Embed Size (px)
Citation preview

1313131313QR of RTRI, Vol. 52, No. 1, Feb. 2011
PAPERPAPERPAPERPAPERPAPER
VVVVVertical Vertical Vertical Vertical Vertical Vibration Suppression System for Railway Vibration Suppression System for Railway Vibration Suppression System for Railway Vibration Suppression System for Railway Vibration Suppression System for Railway Vehicles Based on Primary Sus-ehicles Based on Primary Sus-ehicles Based on Primary Sus-ehicles Based on Primary Sus-ehicles Based on Primary Sus-pension Damping Control pension Damping Control pension Damping Control pension Damping Control pension Damping Control −−−−−System Development and VSystem Development and VSystem Development and VSystem Development and VSystem Development and Vehicle Running Tehicle Running Tehicle Running Tehicle Running Tehicle Running Test Resultsest Resultsest Resultsest Resultsest Results−−−−−
1. Introduction1. Introduction1. Introduction1. Introduction1. Introduction
Horizontal ride comfort on recently developedShinkansen vehicles in Japan has been markedly im-proved by virtue of vibration control systems, such assemi-active and active suspension [1, 2]. As a result, pas-sengers now tend to sense vertical vibration more thanhorizontal vibration. Therefore, vertical vibration sup-pression of car body is required to improve ride comfortmore. In the vertical direction, car body elastic vibrationneeds to be suppressed (particularly the first bendingmode vibration) [3], which has a natural frequency ofaround 8-12 Hz. This is because the natural frequency isclose to 4-8 Hz: a vertical vibration to which humans aresensitive. The first bending mode vibration frequentlybecomes a problem because Shinkansen vehicles in Ja-pan must be as light-weight as possible to achieve highrunning speed while being able to accommodate track andenvironmental constraints [4]. Therefore, various meth-ods for suppressing the first bending mode vibration haveso far been proposed.
The conventionally used methods of suppressing bend-ing vibration in car bodies include dissipating vibrationenergy by introducing some damping materials [5] or dy-namic dampers [6], and by utilizing car-body-bogie dy-namic interaction [7], and directly applying a dampingforce to the car body by attaching piezoelectric elements[8, 9]. Vibration control can also be achieved by attachingactuators or variable dampers to the secondary suspen-sion [10, 11]. Attaching active mass dampers to the carbody and actuators to the secondary suspension can beused as methods to simultaneously suppress bending and
rigid-body-mode vibrations in car bodies [12].Although some of these methods are being evaluated
in running tests, there are still relatively few reports onany significant suppression of the first bending mode vi-bration of the car body and on marked improvement ofthe ride comfort.
This paper puts forward an original method for sup-pressing car body vibration by a damping force control ofthe primary suspension in the vehicle. Specifically, thevertical vibration of the bogie frame, which is a majorsource of car body vibration, is suppressed by controllingthe primary suspension system in the vehicle, which, inturn, suppresses the vibration of the car body. The no-table feature of this method is that the car body and thesecondary suspension system are not modified. The fa-vorable effects of this method on vibration suppressionhave already been confirmed by numerical simulation andvibration excitation tests using a rolling stock test benchas shown in [13].
