-
8/2/2019 Wavelet-based Salient Points for Image Retrieval
1/4
WAVELET-BASED SALIENT POINTS FOR IMAGE RETRIEVALE. Loupias. N.
Sebe
+Leiden Institute of Advanced Computer ScienceLeiden University,
Th e [email protected]
ABSTRACTThe use of interest points in content-based image
retrievalallows image index to represent local properties of
theimage. Classic corner detectors can be used for thispurpose.
However, they have drawbacks when applied tovarious natural images
for image retrieval, because visualfeatures need not be comers and
corners may gather insmall regions. In this paper, we present a
salient pointdetector that extract points where variations occur in
theimage, whether they are corner-like or not. The detector isbased
on wavelet transform to detect global variations aswell as local
ones. The wavelet-based salient points areevaluated for image
retrieval with a retrieval system usingtexture features. In this
experiment our method providesbetter retrieval performance
comparing with other pointdetectors.
1. INTRODUCTIONWe are interested in content-based image
retrieval ingeneral image databases. The query is an image
(iconicsearch), and the retrieved images should be similar to
thequery. We assume that high-level concepts (objects,feelings,
etc.) cannot be extracted automatically from theimage without
specific knowledge, and so use an imagesimilarity based on
low-level features (such as color,texture and shapes).An image is
summarized by a set of features, theimage index, to allow fast
querying. Local features are ofinterest, since they lead to an
index based on localproperties of the image. This approach is also
attractivefor sub-image search.The feature extraction is limited to
a subset of imagepixels, the interest points, where the image
information issupposed to be the most important [9,2,12,1]. This
paperfocuses on the selection of points that are significant
tocompute features for indexing.Comer detectors are commonly used
for indexing[9,12]. They are usually defined as points where
gradientis high in multiple orientations. This definition leads
to
S. Bres J. M. Jolion** Laboratoire Reconnaissance de Formes
et Vision, INSA L yon, France{ loup ias,sbresj olion ]@ rfv
.insa-1yon .fr
detectors based on local derivatives [6 ,5] . Anotherapproach is
based on local neighborhood properties [l o].Comer detectors are in
general designed for robotics andshape recognition and therefore,
they have drawbackswhen are applied to natural image
retrieval.Visual focus points need not be corners: visualmeaningful
feature is not necessarily located in a comerpoint. For instance in
Figure 1, the fur is too smoothed tobe detected by a comer detector
such as Harris [5].
~ ~~~~(a) Fox image (b) 100corners (Harris)Figure 1. Image with
smoothed edges
Corners may gather in small regions: in variousnatural images,
regions may well contain textures (trees,shirt patterns, etc.),
where a lo t of corners are detected (cf.Figure 2) . As the number
of points is preset to limit theindexing computation time, most of
the corners are in thesame textured region. .
(a) Dutch image (b) 100corners (Harris)Figure 2. Image with
texture in the Dutch dress
With comer detectors, both examples lead to anincomplete
representation, where some parts of the imageare not described in
the index.For these reasons, comer points may not represent themost
interesting subset of pixels for image indexing.Indexing points
should be related to an y visualinteresting part of the image,
whether it is smoothed or
5180-7803-6297-7/00/$10.000 000 IEEE
Authorized licensed use limited to: NATIONAL INSTITUTE OF
TECHNOLOGY WARANGAL. Downloaded on November 3, 2008 at 04:28 from
IEEE Xplore. Restrictions apply.
-
8/2/2019 Wavelet-based Salient Points for Image Retrieval
2/4
corner-like. To describe different parts of the image, theset of
interesting point should not be clustered in fewregions.From now
on, we will refer to these points as salientpoints, which are not
necessarily corners. We will avoidthe term interest points, which
is ambiguous, since it waspreviously used in the literature as
corner. Waveletrepresentations, which express image variations
atdifferent resolutions, are attractive to extract salient
points.Previous point detectors make use of
multiresolutionrepresentation. Chen et al. consider two
differentresolutions to extract comers [3]. In image
retrievalcontext, contrast-based points are extracted in [ 2 ]
.However, a lot of points are also extracted in texturedregions
because these regions are contrasted. Points areextracted with a
specific wavelet in [I] but, since only agiven scale is used,
different resolutions features cannot bedetected.
