Embed Size (px)
Citation preview
www.fugro.com
Geospatial Data Accuracy: Metrics and Assessment
Qassim A. Abdullah, Ph.D.Fugro EarthData, Inc.
PDAD Special Session 39 : Sensor Calibration and Data Product Accuracy
ASPRS 2012 Annual Convention March 22, 2012 Sacramento, CA

www.fugro.com
Sensors Technologies Today
1) Silicon Electronics made it possible to build: Large Format Aerial Mapping Camera Medium Format Aerial Mapping Camera Small Format Multi-purpose Camera Special Application Mapping Sensors
– Panoramic and Oblique Camera– Thermal Sensors– Multi-Spectral/Hyper-spectral Sensors
Space-based imaging Sensors
2) LiDAR 3) IFSAR
Image courtesy, Microsoft

www.fugro.com
Push Broom Panoramic
Framing
Oblique
Today’s Geospatial Data Acquisition: Very Complex World
LiDAR

www.fugro.com
Complex mapping processes …
Complex technologies result in complex processes
– How Complex are today’s technologies?• A laser system generate millions of pulses per second flown at speed of 200 – 300
knots
• A space-based imaging Radar provide DEM of Earth Terrain with vertical accuracy of 1 meter or better
• How about a full waveform digitization laser that record object surface every 2 nano second?
Human skills and knowledge may sometimes be lacking the proper understanding of such complex technologies
Proper training is essential to solve such complex puzzle
Not understanding the complex technologies leads to errors in the acquired data

www.fugro.com
Types of Errors In Geospatial Data
FACT: Errors can be minimized but can never be eliminated…
Gross errors or “blunders”They can be of any size or nature, and tend to occur through carelessness.
Random Errors: are the small differences between repeated measurements of the samequantity– often of the order of the finest division in the measuring scale or
device– It can be caused by operator skill level– Random errors have very definite statistical behavior and so can be dealt with by
statistical methods– It can be minimized but not eliminated
Systematic Errors:are those which we can be modeled mathematically and therefore correctedExamples: GPS problems, camera calibration, earth curvature, atmospheric effects, inaccurate leverarm determination, etc.
www.fugro.com
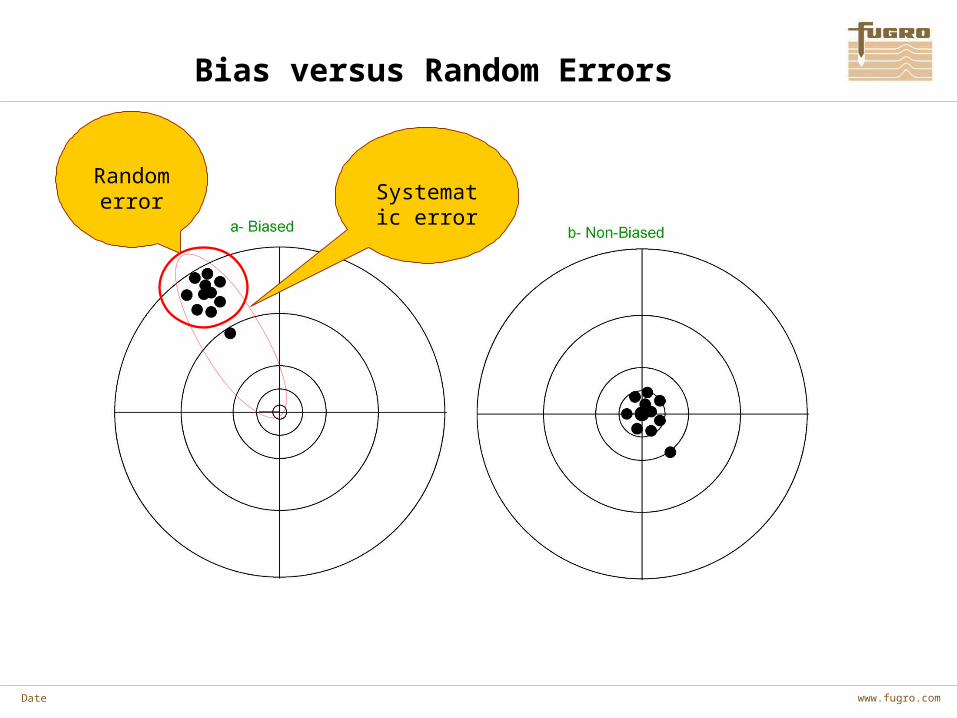
Bias versus Random Errors
Date
Random error Systematic
error

www.fugro.com
Actions Required to Minimize the Occurrence of Errors
Project planning stage:– Follow manufacturers recommendation on operating the sensor– Stay within the limits of the operation parameters of the auxiliary
systems such as GPS and IMU
Data Processing stage:– Sensor orientation determination:
• Do not compromise aerial triangulation or the boresight processes• Plan extra check points within the project area• Make sure you have the correct calibration for the system
– Datum Confirmation:• Make sure that you are using the right vertical and horizontal datum• Avoid using older datums as they may not be that accurate (i.e.
NAD27, NAD83/86, WGS84(transit), etc.)