The aim of this paper is to demonstrate the vibrationsuppression effect by carrying out running tests usingShinkansen (bullet train) vehicles and to develop proto-types of the proposed system. This paper also aims to re-port on efforts made to modify the system for practicalapplication. The structure of this paper is outlined be-low:
First, the overall structure of the proposed systemand the variable primary vertical damper as developedfor running tests with Shinkansen vehicles are explained.Second, is a report on results from a high-speed runningtest with a Shinkansen vehicle on a commercial line andthe validity of the method is verified. Finally, the improved
YYYYYoshiki SUGAHARA, Droshiki SUGAHARA, Droshiki SUGAHARA, Droshiki SUGAHARA, Droshiki SUGAHARA, Dr. Eng.. Eng.. Eng.. Eng.. Eng.Senior Researcher,
Vehicle Noise and Vibration Laboratory, Vehicle Structure Technology Division
Nobuyuki WNobuyuki WNobuyuki WNobuyuki WNobuyuki WAAAAATTTTTANABEANABEANABEANABEANABESenior Researcher,
Running Gear Laboratory, Vehicle Structure Technology Division
TTTTTadao Tadao Tadao Tadao Tadao TAKIGAMI, DrAKIGAMI, DrAKIGAMI, DrAKIGAMI, DrAKIGAMI, Dr. Eng.. Eng.. Eng.. Eng.. Eng.Senior Researcher,
Reiko KOGANEI, DrReiko KOGANEI, DrReiko KOGANEI, DrReiko KOGANEI, DrReiko KOGANEI, Dr. Eng.. Eng.. Eng.. Eng.. Eng.Assistant Senior Researcher,
Suppression of vertical bending vibration is essential to improve ride comfort on rail-way vehicles. For this purpose, a primary suspension damping force control system isbeing developed. This paper describes the composition of the system and reports on theresults from vehicle running tests on some Shinkansen lines using actual Shinkansenvehicles fitted with the developed variable primary vertical dampers. The results of thesetests demonstrate that this system is effective in reducing vertical vibration accelerationin the first bending mode of the car body and improves ride comfort. In addition, a progressreport is also given on its ongoing development.
KeywordsKeywordsKeywordsKeywordsKeywords: railway vehicle, suspension, damping control, bending vibration, variabledamper
Vehicle Noise and Vibration Laboratory, Vehicle Structure Technology Division

1414141414 QR of RTRI, Vol. 52, No. 1, Feb. 2011
system being developed for practical use and its runningtest results are described.
2. System composition and control algorithm2. System composition and control algorithm2. System composition and control algorithm2. System composition and control algorithm2. System composition and control algorithm
2.1 Overall system composition2.1 Overall system composition2.1 Overall system composition2.1 Overall system composition2.1 Overall system composition
Figure 1 shows the overall structure of the proposedsystem. As the figure shows, the variable primary verti-cal dampers, which are controlled to suppress the bend-ing vibration of the car body, are mounted in parallel tothe primary suspension (axle spring). Each car is equippedwith eight dampers. The control system comprises thecontroller inside the car body, accelerometers that areattached to the car body and each bogie frame; the sen-sors on the car body however are not used when applyingthe sky-hook control law as described in Section 2.3. Thecontroller consists of anti-alias filters, a computer (a digi-tal signal processor), and valve drivers, which supply elec-trical current to damping control valves.
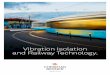
force during its extension (denoted as ‘Extension’ in thefigure) at a small command current (approximately 0.3A), which falls to a minimum during its compression (de-noted as ‘Compression’ in the figure).When the commandcurrent is increased to approximately 1.3 A, the oppositebehavior is observed. At an intermediate command cur-rent (approximately 0.9 A), no damping force is gener-ated during extension or compression. Thus, the direc-tion of the damping force generated by the variable pri-mary vertical damper can be controlled by the commandcurrent alone, eliminating the need to consider the pis-ton stroke velocity of the damper from the point of viewof the controller. It is therefore possible to control thedamper without measuring its displacement. In this casecommand currents of less than 0.3 A or more than 1.3 A
Fig. 1 Primary suspension damping control systemFig. 1 Primary suspension damping control systemFig. 1 Primary suspension damping control systemFig. 1 Primary suspension damping control systemFig. 1 Primary suspension damping control system
( )
Car body accelerometer (using only for LQG control)
Air spring Car body
ControllerBogie frame
Bogie frameaccelerometer Secondary
suspension
Variable primaryvertical damper(Variable axle damper)
Primary spring (axle spring)
Primarysuspension
Axle box
2.2 V2.2 V2.2 V2.2 V2.2 Variable primary vertical damperariable primary vertical damperariable primary vertical damperariable primary vertical damperariable primary vertical damper
Figure 2 shows the variable primary vertical damper(variable axle damper) which we developed. To ensurecompatibility for mounting, the dimensions and maximumdamping force of this damper are equivalent to those ofthe currently used passive primary vertical damper,namely, 370mm and 6−8 kN, respectively. The dampingcontrol system can therefore be mounted on the vehicleby simply exchanging them with the other primary verti-cal dampers without any modification to the vehicle it-self.
