Embed Size (px)
Citation preview

8/12/2019 WP Soundbrush 2013
http://slidepdf.com/reader/full/wp-soundbrush-2013 1/8
LMS SoundBrush: a new source identification
technology for stationary noise sources
A Siemens Business
Karl Janssens, Dirk De Weer & Fabio Bianciardi - LMS, A Siemens Business, Interleuvenlaan 68, 3001 Leuven, Belgium
Thomas Søndergaard - G.R.A.S. Sound & Vibration, Skovlytoften 33, DK-2840 Holte, Denmark

8/12/2019 WP Soundbrush 2013
http://slidepdf.com/reader/full/wp-soundbrush-2013 2/82LMS, A Siemens Business | [email protected] | www.lmsintl.com
Continuing legislative pressure and increasing consumer and end user focus on noise pollution continuously stretches the
challenges in acoustic design of products and machinery, their noise sources and the propagation of sound from these
noise sources into the air space around them. This paper presents a new SoundBrush measurement technology for source
investigation, detection and propagation of stationary noise sources. A handheld measurement instrument combines a
position and orientation tracking device on top of which a 3D sound intensity sensor antenna can be mounted. While
moving the probe freely around the test object, the sound field is visualized on-line in 3D. The real-time representation
immediately focuses the measurement on the areas of interest requiring further in-depth analysis. The tool is setup rapidly,
provides an intuitive workflow and shows results in real-time, making it widely applicable in many industrial applications.
This paper explains the working principle and characteristics of SoundBrush and shows some application examples on a
diversity of test objects.
1. SOUNDBRUSH TECHNOLOGY AND OPERATING
PRINCIPLES
Nowadays acoustic investigation and analysis is an increasingly demanding
but important discipline across many industries. This paper presents a new
patented1 SoundBrush measurement technology that visualizes stationary
sound fields in full 3D while measuring.
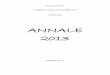
The core of the technology is a handheld measurement instrument shown
in Fig. 1. The measurement instrument combines an on-line position and
orientation tracking system with a 3D sound intensity sensor antenna
which is mounted on top of the device. The measured sound field is
visualized in 3D while moving the probe around the test object.
Fig. 1 - LMS SoundBrush handheld measurement instrument
The 3D sound intensity sensor antenna is a solid sphere with four phase-
matched microphones in tetrahedron configuration. The sensor antenna is
manufactured by G.R.A.S. Sound & Vibration. A picture is shown in Fig. 2.
Fig. 2 - 3D sound intensity probe from G.R.A.S. Sound & Vibration
The 3D position of the SoundBrush probe is measured with an optical
position tracking system. The probe comprises an illuminated sphere with
45 mm diameter which is continuously tracked by a camera. During set-up,
the sphere color is automatically adjusted to provide the highest contrast
with the environment. The 3D orientation of the probe is measured with an
inertial system consisting of accelerometers and gyroscopes.
Typical measurement accuracy is 3-5 cm up to a distance of 1.5 m from
the camera. The workable area is 2.5 by 2 m at 2.5 m distance from the
camera.
The SoundBrush measurement device contains an integrated frontend
for acquisition of data. The system automatically recognizes the acoustic
sensor antenna. Push buttons allow full control of the measurement
process. LEDs provide on-line feedback on hardware status, measurement
levels and position tracking. All functions are combined in an ergonomic,
functional and lightweight design allowing easy handling during themeasurement. A standard USB cable connects the probe with the PC.
The acoustic measurement data is visualized on-line in 3D while brushing
the sound field. Powerful 3D data representations are provided in the
form of point clouds (sound pressure) and intensity vector plots (acoustic
intensity). The sound field is visualized around a 3D geometry model of
the test object. Fig. 3 shows the working principle, while Fig. 4 shows two
illustrative examples. The first example visualizes the measured 3D sound
pressure field in front of a speaker panel, while the second one shows the
intensity vector field of a small electric engine.
4
1
2
3
Fig. 3 - LMS SoundBrush working principle: 1) camera tracks position of
illuminated sphere on measurement probe; 2) embedded gyroscopes and
accelerometers measure orientation of probe; 3) coordinate transformation to
sensor tip; 4) visualization of measured acoustic field
The on-line 3D data visualization allows an immediate and quick
interpretation of the measurement data enabling an efficient acoustic
troubleshooting. All resulting data can be viewed from any possible angle.
