + −= − − −⇔
= −= −
− = − = = =⇔ ⇔ ⇔
= − = − = − ⋅ = −
− − − = + − = − −
�
Es gibt nur einen Schnittpunkt ( )0 0 0S
1x und 3x mit 0 gleichsetzen
( )
( )
1
3
2
5 5 0 5 5
2 0 2
5 10 5 4 55 5 2
2 22
1,25 1,25 1,25
2 2 1,25 0,75
5 1 5 0
3 1,25 1 0,75 0 1,75
2 1 1 0
0 1,75 0
x k s k s
x k s s k
k k kk k
s k s ks k
k k k
s k s s
x
S
= − − = = −⇔
= − − = = −
= − + − = −= − −⇔ ⇔
= − = −= −
= = =⇔ ⇔
= − = − =
− − = − + + = − − −
−
�
1x und 2x mit 0 gleichsetzen
( )
1
2
3
5 5 0 5 5
3 0 0 3
5 5 3 5 2 0,4
3 3 3
5 1 5 0
3 3 1 0,4 0 0
2 1 1 1,4
0 0 1,4
x k s s k
x k s k
s s s
k k k
x
S
= − − = = −⇔
= − + + = =
= − = =⇔ ⇔
= = =
− − = − + + = − − −
−
�
( )( )( )
1
2
3
7 0 0
0 1,75 0
0 0 1,4
S
S
S
−
−
( )0 0 0S

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 27
Lage einer Gerade zu einer Ebene – 1.Weg Bestimmen Sie die Lage der folgenden Geraden zu der Ebene E
5 1 3
: 3 1 2 ; ,
2 1 1
E x k s k s
− − = − + + ∈ − −
�ℝ
8 1
: 1 4 ,
2 4
a x r r
− = + ∈ −
�ℝ
10 9
: 6 7 ,
3 5
b x r r
= − + − ∈
�ℝ
4 6
: 0 5 ,
2 4
c x r r
− = + ∈ − −
�ℝ
– Schnittpunktbestimmung durch Gleichsetzen und Umformen a zu E
5 1 3 8 1 1 3 1 8 5 13
3 1 2 1 4 1 2 4 1 3 4
2 1 1 2 4 1 1 4 2 2 0
3 13
2 4 4
k s r k s r
k s r
k s r
k s
− − − − − − − − + + = + ⇔ + − = − − = − − − − − −
− − − = −+ − =
− − +
3 13 3 13 3 13
2 4 4 0 5 9 5 9
4 0 4 0 0 2 5 13 2,5 6,5
3 13 3 13 3 1 13 3 12 3 4 12
5 9 5 9 5 1 9 4 4
0 2,5 2,5 1 1 1 1
0
k s r k s r k s r
k s r s r s r
r k s r s r s r
k s r k s r k s k s k
s r s r s s s
r r r r r
k
− − − = − − − − = − = − − +⇔ + − = ⇔ − − = − ⇔ − − = −
= + − = − − = − + =
= − − + = − − + = − − + = − + = − ⋅ +− − = − ⇔ = − + ⇔ = − ⋅ + ⇔ = ⇔ =− = − = = = =
= 8 1 7
4 1 4 5
1 2 4 2
s x
r
− − = ⇒ = + = = − −
�
Es gibt einen Schnittpunkt ( )7 5 2S − −
ein Schnittpunkt => Die Gerade schneidet die Ebene

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 28
b zu E
5 1 3 10 9 1 3 9 10 5 5
3 1 2 6 7 1 2 7 6 3 3
2 1 1 3 5 1 1 5 3 2 1
3 9 5
2 7 3
k s r k s r
k s r
k s r
k s
− − − − − + + = − + − ⇔ + − − = − − − = − − − − −
− − − =+ + = −
− −
( )
3 9 5 3 9 5 3 9 5
2 7 3 0 2 2 2 2
5 1 5 1 0 2 4 4 2 2
3 9 53 9 5 6 6 9 53 2 2 9 5
2 22 2 2 22 2
0 0 0
3 1
2 2
k s r k s r k s r
k s r s r s r
r k s r s r s r
k s rk s r k r rk r r
s rs r s rs r
k r
s r
− − − = − − − = = − − −⇔ + + = − ⇔ − − = ⇔ − − =
− = + + = − − − = + = −
= − − −= − − − = + − −= − − − − −
− − = ⇔ ⇔ ⇔= − − = − −= − −
+ =
= − += − −
Es gibt unendlich viele Schnittpunkte unendlich viele Schnittpunkt => Die Gerade liegt auf der Ebene c zu E
5 1 3 4 6 1 3 6 4 5 1
3 1 2 0 5 1 2 5 0 3 3
2 1 1 2 4 1 1 4 2 2 4
3 6 1
2 5 3
k s r k s r
k s r
k s r
k
− − − − − − − − + + = + ⇔ + − = − − = − − − − − − − − −
− − + = −+ − =
− −
3 6 1 3 6 1 3 6 1
2 5 3 0 2 2
4 4 4 4 0 2 2 3 1,5
3 6 1
2
0 0 0,5
k s r k s r k s r
k s r s r s r
s r k s r s r s r
k s r
s r
− − + = − − − + = − = − + +⇔ + − = ⇔ − + = ⇔ − + =
+ = − + − = − + = − = −
= − + +− + =+ =
Es gibt keinen Schnittpunkt kein Schnittpunkt => Die Gerade liegt parallel zu der Ebene
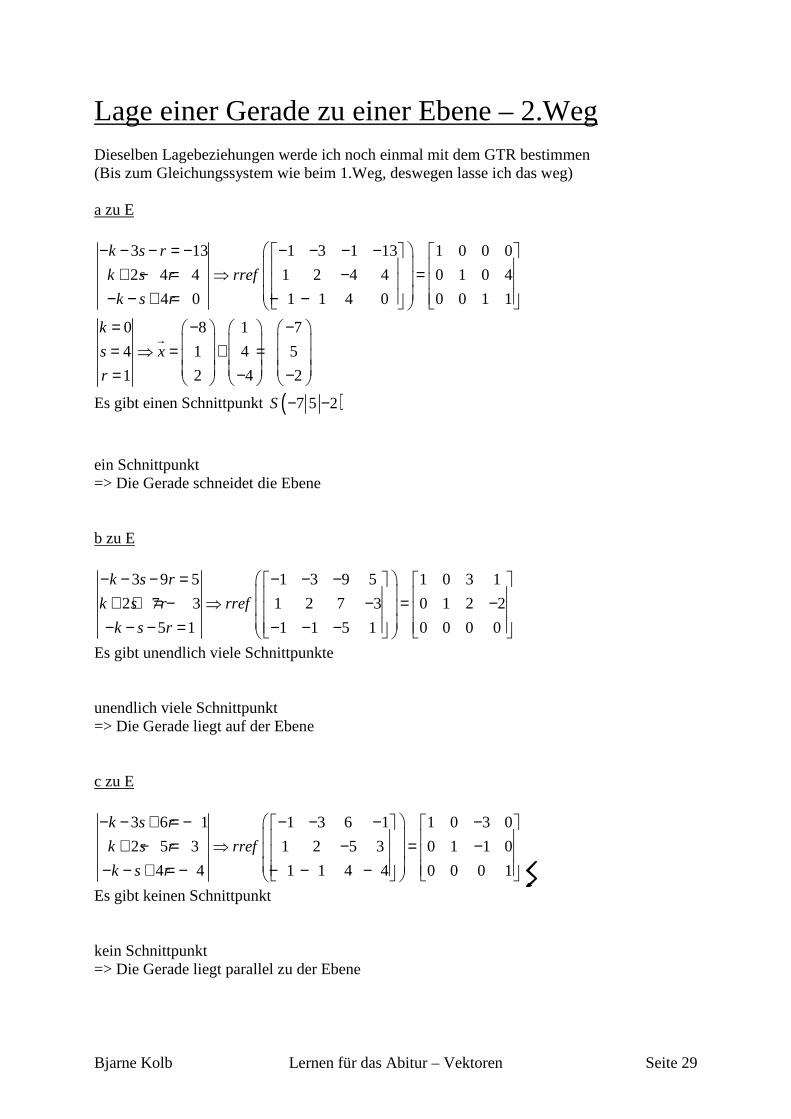
Bjarne Kolb Lernen für das Abitur – Vektoren Seite 29
Lage einer Gerade zu einer Ebene – 2.Weg Dieselben Lagebeziehungen werde ich noch einmal mit dem GTR bestimmen (Bis zum Gleichungssystem wie beim 1.Weg, deswegen lasse ich das weg) a zu E
3 13 1 3 1 13 1 0 0 0
2 4 4 1 2 4 4 0 1 0 4
4 0 1 1 4 0 0 0 1 1
0 8 1 7
4 1 4 5
1 2 4 2
k s r
k s r rref
k s r
k
s x
r
− − − = − − − − − + − = ⇒ − = − − + = − −
= − − = ⇒ = + = = − −
�
Es gibt einen Schnittpunkt ( )7 5 2S − −
ein Schnittpunkt => Die Gerade schneidet die Ebene b zu E
3 9 5 1 3 9 5 1 0 3 1
2 7 3 1 2 7 3 0 1 2 2
5 1 1 1 5 1 0 0 0 0
k s r
k s r rref
k s r
− − − = − − − + + = − ⇒ − = − − − − = − − −
Es gibt unendlich viele Schnittpunkte unendlich viele Schnittpunkt => Die Gerade liegt auf der Ebene c zu E
3 6 1 1 3 6 1 1 0 3 0
2 5 3 1 2 5 3 0 1 1 0
4 4 1 1 4 4 0 0 0 1
k s r
k s r rref
k s r
− − + = − − − − − + − = ⇒ − = − − − + = − − − −
Es gibt keinen Schnittpunkt kein Schnittpunkt => Die Gerade liegt parallel zu der Ebene