A reverse proportional solenoid control relief valve isused in the damping control system of the variable pri-mary vertical damper [14]. Figure 3(a) shows the com-mand current vs. damping force characteristics of the vari-able primary vertical damper in the extension and com-pression directions at a fixed piston speed. In general,the Karnopp approximation referred to in [15], an approxi-mation method for command values, is widely used insemi-active control. Depending on the direction of thepiston stroke velocity, the variable primary verticaldamper may generate force only in the direction oppositeto that required. In this case, it should be commanded tosuppress the damping force to the maximum extent pos-sible. A control valve with a built-in Karnopp approxima-tion law function is incorporated into the variable pri-mary vertical damper. This damper generates a damping
Fig. 2 VFig. 2 VFig. 2 VFig. 2 VFig. 2 Variable primary vertical damperariable primary vertical damperariable primary vertical damperariable primary vertical damperariable primary vertical damper
bottom top
Fail-safe valveDamping forcecontrol valve
Rubber bushing
Fig. 3 Characteristics of variable primary vertical damperFig. 3 Characteristics of variable primary vertical damperFig. 3 Characteristics of variable primary vertical damperFig. 3 Characteristics of variable primary vertical damperFig. 3 Characteristics of variable primary vertical damper
-6
-4
-2
0
2
4
6
0.3 0.5 0.7 0.9 1.1 1.3Electric current [A]
Dam
ping
for
ce [
kN]
0
1
2
3
4
5
6
0 0.05 0.1 0.15 0.2Piston speed [m/s]
Dam
ping
for
ce [
kN]
(a) Between command current and damping force
(b) Between piston speed and damping force of passive/variable primary vertical damper
Extension (0.03m/s)Extension (0.05m/s)Compression (0.03m/s)Compression (0.05m/s)
Power off
Max. damping (0.3A)Min. damping (0.9A)Passive damper

1515151515QR of RTRI, Vol. 52, No. 1, Feb. 2011
are not used.Figure 3(b) shows the piston speed vs. damping force
characteristics of the variable primary vertical damperat a fixed command current. The damping force varies inthe region between the lines denoting minimum (0.9 A)and maximum damping (0.3 A). The damping force of thevariable primary vertical damper has a range of approxi-mately 5 kN, excluding the region of very low piston speed,and almost covers the complete damping force range ofthe conventional passive primary vertical damper (de-noted as ‘Passive damper’ in the figure)
In high-speed running on commercial Shinkansenlines, the control system is required to have a fail-safefeature. To achieve this, a switching valve interlocked withthe system power was installed (the fail-safe valve in Fig.2) such that the damping force characteristic of the pri-mary vertical damper when the system power is turnedoff is as close as possible to that of the currently usedpassive primary vertical damper (denoted as 'Power off'in Fig. 3(b)). Even when an error occurs in the controlsystem, it is therefore possible to run a vehicle under al-most normal conditions by turning off the system power.
2.3 Control algorithm2.3 Control algorithm2.3 Control algorithm2.3 Control algorithm2.3 Control algorithm
Various control theories exist for controlling primaryvertical dampers. In this study, the bogie frame sky-hookcontrol and the linear-quadratic-Gaussian (LQG) controlused in Ref [10] were employed.