One can freely rotate the test object and zoom in on a specific hotspot or
run a section plane through the measurement data to make an interpolated
contour plot. By focusing on the areas of interest, troublesome areas can
be identified that require further in-depth analysis.
Fig. 4 - Two examples of 3D vector intensity field
The key applications are three-fold:
• Sound source localization: understand where the noise comes
from; investigate the main contributors to the noise radiated from
a test object by scanning over the sur face.
• Leak detection: investigate the efficiency of an enclosure toshield from noise sources within or outside the enclosure.
• Sound propagation: investigate how the sources interact and
propagate into the far-field.

8/12/2019 WP Soundbrush 2013
http://slidepdf.com/reader/full/wp-soundbrush-2013 3/83LMS, A Siemens Business | [email protected] | www.lmsintl.com
(3)
(2)
(1)
2. THE 3D TETRAHEDRON SOUND INTENSITY
PROBE
2.1. Tetrahedron microphone configuration
In a close collaboration between LMS International and G.R.A.S. Sound &
Vibrations a 3D sound intensity sensor antenna was developed. It consists
of four phase-matched microphones in tetrahedron configuration mounted
in a rigid sphere with a diameter of 30 mm. The tetrahedron configuration2 is represented schematically in Fig. 5.
Fig. 5 - Tetrahedron configuration
Fig. 6 - Diffraction effect of the solid sphere for a plane wave of 20 kHz
The sound intensity vectors along the x, y and z axes in the local coordinatesystem of the sensor antenna can be calculated from the sound pressure
measurements p1(t), p
2(t), p
3(t) and p
4(t) by using Eqn. (1). The first terms
represent the pressure averaged along the axes; the integral terms
represent the particle velocity; ∆r is the spacer distance between the
microphones considering the presence of the sphere;ro is the air density3.
The frequency domain formulation is given in Eqn. (2), with the cross-
power spectrum between the averaged microphone pressures.
The magnitude of the resulting sound intensity vector can be obtained
using Pythagoras’s theorem. The direction in the global coordinate system
can be reconstructed by applying a roto-translation taking into accountthe 3D orientation (measured with the inertial system) and offset (to the
illuminated sphere) of the sensor antenna.
2.2. Sources of error and correction functions
The i) diffraction effects by the solid sphere, ii) finite difference
approximation of the particle velocity and iii) phase mismatch are three
important sources of error that need to be accounted for when doing
sound intensity measurements with the G.R.A.S. probe.
Diffraction effects
The rigid sphere represents an obstacle to the sound propagation. The
pressure response of the four microphones is influenced by the diffraction
of the sound waves impinging the sphere4. The diffraction effect is depicted
in Fig. 6 for a plane wave of 20 kHz. The influence on the individual
microphone responses depends on the incidence angle of the sound wave.
From this figure one can observe that the microphones facing the origin
of the sound waves experience an increase in sound pressure level, while
the microphones in the ‘shadow’ region are attenuated as a result of the
solid sphere.
An analytical model was developed to study the diffraction effects and
their influence on the sound intensity measurements. The model was used
to simulate the sound pressure for various sound wave incidence angles,
ranging from 0 to 180 degrees in steps of 30 degrees. The diffraction
effects become noticeable from 1 kHz on. The deviations in sound
pressure due to diffraction remain within 2 dB up to 2.5 kHz for all sound
incidence angles. The diffraction effects also introduce phase errors onthe microphone responses which obviously have an impact on the sound
intensity calculation results.
In order to compensate for the diffraction effects, we assume a frequency
dependent spacer distance in the sound intensity calculations, as shown
in Eqn. (3). The frequency profile of is shown in Fig. 7.
Fig. 7 - Frequency dependent spacer distance to correct for diffraction effects
Finite difference approximation error
The finite difference approximation of the particle velocity is another
important source of error5. This type of error also occurs in a traditional
P-P intensity probe with three orthogonal pairs of microphones. However,in the case of the tetrahedron configuration, the finite difference
approximation error is insensitive to the incidence angle of the sound wave
and can therefore be corrected.
The finite difference approximation error of the G.R.A.S. probe and
traditional P-P sound intensity probe was numerically simulated. For
a solid sphere, the decrease in amplitude can be well approximated by
the sinc function in Eqn. (4). For traditional intensity sensors this curve is
orientation dependent and, as a result, cannot be compensated for.