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 30
Lagebeziehungen zwischen zwei Ebenen Bestimmen Sie die Lage der folgenden Ebenen zu der Ebene E
5 1 3
: 3 1 2 ; ,
2 1 1
E x k s k s
− − = − + + ∈ − −
�ℝ 2
7 2 1
: 3,5 1 1 ; ,
1 0 3
E x a b a b
− = − + + ∈ −
�ℝ
3
6 1 7
: 1 2 2 ; ,
2 3 3
E x c d c d
= − + − + − ∈ −
�ℝ 4
2 8 3
: 2 5 3 ; ,
2 3 4
E x e f e f
= + − + − ∈
�ℝ
Den schriftlichen Weg werde ich mir hier sparen, weil er sehr langwierig ist E zu E2
5 1 3 7 2 1
3 1 2 3,5 1 1
2 1 1 1 0 3
1 3 2 1 7 5 2
1 2 1 1 3,5 3 0,5
1 1 0 3 1 2
k s a b
k s a b
− − − − + + = − + + − − −
− − − + − − = − − − = − − − −
3 2 2
2 0,5
1 0 3 1
1 3 2 1 2 1 0 1 5 2,5 5 0
1 2 1 1 0,5 0 1 1 2 1,5 2 1,5
1 1 0 3 1 0 0 0 0 0 0 0
k s a b
k s a b
k s b
k a b
rref s a b
− − + − = ⇔ + − − = − − − − + + = −
− − − − + − = ⇒ − − − = − − ⇒ − + = − − − − =
Es gibt unendlich viele Schnittpunkte
– Ein oder zwei freie Variablen? 0 für b einsetzen 0 2,5 2,5
0 1,5 1,5
k a k a
s a s a
+ + = = −⇔
− + = − = −
Es gibt zwei freie Variablen unendlich viele Schnittpunke + zwei freie Parameter => identisch

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 31
E zu E3
5 1 3 6 1 7
3 1 2 1 2 2
2 1 1 2 3 3
1 3 1 7 6 5 1
1 2 2 2 1 3 2
1 1 3 3 2 2 0
k s c d
k s c d
− − − + + = − + − + − − − −
− − + − − − − = − − − = − − −
3 7 1
2 2 2 2
3 3 0
1 3 1 7 1 1 0 4 8 0 4 8 0
1 2 2 2 2 0 1 1 5 0 5 0
1 1 3 3 0 0 0 0 0 1 0 1
k s c d
k s c d
k s c d
k c d
rref s c d
− − − − = ⇔ + + + =
− − − + =
− − − − − + − = ⇒ = − ⇒ − + = − − − =
Es gibt keinen Schnittpunkt kein Schnittpunkt => parallel E zu E4
5 1 3 2 8 3
3 1 2 2 5 3
2 1 1 2 3 4
1 3 8 3 2 5 3
1 2 5 3 2 3 5
1 1 3 4 2 2 0
k s e f
k s e f
− − − + + = + − + − − −
− − − + − − − − = − − = − −
3 8 3 3
2 5 3 5
3 4 0
1 3 8 3 3 1 0 0 4 2 4 2
1 2 5 3 5 0 1 0 3 19 3 19
1 1 3 4 0 0 0 1 1 7 7
k s e f
k s e f
k s e f
k f
rref s f
e f
− − − − = − ⇔ + + + = − − − − =
− − − − − + = ⇒ = − ⇒ − = − − − − − + = −
Es gibt unendlich viele Schnittpunkte
– Ein oder zwei freie Variablen? 0 für f einsetzen
0 2 2
0 19 19
0 7 7
k k
s s
e e
+ = =+ = ⇔ =+ = − = −
Es gibt nur eine freie Variable unendlich viele Schnittpunke + ein freier Parameter => schneiden sich in einer Geraden