Figure 4(a) shows a block diagram of the controllerwhen the sky-hook control law is used. The vertical vi-bration accelerations of the bogie frames are separated
into bouncing and pitching modes, and each componentis integrated through a filter to obtain the vertical vibra-tion velocity for each vibration mode. The vibration ofthe bogie frame is reduced by making the damper gener-ate a force proportional to the velocity in the directionopposite the velocity. In this control method, the vibra-tion of the bogie frame is reduced without consideringthe vibration mode of the car body; therefore, in principle,it is not necessary to consider the changes in the vibra-tion characteristics of the car body (e.g., those causedwhen passengers ride in the vehicle) from the controllerpoint of view.
Figure 4(b) shows a block diagram of the controllerwhen the LQG control law is used. The LQG control lawis one among a series of “modern control theory” based onstochastic optimal control [16]. On the basis of the pre-determined numerical model (i.e., nominal model) of thevehicle, the state values of the vehicle model are estimatedfrom the measured vertical vibration accelerations of thebogie frame and the car body using a Kalman filter. Op-timal control is then performed using the estimated statevalues. This method enables vibration control in accor-dance with the vibration mode of the car body, making itpossible to selectively suppress the first bending modevibration of the car body.
3. Demonstration in running tests using an actual3. Demonstration in running tests using an actual3. Demonstration in running tests using an actual3. Demonstration in running tests using an actual3. Demonstration in running tests using an actualvehiclevehiclevehiclevehiclevehicle
3.1 T3.1 T3.1 T3.1 T3.1 Test conditionsest conditionsest conditionsest conditionsest conditions
The vehicle running tests were carried out on theSanyo Shinkansen line with the cooperation of the WestJapan Railway Company using the variable primary ver-tical dampers shown in Fig 2. The Shinkansen vehicle forthe test was of body-length 24.5 m and with a car-bodymass of 27,000 kg. In the running tests, the vehicle ranseveral times along the test section (approximately 50kmlong) at a constant speed to measure vibration for vari-ous control parameters of the primary vertical dampers.Figure 5 shows the conditions under which the variableprimary vertical dampers were mounted on the test ve-hicle. The test section included various track conditions,including curved and straight track, tunnels, bridges, sta-tions, and ballasted and slab track.
3.2 Effect on suppressing vibration3.2 Effect on suppressing vibration3.2 Effect on suppressing vibration3.2 Effect on suppressing vibration3.2 Effect on suppressing vibration
Figures 6(a) and 6(b) show the acceleration powerspectrum density (PSD) of the vertical vibration of thevehicle for a section of approximately 5 km (approximately60 s), during which there is marked car body vibration.The vehicle was running at a constant speed of 300 km/halong the section.
Under sky-hook control (Sky-hook in the figures), thevibration acceleration of the bogie frame (Fig. 6(a)) wasreduced throughout when around the frequency band ofapproximately 4-12 Hz, in comparison to when currentlyused passive primary vertical damper are employed (inthe figures marked ‘Passive’). As a result, the accelera-tion PSD at the car body center (Fig. 6(b)) was also re-Fig. 4 Control algorithmsFig. 4 Control algorithmsFig. 4 Control algorithmsFig. 4 Control algorithmsFig. 4 Control algorithms
(a) Bogie frame sky-hook control
(b) LQG control
Variable primary vertical damperAccelerometer
Car body
Des
irab
le d
ampi
ng f
orce
Des
irab
le d
ampi
ng f
orce
Des
irab
le d
ampi
ng f
orce
Des
irab
le d
ampi
ng f
orce
Bouncingmode
Bouncingmode
Pitchingmode
Pitchingmode
Filter Filter Filter Filter
Skyhookgain
Skyhookgain
Skyhookgain
Skyhookgain
Internal processesof controller
Variable primary vertical damperAccelerometer (bogie frame)
Car bodyAccelerometer(car body floor)
Des
irab
le d
ampi
ng f
orce
Des
irab
le d
ampi
ng f
orce
Kalman filter(Observer)
Internal processesof controller
Optimalregulator

1616161616 QR of RTRI, Vol. 52, No. 1, Feb. 2011
duced when in the vicinity of the frequency band of 4-12Hz, and in particular, the acceleration PSD peak at 8.6Hz was reduced by approximately 80%.