The angle independent finite difference approximation error is a unique
property of the G.R.A.S tetrahedron probe. Because of this property,
the magnitude of the sound intensity vector can be corrected for all
orientations of the probe with the sinc function shown in Fig. 8. This allows
accurate sound intensity measurements in a large frequency range, well
above the upper frequency limit of a traditional probe with the same spacer
distance. Traditionally, the rule of thumb requires the spacer distance to be
less than one sixth of the wavelength6. This restriction in frequency range
no longer holds for the tetrahedron configuration and can be considered
as a great advantage.

8/12/2019 WP Soundbrush 2013
http://slidepdf.com/reader/full/wp-soundbrush-2013 4/8

8/12/2019 WP Soundbrush 2013
http://slidepdf.com/reader/full/wp-soundbrush-2013 5/85LMS, A Siemens Business | [email protected] | www.lmsintl.com
3. APPLICATION EXAMPLES
3.1. Measurement on a car door
In the example, the front passenger door of a car was measured. In the
setup, the car audio system was used as a sound source, playing a simple
wave file containing pink noise. The measurement was done at the outside
of the car, where the front passenger door on the right side of the vehicle
was measured using SoundBrush.Two measurements were done: one with all doors and windows completely
closed and another one where the front right window was opened with 1 cm.
Fig. 12 - Measurement on passenger door, window closed
Fig. 13 - Measurement on passenger door, window 1 cm open
When comparing both measurements (Fig. 12 and 13) the window leak
is clearly visible as a sound source. However, the measurements also
clearly show an effect of acoustic resonance below the car. The speakers
excite the cavity between the car body and the road surface, and the
sound further flows upwards and away from the door. When the window isslightly opened, the second sound source quite expectedly appears but the
dominant source still remains at the bottom of the car.
In order to investigate this phenomenon in further detail, SoundBrush
can be used to investigate the sound field under the car. This example
demonstrates the SoundBrush capabilities to further analyse key acoustic
phenomena thanks to its quick setup and its capability to measure in
difficult to reach locations. In addition the representation of the sound field
with a 3D vector cloud provides more insight in the acoustic phenomena at
hand when compared with traditional intensity measurement techniques
providing 2D representations (Fig. 14 and 15).
Fig. 14 - 2D representation of measurement, window closed
Fig. 15 - 2D representation of measurement, window 1 cm open
3.2. Measurement on an industrial cleaning machine
SoundBrush was used in an analysis of acoustic hotspots on an industrial
cleaning machine. Different regimes are available with this cleaner:
brushing, water cleaning, vacuuming, brushing and vacuuming … In the
plot below, the result is shown for the regime ‘vacuuming’. During the test,
one side of the cleaning machine was measured using SoundBrush.
Fig 16 clearly reveals the maximum sound intensity at the location of the
vacuum mouth in the back of the equipment, just above the floor.
Fig. 16 - 2D representation of SoundBrush measurement on an industrial
cleaning machine (left) and camera view of the hotspot region in the lower
left of the 2D image (right)
From the analysis of the frequency content, a single frequency source of250 Hz and lower amplitude is visible at some measurement locations.
When zooming in on the 250 Hz 1/3rd octave band, a sound source at the
back of the equipment becomes visible (see Fig. 17).
The ability of SoundBrush to view results in real-time allows a fast
identification of sound sources. In addition, spectral results help identifying
tonal components that provide the highest contribution to the noise
emitted from different sources inside the device under test.
Fig. 17 - 2D representation of measurement results on industrial cleaning
machine for the 1/3rd octave band at 250 Hz.
3.3. Car dashboard measurements.
Car dashboards are complex surfaces incorporating different sound
sources in sometimes very difficult to reach locations.
An in-car measurement was performed on a car ventilation system using
SoundBrush.
The sound field was measured above the dashboard (just below thewindscreen) as well as in front of the central ventilation openings in the
middle of the dashboard.
The car engine was in a stationary regime, running idle at 800 RPM, with
the ventilation system activated at full power. Fig. 18 clearly identifies
the two ventilation openings in the middle of the dashboard as sources of
noise of the ventilation system.
Fig. 18 - 2D representation of acoustic measurement around ventilation
openings in car dashboard

8/12/2019 WP Soundbrush 2013
http://slidepdf.com/reader/full/wp-soundbrush-2013 6/86LMS, A Siemens Business | [email protected] | www.lmsintl.com
Fig. 19 allows identification of the windshield ‘defrost’ sleeve at the top
of the dashboard (right below the windshield) as an important noise
source. SoundBrush is capable to measure in hard to reach locations such
as the area between the dashboard and the windshield that allows easy
identification of all relevant noise sources.
