-
7/31/2019 Vogel 2003
1/7
Accident Analysis and Prevention 35 (2003) 427433
A comparison of headway and time to collision as safety
indicatorsKatja Vogel
Swedish National Road and Transport Research Institute, S-581 95
Linkping, Sweden
Received 13 September 2001; received in revised form 21 January
2002; accepted 13 February 2002
Abstract
The two safety indicators headway and time to collision (TTC)
are discussed and compared with respect to their usefulness
indetermining the safety of different traffic situations, like
different locations in a junction. Over a 6-day-period traffic flow
measures weretaken in a four-way junction with stop signs on the
minor road. It was found that for vehicles in a car following
situation headway and TTC
are independent of each other. The percentage of small headways
is relatively constant across different locations in the junction,
while thepercentage of small TTC values varies between different
locations. It is recommended to use headway for enforcement
purposes, becausesmall headways generate potentially dangerous
situations. TTC, on the other hand, should be used when a certain
traffic environment is tobe evaluated in terms of safety, because
it indicates the actual occurrences of dangerous situations. 2002
Elsevier Science Ltd. All rights reserved.
Keywords: Safety assessment; Safety indicator; Time to
collision; Headway
1. Introduction
Time headway (H) is one of the indicators that is usedto
estimate the criticality of a certain traffic situation. It has
been defined as the elapsed time between the front of thelead
vehicle passing a point on the roadway and the front ofthe
following vehicle passing the same point (Evans, 1991,p. 313). In
some countries, this indicator is also used bythe authorities to
impose fines for close following. Anotherwidely used safety
indicator is time to collision (TTC), aconcept introduced by
Hayward (1972). It indicates the timespan left before two vehicles
collide, if nobody takes evasiveaction. In this study, these two
indicators will be compared,both theoretically and in relation to
empirical data.
1.1. Time headway
Time headway is measured by taking the time that passesbetween
two vehicles reaching the same location (seeEq. (1)).
H = ti ti1 (1)
with ti denoting the time at which the vehicle i passes acertain
location and ti1 the time at which the vehicle aheadof vehicle i
passes the same location.
Tel.: +46-13-20-43-06; fax: +46-13-14-14-36.E-mail address:
[email protected] (K. Vogel).
Different countries have slightly different rules with re-gard
to the legal or recommended safety distance. In the US,e.g. several
driver training programs (Michael et al., 2000)state that it is
impossible to follow a vehicle safely with
a headway of less than 2 s. In Germany, the recommendedminimum
distance is half the speedometer, which means,a car traveling at 80
km/h should keep a distance of at least40 m. This rule translates
to a recommended time headwayof 1.8 s. Fines are imposed when the
time headway is smallerthan 0.9 s. In Sweden the National Road
Administration rec-ommends a time headway of 3 s in rural areas,
and the po-lice use a time headway of 1 s as orientation for
imposingfines.
Researchers investigated whether any connection betweenpreferred
time headway, accident involvement, and drivercharacteristics
existed, but the results are not consistent.Evans and Wasielewski
(1982), e.g. claimed that drivers whokeep longer time headways tend
to have a history of feweraccidents and violations. On the other
hand, the same authorsstated 1 year later (Evans and Wasielewski,
1983), that noreliable relation between preferred time headway and
acci-dent involvement could be detected. Van Winsum and Heino(1996)
investigated in a simulator study whether a closerfollowing
distance was connected to more expertise in ac-curately estimating
TTC, but the relationship they foundwas not significant. Michael et
al. (2000) found that a sub-stantial percentage of drivers in
several urban locations didnot observe the 2 s rule, but compliance
increased moder-ately when hand-held signs urged drivers to heed
the rule.
0001-4575/02/$ see front matter 2002 Elsevier Science Ltd. All
rights reserved.PII: S 0001-457 5(02)000 22-2
-
7/31/2019 Vogel 2003
2/7
428 K. Vogel/ Accident Analysis and Prevention 35 (2003)
427433
However, no direct relation to the occurrence of traffic
con-flicts was provided.