On the other hand, the components of the vibrationacceleration of the bogie frame at approximately 8-11 Hzwere selectively reduced in the case of using LQG control(LQG in the figures). Consequently, the acceleration PSDat the car body center (Fig. 6(b)) was also reduced at ap-proximately 8-11 Hz, and the acceleration PSD peak at
8.6 Hz was reduced by approximately 80%, similar to thecase of sky-hook control.
No increase in vibration due to the controlling damp-ers was observed in any frequency band in both cases,confirming the effective suppression of car body vibra-tion.
Ride comfort was evaluated using ride quality level(LT), which is a representative index for evaluating theride comfort of railway vehicles in Japan [17]. The smallerthe value of LT, the greater the comfort of passengers; dif-ferences of 3−5 dB in LT can be perceived by passengers[18].
LT was compared under different conditions to verifythe effect of control on improving ride comfort. To exam-ine the effect of the vibration components in each fre-quency band on LT, the vibration acceleration PSD wasweighted with the “ride comfort filter [17],” which is usedfor LT calculation, and the weighted acceleration powerwas calculated in each octave band. The results are shownin Fig.7.
In the case of the passive damper, the vibration com-ponent in the 8 Hz band (5.6 - 11.2Hz) was markedlylarger than that in other bands. This vibration compo-nent was reduced by the controlling the damper by ap-proximately 70%, thus reducing LT. The LT values rela-tive to that obtained with the passive damper (denotedas ∆LT in the figure) are -3.2 and -2.6 dB under sky-hookand LQG control, respectively; the effect of sky-hook con-trol on improving the ride comfort was greater than thatunder LQG control in this case. We consider that this isdue to the following reason: as shown in Fig.6(b), the ac-celeration PSD peak at 8.6 Hz is reduced by a similaramount by the two control laws; however, vibration issuppressed not only at approximately 8 Hz but also inthe wide frequency band of 4-12 Hz when using sky-hookcontrol. Therefore, the weighted vibration accelerationpower in the 8 and 4 Hz bands is reduced more than thatin the case of LQG control.
In our subsequent study [19], sky-hook control alsotends to be effective in improving the ride comfort par-ticularly when the natural frequency of the first bendingmode vibration of the car body was close to that of thebogie; LQG control was also effective in improving the
Fig. 6 VFig. 6 VFig. 6 VFig. 6 VFig. 6 Vehicle running test results for Shinkansenehicle running test results for Shinkansenehicle running test results for Shinkansenehicle running test results for Shinkansenehicle running test results for Shinkansen
Fig. 5 Installation of variable primary vertical damperFig. 5 Installation of variable primary vertical damperFig. 5 Installation of variable primary vertical damperFig. 5 Installation of variable primary vertical damperFig. 5 Installation of variable primary vertical damper
0.5 1 2 3 4 5 8 10 2010 3
10 2
10 1
100
Frequency [Hz]
Acc
eler
atio
n PS
D [
(m/s
2 )2 /Hz] Passive
Sky hookLQG
0.5 1 2 3 4 5 8 10 2010 4
10 3
10 2
Frequency [Hz]
Acc
eler
atio
n PS
D [
(m/s
2 )2 /Hz] Passive
Sky hookLQG
(a) Acceleration PSD of rear bogie frame
(b) Acceleration PSD at floor of car body center
Fig. 7 WFig. 7 WFig. 7 WFig. 7 WFig. 7 Weighted acceleration power at floor of car bodyeighted acceleration power at floor of car bodyeighted acceleration power at floor of car bodyeighted acceleration power at floor of car bodyeighted acceleration power at floor of car bodycenter (running test result)center (running test result)center (running test result)center (running test result)center (running test result)
0
0.01
0.02
0.03
0.04
Wei
ghte
d ac
cele
ratio
n po
wer
[(m
/s2 )2 ]
0.5 1 2 4 8 16 32Frequency [Hz]
Passive LT:ReferenceSky hook∆LT: 3.2[dB]LQG∆LT: 2.6[dB]
Variable primaryvertical damper
Axle box
Bogieframe

1717171717QR of RTRI, Vol. 52, No. 1, Feb. 2011
ride comfort, particularly when the two natural frequen-cies were further apart from each other. For effectivelysuppressing the car body vibration and improving the ridecomfort, it is important that an appropriate control lawis selected and its parameters are adapted to the specifi-cations of the vehicle.