Fig. 19 - 3D view of SoundBrush measurement of a car dashboard (left) and
2D representation of a section plot around the defrost sleeve (right)
3.4. Laptop loudspeaker measurement.
In computer business, sound characteristics become increasingly
important.
A laptop was used for a SoundBrush measurement, to identify noise
sources from the laptop speakers left and right of the keyboard. The left
speaker signal contained a 500 Hz signal (and lower amplitude harmonicsof this signal); the right speaker signal consisted of a pure 2000 Hz signal.
The figures 20 to 22 show the SoundBrush results for a broadband
measurement, a filtered result from 315 to 630 Hz and a filtered result
from 1600 to 2500 Hz. The first plot clearly shows the two sound
sources, whereas the filtered results put emphasis on the left or right plot
respectively.
Fig. 20 - measurement on laptop with side speakers, 500 Hz on left speaker
and 2000 Hz on right speaker – broadband result
Fig. 21 - measurement on laptop with side speakers, 500 Hz on left speaker
and 2000 Hz on right speaker – filtered between 315 and 700 Hz
Fig. 22 - measurement on laptop with side speakers, 500 Hz on left speaker
and 2000 Hz on right speaker – filtered between 1600 and 2500 Hz
Next to each 3D plot, the 2D color map (interpolated results of the
SoundBrush measurements) reveals the same sound sources, but only in
a 2D representation. The 3D visualization of the sound field around an
object by the SoundBrush software provides more insight in the acoustic
phenomena of importance in each frequency of interest. The arrow
representation of SoundBrush reveals the orientation and propagation of
the sound waves emanating from a source, for both unfiltered and filtered
measurements.
3.5. Laundry dryer measurements.
Measurements with SoundBrush on a household laundry drying machine
provide a good example of the typical acoustic challenges faced in designing
white goods. A drying machine is investigated by first using SoundBrush on
the different sides of the machine followed by a finer measurement around
the door in order to analyze the efficiency of the door seal to isolate for
sources inside the dryer.
Fig. 23 reveals sound sources at the bottom right back side of the dryer
from the side panel measurements. The hot air exhaust was at the bottom
left back side (not shown on the image) and also clearly reveals a sound
source.
Fig. 23 - measurement on household drying machine (left: 3D model of the
dryer; right: SoundBrush measurements on different sides of the dryer)
In a next set of measurements, an investigation of the front side of the
dryer was performed in order to find sources of noise originating from this
side of the dryer.
Fig. 24 shows two sound sources: one around the door and one at the
bottom of the dryer.
Fig. 24 - SoundBrush measurement on drying machine – front side only (left:3D results; right: 2D representation of front side measurement)
Finally, a measurement was done of the dryer door seal.
Fig. 25 shows the frequency range from 100 to 4000 Hz, where the door
seal seems to have a more or less equal insulation effect over the door
circumference. However, Fig. 26 shows the results when filtering on the
200 Hz peak.
Fig. 25 - Dryer measurements around door seal: broadband result
Fig. 26 - Dryer measurements around door seal: result at 200 Hz
This figure shows two sound sources: one located at the left side of the
door, around the door hinge and one located at the right side of the door,
around the door lock.The hinge and lock of the dryer door seem to close less firmly, causing
noise to leak more easily at this location of the door.

8/12/2019 WP Soundbrush 2013
http://slidepdf.com/reader/full/wp-soundbrush-2013 7/87LMS, A Siemens Business | [email protected] | www.lmsintl.com
The ability of SoundBrush to quickly scan different sides of the dryer
in a single measurement session results in considerable time savings
compared to comparable measurements using traditional techniques or
using sound masking techniques. The SoundBrush measurement on the
dryer took ½ day, where other methods typically require 2 days or more.
4. CONCLUSIONS
A new SoundBrush measurement system was developed to brush andvisualize the 3D sound field of noise producing machinery. The system
consists of a handheld measurement probe integrating a 6 DOF tracking
system and 3D sound intensity sensor antenna. The sound intensity
vectors are visualized on-line in 3D while the operator moves the
probe around the test object. The measurement system is an efficient
acoustic troubleshooting tool for stationary applications allowing a quick
identification of the main sources, their interaction and propagation into
the far field. The 3D sound intensity vector field is precisely measured up
to 4 kHz with an accuracy of 1 dB in magnitude and 2.5 degrees standard
deviation in direction (maximum error 10 degrees).
