Embed Size (px)
Citation preview
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
VTU-NPTEL-NMEICT Project Progress Report
The Project on Development of Remaining Three Quadrants to NPTEL Phase-I under grant in aid NMEICT, MHRD, New Delhi
DEPARTMENT OF MECHANICAL ENGINEERING, GHOUSIA COLLEGE OF ENGINEERING,
RAMANARAM -562159
Subject Matter Expert Details
SME Name : Dr.MOHAMED HANEEF
PRINCIPAL, VTU SENATE MEMBER
Course Name:
Vibration engineering
Type of the Course web
Module
III
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 1 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
CONTENTS
Sl. No. DISCRETION
1. Lecture Notes (Single-DOF free Vibration).
2. Quadrant -2
a. Animations.
b. Videos.
c. Illustrations.
3. Quadrant -3
a. Wikis.
b. Open Contents
4. Quadrant -4
a. Problems.
b. Assignments
c. Self Assigned Q & A.
d. Test your Skills.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 2 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
SINGLE DEGREE OF FREEDOM FREE VIBERATION LECTURE NOTES
1.DAMPED FREE VIBRATION OF SINGLE DEGREE OF FREEDOM SYSTEMS
In general, all physical systems are associated with one or the other type of damping. In most
of the cases the amount of damping may be small and in other cases large. When damped free
vibrations takes place, the amplitude of vibration gradually becomes small and finally lost
completely. The rate, at which the amplitude decays, depends upon the type and amount of
damping in the system. The aspects we are primary interested in damped free vibrations are
1) the frequency of damped oscillations 2) and the rate of decay
VISCOUS DAMPING FREE VIBRATION
Viscous Damping: Viscous damping is encountered by bodies moving at moderate speed
through a liquid. This type of damping leads to a resisting force proportional to the velocity.
The damping force is given by
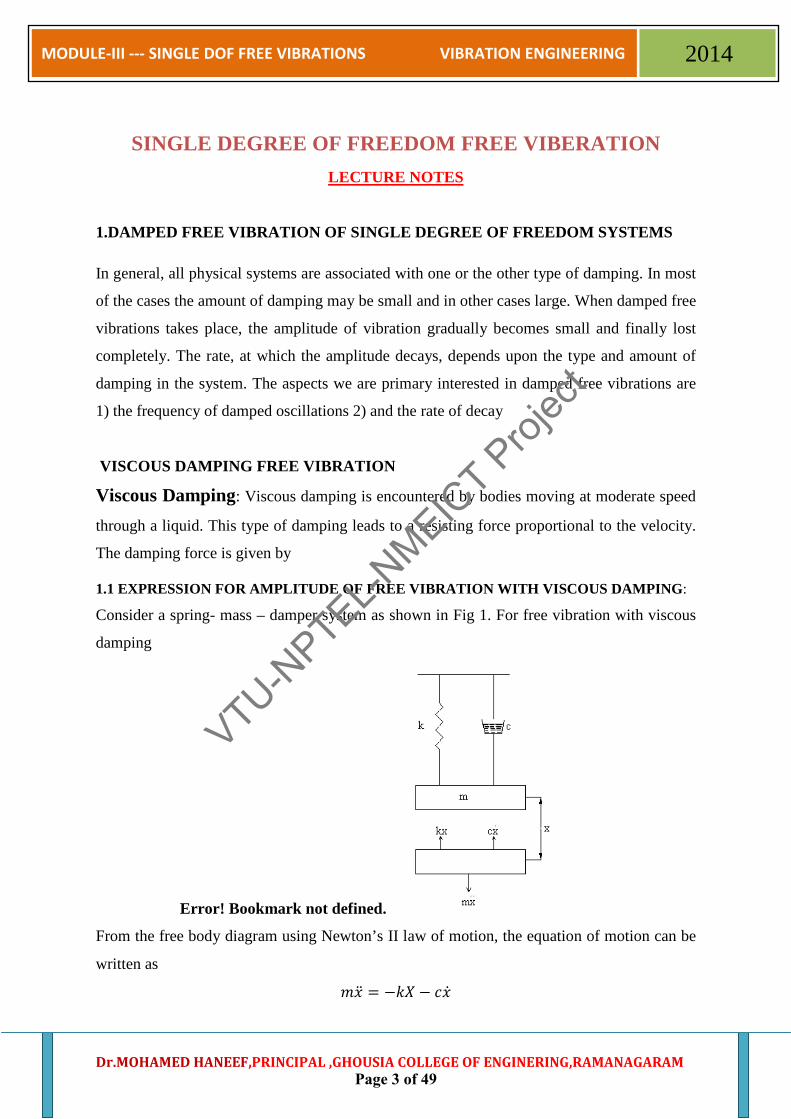
1.1 EXPRESSION FOR AMPLITUDE OF FREE VIBRATION WITH VISCOUS DAMPING:
Consider a spring- mass – damper system as shown in Fig 1. For free vibration with viscous
damping
Error! Bookmark not defined.
From the free body diagram using Newton’s II law of motion, the equation of motion can be
written as
𝑚�̈� = −𝑘𝑋 − 𝑐�̇�
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 3 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
𝑚�̈� + 𝑘𝑋 + 𝑐�̇� = 0
Equation (1) is the differential equation assuming the solution of the form 𝑥 = 𝑒𝑠𝑡, P
∴ �̇� = 𝑠𝑒𝑠𝑡 , �̈� = 𝑠2𝑒𝑠𝑡 P
where s is the constant to be determined.
Substituting the above values in equation (1) we get
𝑚𝑠2𝑒𝑠𝑡 + 𝑐𝑠𝑒𝑠𝑡 + 𝑘𝑒𝑠𝑡 = 0
(𝑚𝑠2 + 𝑐𝑠 + 𝑘) 𝑒𝑠𝑡 = 0
𝑠2 + (𝑐/𝑚) 𝑠 + 𝑘/𝑚 = 0
This is the quadrant equation, the solution of which is
𝑠1,2 =−(𝑐 𝑚⁄ )±�(𝑐 𝑚⁄ )2−4×1×�𝑘 𝑚� �
2×1
𝑠1,2 = −�𝑐 2𝑚� � ± ��𝑐 2𝑚� �2− �𝑘 𝑚� � −−−−(2)
The general solution may be written as
𝑋 = 𝐴 𝑒 𝑠1𝑡 + 𝐵 𝑒𝑠2𝑡 −−−−− (3)
Where A & B are arbitrary integration constant which depends upon how the motion is
started.
Substitute equation (2) in equation (3)
𝑋 = 𝐴 𝑒 �−�𝑐 2𝑚� �+��𝑐 2𝑚� �2−�𝑘 𝑚� ��t
+ 𝐵 𝑒�−�𝑐 2𝑚� �−��𝑐 2𝑚� �2−�𝑘 𝑚� ��t
−−−−− (4)
The behavior of the system depends upon whether the radial of equation (4) is real, imaginary
or zero. When the damping term �𝑐 2𝑚� �2
> �𝑘 𝑚� � the exponents in the above equation are
real numbers and no oscillation are possible. We refer to this case as over damped
When the damping term�𝑐 2𝑚� �2
< �𝑘 𝑚� �, the exponents are imaginary, this case is known
as under damped.
In the limiting case between oscillatory and non oscillatory motion �𝑐 2𝑚� �2
= �𝑘 𝑚� �, and
the radical is zero. The damping corresponding to this case is called critical damping.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 4 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
Critical Damping and Damping factor
Critical damping co-efficient Cc is defined as that damping as Co- efficient which makes the
radical zero i.e (𝐶𝑐 /2𝑚)2 – 𝑘/𝑚 = 0
(𝐶𝑐 /2𝑚)2 = 𝑘/𝑚
𝐶𝑐 /2𝑚 = �𝑘/𝑚
𝐶𝑐 /2𝑚 = 𝜔𝑛
𝐶𝑐 = 2𝑚𝜔𝑛
The damping factor denoted by ζ, is defined as the ratio of damping Co efficient to critical
damping Co efficient i.e.
ξ =𝐶𝐶𝐶
It is a non dimensional relation
The term 𝐶 / 2𝑚 = 𝐶 / 𝐶𝑐 𝑥 𝐶𝑐/2𝑚 = 𝜁 𝜔𝑛
Substituting this in Equation (4) we get
𝑋 = 𝐴 𝑒 �−(𝜁 𝜔𝑛)+�(𝜁 𝜔𝑛)2−𝜔𝑛2�t + 𝐵 𝑒�−(𝜁 𝜔𝑛)−�(𝜁 𝜔𝑛)2−𝜔𝑛2�t
𝑋 = 𝐴 𝑒 �–𝜁+�𝜁 2−1�𝜔𝑛t + 𝐵 𝑒�−𝜁−�𝜁 2−1�𝜔𝑛t −−−−− (5)
It is clear from equation (5)
Three cases of interest exists when
i) ζ >1
ii) ζ =1
iii) ζ <1
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 5 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
12. SPECIAL CASES: OSCILLATORY, NON OSCILLATORY AND CRITICALLY
DAMPED MOTIONS.
Case (i): OSCILLATORY DAMPED MOTIONS
When ζ <1 (light damping or under damping): The radical in this case is imaginary and
definite oscillatory motion takes place, in this case the displacement is oscillatory with
diminishing amplitudes.
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
The general solution of above equation can be obtained as follows:
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
𝑋 = 𝑒−𝜁𝜔𝑛t � 𝐴 �𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + i sin ��1− 𝜁 2� 𝜔𝑛t� + 𝐵 �𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t − i sin ��1 − 𝜁 2�𝜔𝑛t��
𝑋 = 𝑒−𝜁𝜔𝑛t � (𝐴 + 𝐵)𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + (𝐴 − 𝐵)𝑖 𝑠𝑖𝑛 ��1 − 𝜁 2�𝜔𝑛t �
𝑋 = 𝑒−𝜁𝜔𝑛t � 𝐶1𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + 𝐶2𝑠𝑖𝑛 ��1 − 𝜁 2�𝜔𝑛t �
Where, C1= A+B & C2 = i (A-B)
𝑋 = 𝑒−𝜁𝜔𝑛t{ 𝐶1𝑐𝑜𝑠𝜔𝑑t + 𝐶2𝑠𝑖𝑛𝜔𝑑t }
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 6 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
Where 𝜔𝑑 = 𝑐𝑜𝑠��1 − 𝜁 2�𝜔𝑛is damped frequency
The term 𝜔𝑑 is the circular frequency of damped oscillation in radians/sec and damped time
period.
𝑇𝑑 =2𝜋𝜔𝑑
And damped frequency,
𝑓𝑑 =𝜔𝑑2𝜋
Equation (6) is the solution of the differential equation for small damping this can be written
as
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅)
= 𝑋𝑋𝑒−𝜁𝜔𝑛t 𝑆𝑖𝑛 [ ��1 − 𝜁 2�𝜔𝑛t + Ф ]
Where 𝑋 = �𝐶12 + 𝐶22
𝑡𝑎𝑛 Ф = (𝐶1 / 𝐶2)
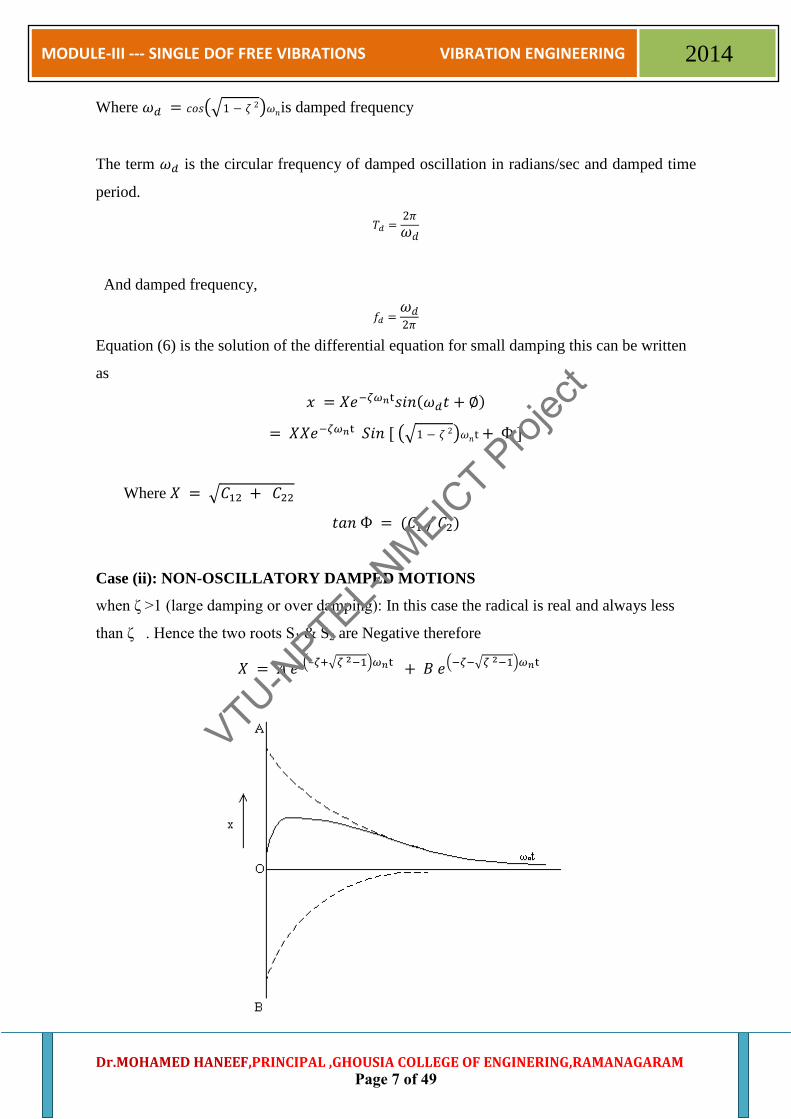
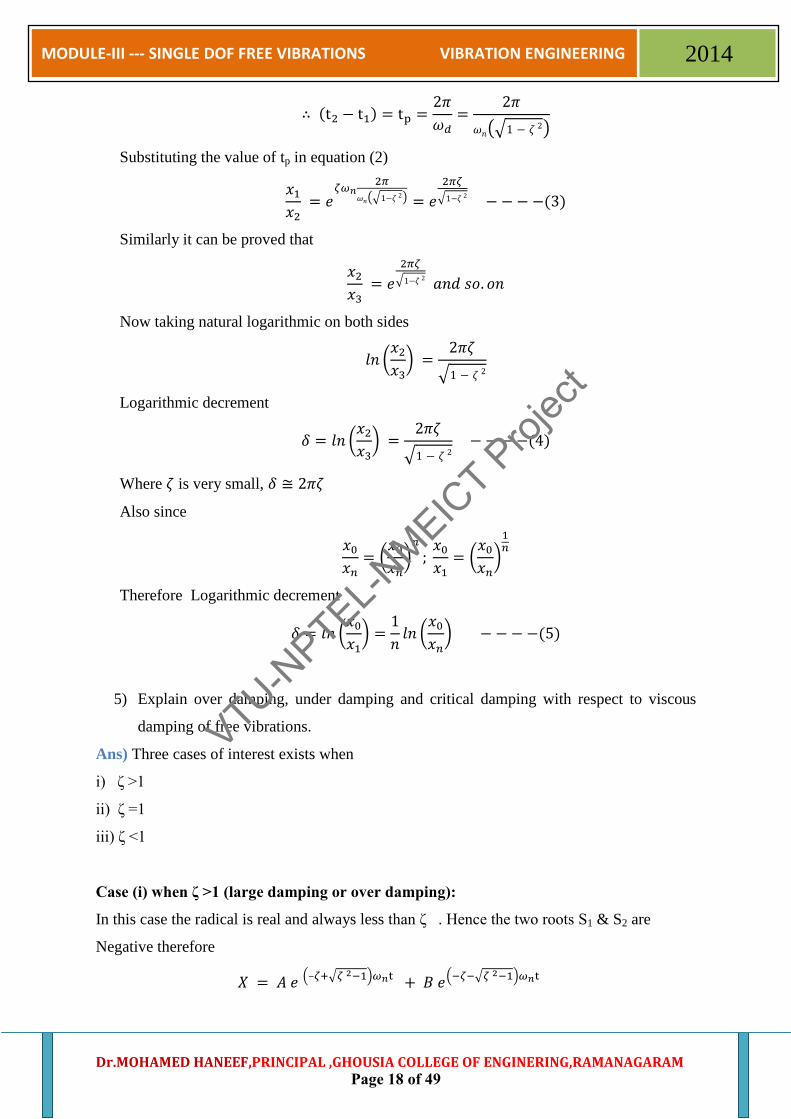
Case (ii): NON-OSCILLATORY DAMPED MOTIONS
when ζ >1 (large damping or over damping): In this case the radical is real and always less
than ζ . Hence the two roots S1 & S2 are Negative therefore
𝑋 = 𝐴 𝑒 �–𝜁+�𝜁 2−1�𝜔𝑛t + 𝐵 𝑒�−𝜁−�𝜁 2−1�𝜔𝑛t
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 7 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
The displacement became the sum of two decaying components. The above equation
represents the case with very large damping, the motion is not periodic and no vibration takes
place. This type of vibration is also called as aperiodic vibration.
