-
Linear Algebra by Prof. R. Vittal Rao
Lecture 1: August 05, 2010
1.1 Linear Systems
Historically, the subject of linear algebra has its origins in
thestudy of linear systems of equations. It is therefore natural
that webegin our discussions with a look at linear systems.
Example 1.1 Consider the system of equations
x + 3y = 6x y = 2
}(1.1)
It is easy to see that x = 3, y = 1 is a solution of this
system, andthat this is the only solution. We can view this
geometrically asfollows:
The first equation represents a line L1 whose X and Y
interceptsare 6 and 2 respectively. The second equation represents
the lineL2 whose X and Y intercepts are 2 and 2 respectively. They
meetat the point whose co-ordinates are x = 3 and y = 1.
0 1 2 3 4 5 6 7
-2-10123
(3, 1)
Thus, in the example, the solution to the system is given by
the
co-ordinates of the point of intersection of the lines
represented bythe two equations. Viewed from this geometric point
of view, wesee that we can encounter the following situations:
1. The two lines intersect at a point, in which case we get
exactlyone solution given by the coordinates of the the point of
inter-section,
2. The two lines coincide with each other, in which case we get
aninfinite number of solutions, given by the coordinates of
everypoint on this line, and
3. The two lines are distinct and parallel to each other, in
which casethere is no solution since the parallel lines do not
intersect atany point.
The example we considered earlier corresponds to the case 1.
Example 1.2 Consider the system
x + 3y = 62x + 6y = 12
}(1.2)
This corresponds to case 2.
1
-
1.2 The Basic Questions
Example 1.3 Consider the system
x + 3y = 62x + 6y = 10
}(1.3)
This corresponds to case 3.
In general, we would like to look at m equations in n
unknowns.We can write such a linear system as
a11x1+ a12x2 + + a1nxn = b1,a21x1+ a22x2 + + a2nxn = b2,...
......
...am1x1+ am2x2 + + amnxn = bm.
In matrix notation, the same can be written as
Ax = b (1.4)
where A = (ai j)1im,1 jn is a known matrix, and for any givenb =
(bi)1im we have to find x = (x j)1 jn.
We have to make this a little more precise, as we have to
mentionwhere the entries ai j of the matrix A, the entries bi of b
are fromand where we are seeking the entries xi of x. For the
moment, letus say all are real or complex. We shall denote by F
either R or C.Thus, the problem can be precisely stated as
Problem 1.1 Given A Fmn, for b Fm given, to find x Fn
suchthat
Ax = b
is the problem of linear systems.
1.2 The Basic Questions
We have seen systems (1.2) and (1.3) which can be written
inmatrix notation as
Ax =(
612
)and Ax =
(6
10
)where A =
(1 32 6
). Even though the matrix of the coefficients
is the same, we found out that the system (1.2) has
solution(s),whereas the system (1.3) has no solution. Thus, we see
that for agiven m n matrix A, the system Ax = b may have solution
forsome b Rm and may not have solution for some other b Rm.Thus,
the first question we have to ask is the following:
Question 1.1 Given A Rmn, what criterion b Fm should satisfyin
order that the system Ax = b can have a solution?
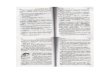
We shall denote such a criterion by [C] and we call it
consistencycondition(s). When b satisfies [C] we say the system is
consistent.This leads to a series of questions as given in Figure
1.1.
1.2.1 Least Square Solution
By b not satisfying [C], we mean that Ax = b has no solution.
Thismeans that whatever x we choose in Rn, Ax will not be equal to
b.This means
b Ax , 0 for every x Rn.We define
Eb(x) = b Ax
2
-
1.2 The Basic Questions
Does b satisfy [C]?
YES
There exists solutionfor problem 1.1
How many?
Exactly One
Under whatconditions
Find theunique solution
Infinitely many
Under whatconditions
Characterizeall solutions
Find a criterion andpick a unique rep-resentative solution
Find the unique rep-resentative solution
NO (No solution exists)
What can be done?
Can find leastsquare solution
(see section 1.2.1)
How many?