1.2. Time to collision
TTC is computed according to Eq. (2).
TTCi =Xi1(t) Xi(t) li
Xi(t) Xi1(t) Xi(t) > Xi1(t) (2)
with Xi denoting the speed of vehicle i, Xi the position
ofvehicle i, li the length of vehicle i and i1 the vehicle aheadof
vehicle i.
The TTC is the time that is left until a collision occurs ifboth
vehicles continue on the same course and at the samespeed.
Therefore it is the time that is needed to cover thedistance
between the lead and the following vehicle withthe relative speed
between the lead and the following ve-hicle. Hayward (1972) first
introduced this concept, and it
is discussed extensively in Hydn (1987), for example.
Forcalculation of TTC to be possible, the vehicles in ques-tion
have to be on collision course, but not necessarily ina
car-following situation. TTC in car-following situationsis only
defined when the speed of the following vehicle ishigher than the
speed of the lead vehicle. In research TTChas often been used as a
safety indicator for certain ma-neuvers by determining the minimum
TTC measured dur-ing the maneuver (e.g. van Winsum and Heino, 1996;
Hirstand Graham, 1997; Janssen and Nilsson, 1991). Accordingto
Svensson (1998), TTC is an indicator for a traffic con-flict and
is, thus, inversely related to accident risk (smallerTTC values
indicate higher accident risks and vice versa).In a recent article,
Minderhoud and Bovy (2001) suggest amethod, which allows using TTC
to compare the safety ofdifferent drivers, road environments, or
situations in gen-eral. The basic idea is to sample TTC values over
time, andto examine how often a certain driver undershoots a
givenlower safety limit, or how often this limit is breached on
aparticular road stretch or under particular conditions. In
theliterature different opinions can be found as to which
valueshould be used as safety limitsuggestions range from 1.5sin
urban areas (Svensson, 1998) to 5 s (Maretzke and Jacob,1992).
Minderhouds and Bovys (2001) method will be ap-plied on empirical
data in this study, and different threshold
values will be compared.
1.3. Relation and comparison
A comparison of the two equations shows that more vari-ables
have to be known to determine TTC than to determine
H. The relationship between these two measures is presentedin
Eq. (3).
TTC =Xi
Xi Xi1H, where H = H
li1
Xi= gap
(3)
with Xi1 denoting the speed of the lead vehicle, Xi thespeed of
the following vehicle and li1 the length of the leadvehicle.
To obtain TTC, the speed of both the involved vehicleshas to be
known in addition to the time gap. An interestingdifference between
the two measures exists with respect to
traffic safety. It could be formulated such that time headwayis
a step further away from a crash than TTC. This claimis based on
the reasoning described later.
Let us consider a vehicle in the following mode. Sucha vehicle
can have a relatively small headway, but a largeor even undefined
TTC value. This situation occurs, whenXi1 is equal to or larger
than Xi (cf. Eq. (3)). The situationbecomes critical only when
something in the constellationchanges, like when the lead vehicle
brakes such that Xi1becomes smaller than Xi. Thus, under stable
circumstances,a small time headway can be maintained over extended
pe-riods of time without resulting in an immediately danger-ous
situation. If, on the other hand, the TTC value of the
following vehicle is small, something has to change in
theconstellation if a crash is to be avoided. In a
car-followingsituation, the average relative speed between
following andlead vehicle cannot be larger than 0 if a collision is
to beavoided in the long run.
To summarize, vehicles with small time headways can(and
frequently do) have large or undefined TTC values,while small TTC
values (in car following) are impossiblefor vehicles with long time
headways. In a car-followingsituation, TTC can, in fact, never be
smaller than H, becausethe term Xi/(Xi Xi1) (cf. Eq. (3)) can never
be smallerthan 1. This is due to the fact that Xi1 is never
negative,
which would mean that the lead vehicle was reversing. Inthe
special case of a stopped lead vehicle (Xi1 = 0), theactual time
gap (H) equals TTC.