Case (iii): CRITICALLY DAMPED MOTIONS.
ζ = 1[Critical damping or initial damping], represents the transition between oscillatory and
non- oscillatory condition. The amount of damping corresponds to this case is referred to as
critical or initial damping. Since the radical of equation (1) is zero for critical damping, the
two roots ζ1 & ζ2 are equal and alike.
𝑋 = (𝐴 + 𝐵)𝑒−𝜁𝜔𝑛t 𝑋 = 𝐶𝑒−𝜁𝜔𝑛t
Where C= A+B = constant
The above equation contains only one arbitrary constant. The solution lacks the required
number of independent constant to represent general solution. In this case a function of the
form te - ωnt will found to satisfy the differential equation. When substituting the general
solution can be written as
𝑋 = (𝐴 + 𝐵𝑡)𝑒−𝜁𝜔𝑛t 1.3. LOGARITHMIC DECREMENT, EXPERIMENTAL DETERMINATION OF
DAMPING COEFFICIENT.
1. Logarithmic Decrement:
A convenient way of determining the amount of damping in a system is to measure the rate of
decaying oscillations. This can be best expressed by a term called ‘logarithmic Decrement’.
It is defined as the natural logarithmic ratio of any two successive amplitudes. It is denoted
by δ
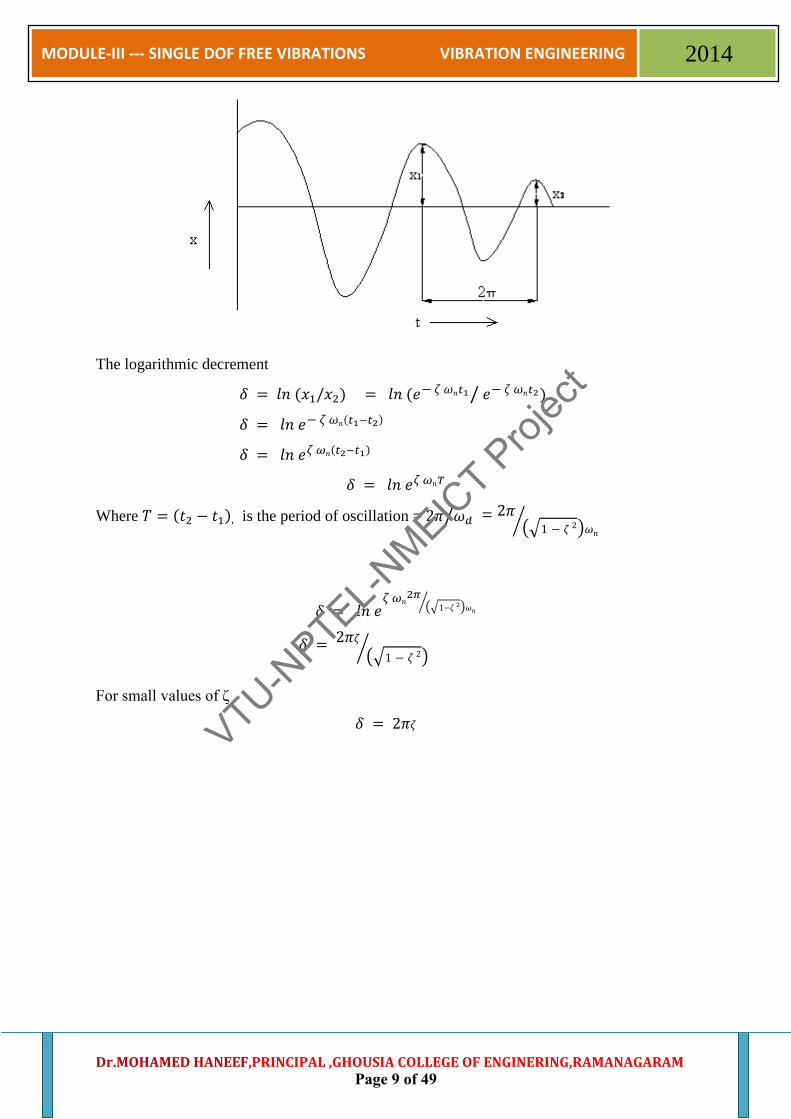
Consider a damped free vibration express by the equation.
𝑋 = 𝑒−𝜁𝜔𝑛t{ 𝐶1𝑐𝑜𝑠𝜔𝑑t + 𝐶2𝑠𝑖𝑛 𝜔𝑑t }and the oscillatory motion as shown in fig
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 8 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
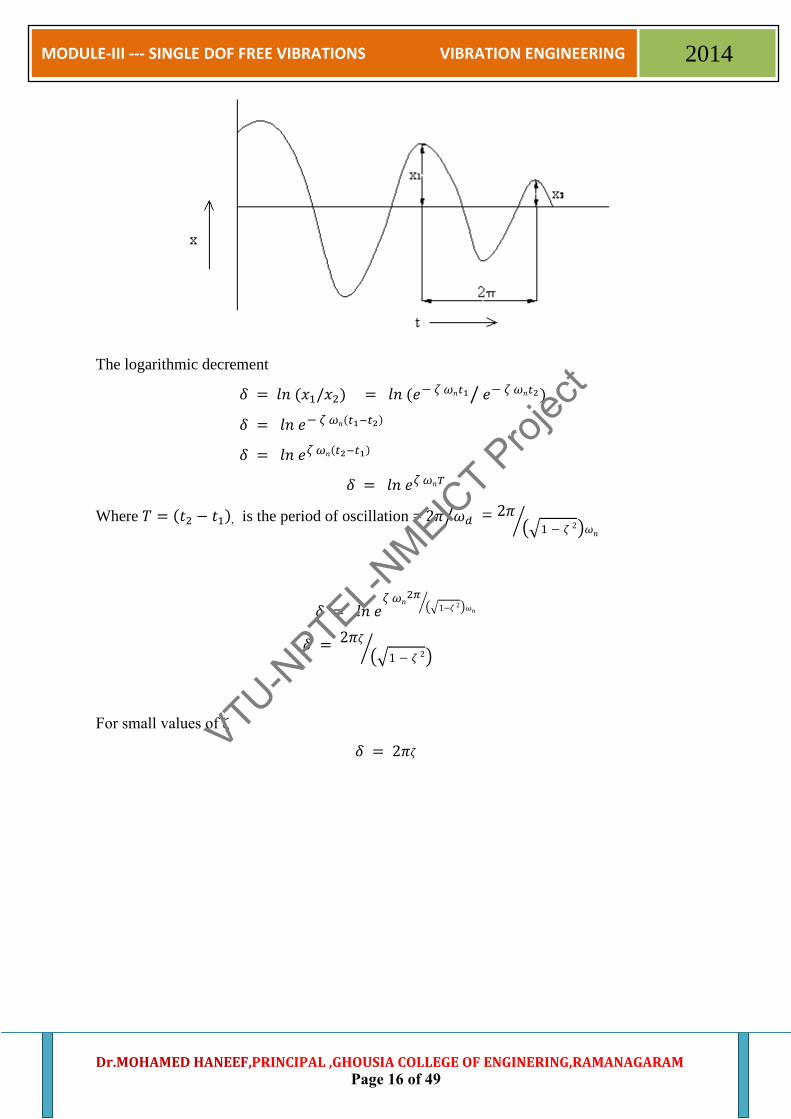
The logarithmic decrement
𝛿 = 𝑙𝑛 (𝑥1/𝑥2) = 𝑙𝑛 (𝑒− 𝜁 𝜔𝑛𝑡1/ 𝑒− 𝜁 𝜔𝑛𝑡2)
𝛿 = 𝑙𝑛 𝑒− 𝜁 𝜔𝑛(𝑡1−𝑡2)
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛(𝑡2−𝑡1)
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛𝑇
Where 𝑇 = (𝑡2 − 𝑡1), is the period of oscillation = 2𝜋/𝜔𝑑 = 2𝜋��1 − 𝜁 2�𝜔𝑛�
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛
2𝜋��1−𝜁 2�𝜔𝑛�
𝛿 = 2𝜋𝜁��1 − 𝜁 2��
For small values of ζ
𝛿 = 2𝜋𝜁
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 9 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
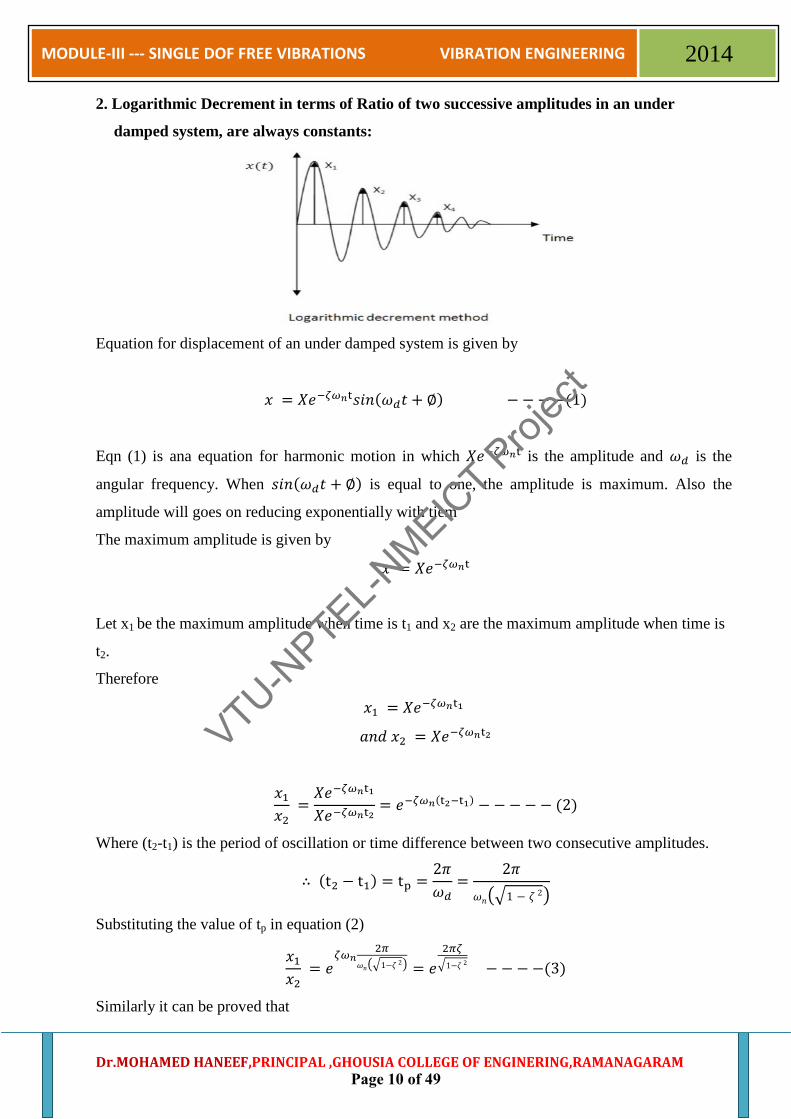
2. Logarithmic Decrement in terms of Ratio of two successive amplitudes in an under
damped system, are always constants:
Equation for displacement of an under damped system is given by
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅) −−−−(1)
Eqn (1) is ana equation for harmonic motion in which 𝑋𝑒−𝜁𝜔𝑛t is the amplitude and 𝜔𝑑 is the
angular frequency. When 𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅) is equal to one, the amplitude is maximum. Also the
amplitude will goes on reducing exponentially with tiem
The maximum amplitude is given by
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t
Let x1 be the maximum amplitude when time is t1 and x2 are the maximum amplitude when time is
t2.
Therefore
𝑥1 = 𝑋𝑒−𝜁𝜔𝑛t1
𝑎𝑛𝑑 𝑥2 = 𝑋𝑒−𝜁𝜔𝑛t2
𝑥1𝑥2
=𝑋𝑒−𝜁𝜔𝑛t1
𝑋𝑒−𝜁𝜔𝑛t2= 𝑒−𝜁𝜔𝑛(t2−t1) −−−−− (2)
Where (t2-t1) is the period of oscillation or time difference between two consecutive amplitudes.
