Embed Size (px)
Citation preview

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 1/76
Zbigniew Radziszewski
Materiały do wykładu
Wstep do geometrii rózniczkowej
dla studentów specjalnosci Biomatematykastudiów I stopnia na kierunku Matematyka
Wydziału Matematyki, Fizyki i Informatyki
UMCS w Lublinie
Spis tresci
Wstep
Czesc I Wykład1. Wiadomosci wstepne.
2. Krzywe sparametryzowane i krzywe geometryczne.
3. Krzywe na płaszczyznie R2.
4. Krzywe w przestrzeni R3.
5. Powierzchnie sparametryzowane i geometryczne.
6. Pierwsza forma kwadratowa powierzchni.
7. Druga forma kwadratowa powierzchni zorientowanej.
8. Zastosowania pierwszej i drugiej formy kwadratowej powierzchni.Literatura uzupełniajaca
Czesc II Zestaw zadanCzesc III Wybrane wzory
1

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 2/76
Wstep
Geometria rózniczkowa bada własnosci obiektów geometrycznych metodami rachunku
rózniczkowego.
W niniejszym wykładzie przedstawiony zostanie podstawowy dział geometrii róznicz-kowej jakim jest lokalna teoria krzywych w R2 i w R3 oraz powierzchni w R3.
Do zrozumienia wykładu wymagana jest znajomosc podstawowych pojec i metod
rachunku rózniczkowego oraz algebry i geometrii analitycznej.
Wykład uzupełniony jest zestawem zadan oraz zestawem wybranych wzorów przydat-
nych do rozwiazywania tych zadan.
Dla zilustrowania i wizualizacji przedstawionego materiału pomocne beda nastepujace,
proste w obsłudze, ale o duzych mozliwosciach, darmowe programy komputerowe:
• GeoGebra, program dostepny na stronie http://www.geogebra.org
• 3D-XplorMath-J, program dostepny na stronie http://3d-xplormath.org
2

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 3/76
Czesc I Wykład
1. Wiadomosci wstepne.Przypomnijmy podstawowe oznaczenia, pojecia i twierdzenia z geometrii analitycznej
i z rachunku rózniczkowego, z których bedziemy korzystac.
Oznaczenia:
• Iloczyn skalarny wektorów v = (v1,...,vn) i w = (w1,...,wn) w Rn oznacza c bedziemy
symbolem v · w.
v · w =nX
i=1
viwi.
• Iloczyn wektorowy wektorów v = (v1, v2, v3) i w = (w1, w2, w3) w R3 oznacza c
bedziemy symbolem v × w. Je sli i = (1, 0, 0), j = (0, 1, 0), k = (0, 0, 1), to
v × w = ¯ i j k
v1 v2 v3
w1 w2 w3
¯ =
= i
¯¯ v2 v3
w2 w3
¯¯− j
¯¯ v1 v3
w1 w3
¯¯ + k
¯¯ v1 v2
w1 w2
¯¯ =
=
ï¯ v2 v3
w2 w3
¯¯ ,−
¯¯ v1 v3
w1 w3
¯¯ ,
¯¯ v1 v2
w1 w2
¯¯!
.
• Iloczyn mieszany wektorów v = (v1, v2, v3), w = (w1, w2, w3) i z = (z 1, z 2, z 3) w R3,
okre slony jako (v × w) · z, oznacza c bedziemy symbolem (v · w · z ) .
(v · w · z ) =
¯¯
v1 v2 v3
w1 w2 w3
z 1 z 2 z 3
¯¯ .
Definicja 1.1.
• Funkcj e postaci
f : R ⊃ I → Rn, I − przedzia ł
t → f (t) = (f 1(t),...,f n(t)) ,
gdzie f 1(t),...,f n(t) s a funkcjami rzeczywistymi jednej zmiennej, klasy C k
nazywamy funkcj a wektorow a jednej zmiennej, klasy C k.
• Pochodna funkcji wektorowej f : t → f (t) = (f 1(t),...,f n(t)) okre slona jest wzorem:
f 0(t) = (f 01(t),...,f 0n(t)) .
Twierdzenie 1.1. Iloczyn skalarny w Rn i iloczyn wektorowy w R3 funkcji wek-
torowych jednej zmiennej ró zniczkuj a si e analogicznie jak zwyk ł y iloczyn funkcji rzeczy-
wistych jednej zmiennej, tzn.
(f (t) · g(t))0 = f 0(t) · g(t) + f (t) · g0(t),
(f (t) × g(t))0 = f 0(t) × g(t) + f (t) × g0(t).
3

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 4/76
Definicja 1.2.
• Funkcj e postaci
f : R2 ⊃ D → Rn, D− obszar
(u, v) → f (u, v) = (f 1(u, v),...,f n(u, v)) ,
gdzie f 1(u, v),...,f n(u, v) s a funkcjami rzeczywistymi dwóch zmiennych , klasy C k nazy-
wamy funkcj a wektorow a dwóch zmiennych, klasy C k.
• Pochodne cz astkowe funkcji wektorowej f : (u, v) → f (u, v) = (f 1(u, v),...,f n(u, v))
okre slone s a wzorami:
f 0u(u, v) = (f 01u(u, v),...,f 0nu(u, v)) ,
f 0v(u, v) = (f 01v(u, v),...,f 0nv(u, v)) .
Twierdzenie 1.2. Pochodne cz astkowe iloczynu skalarnego w Rn i iloczynu wek-
torowego w R3 funkcji wektorowych dwóch zmiennych wyra zaj a si e analogicznie jak zwyk ł y
iloczyn funkcji rzeczywistych jednej zmiennej, tzn.
(f (u, v) · g(u, v))0u = f 0u(u, v) · g(u, v) + f (u, v) · g0u(u, v),
(f (u, v) · g(u, v))0v = f 0v(u, v) · g(u, v) + f (u, v) · g0v(u, v),
(f (u, v) × g(u, v))0u = f 0u(u, v) × g(u, v) + f (u, v) × g0u(u, v),
(f (u, v) × g(u, v))0v = f 0v(u, v) × g(u, v) + f (u, v) × g0v(u, v).
4

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 5/76
2. Krzywe sparametryzowane i krzywe geometryczne.
Najogólniejsze uzywane w matematyce okreslenie krzywej jako ciagły obraz odcinka
jest w geometrii rózniczkowej niewystarczajace, gdyz nie gwarantuje mozliwosci zas-
tosowania rachunku rózniczkowego. Ponadto, istotne jest aby odrózniac krzywa rozu-miana jako zbiór od jej opisu matematycznego za pomoca funkcji. Dlatego przyjmiemy
nastepujace definicje.
Definicja 2.1.
• Krzyw a sparametryzowan a klasy C k w Rn nazywamy funkcj e jednej zmiennej, postaci
f : R ⊃ I → Rn, I − przedzia ł otwarty
t
→f (t) = (f 1(t),...,f n(t)) , gdzie f i : I
→R s a klasy C k.
• Funkcje rzeczywiste f i nazywamy funkcjami wspó ł rz edno sciowymi krzywej sparame-
tryzowanej f.
Definicja 2.2
• Krzyw a geometryczn a klasy C k w Rn nazywamy zbiór C ⊂ Rn, który lokalnie, tzn.
w pewnym otoczeniu ka zdego swojego punktu, da si e przedstawi c jako zbór warto sci ( slad)
pewnej krzywej sparametryzowanej klasy C k.
• Ka zd a krzyw a sparametryzowan a f : t→
f (t), której obrazem jest fragment krzywej
geometrycznej C nazwiemy parametryzacj a (lokaln a) krzywej geometrycznej C.
Z powyzszych definicji wynika, ze krzywa geometryczna C mozemy sobie wyobrazac
jako droge, natomiast krzywa sparametryzowana (parametryzacje) f : t → f (t) jako opis
ruchu po tej drodze. Podczas tego ruchu, w chwili t znajdujemy sie w punkcie f (t) na
drodze C. Oczywiscie, po tej samej drodze C mozemy poruszac sie na wiele sposobów,
co oznacza, ze ta sama krzywa geometryczna C moze miec wiele róznych parametryza-
cji, albo inaczej - rózne krzywe sparametryzowane moga miec ten sam slad. Pojecia
wprowadzone w nastepnych definicjach równiez beda nawiazywały do zaproponowanejfizycznej interpretacji krzywej sparametryzowanej.
Definicja 2.3.
• Wektor pochodnej f 0 : t → f 0(t) krzywej sparametryzowanej f : t → f (t) nazwiemy
wektorem pr edko sci tej krzywej.
• D ł ugo s c wektora pr edko sci |f 0(t)| nazwiemy pr edko sci a (szybko sci a) krzywej spara-
metryzowanej f : t → f (t).
• Krzyw a sparametryzowan a f : t
→f (t) nazwiemy regularn a, je zeli w ka zdej chwili
t wektor pr edko sci jest niezerowy, tzn. f 0(t) 6= 0, (czyli pr edko s c |f 0(t)| 6= 0).
5

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 6/76
• Krzyw a geometryczn a nazwiemy krzyw a regularn a, je zeli lokalnie, tzn. w pewnym
otoczeniu ka zdego punktu, jest ona obrazem pewnej sparametryzowanej krzywej regularnej
(parametryzacji lokalnej).
• Wektor drugiej pochodnej f 00 : t → f 00(t) nazwiemy wektorem przy spieszenia krzywej
sparametryzowanej f : t → f (t).• D ł ugo s c wektora przy spieszenia |f 00(t)| nazwiemy przy spieszeniem krzywej sparame-
tryzowanej f : t → f (t).
Twierdzenie 2.1
• Wektor pr edko sci f 0(t) krzywej sparametryzowanej f : t → f (t) jest wektorem sty-
cznym w punkcie f (t) do krzywej geometrycznej C bed acej sladem f.
•• Je zeli pr edko s c krzywej sparametryzowanej f : t → f (t) jest sta ł a, tzn. |f 0(t)| =
c = const, to w ka zdej chwili t wektor przy spieszenia f 00(t) jest prostopad ł y do wektora
pr edko sci f 0(t).
Dowód: • Zgodnie z definicja pochodnej, wektor predkosci jest granicznym połoze-
niem wektorów 1h
(f (t + h) − f (t)). Wystarczy zauwazyc, ze przy h → 0 punkt f (t + h)
dazy po krzywej geometrycznej C do punktu f (t).
•• Z warunku |f 0(t)| = c mamy f 0(t) · f 0(t) = c2. Rózniczkujac te równosc stronami
otrzymujemy
f 00(t) · f 0(t) + f 0(t) · f 00(t) = 0 ⇒ 2f 00(t) · f 0(t) = 0 ⇒ f 00(t) ⊥ f 0(t). ¤
Wnioski 2.1.• Aby wyznaczy c pewien wektor styczny do regularnej krzywej gemetrycznej wystarczy
obliczy c wektor pr edko sci dowolnej regularnej parametryzacji tej krzywej.
•• Aby wyznaczy c pewien wektor prostopad ł y do regularnej krzywej geometrycznej
wystarczy obliczy c wektor przy spieszenia dowolnej regularnej parametryzacji o sta ł ej pr ed-
ko sci tej krzywej.
Definicja 2.4.
• Je zeli dwie krzywe sparametryzowane f : t → f (t) i g : τ → g(τ ) parametryzuj a
t e sam a krzyw a geometryczn a C, to funkcj e ϕ : τ
→ϕ(τ ) = t tak a, ˙ ze g(τ ) = f (ϕ(τ ))
nazwiemy zmian a parametryzacji lub reparametryzacj a krzywej geometrycznej C. Repara-
metryzacja ϕ jest funkcj a ró zniczkowaln a i monotoniczn a.
• Je zeli g(τ ) = f (ϕ(τ )) i reparametryzacja ϕ(τ ) = t jest funkcj a rosn ac a, to powiemy,
˙ ze krzywe sparametryzowane f : t → f (t) i g : τ → g(τ ) s a zgodnie zorientowane.
Je zeli reparametryzacja ϕ(τ ) = t jest funkcj a malej ac a, to krzywe sparametryzowane s a
zorientowane przeciwnie.
6

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 7/76
Z powyzszej definicji wynika, ze za pomoca parametryzacji mozemy zorientowac krzywa
geometryczna na dwa sposoby.
Stosujac wzór na pochodna funkcji złozonej mamy g0(τ ) = f 0(ϕ(τ ))ϕ0(τ ), wiec przy
zmianie parametryzacji na parametryzacje o orientacji przeciwnej, ujemny czynnik
ϕ0(τ ) < 0 spowoduje, ze wektor predkosci zmieni zwrot na przeciwny.Na analizie matematycznej wyprowadza sie wzór na długosc łuku krzywej geome-
trycznej podany w nastepujacym twierdzeniu.
Twierdzenie 2.2.
D ł ugo s c ł uku krzywej geometrycznej C o ko ncach A i B wyra za sie wzorem
d =
b
Z a
|f 0(t)| dt,
gdzie f : I → C : t → f (t) jest dowoln a parametryzacj a regularn a krzywej C tak a, ˙ ze
a, b ∈ I oraz f (a) = A i f (b) = B.
Wsród wszytkich mozliwych parametryzacji regularnej krzywej geometrycznej szczególna
role, zwłaszcza przy rozwazaniach teoretycznych, odgrywaja tzw. parametryzacje natu-
ralne, które parametryzuja krzywa za pomoca długosci łuku.
Defi
nicja 2.5.• Parametryzacj a naturaln a krzywej geometrycznej nazywamy ka zd a jej parametryzacj e
f : s → f (s) o jednostkowej pr edko sci, tzn. tak a, ˙ ze |f 0(s)| = 1 dla ka zdego s.
• Parametr s parametryzacji naturalnej nazywamy parametrem naturalnym, albo po
prostu d ł ugo sci a ł uku. [od tej chwili liter e s rezerwujemy dla parametru naturalnego krzy-
wej].
Nazwa "d ł ugo s c ł uku" dla parametru naturalnego s ma nastepujace uzasadnienie. Jesli
f : s → f (s) jest parametryzacja naturalna krzywej C , to długosc jej łuku od punktu
A = f (0) do punktu B = f (s) jest równa
sZ 0
|f 0(τ )| dτ =
sZ 0
1dτ = s.
Udowodnimy nastepujace twierdzenie, które okaze sie bardzo przydatne w rozwazniach
teoretycznych.
7

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 8/76
Twierdzenie 2.3.
Niech f : t → f (t) bedzie dowoln a parametryzacj a regularn a geometrycznej krzywej
regularnej C oraz niech
s = s(t) =
t
Z t0
|f
0
(τ )| dτ ,
gdzie t0 jest dowolnym punktem dziedziny parametryzacji f.
Wtedy s : t → s(t)
• jest funkcj a rosn ac a, a wi ec istnieje funkcja odwrotna t : s → t(s),
•• jest funkcj a ró zniczkowaln a i dsdt
= |f 0(t)| ,
• • • jest parametrem naturalnym krzywej C, tzn. g : s → f (t(s)) jest parametryzacj a
naturaln a tej krzywej .
Dowód:
• s : t → s(t) jest funkcja rosnaca jako funkcja górnej granicy całkowania funkcjinieujemnej |f 0(τ )| > 0.
•• Wynika z definicji całki.
• • • Wektor predkosci parametryzacji g : s → f (t(s)) jest jednostkowy, gdyz mamy¯dgds
¯=¯
df dt
dtds
¯=¯
df dt
¯ ¯dtds
¯= |f 0(t)| 1
|f 0(t)|= 1. ¤
Powyzsze twierdzenie gwarantuje, ze kazda regularna parametryzacje krzywej geome-
trycznej mozna zastapic parametryzacja naturalna parametryzujaca te sama krzywa,
a ponadto podaje jak to wykonac. Jest to bardzo przydatne w rozwazaniach teorety-cznych, gdyz rozpatrujac tylko parametryzacje naturalne mamy pewnosc, ze nie stracimy
ogólnosci rozwazan. Efektywne wyznaczenie parametryzacji naturalnej moze byc jednak
kłopotliwe, gdyz wymaga zarówno obliczenia całki jak i wyznaczenia funkcji odwrotnej.
Przykład 2.1.
Prosta y = x w R2 jest regularna krzywa geometryczna C, bo f : R → R2 : t → (t, t)
jest jej regularna parametryzacja. Istnieja jednak nieregularne parametryzacje krzywej
C. Np. g : R
→R2 : τ
→(τ 3, τ 3) nie jest regularna w τ = 0, bo g0(τ ) = (3τ 2, 3τ 2) i
g0(0) = (0, 0). Szybkosc |f 0(t)| = |(1, 1)| = √ 2 jest stała, natomiast szybkosc |g0(τ )| =|(3τ 2, 3τ 2)| jest zmienna i moze sie zerowac. Zauwazmy, ze jesli t = τ 3, to f (t) = g(τ ),
dlatego funkcje τ → t = t(τ ) = τ 3 nazwiemy zmiana parametru.
Skoro parametryzacja f jest regularna, to mozemy ja wykorzystac do wyznaczenia
parametryzacji naturalnej krzyej C . Mamy
s = s(t) =tR 0
|f 0(σ)| dσ =tR 0
√ 2dσ =
√ 2t, a stad t = s√
2.
Zatem parametryzacja h : R → R2 : s → h(s) = f ( s√ 2
) = ( s√ 2
, s√ 2
) jest parametryzacja
naturalna krzywej C .
8

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 9/76
Przykład 2.2.
Wykres funkcji y = |x| jest krzywa geometryczna C w R2, bo mozna go sparametry-
zowac parametryzacja f : R → R2 : t → (t, |t|). Jednak funkcja t → |t| nie ma pochodnej
w 0, zatem taka parametryzacja jest tylko klasy C 0, czyli nie jest regularna. Wiemy,
ze niezerowy wektor predkosci parametryzacji regularnej jest styczny do krzywej geome-trycznej i tym samym jednoznacznie okresla prosta styczna do tej krzywej. W przypadku
naszej krzywej C widzimy, ze nie istnieje jednoznacznie okreslona styczna w punkcie (0, 0),
zatem zadna parametryzacja krzywej C nie moze byc regularna w tym punkcie. W ten
sposób pokazalismy, ze wykres funkcji y = |x| ma punkt nieregularnosci, czyli nie jest
krzywa geometryczna regularna.
Przykład 2.3.
Okrag C : x2 + y2 = r2 na płaszczyznie R2 jest krzywa geometryczna regularna, bo po-
trafimy podac jego regularne parametryzacje. Np. parametryzacja f : t → (r cos t, r sin t),
t ∈ R, jest regularna, bo wektor predkosci jest równy f 0(t) = (−r sin t, r cos t) i szy-
bkosc |f 0(t)| = r 6= 0. Skoro predkosc jest stała, to wektor przyspieszenia f 00(t) =
(−r cos t,−r sin t) jest prostopadły do wektora predkosci f 0(t). Parametr naturalny okregu
C jest równy
s = s(t) =tR 0
|f 0(σ)| dσ =tR 0
rdσ = rt, wiec t = sr
.
Parametryzacja h : s → h(s) = f ( sr
) = (r cos sr
, r sin sr
) jest zatem parametryzacja
naturalna okregu C .
Parametryzacja f : t → (r cos t, r sin t) opisuje nastepujacy ruch po okregu C :
• w chwili t = 0 znajdujemy sie w punkcie (r, 0),
• wraz ze wzrostem t poruszamy sie w kierunku przeciwnym do ruchu wskazówek
zegara,
• szybkosc ruchu jest stała i wynosi r.
Inna parametryzacja regularna okregu C, jaka jest g : τ → (r sin2τ , r cos2τ ), τ ∈ R,
opisuje inny ruch.
•• w chwili τ = 0 znajdujemy sie w punkcie (0, r),
•• wraz ze wzrostem τ poruszamy sie w kierunku zgodnym z ruchem wskazówek zegara,•• szybkosc ruchu jest stała i wynosi 2r, bo g0(τ ) = (2r cos2τ ,−2r sin2τ ) i |g0(τ )| = 2r.
Mozna to zobaczyc wykorzystujac animacje w programie GeoGebra .
Łatwo tez sprawdzic rachunkiem, ze zmiana parametru ma postac t = π2− 2τ .
Przykład 2.4.
Cykloida nazywamy krzywa w R2, powstała jako droga ustalonego punktu okregu
toczacego sie po prostej. Wyprowadzimy parametryzacje cykloidy, jesli promien toczacego
sie okregu ma długosc r.
9

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 10/7
Cykloida
Z rysunku widac, zed−x
r= sin t, gdzie d = rt,
r−yr
= cos t.
Otrzymujemy wiec nastepujaca parametryzacje cykloidy
f : R → R2
: t → (r (t− sin t) , r (1− cos t)) .Zbadajmy jej regularnosc.
f 0(t) = (r (1− cos t) , r sin t) ,
|f 0(t)| =q
r2 (1− cos t)2 + r2 sin2 t =√
2r√
1− cos t.
Widac, ze parametryzacja nie jest regularna dla t = 2kπ. W punktach f (t), dla t = 2kπ
mamy "ostrza" cykloidy. W takich punktach nie tylko nasza parametryzacja, ale takze
zadna inna nie moze byc regularna.
Obliczmy długosc łuku cykloidy pomiedzy dwoma kolejnymi punktami nieregularnosci.
Otrzymujemy
l =2πR 0
√ 2r√
1− cos tdt =√
2r2πR 0
q 2sin2 t
2dt = 2r
2πR 0
¯sin t
2
¯dt = 2r
2πR 0
sin t2
dt = 8r.
10

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 11/7
3. Krzywe na płaszczyznie R2.
W tym rozdziale zajmiemy sie bardziej szczegółowo krzywymi sparametryzowanymi
i krzywymi geometrycznymi na płaszczyznie R2. Nie zmniejszajac ogólnosci rozwazan
załózmy, ze f : R ⊃ I → R2 : s → (x(s), y(s)) jest krzywa sparametryzowana naturalnie.Wiemy juz, ze wtedy wektor przyspieszenia f 00(s) jest prostopadły do wektora predkosci
f 0(s) w kazdej chwili s.
Definicja 3.1.
• Wektorem stycznym krzywej geometrycznej C w R2 nazywamy wektor pr edko sci
parametryzacji naturalnej f : s → f (s) krzywej C :
T (s) = f 0(s).
(Zwrot wektora T (s) zale zy od orientacji krzywej geometrycznej C okre slonej przez
parametryzacj e.)
• Wektorem krzywizny krzywej geometrycznej C w R2 nazywamy wektor przy spieszenia
parametryzacji naturalnej f : s → f (s) krzywej C :
K (s) = f 00(s).
(Zwrot wektora K (s) nie zale zy od orientacji krzywej geometrycznej C . Zawsze wskazuje
stron e, w któr a krzywa C jest zakrzywiona.)
• Wektorem normalnym krzywej geometrycznej C w R2 nazywamy unormowany wek-
tor przy spieszenia parametryzacji naturalnej f : s → f (s) krzywej C :
N (s) =f 00(s)
|f 00(s)|.
(Zwrot wektora N (s) nie zale zy od orientacji krzywej geometrycznej C. Zawsze wskazuje
on stron e, w któr a krzywa C jest zakrzywiona.)
• Reperem Freneta (lub ruchomym uk ł adem wspó ł rz ednych) krzywej geometrycznej C w
R
2
nazywamy baz e ortonormaln a z ł o˙ zon a z wektorów {T (s), N (s)} zaczepionych w punkcie f (s) krzywej C.
(Orientacja reperu Freneta {T (s), N (s)} zale zy od orientacji krzywej geometrycznej
C, bo zale zy od niej wektor T (s).)
• Krzywizn a krzywej geometrycznej C w R2 nazywamy przy spieszenie (d ł ugo s c wektora
przy spieszenia) parametryzacji naturalnej f : s → f (s) krzywej C :
k(s) = |f 00(s)| .
(Krzywizna nie przyjmuje warto sci ujemnych.)
11