Since LT intends to evaluate average ride comfort, LTvalue is usually calculated using 3±2 minutes measuredacceleration data [17]. In contrast, LT values obtained overa duration of 20 s (denoted “short-term LT” in this paper)was calculated in order to evaluate the ride comfort ateach point of the section.
Figure 8 shows short-term LT values calculated toconfirm the effect of the proposed system on improvingthe ride comfort over the entire test section (approxi-mately 50 km); this reveals that they are reduced overthe whole section under primary vertical damper (‘Sky-hook’ in the figure) control. In this running test, short-term LT was effectively reduced by at least 2.5 dB for mostparts of the test section when the vehicle was running at300 km/h.
Fig. 8 Short-term Fig. 8 Short-term Fig. 8 Short-term Fig. 8 Short-term Fig. 8 Short-term LT for center of car body floor in running for center of car body floor in running for center of car body floor in running for center of car body floor in running for center of car body floor in runningtest sectiontest sectiontest sectiontest sectiontest section
0 10 20 30 40 500
150300
Spee
d [k
m/h
]
Distance [km]
Shor
tterm
LT [
5dB
/1di
v]
0 10 20 30 40 50Distance [km]
PassiveSky hook
was greater than that under LQG control. In contrast,some other running tests results led to opposite result.For this reason, it is advisable to use the both controllaws as the specifications of the vehicle. The LQG con-troller in section 2.3, however, required more accelera-tion sensors (on the car body in addition to that on thebogies) than sky-hook controller, and also required largeamount of computational power.
The following improvements were made to the LQGcontroller discussed in section 2.3 to reduce its cost bydecreasing the number of sensors and to reduce the loadon the control system by decreasing the controller’s di-mensions. Figure 10 shows a block diagram of the im-proved controller.T Only the acceleration sensors on the bogie frames were
used to estimate the state values of the vehicle modeland control vibration. Therefore, the acceleration sen-sors on the car body can be removed. For the vehiclemodel used to estimate the state values and controlthe vibration, we used a 5-degrees-of-freedom modelwhich can take into account bouncing, pitching, andfirst bending mode vibration of the car body and bounc-ing of the bogie frame.
T Only the bouncing of the bogie frame was controlledby the LQG controller; the pitching of the bogie framewas controlled by the sky-hook control. This means areduction in the dimensions of the LQG controller, al-lowing a reduction in the calculation load on the con-trol system.
Fig. 9 Improved variable primary vertical damperFig. 9 Improved variable primary vertical damperFig. 9 Improved variable primary vertical damperFig. 9 Improved variable primary vertical damperFig. 9 Improved variable primary vertical damper
Damping force controlvalve with fail-safe function
Bottom Top
Fig. 10 Improved control algorithmFig. 10 Improved control algorithmFig. 10 Improved control algorithmFig. 10 Improved control algorithmFig. 10 Improved control algorithm
Variable primary vertical damperAccelerometer (bogie frame)
Car body
Des
irab
le d
ampi
ng f
orce
Des
irab
le d
ampi
ng f
orce
Kalman filter(Observer)
Internal processes of controller
Optimalregulator
Pitchingmode
Filter
Skyhookgain
Bouncing mode
Pitchingmode
Skyhookgain
Filter
4. Instrumental improvement for practical use4. Instrumental improvement for practical use4. Instrumental improvement for practical use4. Instrumental improvement for practical use4. Instrumental improvement for practical use
For practical application, some improvements havebeen made to the system which had already demonstratedto have beneficial effects on suppressing vibration in run-ning tests using actual Shinkansen vehicles.