∴ (t2 − t1) = tp =2𝜋𝜔𝑑
=2𝜋
𝜔𝑛��1 − 𝜁 2�
Substituting the value of tp in equation (2)
𝑥1𝑥2
= 𝑒𝜁𝜔𝑛
2𝜋𝜔𝑛��1−𝜁 2� = 𝑒
2𝜋𝜁�1−𝜁 2 −−−−(3)
Similarly it can be proved that
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 10 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
𝑥2𝑥3
= 𝑒2𝜋𝜁�1−𝜁 2 𝑎𝑛𝑑 𝑠𝑜. 𝑜𝑛
Now taking natural logarithmic on both sides
𝑙𝑛 �𝑥2𝑥3� =
2𝜋𝜁�1 − 𝜁 2
Logarithmic decrement
𝛿 = 𝑙𝑛 �𝑥2𝑥3� =
2𝜋𝜁�1 − 𝜁 2
−−−−(4)
Where 𝜁 is very small, 𝛿 ≅ 2𝜋𝜁
Also since
𝑥0𝑥𝑛
= �𝑥0𝑥𝑛�𝑛
; 𝑥0𝑥1
= �𝑥0𝑥𝑛�1𝑛
Therefore Logarithmic decrement
𝛿 = 𝑙𝑛 �𝑥0𝑥1� =
1𝑛𝑙𝑛 �
𝑥0𝑥𝑛� −−−−(5)
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 11 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
QUADRANT-2
Animations • http://www.animations.physics.unsw.edu.au//jw/SHM.htm • www.efunda.com/formulae/vibrations/sdof_free_damped.cfm • www.learnerstv.com/animation/animation.php?ani=49&cat=physics • www.acs.psu.edu/drussell/Demos/SHO/mass.html • resonanceswavesandfields.blogspot.com/.../strong-damping-critical-dam... • http://hyperphysics.phy-astr.gsu.edu/hbase/oscda.html • www.cdeep.iitb.ac.in/nptel/Mechanical/.../Course_home10.3.html • https://www.google.co.in/search?q=animations+of+non+oscillating+motions&tbm=is
ch&tbo=u&source=univ&sa=X&ei=2zDeUqKrCc2JrAf9zYDoBQ&ved=0CG8QsAQ&biw=1440&bih=809
Videos:
• www.youtube.com/watch?v=hsCZsofJuwY • www.youtube.com/all_comments?v=hsCZsofJuwY
• freevideolectures.com › Mechanical › IIT Kanpur
• www.tcyonline.com/...viscously-damped-free-vibration...damped.../1015...
• www.up-grade.me/frame/viewonline.htm?onlineId=25i36925&term= • www.youtube.com/watch?v=R5WCJyWdhzk • www.youtube.com/watch?v=FVFcDOkQm2E • www.youtube.com/watch?v=U1cSvRGZYcM • www.youtube.com/watch?v=3hJXJaow5ps • www.youtube.com/watch?v=9XmnB_y_gi4 • www.youtube.com/watch?v=8Oc08LElPr0 • www.youtube.com/watch?v=t5ZS7aOczxo
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 12 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
ILLUSTRATIONS
1) Explain the following types of damping
a) Viscous damping
b) Coulomb damping
c) Structural damping or solid damping
d) Slip or Interfacial damping
Ans) Viscous Damping: Viscous damping is encountered by bodies moving at moderate
speed through a liquid. This type of damping leads to a resisting force proportional to the
velocity. The damping force.
Fd α dx
dt
Fd = c x
When ‘c’ is the constant of proportionality and is called viscous damping Co-efficient with
the dimension of N-s/m.
Colomb Damping: - This type of damping arises from sliding of dry surfaces. The
friction force is nearly constant and depends upon the nature of sliding surface and normal
pressure between them as expressed by the equation of kinetic friction.
F = µ N
When µ = co- efficient of friction
N = normal force
Solid or Structural Damping:- Solid damping is also called structural damping and is due to internal friction within the
material itself. Experiment indicates that the solid damping differs from viscous damping in
that it is independent of frequency and proportional to maximum stress of vibration cycle.
The independence of solid damping frequency is illustrated by the fact that all frequencies of
vibrating bodies such as bell are damped almost equally.
Slip or Interfacial Damping Energy of vibration is dissipated by microscopic slip on the interfaces of machine parts in
contact under fluctuating loads. Microscopic slip also occurs on the interfaces of the machine
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 13 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
elements having various types of joints. The amount of damping depends amongst other
things upon the surface roughness of the mating parts, the contact pressure and the amplitude
of vibration. This type of damping is essentially of a non-linear type.
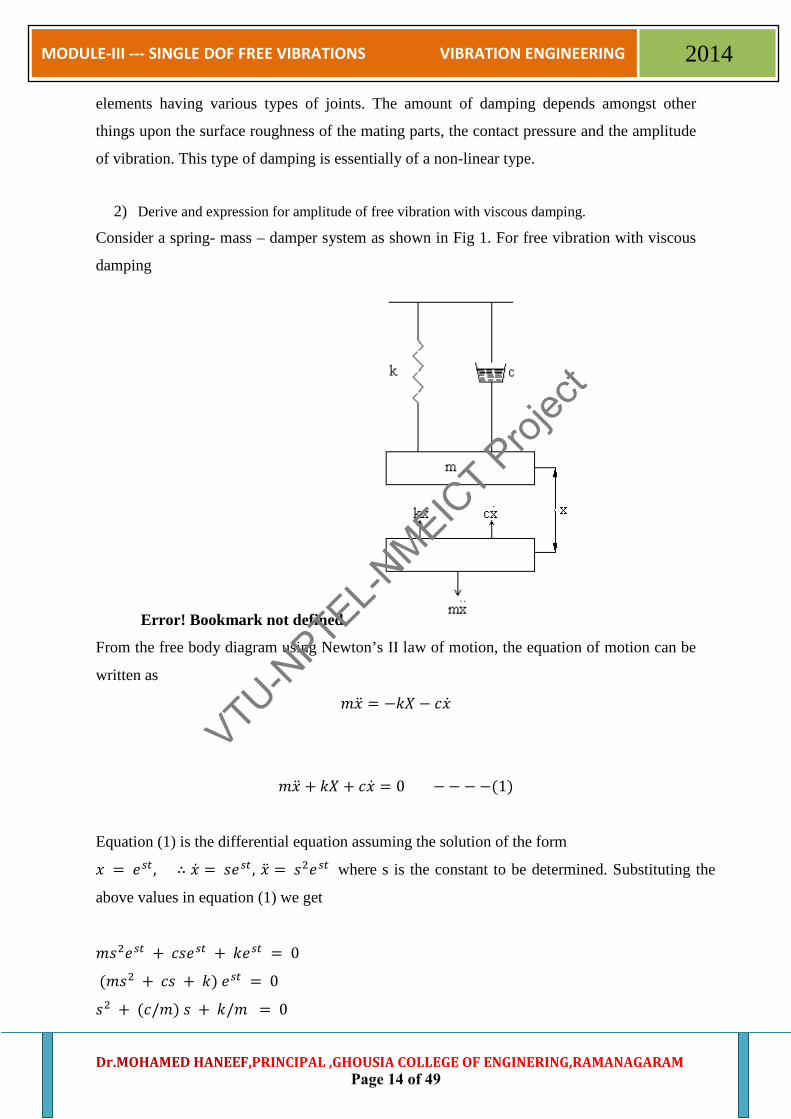
2) Derive and expression for amplitude of free vibration with viscous damping.
Consider a spring- mass – damper system as shown in Fig 1. For free vibration with viscous
damping
Error! Bookmark not defined.
From the free body diagram using Newton’s II law of motion, the equation of motion can be
written as
𝑚�̈� = −𝑘𝑋 − 𝑐�̇�
𝑚�̈� + 𝑘𝑋 + 𝑐�̇� = 0 −−−−(1)
Equation (1) is the differential equation assuming the solution of the form
𝑥 = 𝑒𝑠𝑡, ∴ �̇� = 𝑠𝑒𝑠𝑡 , �̈� = 𝑠2𝑒𝑠𝑡 where s is the constant to be determined. Substituting the
above values in equation (1) we get
𝑚𝑠2𝑒𝑠𝑡 + 𝑐𝑠𝑒𝑠𝑡 + 𝑘𝑒𝑠𝑡 = 0
(𝑚𝑠2 + 𝑐𝑠 + 𝑘) 𝑒𝑠𝑡 = 0
𝑠2 + (𝑐/𝑚) 𝑠 + 𝑘/𝑚 = 0
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 14 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
This is the quadrant equation, the solution of which is
𝑠1,2 =−(𝑐 𝑚⁄ ) ± �(𝑐 𝑚⁄ )2 − 4 × 1 × �𝑘 𝑚� �
2 × 1
𝑠1,2 = −�𝑐 2𝑚� � ± ��𝑐 2𝑚� �2− �𝑘 𝑚� � −−−−(2)
The general solution may be written as
𝑋 = 𝐴 𝑒 𝑠1𝑡 + 𝐵 𝑒𝑠2𝑡 −−−−− (3)
Where A & B are arbitrary integration constant which depends upon how the motion is
started.
Substitute equation (2) in equation (3)
𝑋 = 𝐴 𝑒 �−�𝑐 2𝑚� �+��𝑐 2𝑚� �2−�𝑘 𝑚� ��t
+ 𝐵 𝑒�−�𝑐 2𝑚� �−��𝑐 2𝑚� �2−�𝑘 𝑚� ��t
−−−−− (4)
The behavior of the system depends upon whether the radial of equation (4) is real, imaginary
or zero. When the damping term �𝑐 2𝑚� �2
> �𝑘 𝑚� � the exponents in the above equation are
real numbers and no oscillation are possible. We refer to this case as over damped
When the damping term�𝑐 2𝑚� �2
< �𝑘 𝑚� �, the exponents are imaginary, this case is known
as under damped.
In the limiting case between oscillatory and non oscillatory motion �𝑐 2𝑚� �2
= �𝑘 𝑚� �, and
the radical is zero. The damping corresponding to this case is called critical damping.
3) Define logarithmic decrement and prove that 𝛿 = 2𝜋𝜁
Ans) It is defined as the natural logarithmic ratio of any two successive amplitudes. It is
denoted by δ
Consider a damped free vibration express by the equation.
𝑋 = 𝑒−𝜁𝜔𝑛t{ 𝐶1𝑐𝑜𝑠𝜔𝑑t + 𝐶2𝑠𝑖𝑛 𝜔𝑑t }and the oscillatory motion as shown in fig
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 15 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
The logarithmic decrement
𝛿 = 𝑙𝑛 (𝑥1/𝑥2) = 𝑙𝑛 (𝑒− 𝜁 𝜔𝑛𝑡1/ 𝑒− 𝜁 𝜔𝑛𝑡2)
𝛿 = 𝑙𝑛 𝑒− 𝜁 𝜔𝑛(𝑡1−𝑡2)
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛(𝑡2−𝑡1)
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛𝑇
Where 𝑇 = (𝑡2 − 𝑡1), is the period of oscillation = 2𝜋/𝜔𝑑 = 2𝜋��1 − 𝜁 2�𝜔𝑛�
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛
2𝜋��1−𝜁 2�𝜔𝑛�
𝛿 = 2𝜋𝜁��1 − 𝜁 2��
For small values of ζ
𝛿 = 2𝜋𝜁
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 16 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
4) Define logarithmic decrement and show that it can be expressed as 𝛿 = 1𝑛𝑙𝑛 �𝑥0
𝑥𝑛�,
where n= number of cycles. 𝑥0 is the initial amplitude and 𝑥𝑛 is the amplitude after n cycles.
Ans)
Equation for displacement of an under damped system is given by
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅) −−−−(1)
Eqn (1) is ana equation for harmonic motion in which 𝑋𝑒−𝜁𝜔𝑛t is the amplitude and 𝜔𝑑 is the
angular frequency. When 𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅) is equal to one, the amplitude is maximum. Also the
amplitude will goes on reducing exponentially with tiem
The maximum amplitude is given by
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t
Let x1 be the maximum amplitude when time is t1 and x2 are the maximum amplitude when
time is t2.
Therefore
𝑥1 = 𝑋𝑒−𝜁𝜔𝑛t1
𝑎𝑛𝑑 𝑥2 = 𝑋𝑒−𝜁𝜔𝑛t2
𝑥1𝑥2
=𝑋𝑒−𝜁𝜔𝑛t1
𝑋𝑒−𝜁𝜔𝑛t2= 𝑒−𝜁𝜔𝑛(t2−t1) −−−−− (2)
Where (t2-t1) is the period of oscillation or time difference between two consecutive
amplitudes.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 17 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
∴ (t2 − t1) = tp =2𝜋𝜔𝑑
=2𝜋
𝜔𝑛��1 − 𝜁 2�
Substituting the value of tp in equation (2)
𝑥1𝑥2
= 𝑒𝜁𝜔𝑛
2𝜋𝜔𝑛��1−𝜁 2� = 𝑒
2𝜋𝜁�1−𝜁 2 −−−−(3)
Similarly it can be proved that
𝑥2𝑥3
= 𝑒2𝜋𝜁�1−𝜁 2 𝑎𝑛𝑑 𝑠𝑜. 𝑜𝑛
Now taking natural logarithmic on both sides
𝑙𝑛 �𝑥2𝑥3� =
2𝜋𝜁�1 − 𝜁 2
Logarithmic decrement
𝛿 = 𝑙𝑛 �𝑥2𝑥3� =
2𝜋𝜁�1 − 𝜁 2
−−−−(4)
Where 𝜁 is very small, 𝛿 ≅ 2𝜋𝜁
Also since
𝑥0𝑥𝑛
= �𝑥0𝑥𝑛�𝑛
; 𝑥0𝑥1
= �𝑥0𝑥𝑛�1𝑛
Therefore Logarithmic decrement
𝛿 = 𝑙𝑛 �𝑥0𝑥1� =
1𝑛𝑙𝑛 �
𝑥0𝑥𝑛� −−−−(5)
5) Explain over damping, under damping and critical damping with respect to viscous
damping of free vibrations.
Ans) Three cases of interest exists when
i) ζ >1
ii) ζ =1
iii) ζ <1
Case (i) when ζ >1 (large damping or over damping):
In this case the radical is real and always less than ζ . Hence the two roots S1 & S2 are
Negative therefore
𝑋 = 𝐴 𝑒 �–𝜁+�𝜁 2−1�𝜔𝑛t + 𝐵 𝑒�−𝜁−�𝜁 2−1�𝜔𝑛t
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 18 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
The displacement became the sum of two decaying components. The above equation
represents the case with very large damping, the motion is not periodic and no vibration takes
place. This type of vibration is also called as aperiodic vibration.