As mentioned earlier, in a car-following situation TTCcan never
be smaller than the time gap between the lead andthe following
vehicle (H). Thus, if the two values are to becompared, it seems
reasonable to exclude those cases thatare not safety critical with
respect to any of the two measures(Table 1). In order to determine
the threshold between safetycritical small and safe long headways,
the existing liter-ature on the concept of free and following
vehicles wasconsulted. A free vehicle is by definition not in
interactionwith any vehicle ahead of it. For this reason, the
analysesin the present study were limited to following vehicles.
Thedefinition for a free vehicle that was adopted here is basedon
an empirical analysis by Vogel (2002), which shows that
Table 1Relationship between TTC, headway and safety
Headway
Small Large
TTCSmall Danger imminent ImpossibleLarge Potential danger
Safe
-
7/31/2019 Vogel 2003
3/7
K. Vogel / Accident Analysis and Prevention 35 (2003) 427433
429
vehicles with a time headway of more than 6 s choose
theirtraveling speed independent of the vehicle ahead. The choiceof
this threshold value is supported by the fact that no
authorconsiders a TTC that is larger than 6s to be dangerous.
Thismeans that even a stopped lead vehicle will not force
thefollower to perform dangerous avoidance maneuvers if the
headway is larger than 6s (and the following driver can seethe
vehicle ahead). Only for speeds higher than 130 km/h alarger time
headway is needed to stop a vehicle safely be-hind a stopped
vehicle.
An additional reason for limiting the analysis to follow-ing
vehicles only is the possibility to compare different sit-uations
with each other. It allows, e.g. comparing the safetylevel for
situations with different traffic densities, eitheracross
locations, or in the same location at different times.If it were of
interest whether the safety level is influencedby time of day
(daytime versus night-time), a simple com-parison of the percentage
of small TTCs across all vehi-cles would mostly reflect the lower
traffic volume during
night-time. This might lead to the assumption that safety
in-creases during the night. If, on the other hand, only
thosevehicles are considered that actually are in a
car-followingsituation, a relative increase of small TTC values
might befound during the night, which could for instance be
ex-plained with driver fatigue and extended reaction times.
The last reason for restricting the analysis to
followingvehicles is of methodological nature. A consequence of
themeasurement technique used in this study is that TTC val-ues
become less reliable the longer the time headway forthe vehicle in
question. This is explained in more detail inSection 3. By
excluding vehicles with a long headway from
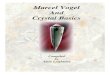
Fig. 1. Schematic overview of the junction with indication of
the location of the measurement sites.
the analysis, those unreliable TTC values are excluded
aswell.
2. Method
The location of the study was a four-way junction in amid-sized
town in Sweden. The junction is one of the mostaccident-prone
locations in town. Stop signs were placedon the subordinate road
and right-of-way signs were placedon the main road. The posted
speed limit was 50km/h onall arms of the junction. All arms had one
lane in eachdirection, except for one arm on the main road, which
had aseparate lane for left-turning vehicles (Fig. 1). The
junctionwas located in the outskirts of the town, the two
streetsforming it were major roads leading to residential areas.
Thecontinuation of the main road after measurement site
Main1(indicated in Fig. 1) led out of town, the continuation
aftermeasurement site Main5 led to the city center. Lampposts
were installed at the junction on all four arms.For 6 days in
spring 2000, traffic flow point measure-
ments were taken 24 h a day at seven locations around
thejunction. The weather during the measurement week waseither
sunny or cloudy, but there was no precipitation. Themeasurement
devices (described in detail in Anund, 1992)record the speed of
each passing vehicle, its direction, thetime interval between two
passing vehicles, and the axle dis-tance of each vehicle, from
which the vehicle type can bededuced to a certain extent (Srensen,
1996).
The locations of the measurement devices are indicatedin Fig. 1.