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 12/7
Pochodne T 0(s) i N 0(s) musza dac sie przedstawic w bazie {T (s), N (s)}. Zachodzi
nastepujace twierdzenie.
Twierdzenie 3.1.
Wektory {T (s), N (s)} reperu Freneta krzywej w R2 sparametryzowanej parametryza-cj a naturaln a f : s → f (s) spe ł niaj a nast epuj ace równania
T (s) = f 0(s)
T 0(s) = k(s)N (s)
N 0(s) = −k(s)T (s).
Dowód: Pierwsze równanie T (s) = f 0(s) zostało podane jako definicja. Rózniczkujac
to równanie otrzymujemy T 0(s) = f 00(s) = |f 00(s)| f 00(s)|f 00(s)| = k(s)N (s), co daje równanie
drugie.
Teraz zauwazmy, ze N 0(s), jako prostopadły do N (s), musi byc postaci N 0(s) =
α(s)T (s). Aby obliczyc współczynnik α(s) mnozymy to równanie skalarnie stronami przez
T (s) i otrzymujemy α(s) = N 0(s) · T (s). Z kolei rózniczkujac równosc N (s) · T (s) = 0
otrzymamy N 0(s) · T (s) + N (s) · T 0(s) = 0, a stad α(s) = N 0(s) · T (s) = −N (s) · T 0(s) =
−N (s) · (k(s)N (s)) = −k(s). ¤
Definicja 3.2.
Równania udowodnione w Twierdzeniu 3.1. nazywamy równaniami Freneta krzywej geometrycznej C w R2 sparametryzowanej parametryzacj a naturaln a f : s → f (s).
Przykład 3.1.
Zilustrujemy podane wyzej pojecia i równania na przykładzie parametryzacji natural-
nej okregu o promieniu r i srodku (0, 0). Z Przykładu 2.3. wiemy, ze parametryzacja taka
jest f : s → f (s) = (r cos sr
, r sin sr
). Obliczamy kolejno:
• T (s) = f 0(s) = (− sin sr
, cos sr
),
f 00(s) = (−1r
cos sr
,−1r
sin sr
), wiec |f 00(s)| = 1r
, a stad
• N (s) = f 00
(s)|f 00(s)| = (− cos sr ,− sin s
r ),• k(s) = |f 00(s)| = 1
r.
Rózniczkujac otrzymane wektory T (s) i N (s) otrzymujemy
• T 0(s) = f 00(s) = (−1r
cos sr
,−1r
sin sr
) = 1r
(− cos sr
,− sin sr
) = k(s)N (s),
• N 0(s) = (1r
sin sr
,−1r
cos sr
) = −1r
(− sin sr
, cos sr
) = −k(s)T (s),
zatem równania Freneta sa spełnione.
Z powyzszego przykładu wynika wazny wniosek.
12
5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 13/7
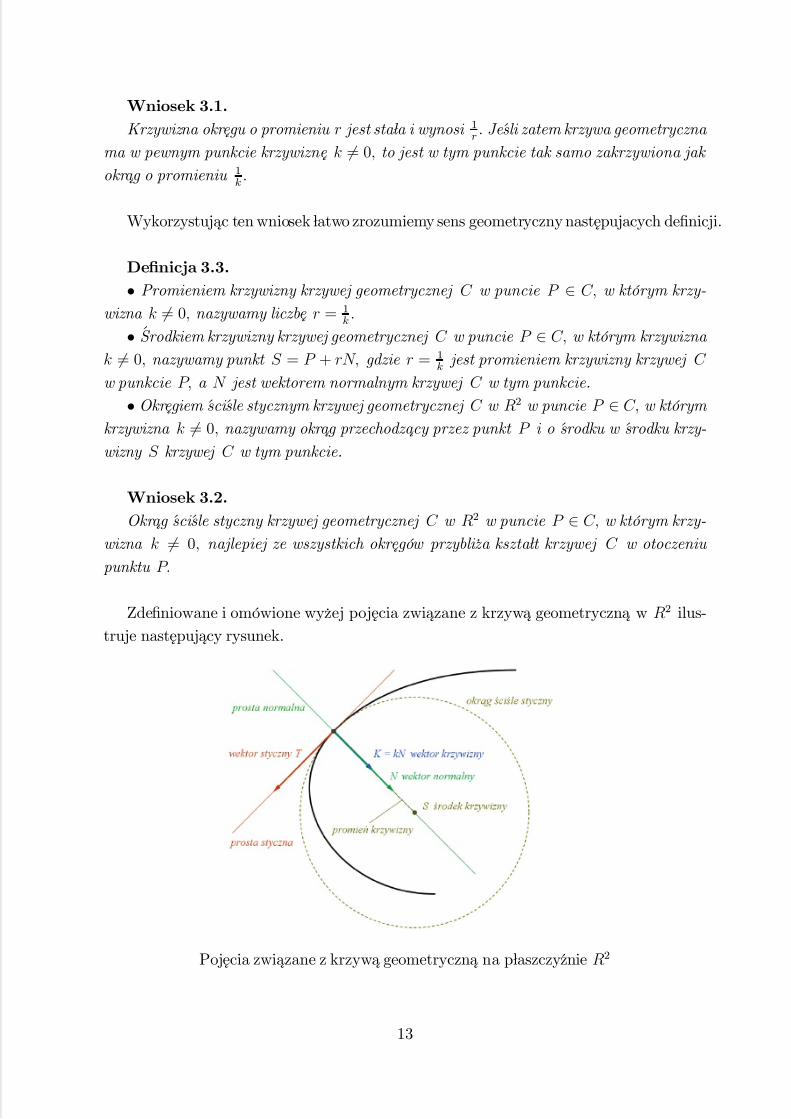
Wniosek 3.1.
Krzywizna okr egu o promieniu r jest sta ł a i wynosi 1r
. Je sli zatem krzywa geometryczna
ma w pewnym punkcie krzywizn e k 6= 0, to jest w tym punkcie tak samo zakrzywiona jak
okr ag o promieniu 1k
.
Wykorzystujac ten wniosek łatwo zrozumiemy sens geometryczny nastepujacych definicji.
Definicja 3.3.
• Promieniem krzywizny krzywej geometrycznej C w puncie P ∈ C, w którym krzy-
wizna k 6= 0, nazywamy liczbe r = 1k
.
• ´ Srodkiem krzywizny krzywej geometrycznej C w puncie P ∈ C, w którym krzywizna
k 6= 0, nazywamy punkt S = P + rN, gdzie r = 1k
jest promieniem krzywizny krzywej C
w punkcie P, a N jest wektorem normalnym krzywej C w tym punkcie.
• Okr egiem sci sle stycznym krzywej geometrycznej C w R2 w puncie P ∈ C, w którym
krzywizna k 6= 0, nazywamy okr ag przechodz acy przez punkt P i o ´ srodku w srodku krzy-
wizny S krzywej C w tym punkcie.
Wniosek 3.2.
Okr ag sci sle styczny krzywej geometrycznej C w R2 w puncie P ∈ C, w którym krzy-
wizna k 6= 0, najlepiej ze wszystkich okr egów przybli za kszta ł t krzywej C w otoczeniu
punktu P.
Zdefiniowane i omówione wyzej pojecia zwiazane z krzywa geometryczna w R2 ilus-
truje nastepujacy rysunek.
Pojecia zwiazane z krzywa geometryczna na płaszczyznie R2
13

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 14/7
Dla krzywych geometrycznych na płaszczyznie R2 zorientowanych parametryzacja
wprowadzimy teraz pojecie krzywizny zorientowanej, która moze przyjmowac zarówno
wartosci dodatnie jak i ujemne. Aby zdefiniowac krzywizne zorientowana uzyjemy funkcji
Cross : R2 → R2 : (x, y) → (−y, x), która obraca wektory o kat prosty w kierunku
przeciwnym do kieruku ruchu wskazówek zegara.Niech f : s → f (s) bedzie parametryzacja naturalna orientujaca krzywa geometryczna
C na płaszczyznie R2.
Definicja 3.4.
• Zorientowanym wektorem normalnym krzywej geometrycznej C zorientowanej para-
metryzacj a naturaln a f : s → f (s) nazywamy wektor
N z(s) = Cross(f 0(s)).
• Zorientowanym reperem Freneta krzywej geometrycznej C zorientowanej parame-
tryzacj a naturaln a f : s → f (s) nazywamy baz e ortonormaln a z ł o˙ zon a z wektorów
{T (s), N z(s)} zaczepionych w punkcie f (s) krzywej C.
• Krzywizn a zorientowan a krzywej geometrycznej C zorientowanej parametryzacj a
naturaln a f : s → f (s) nazywamy funkcj e
kz(s) = f 00(s) · Cross(f 0(s)) = f 00(s) · N z(s).
(jest to opatrzona znakiem d ł ugo s c prostopad ł ego rzutu wektora przy spieszenia f
00
(s)na zorientowany wektor normalny N z(s).)
Wniosek 3.3.
Zorientowany wektor normalny N z(s) pokrywa si e z wektorem normalnym N (s), gdy
wraz ze wzrostem parametru s krzywa "skr eca w lewo" (tzn. w kierunku przeciwnym do
ruchu wskazówek zegara) i wtedy kz = f 00(s) · N z(s) = f 00(s) · N (s) = |f 00(s)| = k(s),
natomiast N z(s) = −N (s), gdy krzywa "skr eca w prawo" (tzn. w kierunku zgodnym z
ruchem wskazówek zegara) i wtedy kz(s) =
−k(s). Krzywizna zorientowana okre sla wi ec
nie tylko jak mocno, ale równiez w któr a stron e "skr eca" krzywa geometryczna, gdy wzd ł u z niej przesuwamy si e zgodnie z orientacj a okre slon a przez parametryzacj e.
Twierdzenie 3.2.
• Krzywizna zorientowana krzywej geometrycznej w R2 zorientowanej parametryzacj a
naturaln a f : s → f (s) = (x(s), y(s)) wyra za si e wzorem
kz(s) = x0(s)y00(s)− x00(s)y0(s).
14

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 15/7
•• Krzywizna zorientowana krzywej geometrycznej w R2 zorientowanej dowoln a para-
metryzacj a f : t → f (t) = (x(t), y(t)) wyra za si e wzorem
kz(t) =f 00(t) · Cross(f 0(t))
|f 0(t)|3=
x0(t)y00(t)− x00(t)y0(t)
¡(x0
(t))
2
+ (y0
(t))
2¢ 3
2
.
Dowód:
• W parametryzacji naturalnej mamy
kz(s) = f 00(s) · Cross(f 0(s)) = (x00(s), y00(s)) · (−y0(s), x0(s)) = x0(s)y00(s)− x00(s)y0(s).
•• Dowolna parametryzacje t → f (t) zastepujemy parametryzacja naturalna
s → f (t(s)) i w niej obliczamy krzywizne zorientowana z definicji. Kolejno mamy
f 0(s) = df dt
dtds
= f 0(t) dtds
,
f 00(s) =
³d2f dt2
dtds
´dtds
+ df dt
d2tds2
= f 00(t)
¡dtds
¢2
+ f 0(t) d2tds2
.
kz(t) = kz(t(s)) = kz(s) = f
00
(s) · Cross(f
0
(s)) ==³
f 00(t)¡ dt
ds
¢2+ f 0(t) d2t
ds2´
· Cross(f 0(t) dtds
) =
= f 00(t)¡
dtds
¢2· Cross(f 0(t) dt
ds) + f 0(t) d2t
ds2· Cross(f 0(t) dt
ds) =
=¡
dtds
¢3(f 00(t) · Cross(f 0(t))) + 0 =
= f 00(t)·Cross(f 0(t))
(ds
dt)3 = f 00(t)·Cross(f 0(t))
|f 0(t)|3. ¤
Wniosek 3.4.
Wzór na krzywizn e zorientowan a kz(t) w dowolnej parametryzacji, podany w powy zszym
twierdzeniu, mo˙ zna wykorzystywa c do obliczania zwyk ł ej krzywizny k(t) w dowolnej para-metryzacji, pami etaj ac, ˙ ze k(t) = |kz(t)| .
Przykład 3.2.
Obliczymy krzywizne zorientowana okregu C : x2 + y2 = r2 zorientowanego najpierw
parametryzacja f (t) = (r cos t, r sin t), a nastepnie parametryzacja zorientowana do niej
przeciwnie g(τ ) = (r cos(−τ ), r sin(−τ )) = (r cos τ ,−r sin τ ). Obie parametryzacje nie sa
naturalne, wiec nalezy zastosowac drugi wzór na krzywizne zorientowana.
W pierwszym przypadku otrzymamy:
f 0(t) = (−r sin t, r cos t), |f 0(t)| = r,
Cross(f 0(t)) = (−r cos t,−r sin t),
f 00(t) = (−r cos t,−r sin t),
wiec
kzf (t) = r2 cos2 t+r2 sin2 tr3
= 1r
.
W przypadku drugiej parametryzacji mamy:
g0(τ ) = (−r sin τ ,−r cos τ ), |g0(τ )| = r,
Cross(g0(τ )) = (r cos τ ,−r sin τ ),
g
00
(τ ) = (−r cos τ , r sin τ ),
15

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 16/7
zatem
kzg(τ ) = −r2 cos2 τ −r2 sin2 τ r3
= −1r
.
Bez wzgledu na wybór parametryzacji mamy k(t) = |kzf (t)| = 1r
= |kzg(τ )| .
Uzywajac animacji w programie GeoGebra mozemy sprawdzic, ze w parametryzacji f
poruszamy sie po okregu w kierunku przeciwnym do ruchu wskazówek zegara, natomiastw parametryzacji g w kierunku zgodnym z ruchem wskazówek zegara.
W bardziej zaawansowanych kursach geometrii rózniczkowej pokazuje sie, ze krzy-
wizna zorientowana jest najistotniejsza własnoscia krzywej geometrycznej sparametry-
zowanej naturalnie na płaszczyznie R2, gdyz jednoznacznie okresla jej kształt. Mówi o
tym nastepujace twierdzenie.
Twierdzenie 3.3.
Niech C 1 i C 2 bed a krzywymi geometrycznymi, które mo˙ zna sparametryzowa c natu-
ralnie na tym samym przedziale I oraz niech kz1 i kz2 bed a odpowiednio krzywiznami
zorientowanymi tych krzywych okre slonymi na przedziale I . Krzyw a geometryczn a C 1
mo zna na ł o˙ zy c stosuj ac obrót i przesuni ecie na krzyw a geometryczn a C 2 wtedy i tylko
wtedy, gdy kzf = kzg.
Wyprowadzono nawet wzór, który "odtwarza" parametryzacje naturalna krzywej geom-
etrycznej na podstawie podanej krzywizny zorientowanej z dokładnoscia do połozenia na
płaszczyznie R2.
Zajmiemy sie teraz sposobami okreslenia krzywych geometrycznych w R2 innymi niz
poprzez parametryzacje.
Wiemy, ze wykres funkcji rzeczywistej ciagłej, okreslonej na przedziale ϕ : (a, b) →R : x → ϕ(x) jest linia ciagła. Zbadamy kiedy ta linia jest krzywa geometryczna w sensie
naszej definicji. Wprowadzmy w tym celu typowa dla wykresów funkcji parametryzacje
f : (a, b) → R2 : t → f (t) = (t, ϕ(t)).
Warunkiem na to, zeby taka parametryzacja była klasy C k jest by funkcja ϕ była tej
klasy. Wektor predkosci parametryzacji f jest równy f 0(t) = (1, ϕ0(t)) 6= (0, 0), zatem
otrzymujemy wniosek.
Wniosek 3.5.
Wykres funkcji ró zniczkowalnej ϕ : (a, b) → R : x → ϕ(x) klasy C r jest zawsze krzyw a
geometryczn a regularn a klasy C r.
16

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 17/7
Innyn sposobem okreslania krzywych geometrycznych w R2 jest stosowanie tzw. rów-
nan ogólnych. Sposobu tego juz wczesniej uzylismy zapisujac równanie okregu w postaci
C : x2 + y2 = r2. Udowonimy nastepujace twierdzenie.
Twierdzenie 3.4.Niech F : R2 ⊃ U → R : (x, y) → F (x, y) bedzie funkcj a klasy C r, okre slon a na zbiorze
otwartym U oraz niech zbiór C punktów (x, y) w U spa ł niaj acych równanie F (x, y) = 0
bedzie niepusty i grad F (x0, y0) :=¡
F 0x(x0, y0), F 0y(x0, y0)¢
6= (0, 0), dla ka zdego
(x0, y0) ∈ C. Wtedy zbiór C jest krzyw a geometryczn a klasy C r.
Dowód: Niech F (x0, y0) = 0 i F 0y(x0, y0) 6= 0. Wtedy, na podstawie twierdzenia
o funkcji uwikłanej, zbiór C w otoczeniu punktu (x0, y0) mozna przedstawic w postaci
y = ϕ(x), gdzie ϕ(x) jest funkcja klasy C r, a jak wczesniej pokazalismy, wykres funkcji
ϕ jest krzywa klasy C r. Jezeli F 0x(x0, y0) 6= 0, to zbiór C, w otoczeniu punktu (x0, y0),
mozna przedstawic w postaci funkcji x = ψ(y). ¤
Przykłady 3.3.
• Zastosujemy powyzsze twierdzenie aby potwierdzic, ze okrag C okreslony równaniem
x2+y2 = r2 rzeczywiscie jest krzywa geometryczna. Wezmy funkcje F (x, y) = x2+y2−r2,
dla której C jest zbiorem rozwiazan równania F (x, y) = 0. Od razu widzimy, ze gradient
grad F (x, y) = (2x, 2y) nie zeruje sie nigdzie w punktach C, wiec C jest krzywa regularna.
Jesli x0 6= 0, to F 0x(x0, y0) = 2x0 6= 0 i w otoczeniu punktu (x0, y0) równanie moznarozwikłac do postaci x = ϕ1(y) =
p r2 − y2, gdy x0 > 0, albo x = ϕ2(y) = −
p r2 − y2,
gdy x0 < 0. Jesli natomiast y0 6= 0, to F 0y(x0, y0) = 2y0 6= 0 i w otoczeniu punktu
(x0, y0) równanie mozna rozwikłac do postaci y = ψ1(x) =√
r2 − x2, gdy y0 > 0, albo
y = ψ2(x) = −√
r2 − x2, gdy y0 < 0.
• Zbadajmy zbiór D okreslony równaniem x2 − y2 = 0, czyli (x − y)(x + y) = 0.
Jest to równanie pary prostych przecinajacych sie w punkcie (0, 0). Tym razem bierzemy
funkcje F (x, y) = x2 − y2 i okazuje sie, ze grad F (x, y) = (2x,−2y) zeruje sie w puncie
(0, 0) nalezacym do D. Zatem D nie jest regularna krzywa geometryczna. Powodem jest
"skrzyzowanie" prostych w (0, 0). W tym punkcie nie potrafimy jednoznacznie okreslic
prostej stycznej, a tym samym wektora prostopadłego do zbioru D.
Twierdzenie 3.5.
• Wektor grad F (x0, y0) =¡
F 0x(x0, y0), F 0y(x0, y0)¢
jest w punkcie (x0, y0) ∈ C prostopa-
d ł y do krzywej geometrycznej C : F (x, y) = 0.
•• Styczna do krzywej C w punkcie (x0, y0) ∈ C ma równanie
[F 0x(x0, y0)] (x−
x0) + £F 0y(x0, y0)¤ (y−
y0) = 0.
17

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 18/7
Dowód:
• Niech f : t → f (t) = (x(t), y(t)) bedzie lokalna parametryzacja krzywej C w otocze-
niu punktu f (t0) = (x(t0), y(t0)) = (x0, y0). Mamy zatem F (x(t), y(t)) = 0. Rózniczkujac
to równanie wzgledem t otrzymamy
[F 0x(x0, y0)] x0(t0) +£
F 0y(x0, y0)¤
y0(t0) = 0.
Widzimy, ze iloczyn skalarny gradientu grad F (x0, y0) i wektora predkosci
f 0(t0) = (x0(t0), y0(t0)) zeruje sie, wiec wektory te sa do siebie prostopadłe.
•• Skoro mamy juz wektor prostopadły do stycznej, to postac jej równania jest oczywista. ¤
Na zakonczenie rozdziału dotyczacego krzywych na płaszczyznie R2 przedstawimy za-
gadnienie jednoparametrowych rodzin krzywych.
Definicja 3.5.
Zbiór krzywych {C t} , t ∈ I, okre slonych równaniami C t0 : F (x,y,t0) = 0, gdzie
F : R3 ⊃ U → R : (x,y,t) → F (x,y,t), jest funkcj a klasy C 1, nazywamy jednopara-
metrow a rodzin a krzywych w R2 sparametryzowan a parametrem t ∈ I.
Przykłady 3.4.
Równanie F (x,y,t) = (x − t)2 + y2 − 1 = 0, t ∈ R przedstawia jednoparametrowa
rodzine okregów {C t} , t ∈ R, o srodkach S t = (t, 0) i promieniu 1. Zauwazm, ze prostey = 1 i y = −1 składaja sie z punktów ich stycznosci do kazdego okregu tej rodziny.
Definicja 3.6.
Krzyw a geometryczn a D nazwiemy obwiedni a jednoparametrowej rodziny krzywych
{C t} , t ∈ I, je zeli ka zdy punkt krzywej D jest punktem jej styczno sci z przynajmniej
jedn a z krzywych tej rodziny.
Twierdzenie 3.6.
Je sli istnieje obwiednia D jednoparametrowej rodziny krzywych danej równaniem
F (x,y,t) = 0, to jej punkty spe ł niaj a uk ł ad równa n (F (x,y,t) = 0
F 0t (x,y,t) = 0
Dowód: Niech C t i C t+h beda dwiema krzywymi jednoparametrowej rodziny krzywych
okreslonej równaniem F (x,y,t) = 0. Wspólne punkty tych krzywych (o ile istnieja !)
spełniaja układ równan
( F (x,y,t) = 0
F (x,y,t + h) = 0
18