www.fugro.com
Bias in Map Coordinates
Example of bias caused by confusing NAD83(86) and HARN in Indiana SPC

www.fugro.com
Mean (Bias) -0.47 -0.01
StDEV 0.22 0.26
RMSE 0.52 ft 0.25 ft
An RMSE of 0.52 ft will cause a rejection to ortho delivery mapped at 1”=50’ scale
Allowed RMSE according to ASPRS standard = ±0.50’
Mean (Bias) 0.00 0.00
StDEV 0.22 0.26
RMSE 0.21 0.25
Results after Bias removal
Biased observations

www.fugro.com
What every user want beside pretty pictures?
Thermal Imagery GSD = 50 cm Altitude 2,300 ft

www.fugro.com
User is interested in:
Accurate Data– Discriminator:
• Check points fit• High definition/ high resolution
Clean Data– Discriminator:
• Matching mosaic lines (Both imagery and LiDAR)• Noise free Data (for LiDAR)• Decent radiometric quality (if optical imagery)
Manageable Data– Discriminator
• Common file format• Optimized data size (i.e. lossless compression)
www.fugro.com
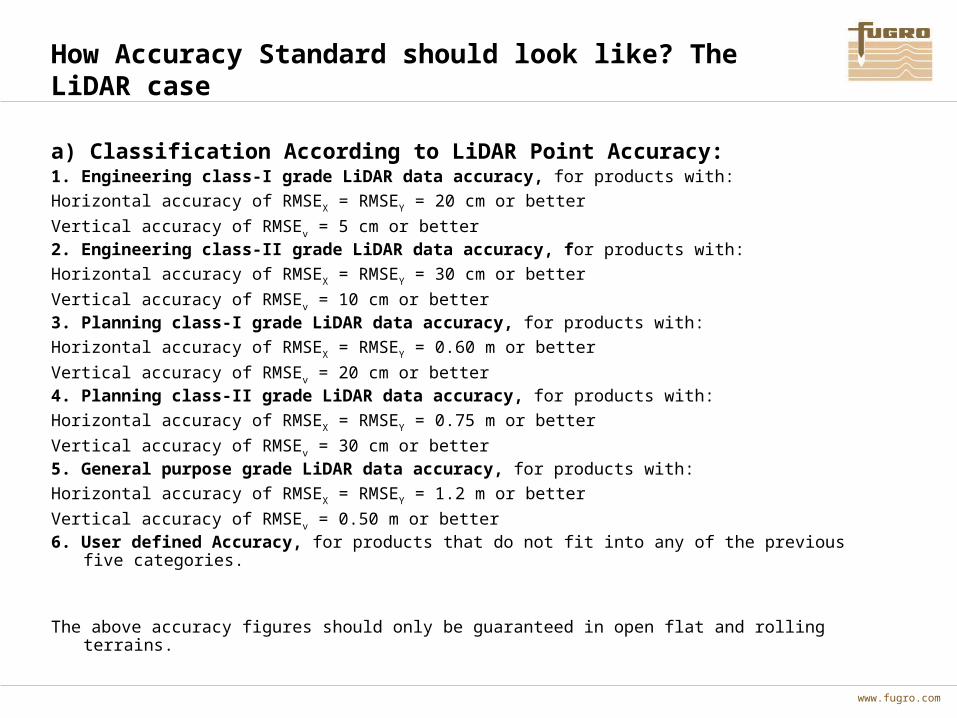
How Accuracy Standard should look like? The LiDAR case
a) Classification According to LiDAR Point Accuracy:1. Engineering class-I grade LiDAR data accuracy, for products with:
Horizontal accuracy of RMSEX = RMSEY = 20 cm or better
Vertical accuracy of RMSEv = 5 cm or better2. Engineering class-II grade LiDAR data accuracy, for products with:
Horizontal accuracy of RMSEX = RMSEY = 30 cm or better
Vertical accuracy of RMSEv = 10 cm or better3. Planning class-I grade LiDAR data accuracy, for products with:
Horizontal accuracy of RMSEX = RMSEY = 0.60 m or better
Vertical accuracy of RMSEv = 20 cm or better 4. Planning class-II grade LiDAR data accuracy, for products with:
Horizontal accuracy of RMSEX = RMSEY = 0.75 m or better
Vertical accuracy of RMSEv = 30 cm or better 5. General purpose grade LiDAR data accuracy, for products with:
Horizontal accuracy of RMSEX = RMSEY = 1.2 m or better
Vertical accuracy of RMSEv = 0.50 m or better6. User defined Accuracy, for products that do not fit into any of the previous five categories.
The above accuracy figures should only be guaranteed in open flat and rolling terrains.