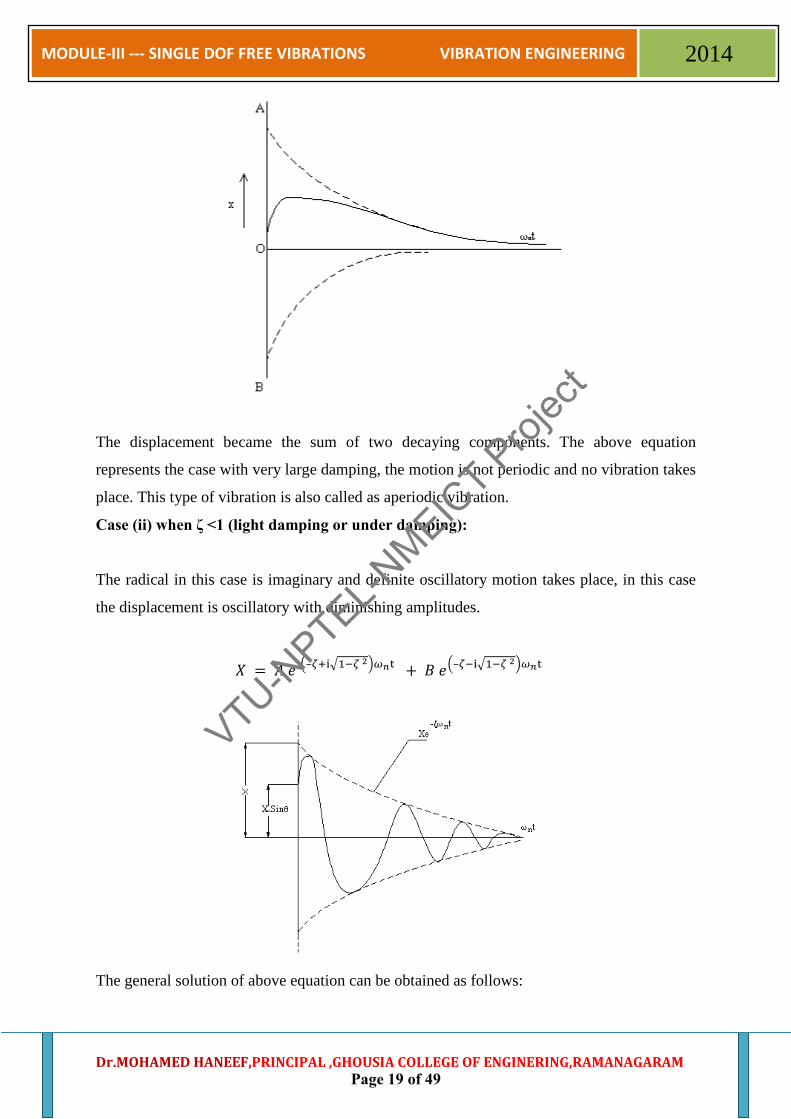
Case (ii) when ζ <1 (light damping or under damping):
The radical in this case is imaginary and definite oscillatory motion takes place, in this case
the displacement is oscillatory with diminishing amplitudes.
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
The general solution of above equation can be obtained as follows:
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 19 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
𝑋 = 𝑒−𝜁𝜔𝑛t � 𝐴 �𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + i sin ��1− 𝜁 2� 𝜔𝑛t� + 𝐵 �𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t − i sin ��1 − 𝜁 2�𝜔𝑛t��
𝑋 = 𝑒−𝜁𝜔𝑛t � (𝐴 + 𝐵)𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + (𝐴 − 𝐵)𝑖 𝑠𝑖𝑛 ��1 − 𝜁 2�𝜔𝑛t �
𝑋 = 𝑒−𝜁𝜔𝑛t � 𝐶1𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + 𝐶2𝑠𝑖𝑛 ��1 − 𝜁 2�𝜔𝑛t �
Where, C1= A+B & C2 = i (A-B)
𝑋 = 𝑒−𝜁𝜔𝑛t{ 𝐶1𝑐𝑜𝑠𝜔𝑑t + 𝐶2𝑠𝑖𝑛𝜔𝑑t }
Where 𝜔𝑑 = 𝑐𝑜𝑠��1 − 𝜁 2�𝜔𝑛is damped frequency
The term 𝜔𝑑 is the circular frequency of damped oscillation in radians/sec and damped time
period.
𝑇𝑑 =2𝜋𝜔𝑑
And damped frequency,
𝑓𝑑 =𝜔𝑑2𝜋
Equation (6) is the solution of the differential equation for small damping this can be written
as
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅)
= 𝑋𝑋𝑒−𝜁𝜔𝑛t 𝑆𝑖𝑛 [ ��1 − 𝜁 2�𝜔𝑛t + Ф ]
Where 𝑋 = �𝐶12 + 𝐶22
𝑡𝑎𝑛 Ф = (𝐶1 / 𝐶2)
Case (iii): ζ = 1[Critical damping or initial damping]: ζ = 1, represents the transition
between oscillatory and non- oscillatory condition. The amount of damping corresponds to
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 20 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
this case is referred to as critical or initial damping. Since the radical of equation (1) is zero
for critical damping, the two roots ζ1 & ζ2 are equal and alike.
𝑋 = (𝐴 + 𝐵)𝑒−𝜁𝜔𝑛t 𝑋 = 𝐶𝑒−𝜁𝜔𝑛t
Where C= A+B = constant
The above equation contains only one arbitrary constant. The solution lacks the required
number of independent constant to represent general solution. In this case a function of the
form te - ωnt will found to satisfy the differential equation. When substituting the general
solution can be written as
𝑋 = (𝐴 + 𝐵𝑡)𝑒−𝜁𝜔𝑛t
QUADRANT-3
Wikis: • en.wikipedia.org/wiki/Damping
• en.wikipedia.org/wiki/Damping_ratio
• wikis.controltheorypro.com/index.php?title=Viscous_Damping
• en.wikibooks.org/wiki/Vibrations_of.../Introduction_to_vibrations
• en.wikipedia.org/wiki/Logarithmic_decrement
• encyclopedia2.thefreedictionary.com/Logarithmic+Decrement
• encyclopedia2.thefreedictionary.com/Logarithmic+Decrement
Open Contents: (This includes wikis related to introduction to Vibration engineering contains practical application and research trends ,Harmonic & Periodic Motions)
• Mechanical Vibrations, S. S. Rao, Pearson Education Inc, 4th edition, 2003. • Mechanical Vibrations, V. P. Singh, Dhanpat Rai & Company, 3rd edition, 2006. • Mechanical Vibrations, G. K.Grover, Nem Chand and Bros, 6th edition, 1996 • Theory of vibration with applications ,W.T.Thomson,M.D.Dahleh and C
Padmanabhan,Pearson Education inc,5th Edition ,2008 • Theory and practice of Mechanical Vibration : J.S.Rao&K,Gupta,New Age
International Publications ,New Delhi,2001
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 21 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
QUADRANT-4
Problems
1) Find the equation of the motion for the system shown in fig. when (a) ζ = 1 ii) ζ = 0.3 and
iii) ζ = 2. If the mass m is displaced by a distance of 3cm and released.
Fig (1)
Given Data:
m=?
x=3 cm
Case: (i) ζ = 1
Case: (ii) ζ = 0.3
Case: (iii) ζ = 2
Solution:
Case: (i) ζ = 1
The Eq. of motion is given by
𝑋 = (𝐴 + 𝐵𝑡)𝑒−𝜁𝜔𝑛t
𝑋 = (𝐴 + 𝐵𝑡)𝑒−1×𝜔𝑛t = (𝐴 + 𝐵𝑡)𝑒−𝜔𝑛t at x=3 cm, and t=0
3 = �𝐴 + 𝐵(0)�𝑒0; A=3 cm 𝑋 = 𝐴 𝑒−𝜔𝑛t + 𝐵𝑡 𝑒−𝜔𝑛t
Differentiate the above equation w.r.t ‘t’, the velocity of motion is given by
�̇� = 𝐴 (−𝜔𝑛)𝑒−𝜔𝑛t + 𝐵𝑡 (−𝜔𝑛)𝑒−𝜔𝑛t + 𝐵 𝑒−𝜔𝑛t
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 22 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
At t = 0, �̇� = 0
𝐵 = 3𝜔𝑛
Substituting the value of A and B in equation of motion, we get
𝑿 = 𝟑(𝟏 + 𝝎𝒏𝒕) 𝒆−𝝎𝒏𝐭
Case: (ii) ζ = 0.3
Since ζ < 1, the system of motion will be under damped condition, Therefore equation of motion is
given by
𝑋 = 𝑒−𝜁𝜔𝑛t{ 𝐶1𝑐𝑜𝑠𝜔𝑑t + 𝐶2𝑠𝑖𝑛𝜔𝑑t }
Where 𝜔𝑑 = �√1 − 𝜁 2�𝜔𝑛 = (√1 − (0.3) 2)𝜔𝑛 = 0.95𝜔𝑛
At t= 0, x=3.
3 = 𝑒0{ 𝐶1𝑐𝑜𝑠0 + 𝐶2𝑠𝑖𝑛0 }
∴ 𝐶1 = 3
Velocity of motion is obtained by differentiating the above equation
𝑋 ̇ = 𝑒−𝜁𝜔𝑛t{−𝜔𝑑𝐶1𝑠𝑖𝑛𝜔𝑑t + 𝜔𝑑𝐶2𝑐𝑜𝑠𝜔𝑑t } + (−𝜁𝜔𝑛)t𝑒−𝜁𝜔𝑛t{ 𝐶1𝑐𝑜𝑠𝜔𝑑t + 𝐶2𝑠𝑖𝑛𝜔𝑑t }
At t= 0, �̇�=0 & 𝐶1 = 3;
𝑪𝟐 =𝟎.𝟗𝜔𝑛𝜔𝑑
=𝟎.𝟗𝜔𝑛0.95𝜔𝑛
[𝒔𝒊𝒏𝒄𝒆 𝜔𝑑 = 0.95𝜔𝑛]
𝑪𝟐 = 𝟎.𝟗𝟒𝟑 Substituting the value of 𝑪𝟏 and 𝑪𝟐 in equation of motion, we get
𝑋 = 𝑒−0.3𝜔𝑛t{ 3𝑐𝑜𝑠0.95𝜔𝑛t + 0.94𝑠𝑖𝑛0.95𝜔𝑛t }
Case: (iii) ζ = 2
Since ζ > 1, the system of motion will be over damped condition, Therefore equation of motion is
given by
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
𝑋 = 𝐴 𝑒 �–2+i√1−2 2�𝜔𝑛t + 𝐵 𝑒�–2−i√1−2 2�𝜔𝑛t
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 23 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
𝑋 = 𝐴 𝑒 −0.26𝜔𝑛t + 𝐵 𝑒−3.73𝜔𝑛t
At t= 0, x=3.
3 = 𝐴 + 𝐵 −−− (𝑎)
Velocity of motion is obtained by differentiating the above equation
�̇� = 𝐴 �– 𝜁 + i�1 − 𝜁 2�𝜔𝑛 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 �– 𝜁 − i�1 − 𝜁 2�𝜔𝑛𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
At t= 0, x=3
�̇� = 𝐴(−0.26)𝜔𝑛 𝑒 (–0.26)𝜔𝑛t + 𝐵 (– 3.73)𝜔𝑛𝑒(–3.73)𝜔𝑛t
0.26𝐴 + 3.73𝐵 = 0 − − −− − (𝑏)
Solving n Eq. (a) & (b), we get
A=3.232 & B=-0.224
Substituting the value of 𝑨 and 𝑩 in equation of motion, we get
�̇� = 3.232(−0.26)𝜔𝑛 𝑒 (–0.26)𝜔𝑛t − 0.224 (– 3.73)𝜔𝑛𝑒(–3.73)𝜔𝑛t
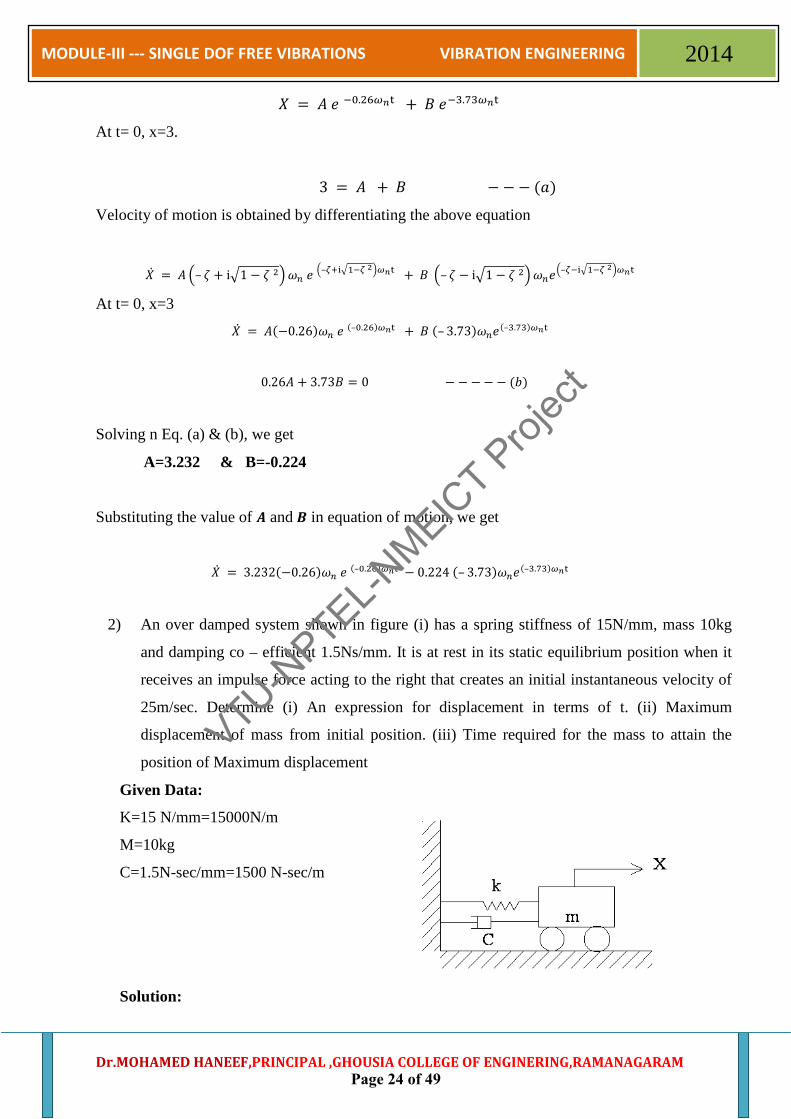
2) An over damped system shown in figure (i) has a spring stiffness of 15N/mm, mass 10kg
and damping co – efficient 1.5Ns/mm. It is at rest in its static equilibrium position when it
receives an impulse force acting to the right that creates an initial instantaneous velocity of
25m/sec. Determine (i) An expression for displacement in terms of t. (ii) Maximum
displacement of mass from initial position. (iii) Time required for the mass to attain the
position of Maximum displacement
Given Data:
K=15 N/mm=15000N/m
M=10kg
C=1.5N-sec/mm=1500 N-sec/m
Solution:
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 24 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
The general expiration for the given damped system is,
𝑚�̈� + 𝑐�̇� + 𝑘𝑋 = 0
10�̈� + 15000�̇� + 1500𝑋 = 0
�̈� + 150�̇� + 1500𝑋 = 0 − (1)
Characteristics equation of Eq. (1)
∝2+ 15000 ∝ +1500 = 0
For over damped system the roots are
∝1,2=−150 ± √1502 − 4 × 1 × 1500
2 × 1
∝1= −10.774; ∝2= −139.226
Now the general expression for over damped system is,
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
𝑋 = 𝐴 𝑒 ∝1t + 𝐵 𝑒∝2t
∝1= �– 𝜁 + i�1 − 𝜁 2�𝜔𝑛; ∝2= �– 𝜁 − i�1 − 𝜁 2�𝜔𝑛
∴ 𝑋 = 𝐴 𝑒 −10.774t + 𝐵 𝑒−139.226t
Velocity
∴ �̇� = −10.774𝐴 𝑒 −10.774t − 139.226 𝐵 𝑒−139.226t
Applying the initial condition
i,e. when t=0; x=0 and �̇� = 25 𝑚/𝑠𝑒𝑐
∴ 0 = 𝐴 + 𝐵
𝐴 = − 𝐵
Also
25 = −10.774(− 𝐵) − 139.226 𝐵
25 = −128.452 𝐵
𝐵 = −0.1946 𝑎𝑛𝑑 𝐴 = 0.1946
𝑋 = 0.1946(𝑒 −10.774t − 𝑒−139.226t ) 𝑚
(ii) For maximum displacement 𝑑𝑥𝑑𝑡
= 0; 𝑖. 𝑒. �̇� = 0
(0.1946)(−10.774)𝑒 −10.774t − (0.1946)(−139.226) 𝑒−139.226t = 0
27.093𝑒−139.226t = 2.097 𝑒 −10.774t
12.922 = 𝑒 (−10.774+139.226)t = 𝑒 (128.452)t
Taking natural logarithm on both side
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 25 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
𝑙𝑛12.922 = 128.452 𝑡
𝑡 = 0.01992 𝑠𝑒𝑐 ≅ 0.02𝑠𝑒𝑐
∴ Time required to attain maximum position
𝑡 = 0.02𝑠𝑒𝑐
(iii) Maximum displacement 𝑋𝑀𝑎𝑥 = 0.1946(𝑒 −10.774t − 𝑒−139.226t )
𝑋𝑀𝑎𝑥 = 0.145 𝑚
3) A gun barrel having mass 500 kg is designed with the following data. Initial recoil velocity
= 36m/s. Recoil distance on firing = 1.5m. Calculate (i) Spring constant (ii) Critical
damping co – efficient and iii) The time required for the barrel to return to a position 0.12m
from its initial position.