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 19/7
Układ ten jest równowazny układowi(F (x,y,t) = 0
F (x,y,t+h)−F (x,y,t)h
= 0
Jesli obwiednia D istnieje (!), to przy h → 0 wspólne punkty krzywych C t i C t+h daza do
punktów obwiedni lezacych na C t, a wiec punkty obwiedni spełniaja układ równan(F (x,y,t) = 0
F 0t (x,y,t) = 0¤
Przykłady 3.4.
• W przypadku jednoparametrowej rodziny krzywych F (x,y,t) = (x−t)2+y2−1 = 0,
t ∈ R, z poprzedniego przykładu, bez trudu odgalismy, ze obwiednia istnieje i składa siez dwóch prostych D = { p : y = 1, q : y = −1} . Teraz uzyskamy te obwiednie za pomoca
rachunku. Obliczamy F 0t (x,y,t) = −2(x− t), a nastepnie z układu równan((x− t)2 + y2 − 1 = 0
−2(x− t) = 0
rugujemy parametr t. Z drugiego równania mamy t = x i podstawiajac do równania
pierwszego otrzymamy y2 − 1 = 0. Jest to, jak widac, równanie odgadnietej wczesniej
pary prostych.
• Spróbujmy znalezc obwiednie jednoparametrowej rodziny krzywych F (x,y,t) = x2+
y2 − t2 − 1 = 0, t ∈ R. Jest to rodzina okregów o wspólnym srodku (0, 0) i promieniach√ t2 + 1. Obliczamy F 0t (x,y,t) = −2t i rugujemy t z układu równan(
x2 + y2 − t2 − 1 = 0
−2t = 0
Otrzymamy równanie okregu x2 + y2 = 1, ale od razu widzimy, ze nie jest to obwiednia
rozwazanej rodziny okregów. Taka rodzina okregów nie ma obwiedni bo okregi C t i
C t+h przy h 6= 0 nigdy sie nie przecinaja (w dowodzie twierdzenia zakładalismy istnieniepunktów wspólnych C t i C t+h).
Wniosek 3.6.
Obwiednia jednoparametrowej rodziny krzywych nie musi istnie c. Powy zsze twierdzenie
nie rozstrzyga czy obwiednia istnieje. Wyrugowanie parametru t nie oznacza, ˙ ze obwiednia
istnieje i ˙ ze otrzymali smy jej równanie, dlatego bł edem jest nazywanie podanego uk ł adu
równa n równaniami obwiedni
19

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 20/7
4. Krzywe w przestrzeni R3.
Zajmiemy sie teraz bardziej szczegółowo badaniem krzywych sparametryzowanych i
krzywych geometrycznych w przestrzeni R3. Czesc pojec wprowadzonych dla krzywych
w R2 okaze sie nadal aktualna. Wiemy, ze nie zmniejszajac ogólnosci rozwazan mozemyograniczyc sie najpierw do krzywych sparametryzowanych naturalnie f : R ⊃ I → R3 :
s → (x(s), y(s), z (t)), gdzie s jest parametrem naturalnym i wtedy wektor przyspieszenia
f 00(s) jest prostopadły do wektora predkosci f 0(s) w kazdej chwili s.
Definicja 4.1.
• Wektorem stycznym krzywej geometrycznej C w R3 nazywamy wektor pr edko sci
parametryzacji naturalnej f : s → f (s) krzywej C :
T (s) = f 0(s).
(Zwrot wektora T (s) zale zy od orientacji krzywej geometrycznej C okre slonej przez
parametryzacj e.)
• Wektorem krzywizny krzywej geometrycznej C w R3 nazywamy wektor przy spieszenia
parametryzacji naturalnej f : s → f (s) krzywej C :
K (s) = f 00(s).
(Zwrot wektora krzywizny K (s) nie zale zy od orientacji krzywej geometrycznej C okre slonej przez parametryzacj e.)
• Wektorem normalnym krzywej geometrycznej C w R3 nazywamy unormowany wek-
tor przy spieszenia parametryzacji naturalnej f : s → f (s) krzywej C :
N (s) =f 00(s)
|f 00(s)|.
(Zwrot wektora N (s) nie zale zy od orientacji krzywej geometrycznej C okre slonej przez
parametryzacj e.)
• Wektorem binormalnym krzywej geometrycznej C w R3 nazywamy wektor
B(s) = T (s) × N (s).
(Zwrot wektora B(s) zale zy od orientacji krzywej geometrycznej C okre slonej przez
parametryzacj e.)
• Reperem Freneta krzywej geometrycznej C w R3 nazywamy baz e ortonormaln a
z ł o˙ zon a z wektorów {T (s), N (s), B(s)} zaczepionych w punkcie f (s) krzywej C.
(Orientacja reperu Freneta {T (s), N (s), B(s)} nie zale zy od orientacji krzywej geom-
etrycznej C, bo przy zmianie orientacji zwrot zmieniaj a jednocze snie T (s) i B(s).)
20

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 21/7
• Prost a przechodz ac a przez punkt f (s) i
- równoleg ł a do wektora T (s) nazywamy prost a styczn a krzywej w punkcie f (s),
- równoleg ł a do wektora N (s) nazywamy prost a normaln a g ł ówn a krzywej w punkcie
f (s),
- równoleg ł a do wektora B(s) nazywamy prost a binormaln a krzywej w punkcie f (s).• P ł aszczyzn e przechodz ac a przez punkt f (s) i
- rozpiet a przez wektory T (s) i N (s) nazywamy pł aszczyzn a styczn a krzywej w punkcie
f (s),
- rozpiet a przez wektory N (s) i B(s) nazywamy pł aszczyzn a normaln a krzywej w
punkcie f (s),
- rozpiet a przez wektory T (s) i B(s) nazywamy pł aszczyzn a prostuj ac a krzywej w
punkcie f (s).
• Krzywizn a krzywej geometrycznej C w R3 nazywamy przy spieszenie (d ł ugo s c wektora
przy spieszenia) parametryzacji naturalnej f : s → f (s) krzywej C :
k(s) = |f 00(s)| .
Istonie nowym pojeciem, które nie pojawiło sie dla krzywych w R2 jest skrecenie
krzywej w R3, które teraz zdefiniujemy.
Obliczmy pochodna wektora binormalnego B(s) = T (s) × N (s). Wektor B0(s) jest
prostopadły do wektora jednostkowego B(s), ale równiez mamy B0(s) = (T (s) × N (s))0 =
T 0(s)×N (s)+T (s)×N 0(s) = 0+ T (s)×N 0(s) = T (s)×N 0(s), wiec B0(s) jest prostopadły
takze do T (s). Wynika stad, ze B0(s) jest równoległy do N (s) i mozemy go zapisac w
postaci
B0(s) = τ (s)N (s)
dla pewnej funkcji τ : s → τ (s).
Definicja 4.2.
Skr eceniem krzywej geometrycznej C sparametryzowanej parametryzacj a naturaln a nazy-
wamy funkcj e τ : s → τ (s) tak a, ˙ ze B0(s) = τ (s)N (s). Skr ecenie nie jest okre slone w punktach krzywej, w których krzywizna zeruje si e, bo wtedy nie s a okre slone wektory N (s)
ani B(s).
Nastepujace twierdzenie podaje interpretacje geometryczna skrecenia jako miary pred-
kosci odchylania sie krzywej od płaszczyzny stycznej, czyli miary "przestrzennosci" krzy-
wej.
21

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 22/7
Twierdzenie 4.1.
Krzywa o niezeruj acej si e krzywi znie jest krzyw a pł ask a (zawiera si e w pł aszczy znie)
wtedy i tylko wtedy, gdy jej skr ecenie jest sta ł e i równe 0.
Dowód:Jesli krzywa jest płaska, to zawiera sie w swojej stałej płaszczyznie stycznej (do tego
potrzebne jest załozenie k(s) 6= 0 ), zatem wektor B(s) jest stały. W konsekwencji
B0(s) jest wektorem zerowym i τ (s) = 0. Na odwrót, jesli τ (s) = 0, to B(s) = B0 jest
stały i mamy (f (s) · B0)0 = f 0(s) · B0 = T (s) · B(s) = 0, wiec f (s) · B0 = const. Oznacza
to, ze wszystkie punkty f (s) leza w płaszczyznie prostopadłej do B0. ¤
Udowodnimy nastepujace twierdzenie dotyczace reperu Freneta {T (s), N (s), B(s)}
krzywej w R3.
Twierdzenie 4.2.
Wektory {T (s), N (s), B(s)} reperu Freneta krzywej w R3 sparametryzowanej parame-
tryzacj a naturaln a f : s → f (s) spe ł niaj a nast epuj ace równania
T (s) = f 0(s)
T 0(s) = k(s)N (s)
N 0(s) = −k(s)T (s)− τ (s)B(s)
B0(s) = τ (s)N (s)
Dowód:
Pierwsze równanie T (s) = f 0(s) zostało podane jako definicja. Rózniczkujac to rów-
nanie dostaniemy T 0(s) = f 00(s) = |f 00(s)| f 00(s)|f 00(s)|
= k(s)N (s), co daje równanie drugie.
Równanie czwarte uzasadnilismy przy definiowaniu skrecenia τ (s).
Aby wyprowadzic równanie trzecie zrózniczkujmy wektor N (s) = B(s)×T (s) . Otrzy-
mamy N 0(s) = B0(s) × T (s) + B(s) × T 0(s) = τ (s)N (s) × T (s) + k(s)B(s) × N (s) =
−τ (s)B(s)
−k(s)T (s). ¤
Definicja 4.3.
Równania podane w Twierdzeniu 4.2 nazywamy równaniami Freneta krzywej geome-
trycznej C w R3 sparametryzowanej parametryzacj a naturaln a f : s → f (s).
Skrecenie zostało zdefiniowane jako współczynnik proporcjonalnosci miedzy wektorami
B0(s) i N (s). Pokazemy jak obliczyc skrecenie bezposrednio z parametryzacji naturalnej.
22

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 23/7
Twierdzenie 4.3.
Skr ecenie krzywej geometrycznej C w R3 sparametryzowanej parametryzacj a naturaln a
f : s → f (s) wyra za si e wzorem
τ (s) = −(f 0(s) · f 00(s) · f 000(s))
k2(s) .
Dowód: Wykorzystujac równania Freneta obliczmy kolejne pochodne parametryza-
cji naturalnej f : s → f (s), (opuszczamy argument s dla lepszej czytelnosci zapisu).
Otrzymamy
f 0 = T,
f 00 = kN,
f 000 = k0N + kN 0 = k0N + k (−kT − τ B) = −k2T + k0N − kτB.
Nastepnie obliczmy iloczyn mieszany
(f 0 · f 00 · f 000) = (T · kN · (−k2T + k0N − kτ B)) =
= (T × kN ) · (−k2T + k0N − kτ B) =
= kB · (−k2T + k0N − kτ B) = −k2τ .
Stad juz wynika nasz wzór na skrecenie. ¤
Podobnie jak dla krzywych w R2 definiujemy promien i srodek krzywizny krzywej oraz
okrag scisle styczny.
Definicja 4.4.• Promieniem krzywizny krzywej geometrycznej C w R3 w puncie P ∈ C, w którym
krzywizna k 6= 0, nazywamy liczbe r = 1k
.
• ´ Srodkiem krzywizny krzywej geometrycznej C w R3 w puncie P ∈ C, w którym
krzywizna k 6= 0, nazywamy punkt S = P + rN, gdzie r = 1k
jest promieniem krzywizny
krzywej C w punkcie P, a N jest wektorem normalnym krzywej C w tym punkcie.
• Okr egiem sci sle stycznym krzywej geometrycznej C w R3 w puncie P ∈ C, w którym
krzywizna k 6= 0, nazywamy okr ag le z acy w pł aszczy znie ´ sci sle stycznej w punkcie P,
przechodz acy przez punkt P i o ´ srodku w srodku krzywizny S krzywej C w tym punkcie.
Podsumowujac rozwazania dotyczace krzywych geometrycznych w R3 sparametry-
zowanych naturalnie podamy (bez dowodu) twierdzenie, które mówi, ze krzywizna i
skrecenie, jako funkcje długosci łuku krzywej w R3, jednoznacznie okreslaja jej ksz-
tałt, analogicznie jak krzywizna zorientowana jednoznacznie okreslała kształt krzywej na
płaszczyznie R2.
23

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 24/7
Pojecia zwiazane z krzywa geometryczna w przestrzeni R3
Twierdzenie 4.4. (Podstawowe twierdzenie lokalnej teorii krzywych).
Dla danych dwóch funkcji ró zniczkowalnych: k : I → R : s → k(s) o warto sciach
dodatnich i τ : I → R : s → τ (s), okre slonych na tym samym przedziale I, istnieje krzywa
geometryczna C w R3 sparametryzowana naturalnie f : I → R3 : s → f (s), dla której
s jest d ł ugo sci a ł uku (tzn. parametrem naturalnym), k jest krzywizn a, a τ skr eceniem.
Co wi ecej, ka zda inna krzywa
eC spe ł niaj aca podane warunki da si e na ł o˙ zy c na krzyw a C,
poprzez pewien obrót i przesuni ecie.
Wniosek 4.1.
Krzyw a regularn a w R3 mo zna sobie wyobra za c jako prost a, która zosta ł a zakrzywiona
(ale nie za ł amana) w stopniu jednoznacznie okre slonym przez krzywizn e k(s) i przestrzen-
nie skr econa w stopniu jednoznacznie okre slonym przez skr ecenie τ (s).
We wszystkich dotychczasowych rozwazaniach teoretycznych dotyczacych krzywych
regularnych w R3 zakładalismy, ze posługujemy sie parametryzacja naturalna krzywej
f : s → f (s), Załozenie takie było bardzo przydatne i nie zawezało dziedziny rozwazan,ze wzgledu na teoretyczna mozliwosc zastapienia kazdej parametryzacji regularnej para-
metryzacja naturalna. W praktyce bardzo rzadko mamy dana krzywa w parametryzacji
naturalnej, a zmiana parametryzacji dowolnej na naturalna moze byc trudna lub wrecz
niemozliwa, ze wzgledu na koniecznosc efektywnego obliczenia całki i funkcji odwrot-
nej. Dlatego, podobnie jak dla krzywych na płaszczyznie R2, warto miec do dyspozycji
znane juz wzory, ale w parametryzacji dowolnej. Wyprowadzimy kilka takich najbardziej
potrzebnych wzorów.
24

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 25/7
Okreslimy wektory {T (t), N (t), B(t)} reperu Freneta w dowolnej parametryzacji reg-
ularnej f : t → f (t).
• Wektor predkosci f 0(t) jest niezerowy, ale jego długosc moze byc dowolna, zatem aby
otrzymac jednostkowy wektor styczny nalezy unormowac f 0(t). Stad T (t) = f 0(t)|f 0(t)|
.
• Wektor przyspieszenia f 00(t) nie musi byc prostopadły do wektora predkosci f 0(t),ale zawsze wektor binormalny B(t) jest prostopadły do obu tych wektorów. Zatem, jesli
tylko f 00(t) nie jest równoległy do f 0(t), to B(t) = f 0(t)×f 00(t)|f 0(t)×f 00(t)| .
• Na koniec N (t) = B(t) × T (t) (taka powinna byc kolejnosc mnozonych wektorów ze
wzgledu na orientacje!).
Wykazalismy w ten sposób nastepujace twierdzenie.
Twierdzenie 4.5.
Wektory {T (t), N (t), B(t)} reperu Freneta w dowolnej parametryzacji regularnej f :
t → f (t) wyra zaj a si e wzorami
T (t) =f 0(t)
|f 0(t)|
B(t) =f 0(t) × f 00(t)
|f 0(t) × f 00(t)|
N (t) = B(t) × T (t).
Wyprowadzimy teraz wzory na krzywizne i skrecenie krzywej w dowolnej parametryza-
cji regularnej f : t → f (t).
Twierdzenie 4.6.
Krzywizna i skr ecenie krzywej geometrycznej C w R3 w dowolnej parametryzacji re-
gularnej f : t → f (t) wyra zaj a si e wzorami
k(t) =|f 0(t) × f 00(t)|
|f 0(t)|3,
τ (t) = −(f 0(t) · f 00(t) · f 000(t))
|f 0(t) × f 00(t)|2.
Dowód: Niech krzywa geometryczna C w R3 sparametryzowana bedzie dowolna para-
metryzacja regularna f : t → f (t) oraz niech s = s(t) bedzie reparametryzacja taka, ze
f : t → f (t) = g(s(t)), gdzie g : s → g(s) jest parametryzacja naturalna. Obliczmy kolejne
pochodne parametryzacji f.wzgledem t, uwzgledniajac od razu, ze s = s(t). Otrzymamy
• f 0(t) = dgds
dsdt
= T (t) |f 0(t)| ,
•• f 00(t) = d2gds2 ¡ds
dt¢2
+ dgds
d2sdt2
= T 0(t) |f 0(t)|2 + T (t) d2sdt2
,
• • • f 000(t) = d3gds3¡ds
dt¢3 + d2g
ds22 ds
dtd2sdt2
+ d2gds2
dsdt
d2sdt2
+ dgds
d3sdt3
=
25

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 26/7
= T 00(t) |f 0(t)|3 + 3T 0(t) |f 0(t)| d2sdt2
+ T (t) d3sdt3
,
gdzie
T 0(t) = k(t)N (t)
oraz
T 00(t) = (k(t)N (t))0 = k0(t)N (t) + k(t)N 0(t) == k0(t)N (t) + k(t) (−k(t)T (t)− τ (t)B(t)) =
= k0(t)N (t)− k2(t)T (t)− k(t)τ (t)B(t).
Obliczmy iloczyn wektorowy
f 0(t) × f 00(t) = (T (t) |f 0(t)|) ׳
T 0(t) |f 0(t)|2 + T (t) d2sdt2
´=
= |f 0(t)|3 T (t) × T 0(t) = |f 0(t)|3 T (t) × k(t)N (t) = k(t) |f 0(t)|3 B(t),
zatem
|f 0(t) × f 00(t)| = k(t) |f 0(t)|3 ,
sk˛
ad otrzymujemy nasz wzór na krzywizn˛e.Obliczmy teraz iloczyn mieszany (f 0(t) · f 00(t) · f 000(t)) opuszczajac od razu składniki
zerowe.
(f 0(t) · f 00(t) · f 000(t)) = (f 0(t) × f 00(t)) · f 000(t) =
= k(t) |f 0(t)|3 B(t) ·¡−k(t)τ (t) |f 0(t)|3 B(t)
¢= −k2(t)τ (t) |f 0(t)|6 .
Stad
τ (t) = − (f 0(t)·f 00(t)·f 000(t))
k2(t)|f 0(t)|6= − (f 0(t)·f 00(t)·f 000(t))
|f 0(t)|6|f 0(t)|6
|f 0(t)×f 00(t)|2= − (f 0(t)·f 00(t)·f 000(t))
|f 0(t)×f 00(t)|2,
czyli otrzymalismy nasz wzór na skrecenie. ¤
Na zakonczenie pokazemy, ze równania Freneta krzywej w dowolnej parametryzacjiregularnej niewiele róznia sie od równan Freneta krzywej w parametryzacji naturalnej.
Twierdzenie 4.7.
Równania Freneta krzywej w dowolnej parametryzacji regularnej f : t → f (t) maj a
posta c
T (t) =f 0(t)
|f 0(t)|
T 0
(t) = |f 0
(t)| k(t)N (t)N 0(t) = |f 0(t)| (−k(t)T (t)− τ (t)B(t))
B0(t) = |f 0(t)| τ (t)N (t)
Dowód:
Pierwsze równanie T (t) = f 0(t)|f 0(t)|
zostało podane jako definicja. Pozostałe równania
otrzymujemy natychmiast z analogicznych równan Freneta dla krzywej w parametryzacji
naturalnej uwzgledniajac, ze dsdt
= |f 0(t)| . ¤
26

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 27/7
Przykład 4.4.
Zilustrujemy wprowadzone pojecia i zastosujemy wyprowadzone wzory dla krzywych
w R3, na przykładzie klasycznej krzywej zwanej linia srubowa albo helisa. Linia srubowa
powstaje jako droga, po której porusza sie punkt obracajac sie dookoła osi Oz w odległosci
a > 0 od niej i jednoczesnie przesuwajac sie ze stała predkoscia b w kierunku tej prostej.Wprost z definicji, z łatwoscia wyprowadzamy parametryzacje linii srubowej
f (t) = (a cos t, a sin t,bt) , t ∈ R.
Zacznijmy od sprawdzenia, czy parametryzacja ta jest regularna. W tym celu obliczamy
wektor predkosci i jego długosc, czyli szybkosc parametryzacji.
f 0(t) = (−a sin t, a cos t, b),
|f 0(t)| =q
(−a sin t)2 + a cos t + b2 =√
a2 + b2 6= 0,
zatem parametryzacja jest regularna, ale nie musi byc naturalna.
Bez trudnosci, co jest raczej rzadkosci˛
a, wyznaczymy parametr naturalny i funkcj˛e zmianyparametru.
s = s(t) =tR 0
|f 0(σ)| dσ =tR 0
√ a2 + b2dσ =
√ a2 + b2t,
t = s√ a2+b2
.
Parametryzacja naturalna g : s → g(s) linii srubowej ma zatem postac
g(s) =³
a cos s√ a2+b2
, a sin s√ a2+b2
, b s√ a2+b2
´, s ∈ R.
Wyznaczmy teraz wektory reperu Freneta.
• T (s) = g0(s) = 1√ a2+b2
³−a sin s√
a2+b2, a cos s√
a2+b2, b
´.
g00
(s) =a
a2+b2 ³− coss
√ a2+b2 ,− sins
√ a2+b2 , 0´ , |g00
(s)| =a
a2+b2 ,
• N (s) = g00(s)|g00(s)|
=³− cos s√
a2+b2,− sin s√
a2+b2, 0´
.
• B(s) = T (s) × N (s) =
¯¯ i j k
−a√ a2+b2
sin s√ a2+b2
a√ a2+b2
cos s√ a2+b2
b√ a2+b2
− cos s√ a2+b2
− sin s√ a2+b2
0
¯¯
= 1√ a2+b2
³b sin s√
a2+b2,−b cos s√
a2+b2, a´
.
Krzywizne mamy juz wyliczona, bo
• k(s) = |g00(s)| = aa2+b2
.
W celu wyznaczenia skrecenia musimy jeszcze obliczyc trzecia pochodna parametryza-cji g
g000(s) = 1
(a2+b2)3
2
³a sin s√
a2+b2,−a cos s√
a2+b2, 0´
oraz iloczyn mieszany
(g0(s) × g00(s) × g000(s)) =
¯¯ −a√
a2+b2sin s√
a2+b2a√
a2+b2cos s√
a2+b2b√
a2+b2
−aa2+b2
cos s√ a2+b2
−aa2+b2
sin s√ a2+b2
0a
(a2+b2)32
sin s√ a2+b2
−a
(a2+b2)32
cos s√ a2+b2
0
¯¯ = a2b
(a2+b2)3.
Skrecenie jest równe
• τ (s) = −(g0(s)·g00(s)·g000(s))
k2(s) = −a2 b
(a2+b2)3
(a2+b2)2
a2 = −b
a2+b2 .
27