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 32
Skalarprodukt Prüfen Sie, welche dieser Vektoren zusammen einen rechten Winkel einschließen
2 3 7
3 , 4 , 3
2 3 3
a b c
− − = − = − = − −
� � �
=> orthogonal => nicht orthogonal => orthogonal
Normalenvektor Wandeln Sie die Koordinatengleichung 1 2 33 6 12 3x x x− + = in eine Parameterdarstellung und
die Parameterdarstellung
4 1 1
0 1 0 ; ,
0 0 1
x k s k s
− = + + ∈
�ℝ in eine Koordinatengleichung um
Koordinatengleichung => Parameterdarstellung Parameterdarstellung => Koordinatengleichung
1 2 3
1 2 3
1 2 3
1 2 3
3 6 12 3
3 6 12 3
2 4 1
1 2 4
x x x
x x x
x x x
x x x
− + == − +
= − += + −
2x k= und 3x s= festlegen
1 2 3 1
2 2
3 3
1 2 4 1 2 4
1 2 4 1 2 4
0 1 0 ; ,
0 0 1
x x x x k s
x k x k
x s x s
k s
x k k s k s
s
= + − = + −= ⇔ == =
+ − − = = + + ∈
�ℝ
Normalenvektor bestimmen als Vektorprodukt der beiden Richtungsvektoren
( )( )
1 1 1 1 0 0 1 0 1
1 0 0 1 1 1 0 1 1
0 1 1 0 1 1 0 1 1
n
− ⋅ − ⋅ − = × = ⋅ − − ⋅ = + =
− ⋅ − ⋅ − −
�
d bestimmen als Skalarprodukt von Normalenvektor und Stützvektor
( )4 1 4
0 1 0 1 4 1 0 1 0 4
0 1 0
d n
= • = • = ⋅ + ⋅ + − ⋅ = −
�
Koordinatengleichung aufstellen
1 2 3
1
4 1 4
1
4
n x x
x x x
• = ⇔ • = −
+ − =
� � �
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2 3
3 4 2 3 3 4 2 3 6 12 6 0
2 3
2 7
3 3 2 7 3 3 2 3 14 9 6 17
2 3
3 7
4 3 3 7 4 3 3 3 21 12 9 0
3 3
a b
a c
b c
− • = − • − = ⋅ − + − ⋅ − + − ⋅ = − + − = −
− • = − • = ⋅ − + − ⋅ + − ⋅ − = − − + = − − −
− − • = − • = − ⋅ − + − ⋅ + ⋅ − = − − = −
� �
� �
� �

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 33
Abstandsbestimmung Bestimmen Sie den Abstand der Punkte ( )5 5 5P und ( )8 0 6Q − von der Ebene
1 2 3: 5 2 5E x x x+ − = −
Parameterdarstellung entwickeln
1 2 3 1 2 35 2 5 5 5 2x x x x x x+ − = − ⇔ = − − +
2x k= und 3x s= festlegen
2 3 1
2 2
3 3
5 5 2 5 5 2
5 5 2 5 5 2
0 1 0 ; ,
0 0 1
x x x x k s
x k x k
x s x s
k s
x k k s k s
s
= − − + = − − += ⇔ == =
− − + − − = = + + ∈
�ℝ
Gerade durch den Punkt mit Normalenvektor als Richtungsvektor aufstellen
( )5 5 5P ( )8 0 6Q −
5 1
5 5 ,
5 2
x r r
= + ∈ −
�ℝ
8 1
0 5 ,
6 2
x r r
− = + ∈ −
�ℝ
Schnittpunktbestimmung durch Gleichsetzen und Umformen 5 5 2 5 1
0 1 0 5 5
0 0 1 5 2
5 2 1 5 5 10
1 0 5 5 0 5
0 1 2 5 0 5
5 2 10 5 2 10
5 5
2 5
k s r
k s r
k s r r k s
k r
s r
− − + + = + −
− − + − = − = −
− + − = = − + −− = ⇔+ =
( ) ( )
5 5
2 5
5 5 5 2 2 5 10
25 25 4 10 10 29 25
530 25
65 1 25/ 6
55 5 5 / 6
65 2 40 / 6
k r
s r
r r r
r r r r
r r
x
= += − +
= − + + − + −= − − − + − = − −
= − ⇔ = −
= − = −
�
5 5 2 8 1
0 1 0 0 5
0 0 1 6 2
5 2 1 8 5 3
1 0 5 0 0 0
0 1 2 6 0 6
5 2 3 5 2
5 0
2 6
k s r
k s r
k s r r k s
k r
s r
− − − + + = + −
− − − − + − = − = −
− + − = − = − + +− = ⇔+ =
( ) ( )
3
5
2 6
5 5 2 2 6 3
25 4 12 3 29 15
130 15
28 1 7,5
10 5 2,5
26 2 5
k r
s r
r r r
r r r r
r r
x
== − +
= − + − + += − − + + = − +
= ⇔ =
− − = + = −
�
Länge des Abstandsvektors a�
bestimmen
2 2 2
25/ 6 5 5 / 6
5 / 6 5 25 / 6
40 / 6 5 10 / 6
5 25 10 1254,56
6 6 6 6
a PX x p
a
− = = − = − = −
= − + − + = ≈
� ���� � ��
�
( )22 2
7,5 8 0,5
2,5 0 2,5
5 6 1
0,5 2,5 1 7,5 2,74
a QX x q
a
− − = = − = − = −
= + + − = ≈
� ���� � �
�
Der Abstand beträgt etwa 4,56 Der Abstand beträgt etwa 2,74

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 34
Vektorprodukt Bestimmen Sie jeweils einen Vektor, der zu den zwei gegebenen Vektoren orthogonal ist
1 3
1 und 1
1 0
a b
= = −
� �
2 3
3 und 4
2 3
c d
− = − = − −
� ��
2 7
3 und 3
2 3
c e
− = − = − −
� �
3 7
4 und 3
3 3
d e
− − = − = −
�� �
( )
( )( ) ( ) ( )
( ) ( )( ) ( ) ( )
2 3 3 2
3 1 1 3
1 2 2 1
2 3 3 2
3 1 1 3
1 2 2 1
1 0 1 1 0 1 1
1 3 1 0 3 0 3
1 1 1 3 1 3 4
3 3 2 4 9
2 3 2 3
2 4 3 3
a b a b
a b a b a b
a b a b
c d c d
c d c d c d
c d c d
− ⋅ − ⋅ − + × = − = ⋅ − ⋅ = − =
− ⋅ − − ⋅ − − −
− − ⋅ − − ⋅ − − × = − = − ⋅ − − ⋅ =
− ⋅ − − − ⋅ −
� �
� ��
( ) ( ) ( )( ) ( ) ( )
( ) ( )
2 3 3 2
3 1 1 3
1 2 2 1
2 3 3 2
3 1 1 3
1 2 2 1
8 17
6 6 0
8 9 17
3 3 2 3 9 6 15
2 7 2 3 14 6 20
2 3 3 7 6 21 15
c e c e
c e c e c e
c e c e
d e d e
d e d e d e
d e d e
− − − = − − −
− − ⋅ − − − ⋅ + × = − = − ⋅ − − ⋅ − = + =
− ⋅ − − ⋅ − − −
− × = − −
� �
�� �( ) ( )( ) ( ) ( )
( ) ( ) ( )
4 3 3 3 12 9 3
3 7 3 3 21 9 30
3 3 4 7 9 28 37
− ⋅ − − ⋅ − = ⋅ − − − ⋅ − = − − = −
− ⋅ − − ⋅ − − − −
Länge von Vektoren Bestimmen Sie die Seitenlängen des Dreiecks ABC:
( )5 0 2A − , ( )11 5B − und ( )8 7 0C −
– Seitenlängen durch Vektoren beschreiben 8 1 9
7 1 8
0 5 5
BC
− = − − = − −
����
8 5 3
7 0 7
0 2 2
AC
= − − = − −
����
1 5 6
1 0 1
5 2 7
AB
− − = − = −
����
– Länge der Vektoren bestimmen
( ) ( )
( )
( )
2 22
22 2
2 2 2
9 8 5 170 13,04
3 7 2 62 7,87
6 1 7 86 9,27
a BC
b AC
c AB
= = + − + − = ≈
= = + − + = ≈
= = − + + = ≈
����
����
����

Bjarne Kolb Lernen für das Abitur – Vektoren Seite 35
Winkelberechnung Bestimmen Sie die folgenden Winkel
1
1
1
a
=
�
3
1
0
b
= −
�
7
6
2
c
− = −
�
0
3
4
d
= −
��
0 2
: 9 2 ,
3 5
g x k k
= − + − ∈
�ℝ
1 3
: 2 2 ,
3 1
h x k k
− = + ∈
�ℝ
1 1 1 3: 2 2 2 8E x x x+ − = 2 1 1 3: 4 3 7E x x x− + − = 3 1 1 3:5 6 1E x x x− + = −
(1) ( ),a bϕ =� �
∢ (2) ( ),a cϕ =� �
∢ (3) ( ),a dϕ =� ��
∢ (4) ( ),b cϕ =� �
∢
(5) ( ),b dϕ =� ��
∢ (6) ( ),c dϕ =� ��
∢ (7) ( ),g hϕ =∢ (8) ( )1,g Eϕ =∢
(9) ( )1,h Eϕ =∢ (10) ( )2,g Eϕ =∢ (11) ( )1 2,E Eϕ =∢ (12) ( )1 3,E Eϕ =∢
(1)
( )( )
1 1 2 2 3 3
2 2 2 2 2 21 2 3 1 2 3
22 2 2 2 2
cos
1 3 1 1 1 0 2 20,365 68,58
3 10 301 1 1 3 1 0
a b a b a ba b
a b a a a b b bϕ
ϕ
+ +•= =⋅ + + ⋅ + +
⋅ + ⋅ − + ⋅= = = ≈ ⇒ ≈ °
⋅+ + ⋅ + − +
� �
� �
(2)
( ) ( )( ) ( )
1 1 2 2 3 3
2 2 2 2 2 21 2 3 1 2 3
2 22 2 2 2
cos
1 7 1 6 1 2 3 20,184 100,58
3 89 2671 1 1 7 6 2
a c a c a ca c
a c a a a c c cϕ
ϕ
+ +•= =⋅ + + ⋅ + +
⋅ − + ⋅ + ⋅ − −= = = ≈ − ⇒ ≈ °⋅+ + ⋅ − + + −
� �
� �
(3)
( )( )
1 1 2 2 3 3
2 2 2 2 2 21 2 3 1 2 3
22 2 2 2 2
cos
1 0 1 3 1 0 1 10,115 83,37
3 25 751 1 1 0 3 4
a d a d a da d
a d a a a d d dϕ
ϕ
+ +•= =⋅ + + ⋅ + +
⋅ + ⋅ − + ⋅= = = ≈ ⇒ ≈ °
⋅+ + ⋅ + − +
� ��
� ��
(4)
( ) ( ) ( )( ) ( ) ( )
1 1 2 2 3 3
2 2 2 2 2 21 2 3 1 2 3
2 2 22 2 2
cos
3 7 1 6 0 2 27 270,905 154,83
10 89 8903 1 0 7 6 2
b c b c b cb c
b c b b b c c cϕ
ϕ
+ +•= =⋅ + + ⋅ + +
⋅ − + − ⋅ + ⋅ − − −= = = ≈ − ⇒ ≈ °⋅+ − + ⋅ − + + −
� �
� �
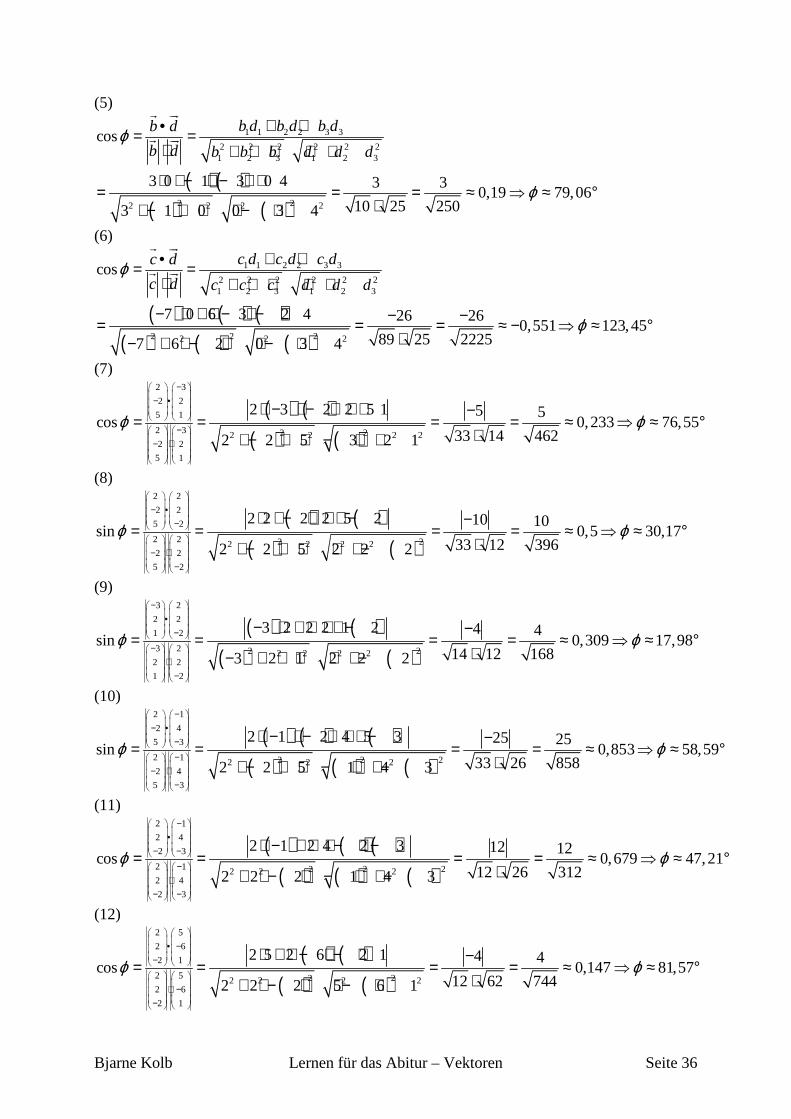
Bjarne Kolb Lernen für das Abitur – Vektoren Seite 36
(5)
( ) ( )( ) ( )
1 1 2 2 3 3
2 2 2 2 2 21 2 3 1 2 3
2 22 2 2 2
cos
3 0 1 3 0 4 3 30,19 79,06
10 25 2503 1 0 0 3 4
b d b d b db d
b d b b b d d dϕ
ϕ
+ +•= =⋅ + + ⋅ + +
⋅ + − ⋅ − + ⋅= = = ≈ ⇒ ≈ °
⋅+ − + ⋅ + − +
� ��
� ��
(6)
( ) ( ) ( )( ) ( ) ( )
1 1 2 2 3 3
2 2 2 2 2 21 2 3 1 2 3
2 2 22 2 2
cos
7 0 6 3 2 4 26 260,551 123,45
89 25 22257 6 2 0 3 4
c d c d c dc d
c d c c c d d dϕ
ϕ
+ +•= =⋅ + + ⋅ + +
− ⋅ + ⋅ − + − ⋅ − −= = = ≈ − ⇒ ≈ °⋅− + + − ⋅ + − +
� ��
� ��
(7)
( ) ( )( ) ( )
2 3
2 2
5 1
2 3 2 22 2 2 22 2
5 1
2 3 2 2 5 1 5 5cos 0,233 76,55
33 14 4622 2 5 3 2 1ϕ ϕ
− − •
− − ⋅
⋅ − + − ⋅ + ⋅ −= = = = ≈ ⇒ ≈ °
⋅+ − + ⋅ − + +
(8)
( ) ( )( ) ( )
2 2
2 2
5 2
2 2 2 22 2 2 22 2
5 2
2 2 2 2 5 2 10 10sin 0,5 30,17
33 12 3962 2 5 2 2 2ϕ ϕ
− • −
− ⋅ −
⋅ + − ⋅ + ⋅ − −= = = = ≈ ⇒ ≈ °
⋅+ − + ⋅ + + −
(9)
( ) ( )( ) ( )
3 2
2 2
1 2
3 2 2 22 2 2 22 2
1 2
3 2 2 2 1 2 4 4sin 0,309 17,98
14 12 1683 2 1 2 2 2ϕ ϕ
− • −
− ⋅ −
− ⋅ + ⋅ + ⋅ − −= = = = ≈ ⇒ ≈ °
⋅− + + ⋅ + + −
(10)
( ) ( ) ( )( ) ( ) ( )
2 1
2 4
5 3
2 1 2 2 22 2 22 4
5 3
2 1 2 4 5 3 25 25sin 0,853 58,59
33 26 8582 2 5 1 4 3ϕ ϕ
− − • −
− − ⋅ −
⋅ − + − ⋅ + ⋅ − −= = = = ≈ ⇒ ≈ °
⋅+ − + ⋅ − + + −
(11)
( ) ( ) ( )( ) ( ) ( )
2 1
2 4
2 3
2 1 2 2 22 2 22 4
2 3
2 1 2 4 2 3 12 12cos 0,679 47,21
12 26 3122 2 2 1 4 3ϕ ϕ
− • − −
− ⋅ − −
⋅ − + ⋅ + − ⋅ −= = = = ≈ ⇒ ≈ °
⋅+ + − ⋅ − + + −
(12)
( ) ( )( ) ( )
2 5
2 6
2 1
2 5 2 22 2 2 22 6
2 1
2 5 2 6 2 1 4 4cos 0,147 81,57
12 62 7442 2 2 5 6 1ϕ ϕ
• − −
⋅ − −
⋅ + ⋅ − + − ⋅ −= = = = ≈ ⇒ ≈ °
⋅+ + − ⋅ + − +