Given Data:
M=500 Kg
�̇� =36 m/s
𝑋 = 1.5 m
Solution:
The kinetic energy of the gun barrel must be equal to potential energy of the spring
K.E = P.E 12𝑚�̇�2 =
12𝐾𝑥2
12
500(302) =12𝐾(1.52)
𝐾 = 2.88 × 105𝑁/𝑚
𝐶 = 2 𝜁𝑚𝜔𝑛
𝐶𝑐 = 2 𝑚𝜔𝑛
𝜔𝑛 = �𝑘 𝑚�
𝜔𝑛 = �2.88 × 105
500� = 24 𝑟𝑎𝑑/𝑠𝑒𝑐
𝐶𝑐 = 2 (500)(24) = 2.4 × 104 𝑁 − 𝑠 𝑚�
To find the value of t for the given value at initial position t=0 since critical damping
𝑋 = (𝐴 + 𝐵𝑡)𝑒−𝜔𝑛t
The initial conditions are
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 26 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
x=1.5; at t=0 �̇� = 0; 𝑎𝑡 𝑡 = 0 The equation of motion become
1.5 = (𝐴 + 𝐵(0))𝑒0
𝐴 = 1.5
Differentiating equation of motion we get:
𝑋 ̇ = (𝐴 + 𝐵𝑡)(−𝜔𝑛)𝑒−𝜔𝑛t + 𝐵𝑒−𝜔𝑛t
0 = �1.5 + 𝐵(0)�(−𝜔𝑛)𝑒0 + 𝐵𝑒0
0 = (1.5)(−𝜔𝑛) + 𝐵
0 = (1.5)(−24) + 𝐵
B=36
𝑋 = (1.5 + 36𝑡)𝑒−24t
Taking x=0.2m
0.2 = (1.5 + 36𝑡)𝑒−24t Taking natural logarithm on both sides we get
t = 0.17 sec
4) A vibrating system of 4.534 kg, a spring of stiffness 3500 N/m and a dash pot having damping
Co efficient 1.243 N-s/m. Find
(i) Damping factor
(ii) Logarithmic decrement
(iii) Ratio of any two successive amplitudes
Given Data:
m=4.534 kg
K= 3500 N/m
C=1.243 N-s/m
𝐶𝑐 = 2 𝑚𝜔𝑛
𝜔𝑛 = �𝑘 𝑚� = 27.79 𝑟𝑎𝑑/𝑠𝑒𝑐
𝜁 = 𝐶2 𝑚𝜔𝑛
= 4.93 × 10−3
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 27 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
𝛿 =2𝜋𝜁
�1 − 𝜁 2 = 0.031
𝑙𝑛 �𝑥1𝑥2� = 𝛿
𝑥1𝑥2
= 𝑒𝛿 = 𝑒0.031 = 1.031
5) A mass of single degree damped vibrating system is 75 kg and makes 24 free oscillation in
14sec and disturb from its equilibrium position. The amplitude of vibration reduces to 0.25
of its initial value after 5 oscillations. Determine
(i) Stiffness of spring
(ii) Logarithmic decrement
(iii) Damping factor
Given Data:
m=75 kg
Number of oscillations = 24
t=14 sec
𝑥6 = 0.25𝑥1
Solution:
𝒇𝒏 =Number of oscillations
𝒕= 𝟐𝟒𝟏𝟒
= 𝟏.𝟕𝟏 𝒄𝒚𝒄𝒍𝒆𝒔 /𝒔𝒆𝒄
𝛿 = 𝑙𝑛 �𝑥1𝑥6� = 𝑙𝑛 �
10.25
� = 0.277
ωn = fn (2π) = 10.74 rad/sec
𝜔𝑛 = �𝑘 𝑚� = 10.74
�𝑘 75� = 10.74
K=8651.07 N/m
𝜁 =𝛿
√4𝜋2 − 𝛿2= 0.042
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 28 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
Frequently asked Questions.
1) Explain the following types of damping
e) Viscous damping
f) Coulomb damping
g) Structural damping or solid damping
h) Slip or Interfacial damping Derive and expression for amplitude of free vibration with viscous damping.
2) Explain over damping, under damping and critical damping with respect to viscous damping
of free vibrations.
3) Discuss the response of under damped, over damped, critically damped systems using
relevant response equations and curves.
4) Define logarithmic decrement. And derive the expression for the same.
5) Define the following
a) Damping factor
b) Natural frequency of damped vibrations
c) Logarithmic decrement
d) Damping ratio
6) Define logarithmic decrement and prove that 𝛿 = 2𝜋𝜁
7) Define logarithmic decrement and show that it can be expressed as 𝛿 = 1𝑛𝑙𝑛 �𝑥0
𝑥𝑛�, where n=
number of cycles. 𝑥0 is the initial amplitude and 𝑥𝑛 is the amplitude after n cycles.
8) Develop the expression for Logarithmic decrement 𝛿 in terms of displacement X1 and
Xn+1 which are ‘n’ cycles apart on the plot of displacement Vs time.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 29 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
Self Answered Question & Answer
1) Define logarithmic decrement and prove that 𝛿 = 2𝜋𝜁
Ans) It is defined as the natural logarithmic ratio of any two successive amplitudes. It is
denoted by δ
Consider a damped free vibration express by the equation.
𝑋 = 𝑒−𝜁𝜔𝑛t{ 𝐶1𝑐𝑜𝑠𝜔𝑑t + 𝐶2𝑠𝑖𝑛 𝜔𝑑t }and the oscillatory motion as shown in fig
The logarithmic decrement
𝛿 = 𝑙𝑛 (𝑥1/𝑥2) = 𝑙𝑛 (𝑒− 𝜁 𝜔𝑛𝑡1/ 𝑒− 𝜁 𝜔𝑛𝑡2)
𝛿 = 𝑙𝑛 𝑒− 𝜁 𝜔𝑛(𝑡1−𝑡2)
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛(𝑡2−𝑡1)
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛𝑇
Where 𝑇 = (𝑡2 − 𝑡1), is the period of oscillation = 2𝜋/𝜔𝑑 = 2𝜋��1 − 𝜁 2�𝜔𝑛�
𝛿 = 𝑙𝑛 𝑒𝜁 𝜔𝑛
2𝜋��1−𝜁 2�𝜔𝑛�
𝛿 = 2𝜋𝜁��1 − 𝜁 2��
For small values of ζ
𝛿 = 2𝜋𝜁
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 30 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
2) Define logarithmic decrement and show that it can be expressed as 𝛿 = 1𝑛𝑙𝑛 �𝑥0
𝑥𝑛�,
where n= number of cycles. 𝑥0 is the initial amplitude and 𝑥𝑛 is the amplitude after n
cycles.
Ans)
Equation for displacement of an under damped system is given by
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅) −−−−(1)
Eqn (1) is ana equation for harmonic motion in which 𝑋𝑒−𝜁𝜔𝑛t is the amplitude and 𝜔𝑑 is the
angular frequency. When 𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅) is equal to one, the amplitude is maximum. Also the
amplitude will goes on reducing exponentially with tiem
The maximum amplitude is given by
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t
Let x1 be the maximum amplitude when time is t1 and x2 are the maximum amplitude when
time is t2.
Therefore
𝑥1 = 𝑋𝑒−𝜁𝜔𝑛t1
𝑎𝑛𝑑 𝑥2 = 𝑋𝑒−𝜁𝜔𝑛t2
𝑥1𝑥2
=𝑋𝑒−𝜁𝜔𝑛t1
𝑋𝑒−𝜁𝜔𝑛t2= 𝑒−𝜁𝜔𝑛(t2−t1) −−−−− (2)
Where (t2-t1) is the period of oscillation or time difference between two consecutive
amplitudes.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 31 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
∴ (t2 − t1) = tp =2𝜋𝜔𝑑
=2𝜋
𝜔𝑛��1 − 𝜁 2�
Substituting the value of tp in equation (2)
𝑥1𝑥2
= 𝑒𝜁𝜔𝑛
2𝜋𝜔𝑛��1−𝜁 2� = 𝑒
2𝜋𝜁�1−𝜁 2 −−−−(3)
Similarly it can be proved that
𝑥2𝑥3
= 𝑒2𝜋𝜁�1−𝜁 2 𝑎𝑛𝑑 𝑠𝑜. 𝑜𝑛
Now taking natural logarithmic on both sides
𝑙𝑛 �𝑥2𝑥3� =
2𝜋𝜁�1 − 𝜁 2
Logarithmic decrement
𝛿 = 𝑙𝑛 �𝑥2𝑥3� =
2𝜋𝜁�1 − 𝜁 2
−−−−(4)
Where 𝜁 is very small, 𝛿 ≅ 2𝜋𝜁
Also since
𝑥0𝑥𝑛
= �𝑥0𝑥𝑛�𝑛
; 𝑥0𝑥1
= �𝑥0𝑥𝑛�1𝑛
Therefore Logarithmic decrement
𝛿 = 𝑙𝑛 �𝑥0𝑥1� =
1𝑛𝑙𝑛 �
𝑥0𝑥𝑛� −−−−(5)
3) Explain over damping, under damping and critical damping with respect to viscous
damping of free vibrations.
Ans) Three cases of interest exists when
i) ζ >1
ii) ζ =1
iii) ζ <1
Case (i) when ζ >1 (large damping or over damping):
In this case the radical is real and always less than ζ . Hence the two roots S1 & S2 are
Negative therefore
𝑋 = 𝐴 𝑒 �–𝜁+�𝜁 2−1�𝜔𝑛t + 𝐵 𝑒�−𝜁−�𝜁 2−1�𝜔𝑛t
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 32 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
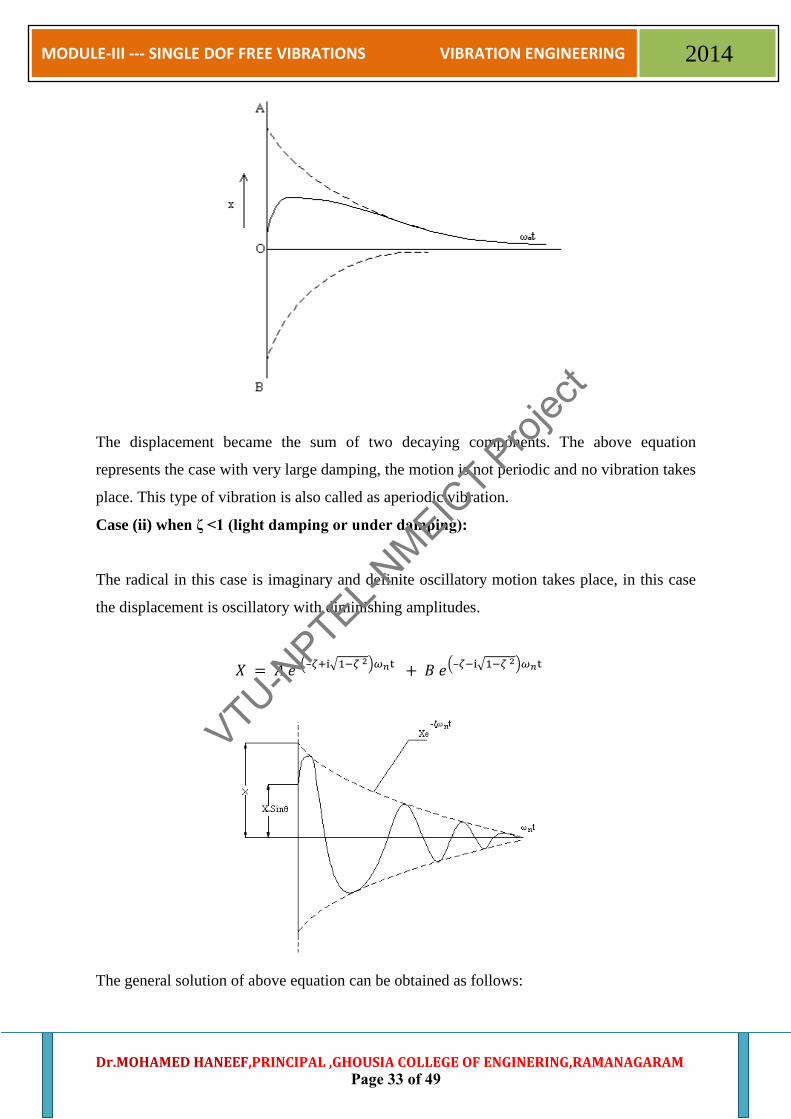
The displacement became the sum of two decaying components. The above equation
represents the case with very large damping, the motion is not periodic and no vibration takes
place. This type of vibration is also called as aperiodic vibration.