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 28/7
Na koniec sprawdzmy równania Freneta. Mamy
• T 0(s) = g00(s) = aa2+b2
³− cos s√
a2+b2,− sin s√
a2+b2, 0´
= k(s)N (s).
• N 0(s) = 1√ a2+b2
³sin s√
a2+b2,− cos s√
a2+b2, 0´
i ten sam wynik otrzymujemy obliczajac
−k(s)T (s)− τ (s)B(s) =
= − aa2+b2
1√ a2+b2
³−a sin s√
a2+b2, a cos s√
a2+b2, b´
+ ba2+b2
1√ a2+b2
³b sin s√
a2+b2,−b cos s√
a2+b2, a´
=
= 1√ a2+b2
³sin s√
a2+b2,− cos s√
a2+b2, 0´
.
• B0(s) = ba2+b2
³cos s√
a2+b2, sin s√
a2+b2, 0´
= −τ (s) (−N (s)) = τ (s)N (s).
Zatem równania Freneta w parametryzacji naturalnej sa spełnione.
Teraz wykonamy analogiczne rachunki, ale bezposrenio w podanej parametryzacji, o
której juz wiemy, ze nie jest naturalna.
Obliczamy potrzebne trzy kolejne pochodnef (t) = (a cos t, a sin t,bt) ,
f 0(t) = (−a sin t, a cos t, b), |f 0(t)| =√
a2 + b2,
f 00(t) = (−a cos t,−a sin t, 0) ,
f 000(t) = (a sin t,−a cos t, 0) .
Mamy
• T (t) = f 0(t)|f 0(t)|
= 1√ a2+b2
(−a sin t, a cos t, b).
Obliczamy iloczyn wektorowy
f 0(t) × f 00(t) = ¯ i j k
−a sin t a cos t b
−a cos t −a sin t 0
¯ = a (b sin t,−b cos t, a)
i jego długosc
|f 0(t) × f 00(t)| = a√
a2 + b2.
Zatem
• B(t) = f 0(t)×f 00(t)|f 0(t)×f 00(t)|
= a(b sin t,−b cos t,a)
a√
a2+b2= 1√
a2+b2(b sin t,−b cos t, a) .
Wektor normalny jest równy
•N
(t) =
B(t)×
T (t) = ¯
i j kb
√ a2
+b2
sin t −b
√ a2
+b2
cos t a
√ a2
+b2
−a√ a2+b2
sin t a√ a2+b2
cos t b√ a2+b2
¯ = (− cost,− sin
t,0)
.
Obliczamy kzywizne
• k(t) = |f 0(t)×f 00(t)|
|f 0(t)|3= a
√ a2+b2
(√
a2+b2)3 = a
a2+b2.
Do wyliczenia skrecenia potrzebny jest iloczyn mieszany
(f 0(t) · f 00(t) · f 000(t)) =
¯¯
¯
−a sin t a cos t b
−a cos t −a sin t 0
a sin t −a cos t 0
¯¯
¯
= a2b.
Skrecenie jest wiec równe
• τ (s) = −(f 0(t)·f 00(t)·f 000(t))
|f 0(t)×f 00(t)|2 = −a2b
a2(a2+b2) = −b
a2+b2 .
28

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 29/7
Sprawdzmy teraz równania Freneta. Mamy
• T 0(t) = −a√ a2+b2
(cos t, sin t, 0) =√
a2 + b2 aa2+b2
(− cos t,− sin t, 0) =
= |f 0(t)| k(t)N (t),
• N 0(t) = (sin t,− cos t, 0) ,
ale równiez|f 0(t)| (−k(t)T (t)− τ (t)B(t)) =
=√
a2 + b2³− a
a2+b21√
a2+b2(−a sin t, a cos t, b)− ¡− b
a2+b2
¢1√
a2+b2(b sin t,−b cos t, a)
´=
= (sin t,− cos t, 0) ,
• B0(t) = b√ a2+b2
(cos t, sin t, 0)
ale takze
|f 0(t)| τ (t)N (t) =√
a2 + b2¡− b
a2+b2
¢(− cos t,− sin t, 0) = b√
a2+b2(cos t, sin t, 0).
Uwzgledniajac zmiane parametru t = s√ a2+b2
, widzimy, ze otrzymalismy te same wyniki
co w parametryzacji naturalnej, i to duzo szybciej.
Wniosek:
W rozwa zaniach teoretycznych parametryzacja naturalna krzywej by ł a z pewno sci a
wygodniejsza od dowolnej parametryzacji regularnej tej krzywej, ale w praktycznych, efek-
tywnych rachunkach zamiana podanej parametryzacji na parametryzacj e naturaln a mo ze
wr ecz utrudni c rachunki. Warto wi ec zastanowi c si e nad stosownym wyborem parame-
tryzacji w zale zno sci od problemu, który mamy rozwi aza c.
29

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 30/7
5. Powierzchnie sparametryzowane i geometryczne.
Potocznie, powierzchnie w R3 sa rozumiane jako obiekty geometryczne "dwuwymi-
arowe". Sprecyzujemy to pojecie.
Definicja 5.1.
• Powierzchni a sparametryzowan a albo pł atem powierzchniowym klasy C k w R3 nazy-
wamy funkcj e dwóch zmiennych, postaci
f : R2 ⊃ U → R3, U − obszar
(u, v) → f (u, v) = (x(u, v), y(u, v), z (u, v)) , gdzi e x,y,z : U → R s a klas y C k.
• Funkcje rzeczywiste x, y, z nazywamy funkcjami wspó ł rz edno sciowymi powierzchni
sparametryzowanej f.
Definicja 5.2.
• Powierzchni a geometryczn a klasy C k w R3 nazywamy zbiór S w R3, który lokalnie,
tzn. w pewnym otoczeniu ka zdego punktu, da si e przedstawi c jako zbiór warto sci ( slad)
pewnej powierzchni sparametryzowanej klasy C k.
• Ka zd a powierzchni e sparametryzowan a f : (u, v) → f (u, v), której obrazem jest
fragment powierzchni geometrycznej S nazwiemy parametryzacj a (lokaln a) powierzchni
geometrycznej S.
Definicja 5.3.
• Liniami wspó ł rz edno sciowymi powierzchni sparametryzowanej f : U 3 (u, v) →f (u, v) przecinaj acymi si e w punkcie (u0, v0) ∈ U, nazywamy krzywe sparametryzowane
f 1 : u → f (u, v0) i f 2 : v → f (u0, v).
• Wektorami stycznymi do linii wspó ł rz edno sciowych nazywamy wektory pr edko sci
krzywych f 1 i f 2, tzn. f 01(u) = f 0u(u, v0) = ∂f
∂u(u, v0) i f 02(v) = f 0v(u0, v) = ∂f
∂v(u0, v).
• Powierzchni e sparametryzowan a f : U 3 (u, v) → f (u, v) nazywamy regularn a,
je zeli w ka zdym punkcie (u, v)∈
U wektory styczne do linii wspó ł rz edno sciowych f 0u(u, v)
i f 0v(u, v) s a liniowo niezale zne, tzn. f 0u(u, v)×f 0v(u, v) 6= 0. (Innymi s ł owy, linie wspó ł rz ed-
no sciowe f 1 i f 2 s a regularnymi krzywymi sparametryzowanymi i zawsze si e krzy zuj a).
• Wektor
N (u, v) =f 0u(u, v) × f 0v(u, v)
|f 0u(u, v) × f 0v(u, v)|
nazywamy wektorem normalnym regularnej powierzchni sparametryzowanej f : U 3 (u, v) →f (u, v).
• Powierzchni e geometryczn a nazywamy regularn a, je zeli lokalnie, tzn. w pewnym
otoczeniu ka zdego punktu, jest ona obrazem pewnej sparametryzowanej powierzchni regu-
larnej (parametryzacji lokalnej).
30

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 31/7
• P ł aszczyzn a styczn a regularnej powierzchni sparametryzowanej f : (u, v) → f (u, v)
w punkcie (u0, v0) nazywamy pł aszczyzn e przechodz ac a przez punkt f (u0, v0) i prostopad ł a
do wektora normalnego N (u0, v0).
• P ł aszczyzn a styczn a do powierzchni geometrycznej regularnej nazywamy pł aszczyzn e
styczn a dowolnej parametryzacji regularnej tej powierzchni.• Ka zd a krzyw a sparametryzowan a postaci g = f ◦ h : I 3 t → f (u(t), v(t)), gdzie
h : I 3 t → h(t) = (u(t), v(t)) ∈ U ⊂ R2 jest krzyw a sparametryzowan a w R2, za s
f : U 3 (u, v) → f (u, v) ∈ R3 jest powierzchni a sparametryzowan a, nazwiemy krzyw a
sparametryzowan a na powierzchni sparametryzowanej f.
• Wektorem stycznym do powierzchni sparametryzowanej nazywamy ka zdy wektor,
który jest wektorem pr edko sci pewnej krzywej sparametryzowanej na tej powierzchni.
Twierdzenie 5.1.
Wektor pr edko sci krzywej sparametryzowanej na regularnej powierzchni sparametry-
zowanej jest kombinacj a liniow a wektorów pr edko sci linii wspó ł rz ednosciowych tej powierzchni.
Wektory styczne w punkcie P powierzchni S tworz a 2-wymiarow a przestrze n wektorow a
T P S.
Dowód: Rozwazmy krzywa sparametryzowana g = f ◦ h : I 3 t → f (u(t), v(t)),
gdzie h : I 3 t → h(t) = (u(t), v(t)) ∈ U ⊂ R2 jest krzywa sparametryzowana w R2, zas
f : U 3 (u, v) → f (u, v) ∈ R3 jest powierzchnia sparametryzowana. Obliczamy wektor
predkosci krzywej g, stosujac wzór na pochodna funkcji złozonej i otrzymujemyg0(t) = d
dt(f ◦ h) (t) = ∂f
∂u(u(t), v(t)) du
dt(t) + ∂f
∂v(u(t), v(t)) dv
dt(t), czyli
g0(t) = u0(t)f 0u(u(t), v(t)) + v0(t)f 0v(u(t), v(t)). ¤
Krzywa na powierzchni sparametryzowanej
31

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 32/7
Wniosek 5.1.
Podane wy zej de fi nicje i twierdzenie ka z a nam wyobra za c sobie regularn a powierzch-
ni e geometryzczn a jako zbiór w R3, który lokalnie wygl ada jak pł aszczyzna , która zosta ł a
pofalowana, ale nie pozaginana, ani nie sci agni eta, tak mocno, ˙ ze straci ł a drugi wymiar.
W ka zdym punkcie istnieje jednoznacznie okre slona pł aszczyzna styczna.
Przykład 5.1.
Najprostsza powierzchnia jest płaszczyzna. Zapiszmy równanie parametryczne płaszczyzny
przechodzacej przez punkt A = (x0, y0, z 0) i rozpietej przez nierównoległe do siebie wek-
tory v = (xv, yv, z v) i w = (xw, yw, z w), tak jak robi sie to w geometrii analitycznej. Mamy
f (u, v) = (x0 + xvu + xwv, y0 + yvu + ywv, z 0 + z vu + z wv) , gdzie u, v ∈ R.
Poniewaz
f 0u(u, v) = (xv, yv, z v) = v i f 0u(u, v) = (xv, yv, z v) = w oraz v × w 6= 0,
to otrzymalismy regularna parametryzacje powierzchni.
Przykład 5.2.
Wyprowadzimy najczesciej stosowana parametryzacje sfery o srodku w punkcie (0, 0, 0)
i promieniu r > 0, zwana parametryzacja geograficzna. Nazwa wzieła sie stad, ze role
parametrów u i v graja odpowiednio szerokosc i długosc geograficzna powierzchni kuli
ziemskiej.
Sfera
Na rysunku widzimy, ze punkt (x,y, 0) lezy na okregu o promieniu ρ = r cos u na
płaszczyznie równika. Zatem
x = ρ cos v = r cos u cos v i y = ρ sin v = r cos u sin v. Ponadto z = r sin u. Otrzymal-
ismy wiec nastepujaca parametryzacje sfery:
f (u, v) = (r cos u cos v, r cos u sin v, r sin u) , gdzie u ∈³−π
2,
π
2
´, v ∈ (0, 2π).
Jest to tylko parametryzacja lokalna, która nie pokrywa południka zerowego i obu biegunów
sfery. Zbadajmy regularnosc otrzymanej parametryzacji.
32

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 33/7
Mamy:
f 0u(u, v) = (−r sin u cos v,−r sin u sin v, r cos u) ,
f 0v(u, v) = (−r cos u sin v, r cos u cos v, 0),
f 0u(u, v) × f 0v(u, v) = ¯i j k
−r sin u cos v −r sin u sin v r cos u−r cos u sin v r cos u cos v 0
¯ =
= −r2 cos u (cos u cos v, cos u sin v, sin u) ,
|f 0u(u, v) × f 0v(u, v)| = r2 |cos u| = r2 cos u.
Dla u ∈¡−π
2 , π2
¢widzimy, ze |f 0u(u, v) × f 0v(u, v)| = r2 cos u 6= 0, wiec parametryzacja
jest regularna.
Wektor normalny jest równy
N (u, v) = f 0u(u,v)×f 0v(u,v)|f 0u(u,v)×f 0v(u,v)|
= − (cos u cos v, cos u sin v, sin u) .
Przykład 5.3.
Powierzchnia obrotowa w R3 nazywamy powierzchnie powstała przez obrót krzywej
zwanej tworzaca, dookoła prostej zwanej osia powierzchni obrotowej. Wykorzystamy
ponizszy rysunek do wyprowadzenie parametryzacji powierzcni obrotowej, której tworzaca
jest krzywa sparametryzowana g(t) = (x(t), 0, z (t)) , t ∈ I, lezaca w płaszczyznie Oxz, zas
osia jest os Oz .
Tworzaca powierzchni obrotowej
Punkt (x(t), 0, z (t)) tworzacej obraca sie w płaszczyznie z = z (t) po okregu o promieniu
r = x(t) i o srodku (0, 0, z (t)). Przyjmijmy parametr t tworzacej za pierwszy parametr
u parametryzacji powierzchni obrotowej, zas miare v kata obrotu za drugi parametr.
Wtedy mamy x = r cos v = x(u)cos v, y = r sin v = x(u)sin v, z = z (u), a tym samym
otrzymalismy parametryzacje
f (u, v) = (x(u)cos v, x(u)sin v, z (u)) , gdzie u ∈ I, v ∈ (0, 2π).
Zbadajmy regularnosc takiej parametryzacji. Obliczamy kolejno
f 0u(u, v) = (x0(u)cos v, x0(u)sin v, z 0(u)) ,
33

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 34/7
f 0v(u, v) = (−x(u)sin v, x(u)cos v, 0) ,
f 0u(u, v) × f 0v(u, v) =
¯
¯
i j k
x0(u)cos v x0(u)sin v z 0(u)
−x(u)sin v x(u)cos v 0
¯
¯=
= (−x(u)z 0
(u)cos v,−x(u)z 0
(u)sin v, x(u)x0
(u)) ,|f 0u(u, v) × f 0v(u, v)| = |x(u)|
q (x0(u))2 + (z 0(u))2 = |x(u)| |g0(u)| .
Z ostatniego wyniku widac, ze otrzymana parametryzacja nie zawsze jest regularna.
Warunkiem regularnosci jest, by jednoczesnie:
• x(u) 6= 0, tzn. tworzaca nie ma punktów wspólnych z osia powierzchni obrotowej,
• g0(u) 6= 0, tzn. parametryzacja tworzacej jest regularna.
Przedstawiony tutaj ogólny sposób parametryzowania powierzchni obrotowych mozna
wykorzystac w konkretnych przypadkach. Gdy tworzaca jest półokrag o srodku (0, 0, 0) i
o srednicy lezacej na osi obrotu, to otrzymamy sfere z wyprowadzona wczesniej parame-
tryzacja geograficzna.
Przykład 5.4.
Jedna z najciekawszych powierzchni obrotowych jest torus. Mozna go otrzymac w
sposób przedstawiony w poprzednim przykładzie przyjmujac za tworzaca okrag o para-
metryzacji g(t) = (a + r cos t, 0, r sin t) , t ∈ (0, 2π). Srodkiem okregu jest (a, 0, 0), a
promieniem r, zatem załozenie a > r > 0 gwarantuje regularnosc parametryzacji. Lokalna
parametryzacja torusa ma postac
f (u, v) = ((a + r cos u)cos v, (a + r cos u)sin v, r sin u) , gdzie u ∈ (0, 2π), v ∈ (0, 2π).
Nie pokrywa ona tylko dwóch okregów na torusie, z których jeden odpowiada u = 0, a
drugi v = 0.
Przykład 5.5.
Na kursie analizy matematycznej wykresy funkcji rzeczywistych ciagłych postaci
ϕ : R2 ⊃ U → R : (x, y) → z = ϕ(x, y), gdzie U jest obszarem, rysowane sa jako
powierzchnie. Zbadamy, kiedy takie wykresy sa powierzchniami geometrycznymi w sensienaszej definicji. Wprowadzmy w tym celu typowa dla wykresów funkcji parametryzacje
f : U → R3 : (u, v) → f (u, v) = (u,v,ϕ(u, v)).
Warunkiem na to, zeby taka parametryzacja była klasy C k jest by funkcja ϕ była
tej klasy. Wektorami predkosci linii współrzednosciowych parametryzacji f sa f 0u(u, v) =
(1, 0, ϕ0u(u, v)) i f 0v(u, v) = (0, 1, ϕ0
v(u, v)) . Zatem
f 0u(u, v) × f 0v(u, v) = ¯i j k
1 0 ϕ0u(u, v)
0 1 ϕ0v(u, v) ¯ = (
−ϕ0
u(u, v),
−ϕ0
v(u, v), 1) 6= (0, 0, 0).
34

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 35/7
Wniosek 5.2.
Wykres funkcji klasy C r, postaci ϕ : R2 ⊃ U → R : (x, y) → z = ϕ(x, y), gdzie U jest
obszarem, jest zawsze powierzchni a geometryczn a regularn a klasy C r.
Innym niz poprzez parametryzacje sposobem okreslania powierzchni geometrycznych
w R3 jest stosowanie tzw. równan ogólnych. Na przykład, chocby z geometrii analitycznej,
wiemy, ze równanie S : x2 + y2 + z 2 = r2 przedstawia sfere. Udowonimy nastepujace
twierdzenie.
Twierdzenie 5.2.
Niech F : R3 ⊃ U → R : (x,y,z ) → F (x,y,z ) bedzie funkcj a klasy C r, okre slon a
na zbiorze otwartym U oraz niech zbiór S punktów (x,y,z ) w U spa ł niaj acych równanie
F (x,y,z ) = 0 bedzie niepusty i
grad F (x0, y0, z 0) :=¡
F 0x(x0, y0, z 0), F 0y(x0, y0, z 0), F 0z(x0, y0, z 0)¢
6= (0, 0, 0),
dla ka zdego (x0, y0, z 0) ∈ S. Wtedy zbiór S jest powierzchni a geometryczn a klasy C r.
Dowód: Niech F (x0, y0, z 0) = 0 i F 0z(x0, y0, z 0) 6= 0. Wtedy na podstawie twierdzenia
o funkcji uwikłanej zbiór S w otoczeniu punktu (x0, y0, z 0) mozna przedstawic w postaci
z = ϕ(x, y), gdzie ϕ(x, y) jest funkcja klasy C r, a jak wczesniej pokazalismy, wykres
funkcji ϕ jest powierzchnia klasy C r.
Jezeli F 0y(x0, y0, z 0) 6= 0, to zbiór S w otoczeniu punktu (x0, y0, z 0) mozna przedstawicw postaci funkcji y = ψ(x, z ), zas jezeli F 0x(x0, y0, z 0) 6= 0, to zbiór S w otoczeniu punktu
(x0, y0, z 0) mozna przedstawic w postaci funkcji x = η(y, z ). ¤
Przykłady 5.6.
• Zastosujemy podane twierdzenie aby potwierdzic, ze sfera S okreslona równaniem
x2+y2+z 2 = r2 rzeczywiscie jest powierzchnia geometryczna. Wezmy funkcje F (x,y,z ) =
x2 + y2 + z 2 − r2, dla której S jest zbiorem rozwiazan równania F (x,y,z ) = 0. Widzimy,
ze gradient grad F (x,y,z ) = (2x, 2y, 2z ) nie zeruje sie nigdzie w punktach S, wiec S
jest krzywa. Jesli x0 6= 0, to F 0x(x0, y0, z 0) = 2x0 6= 0 i w otoczeniu punktu (x0, y0, z 0)
równanie mozna rozwikłac do postaci x = ϕ1(y, z ) =p
r2 − y2 − z 2, gdy x0 > 0, albo
x = ϕ2(y, z ) = −p
r2 − y2 − z 2, gdy x0 < 0. Jesli y0 6= 0, to F 0y(x0, y0, z 0) = 2y0 6= 0
i w otoczeniu punktu (x0, y0, z 0) równanie mozna rozwikłac do postaci y = ψ1(x, z ) =√ r2 − x2 − z 2, gdy y0 > 0, albo y = ψ2(x, z ) = −√ r2 − x2 − z 2, gdy y0 < 0. Jesli z 0 6= 0,
to F 0z(x0, y0, z 0) = 2z 0 6= 0 i w otoczeniu punktu (x0, y0, z 0) równanie mozna rozwikłac do
postaci z = η1(x, y) =p
r2 − x2 − y2, gdy z 0 > 0, albo z = η2(x, y) = −p
r2 − x2 − y2,
gdy z 0 < 0.
35