The LMS SoundBrush can be used for acoustic testing and analysis in a
diversity of applications like source localization, leak detection, sound
propagation. The 3D positioning technology provides new insights in
acoustic phenomena and the sound flow around a device under test. Itsergonomic design allows measurement of acoustic problems in difficult
to reach locations and around complex surfaces. Finally, its intuitive user
interface and fast setup reduce typical measurement time drastically
in comparison with other acoustic measurement techniques such as
traditional intensity probes or acoustic array measurements.
5. ACKNOWLEDGEMENTS
This research is conducted in the context of the research project SOUND
BRUSH. The financial support of the Flemish Institute for Promotion of
Innovation (IWT) is gratefully acknowledged.
6. REFERENCES
1. EP1913346B1, “Device and method for determining scalarquantities or vector quantities”
2. G. Rasmussen, “Measurement of vector fields”, Proceedings
of the 2nd International Congress on Acoustic Intensity, pages
53-58, 1985
3. F. Jacobsen, “Sound Intensity and its measurement and
applications”, Technical University of Denmark, 2011
4. G. Krishnappa, “Interference effects in the two-microphone
technique of acoustic intensity measurements”, Noise Control
Engineering Journal 21, 126-135, 1983
5. U.S. Shirahatti and M.J. Crocker, “Two-microphone finite
difference approximation errors in the interference fields
of point dipole sources”, Journal of the Acoustical Society of
America 92, 258-267, 1992
6. F. Fahy, “Sound intensity”, E&FN Spon, London, 2
nd
edition, 19957. V. Trinh, “Measurement of sound intensity and sound power”,
DSTO Material research laboratory, 1994
8. 8. K. Janssens, D. De Weer, F. Bianciardi and T. Søndergaard,
“Online Sound Brush Measurement Technique for 3D Noise
Emission Studies”, Proceedings 13NVC-0192 of the SAE Noise
and Vibration Conference, May 2013

8/12/2019 WP Soundbrush 2013
http://slidepdf.com/reader/full/wp-soundbrush-2013 8/8
LMS INTERNATIONAL
Researchpark Z1, Interleuvenlaan 68
B-3001 Leuven [Belgium]
T +32 16 384 200 | F +32 16 384 350
[email protected] | www.lmsintl.com
Worldwide For the address of your local representative,
please visit www.lmsintl.com/lmsworldwide
© L
M S 2 0 1 3 .
A l l r i g h t s r e s e r v e d .
T h e m a t e r i a l s p r e s e n t e d h e r e a r e s u m m a r y
i n n a t u r e , s u b j e c t t o c h a n g e , a n d i n t e n d e d f o r g e n e r a l
i n f o
r m a t i o n o n l y .
A d d i t i o n a l d e t a i l s a n d t e c h n i c a l s p e c i fi c a t i o n s a r e a v a i l a b l e
a t w w w . l m s i n t l . c o m .
L M S I N T E R N A T I O N A L ,
L M S T e s t . L a b ,
L M S
V i r t u a l . L a b ,
L M S V i r t u a l . L a b D e s i g n e r , L M S I m a g i n e . L a b A M E S i m ,
L M S
S C A D A S ,
L M S S o u n d B r u s h ,
L M S T e s t . X p r e s s ,
L M S
T e c . M a n a g e r , L M S C A D A - X ,
L M S D A D S ,
L M S F A L A N C S ,
L M S P o l y M A X ,
L M S T e c W a r e ,
L M S T W R a n d L M S C D T i r e ,
S A M C E F ,
a r e
r e g i s t e r e d t r a d e m a r k s o f L M S I N T E R N A T I O N A L N V .
A l l o t h e r t r a d e m a r k s
a c k n o w l e d g e d .
LMS is a leading provider of test and mechatronic
simulation software and engineering services in
the automotive, aerospace and other advanced
manufacturing industries. As a business segment
within Siemens PLM Software, LMS provides a unique
portfolio of products and services for manufacturing
companies to manage the complexities of
tomorrow’s product development by incorporating
model-based mechatronic simulation and advanced
testing in the product development process. LMS
tunes into mission-critical engineering attributes,
ranging from system dynamics, structural integrity
and sound quality to durability, safety and power
consumption. With multi-domain and mechatronic
simulation solutions, LMS addresses the complex
engineering challenges associated with intelligent
system design and model-based systems
engineering. Thanks to its technology and more
than 1250 dedicated people, LMS has become the
partner of choice of more than 5000 manufacturing
companies worldwide. LMS operates in more than
30 key locations around the world.
Leading partner in
Test & Mechatronic Simulation