Case (ii) when ζ <1 (light damping or under damping):
The radical in this case is imaginary and definite oscillatory motion takes place, in this case
the displacement is oscillatory with diminishing amplitudes.
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
The general solution of above equation can be obtained as follows:
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 33 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
𝑋 = 𝑒−𝜁𝜔𝑛t � 𝐴 �𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + i sin ��1− 𝜁 2� 𝜔𝑛t� + 𝐵 �𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t − i sin ��1 − 𝜁 2�𝜔𝑛t��
𝑋 = 𝑒−𝜁𝜔𝑛t � (𝐴 + 𝐵)𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + (𝐴 − 𝐵)𝑖 𝑠𝑖𝑛 ��1 − 𝜁 2�𝜔𝑛t �
𝑋 = 𝑒−𝜁𝜔𝑛t � 𝐶1𝑐𝑜𝑠 ��1 − 𝜁 2�𝜔𝑛t + 𝐶2𝑠𝑖𝑛 ��1 − 𝜁 2�𝜔𝑛t �
Where, C1= A+B & C2 = i (A-B)
𝑋 = 𝑒−𝜁𝜔𝑛t{ 𝐶1𝑐𝑜𝑠𝜔𝑑t + 𝐶2𝑠𝑖𝑛𝜔𝑑t }
Where 𝜔𝑑 = 𝑐𝑜𝑠��1 − 𝜁 2�𝜔𝑛is damped frequency
The term 𝜔𝑑 is the circular frequency of damped oscillation in radians/sec and damped time
period.
𝑇𝑑 =2𝜋𝜔𝑑
And damped frequency,
𝑓𝑑 =𝜔𝑑2𝜋
Equation (6) is the solution of the differential equation for small damping this can be written
as
𝑥 = 𝑋𝑒−𝜁𝜔𝑛t𝑠𝑖𝑛(𝜔𝑑𝑡 + ∅)
= 𝑋𝑋𝑒−𝜁𝜔𝑛t 𝑆𝑖𝑛 [ ��1 − 𝜁 2�𝜔𝑛t + Ф ]
Where 𝑋 = �𝐶12 + 𝐶22
𝑡𝑎𝑛 Ф = (𝐶1 / 𝐶2)
Case (iii): ζ = 1[Critical damping or initial damping]: ζ = 1, represents the transition
between oscillatory and non- oscillatory condition. The amount of damping corresponds to
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 34 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
this case is referred to as critical or initial damping. Since the radical of equation (1) is zero
for critical damping, the two roots ζ1 & ζ2 are equal and alike.
𝑋 = (𝐴 + 𝐵)𝑒−𝜁𝜔𝑛t 𝑋 = 𝐶𝑒−𝜁𝜔𝑛t
Where C= A+B = constant
The above equation contains only one arbitrary constant. The solution lacks the required
number of independent constant to represent general solution. In this case a function of the
form te - ωnt will found to satisfy the differential equation. When substituting the general
solution can be written as
𝑋 = (𝐴 + 𝐵𝑡)𝑒−𝜁𝜔𝑛t
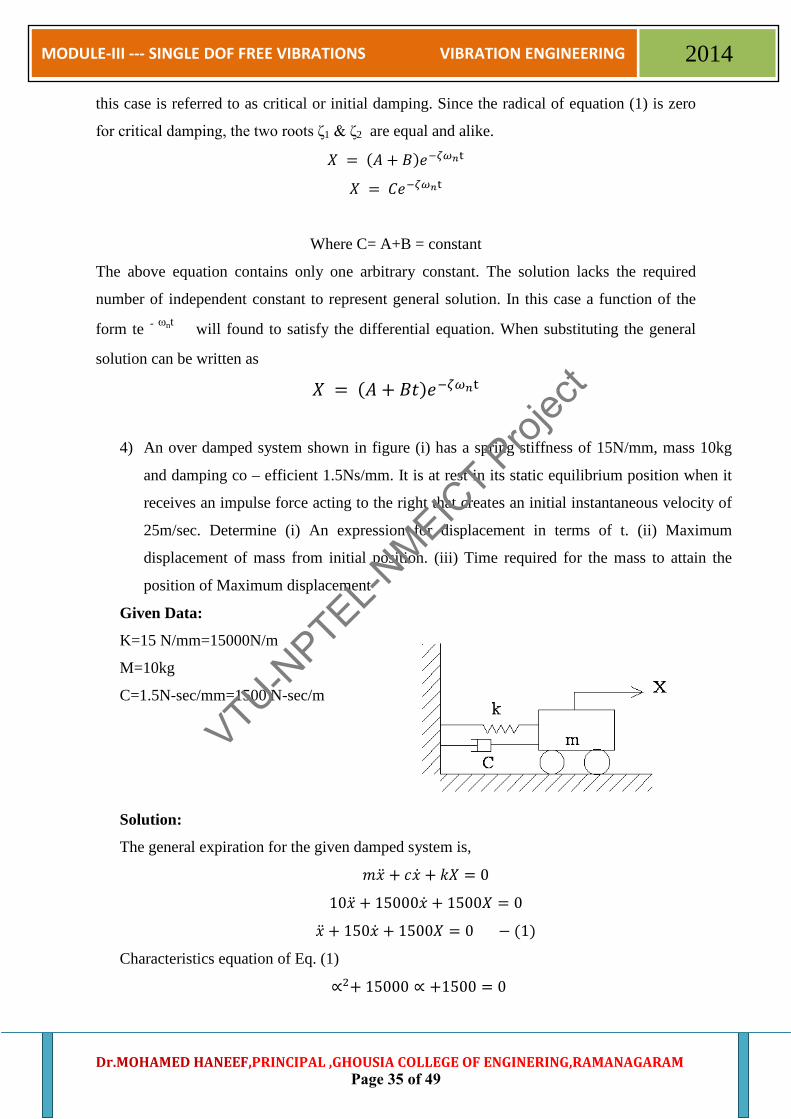
4) An over damped system shown in figure (i) has a spring stiffness of 15N/mm, mass 10kg
and damping co – efficient 1.5Ns/mm. It is at rest in its static equilibrium position when it
receives an impulse force acting to the right that creates an initial instantaneous velocity of
25m/sec. Determine (i) An expression for displacement in terms of t. (ii) Maximum
displacement of mass from initial position. (iii) Time required for the mass to attain the
position of Maximum displacement
Given Data:
K=15 N/mm=15000N/m
M=10kg
C=1.5N-sec/mm=1500 N-sec/m
Solution:
The general expiration for the given damped system is,
𝑚�̈� + 𝑐�̇� + 𝑘𝑋 = 0
10�̈� + 15000�̇� + 1500𝑋 = 0
�̈� + 150�̇� + 1500𝑋 = 0 − (1)
Characteristics equation of Eq. (1)
∝2+ 15000 ∝ +1500 = 0
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 35 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
For over damped system the roots are
∝1,2=−150 ± √1502 − 4 × 1 × 1500
2 × 1
∝1= −10.774; ∝2= −139.226
Now the general expression for over damped system is,
𝑋 = 𝐴 𝑒 �–𝜁+i�1−𝜁 2�𝜔𝑛t + 𝐵 𝑒�–𝜁−i�1−𝜁 2�𝜔𝑛t
𝑋 = 𝐴 𝑒 ∝1t + 𝐵 𝑒∝2t
∝1= �– 𝜁 + i�1 − 𝜁 2�𝜔𝑛; ∝2= �– 𝜁 − i�1 − 𝜁 2�𝜔𝑛
∴ 𝑋 = 𝐴 𝑒 −10.774t + 𝐵 𝑒−139.226t
Velocity
∴ �̇� = −10.774𝐴 𝑒 −10.774t − 139.226 𝐵 𝑒−139.226t
Applying the initial condition
i,e. when t=0; x=0 and �̇� = 25 𝑚/𝑠𝑒𝑐
∴ 0 = 𝐴 + 𝐵
𝐴 = − 𝐵
Also
25 = −10.774(− 𝐵) − 139.226 𝐵
25 = −128.452 𝐵
𝐵 = −0.1946 𝑎𝑛𝑑 𝐴 = 0.1946
𝑋 = 0.1946(𝑒 −10.774t − 𝑒−139.226t ) 𝑚
(ii) For maximum displacement 𝑑𝑥𝑑𝑡
= 0; 𝑖. 𝑒. �̇� = 0
(0.1946)(−10.774)𝑒 −10.774t − (0.1946)(−139.226) 𝑒−139.226t = 0
27.093𝑒−139.226t = 2.097 𝑒 −10.774t
12.922 = 𝑒 (−10.774+139.226)t = 𝑒 (128.452)t
Taking natural logarithm on both side
𝑙𝑛12.922 = 128.452 𝑡
𝑡 = 0.01992 𝑠𝑒𝑐 ≅ 0.02𝑠𝑒𝑐
∴ Time required to attain maximum position
𝑡 = 0.02𝑠𝑒𝑐
(iii) Maximum displacement 𝑋𝑀𝑎𝑥 = 0.1946(𝑒 −10.774t − 𝑒−139.226t )
𝑋𝑀𝑎𝑥 = 0.145 𝑚
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 36 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
5) A gun barrel having mass 500 kg is designed with the following data. Initial recoil velocity
= 36m/s. Recoil distance on firing = 1.5m. Calculate (i) Spring constant (ii) Critical
damping co – efficient and iii) The time required for the barrel to return to a position 0.12m
from its initial position.
Given Data:
M=500 Kg
�̇� =36 m/s
𝑋 = 1.5 m
Solution:
The kinetic energy of the gun barrel must be equal to potential energy of the spring
K.E = P.E 12𝑚�̇�2 =
12𝐾𝑥2
12
500(302) =12𝐾(1.52)
𝐾 = 2.88 × 105𝑁/𝑚
𝐶 = 2 𝜁𝑚𝜔𝑛
𝐶𝑐 = 2 𝑚𝜔𝑛
𝜔𝑛 = �𝑘 𝑚�
𝜔𝑛 = �2.88 × 105
500� = 24 𝑟𝑎𝑑/𝑠𝑒𝑐
𝐶𝑐 = 2 (500)(24) = 2.4 × 104 𝑁 − 𝑠 𝑚�
To find the value of t for the given value at initial position t=0 since critical damping
𝑋 = (𝐴 + 𝐵𝑡)𝑒−𝜔𝑛t
The initial conditions are
x=1.5; at t=0 �̇� = 0; 𝑎𝑡 𝑡 = 0 The equation of motion become
1.5 = (𝐴 + 𝐵(0))𝑒0
𝐴 = 1.5
Differentiating equation of motion we get:
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 37 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
𝑋 ̇ = (𝐴 + 𝐵𝑡)(−𝜔𝑛)𝑒−𝜔𝑛t + 𝐵𝑒−𝜔𝑛t
0 = �1.5 + 𝐵(0)�(−𝜔𝑛)𝑒0 + 𝐵𝑒0
0 = (1.5)(−𝜔𝑛) + 𝐵
0 = (1.5)(−24) + 𝐵
B=36
𝑋 = (1.5 + 36𝑡)𝑒−24t
Taking x=0.2m
0.2 = (1.5 + 36𝑡)𝑒−24t Taking natural logarithm on both sides we get
t = 0.17 sec
6) A vibrating system of 4.534 kg, a spring of stiffness 3500 N/m and a dash pot having damping
Co efficient 1.243 N-s/m. Find
(iv) Damping factor
(v) Logarithmic decrement
(vi) Ratio of any two successive amplitudes
Given Data:
m=4.534 kg
K= 3500 N/m
C=1.243 N-s/m
𝐶𝑐 = 2 𝑚𝜔𝑛
𝜔𝑛 = �𝑘 𝑚� = 27.79 𝑟𝑎𝑑/𝑠𝑒𝑐
𝜁 = 𝐶2 𝑚𝜔𝑛
= 4.93 × 10−3
𝛿 =2𝜋𝜁
�1 − 𝜁 2 = 0.031
𝑙𝑛 �𝑥1𝑥2� = 𝛿
𝑥1𝑥2
= 𝑒𝛿 = 𝑒0.031 = 1.031
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 38 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
7) A mass of single degree damped vibrating system is 75 kg and makes 24 free oscillation in
14sec and disturb from its equilibrium position. The amplitude of vibration reduces to 0.25
of its initial value after 5 oscillations. Determine
a. Stiffness of spring
b. Logarithmic decrement
c. Damping factor
Given Data:
m=75 kg
Number of oscillations = 24
t=14 sec
𝑥6 = 0.25𝑥1
Solution:
𝒇𝒏 =Number of oscillations
𝒕= 𝟐𝟒𝟏𝟒
= 𝟏.𝟕𝟏 𝒄𝒚𝒄𝒍𝒆𝒔 /𝒔𝒆𝒄
𝛿 = 𝑙𝑛 �𝑥1𝑥6� = 𝑙𝑛 �
10.25
� = 0.277
ωn = fn (2π) = 10.74 rad/sec
𝜔𝑛 = �𝑘 𝑚� = 10.74
�𝑘 75� = 10.74
K=8651.07 N/m
𝜁 =𝛿
√4𝜋2 − 𝛿2= 0.042
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 39 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
Assignment
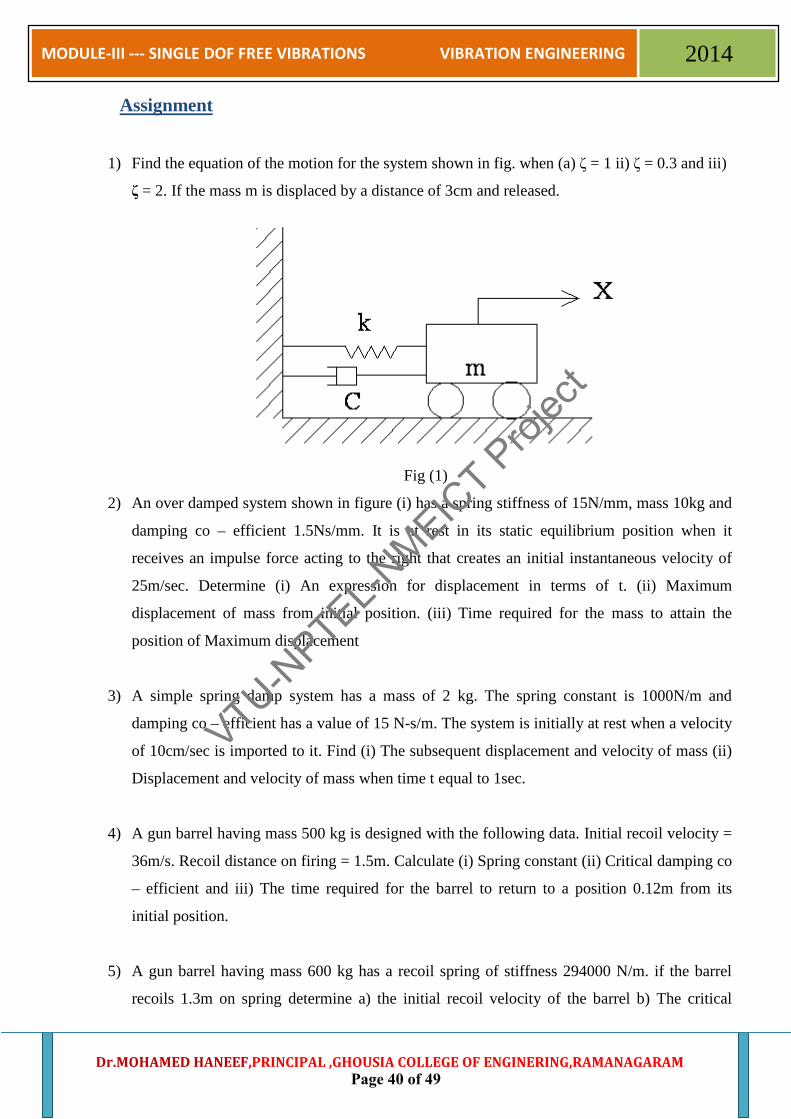
1) Find the equation of the motion for the system shown in fig. when (a) ζ = 1 ii) ζ = 0.3 and iii)
ζ = 2. If the mass m is displaced by a distance of 3cm and released.