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 36/7
• Zbadajmy zbiór S okreslony równaniem x2 + y2 − z 2 = 0. Jest to równanie stozka
(podwójnego) o wierzchołku w punkcie (0, 0, 0). Tym razem bierzemy funkcje F (x,y,z ) =
x2 + y2 − z 2 i okazuje sie, ze grad F (x,y,z ) = (2x, 2y,−2z ) zeruje sie w puncie (0, 0, 0)
nalezacym do S. Zatem S nie jest regularna powierzchnia geometryczna. Powodem niereg-
ularnosci jest "czubek" w (0, 0, 0). W tym punkcie nie potrafimy jednoznacznie okreslicpłaszczyzny stycznej, a tym samym wektora prostopadłego do S .
Twierdzenie 5.3.
• Wektor grad F (x0, y0, z 0) =¡
F 0x(x0, y0, z 0), F 0y(x0, y0, z 0), F 0z(x0, y0, z 0)¢
jest w punkcie
(x0, y0, z 0) ∈ S prostopad ł y do powierzchni geometrycznej S : F (x,y,z ) = 0.
•• P ł aszczyzna styczna do powierzchni S w punkcie (x0, y0, z 0) ∈ S ma równanie
[F 0x(x0, y0, z 0)] (x
−x0) + £F 0y(x0, y0, z 0)¤ (y
−y0) + [F 0z(x0, y0, z 0)] (z
−z 0) = 0.
Dowód:
• Kazdy wektor styczny do powierzchni geometrycznej S : F (x,y,z ) = 0 w punkcie
(x0, y0, z 0) jest wektorem predkosci pewnej krzywej sparametryzowanej f : I 3 t →f (t) = (x(t), y(t), z (t)) lezacej na tej powierzchni i przechodzacej przez punkt (x0, y0, z 0) =
f (t0) = (x(t0), y(t0), z (t0)). Mamy zatem F (x(t), y(t), z (t)) = 0, a rózniczkujac te równosc
wzgletem t otrzymujemy
[F 0x(x0, y0, z 0)] x0(t0) + £F 0y(x0, y0, z 0)¤ y0(t0) + [F 0z(x0, y0, z 0)] z 0(t0) = 0.
Widzimy, ze iloczyn skalarny gradientu grad F (x0, y0, z 0) i wektora predkosci f 0(t0) =
(x0(t0), y0(t0), z 0(t0)) zeruje sie, wiec wektory te sa do siebie prostopadłe. Oznacza to, ze
grad F (x0, y0, z 0) jest prostopadły do płaszczyzny stycznej do S w punkcie (x0, y0, z 0).
•• Skoro mamy juz wektor prostopadły do płaszczyzny stycznej do S w punkcie
(x0, y0, z 0), to postac jej równania jest oczywista. ¤
36

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 37/7
6. Pierwsza forma kwadratowa powierzchni.
W tym rozdziale zdefiniujemy tzw.pierwsza forme kwadratowa powierzchni, nazywana
czesto forma metryczna. Pokazuje ona, w jaki sposób iloczyn skalarny z otaczajacej
przestrzeni R3 dziedziczy sie na powierzchnie. Jak zobaczymy, pierwsza forma kwadra-towa pozwoli obliczac długosci krzywych lezacych na powierzchni, katy miedzy przecina-
jacymi sie krzywymi na powierzchni i pola obszarów na powierzchni, bez bezposreniego
odwoływania sie do jej parametryzacji.
Z Twierdzenia 5.1. wiemy juz, ze wektory styczne w kazdym ustalonym punkcie
P powierzchni regularnej S tworza 2-wymiarowa przestrzen wektorowa T P S. Wektory
styczne sa szczególnymi wektorami z otaczajacej przestrzeni R3, wiec mozna je mnozyc
skalarnie. Na kazdej przestrzeni wektorowej T P S jest zatem okreslony iloczyn skalarny,
który jest forma dwuliniowa, symetryczna i dodatnio okreslona. Taka forma ma swoja
forme kwadratowa.
Definicja 6.1.
• Form e kwadratow a okre slon a na przestrzeni wektorowej T P S wektorów stycznych do
powierzchni regularnej S w punkcie P wzorem
ΦP : T P S → R
ΦP (w) = w · w = |w|2
nazywamy pierwsz a form a kwadratow a powierzchni regularnej S w punkcie P.• Funkcj e Φ, która ka zdemu punktowi P powierzchni regularnej S przyporz adkowuje
pierwsz a form e kwadratow a ΦP w punkcie P, nazywamy pierwsz a form a kwadratow a
powierzchni regularnej S.
Przedstawimy pierwsza forme kwadratowa powierzchni regularnej S we współrzednych
wzgledem lokalnej parametryzacji f : R2 ⊃ U → S : (u, v) → f (u, v) = (x(u, v), y(u, v), z (u, v))
tej powierzchni w otoczeniu punktu P . Jak wiemy, kazdy wektor styczny w do powierzchni
S w punkcie P jest postaci
w = g0(t0) = f 0u(u(t0), v(t0))u0(t0) + f 0v(u(t0), v(t0))v0(t0),
gdzie g = f ◦ h : I 3 t → f (u(t), v(t)), natomiast h : I 3 t → h(t) = (u(t), v(t)) ∈U ⊂ R2 jest krzywa sparametryzowana w U. Opuszczajac, dla lepszej czytelnosci zapisu,
argumenty funkcji obliczmy ΦP (w). Otrzymamy
ΦP (w) = w · w =
= (f 0uu0 + f 0vv0) · (f 0uu0 + f 0vv0) =
= (f 0u)2
(u0)2
+ 2 (f 0u · f 0v) u0v0 + (f 0v)2
(v0)2
=
= E (u0)2 + 2F u0v0 + G (v0)2 .
37

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 38/7
Współczynniki E, F, G, które pojawiły sie w zapisie zaleza oczywiscie od punktu P,
a wiec sa funkcjami parametrów u i v.
Definicja 6.2.
• Funkcje
E (u, v) = f 0u(u, v) · f 0u(u, v)
F (u, v) = f 0u(u, v) · f 0v(u, v)
G(u, v) = f 0v(u, v) · f 0v(u, v)
nazywamy wspó ł czynnikami pierwszej formy kwadratowej na powierzchni regularnej S
w parametryzacji f : (u, v) → f (u, v).
• Nie u zywaj ac argumantu w, pierwsz a form e kwadratow a powierzchni regularnej za-
pisujemy we wspó ł rz ednych w postaci
Φ = E (u, v)du2 + 2F (u, v)dudv + G(u, v)dv2.
• Macierz
[Φ(u, v)] =
"E (u, v) F (u, v)
F (u, v) G(u, v)
#nazywamy macierz a wspó ł czynników pierwszej formy kwadratowej w parametryzacji f.
Przykład 6.1.Wyznaczymy pierwsza forme kwadratowa sfery S : x2 + y2 + z 2 = r2 we współrzednych
wzgledem parametryzacji geograficznej f (u, v) = (r cos u cos v, r cos u sin v, r sin u) , gdzie
u ∈ ¡−π2
, π2
¢, v ∈ (0, 2π). W tym celu obliczamy kolejno
f 0u(u, v) = (−r sin u cos v,−r sin u sin v, r cos u) ,
f 0v(u, v) = (−r cos u sin v, r cos u cos v, 0) ,
E (u, v) = f 0u(u, v) · f 0u(u, v) = r2,
F (u, v) = f 0u(u, v) · f 0v(u, v) = 0,
G(u, v) = f 0v(u, v) · f 0v(u, v) = r2 cos2 u.
Zatem pierwsza forma kwadratowa sfery we współrzednych wzgledem parametryzacji
geograficznej ma postac
Φ = r2du2 + r2 cos2 udv2.
Przykład 6.2.
Obliczymy długosc równoleznika sfery S : x2 + y2 + z 2 = r2 na szerokosci geograficznej
u = π6
. Mozna to zrobic wykorzystujac parametryzacje równoleznika, która otrzymujemy
z parametryzacji geograficznej sfery, ustalajac u = π6
i przyjmujac v = t.
g(t) = f ( π6 , t) = ³r
√ 32 cos t, r
√ 32 sin t, r 1
2´ , gdzie t ∈ (0, 2π).
38

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 39/7
W tym momencie w ogóle zapominamy, ze nasza krzywa lezy na sferze. Jej długosc
obliczymy tak, jak robilismy to dla dowolnej sparametryzowanej krzywej regularnej w R3.
Obliczamy wektor predkosci i jego długosc
g0(t) = r√ 32
(− sin t, cos t, 0) ,
|g0(t)| = p g0(t) · g0(t) = r√ 32 .
Długosc równoleznika na szerokosci geograficznej u = π6
wynosi
d =
2πZ 0
|g0(t)| dt =
2πZ 0
r
√ 3
2dt = r
√ 3π.
Potrzebna nam długosc wektora predkosci mozna jednak obliczyc inaczej, wykorzys-
tujac wyznaczona w poprzednim przykładzie pierwsza forme kwadratowa sfery. Nasz
równoleznik, jako krzywa na sferze, opisuja równania
u(t) = π6 , v(t) = t, t ∈ h0, 2πi ,
zatem
u0(t) = 0, v0(t) = 1
i w konsekwencji
|g0(t)| =p Φ (g0(t)) =
q r2 (u0(t))2 + r2 cos2 π
6(v0(t))2 =
=p
r2 cos2 π6 = r cos π
6 = r√ 32 .
Mozemy powiedziec, ze "rachunek w R3” został zastapiony "rachunkiem na powierzchni".
Wniosek 6.1.Je sli mamy dan a pierwsz a form e kwadratow a powierzchni sparametryzowanej f :
(u, v) → f (u, v), to d ł ugo s c ł uku krzywej u = u(t), v = v(t), dla t ∈ ha, bi na tej
powierzchni obliczamy ze wzoru
d =
bZ a
q E (u, v) (u0)2 + 2F (u, v)u0v0 + G(u, v) (v0)2dt.
Kat miedzy przecinajacymi sie krzywymi okreslamy jako kat miedzy wektorami sty-
cznymi do tych krzywych w ich punkcie przeciecia. Z kolei cosinus kata θ miedzy wek-torami v i w mozemy obliczyc za pomoca iloczynu skalarnego
cos θ =v · w
|v| |w|.
Iloczyn skalarny v · w wektorów stycznych w tym samym punkcie do powierzchni
obliczymy wykorzystujac forme biegunowa pierwszej formy kwadratowej. Jest to forma
dwuliniowa BΦ, która na wektorach v = u0f 0u + v0f 0v, w =
eu0f 0u +
ev0f 0v przyjmuje wartosc
v · w = BΦ (v, w) = Eu
0eu0
+ F (u
0ev0
+ v
0eu0
) + Gv
0ev0
.
39
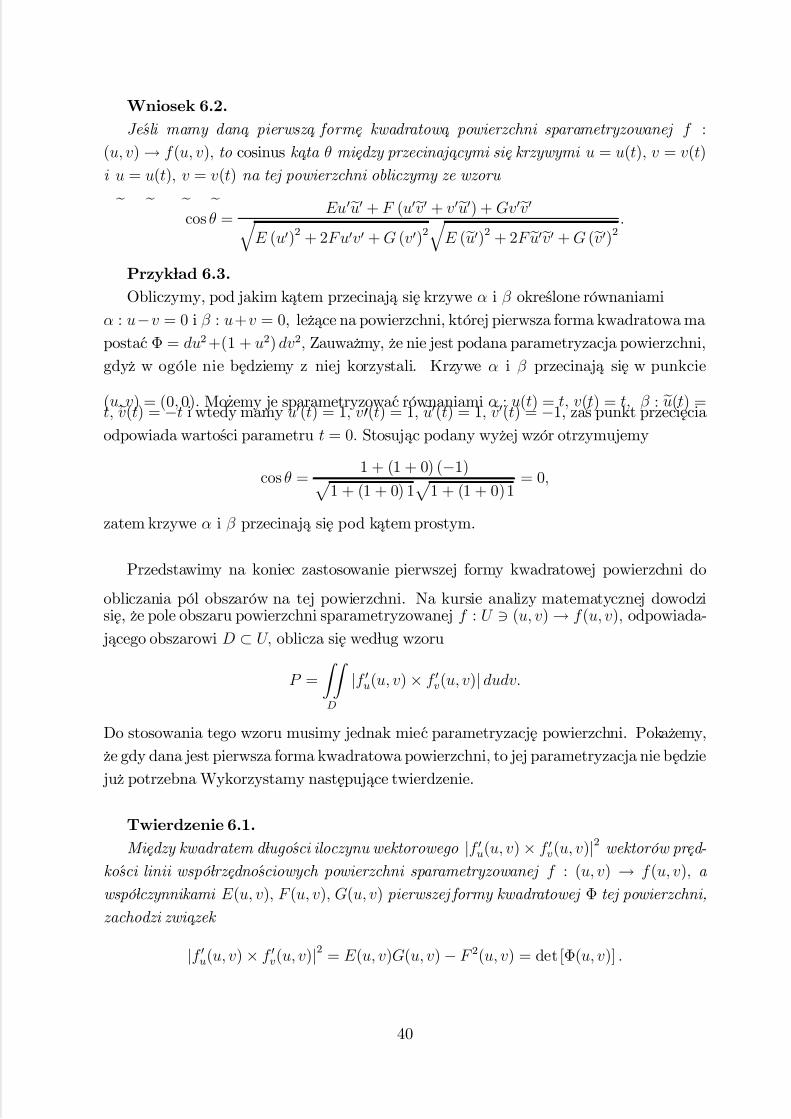
5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 40/7
Wniosek 6.2.
Je sli mamy dan a pierwsz a form e kwadratow a powierzchni sparametryzowanej f :
(u, v) → f (u, v), to cosinus k ata θ mi edzy przecinaj acymi si e krzywymi u = u(t), v = v(t)
i eu = eu(t), ev = ev(t) na tej powierzchni obliczymy ze wzoru
cos θ =Eu0eu0 + F (u0ev0 + v0eu0) + Gv0ev0q
E (u0)2 + 2F u0v0 + G (v0)2q
E (eu0)2 + 2F eu0ev0 + G (ev0)2.
Przykład 6.3.
Obliczymy, pod jakim katem przecinaja sie krzywe α i β okreslone równaniami
α : u−v = 0 i β : u + v = 0, lezace na powierzchni, której pierwsza forma kwadratowa ma
postac Φ = du2 +(1 + u2) dv2, Zauwazmy, ze nie jest podana parametryzacja powierzchni,
gdyz w ogóle nie bedziemy z niej korzystali. Krzywe α i β przecinaja sie w punkcie
(u, v) = (0, 0). Mozemy je sparametryzowac równaniami α : u(t) = t, v(t) = t, β : eu(t) =t, ev(t) = −t i wtedy mamy u0(t) = 1, v0(t) = 1, eu0(t) = 1, ev0(t) = −1, zas punkt przeciecia
odpowiada wartosci parametru t = 0. Stosujac podany wyzej wzór otrzymujemy
cos θ =1 + (1 + 0) (−1)p
1 + (1 + 0) 1p
1 + (1 + 0)1= 0,
zatem krzywe α i β przecinaja sie pod katem prostym.
Przedstawimy na koniec zastosowanie pierwszej formy kwadratowej powierzchni do
obliczania pól obszarów na tej powierzchni. Na kursie analizy matematycznej dowodzisie, ze pole obszaru powierzchni sparametryzowanej f : U 3 (u, v) → f (u, v), odpowiada-
jacego obszarowi D ⊂ U, oblicza sie według wzoru
P =
ZZ D
|f 0u(u, v) × f 0v(u, v)| dudv.
Do stosowania tego wzoru musimy jednak miec parametryzacje powierzchni. Pokazemy,
ze gdy dana jest pierwsza forma kwadratowa powierzchni, to jej parametryzacja nie bedzie
juz potrzebna Wykorzystamy nastepujace twierdzenie.
Twierdzenie 6.1.
Mi edzy kwadratem d ł ugo sci iloczynu wektorowego |f 0u(u, v) × f 0v(u, v)|2 wektorów pr ed-
ko sci linii wspó ł rz edno sciowych powierzchni sparametryzowanej f : (u, v) → f (u, v), a
wspó ł czynnikami E (u, v), F (u, v), G(u, v) pierwszej formy kwadratowej Φ tej powierzchni,
zachodzi zwi azek
|f 0u(u, v) × f 0v(u, v)|2
= E (u, v)G(u, v)− F 2(u, v) = det [Φ(u, v)] .
40

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 41/7
Dowód: Z kursu geometrii analitycznej wiemy, ze
|f 0u(u, v) × f 0v(u, v)| = |f 0u(u, v)| |f 0v(u, v)| sin θ,
gdzie θ jest miara kata miedzy mnozonymi wektorami. Zatem
|f 0u(u, v) × f 0v(u, v)|2 = |f 0u(u, v)|2 |f 0v(u, v)|2 sin2 θ =
= |f 0u(u, v)|2 |f 0v(u, v)|2 (1− cos2 θ) == (f 0u(u, v) · f 0u(u, v)) (f 0v(u, v) · f 0v(u, v))− (f 0u(u, v) · f 0v(u, v))2 =
= E (u, v)G(u, v)− F 2(u, v) = det [Φ(u, v)] . ¤
Wniosek 6.3.
Je sli mamy dan a pierwsz a form e kwadratow a powierzchni sparametryzowanej
f : U ⊃ (u, v) → f (u, v), to pole P obszaru tej powierzchni odpowiadaj acego obszarowi
D ⊂ U, obliczymy ze wzoru
P = ZZ D
p E (u, v)G(u, v)− F 2(u, v)dudv = ZZ D
p det[Φ(u, v)]dudv.
Przykład 6.4.
Wykorzystujac wyznaczona w Przykładzie 6.1 pierwsza forme kwadratowa
Φ = r2du2 + r2 cos2 udv2 sfery S : x2 + y2 + z 2 = r2 w parametryzacji geograficznej,
obliczymy pole czesci sfery (czaszy) lezacej ponad równoleznikem na szerokosci geograficznej
u = π6
. Odpowiada ona prostokatowi D = {(u, v), π6
≤u
≤π2
, 0
≤v
≤2π} w przestrzeni
parametrów. Mamy wiec
P =RR D
p E (u, v)G(u, v)− F 2(u, v)dudv =
=2πR 0
Ãπ
2R π
6
√ r2r2 cos2 udu
!dv = r2
2πR 0
Ãπ
2R π
6
cos udu
!dv = πr2.
Otrzymany wynik oznacza, ze równolezniki na szerokosciach geograficznych−π6
, 0 (równik)
i π6 dziela sfere na cztery czesci o takich samych polach.
41

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 42/7
7. Druga forma kwadratowa powierzchni zorientowanej.
Zajmiemy sie teraz okresleniem tzw.drugiej formy kwadratowej powierzchni regularnej.
Potrzebne nam beda dodatkowe pojecia, takie jak orientacja powierzchni i pochodna
kierunkowa funkcji wektorowej.Istnieja powierzchnie, które maja tylko jedna strone. Przykładem jest przedstawiona
na rysunku wstega Möbiusa
Wstega Möbiusa
Przesuwajac sie po powierzchni jednostronnej i nie przechodzac przez jej brzeg, mozna
znalezc sie ponownie w tym samym punkcie, ale "po drugiej stronie powierzchni". Został
uzyty cudzysłów, gdyz w rzeczywistosci jest to ta sama strona. Jezeli powierzchnia
ma dwie strony, to wybór jednej z nich nazywamy orientacja powierzchni dwustron-
nej. Sposobem na wskazanie wybranej strony powierzchni dwustronnej jest ciagłe przy-porzadkowanie kazdemu punktowi powierzchni niezerowego wektora prostopadłego do
powierzchni, wskazujacego wybrana strone.
Jak juz wiemy, lokalna parametryzacja regularna f : U 3 (u, v) → f (u, v) powierzchni
geometrycznej S wyznacza w kazdym punkckie f (u, v) obszaru f (U ) ⊂ S, jednostkowy
wektor normalny
N (u, v) =f 0u(u, v) × f 0v(u, v)
|f 0u(u, v) × f 0v(u, v)|,
zatem kazda lokalna parametryzacja regularna powierzchni geometrycznej orientuje ja,
ale tylko na fragmencie, który pokrywa. Wynika stad, ze powierzchnie, które w całoscimozna pokryc jedna parametryzacja sa dwustronne. Równiez, gdy cała powierzchnie
geometryczna mozna pokryc wieloma parametryzacjami tak, ze na czesciach wspólnych
wektory normalne róznych parametryzacji pokrywaja sie, to powierzchnia jest dwustronna
i zorientowana przez dane parametryzacje. Tylko takie powierzchnie dopuszczamy w
naszych dalszych rozwazaniach.
Nastepnym pojeciem, które bedzie nam potrzebne jest, znana z kursu analizy matema-
tycznej, pochodna kierunkowa funkcji wektorowej.
42

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 43/7
Wezmy dowolny wektor w styczny do powierzchni sparametryzowanej f : (u, v) →f (u, v) w punkcie P. Wektor taki musi byc wektorem predkosci pewnej krzywej na powierz-
chni, tzn. musi byc postaci
w = g0(t0) = f
0
u(u(t0), v(t0))u
0
(t0) + f
0
v(u(t0), v(t0))v
0
(t0),
gdzie g = f ◦h : I 3 t → f (u(t), v(t)), natomiast h : I 3 t → h(t) = (u(t), v(t)) ∈ U ⊂ R2
jest krzywa sparametryzowana w U. Rozpatrujemy wektor normalny tylko wzdłuz krzywej
g, czyli funkcje N : t → N (t) = N (u(t), v(t)). Rózniczkujac te funkcje otrzymamy wektor
N 0(t) = N 0u(t)u0(t) + N 0v(t)v0(t).
Wektor ten nazywamy pochodna kierunkowa wektora N w kierunku wektora w w punkcie
P i oznaczamy symbolem dN P (w). Mozemy wiec zapisac
dN P (w) = N 0u(t)u0(t) + N 0v(t)v0(t).
Obliczajac pochone czastkowe obu stron równosci N (u, v) · N (u, v) = 1, otrzymamy
N 0u(u, v) · N (u, v) + N (u, v) · N 0u(u, v) = 0, czyli N 0u(u, v) · N (u, v) = 0 oraz
N 0v(u, v) · N (u, v) + N (u, v) · N 0v(u, v) = 0, czyli N 0v(u, v) · N (u, v) = 0.
Oznacza to, ze N 0u(u, v) i N 0v(u, v), a tym samym pochodna kierunkowa dN P (w), sa wek-
torami stycznymi do powierzchni w punkcie P. Ma wiec sens iloczyn skalarny dN P (w) · w.
Po tych wyjasnieniach bedzie juz zrozumiała nastepujaca definicja.
Definicja 7.1.
• Form e kwadratow a na przestrzeni wektorowej T P S wektorów stycznych w punkcie
P do powierzchni regularnej S, zorientowanej wektorem normalnym N, okre slon a
wzorem
ΨP : T P S → R
ΨP (w) = −dN P (w) · w ,
nazywamy drug a form a kwadratow a zorientowanej powierzchni regularnej S w punk-cie P.
• Funkcj e Ψ, która ka zdemu punktowi P powierzchni regularnej S przyporz adkowuje
drug a form e kwadratow a ΨP w punkcie P, nazywamy drug a form a kwadratow a
powierzchni regularnej S.
Przedstawimy druga forme kwadratowa powierzchni regularnej S we współrzednych
wzgledem lokalnej parametryzacji f : R2 ⊃ U → S : (u, v) → f (u, v) tej powierzchni w
otoczeniu punktu P. Uzywajac oznaczen z rozwazan poprzedzajacych ostatnia definicje
43