The measuring sites Main1 and Main4, as well as
-
7/31/2019 Vogel 2003
4/7
430 K. Vogel/ Accident Analysis and Prevention 35 (2003)
427433
Sub1 and Sub2 were located at 115m distance from the cen-ter of
the junction, the sites Main2 and Main3 were locatedat 17.5m
distance from the center of the junction. Main5was located on the
main road, approximately 600 m awayfrom Main4. There was no
junction in the vicinity, exceptfor one small and not very
frequently used by-road lead-
ing to a block of houses, at a distance of about 20m fromSub2.
On site Main3 (direction out of town), left-turningvehicles could
be registered separately due to the dividedlane.
Measurement sites were defined to be corresponding,when they
were installed on equivalent locations with re-spect to the
junction. In this sense, the locations Sub1 (direc-tion towards
junction) and Sub2 (direction towards junction)are corresponding,
as well as the locations Main2 (directionaway from junction) and
Main3 (direction away from junc-tion).
3. Results
Between 20,000 and 40,000 vehicles were registered ateach
location, depending on traffic volume. For each vehi-cle the
driving speed, driving direction and the passing timewere recorded.
Each driving direction was analyzed sepa-rately for each site. Only
vehicles with time headways of atmost 6 s were considered in the
analysis. Time headway andTTC were calculated as follows.
Time headway was calculated precisely as in Eq. (1). Ithas to be
noted that time headway usually is defined as theelapsed time
between the front of the lead vehicles and the
front of the following vehicles reaching the same location.In
the present study, the vehicles were recorded as soon asthe front
axle passed the measurement site. Thus, the elapsedtime between the
two front axles reaching the same locationis taken as approximation
of time headway.
For the calculation of TTC another approximation hadto be made.
According to Eq. (2), the numerator should beequal to the distance
headway minus the length of the leadvehicle, which is the distance
gap between the two vehicles.As distance headway was not directly
available from the datain this study, it was derived from time
headway and travelingspeed of the following vehicle, based on the
assumptionthat the vehicles traveled at a constant speed during
themeasurement period. Vehicle length was approximated byadding
1.80 m to the axle distance of the lead vehicle. 1.80 mis equal to
the average difference between vehicle lengthand axle distance for
passenger cars. It was felt that thisapproximation was acceptable,
because 95% of all recordedvehicles were passenger cars. However,
no vehicle typeswere excluded from the analysis.
The denominator should be the relative speed between thetwo
vehicles at measurement time ti. It was approximatedby the
difference between the speed of the following vehicleat measurement
time ti and the speed of the lead vehicleat measurement time ti1,
with ti being the time when the
following vehicle was recorded at the measurement site, andti1
being the time when the lead vehicle was recorded atthe measurement
site.
3.1. Traffic density
Neither the subordinate nor the main road operated at ca-pacity
level any time. For both roads the number of vehi-cles per hour was
very similar across weekdays, the patternlooked different for
Saturday and Sunday, though, as therewere no rush hour peaks. The
increase in traffic volume dur-ing the morning and the afternoon
rush hours on weekdayswas more pronounced on the main road.
The percentage of following vehicles lay on averageslightly
above 30% on the main road and somewhat below30% on the subordinate
roads. The percentage of followingvehicles increased with
increasing traffic volume, but at anytime of day there were at
least 50% free vehicles on bothroads.
3.2. Relationship between time to collision and headway
For each site and each direction correlations between
timeheadway and TTC were calculated for cases with valid TTCvalues
(speed of following vehicle larger than speed of leadvehicle). At
each site, the correlation was substantial if allvehicles were
considered (average correlation r = 0.423;S.D. = 0.169), but close
to 0 when only following vehicleswere considered (average
correlation r = 0.077; S.D. =0.047). If only following vehicles are
considered, TTC and
H can be regarded as practically independent of each other
and can be investigated separately.