Bjarne Kolb
x
y
Analysis
Wachstumsprozesse
Lernen für das Abitur

Bjarne Kolb Lernen für das Abitur – Wachstum
Inhalt
- Zusammenfassung Seite 3 - Beispielrechnungen Seite 10

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 3
x
y
Abb. 2Lineare
Abnahme
x
y
Abb. 4Exponentieller
Zerfaf ll
x
y
Abb. 6Begrenzte
Abnahme
x
y
Abb. 7Logistisches
Wachstum
x
y
Abb. 1Lineares
Wachstum
x
y
Abb. 3Exponentielles
Wachstum
x
y
Abb. 5Begrenztes
Wachstum
Wachstumsprozesse allgemein Wachstumsprozesse sind einer der größten Anwendungsbereiche der Mathematik. Reale (teilweise auch idealisierte) Wachstums- oder Zerfallsprozesse werden dabei näherungsweise durch Funktionen wiedergegeben. Es gibt unbegrenzt viele verschiedene Arten von Wachstumsprozessen, im Normalfall wird aber nur verlangt, vier von diesen genauer zu kennen:
Lineare Wachstumsprozesse
Exponentielle Wachstumsprozesse
Begrenzte (exponentielle) Wachstumsprozesse
Logistische Wachstumsprozesse
Wie zu erkennen ist, wird unter anderem auch zwischen positivem (normalem) Wachstum und nnegativem Wachstum (Abnahme oder Zerfall) unterschieden. Da sich aber nur ein Vorzeichen in der jeweiligen Funktion ändert, kann man es zuerst einmal vernachlässigen

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 4
Wachstumsgeschwindigkeit Wenn man in der Mathematik mit Wachstum arbeitet, betrachtet man selten nur die absoluten Werte der betrachteten Größe. Sehr häufig gibt man auch die Wachstumsgeschwindigkeit an. Die Wachstumsgeschwindigkeit entspricht der Ableitung der Funktion des Wachstumsprozesses.
Der Vorteil daran, zu der eigentlichen Funktion auch die Geschwindigkeitsfunktion anzugeben, ist, dass man zum einen direkt ablesen kann, ob ein positives oder negatives Wachstum vorliegt, weil man nicht zwei Werte vergleichen, sondern nur das Vorzeichen der Ableitung beachten muss. Außerdem kann man an der Ableitung erkennen, ob das Wachstum bzw. die Abnahme beschleunigt oder verlangsamt wird
Differenzialgleichung Da die Ableitungen der Wachstumsprozesse zum Teil sehr komplizierte Gleichungen sind, werden die Wachstumsgeschwindigkeiten bei den vier oben genannten Wachstumsprozessen meistens mit Hilfe der Funktionsgleichung wiedergegeben. Diese Art von Gleichung nennt man Differenzialgleichung, Differenzialgleichungen beschränken sich aber nicht auf die erste Ableitung, man kann auch weitere Ableitungen auf diese Art ausdrücken
Die Differenzialgleichungen, kurz DGL, haben noch einen anderen Nutzen. Jeder der standardmäßigen Wachstumsprozesse hat eine charakteristische Differenzialgleichung, an der man die Art des Prozesses und bestimmte Proportionalitäten zwischen Funktion und Ableitung erkennen kann
Hat man zum Beispiel eine e-Funktion mit einem quadratischen Term im Exponenten
( ) ( )2
0 ax bxf x f e += ⋅
ergibt sich als Ableitung zwar kein sehr komplizierter, aber trotzdem ein unnötig langer Term:
( ) ( ) ( )2
' 2 0 ax bxf x ax b f e += + ⋅ ⋅
Ersetzt man den rechten Teil durch die Ausgangsfunktion, erhält man die DGL, die in diesem Fall kürzer ist und keine Potenz enthält:
( ) ( ) ( )' 2f x ax b f x= + ⋅
Wichtig ist es, zu beachten, dass der Anfangswert in der DGL bei den Wachstumsprozessen keine Rolle spielt. Man kann also an der Differenzialgleichung zwar einfach das Wachstumsmodell erkennen, man braucht aber einen weiteren Wert, um die Funktion vollständig aufzustellen