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 44/7
i opuszczajac, dla lepszej czytelnosci zapisu, argumenty funkcji obliczmy ΨP (w). Otrzy-
mamy
ΨP (w) = −dN P (w) · w =
= − (N 0uu
0
+ N 0vv
0
) · (f 0uu
0
+ f 0vv
0
) == − (N 0u · f 0u) (u0)
2 − (N 0u · f 0v + N 0v · f 0u) u0v0 − (N 0v · f 0v) (v0)2
=
= l (u0)2
+ 2mu0v0 + n (v0)2
.
Współczynniki l, m, n, które pojawiły sie w zapisie zaleza oczywiscie od punktu P, a wiec
sa funkcjami parametrów u i v.
Definicja 7.2.
• Funkcje
l(u, v) = −N 0u(u, v) · f 0u(u, v)
m(u, v) = −1
2(N 0u(u, v) · f 0v(u, v) + N 0v(u, v) · f 0u(u, v))
n(u, v) = −N 0v(u, v) · f 0v(u, v)
nazywamy wspó ł czynnikami drugiej formy kwadratowej na powierzchni regularnej S
zorientowanej parametryzacj a f : (u, v) → f (u, v).
• Nie u zywaj ac argumantu w, drug a form e kwadratow a powierzchni regularnej zapisu-
jemy we wspó ł rz ednych w postaci
Ψ = l(u, v)du2 + 2m(u, v)dudv + n(u, v)dv2.
• Macierz
[Ψ(u, v)] =
"l(u, v) m(u, v)
m(u, v) n(u, v)
#nazywamy macierz a wspó ł czynników drugiej formy kwadratowej w parametryzacji f .
Podane w powyzszej defi
nicji wzory na współ
czynniki drugiej formy kwadratowejsa niewygodne w praktycznych rachunkach, gdyz konieczne jest rózniczkowanie wek-
tora normalnego, w którego definicji mamy czynnik normujacy (niewygodny mianownik).
Kosztem korzystania z drugich pochodnych czastkowych, mozna jednak te niedogodnosc
usunac.
Wektory f 0u i f 0v sa prostopadłe do wektora N, zatem
N · f 0u = 0,
N · f 0v = 0.
Obliczajac pochodne czastkowe obu stron tych równan otrzymamy
44

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 45/7
N 0u · f 0u + N · f 00uu = 0,
N 0v · f 0u + N · f 00uv = 0,
N 0u · f 0v + N · f 00vu = 0,
N 0v · f 0v + N · f 00vv = 0.
Ponadto wiemy, zef 00uv = f 00vu
oraz, ze
|f 0u(u, v) × f 0v(u, v)| =p
E (u, v)G(u, v)− F 2(u, v) =p
det[Φ(u, v)].
Teraz łatwo juz mozemy zapisac współczynniki drugiej formy kwadratowej bez uzywania
pochodnych czastkowych wektora normalnego.
Wniosek 7.1.
W praktycznych rachunkach, wspó ł czynniki drugiej formy kwadratowej powierzchni reg-
ularnej, sparametryzowanej i zorientowanej parametryzacj a f : (u, v) → f (u, v), naj-
wygodniej jest oblicza c ze wzorów
l(u, v) =(f 0u(u, v) · f 0v(u, v) · f 00uu(u, v))
|f 0u(u, v) × f 0v(u, v)|=
(f 0u(u, v) · f 0v(u, v) · f 00uu(u, v))p det[Φ(u, v)]
m(u, v) =(f 0u(u, v) · f 0v(u, v) · f 00uv(u, v))
|f 0u(u, v) × f 0v(u, v)|=
(f 0u(u, v) · f 0v(u, v) · f 00uv(u, v))p det[Φ(u, v)]
n(u, v) =(f 0u(u, v) · f 0v(u, v) · f 00vv(u, v))
|f 0u(u, v) × f 0v(u, v)|=
(f 0u(u, v) · f 0v(u, v) · f 00vv(u, v))
p det[Φ(u, v)].
Przykład 7.1.
Sfera jest powierzchnia dwustronna i globalnie mozna ja zorientowac. Obliczymy we
współrzednych druga forme kwadratowa na czesci sfery S : x2 + y2 + z 2 = r2 bez połud-
nika zerowego, która jest pokryta i zorientowana parametryzacja geograficzna f (u, v) =
(r cos u cos v, r cos u sin v, r sin u) , u ∈¡−π
2 , π2
¢, v ∈ (0, 2π). Mozemy wykorzystac wyniki
rachunków z Przykładu 6.1.
f 0u(u, v) = (−r sin u cos v,−r sin u sin v, r cos u) ,
f 0v(u, v) = (
−r cos u sin v, r cos u cos v, 0) ,
E (u, v) = f 0u(u, v) · f 0u(u, v) = r2,
F (u, v) = f 0u(u, v) · f 0v(u, v) = 0,
G(u, v) = f 0v(u, v) · f 0v(u, v) = r2 cos2 u.
Ponadto obliczamyp detΦM (u, v) = r2 cos u,
f 00uu(u, v) = (−r cos u cos v,−r cos u sin v,−r sin u) ,
f 00uv(u, v) = (r sin u sin v,−r cos v sin u, 0) ,
f 00vv(u, v) = (−r cos u cos v,−r cos u sin v, 0) .
45

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 46/7
(f 0u(u, v) · f 0v(u, v) · f 00uu(u, v)) =
¯¯
¯
−r sin u cos v −r sin u sin v r cos u
−r cos u sin v r cos u cos v 0
−r cos u cos v −r cos u sin v −r sin u
¯¯
¯
= r3 cos u,
(f 0u(u, v) · f 0v(u, v) · f 00uv(u, v)) = ¯ −r sin u cos v −r sin u sin v r cos u
−r cos u sin v r cos u cos v 0r sin u sin v −r cos v sin u 0
¯ = 0,
(f 0u(u, v) · f 0v(u, v) · f 00vv(u, v)) =
¯¯ −r sin u cos v −r sin u sin v r cos u
−r cos u sin v r cos u cos v 0
−r cos u cos v −r cos u sin v 0
¯¯ = r3 cos3 u.
Stad otrzymujemy
l(u, v) = r, m(u, v) = 0, n(u, v) = r cos2 u,
zatem druga forma kwadratowa sfery we współrzednych wzgledem parametryzacji ge-
ograficznej ma postac
Ψ = r (du)2 + r cos2 u (dv)2 .
46

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 47/7
8. Zastosowania pierwszej i drugiej formy kwadratowej powierzchni.
Druga forma kwadratowa powierzchni jest nieraz nazywana forma kształtu powierzchni.
Uzasadnimy to okreslenie pokazujac, w jaki sposób druga forma zwiazana jest z zakrzy-
wieniem powierzchni.Zaczniemy od okreslenia tzw.krzywizny normalnej.
Definicja 8.1.
Niech C bedzie przechodz ac a przez punkt P ∈ S regularn a krzyw a geometryczn a na reg-
ularnej, zorientowanej wektorem normalnym N powierzchni geometrycznej S oraz niech
k bedzie krzywizn a krzywej C w punkcie P. Ponadto niech cos θ = n · N bedzie cosi-
nusem miary k ata θ mi edzy wektorem normalnym n krzywej C i wektorem normalnym
N powierzchni S w punkcie P. Liczbe
kn = k cos θ = k (n · N ) = N · kn
nazywamy krzywizn a normaln a krzywej C na powierzchni S w punkcie P. Gdy orientacj e
powierzchni zmienimy na przeciwn a, to znak krzywizny normalnej zmieni si e na przeciwny.
Jesli mamy dana druga forme kwadratowa powierzchni, to mozna jej uzyc do wyz-
naczenia krzywizny normalnej znacznie szybciej niz z definicji. Rozwazmy krzywa geom-
etryczna C na powierzchni S sparametryzowana parametryzacja naturalna f : s
→f (s)
tak, ze f 0(0) = P. Niech s → N (s) bedzie zawezniem wektora normalnego N do krzywej
C. Wiemy, ze N (s) · f 0(s) = 0, wiec
N 0(s) · f 0(s) + N (s) · f 00(s) = 0, czyli
N (s) · f 00(s) = −N 0(s) · f 0(s).
Obliczmy wartosc drugiej formy kwadratowej na jednostkowym wektorze predkosci f 0(0)
w punkcie P.
Ψ (f 0(0)) = − [dN (f 0(0))] · (f 0(0)) =
= −N 0(0) · (f 0(0)) = N (0) · f 00(0) =
= N (0) · (kn) = kn.Otrzymalismy nastepujace twierdzenie.
Twierdzenie 8.1.
Warto s c drugiej formy kwadratowej ΨP na jednostkowym wektorze w stycznym do
powierzchni w punkcie P jest równa krzywi znie normalnej dowolnej krzywej regularnej na
powierzchni, przechodz acej przez P i stycznej do w.
Z powyzszego twierdzenia otrzymujemy natychmiastowy wniosek.
47

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 48/7
Wniosek 8.1.
Wszystkie krzywe geometryczne le z ace na powierzchni S, przechodz ace przez punkt
P i maj ace w P t e sam a prost a styczn a, maj a w punkcie P t e sam a krzywizn e nor-
maln a. Krzywizna normalna w punkcie P jest wi ec funkcj a tylko kierunku stycznego do
powierzchni S w tym punkcie.
Przykład 8.1.
Obliczymy krzywizne normalna krzywej g(t) = (cos t, sin t, 1) na paraboloidzie elipty-
cznej S z parametryzacja f (u, v) = (u,v,u2 + v2) , na dwa sposoby.
• W pierwszym sposobie wykorzystamy definicje krzywizny normalnej. Zauwazmy, ze
g0(t) = (− sin t, cos t, 0) i |g0(t)| = 1, zatem parametryzacja g jest naturalna. W takim
przypadku wektor przyspieszenia jest wektorem krzywizny krzywej, tzn.
g00(t) = k(t)n(t),
gdzie k(t) i n(t) sa odpowiednio krzywizna i wektorem normalnym krzywej g. Mamy wiec
kn = k cos θ = k (n · N ) = (kn) · N = g00 · N.
Obliczamy wektor przyspieszenia g00
g00(t) = (− cos t,− sin t, 0),
a nastepnie wektor normalny N powierzchni S.
f 0u(u, v) = (1, 0, 2u) ,
f 0v(u, v) = (0, 1, 2v) ,
f 0u(u, v) × f
0v(u, v) = ¯
i j k
1 0 2u0 1 2v
¯ = (−2u,−2v, 1) ,
|f 0u(u, v) × f 0v(u, v)| =√
4u2 + 4v2 + 1,
N (u, v) = f 0u(u,v)×f 0v(u,v)|f 0u(u,v)×f 0v(u,v)|
= 1√ 4u2+4v2+1
(−2u,−2v, 1) .
Wektor normalny N (t) wzdłuz krzywej g(t) otrzymamy wstawiajac u = cos t, v = sin t
N (t) = 1√ 5
(−2cos t,−2sin t, 1) .
Teraz mozemy juz wyliczyc krzywizne normalna krzywej g
kn(t) = g00(t) · N (t) = 2√ 5
.
• Drugi sposób polega na obliczeniu krzywizny normalnej jako wartosc drugiej formy
kwadratowej na jednostkowym wektorze g0(t). Wyznaczamy najpierw współczynniki drugiej
formy.
f 00uu(u, v) = (0, 0, 2) ,
f 00uv(u, v) = (0, 0, 0) ,
f 00vv(u, v) = (0, 0, 2) ,
(f 0u(u, v) · f 0v(u, v) · f 00uu(u, v)) = 2,
(f 0u(u, v) · f 0v(u, v) · f 00uv(u, v)) = 0,
(f 0u(u, v) · f 0v(u, v) · f 00vv(u, v)) = 2,
l(u, v) =2
√ 4u2+4v2+1 , m(u, v) = 0, n(u, v) =2
√ 4u2+4v2+1 .
48

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 49/7
Zatem druga forma kwadratowa ma postac
Ψ = 2√ 4u2+4v2+1
(du)2 + 2√ 4u2+4v2+1
(dv)2 .
Podstawiajac u = cos t, v = sin t otrzymamy
kn(t) = Ψ (g0(t)) = 2√ 5
(− sin t)2 + 2√ 5
(cos t)2 = 2√ 5
.
Szczególna krzywa biegnaca na powierzchni w kierunku wektora w stycznego do powierz-
chni w punkcie P, jest tzw. przekrój normalny powierzchni w punkcie P w kierunku w.
Jest to krzywa płaska otrzymana jako przeciecie powierzchni z płaszczyzna przechodzaca
przez P , rozpieta przez wektory w i N. Wektor normalny nn przekroju normalnego jest
zawsze równoległy do wektora normalnego N powierzchni, zatem otrzymujemy łatwa do
wizualizacji interpretacje krzywizny normalnej w kierunku w. Rysunek przedstawia przy-
padek, z tak zorientowana powierzchnia, ze wektor nn ma zwrot przeciwny do zwrotu
wektora N, wiec krzywizna normalna jest ujemna.
Przekrój normalny
Twierdzenie 8.2.
Krzywizna normalna powierzchni S w punkcie P w kierunku w jest równa (z dok ł ad-
no sci a do znaku, w zale zno sci od orientacji powierzchni) zwyk ł ej krzywi znie przekroju
normalnego powierzchni S w punkcie P w kierunku w.
Odwołujac sia do stosownych twierdzen z algebry liniowej, dotyczacych wartosci i wek-
torów własnych odwzorowan samosprzezonych dwuwymiarowych przestrzeni wektorowych
z iloczynem skalarnym, mozna udowodnic nastepujace twierdzenie dotyczace powierzchni.
Twierdzenie 8.3.
• W ka zdym punkcie P powierzchni S pochodna kierunkowa dN P jest, jako funkcja
wektora kierunku, odwzorowaniem samosprz e zonym przestrzeni T pS wektorów stycznych
w siebie.
49

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 50/7
• W ka zdej przestrzeni T P S istnieje przynajmniej jedna baza ortonormalna ©
k1, k2
ª,
której wektory s a wektorami w ł asnymi odwzorowania dN P z warto sciami w ł asnymi −k1 i
−k2, tzn. dN P
¡k1
¢= −k1k1 i dN P
¡k2
¢= −k2k2.
• k1 i k2 s a ekstremalnymi warto sciami drugiej formy kwadratowej
ΨP (w) = −dN P (w) · w w punkcie P, zaw e zonej do okr egu wektorów jednostkowych w w T P S, czyli ekstremalnymi warto sciami krzywizny normalnej kn powierzchni S w punkcie
P.
Tym waznym wektorom i ekstremalnym wartosciom krzywizny normalnej, o których
jest mowa w powyzszym twierdzeniu, nadano specjalne nazwy.
Definicja 8.2.
• Ekstremalne warto sci k1 i k2 krzywizny normalnej kn w punkcie P powierzchni S
nazywamy krzywiznami g ł ównymi powierzchni S w punkcie P.
• Kierunki prostopad ł ych do siebie wektorów k1 i k2, w których krzywizna normalna
kn osi aga ekstrema nazywamy kierunkami g ł ównymi powierzchni S w punkcie P.
Uwaga:
Pamietac nalezy, ze k1 i k2 sa wektorami stycznymi z T pS , wiec w bazie {f 0u, f 0v}
zapisujemy je w postaci
k1 = f 0uu01 + f 0vv0
1, k2 = f 0uu02 + f 0vv0
2.
Na podstawie wartosci krzywizn głównych mozna sklasyfikowac punkty na powierzchni.
Definicja 8.3.
W zale zno sci od warto sci krzywizn g ł ównych k1 i k2 w punkcie P, punktowi temu
nadaje si e jedn a z nast epuj acych nazw :
• k1k2 > 0 - punkt eliptyczny; w szczególno sci, gdy k1 = k2 6= 0 - punkt koł owy,
• k1k2 < 0 - punkt hiperboliczny,
• k1 = 0, k2 6= 0 - punkt paraboliczny,• k1 = 0, k2 = 0 - punkt spł aszczenia.
Przykłady 8.1.
Posługujac sie przekrojami normalnymi, w przypadku niektórych elementarnych powierz-
chni, potrafimy bez rachunków podac kierunki główne i krzywizny główne. Oto kilka
przykładów.
• P ł aszczyzna : Kazdy przekrój normalny płaszczyzny jest prosta. Krzywizna prostej
jest równa k = 0, zatem krzywizna normalna płaszczyzny w kazdym jej punkcie i w
kazdym kierunku jest równa kn = 0. W kazdym punkcie krzywizny główne sa równe
50

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 51/7
k1 = k2 = 0, czyli kazdy punkt jest punktem spłaszczenia. W kazdym punkcie kazda para
kierunków do siebie prostopadłych jest para kierunków głównych.
• Sfera : Kazdy przekrój normalny sfery o promieniu r jest okregiem o promieniu r.
Krzywizna takiego okregu wynosi k = 1r
, zatem krzywizna normalna sfery w kazdym jej
punkcie i w kazdym kierunku jest równa kn = ±1r , (znak zalezy od wybranej orientacjisfery). W kazdym punkcie krzywizny główne sa równe k1 = k2 = ±1
r, czyli kazdy punkt
jest punktem kołowym. W kazdym punkcie kazda para kierunków do siebie prostopadłych
jest para kierunków głównych.
• Walec : Przekrój normalny walca o promieniu r w kierunku równoległym do jego osi
jest prosta, a w kierunku prostopadłym do osi, okregiem o promieniu r. W pozostałych
kierunkach przekroje normalne sa elipsami. Zatem w kazdym punkcie walca krzywizna
normalna, w zaleznosci od kierunku, przyjmuje wartosci miedzy swymi ekstremalnymi
wartosciami wynoszacymi 0 i ±1
r
. W kazdym punkcie krzywizny główne sa wiec równe
k1 = 0, w kierunku głównym k1 równoległym do osi walca i k2 = ±1r
, w kierunku głównym
k2 prostopadłym do osi walca. Kazdy punkt jest punktem parabolicznym.
• Torus powstały przez obrót okregu o promieniu r po okregu o promieniu a > r : Po-
trafimy podac krzywizny główne i kierunki główne w punktach zaznaczonych na rysunku.
Torus został zorientowany wektorem normalnym N biegnacym "na zewnatrz".
Torus
• Ma ł pie siod ł o: W tym siodle jest miejsce na nogi i ogon małpy. Wydaje sie, ze na
dnie siodła sa nie dwa, ale trzy wyróznione kierunki, w których powierzchnia maksymalnie
zakrzywia sie. Tymczasem twierdzenie mówi o dwóch takich kierunkach. Wytłumaczenie
moze byc tylko jedno: Na dnie siodła wszystkie narysowane krzywe maja punkt wypros-
towania (ich krzywizny zeruja sie), a siodło ma punkt spłaszczenia. Obie krzywizny główne
zeruja sie, a kazda para kierunków stycznych, prostopadłych do siebie jest para kierunków
głównych.
51

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 52/7
Małpie siodło
Pokazemy teraz jak we współrzednych lokalnych obliczyc krzywizny główne i kierunki
główne dowolnej zorientowanej powierzchni regularnej w dowolnym jej punkcie.
Twierdzenie 8.4.
Niech f : (u, v) → f (u, v) bedzie lokaln a parametryzacj a powierzchni regularnej S
orientuj ac a t e powierzchni e wektorem normalnym N : (u, v) → N (u, v) = f 0u(u,v)×f 0v(u,v)|f 0u(u,v)×f 0v(u,v)|
.
• Krzywizny g ł ówne k1, k2 powierzchni S s a pierwiatkami równania kwadratowego
det([Ψ(u, v)]− k [Φ(u, v)]) = 0,
gdzie [Φ(u, v)] i [Ψ(u, v)] s a odpowiednio macierzami pierwszej i drugiej formy kwadra-
towej powierzchni S w parametryzacji f.
•• Kierunek g ł ówny ki powierzchni S odpowiadaj acy krzywi znie g ł ównej ki , i = 1, 2,
jest niezerowym rozwi azaniem równania
([Ψ(u, v)]− ki [Φ(u, v)]) ki = 0, i = 1, 2.
Dowód: Istota dowodu polega na zapiasaniu równan na krzywizny główne i kierunki
główne w równowazny sposób, tak zeby nie wystepowała w nich macierz odwzorowania
dN, której w sposób jawny nie mamy.
Niech [Φ], [Ψ] i [dN ] beda odpowiednio macierzami pierwszej i drugiej formy kwadra-
towej oraz pochodnej kierunkowej wektora N w parametryzacji f . Z definicji drugiej
formy kwadratowej Ψ(w) = −dN (w) · w wynika, ze macierze te zwiazane sa równoscia
[Ψ] = [Φ] [−dN ] .
• Wiemy, ze −k1 i −k2 sa wartosciami własnymi macierzy [dN ] , zatem k1 i k2 sa
pierwiastkami równania
52

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 53/7
det([dN ]− (−k) [I ]) = 0.
Pomnózmy to równanie stronami przez wyznacznik det[Φ], o którym wiemy, ze nie zeruje
sie. Otrzymamy równanie równowazne
det[Φ]det([dN ] + k [I ]) = 0.
Stosujac twierdzenie o wyznaczniku iloczynu macierzy dostaniemydet([Φ] ([dN ] + k [I ])) = 0,
czyli
det ([Φ] [dN ] + k [Φ]) = 0,
jak równiez
det ([Φ] [−dN ]− k [Φ]) = 0.
Wykorzystujac zaleznosc [Ψ] = [Φ] [−dN ] otrzymujemy równanie
det([Ψ]− k [Φ]) = 0.
•• Wiemy, ze kierunek główny ki (i = 1, 2) jest wektorem własnym macierzy [dN ]
odpowiadajacym wartosci własnej −ki, zatem jest rozwiazaniem równania
([dN ]− (−ki) [I ]) k = 0.
Mnozac to równanie stronami przez macierz − [Φ] otrzymamy
− [Φ] ([dN ] + ki [I ]) k = 0,
czyli
([Φ] [−dN ]− ki [Φ]) k = 0,
a stad juz
([Ψ]− ki [Φ]) k = 0, i = 1, 2. ¤
Definicja 8.4.
Lini a krzywiznow a na powierzchni S nazywamy krzyw a na S , która w ka zdym swoim
punkcie jest styczna do kierunku g ł ównego.
Z powyzszej definicji wynika, ze linia krzywiznowa zawsze "podaza" w kierunku ek-
stremalnego zakrzywienia powierzchni.
Przykład 8.2.
Zastosujemy wzory podane w Twierdzeniu 8.4. do obliczenia krzywizn głównych i
kierunków głównych oraz przeprowadzimy klasyfikacje punktów i znajdziemy linie krzy-
wiznowe walca o promieniu r i osi Oz, w parametryzacji
f (u, v) = (r cos v, r sin v, u) , v ∈ (0, π) , u ∈ R.
Wyznaczamy najpierw macierze współczynników pierwszej i drugiej formy kwadratowej
w podanej parametryzacji
f 0u(u, v) = (0, 0, 1) ,
f 0v(u, v) = (−r sin v, r cos v, 0) ,
E (u, v) = f 0u(u, v) · f
0u(u, v) = 1,
53

