Embed Size (px)
Citation preview

Where innovation starts
Robotics for Medical & Automotive @ TU/e
Maarten Steinbuch






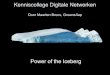
Haptics

Haptics

DaVinci surgery robot © Intuitive Surgery Inc.

IOP-PT
IOP-PT
IOP-MMI
STW

project part Funding budget [k€]
1. Slave (thorax- and abdomen)
S STW (TU/e) 460
2a Micro-Slave (eye) S IOP PT (TU/e, TNO) 698
2b Haptic Master M
3a Adaptive Haptics h-C IOP- MMI (TU/e) 437
3b Haptics Perception
h-C
4. 3D vision V Tbd 300

Slave layout
Instrument base set-up
Instrument modules
• Initial instrument adjustment
• Instrument manipulator
Instruments and force-feedback
Linda van den Bedem

Instrument base set-up

Instrument base set-up, Zθ-clamp

Where innovation starts
Eye Robot for Haptic Assisted Surgery
Eye RHAS
IOP-PT
TU/e: Prof. Dr. Ir. Maarten Steinbuch Prof. Dr. Henk Nijmeijer Dr. Ir. Nick Rosielle Ir. Ron Hendrix Ir. Thijs Meenink
AMC: Prof. Dr. Marc de Smet
TNO: Ir. Michiel Oderwald Ir. Jeroen Heijmans


Indeling operatiegebied
Ron Hendrix

Thijs Meenink

A Mechatronic Force Feedback Device
ir. Nico Weel Prof. dr. ir. M. Steinbuch, TU/edr. ir. A.F.A. Serrarens, DTI

Introduction
• Transmission tendency
• Central controller in combination with visual interface
2
2
MT
AT
CVT
AMT
1 shift-by-wire
stick technology

Introduction
C-Lever (Clever Lever):
Shift-by-wire and haptic
interior function control
shift pattern
dashboardinterface
Piezo sensing surface matrix

2
4
C-Lever working principle
Rotation around
Rotation around

C-Lever working principle
Self-locking
View point operator
2
5

Results
Velocity control
PRND haptic velocity patternvelocity
2
6

Results
2
7

Steer by wire
Dennis van Raaij

Haptics

Haptics Control Challenges
3
0