2. FROM WAVELETS TO SALIENT POINTSThe wavelet transform is a
multiresolution representationthat expresses image variations at
different scales. Forwavelet theory, see [ 8 ] . For wavelet
description andalgorithms, see [11 .A wavelet is an oscillating and
attenuated function (itsintegral is equal to zero). We study the
image f t thescales (or resolutions) ?h,%, . 2 , j~ 2 and j I -1 .
Thewavelet detail image W 2,f is the convolution of theimage with
the wavelet function dilated at different scales.
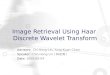
(a) Cameraman image (b) Haar transformFigure 3. Haar
transform
Here we consider orthogonal wavelets, which lead to acomplete
and non-redundant representation of the image.A wavelet can also
have a compact support: its value iszero outside a bounded
interval. The simplest orthogonalcompactly supported wavelet is the
Haar wavelet (seeFigure 3), which is the discontinuous step
function.Daubechies proposed wavelets, with any regularity p0,>
1 ), that are also orthogonal and compactly supportedt41:
The wavelet representation gives information about thevariations
in the signal at different scales. In our retrievalcontext, we
would like to extract salient points from anypart of the image
where something happens in the signalat any resolution. A high
wavelet coefficient (in absolutevalue) at a coarse resolution
corresponds to a region withhigh global variations. The idea is to
find a relevant pointto represent this global variation by looking
at waveletcoefficients at finer resolutions.
Since we use wavelets with a compact support, we knowfrom which
signal points each wavelet coefficient at thescale 2 was computed.
We can study the waveletcoefficients for the same points at the
finer scale 2.Indeed there is a set of coefficients at the scale
2+computed with the same points as a coefficient W2J ( n )at the
scale 2 (see [ 7 ] for details). We call this set ofcoefficients
the children C(W2, ( n ) ) of the coefficientW z ,f n ) The
children set in one dimension is:c(w,, f ( n > ) = f ( k ) , 2n
s k I 2n+ 2 p I 1,
where 0 I n < 2N, with N the length of the signal and pthe
wavelet regularity.Each wavelet coefficient W2, ( n ) is computed
with
2 - p signal points. It represents their variation at thescale
2. Its children coefficients give the variations ofsome particular
subsets of these points (with the number ofsubsets depending on the
wavelet). The most salient subsetis the one with the highest
wavelet coefficient at the scale2+, that is the maximum in absolute
value ofC(W2,f n ) ) . In our salient point extraction algorithm,
weconsider this maximum, and look at its highest child.Applying
recursively this process, we select a coefficientW2-l f (n )at the
finer resolution ?h cf. Figure 4). Hence,this coefficient only
represents 2p signal points. To selecta salient point from this
tracking, we choose among these2p points the one with the highest
gradient. We set it ssaliency value as the sum of the absolute
value of thewavelet coefficients in the track:saliency = -I (Ck(V2,
/(n)l ,0 n < 2N, -log* N I I1
k=l
The tracked point and its saliency value are computedfor every
wavelet coefficient. A point related to a globalvariation has a
high saliency value, since the coarsewavelet coefficients
contribute to it. A finer variation also
I For clarity we use one-dimensional signals. Extension to
twodimensions and signals with length not restricted to a power of
2 ,in addition to algorithm complexity, are discussed in [7].
519
Authorized licensed use limited to: NATIONAL INSTITUTE OF
TECHNOLOGY WARANGAL. Downloaded on November 3, 2008 at 04:28 from
IEEE Xplore. Restrictions apply.
-
8/2/2019 Wavelet-based Salient Points for Image Retrieval
3/4
leads to an extracted point, but with a lower saliencyvalue. We
then need to threshold the saliency value, inrelation to the
-desired number of salient points. We firstobtain the points
related to global variations; localvariations also appear if enough
salient points arerequested.
