Embed Size (px)
Citation preview

Effective Footstep Planning for Humanoids Using Homotopy-Class Guidance
Vinitha Ranganeni, Oren Salzman & Maxim Likhachev
Planning for Humanoids Homotopy Classes
O2
O3
O1
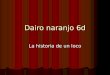
τ1
τ2
τ3
xs
xg
ζ2
ζ3
ζ1
ζ4
t1 t2 t3 t4xs
xg
τ1 and τ2 are in the same homotopy class but τ3 is not because of obstacle O1.
τ
The signature s of path τ is t1t2t4-1
{vrangane, osalzman}@andrew.cmu.edu, [email protected]
Extract Homotopy
Class 𝑠
2D (projected) workspace
2D (projected) workspace
2D (projected) workspace
User Paths
Footstep Planning Using
MHA* Framework
Full-D Planner (Guided by
Footstep Planner)
Full-D C-Space
6D C-Space
Project Configuration
6D 2D
Algorithmic Overview
Path Quality Future Work
Homotopic-Based Heuristic • Extend to more complex environments—stairs and ladders
• Automatically generatehomotopy classes
Compute Heuristic
on demand via HBSP
Low
High
Low
Results
High
Complex
queries
Simple
queries
Complex
queries
Simple
queries
S.1. One baseline heuristic
S.2. One baseline heuristic and
one homotopy-based heuristic
S.3. One baseline heuristic and three
homotopy-based heuristics
High
Low
High
Low
Baseline Heuristic