Fig (1)
2) An over damped system shown in figure (i) has a spring stiffness of 15N/mm, mass 10kg and
damping co – efficient 1.5Ns/mm. It is at rest in its static equilibrium position when it
receives an impulse force acting to the right that creates an initial instantaneous velocity of
25m/sec. Determine (i) An expression for displacement in terms of t. (ii) Maximum
displacement of mass from initial position. (iii) Time required for the mass to attain the
position of Maximum displacement
3) A simple spring damp system has a mass of 2 kg. The spring constant is 1000N/m and
damping co – efficient has a value of 15 N-s/m. The system is initially at rest when a velocity
of 10cm/sec is imported to it. Find (i) The subsequent displacement and velocity of mass (ii)
Displacement and velocity of mass when time t equal to 1sec.
4) A gun barrel having mass 500 kg is designed with the following data. Initial recoil velocity =
36m/s. Recoil distance on firing = 1.5m. Calculate (i) Spring constant (ii) Critical damping co
– efficient and iii) The time required for the barrel to return to a position 0.12m from its
initial position.
5) A gun barrel having mass 600 kg has a recoil spring of stiffness 294000 N/m. if the barrel
recoils 1.3m on spring determine a) the initial recoil velocity of the barrel b) The critical
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 40 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
damping co-efficient of the dish pot which is engaged at the end of the recoil spring. c) The
time required for the barrel to a return to a position 5cm from the initial position.
6) The vibrating system consists mass of 2 kg and spring stiffness 3 KN/m viscously damped
such that ratio of any two consecutive amplitudes is 1.00 to 0.98. determine
a. Natural frequency
b. Logarithmic decrement
c. Damping factor
d. Damping Co - efficient
7) A vibrating system of 4.534 kg, a spring of stiffness 3500 N/m and a dash pot having
damping Co efficient 1.243 N-s/m. Find
a. Damping factor
b. Logarithmic decrement
c. Ratio of any two successive amplitudes
8) A mass of single degree damped vibrating system is 75 kg and makes 24 free oscillation in
14sec and disturb from its equilibrium position. The amplitude of vibration reduces to 0.25 of
its initial value after 5 oscillations. Determine
a. Stiffness of spring
b. Logarithmic decrement
c. Damping factor
9) A vibrating system in a vehicle is to be designed with the following parameters
K= 100N/m, C= 2N-S/m m= 1 kg. Calculate 1) the decrease of amplitude from its starting
value after 3 complete oscillation and 2) the frequency of oscillation.
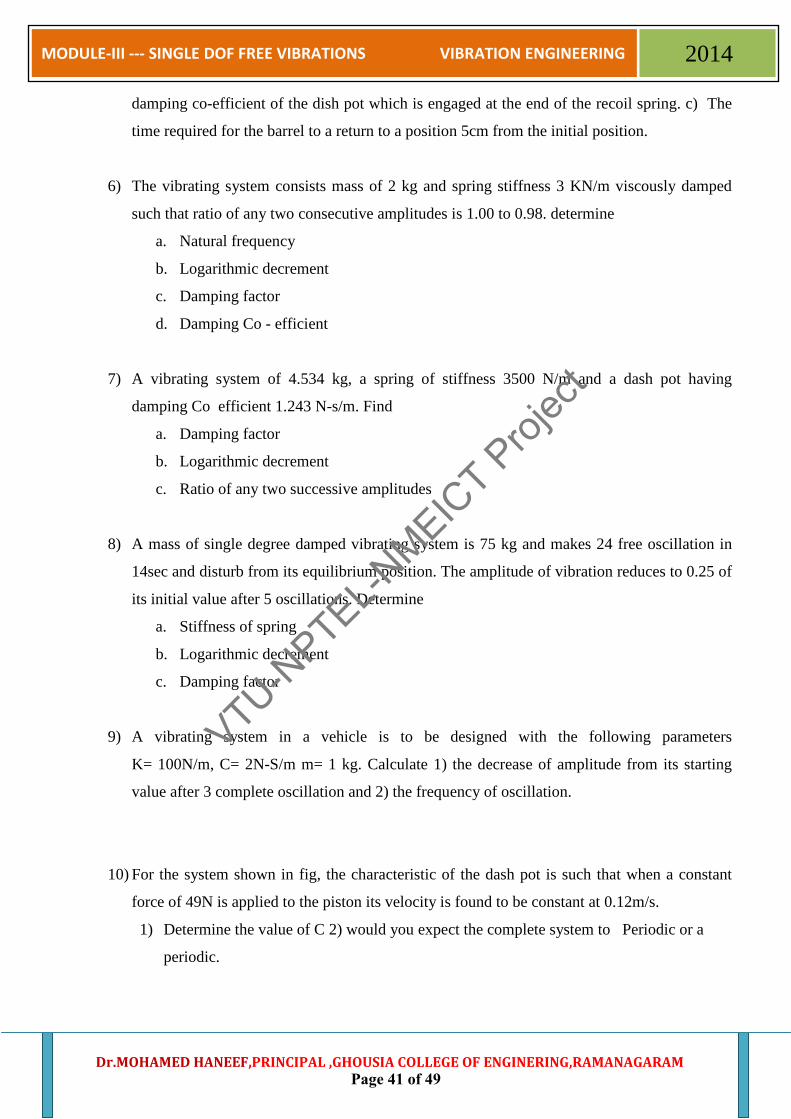
10) For the system shown in fig, the characteristic of the dash pot is such that when a constant
force of 49N is applied to the piston its velocity is found to be constant at 0.12m/s.
1) Determine the value of C 2) would you expect the complete system to Periodic or a
periodic.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 41 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
11) A damper offers resistance 0.05N at constant velocity 0.04m/s. the damper is used with K=
9N/m. Determine the damping frequency of the system when the mass of the system is 10kg.
12) A vibrating system is defined by the following parameters m = 3 kg K= 100N/m C= 3N-S/m.
determine a) damping factor b) the natural frequency of damped vibrations c) the ratio of two
consecutive amplitudes e) The number of cycles after which the original amplitude is reduced
to 20%.
13) The damped vibration record of a spring mass dash pot system shows the following data
Amplitude on second cycle = 1.2cm
Amplitude on third cycle = 1.05cm
Spring constant = 80N/cm
Mass of spring = 2kg
Determine the damping constant, causing the viscous damping.
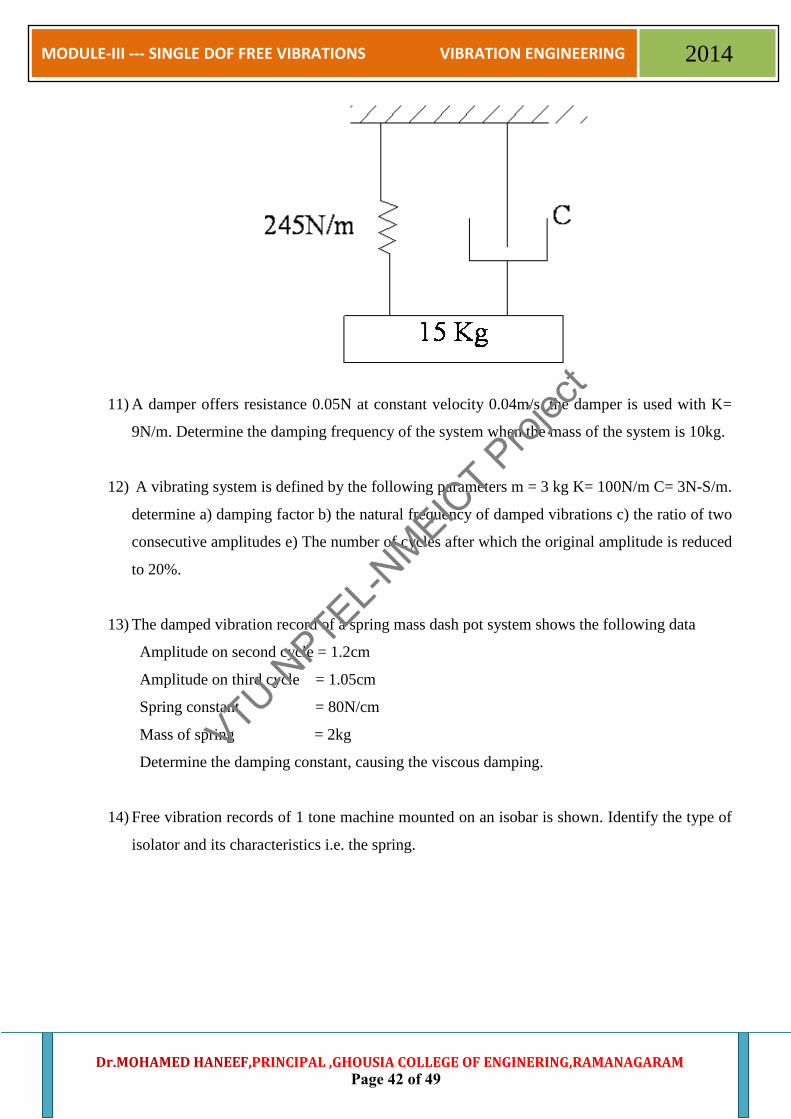
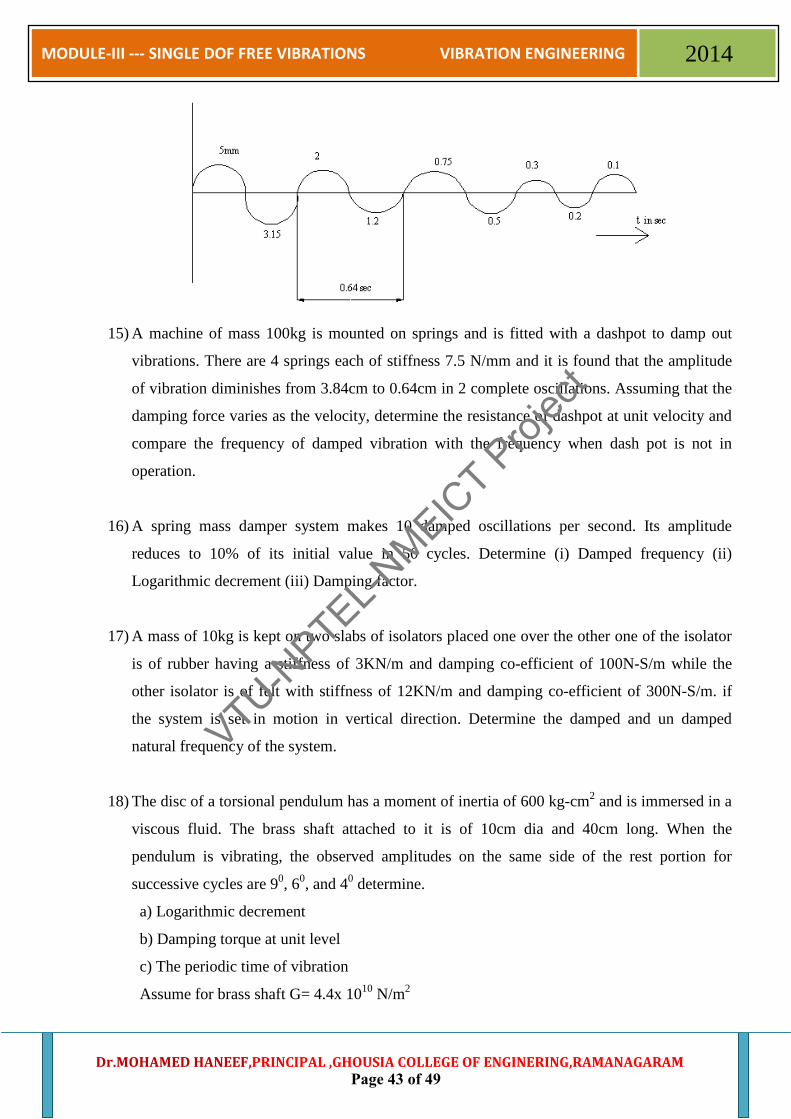
14) Free vibration records of 1 tone machine mounted on an isobar is shown. Identify the type of
isolator and its characteristics i.e. the spring.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 42 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
15) A machine of mass 100kg is mounted on springs and is fitted with a dashpot to damp out
vibrations. There are 4 springs each of stiffness 7.5 N/mm and it is found that the amplitude
of vibration diminishes from 3.84cm to 0.64cm in 2 complete oscillations. Assuming that the
damping force varies as the velocity, determine the resistance of dashpot at unit velocity and
compare the frequency of damped vibration with the frequency when dash pot is not in
operation.
16) A spring mass damper system makes 10 damped oscillations per second. Its amplitude
reduces to 10% of its initial value in 50 cycles. Determine (i) Damped frequency (ii)
Logarithmic decrement (iii) Damping factor.