(a) 100Haar salient points for the Fox image
~ ~~(a) 100Haarsalient points (b) Tracked coefficients
(c) Spatial support of tracked coefficientsFigure 4. Salient
points extraction ,The salient points extracted by this process
depend onthe wavelet we use. Haar is the simplest wavelet
function,
so the fastest for execution. Some localization drawbackscan
appear with Haar due to its non-overlapping waveletsat a given
scale. This can be avoided with the simplestoverlapping wavelet,
Daubechies 4.However, this kind ofdrawback is not likely in natural
images.3. EXAMPLES
The salient points detected with the Haar transform arepresented
for the images used in Figure 1and Figure 2(cf:Figure 5 ) . For
each image the detected points aresuperimposed on the original
image to evaluate salientpoints location.Salient points are
detected for smoothed edges (cf:Figure 5.a) and are not gathered in
textured regions ( c jFigure 5.b). Hence they lead to a more
complete imagerepresentation than comer detectors. Similar behavior
canbe observed with Daubechies 4 wavelets.Repeatability of the
detection under typical alterations isa common evaluation criterion
for corner detectors.Repeatability of our detector is comparable to
otherdetectors. However this criterion may not be relevant inour
context, because features stability is more importantthan geometric
stability for image retrieval.
(b) 100Haar salient points for the Dutch imageFigure 5. Haar
salient points examples
4. EVALUATION FOR IMAGE RETRIEVALThe best way to evaluate points
detectors for imageretrieval is to compare retrieval results
obtained with eachdetector. The retrieval system is constituted by
theindexing (points extraction and computation of localfeatures to
build image indexes) and the querying (basedon a similarity measure
between indexes).Different retrieval features and image databases
are usedin [7] to compare points detectors. Here we present
resultswith an image retrieval system2 based on texture
features[13]. Gabor features are computed for regions around
theextracted points for 3 scales and 8 orientations.
Maximumamplitudes are used to build a set of histograms, which
isthe image index.
We use a database of 1505 various natural images. Eachimage
belongs to an instinctive (and subjective) category(animals,
flowers, landscapes, buildings, cities.. .). Veryheterogeneous
categories and images too different fromthe rest of the category
are removed from the test set.Finally, we have a test set of 577
images in 9 classes.We present the recall-precision graph, computed
fromdifferent numbers of return images n. The system retrievesr
images that belong to the same class C as the query(Y I). There are
Nc images in the class C of the query.Then P = r I n is the
precision and R = r I N , the recallfor this query. We use each
test set image as a query, anduse the average recall and precision
for the graph (4Figure 6).
* This retrieval system is available through KIWI, the
Key-points Indexing Web
Interface:http://telesun.insa-lyon.fr/kiwi520
Authorized licensed use limited to: NATIONAL INSTITUTE OF
TECHNOLOGY WARANGAL. Downloaded on November 3, 2008 at 04:28 from
IEEE Xplore. Restrictions apply.
http://telesun.insa-lyon.fr/kiwihttp://telesun.insa-lyon.fr/kiwihttp://telesun.insa-lyon.fr/kiwi
-
8/2/2019 Wavelet-based Salient Points for Image Retrieval
4/4
656055
Q 50453 4030
-.-
p' 35
25L--- I0 J0 5 10 15 20Recall (%)
Figure 6. Retrieval resultsWe observe that the wavelet-based
salient pointsperform better than other detectors for these
features andthis database. Daubechies 4 has better performances
thanHaar but is computationally more expensive. Randompoints are
also used in the experiment: we randomly selectpoints, and compute
the Gabor features around these
points. Their good result can be explained by theirspreading in
the image. For that reason they lead to a morecomplete
representation of the image than some detectors.Obviously, the
random points are very unlikely to belocated in corners or edges
point, but they are spreadenough to represent these variations in
the index. Goodresult of random points for indexing was observed
withother databases and other local features [7]. Theseexperiments
show that the points spreading can be asimportant as the points
location for image indexing(depending on the features). However,
wavelet-basedsalient points, which are simultaneously spread
andlocated, perform better than random points.5. DISCUSSION
We presented a salient point detector based on wavelets.The
wavelet-based salient points are interesting for imageretrieval,
because they are located in many visual features(whether they are
corner-like or not), without gathering intextured regions. We
presented a retrieval experiment withGabor features where our
method performs better thanother point detectors from the
literature.We used the Haar transform for point extraction, whichis
simple but may lead to bad localization. Daubechieswavelets avoid
this drawback, but are not symmetric.Since orthogonality is not
required in our approach, wecould extend it to other wavelets that
are compactlysupported and symmetric.Since points performance for
indexing depends on theimage database, detector choice for a
specific databaseshould be investigated, as well as random points
relevancefor local features extraction.