Exactly one
Under whatconditions
Find the uniqueleast square solution
Infinitely many
Under whatconditions
Characterize all leastsquare solutions
Find a criterionto pick a unique
representative leastsquare solution
Find the uniquerepresentative least
square solution
Figure 1.1: Series of questions from the consistency
condition(s) [C]
3
-
1.3 Easy Systems
as the errorwe get by taking x as the solution forAx = b. Now,
Eb(x)is an m 1 matrix. We quantify this error by the sum of squares
ofits entries by defining
eb(x) =mi=1
(bi (Ax)i)2 .
What we can show is that we can find xl Rn such that this
erroris minimized, that is,
eb(xl) eb(x) x Rn.Any such xl is called a least square
solution.
1.2.2 The Pseudo Inverse
We observe that in the string of questions we have raised, in
eachcase, ultimately, we want to find a unique vector as our
suitablesolution, as the case may be. This can be viewed as
follows:
Consider a system for which we input an x Rn and get anoutput Ax
Rm.
x Rn System Matrix,A Rmn Ax Rm
I/P O/P
When we say we want to solve Ax = b, what we are seekingis a
desired output b and we want to find which input can thisoutput b.
The system Ax = b is consistent means that there is aninput x which
will produce exactly the output b. The system isinconsistent means
that there is no input which can produce thedesired output b, but
we can find input xl which will produce anoutput Axl will error
eb(xl) smaller than or equal to the error forany other input.
This means, we have to start from the known b and constructxl.
So, we have to construct a new system, for which inputs arefrom Rm
and outputs are in Rn. Let the matrix of this system be A(should be
n m).
b Rm A Ax RnI/P O/P
We must construct A in such a way that Ab is the solution weare
looking for in each of the cases. Such a matrix A is called
thepseudo inverse of A.
Remark 1.1 We shall see that
1. When A is n n and A1 exists then A = A1, and2. WhenA is nn
andA1 does not exist orA ismn, the pseudo
inverse A still can be constructed.
Thus, the notion of pseudo inverse is more general than that
ofan inverse of a matrix.
1.3 Easy Systems
Let us now look at those systems which are relatively easy to
beanalyzed. A general system Ax = b is such that the unknown areall
coupled in all the equations. Hence the system becomes easierwhen
there is less coupling. The system in which the unknownsare not
coupled at all is the easiest to treat. So, let us considera system
of n equations in n unknowns in which the ith equationinvolves only
the ith unknown, xi. Such a system is of the form
aiixi = bi, 1 i n.
4
-
1.4 Exercises
The matrix of such a system is
D = (aii)1in =
a11 0 . . . 00 a22 . . . 0...
.... . .
...0 0 . . . ann
is a diagonal matrix. Thus, a system whose coefficient matrix
isa diagonal matrix is the easiest system. We shall soon see how
toanalyze such a system.
1.3.1 Reduction to a diagonal system
The question that arises naturally is whether we can reduce
ageneral system of n equations in n unknowns to a diagonal
system.Consider,
Ax = b where A is n n matrix.Let us introduce a change of
variables,
y = x,c = b
where is an invertible n n matrix. Then, we havex = 1y,b =
1c.
Let P = 1. Then, x = Py, b = Pc. The system Ax = b
hencebecomes
P1APy = c.
If we can choose P such that P1AP = D, a diagonal matrix,
thenthe system for y is a diagonal system
Dy = c
and hence an easy system. Thus, we can analyze y and hencex =
Py. So, the basic question that arises is the following:
Question 1.2 Let F = R or C. Given any nn matrix A over F, canwe
find an n n matrix over F which is invertible and such thatP1AP is
a diagonal matrix?
If such a P exists, we say that A is diagonalizable over F.
1.4 Exercises
1. Discuss, geometrically, the various alternatives that may
arisefor the solution of the system of the type
a1x + a2y + a3z = b11x + 2y + 3z = b2
}where a1, a2, a3, 1, 2, 3, b1, b2 R.
2. For the diagonal system (over R), Dx = b where
D =
2 0 0 00 1 0 00 0 4 00 0 0 6
, b =b1b2b3b4
,discuss the solution of the system.
3. Do the same as above for
D =
2 0 0 00 1 0 00 0 0 00 0 0 0
.
5
August 05, 2010Linear SystemsThe Basic QuestionsLeast Square
SolutionThe Pseudo Inverse
Easy SystemsReduction to a diagonal system
Exercises