17) A mass of 10kg is kept on two slabs of isolators placed one over the other one of the isolator
is of rubber having a stiffness of 3KN/m and damping co-efficient of 100N-S/m while the
other isolator is of felt with stiffness of 12KN/m and damping co-efficient of 300N-S/m. if
the system is set in motion in vertical direction. Determine the damped and un damped
natural frequency of the system.
18) The disc of a torsional pendulum has a moment of inertia of 600 kg-cm2 and is immersed in a
viscous fluid. The brass shaft attached to it is of 10cm dia and 40cm long. When the
pendulum is vibrating, the observed amplitudes on the same side of the rest portion for
successive cycles are 90, 60, and 40 determine.
a) Logarithmic decrement
b) Damping torque at unit level
c) The periodic time of vibration
Assume for brass shaft G= 4.4x 1010 N/m2
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 43 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
19) A torsional pendulum when immersed in oil indicates its natural frequency as 200Hz. But
when it was put to vibrate in vacuum having no damping its natural frequency was observed
as 250 Hz. Find the value of damping factor of oil.
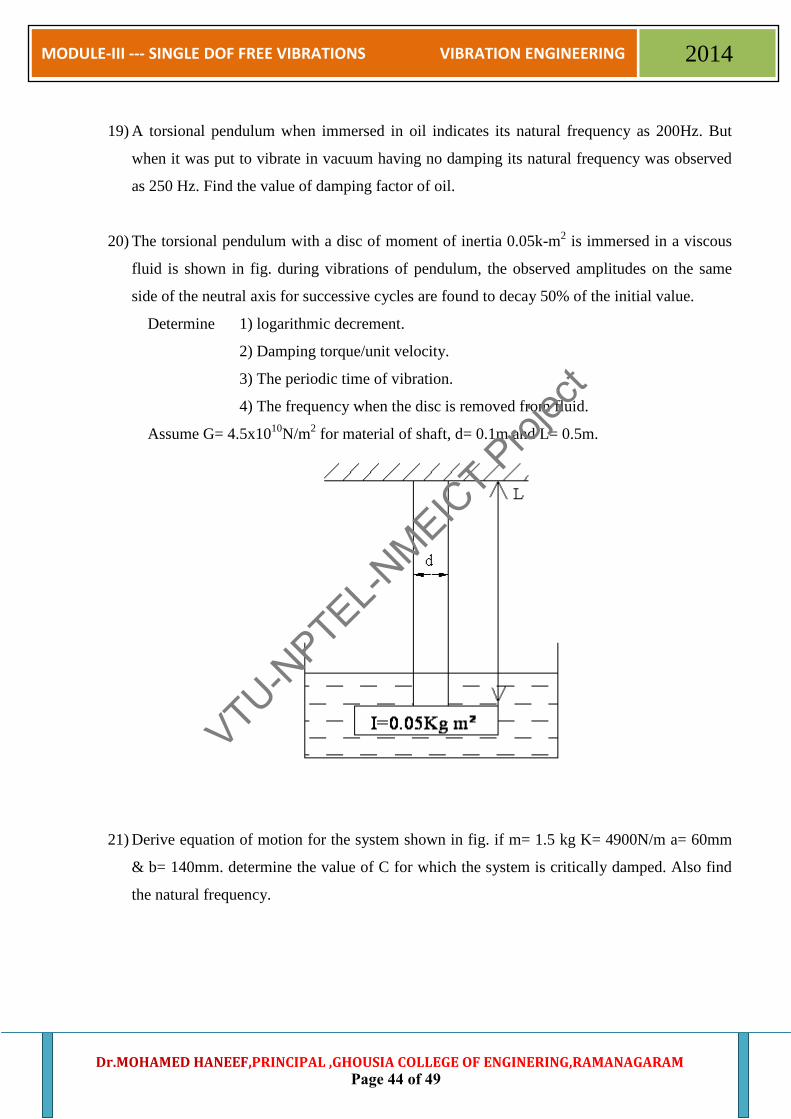
20) The torsional pendulum with a disc of moment of inertia 0.05k-m2 is immersed in a viscous
fluid is shown in fig. during vibrations of pendulum, the observed amplitudes on the same
side of the neutral axis for successive cycles are found to decay 50% of the initial value.
Determine 1) logarithmic decrement.
2) Damping torque/unit velocity.
3) The periodic time of vibration.
4) The frequency when the disc is removed from fluid.
Assume G= 4.5x1010N/m2 for material of shaft, d= 0.1m and L= 0.5m.
21) Derive equation of motion for the system shown in fig. if m= 1.5 kg K= 4900N/m a= 60mm
& b= 140mm. determine the value of C for which the system is critically damped. Also find
the natural frequency.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 44 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
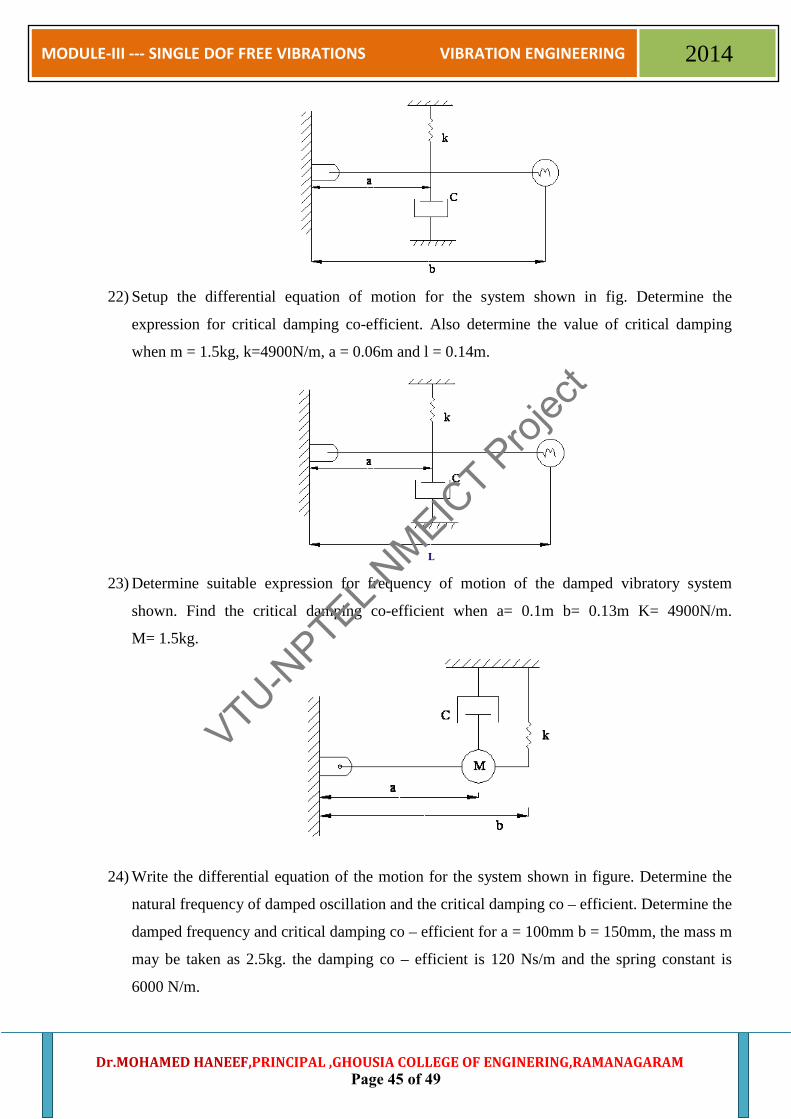
22) Setup the differential equation of motion for the system shown in fig. Determine the
expression for critical damping co-efficient. Also determine the value of critical damping
when m = 1.5kg, k=4900N/m, a = 0.06m and l = 0.14m.
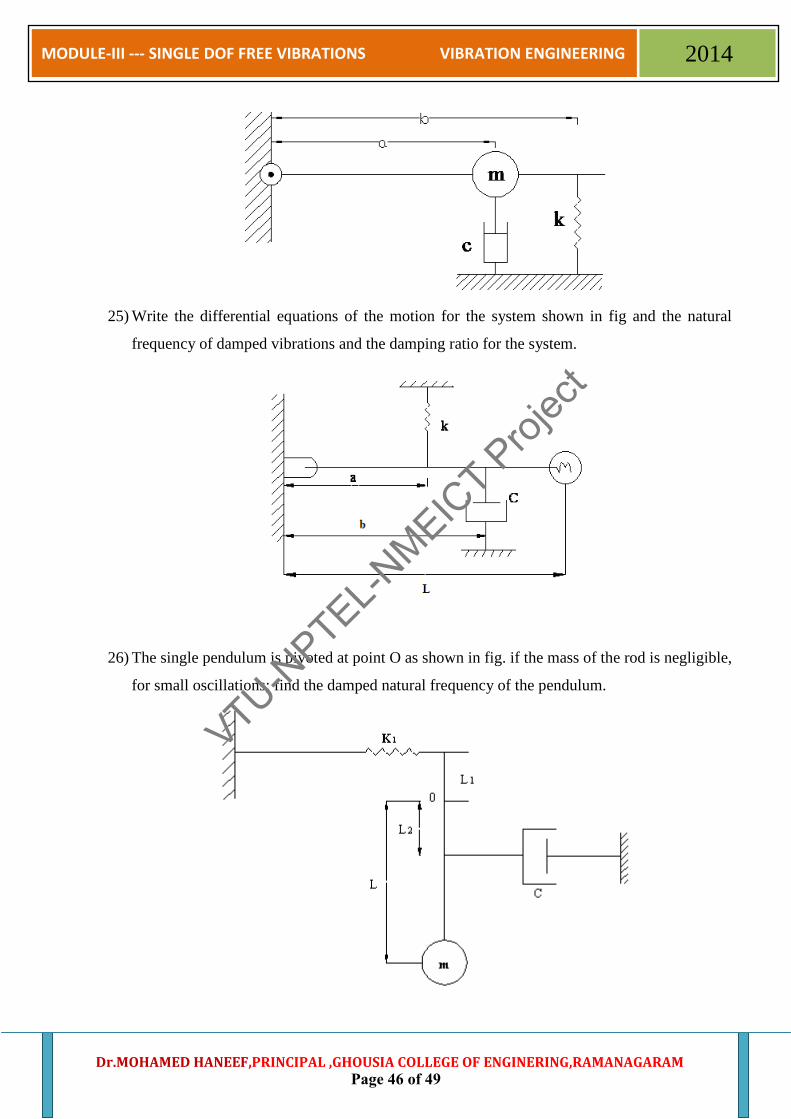
23) Determine suitable expression for frequency of motion of the damped vibratory system
shown. Find the critical damping co-efficient when a= 0.1m b= 0.13m K= 4900N/m.
M= 1.5kg.
24) Write the differential equation of the motion for the system shown in figure. Determine the
natural frequency of damped oscillation and the critical damping co – efficient. Determine the
damped frequency and critical damping co – efficient for a = 100mm b = 150mm, the mass m
may be taken as 2.5kg. the damping co – efficient is 120 Ns/m and the spring constant is
6000 N/m.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 45 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
25) Write the differential equations of the motion for the system shown in fig and the natural
frequency of damped vibrations and the damping ratio for the system.
26) The single pendulum is pivoted at point O as shown in fig. if the mass of the rod is negligible,
for small oscillations; find the damped natural frequency of the pendulum.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 46 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
Test Your Skills Multiple choice questions:
1. Consider a mass-spring system described by the equation 2u″ + 3u′ + k u = 0. Give the value(s) of k for which the system is under- damped.
a. If k > 9 / 8 b. If k > 9 c. If k= 9 d. None
2. The equation of critical damping is
a. . 2𝑚𝜔𝑑 b. 2𝑚𝜔𝑛 c. 2𝐾𝜔𝑛 d. 2𝑛𝜔𝑛
3. For oscillatory motion damping factor zeta is equals to
a. <1 b. > 1 c. equal to 1 d. none
4. Consider a mass-spring system described by the equation 2u″ + 3u′ + k u = 0. Give the value(s) of k for which the system is critically damped.
a. if k < 8/9 b. if k = 8/9 c. if k = 9 / 8 d. if k > 8/9 5. Consider a mass-spring system described by the equation 4u″ + γ u′ + 36u = 0.
Give the value(s) of γ for which the system is over damped.
a. If γ =42 b. If γ > 42 c. If γ ≤ 24 d. If γ< 24
6. Logarithmic decrement is defined as a. Ratio of any two non successive amplitudes b. Ratio of any two successive amplitudes c. Ratio of any two non successive amplitudes d. Ratio of any non successive e. None
7. Consider a mass-spring system described by the equation 4u″ + γ u′ + 36u = 0. Give
the value(s) of γ for which the system is critically damped.
a. If γ ≤24 b. If γ > 42 c. If γ =24 d. If γ> 42
8. One of the equations below describes a mass-spring system undergoing resonance. Identify the equation. (i) u″ + 9u = 2cos 9t (ii) u″ + 4u′ + 4u = 3sin 2t (iii) 4u″ + 16u = 7cos 2t
a. (ii) b. (iii) c. (i) d. All of the above
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 47 of 49

MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
9. The equation 𝑓𝑑 = 𝜔𝑑2𝜋
indicates for
a. Corcular frequency
b. Natural frequency
c. Damped frequency
d. none
10. When the damping term�𝑐 2𝑚� �2
< �𝑘 𝑚� �, the exponents are imaginary, this case is
known as
a. Over damped.
b. Under damped.
c. Critically damped.
d. All of the above
Answers: 1)a 2) b 3) b 4) c 5) d 6)b 7)c 8) b 9) c 10) b Fill up the blanks given below
1. When the damping term____________, the exponents are imaginary, this case is
known as under damped.
2. The equation ________ indicates for Damped frequency
3. The equation 𝑓𝑛 = 𝜔𝑛2𝜋
indicates for ________
4. The equation _______ indicates for natural frequency
5. Logarithmic decrement is defined as Ratio of _______________ 6. Damping factor is indicated by the symbol __________ 7. Equation for critical damped motion is given by__________ 8. ________ is the equation for spring mass system. 9. ____________ type of damping leads to a resisting force proportional to the velocity.
Answers:
1) �𝑐 2𝑚� �2
< �𝑘 𝑚� � 2) 𝑓𝑑 = 𝜔𝑑2𝜋
3) Natural Frequency 4) 𝑓𝑛 = 𝜔𝑛2𝜋
5) any two successive amplitudes. 6) 𝜁 7) �𝑐 2𝑚� �2
> �𝑘 𝑚� �.
8) 𝑚�̈� + 𝐾𝑥 = 0 9) Viscous damping
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 48 of 49
MODULE-III --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING 2014
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 49 of 49





