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 54/7
F (u, v) = f 0u(u, v) · f 0v(u, v) = 0,
F (u, v) = f 0v(u, v) · f 0v(u, v) = r2,
[Φ] =
"1 0
0 r2
#,
det[Φ] = r2f 00uu(u, v) = (0, 0, 0) ,
f 00uv(u, v) = (0, 0, 0) ,
f 00vv(u, v) = (−r cos v,−r sin v, 0),
(f 0u(u, v) · f 0v(u, v) · f 00uu(u, v)) = 0,
(f 0u(u, v) · f 0v(u, v) · f 00uv(u, v)) = 0,
(f 0u(u, v) · f 0v(u, v) · f 00uv(u, v)) = r2
l(u, v) = (f 0u(u,v)·f 0v(u,v)·f 00uu(u,v))√ det[Φ]
= 0,
m(u, v) =
(f 0u(u,v)·f 0v(u,v)·f 00uv(u,v))
√ det[Φ] = 0,m(u, v) = (f 0u(u,v)·f 0v(u,v)·f 00vv(u,v))√
det[Φ]= r,
[Ψ] =
"0 0
0 r
#.
Równanie na krzywizny główne ma postac
det
Ã"0 0
0 r
#− k
"1 0
0 r2
#!= 0,
czyli
kr (kr−
1) = 0.
Krzywizny główne sa wiec równe
k1 = 0, k2 = 1r
.
Widzimy, ze kazdy punkt walca jest punktem parabolicznym.
Równanie na kierunek główny k1 = f 0uu01 + f 0vv0
1 odpowiadajacy krzywiznie głównej k1 = 0
ma postac ""0 0
0 r
#− 0
"1 0
0 r2
##"u01
v01
#=
"0
0
#.
Jego rozwiazaniem jest u01 6= 0, v0
1 = 0, czyli n.p. k1 = f 0u.
Równanie na kierunek główny k2 = f 0uu
02 + f
0vv
02 odpowiadajacy krzywiznie głównej k1 =
1r
ma postac ""0 0
0 r
#− 1
r
"1 0
0 r2
##"u02
v02
#=
"0
0
#.
Jego rozwiazaniem jest u02 = 0, v0
2 6= 0, czyli n.p. k2 = f 0v.
Linie krzywiznowe maja zatem równania
g1 : u0(t) = 1, v0(t) = 0, wiec g1 : u = t, v = v0 = const,
g2 : u0(t) = 0, v0(t) = 1, wiec g2 : u = u0 = const, v = t.
Sa to po prostu linie współrzednosciowe walca w parametryzacji f.
54

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 55/7
Zauwazmy, ze potwierdziły sie wszystkie wyniki, które bez rachunków otrzymalismy w
Przykładzie 8.1.
Macierz [dN P ] pochodnej kierunkowej dN P : T P S → T P S w punkcie P zalezy oczy-
wiscie od lokalnej parametryzacji f : (u, v) → f (u, v) powierzchni S, gdyz jest zapisana wbazie {f 0u, f 0v} . Wiemy jednak, ze wyznacznik i slad macierzy odwzorowania liniowego nie
zaleza od bazy, w której macierz została zapisana. Pozwala to wprowadzic nastepujace
pojecia.
Definicja 8.4.
Niech S bedzie zorientowan a wektorem N regularn a powierzchni a dwustronn a.
• Funkcj e
K : S →
R : P →
K P = det[dN P ] .
nazywamy krzywizn a Gaussa powierzchni S.
• Funkcj e
H : S → R : P → H P = −1
2tr [dN P ] .
nazywamy krzywizn a sredni a powierzchni S.
Uwaga: Wprost z de fi nicji widzimy, ˙ ze przy zmianie orientacj ( −N zamiast N ),
krzywizna Gaussa nie zmieni si e, natomiast krzywizna srednia zmieni znak na przeciwny.
Współczynniki pierwszej i drugiej formy kwadratowej powierzchni potrafimy łatwo
policzyc, albo wrecz z góry mamy je dane, natomiast bez dodatkowych rachunków nie
mamy do dyspozycji jawnej postaci macierzy [dN ] . Dlatego bardzo przydatne sa wzory
podane w kolejnych twierdzeniach.
Twierdzenie 8.5.
• Krzywizna Gaussa jest równa iloczynowi krzywizn g ł ównych
K = k1k2.
•• Krzywizna srednia jest równa sredniej arytmetycznej krzywizn g ł ównych
H =k1 + k2
2.
Dowód: W kazdym punkcie P ∈ S, w szczególnej bazie przestrzeni stycznej T P S,
jaka jest baza ortonormalna©
k1P , k2P
ªzłozona z jednostkowych wektorów o kierunkach
głównych, macierz [dN P ] ma postac diagonalna, z wartosciami własnymi odpowiadajacymi
wektorom bazy na przekatnej
[dN P ] = " −k1P 0
0 −k2P # .
55

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 56/7
Zatem w kazdej bazie przestrzeni stycznej mamy
• K P = det [dN P ] = k1P k2P , oraz
•• H P = −12
tr[dN P ] =k1P +k2P
2. ¤
Krzywizne Gaussa i krzywizne srednia mozna równiez wyrazic bezposrednio za pomocawspółczynników pierwszej i drugiej formy kwadratowej.
Twierdzenie 8.6.
• Krzywizna Gaussa jest równa ilorazowi wyznaczników macierzy drugiej i pierwszej
formy kwadratowej
K =det[Ψ]
det[Φ].
•• Krzywizna srednia jest równa
H =1
2
Gl− 2F m + En
det[Φ].
Dowód: Oba wzory wynikaja z zaleznosci [Ψ] = [Φ] [−dN ] .
• Mamy
det[Ψ] = det ([Φ] [−dN ]) = det [Φ]det[−dN ] = det [Φ]det[−dN ] = det [Φ]det[dN ] ,
skad juz dostajemy wzór pierwszy.
•• Aby udowodnic drugi wzór musimy efektywnie znalezc macierz [dN ] wykorzystujac
macierz odwrotna do macierzy pierwszej formy kwadratowej.
[dN ] = − [Φ]−1 [Ψ] =
= −"
E F
F G
#−1 "l m
m n
#=
=−1
det[Φ]
"G −F
−F E
#"l m
m n
#=
=−1
det[Φ]
"Gl− F m Gm− F n
mE
−F l nE
−F m
#.
Zatem
H = −1
2tr [dN ] =
1
2
Gl− 2F m + En
det[Φ]. ¤
Mamy jeszcze jeden wzór, który podaje zaleznosc miedzy krzywizna Gaussa, krzywizna
srednia i krzywiznami głównymi.
56

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 57/7
Twierdzenie 8.7.
Niech K i H bed a odpowiednio krzywizn a Gaussa i krzywizn a sredni a powierzchni S.
Wtedy krzywizny g ł ówne k1, k2 powierzchni S s a pierwiatkami równania kwadratowego
k2
−2Hk + K = 0.
Dowód: Przez podstawienie widzimy, ze równanie k2−(k1 + k2) k+k1k2 = 0 spełniaja
zarówno k1, jak i k2. ¤
Wniosek 8.2.
W typowych zadaniach dotycz acych powierzchni, gdy mamy ju z wyznaczone (albo dane
z góry) pierwsz a i drug a form e kwadratow a i nale zy obliczy c krzywizny g ł ówne k1, k2,
kierunki g ł ówne k1, k2, linie krzywiznowe, krzywizn e Gaussa K i krzywizn e ´ sredni a H,
rachunki mo˙ zna poprowadzi c w ró znej kolejno sci na dwa sposoby.
Sposób I:
1) k1, k2 obliczamy jako pierwiastki równania kwadratowego
det ([Ψ]− k [Φ]) = 0.
2) k1, k2 obliczamy z równa n
([Ψ]− ki [Φ]) ki = 0, i = 1, 2
przyjmuj ac ki = f 0uu0i + f 0vv0
i.
3) linie krzywiznowe obliczamy ca ł kuj ac równania dui = u0idt, dvi = v0idt, i = 1, 2.
4) K i H obliczamy ze wzorów
K = k1k2,
H =k1 + k2
2.
Sposób II:
1) K i H obliczamy ze wzorów
K =
det[Ψ]
det[Φ] ,
H =1
2
Gl− 2F m + En
det[Φ].
2) k1, k2 obliczamy jako pierwiastki równania kwadratowego
k2 − 2Hk + K = 0.
3) k1, k2 obliczamy z równa n
([Ψ]
−ki [Φ]) ki = 0, i = 1, 2
przyjmuj a c ki = f 0uu0i + f 0vv0
i.
57

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 58/7
4) linie krzywiznowe obliczamy ca ł kuj ac równania dui = u0idt, dvi = v0
idt, i = 1, 2.
Krzywizna Gaussa i krzywizna srednia odgrywaja bardzo wazna role w zaawansowanych
badaniach własnosci powierzchni. Jako ciekawostki, podajemy kilka faktów
• W R3 istnieja tylko cztery istotnie rózne powierzchnie o stałej krzywiznie Gaussa.Sa to:
- płaszczyzna, K = 0,
- powierzchnia walcowa, K = 0,
- sfera, K = const > 0,
- pseudosfera, K = const < 0.
Pseudosfera
• Krzywizna Gaussa nie zmienia sie podczas wyginania powierzchni niezmieniajacego
długosci lezacej na niej krzywych. Np. przy zwijaniu płaszczyzny na walec krzywizna
Gaussa pozostaje zerowa.
• Powierzchnie o stałej zerowej krzywiznie sredniej nazywamy powierzchniami mini-
malnymi. Jesli na takiej powierzchni lezy jakas krzywa (niekoniecznie płaska), to wykonu-
jac jej kopie z drutu i rozpinajac na niej membrane o najmniejszym polu powierzchni, (np.
błone mydlana), otrzymamy własnie te powierzchnie, z której ta krzywa była wyjeta.
Na powierzchniach moga istniec kierunki, w którym krzywizna normalna zeruje sie.
Definicja 8.5.
• Je sli w punkcie na powierzchni istnieje kierunek, w którym krzywizna normalna
zeruje si e, to taki kierunek nazywamy kierunkiem asymptotycznym w tym punkcie.
• Krzyw a na powierzchni, której styczna w ka zdym jej punkcie ma kierunek asympto-
tyczny, nazywamy lini a asymptotyczn a.
Przykłady 8.3.
• W kazdym punkcie walca, kierunek równoległy do osi walca jest kierunkiem as-
ymptotycznym, bo w tym kierunku przekroje normalne sa prostymi, wiec krzywizna nor-
58

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 59/7
malna zeruje sie. Jest to jedyny kierunek asmptotyczny, bo przekroje normalne w innych
kierunkach sa elipsami lub okregiem Liniami asymptotycznymi na walcu sa zatem proste
równoległe do osi walca.
• Na płaszczyznie kazdy kierunek jest asymtotyczny i w konsekwencji kazda krzywa
jest linia asymptotyczna.• Na sferze i na kazdej innej powierzchni o krzywiznie Gaussa dodatniej, w zadnym
punkcie nie istnieja kierunki asymptotyczne, bo ekstrema krzywizny normalnej sa tego
samego znaku, wiec krzywizna normalna nie zeruje sie.
• W punktach hiperbolicznych dowolnej powierzchni istnieja dwa kierunki asymtoty-
czne, bo krzywizna normalna, jako ciagła funkcja kierunku, przemierzajac od wartosci
ujemnej do dodatniej i ponownie do ujemnej, dwukrotnie musi si e zerowac.
Twierdzenie 8.8.
• Kierunki asymptotyczne k = f 0uu0 + f 0vv0 okre sla równanie
Ψ¡
k¢
= 0, czyli
l (u0)2
+ 2mu0v0 + n (v0)2
= 0.
• Linie asymptotyczne okre slone s a równaniami du = u0dt, dv = v0dt, gdzie u0 i v0 s a
rozwi azaniami powy zszego równania.
Dowód: Wystarczy przypomniec, ze kn
¡k
¢= Ψ
µk
|k|
¶= 1
|k|2Ψ
¡k
¢. ¤
59

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 60/7
Literatura uzupełniajaca
A. Literatura w jezyku polskim:
[1]. M. Biernacki, Geometria ró zniczkowa , I i II, PWN, Warszawa 1954/55.
[2]. C. Bowszyc, J. Konarski, Wst ep do geometrii ró zniczkowe j, Wydawnictwa Uniw-
ersytetu Warszawskiego, Warszawa, 2007.[3]. J. Gancarzewicz, B. Opozda, Wst ep do geometrii ró zniczkowe j, Wyd. UJ, Kraków
2003.
[4]. B. Gdowski, Elementy geometrii ró zniczkowej z zadaniami , PWN, Warszawa 1982.
[5]. A. Goetz, Geometria ró zniczkowa , PWN, Warszawa 1965.
[6]. O. Karwowski, Zbiór zada n z geometrii ró zniczkowej , WNT, Warszawa, 1973.
[7]. J. Oprea, Geometria ró zniczkowa i jej zastosowania , PWN, Warszawa 2002.
B. Literatura w jezyku angielskim:
[8]. M. do Carmo, Di ff erential Geometry of Curves and Surfaces , Prentice Hall, 1986.
Pomocne darmowe programy komputerowe
• GeoGebra, program dostepny na stronie http://www.geogebra.org
• 3D-XplorMath-J, program dostepny na stronie http://3d-xplormath.org
60

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 61/7
Czesc II Zestaw zadan
1. Wykazac, ze dwie rózne krzywe sparametryzowane f i g parametryzuja te sama
krzywa geometryczna. Wyznaczyc reparametryzacje ϕ : (τ 1, τ 2) → (t1, t2) , taka, zeg (τ ) = f (ϕ (τ )) , τ ∈ (τ 1, τ 2) :
a) f : R → R2, f (t) = (t, t) ,
g : R → R2, g (τ ) = (τ 3, τ 3) .
b) f : (0, 2π) → R2, f (t) = (r cos t, r sin t) ,
g : (0, 2πr) → R2, g (τ ) =¡
r cos τ r
, r sin τ r
¢.
c) f : (−π, π) → R2, f (t) = (r cos t, r sin t) ,
g : R → R2, g (τ ) =³
r 1−τ 2
1+τ 2, r 2τ
1+τ 2
´. [wsk. τ = tg t
2].
d) f : R
→R2, f (t) = (a cosh t, b sinh t) ,
g : R → R2, g (τ ) = ³a1+τ 21−τ 2 , b 2τ
1−τ 2´ . [wsk. τ = tgh t2 ].
2. Wyznaczyc dowolne parametryzacje nastepujacych krzywych geometrycznych:
a) Prostej w R2 przechodzacej przez punkt A = (a, b) i równoległej do wektora
v = ( p,q ) ;
b) Okregu w R2 o srodku S = (0, 0) i promieniu r, tak by f (0) = (r, 0), zas ruch
odbywał sie w kierunku przeciwnym do ruchu wskazówek zegara;
c) Okregu w R2 o srodku S = (0, 0) i promieniu r, tak by f (0) = (0, r), zas ruch
odbywał
sie w kierunku zgodnym z ruchem wskazówek zegara ;d) Okregu w R2 o srodku S = ( p,q ) i promieniu r ;
e) Elipsy w R2 o srodku S = ( p,q ) i półosiach a i b ;
f) Hiperboli w R2 o równaniu x2
a2− y2
b2= 1 ;
g) Paraboli w R2 o równaniu y2 = 2 px. [odp.: f (t) = (2 pt2, 2 pt) ] ;
h) Cykloidy w R2 powstałej jako droga, po której porusza sie ustalony punkt okregu
o promieniu r toczacego sie po osi Ox. [odp.: f (t) = (r(t− sin t), r(1− cos t)) ] ;
i) Linii srubowej w R3 powstałej jako droga, po której porusza sie punkt obracajacy sie
dookoła osi Oz w odległosci a od niej i jednoczesnie przesuwajacy sie ze stała predkoscia
b w kierunku tej prostej. [odp.: f (t) = (a cos t, a sin t,bt) ] ; j) Wykresu funkcji rózniczkowalnej F : (a, b) → R : x → y = F (x) .
3. Niech P 0, P 1, P 2, P 3 beda dowolnymi punktami w R2 lub w R3.
Wielomianowa krzywa domknieta o parametryzacji:
P (t) = (1− t)2P 0 + 2(1− t)tP 1 + t2P 2, t ∈ h0, 1i
nazywamy segmentem parabolicznym Béziera z punktami kontrolnymi P 0, P 1, P 2,
61

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 62/7
natomiast wielomianowa krzywa domknieta o parametryzacji:
P (t) = (1− t)3P 0 + 3(1− t)2tP 1 + 3(1− t)t2P 2 + t3P 3, t ∈ h0, 1i
nazywamy segmentem kubicznym Béziera z punktami kontrolnymi P 0, P 1, P 2, P 3.
a) Wyznaczyc konce segmentów Béziera.
b) Obliczyc wektory predkosci i przyspieszenia na koncach segmentów.
c) Sprawdzic otrzymane wyniki w GeoGebrze.
d) Wykorzystujac GeoGebre, eksperymentalnie znalezc inne własnosci segmentów
Béziera przydatne przy wykonywaniu rysunków za pomoca tych krzywych.
4. O krzywej f wiadomo, ze f 00
(t) = 0, dla wszystkich t. Jaka to krzywa?
5. Pokazac, ze jesli krzywa sparametryzowana f : I → R3
jest klasy C 1
i speł-nia warunek |f (t)| = c, (c = const 6= 0), to wektor f 0(t) jest prostopadły do wektora
wodzacego f (t) dla wszystkich t ∈ I.
6. Wyznaczyc parametryzacje naturalne nastepujacych krzywych sparametryzowanych.
a) f (t) = (et,√
2t, e−t); [odp: s = 2sinh t]
b) f (t) = (t,at + b);
c) f (t) = (t, a cosh ta
); [odp: s = a sinh ta
]
d) f (t) = (a cos t, a sin t,bt);
e) f (t) = (t,√ 2 ln t, 1t
); [odp: s = −1t
+ t].
7. Na jaka trudnosc napotkamy próbujac wyznaczyc parametryzacje naturalna elipsy?
8. Dla krzywej sparametryzowanej f (t) = (r(t− sin t), r(1 − cos t)) [parametryzacja
cykloidy], wyznaczyc punkty osobliwe i obliczyc długosc łuku miedzy kolejnymi dwoma
punktami osobliwymi.
9. Obliczyc krzywizne zorientowana krzywej sparametryzowanej w R2
, a nastepniewyznaczyc jej ekstrema:
a) f (t) = (1 + t, 1− t);
b) f (t) = (t, t2); g(t) = (−t, t2);
c) f (t) = (t, t3); g(t) = (t,sgnt · t2);
d) f (t) = (t, cosh t);
e) f (t) = (r cos t, r sin t);
f) f (t) = (a cos t, b sin t);
g) f (t) = (t
−sin t, 1
−cos t);
h) f (t) = (t2, t3).
62

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 63/7
10. Dla linii srubowej w R3 danej parametryzacja f (t) = (a cos t, a sin t,bt)
a) wyznaczyc parametryzacje naturalna;
b) wyznaczyc wektory reperu Freneta {T , N , B} oraz obliczyc krzywizne i skrecenie
na dwa sposoby, wykorzystujac parametryzacje:1) podana, 2) naturalna;
c) zapisac wzory Freneta w parametryzacji naturalnej i sprawdzic ich poprawnosc;
d) pokazac,ze prosta styczna w dowolnym punkcie krzywej tworzy z osia Oz zawsze
taki sam kat, zas prosta normalna przecina os Oz pod katem prostym.
11. Analizujac stosowne wzory zbadac, jak zmieniaja sie wektory reperu Freneta,
krzywizna i skrecenie przy zmianie orientacji krzywej sparametryzowanej.
12. Pokazac,ze krzywa sparametryzowana f (t) = (1 + 3t + 2t2, 2 − 2t + 5t2, 1 − t2)
jest krzywa płaska i podac równanie płaszczyzny, w której zawiera sie ta krzywa. Uogól-
nic ten przykład dowodzac, ze kazda krzywa sparametryzowana f (t) = (x(t), y(t), z (t)),
gdzie x(t), y(t), z (t) sa wielomianami zmiennej t stopnia co najwyzej drugiego, jest krzywa
płaska.
13. Udowodnic, ze krzywa sparametryzowana
f (t) =
³√ 34 sin t + 1
2 cos t + 12 ,−1
4 sin t +√ 32 cos t +
√ 32 ,
√ 32 sin t
´:
a) jest sparametryzowana naturalnie;b) lezy w płaszczyznie 3x−
√ 3y − 2z = 0;
c) jest okregiem;
Wyznaczc promien i srodek tego okregu.
14. Udowodnic, ze krzywa okreslona parametryzacja f (t) = (cos t, sin t, sin t) jest
płaska i znalezc równanie płaszczyzny, w której lezy ta krzywa.
15. Udowodnic, ze krzywa okreslona parametryzacja f (t) = (45
cos t, 1−
sin t,
−35
cos t)
jest okregiem. Wyznaczyc promien i srodek tego okregu oraz równanie płaszczyzny, w
której lezy okrag.
16. Dana jest krzywa sparametryzowana f (t) = (a cos t, a sin t, g(t)) . Wyznaczyc
postac funkcji g(t), jezeli wiadomo, ze krzywa jest płaska.
17. Obliczyc krzywizne krzywej sparametryzowanej f (t) = (t cos s, t sin t,at) i pokazac,
ze krzywa ta lezy na stozku.
63

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 64/7
18. Obliczyc, dla jakich wartosci parametrów a i b krzywizna i skrecenie krzywej
sparametryzowanej f (t) = (a cosh t, a sinh t,bt) sa sobie równe.
19. Wyznaczyc parametryzacje naturalna, a nastepnie obliczyc krzywizne i skrecenie
nastepujacych krzywych sparametryzowanych:a) f (t) = (a cosh t, a sinh t,at);
b) g(t) = (at,a√
2 ln t, at
).
20. Wyznaczyc wektory reperu Freneta oraz obliczyc krzywizne i skrecenie nastepu-
jacych krzywych sparametryzowanych [zdecydowac, czy warto wyznaczac parametryzacje
naturalna]:
a) f (t) = (et, e−t, t√
2);
b) f (t) = (2t, ln t, t2);
c) f (t) = (t cos t, t sin t, t);
d) f (t) = (et cos t, et sin t, et);
e) f (t) = (t, t2, t3).
21. Wyznaczyc miejsce geometryczne srodków okregów scisle stycznych nastepujacych
krzywych sparametryzowanych:
a) f (t) = (t, sin t);
b) f (t) = (r(t− sin t), r(1− cos t));
c) f (t) = (r cos t, r sin t);d) f (t) = (t, t2).
22. Zapisac równania płaszczyzn:
a) scisle stycznej, b) normalnej, c) prostujacej
w dowolnym punkcie linii srubowej f (t) = (a cos t, a sin t,bt).
23. Stosujac odpowiednie twierdzenie o funkcji uwikłanej wykazac, ze nastepujace
równania postaci F (x, y) = c, (c = const) przedstawiaja krzywe regularne w R2 :
a) ax + by = c, (a2 + b2 > 0); b) x2 + y2 = 1;
c) xy = 1; . d) y = x2.
Rozwikłac te równania do postaci y = y(x) i x = x(y). Wskazac punkty, w których
równanie da sie rozwikłac tylko w jeden sposób. Sprawdzic, ze gradient grad F jest wek-
torem prostopadłym do tych krzywych.
24. Wyznaczyc obwiednie nastepujacych jednoparametrowych rodzin krzywych w R2.
Wykonac rysunki w GeoGebrze i sprawdzic wyniki wykorzystujac animacje.
a) F (x,y,t) = 2tx− y −t2
2 = 0;
64