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 5
Lineare Wachstumsprozesse Lineare Wachstumsprozesse sind mathematisch betrachtet die einfachste Art von Wachstum. Ein Wachstum wird als linear bezeichnet, wenn die Werte in der gleichen Zeitspanne (z.B. 1 Tag) immer um denselben Betrag (z.B. 20m) zunehmen bzw. abnehmen. Aus diesem Grund kann man lineares Wachstum auch als gleichmäßiges Wachstum bezeichnen.
Die Funktion zu einem linearen Wachstum ist, leicht nachvollziehbar, eine lineare Funktion:
( ) ( )0f x f k x= + ⋅
f(0) ist der Anfangswert, k entspricht dem Zuwachs pro Zeit und x gibt die Zeit an.
Hat man zum Beispiel eine zu Beginn der Bauarbeiten 10 Meter lange Straße, die pro Tag um 20 Meter verlängert wird, erhält man als Funktion (mit t statt x):
( ) 10 20f t t= +
Die charakteristische Differenzialgleichung des linearen Wachstums lautet:
( )'f x k=
Die Wachstumsgeschwindigkeit ist also konstant. Sie entspricht dem Zuwachs pro Zeit (auch naheliegend). Für das Beispiel mit der Straße erhält man:
( )' 20f t =
x
y
Abb. 8Lineares
Wachstum
∆x
∆x
k
k
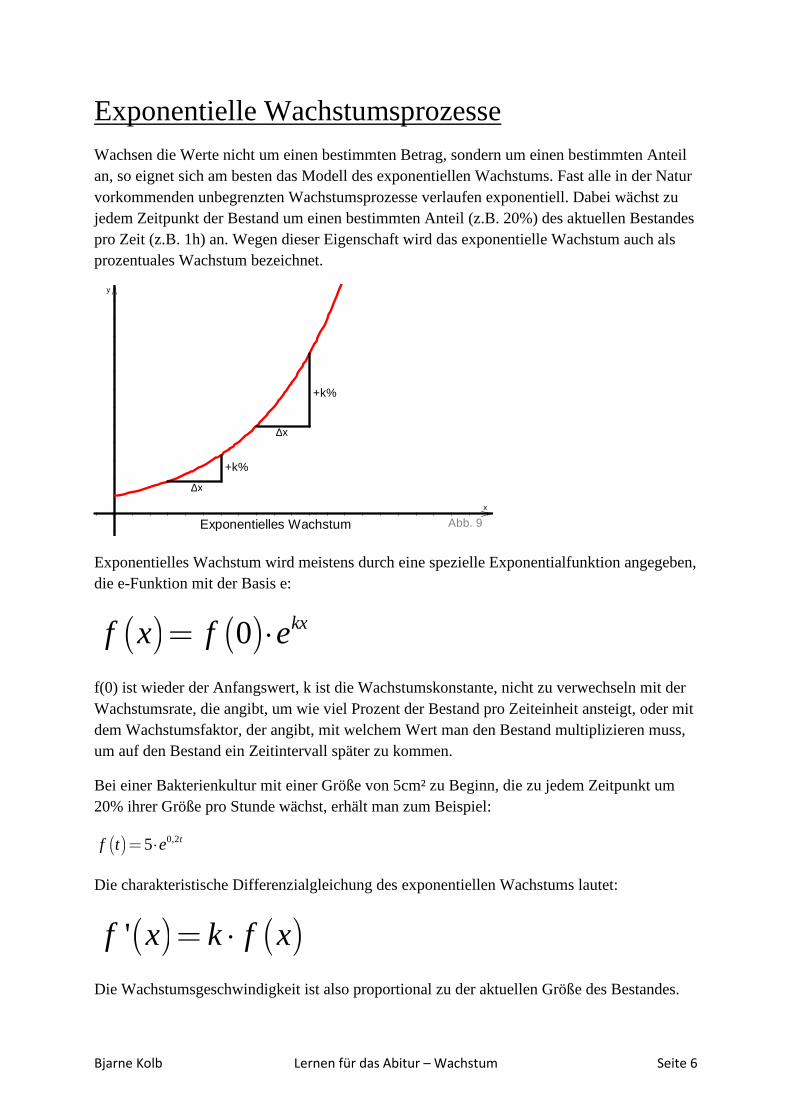
Bjarne Kolb Lernen für das Abitur – Wachstum Seite 6
Exponentielle Wachstumsprozesse Wachsen die Werte nicht um einen bestimmten Betrag, sondern um einen bestimmten Anteil an, so eignet sich am besten das Modell des exponentiellen Wachstums. Fast alle in der Natur vorkommenden unbegrenzten Wachstumsprozesse verlaufen exponentiell. Dabei wächst zu jedem Zeitpunkt der Bestand um einen bestimmten Anteil (z.B. 20%) des aktuellen Bestandes pro Zeit (z.B. 1h) an. Wegen dieser Eigenschaft wird das exponentielle Wachstum auch als prozentuales Wachstum bezeichnet.
Exponentielles Wachstum wird meistens durch eine spezielle Exponentialfunktion angegeben, die e-Funktion mit der Basis e:
( ) ( )0 kxf x f e= ⋅
f(0) ist wieder der Anfangswert, k ist die Wachstumskonstante, nicht zu verwechseln mit der Wachstumsrate, die angibt, um wie viel Prozent der Bestand pro Zeiteinheit ansteigt, oder mit dem Wachstumsfaktor, der angibt, mit welchem Wert man den Bestand multiplizieren muss, um auf den Bestand ein Zeitintervall später zu kommen.
Bei einer Bakterienkultur mit einer Größe von 5cm² zu Beginn, die zu jedem Zeitpunkt um 20% ihrer Größe pro Stunde wächst, erhält man zum Beispiel:
( ) 0,25 tf t e= ⋅
Die charakteristische Differenzialgleichung des exponentiellen Wachstums lautet:
( ) ( )'f x k f x= ⋅
Die Wachstumsgeschwindigkeit ist also proportional zu der aktuellen Größe des Bestandes.
x
y
Abb. 9Exponentielles
Wachstum
∆x
∆x
+k%
+k%

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 7
2 4 6 8 10 12 14 16 18 20 22 24 26
-2
2
4
6
8
10
12
14
16
x
y
+k%
+k%∆x
∆x
Begrenztes Wachstum
Abb. 10
Begrenzte Wachstumsprozesse
Begrenztes Wachstum ist dem exponentiellen sehr ähnlich. Es liegt vor, wenn eine Zunahme sich einer bestimmten Grenze, der Sättigungsgrenze, annähert, oder auch, wenn eine Abnahme gegen einen anderen Wert als 0 läuft. Der Bestand wächst oder fällt um einen bestimmten Anteil (z.B. 15%) des Sättigungsmankos, d.h. der Differenz zwischen aktuellem Bestand und Sättigungsmanko, pro Zeit (z.B. 1 min).
Begrenztes Wachstum wird auch durch eine e-Funktion angegeben, aber immer mit negativem Exponenten.
( ) ( )( )0 ; 0kxf x S f S e k−= + − ⋅ >
f(0) ist der Anfangswert, S die Sättigungsgrenze und k wieder die Wachstumskonstante.
Lässt man zum Beispiel Milch mit einer Temperatur von 7° aus dem Kühlschrank nimmt, sodass sie sich auf Raumtemperatur (16°) erwärmt, wobei die Temperatur zu jedem Zeitpunkt um 15% des Sättigungsmankos pro Minute ansteigt, ergibt sich:
( ) ( ) 0,15 0,1516 7 16 16 9t tf t e e− −= + − ⋅ = − ⋅
Die für begrenztes Wachstum charakteristische DGL lautet:
( ) ( )( )'f x k f x S=− ⋅ −
Die Wachstumsgeschwindigkeit beim begrenzten Wachstum ist damit also proportional zum Sättigungsmanko.
Für das Beispiel mit der Tasse Kaffee erhält man:
( ) ( )( )' 0,15 16f t f t=− ⋅ −