Wavelets are also attractive to extract image features
forindexing. These local features would be more related toour
salient points.6. ACKNOWLEDGMENTS
E. Loupias' guest period in Leiden University wassupported by
the RhGne-Alpes Region, France(EURODOC grant). Thanks to Dr. D.P.
Huijsmans andProf. F. Peters, Leiden University, for discussions we
hadabout this topic.
7. REFERENCES[l ] S. Bhattacharjee and T. Ebrahimi, "Image
Retrieval Basedon Structural Content ", Workshop on Image Analysis
forMultimedia Interactive Services, Heinrich-Hertz-Institut
(HHI)Berlin, Germany, May 31 - June 1 1999.[2] S. Bres and J.-M.
Jolion, "Detection of Interest Points forImage Indexation ", 3rd
Int. Con$ on Visual InformationSystems, VisuaZ99,Amsterdam, The
Netherlands, June 2-4 1999,[3] C.-H. Chen, J.-S. Lee and Y.-N. Sun,
"WaveletTransformation for Gray-level Comer Detection ",
PatternRecognition, 1995, Vol. 28, No. 6, pp. 853-861.[4] I.
Daubechies, " Orthonormal bases of compactly supportedwavelets ",
Communications on Pure and Applied Mathematics,[5] C . Harris and
M. Stephens, " A Combined Comer and EdgeDetector ",Proc. of 4th
Alvey Vision Conference, 1988, pp. 147-151.[6] L. Kitchen and A.
Rosenfeld, "Gray-Level ComerDetection ", Pattern Recognition
Letters, December 1982, Vol.171 E. Loupias and N. Sebe, "
Wavelet-based Salient Points forImage Retrieval", RR 99.11,
Laboratoire Reconnaissance deFormes et Vision, INSA Lyon, November
1999. On-linehttp://rfv.insa-1yon.fr/-loupias/points/[8] S. Mallat,
"A Theory for Multiresolution SignalDecomposition :The Wavelet
Representation ",IEEE Trans. on191 C. Schmid and R. Mohr, "Local
Grayvalue Invariants forImage Retrieval ",IEEE Trans. on PAMI, May
1997, Vol. 19,[lo] S. Smith, J. Brady, "SUSAN - A New Approach to
LowLevel Image Processing ", International Journal of
ComputerVision,May 1997,Vol. 23, No. 1 , pp. 45-78.[ I l l E.
Stollnitz, T. DeRose and D. Salesin, "Wavelets forComputer
Graphics: A Primer, part 1 ", IEEE ComputerGraphics and
Applications, May 1995, Vol. 15, No. 3, pp. 76-84.[I21 T.
Tuytelaars and L. Van Gool, "Content-based ImageRetrieval Based on
Local Affinely Invariant Regions ", 3rd Int.Conf on Visual
Information Systems, Visual99,Amsterdam, TheNetherlands, 2-4 June
1999, pp. 493-500.[I31 C. Wolf, "Content based Image retrieval
using InterestPoints and Texture Features ", RR 99.09,
LaboratoireReconnaissance de Formes et Vision, INSA Lyon, 1999.
On-line demo :http://telesun.insa-lyon.fr/kiwi
pp. 427-434.
1988, Vol. 41, pp. 909-996.
1,NO. 2, pp. 95-102.
PAMI, July 1989, Vol. 11,NO. 7, pp. 674-693.
NO. 5, pp. 530-535.
52
Authorized licensed use limited to: NATIONAL INSTITUTE OF
TECHNOLOGY WARANGAL Downloaded on November 3 2008 at 04:28 from
IEEE Xplore Restrictions apply
http://rfv.insa-1/http://telesun.insa-lyon.fr/kiwihttp://telesun.insa-lyon.fr/kiwihttp://telesun.insa-lyon.fr/kiwihttp://rfv.insa-1/