3.3. Headway
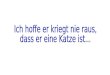
For each measurement site and each direction, the per-centage of
measured time headways that were below 1, re-spectively 2 s, given
all following vehicles, was calculated.The results are presented in
Fig. 2. The length of the blackfield shows the percentage of time
headways below 1 s, andthe length of the gray field shows the
percentage of timeheadways between 1 and 2s. The sum of the lengths
of bothshows the percentage of time headways below 2 s (percent-age
scale in lower left-hand corner), always given all fol-lowing
vehicles at the site in question.
As can be seen in Fig. 2, the percentage of vehicles thatdrive
with a time headway below 2s is relatively evenly dis-tributed on
the main road (30.3% on average, S.D. = 5.99).The percentage of
following vehicles traveling with a timeheadway below 1 s is on
average 1.5% with a S.D. of 0.95.There are no big differences
between the direction towardsthe junction and the direction away
from the junction. Onthe subordinate road, on the other hand, more
vehicles drivewith a time headway below 2 s when they are on their
waytowards the junction. In general, the percentage of
smallheadways is relatively similar on the corresponding sites.
A
-
7/31/2019 Vogel 2003
5/7
K. Vogel / Accident Analysis and Prevention 35 (2003) 427433
431
Fig. 2. Percentage of vehicles with time headways smaller than 2
and 1 s, respectively, given all following vehicles, for each
measurement site and eachdirection. The percentage scale is
indicated in the lower left-hand corner.
comparison of the sites close to the junction (both directionson
Main2 and Main3) with the sites further away from thejunction (both
directions on all other sites) does not showany noteworthy
differences with respect to percentage ofsmall time headway
values.
Fig. 3. Percentage of vehicles with TTC values smaller than 5,
4, 3, 2 and 1 s, given all following vehicles, for each measurement
site and each direction.The percentage scale is indicated in the
lower left-hand corner.
3.4. Time to collision
TTC values are presented in a similar fashion in Fig. 3.The
length of the black rectangle indicates the percentageof vehicles
that had a TTC value of less than 1s at this
-
7/31/2019 Vogel 2003
6/7
432 K. Vogel/ Accident Analysis and Prevention 35 (2003)
427433
measurement site, based on all following vehicles. Thelength of
the dark gray field indicates the percentage ofvehicles with TTC
values between 1 and 2 s, and so on.
Large differences with respect to the percentage of smallTTC
values can be found between the different measurementsites.
Generally, the sites closer to the junction have a higher
percentage of small TTC values, especially values below 1 soccur
almost only close to the junction.Visual inspection shows that most
corresponding mea-
surement sites have relatively similar percentages of smallTTC
values. The corresponding measurement sites Main3(towards the
junction, split into two lanes) and Main2 (to-wards the junction)
are an exception. Main2 has a muchlarger percentage of small TTC
values than Main3. More-over, the percentage of small TTC values on
Main2 is con-siderably larger than at any other site.
3.5. Comment on the use of inferential statistics
Due to the following reasons, no inferential tests wereperformed
to examine whether any of the observed differ-ences were
statistically significant or not: (a) the number ofmeasurement
sites was small (15), (b) the percentage valuesfor the different
time boundaries (
-
7/31/2019 Vogel 2003
7/7
K. Vogel / Accident Analysis and Prevention 35 (2003) 427433
433
traffic. A left-turning lane releases both the pressure on
theleft-turning vehicles that arises when a queue develops be-hind
them, and the potential anger of those who have to waitbehind a
blocked left-turner. If the number of left-turnersis approximately
equally high at site Main2 as on Main3,adding a left-turning lane
could lead to an increase in traf-
fic safety. It seems less likely that driving direction per
sehas an effect (going into town vs. leaving town), becauseno such
effect can be observed on the other correspondingsites.
Additionally, the junction was located well away fromboth the city
center and the city limits.
5. Conclusion
It was found that headway and TTC are independent ofeach other
for following vehicles. Due to the fact that TTCvalues cannot be
smaller than headway values, a short head-way can be interpreted as
potential danger, because onlyvehicles that travel with short
headways have the possibil-ity to produce small TTC values. A small
TTC value, onthe other hand, represents actual danger, because an
acci-dent can only be avoided by changing the situation
actively.The two values are suitable for different purposes,
becausethey provide different information. It is recommended
thatauthorities use headway as criterion for tailgating, becauseit
is easy to measure, it is easily understandable and inter-pretable,
and most important of all, it is directed againstpotential danger,
which effectively prevents dangerous TTCvalues from occurring at
all.