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 8
( )( )
( ) ( )( )( )( )
1
0
0
0 0 1 1kx kxS
f
S f Sf x
f S f e e− −
⋅= =
+ − ⋅ + − ⋅
( )( )
( ) ( )( )( )( )
2
0
0
0 0 1 1kSx kSxS
f
S f Sf x
f S f e e− −
⋅= =
+ − ⋅ + − ⋅
( ) ( ) ( )( )1 'k
f x f x S f xS
= ⋅ ⋅ −
( ) ( ) ( )( )2 'f x k f x S f x= ⋅ ⋅ −
Logistisches Wachstum Beim begrenzten Wachstum ist die Wachstumsgeschwindigkeit zu Beginn maximal. In der Natur kommt es aber auch oft vor, dass ein Prozess zunächst langsam anläuft. Dann redet man von logistischem Wachstum, am Anfang entspricht es annähernd exponentiellem Wachstum, am Ende begrenztem.
Für die allgemeine Funktionsgleichung des logistischen Wachstums hat man zwei Möglichkeiten:
f(0) ist wieder der Anfangswert, S die Sättigungsgrenze. Bei der ersten Gleichung ist k die Wachstumskonstante, bei der zweiten der Proportionalitätsfaktor. Wichtig ist, zu beachten, dass die beiden allgemeinen Funktionen am Ende dieselbe Funktion ergeben, lediglich der Wert des Parameters k ist verschieden. Auch in der DGL zeigt sich ein Unterschied:
Die Wachstumsgeschwindigkeit ist proportional sowohl zu dem Bestand (wie beim exponentiellen Wachstum) als auch zum Sättigungsmanko (wie beim begrenzten Wachstum).
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
-2
2
4
6
8
10
12
14
16
18
20
x
y
Logistisches Wachstum Abb.
11

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 9
Bestimmen von Wachstumsfunktionen
Die Wachstumsarten theoretisch zu kennen ist natürlich die Grundlage, aber wichtiger ist es, konkrete Funktionen zu den Wachstumsarten bestimmen zu können.
Als ersten Schritt muss man erkennen, welche Art von Wachstum vorliegt. Hat man mehrere Wertepaare gegeben, kann man sie zeichnen lassen, um die Wachstumsart zu erkennen, hat man dagegen einen Text gegeben, muss man diesem die nötigen Informationen entnehmen.
Beispiel: Es liegt ein logistisches Wachstum vor.
Danach gibt es zwei Möglichkeiten, weiter vorzugehen:
Wenn man viele Werte gegeben hat und keine weiteren Informationen, ist eine Regression sinnvoll. Für lineares Wachstum verwendet man LinReg, für exponentielles Wachstum ExpReg und für logistisches Wachstum Logistic. Bei dem begrenzten Wachstum muss man zunächst die Differenz aller Werte zur Sättigungsgrenze bestimmen, um dann eine exponentielle Regression mit diesem Sättigungsmanko durchzuführen.
Beispiel: Ergebnis:
Sind dagegen die wichtigsten Informationen gegeben, d.h. einige der Größen Anfangswert, Sättigungsgrenze (falls vorhanden) und k, setzt man diese Werte einfach in die allgemeine Funktion ein. Steht noch ein unbekannter Parameter in der Funktion (meistens k), benötigt man ein einzelnes Wertepaar, das man in die Funktion einsetzt, um diesen zu bestimmen.
Beispiel: […] Es kann von einem logistischen Wachstum ausgegangen werden. Zu Anfang hat der Bestand die Größe 1, größer als 20 kann er nicht werden. […]:
( ) 0,10,1
20 2020 1 191 11
xx
f xe
e−
−
= = + ⋅+ − ⋅

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 10
Bestimmung von Wachstumsfunktionen Geben Sie begründet die Art des Wachstums an und bestimmen Sie die Wachstumsfunktion.
(1)
(2)
(3) Eine Bakterienkultur verdoppelt ihre Größe in jeder Minute. Am Anfang ist nur ein einzelnes Bakterium vorhanden.
(4) ( ) ( )' 2 0 100f x f=− =
(5) In einem Experiment werden 100 gesunde Ratten zusammen mit 100 infizierten Ratten eingesperrt. Jeden Tag infiziert sich die Hälfte der infizierten Ratten.
(6) ( ) ( ) ( )' 1,5 0 1f x f x f= ⋅ =
(7) ( ) ( ) ( )( ) ( )' 0,004 20 0 2f x f x f x f=− ⋅ ⋅ − =
(8)
(9) Eine Bakterienkultur auf einem Nährboden (50cm²) bedeckt zu Anfang 1cm². Am Ende bedeckt sie den Nährboden vollständig. Nach 3 Minuten sind 5cm² bedeckt.
(10)
(11) Bei der Verlängerung einer 200m langen Straße gehen die Bauarbeiten gleichmäßig mit 10m am Tag voran.
(12) ( ) ( )( ) ( )' 0,25 10 0 20f x f x f=− ⋅ − =
Lösungen:
(1)
Es liegt begrenztes Wachstum vor, weil sich die Werte einer bestimmten Grenze annähern und die Wachstumsgeschwindigkeit am Anfang maximal ist.
Um die Funktion bestimmen zu können, muss man zunächst aus den Werten das Sättigungsmanko, also die Differenz der Werte zur Sättigungsgrenze (30), berechnen:
x 0 4 8 12 16 20 24 y 10 21 26 28,2 29,3 29,6 29,8
x 0 2 4 6 8 10 15 20 25 y 5 9 15 23 31 38 47 49 50
x 0 5 10 15 20 25 30 y 10 4,3 1,9 0,8 0,4 0,2 0,1
x 0 5 10 15 20 25 30 35 40 45 50 y 30 34 37 41 44 48 51 55 59 62 66
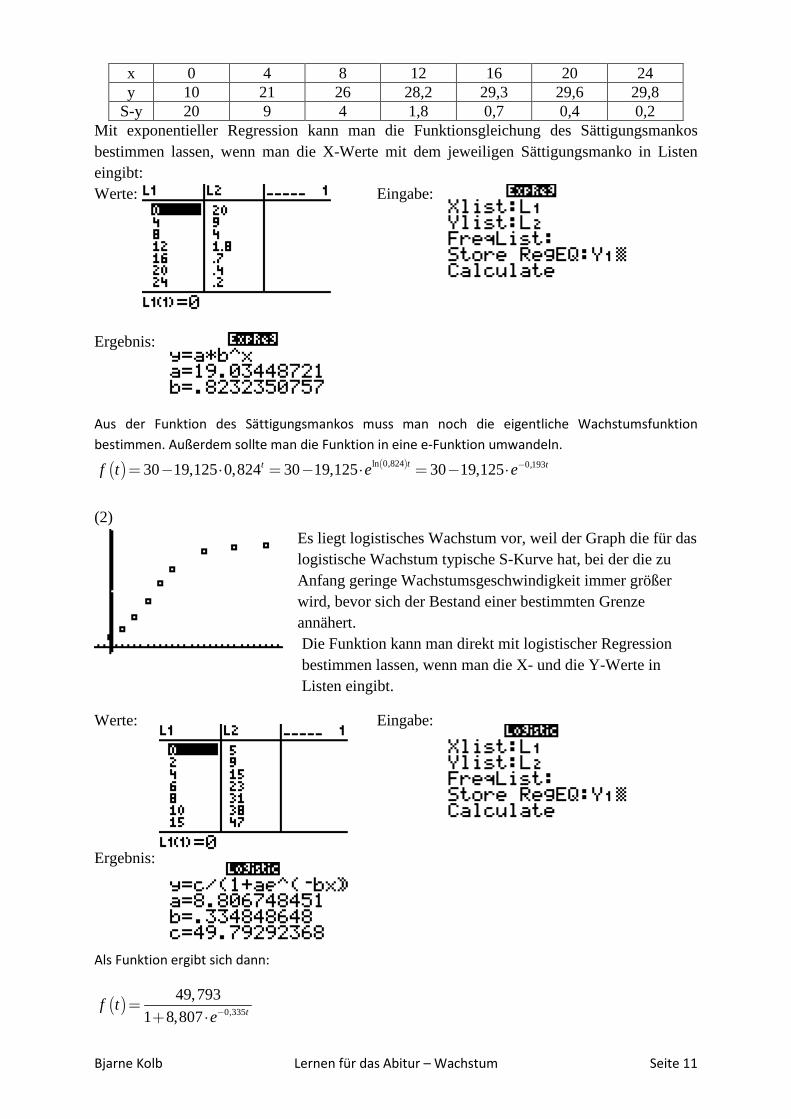
Bjarne Kolb Lernen für das Abitur – Wachstum Seite 11
Mit exponentieller Regression kann man die Funktionsgleichung des Sättigungsmankos bestimmen lassen, wenn man die X-Werte mit dem jeweiligen Sättigungsmanko in Listen eingibt: Werte: Eingabe: Ergebnis:
Aus der Funktion des Sättigungsmankos muss man noch die eigentliche Wachstumsfunktion
bestimmen. Außerdem sollte man die Funktion in eine e-Funktion umwandeln.
( ) ( )ln 0,824 0,19330 19,125 0,824 30 19,125 30 19,125tt tf t e e−= − ⋅ = − ⋅ = − ⋅
(2)
Es liegt logistisches Wachstum vor, weil der Graph die für das logistische Wachstum typische S-Kurve hat, bei der die zu Anfang geringe Wachstumsgeschwindigkeit immer größer wird, bevor sich der Bestand einer bestimmten Grenze annähert. Die Funktion kann man direkt mit logistischer Regression bestimmen lassen, wenn man die X- und die Y-Werte in Listen eingibt.
Werte: Eingabe:
Ergebnis:
Als Funktion ergibt sich dann:
( ) 0,335
49,793
1 8,807 tf t
e−=+ ⋅
x 0 4 8 12 16 20 24 y 10 21 26 28,2 29,3 29,6 29,8
S-y 20 9 4 1,8 0,7 0,4 0,2