www.fugro.com
How Accuracy Standard should look like? The LiDAR case
b) Classification According to LiDAR Surface Definitions (quality):1. Engineering class-I grade LiDAR data quality, for a LiDAR surface with:
a) Nominal post spacing of 0.30 m or less
2. Engineering class-II grade LiDAR data quality, for a LiDAR surface with:
a) Nominal post spacing of 0.70 m or less
b) To have optional break lines
3. Planning class-I grade LiDAR data quality, for a LiDAR surface with:a) Nominal post spacing of 1.0 m or less
b) To have optional break lines
4. Planning class-II grade LiDAR data quality, for a LiDAR surface with:a) Nominal post spacing of 1.5 m or less
b) To have optional break lines
5. General purpose grade LiDAR data quality, for a LiDAR surface with:a) Nominal post spacing of 2.0 m or less
b) To have optional break lines
6. User defined quality, for products that do not fit into any of the previous five

www.fugro.com
Class I quality:To serve applications that requires very fine details or high resolution. The standard can
specify the ground resolution for this class of maps to be one of the following subclasses:IA: GSD= 2.5cm (1.0in.)IB: GSD= 5.0cm (2.0in.)IC: GSD= 7.5cm (3.0in.)
Class II quality: To serve applications that requires good details or high resolution. The standard can
specify the ground resolution for this class of maps to be one of the following subclasses:IIA: GSD= 10cm (4in)IIB: GSD= 12.5cm (5.0in.)IIC: GSD= 15cm (6in.).
Class III quality:To serve applications that requires acceptable details or medium resolution. The
standard can specify the ground resolution for this class of maps to be one of the following subclasses: IIIA: GSD= 20cm (8in.)IIIB: GSD= 25cm (10.0in.)IIIC: GSD= 30cm (12in.)
How Accuracy Standard should look like? The Imagery case

www.fugro.com
While geometrical quality classes for imagery-based map could look like this regardless of the resolution of the products:
Class-I Accuracy:To serve applications that require a high horizontal and vertical accuracy as specified in the following
subclasses:IA: RMSEx = RMSEy = RMSEv = 3.8 cm (1.5in.)
IB: RMSEx = RMSEy = RMSEv = 7.6cm (3in.)IC: RMSEx = RMSEy = RMSEv = 11.4cm (4.5in.)Class-II Accuracy: To serve applications that require a medium range of horizontal and vertical accuracy as specified in the
following subclasses:IIA: RMSEx = RMSEy = RMSEv = 15 cm (6in.)
IIB: RMSEx = RMSEy = RMSEv = 19cm (7.5in.)IIC: RMSEx = RMSEy = RMSEv = 22.8cm (9in.)
Class-III Accuracy:To serve applications that require a horizontal and vertical accuracy range as specified in the following
subclasses:IIIA: RMSEx = RMSEy = RMSEv = 23 cm (9in.)
IIIB: RMSEx = RMSEy = RMSEv = 38cm (15in.)IIIC: RMSEx = RMSEy = RMSEv = 46cm (18in.)
Class-IV Accuracy:To serve all other products with resolution not included in the three quality classes. Such products should
meet horizontal and vertical accuracy according to the following formula: RMSEx = RMSEy = RMSEv = 1.5 Ground Sampling Distance of the final product
How Accuracy Standard should look like? The Imagery case

www.fugro.com
Other Quality Indicators Beside 20 Check Points
Horizontal shift in seam lines in ortho photo: – How much should be acceptable?
Smear in ortho photo– How much should be acceptable?
Wavy roads in ortho photo:– How much should be acceptable?
Vertical shift between flight lines in LiDAR data– How much should be acceptable?
Noise and unfiltered data in LiDAR data:– How much should be acceptable?






