TTC values, on the other hand, should be used if the ac-
tual safety of a situation has to be evaluated. A particularroad
design or driver can be evaluated with respect to safetyby
examining the actual percentage of dangerously smallTTC values
within a given time frame. Similarly, it is pos-sible to evaluate
the safety of in-car systems like intelligenttransport systems
(ITSs) by comparing the same driver withand without the system.
Traffic environments can be com-pared with respect to safety, and
the same environment canbe analyzed at different times of day.
Possible re-design ofa road stretch or recommendations for ITS
devices can bebased on empirical grounds. The method could prove to
bevery useful within the field of traffic simulation, as long asthe
traffic model is based on accurate distributions of speedand
headway.
Acknowledgements
I would like to thank VINNOVA, Sweden and the SwedishNational
Road Administration for providing the financialsupport that made
this study possible. I also thank AlbertKircher for helpful
comments on the manuscript.
References
Anund, A., 1992. Beteendeeffekter av olika fretrdesregleringar
(notatT 133). Linkping: VTI.
Evans, L., 1991. Traffic Safety and the Driver. Van Nostrand
Reinhold,New York.
Evans, L., Wasielewski, P., 1982. Do accident-involved drivers
exhibitriskier everyday driving behavior? Acc. Anal. Prev. 14,
5764.
Evans, L., Wasielewski, P., 1983. Risky driving related to
driver andvehicle characteristics. Acc. Anal. Prev. 15, 121136.
Hayward, J.C., 1972. Near miss determination through use of a
scale ofdanger (traffic records 384). Highway Research Board,
Washington,DC.
Hirst, S., Graham, R., 1997. The format and presentation of
collisionwarnings. In: Noy, I.Y. (Ed.), Ergonomics and Safety of
IntelligentDriver Interfaces. Lawrence Erlbaum, Mahwah, NJ.
Hydn, C., 1987. The Development of a Method for Traffic
SafetyEvaluation: The Swedish Traffic Conflicts Technique,
DoctoralDissertation. Lund University, Lund, Sweden.
Janssen, W.H., Nilsson, L., 1991. An experimental evaluation of
in-vehiclecollision avoidance systems. In: Proceedings of the Paper
Presentationat the 24th ISATA International Symposium on Automotive
Technologyand Automation.
Maretzke, J., Jacob, U., 1992. Distance warning and control as a
meansof increasing road safety and ease of operation. In:
Proceedings ofthe Paper Presentation at the FISITA92: Safety, the
Vehicle and theRoad. XXIV FISITA Congress, London.
Michael, P.G., Leeming, F.C., Dwyer, W.O., 2000. Headway on
urbanstreets: observational data and an intervention to decrease
tailgating.Transport. Res. Part F 3 (2), 5564.
Minderhoud, M.M., Bovy, P.H.L., 2001. Extended
time-to-collisionmeasures for road traffic safety assessment. Acc.
Anal. Prev. 33, 8997.
Svensson, ., 1998. A method for analysing the traffic process in
a safetyperspective, Doctoral Dissertation. University of Lund,
Lund, Sweden.
Srensen, G., 1996. System fr bestmning av fordonskoder
(meddelande762). Linkping: VTI.
van Winsum, W., Heino, A., 1996. Choice of time-headway
incar-following and the role of time-to-collision information in
braking.Ergonomics 39 (4), 579592.
Vogel, K., 2001. Day- and night-time differences in speed in an
urbanintersection. In: Proceedings of the Paper Presentation at the
Vision inVehicles 9, Brisbane, Australia.
Vogel, K., 2002. What characterizes a free vehicle in an urban
area?Transport. Res. Part F 5 (1), 1529.