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 12
(3)
Der Bestand wächst um den gleichen Anteil (100%) pro Minute. Deswegen liegt exponentielles Wachstum vor. Mit dem Anfangswert 1 ergibt sich:
( ) ( )ln 2 0,6931 2 tt tf t e e= ⋅ = =
(4)
( ) ( )' 2 0 100f x f=− =
Die Ableitung ist ein konstanter Faktor, deswegen liegt lineares Wachstum vor.
( ) ( )0 2 100 2f x f x x= − = −
(5) Es liegt begrenztes Wachstum vor, weil die Wachstumsgeschwindigkeit nicht von der Anzahl der infizierten Ratten, sondern von der Anzahl der noch nicht infizierten Ratten abhängt (also von dem Sättigungsmanko). Die Sättigungsgrenze entspricht der Anzahl aller Ratten (200), das Sättigungsmanko zu Anfang entspricht der Anzahl gesunder Ratten zu Beginn (100), und jeden Tag wird dieses Sättigungsmanko halbiert:
( ) ( )ln 0,5 0,693200 100 0,5 200 100 200 100tt tf t e e−= − ⋅ = − ⋅ = − ⋅
(6)
( ) ( ) ( )' 1,5 0 1f x f x f= ⋅ =
Die Wachstumsgeschwindigkeit ist proportional zum Bestand, ein Zeichen für exponentielles Wachstum:
( ) ( ) 1,5 1,5 1,50 =1x x xf x f e e e= ⋅ ⋅ =
(7)
( ) ( ) ( )( ) ( )' 0,004 20 0 2f x f x f x f=− ⋅ ⋅ − =
Es liegt logistisches Wachstum vor, weil die Wachstumsgeschwindigkeit proportional sowohl zum Bestand als auch zum Sättigungsmanko ist.
( ) 0,080,004 20
20 2020 1 91 12
xx
f xe
e−
− ⋅ ⋅
= = + ⋅+ − ⋅

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 13
(8) Es liegt exponentielles Wachstum vor, weil die Werte zunächst groß sind und sich dann der X-Achse, also dem Wert 0 annähern. Die Funktion kann man mit exponentieller Regression bestimmen lassen, wenn man die Werte vorher in Listen eingibt.
Werte: Eingabe:
Ergebnis:
( ) ( )ln 0,858 0,1549,134 0,858 9,134 9,134tt tf t e e−= ⋅ = ⋅ = ⋅
(9) Bakterien vermehren sich im Normalfall exponentiell. Da es aber eine feste Obergrenze durch räumliche Einschränkung gibt, liegt logistisches Wachstum vor. Der Startwert beträgt 1, die Sättigungsgrenze entspricht der Größe des Nährbodens (50).
( )50 50
50 1 491 11
ktkt
f te
e−
−
= = + ⋅+ − ⋅
Nach 3 Minuten wird eine Fläche von 5 erreicht:
( ) ( )
( )
3 3 33
3
0,565
503 5 5 50 5 1 49 1 49 10 49 9
1 49
9ln
9 9 493 ln 0,565
49 49 3
50
1 49
k k kk
k
t
f e e ee
e k k
f te
− − −
− ⋅
−
−
= ⇔ = ⇔ = ⋅ + ⋅ ⇔ + ⋅ = ⇔ =+ ⋅
= ⇔− = ⇔ =− ≈
=+ ⋅

Bjarne Kolb Lernen für das Abitur – Wachstum Seite 14
(10) Die Werte liegen alle auf einer Geraden, deswegen liegt lineares Wachstum vor. Mit linearer Regression kann man einfach die Funktionsgleichung bestimmen.
Werte: Eingabe:
Ergebnis:
( ) 0,715 30,045f t t= +
(11)
Die Straße wird um einen konstanten Wert (10) pro Tag länger, deswegen liegt lineares Wachstum
vor.
( ) 200 10f t t= +
(12)
( ) ( )( ) ( )' 0,25 10 0 20f x f x f=− ⋅ − =
Es liegt begrenztes Wachstum vor, weil die Wachstumsgeschwindigkeit von dem Sättigungsmanko abhängt.
( ) ( ) 0,25 0,2510 20 10 10 10x xf x e e− −= + − ⋅ = +




