4.1 Improvement of the variable primary vertical4.1 Improvement of the variable primary vertical4.1 Improvement of the variable primary vertical4.1 Improvement of the variable primary vertical4.1 Improvement of the variable primary verticaldamperdamperdamperdamperdamper
As explained in section 2.2, the variable primary ver-tical damper comprises a damping force control valve usedto control the damping force and a fail-safe valve installedso that the damping force characteristics of the variableprimary vertical damper are as close as possible to thoseof the currently used passive primary vertical damper whenthe system power is turned off. We improved the variableprimary vertical damper by integrating the functions ofthese control valves and successfully controlled the damp-ing force with a fail safety feature using a single controlvalve (Fig. 9).
4.2 Improvement of the control law4.2 Improvement of the control law4.2 Improvement of the control law4.2 Improvement of the control law4.2 Improvement of the control law
In the case of running tests shown in section 3.2, theeffect of sky-hook control on improving the ride comfort

1818181818 QR of RTRI, Vol. 52, No. 1, Feb. 2011
4.3 Evaluation of effect on suppressing vibration4.3 Evaluation of effect on suppressing vibration4.3 Evaluation of effect on suppressing vibration4.3 Evaluation of effect on suppressing vibration4.3 Evaluation of effect on suppressing vibration
We carried out running tests using our improved vari-able primary vertical damper and improved the controllaw on a Shinkansen vehicle, with the cooperation of theEast Japan Railway Company. Figure 11 shows themounting conditions of the variable primary verticaldamper on the test vehicle. Figure 12 shows the verticalvibration acceleration PSD of the vehicle for approxi-mately 5 km on a test section where the vehicle runs at aconstant speed of 315 km/h.
The components of the vertical vibration accelerationof the bogie frame at approximately 8-10 Hz were mark-edly reduced when the vertical vibration was controlledusing the improved variable primary vertical damper (Fig.12(a)). Consequently, the vertical vibration accelerationPSD at approximately 8-10 Hz was also reduced at thecenter of the car body (Fig. 12(b)). In particular, the PSDpeak due to the first bending mode vibration of the carbody at approximately 9 Hz was reduced by approximately80% of the PSD peak. As above, we confirmed that ourproposed system effectively suppressed vibration evenwhen using the improved variable primary verticaldamper and the control law with a reduced number ofmeasurement points.
5. Conclusions5. Conclusions5. Conclusions5. Conclusions5. Conclusions
High-speed vehicle running tests on commercial lineswere performed for this study while controlling the pri-mary suspension system in order to suppress the verticalbending vibration of the railway vehicle car body. Thisallowed successful demonstration of the significant effectsof the proposed system on the suppression of car bodyvibration and the improvement of ride comfort. The pro-posed system suppresses the first bending mode vibra-tion of the car body through the use of a simple structureand control law. Moreover, the proposed system can bemounted on currently-used vehicles with little modifica-tion of the vehicles because it simply requires changingthe dampers and mounting the accelerometers and con-
Fig. 1Fig. 1Fig. 1Fig. 1Fig. 11 Installation of modified variable primary vertical1 Installation of modified variable primary vertical1 Installation of modified variable primary vertical1 Installation of modified variable primary vertical1 Installation of modified variable primary verticaldamperdamperdamperdamperdamper
Fig. 12 VFig. 12 VFig. 12 VFig. 12 VFig. 12 Vehicle running test results for Shinkansen withehicle running test results for Shinkansen withehicle running test results for Shinkansen withehicle running test results for Shinkansen withehicle running test results for Shinkansen withmodified variable primary vertical dampermodified variable primary vertical dampermodified variable primary vertical dampermodified variable primary vertical dampermodified variable primary vertical damper
(a) Acceleration PSD of rear bogie frame
(b) Acceleration PSD at floor of car body cente
0.5 1 2 3 4 5 8 10 2010 3
10 2
10 1
100
Frequency [Hz]
Acc
eler
atio
n PS
D [
(m/s
2 )2 /Hz] Passive
LQG
0.5 1 2 3 4 5 8 10 20
10 4
10 3
10 2
Frequency [Hz]
Acc
eler
atio
n PS
D [
(m/s
2 )2 /Hz]
PassiveLQG
trollers; as such, the system is highly practical. In a sub-sequent study, endurance running tests were carried outover a distance of approximately 75,000 km using theimproved system and additional improvements to the sys-tem have been made. Thus, the development of this sys-tem has moved from demonstration of a principle to thestage of practical application.