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 65/7
b) F (x,y,t) = (x− t)2 + y2 − 1 = 0;
c) F (x,y,t) =¡
x− 32
t¢2
+ y2 − t2 = 0;
d) F (x,y,t) = x2
t2+ y2
(1−t)2− 1 = 0, t ∈ (0, 1) ;
e) F (x,y,t) = (x− cos t)cos t + (y − sin t)sin t = 0;
25. Wykazac, ze
a) Prosta styczna do krzywej geometrycznej C w R2 sparametryzowanej parametryza-
cja f : t → f (t), w punkcie f (t0) ma równanie N (t0) · (X − f (t0)) = 0, gdzie X ∈ R2.
b) Obwiednia jednoparametrowej rodziny stycznych F (X, t) = N (t) · (X − f (t)) = 0
do krzywej C sparametryzowanej parametryzacja f : t → f (t) jest krzywa C : X = f (t).
26. Pokazac, ze odwzorowanie
f : R2
⊃D→
S ⊂
R3
f (u, v) = (r cos u cos v, r cos u sin v, r sin u),
gdzie D =©
(u, v) ∈ R2, −π2
< u < π2
,−π < v < πª
, jest lokalna parametryzacja sfery
S : x2 + y2 + z 2 = r2, [tzw. parametryzacja geograficzna] i zbadac regularnosc tej
parametryzacji.
Podac interpretacje parametrów u i v. Które punkty sfery nie sa pokryte ta parame-
tryzacja?
Podac przykład analogicznej parametryzacji innego obszaru sfery S.
Odwołujac sie do odpowiedniego twierdzenia z topologii uzasadnic, ze całej sfery nie
da sie pokryc jedna parametryzacja.
27. Pokazac,ze nastepujace funkcje sa lokalnymi parametryzacjami paraboloidy hiper-
bolicznej S : z = x2 − y2 :
a) f (u, v) = (u + v, u− v, 4uv) ;
b) f (u, v) = (u cosh v, u sinh v, u2).
28. Znalezc parametryzacje regularna walca S : x2 + y2 = r2.
29. Znalezc parametryzacje wykresu funkcji z = F (x, y) okreslonej na obszarze
D ⊂ R2 i zbadac regularnosc tej parametryzacji.
30. Wyznaczyc parametryzacje powierzchni srubowej jezeli wiadomo, ze jest ona
utworzona przez proste przecinajace linie srubowa g(t) = (a cos t, a sin t,bt) i os Oz pod
katem prostym.
31. Wyznaczyc parametryzacje powierzchni obrotowej otrzymanej przez obrót krzy-
wej płaskiej g(t) = (x(t), 0, z (t)) w R3
dookoła osi Oz. Znalezc warunki regularnosci
65

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 66/7
tej parametryzacji i podac ich interpretacje geometryczna. Wyznaczyc równania linii
współrzednosciowych.
32. Wyznaczyc parametryzacje torusa powstałego jako powierzchnia obrotowa przez
obrót okregu g(t) = (a + r cos t, 0, r sin t), gdzie 0 < r < a.[odp: f (u, v) = ((a + r cos u)cos v, (a + r cos u)sin v, r sin u) , 0 < u < 2π, 0 < v < 2π]
Sprawdzic, ze ten torus jest opisany równaniem ogólnym
z 2 +³p
x2 + y2 − a´2
− r2 = 0.
33. Stosujac odpowiednie twierdzenie o funkcji uwikłanej wykazac, ze sfera o równaniu
S : x2 + y2 + z 2 = r2, (r > 0), jest powierzchnia regularna i rozwikłac jej równanie do
postaci z = z (x, y) .
34. Wykazac, ze hiperboloida jednopowłokowa S : x2 + y2 − z 2 = 1 jest powierzchnia
regularna i znalezc jej dowolna parametryzacje.
35. Wykazac, ze stozek o równaniu S : x2+y2−z 2 = 0 nie jest powierzchnia regularna
i wyznaczyc punkty nieregularnosci.
36. Pokazac, ze sfera S : x2 + y2 + z 2 = r2 da sie pokryc wykresami funkcji postaci
g(u, v) = (u,v,√
1− u2 − v2).
37. Wyznaczyc płaszczyzne styczna do sfery S : x2 + y2 + z 2 = 1 w punkcie
p = (x0, y0, z 0) na dwa sposoby:
a) wykorzystujac gradient funkcji F (x,y,z ) = x2 + y2 + z 2 − 1;
b) wykorzystujac parametryzacje sfery f (u, v) = (cos u cos v, cos u sin v, sin u).
38. Wyznaczyc pierwsza forme kwadratowa powierzchni okreslonych podanymi para-
metryzacjami.
a) płaszczyzna w R3 przechodzaca przez punkt p i rozpieta przez wektory w1 i w2,
f (u, v) = p + uw1 + vw2, gdzie |w1| = |w2| = 1 i w1 ⊥ w2.
b) walec S : x2 + y2 = 1,
f (u, v) = (cos u, sin u, v).
c) powierzchnia srubowa
f (u, v) = (u cos v, u sin v, v).
d) sfera o promieniu r, S : x2 + y2 + z 2 = r2,
f (u, v) = (r cos u cos v, r cos u sin v, r sin u).
e) wykres funkcji rózniczkowalnej z = g(x, y),
f (u, v) = (u,v,g(u, v)).
66

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 67/7
39. Obliczyc długosc łuku krzywej g(t) = (f (h(t)) na powierzchni srubowej danej
parametryzacja f (u, v) = (u cos v, u sin v, v), dla h(t) = (t, 0) oraz dla h(t) = (0, t), przy
t ∈ ht0, t1i . Rozwiazac to zadanie na dwa sposoby:
a) bez korzystania z pierwszej formy kwadratowej.b) wykorzystujac pierwsza forme kwadratowa.
40. Wyznaczyc długosc łuku krzywej o równaniu u = v na powierzchni, której pierwsza
forma kwadratowa ma postac Φ = du2 + sinh2 udv2 , przyjmujac punkt u = v = 0 za
poczatek krzywej.
41. Pod jakim katem przecinaja sie krzywe u−v = 0 i u+v = 0 lezace na powierzchni,
której pierwsza forma kwadratowa ma postac Φ = du2 + (a2 + u2) dv2 ?
42. Obliczyc pole podanego obszaru na powierzchni okreslonej dana parametryzacja:
a) f (u, v) = (r cos u cos v, r cos u sin v, r sin u), 0 < u < π, 0 < v < 2π, (górna półsfera
sfery o promieniu r).
b) f (u, v) = (u cosh v, u sinh v, u2), 0 < u <√
2, 0 < v < 2π, (fragment paraboloidy
hiperbolicznej S : z = x2 − y2).
43. Obliczyc pole powierzchni całego torusa, wykorzystujac jego parametryzacje
f (u, v) = ((a + r cos u)cos v, (a + r cos u)sin v, r sin u) , 0 < u < 2π, 0 < v < 2π,0 < r < a, która pokrywa torus bez dwóch okregów (tzn. bez zbioru o zerowym polu).
44. Wykorzystujac podany wzór na pole obszaru powierzchni sparametryzowanej
wykazac, ze pole obszaru D na powierzchni bedacej wykresem funkcji z = ϕ(x, y) wyraza
sie wzorem
P (D) =
ZZ E
q 1 + (ϕ0
x)2 +¡
ϕ0y
¢2dxdy, gdzie E jest rzutem prostopadłym obszaru D
na płaszczyzne 0xy.
45. Wyznaczyc parametryzacje sfery S : x2 + y2 + (z − 1)2 = 1, za pomoca rzutu
stereograficznego zilustrowanego na rysunku.
[odp: f (u, v) =
µ4u
u2+v2+4, 4v
u2+v2+4,2(u2+v2)u2+v2+4
¶].
67
5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 68/7
Rzut stereograficzny
46. Wyznaczyc pierwsza forme kwadratowa płaszczyzny 0xy w R3 w parametryzacji
biegunowej f (r, ϕ) = (r cos ϕ, r sin ϕ, 0).
47. Wykazac, ze pola obszarów powierzchni S 1 : 2az = x2+y2 i S 2 : az = xy rzutujace
sie na ten sam obszar na płaszczyznie Oxy sa sobie równe.
48. Wyznaczyc pierwsza i druga forme kwadratowa, krzywizne Gaussa, krzywizne
srednia i krzywizny główne powierzchni okreslonych podanymi parametryzacjami:
a) płaszczyzna Oxy w R3 :
f (u, v) = (u,v, 0).
b) sfera o promieniu r :
f (u, v) = (r cos u cos v, r cos u sin v, r sin u).
c) powierzchnia srubowa :
f (u, v) = (u cos v, u sin v,av).
d) walec o promieniu r :
f (u, v) = (r cos u, r sin u, v).
e) torus :f (u, v) = ((a + r cos u)cos v, (a + r cos u)sin v, r sin u) , 0 < r < a.
f) wykres funkcji rózniczkowalnej z = ϕ(x, y) :
f (u, v) = (u,v,ϕ(u, v)).
g) powierzchnia obrotowa o regularnej tworzacej g(t) = (x(t), 0, z (t)) :
f (u, v) = (x(u)cos v, x(u)sin v, z (u)).
Podac klasyfikacje punktów tych powierzchni.
68

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 69/7
49. Pokazac, ze punkt (u, v) = (0, 0) na powierzchni sparametryzowanej f (u, v) =
(u,v,u3 − 3uv2) jest punktem spłaszczenia, tzn. k1 = k2 = 0. [wsk. obliczyc k1 i k2 z
równania det([Ψ]− k [Φ]) = 0].
50. Wyznaczyc kierunki asymptotyczne i linie asymptotyczne:a) powierzchni srubowej danej parametryzacja f (u, v) = (u cos v, u sin v, v);
b) walca danego parametryzacja f (u, v) = (r cos u, r sin u, v).
51. Wyznaczyc kierunki główne i linie krzywiznowe:
a) walca danego parametryzacja f (u, v) = (r cos u, r sin u, v);
b) powierzchni bedacej wykresem funkcji z = ϕ(x, y) = xy.
52. Dla powierzchni , krórej pierwsza i druga forma kwadratowa maja odpowiednio
postacΦ = du2+dv2,Ψ = du2−dv2 obliczyc kierunki asymptotyczne i linie asymptotyczne
oraz kierunki główne i linie krzywiznowe.
69

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 70/7
Czesc III Wybrane wzory
¥ Funkcje hiperboliczne
sinh t =
et
−e−t
2 , cosh t =
et + e−t
2 ,cosh2 t− sinh2 t = 1, cosh t + sinh t = et, cosh t− sinh t = e−t
(sinh t)0 = cosh t, (cosh t)0 = sinh t.
¥ Krzywa sparametryzowana w Rn, (n = 2, 3)
f : I → Rn : t → f (t), I - przedział w R
(w R2) f (t) = (x(t), y(t)); (w R3) f (t) = (x(t), y(t), z (t)).
¥ Wektor predkosci krzywej sparametryzowanej f : t → f (t)
(w R2) f 0 = (x0, y0);
(w R3) f 0 = (x0, y0, z 0).
¥ Predkosc (szybkosc) krzywej sparametryzowanej f : t → f (t)
(w R2) |f 0| =
q (x0)2 + (y0)2;
(w R3) |f 0| = q (x0)2 + (y0)2 + (z 0)2.
¥ Wektor przyspieszenia krzywej sparametryzowanej f : t → f (t)
(w R2) f 00 = (x00, y00);
(w R3) f 00 = (x00, y00, z 00).
¥ Przyspieszenie krzywej sparametryzowanej f : t → f (t)
(w R2) |f 00| =
q (x00)2 + (y00)2;
(w R3) |f 00| = q (x00)2 + (y00)2 + (z 00)2.
¥ Regularnosc krzywej sparametryzowanej f : t → f (t)
f 0 6= 0, [czyli |f 0| 6= 0 ] .
¥ Długosc łuku krzywej sparametryzowanej f : I → Rn : t → f (t) miedzy punktami
f (a) i f (b), gdzie ha, bi ⊂ I
d =
b
Z a
|f 0| dt.
70

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 71/7
¥ Parametr naturalny (długosc łuku) krzywej sparametryzowanej
f : I → Rn : t → f (t), mierzony od a ∈ I
s = s(t) =
t
Z a
|f 0| dτ .
¥ Zmiana dowolnej parametryzacji krzywej regularnej f : t → f (t)
na parametryzacje naturalna g : s → g(s):
s = s(t) ⇒ t = t(s) ⇒ g : s → g(s) = f (t(s)).
¥ Warunek konieczny i wystarczajacy na to, by parametryzacja f : s → f (s)
krzywej regularnej była parametryzacja naturalna
|f 0(s)| = 1.
¥ Wektory reperu Freneta {T (s), N (s)} krzywej w R2 sparametryzowanej parametry-
zacja naturalna f : s → f (s)
T = f 0
N =f 00
|f 00|.
¥Krzywizna krzywej w R2 sparametryzowanej parametryzacja naturalna f : s
→f (s)
k = |f 00|
¥ Równania Freneta krzywej w R2 w parametryzacji naturalnej f : s → f (s)
T = f 0
T 0 = kN
N 0 = −kT.
¥ Wektory zorientowanego reperu Freneta {T (s), N z(s)} krzywej w R2
sparametry-zowanej parametryzacja naturalna f : s → f (s)
T = f 0
N z = Cross(f 0), gdzie Cross(x, y) := (−y, x).
¥ Krzywizna zorientowana krzywej w R2 sparametryzowanej parametryzacja
naturalna f : s → f (s)
kz = f 00 · Cross(f 0), gdzie Cross(x, y) := (−
y, x).
71

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 72/7
¥ Krzywizna zorientowana krzywej w R2 sparametryzowanej dowolna parametryzacja
regularna f : t → f (t) = (x(t), y(t))
kz =f 00 · Cross(f 0)
|f 0|3=
x0y00 − x00y0
¡(x0
)
2
+ (y0
)
2¢ 3
2
.
¥ Krzywizna krzywej w R2 sparametryzowanej dowolna parametryzacja regularna
f : t → f (t) = (x(t), y(t))
k = |kz| =|f 00 · Cross(f 0)|
|f 0|3=
|x0y00 − x00y0|¡(x0)2 + (y0)2
¢ 3
2
.
¥ Wektor normalny krzywej w R2 okreslonej równaniem ogólnym F (x, y) = 0
N = grad F = ¡F 0x
, F 0y¢ .
¥ Układ równan, z którego obliczamy równanie obwiedni (jesli takowa istnieje)
jednoparametrowej rodziny krzywch F (x,y,t) = 0 w R2(F = 0
F 0t = 0← rugujemy parametr t.
¥ Wektory reperu Freneta {T (s), N (s), B(s)} krzywej w R3 sparametryzowanej
parametryzacja naturalna f : s → f (s)
T = f 0
N =f 00
|f 00|
B = T × N.
¥ Krzywizna i skrecenie krzywej w R3 sparametryzowanej parametryzacja
naturalna f : s → f (s)
k = |f 00|
τ = −(f 0 · f 00 · f 000)k2
.
¥ Równania Freneta krzywej w R3 w parametryzacji naturalnej f : s → f (s)
T = f 0
T 0 = kN
N 0 = −kT − τ B
B0 = τ N.
72

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 73/7
¥ Wektory reperu Freneta {T (t), N (t), B(t)} krzywej w R3 sparametryzowanej
dowolna parametryzacja regularna f : t → f (t)
T =f 0
|f 0|
B =f 0 × f 00
|f 0 × f 00|
N = B × T.
¥ Krzywizna i skrecenie krzywej w R3 sparametryzowanej dowolna parametryzacja
regularna f : t → f (t)
k =|f 0 × f 00|
|f 0|3
τ = −(f 0
·f 00
·f 000
)|f 0 × f 00|2.
¥ Równania Freneta krzywej w R3 w dowolnej parametryzacji regularnej f : t → f (t)
T =f 0
|f 0|
T 0 = |f 0| kN
N 0 = |f 0| (−kT − τ B)
B0 = |f 0| τ N.
¥ Wektor krzywizny krzywej w Rn sparametryzowanej parametryzacja naturalna
f : s → f (s)
K = f 00 = kN.
¥ Wektor krzywizny krzywej w Rn sparametryzowanej dowolna parametryzacja
regularna f : t → f (t)
K = kN.
¥ Promien krzywizny krzywej w Rn sparametryzowanej dowolna parametryzacja
regularna f : t → f (t)
r =1
k.
¥ Srodek krzywizny krzywej w Rn sparametryzowanej parametryzacja naturalna
f : s → f (s)
S = f + rN = f +f 00
|f 00|2.
¥ Srodek krzywizny krzywej w Rn sparametryzowanej dowolna parametryzacja
regularna f : t
→f (t)
S = f + rN.
73

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 74/7
¥ Powierzchnia sparametryzowana (płat powierzchniowy) w R3
f : U → R3 : (u, v) → f (u, v) = (x(u, v), y(u, v), z (u, v)), U - obszar w R2.
¥ Wektory predkosci linii współrzednosciowych powierzchni sparametryzowanej
f : (u, v) → f (u, v)
f 0u = (x0u, y0
u, z 0u), f 0v = (x0v, y0
v, z 0v).
¥ Warunek regularnosci powierzchni sparametryzowanej f : (u, v) → f (u, v)
f 0u × f 0v 6= 0, [ czyli |f 0u × f 0v| 6= 0 ] .
¥ Współczynniki pierwszej formy kwadratowej powierzchni sparametryzowanej
f : (
u, v) →
f (
u, v)
E = f 0u · f 0u
F = f 0u · f 0v
G = f 0v · f 0v.
¥ Pierwsza forma kwadratowa powierzchni sparametryzowanej f : (u, v) → f (u, v)
Φ = Edu2 + 2Fdudv + Gdv2.
¥ Macierz pierwszej formy kwadratowej powierzchni sparametryzowanejf : (u, v) → f (u, v)
[Φ] =
"E F
F G
#.
¥ Długosc łuku krzywej u = u(t), v = v(t) na powierzchni sparametryzowanej
f : (u, v) → f (u, v), dla t ∈ ha, bi
d =
b
Z a q E (u0)2 + 2F u0v0 + G (v0)2dt.
¥ Kat θ miedzy krzywymi u = u(t), v = v(t) i eu = eu(t), ev = ev(t) na powierzchni
sparametryzowanej f : (u, v) → f (u, v) w ich punkcie przeciecia
cos θ =Eu0eu0 + F (u0ev0 + v0eu0) + Gv0ev0q
E (u0)2 + 2F u0v0 + G (v0)2q
E (eu0)2 + 2F eu0ev0 + G (ev0)2.
74

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 75/7
¥ Pole obszaru powierzchni f : U 3 (u, v) → f (u, v), odpowiadajacego obszarowi
D ⊂ U
P =
ZZ D
|f 0u × f 0v| dudv
=ZZ
D
√ EG − F 2dudv =
=
ZZ D
p det[Φ]dudv.
¥ Wektor normalny regularnej powierzchni sparametryzowanej f : (u, v) → f (u, v)
zorientowanej parametryzacja f
N =
f 0u × f 0v|f 0u × f 0v| .
¥Współczynniki drugiej formy kwadratowej powierzchni regularnej sparametryzowanej
i zorientowanej parametryzacja f : (u, v) → f (u, v)
l =(f 0u · f 0v · f 00uu)
|f 0u × f 0v|=
(f 0u · f 0v · f 00uu)p det[Φ]
m =(f 0u · f 0v · f 00uv)
|f 0u × f 0v|=
(f 0u · f 0v · f 00uv)
p det[Φ]
n = (f
0
u · f
0
v · f
00
vv)|f 0u × f 0v| = (f
0
u · f
0
v · f
00
vv)p det[Φ]
.
¥ Druga forma kwadratowa powierzchni sparametryzowanej f : (u, v) → f (u, v)
Ψ = ldu2 + 2mdudv + ndv2.
¥ Macierz drugiej formy kwadratowej powierzchni sparametryzowanej
[Ψ] = "l m
m n # .
¥ Krzywizna normalna krzywej g(t) = (u(t), v(t)) na regularnej powierzchni
sparametryzowanej f : (u, v) → f (u, v)
kn = Ψ
µg0
|g0|
¶=Ψ(g)
Φ(g0)=
=l(u0)2 + 2mu0v0 + n(v0)2
E (u0)2 + 2F u0v0 + G(v0)2.
75

5/13/2018 Wstep Do Geometrii Rozniczkowej ZRadziszewski - slidepdf.com
http://slidepdf.com/reader/full/wstep-do-geometrii-rozniczkowej-zradziszewski 76/7
¥ Obliczanie krzywizn głównych k1, k2, kierunków głównych k1, k2, linii krzywiz-
nowych, krzywizny Gaussa K i krzywizny sredniej H :
sposób I:
1) k1, k2 obliczamy jako pierwiastki równania kwadratowego
det ([Ψ]− k [Φ]) = 0.
2) k1, k2 obliczamy z równan
([Ψ]− ki [Φ]) ki = 0, i = 1, 2
przyjmujac ki = f 0uu0i + f 0vv0
i.
3) linie krzywiznowe obliczamy całkujac równania dui = u0idt, dvi = v0
idt, i = 1, 2.
4) K i H obliczamy ze wzorów
K = k1k2,
H =k1 + k2
2.
sposób II:
1) K i H obliczamy ze wzorów
K =det[Ψ]
det[Φ],
H = 12
Gl− 2F m + Endet[Φ]
.
2) k1, k2 obliczamy jako pierwiastki równania kwadratowego
k2 − 2Hk + K = 0.
3) k1, k2 obliczamy z równan
([Ψ]− ki [Φ]) ki = 0, i = 1, 2
przyjmujac ki = f 0uu
0i + f
0vv
0i.
4) linie krzywiznowe obliczamy całkujac równania dui = u0idt, dvi = v0
idt, i = 1, 2.
¥ Obliczanie kierunków asymptotycznych i linii asymptotycznych.
1) kierunki asymptotyczne k = f 0uu0 + f 0vv0 obliczamy z równania
l (u0)2
+ 2mu0v0 + n (v0)2
= 0.
2) linie asymptotyczne obliczamy całkujac równania du = u0dt, dv = v0dt.
76





