AcknowledgmentAcknowledgmentAcknowledgmentAcknowledgmentAcknowledgment
We would like to express our deepest gratitude to therelevant personnel at the Hitachi Automotive Systems,Ltd for their contribution and the development of thevariable primary vertical damper; and also to the rel-evant personnel at the West Japan Railway Companyand the East Japan Railway Company, who providedvaluable opportunities for performing the vehicle run-ning tests.
ReferencesReferencesReferencesReferencesReferences
[1] Oishi, T, et al., “Development of Advanced semi-ac-tive suspension system for Shinkansen vehicle,” InProceedings of the International Symposium on Speed-up
Variable primaryvertical damper

1919191919QR of RTRI, Vol. 52, No. 1, Feb. 2011
Safety and Service Technology for Railway and MaglevSystems 2003(STECH'03), Tokyo, Japan, Aug.19-22,2003, pp. 220-224.
[2] Tahara, M, et al., “Practical use of an active suspen-sion system for railway vehicle,” In Proceedings of theInternational Symposium on Speed-up Safety and Ser-vice Technology for Railway and Maglev Systems2003(STECH'03), Tokyo, Japan, Aug.19-22, 2003,pp.225-228.
[3] Suzuki, Y. and Akutsu, K., “Theoretical analysis offlexural vibration of car body,” Quarterly Report of RTRI,Vol. 31, No.1, pp.42-48, 1990.
[4] Morimura, T. and Seki, M., “The course of achieving270 km/h operation for Tokaido Shinkansen. Part 1:technology and operations overview,” Proceedings ofthe Institution of Mechanical Engineers, Part F: Journalof Rail and Rapid Transit, Vol. 219, No.1, pp.21-26,2005.
[5] Suzuki, Y. et al., “Methods for flexural vibration damp-ing for rolling stock carbody,” Quarterly Report of RTRI,Vol. 38, No.3, pp.123-128, 1997.
[6] Ishikawa, R. et al., “Decrease of Vehicle Body Bend-ing Vibration by Dynamic Damper,” In Proceedings ofthe 68th Annual Meeting of the Japan Society of Mechani-cal Engineers, Tokyo, Japan, Mar. 4, 1991, Vol. C,pp.531-533 (in Japanese).
[7] Tomioka, T. et al., “Reduction of bending vibration inrailway vehicle carbodies using carbody-bogie dy-namic interaction,” Vehicle System Dynamics, Vol. 48,Supplement, pp.467-486, 2010.
[8] Takigami, T. et al., “Bending Vibration Suppressionof Railway Vehicle Carbody with Piezoelectric Ele-ments (Experimental Results of Excitation Tests witha Commuter Car),” Journal of Mechanical Systems forTransportation and Logistics, Vol.1, No.1, pp.111-121,2008.
[9] G., Schandl et al., “Comfort enhancement by an ac-tive vibration reduction system for a flexible railwaycar body,” Vehicle System Dynamics, Vol.45, No.9,pp.835-847, 2007.
[10]Kambayashi, K.et al., “Development of an active vi-
bration control systems for high speed railway ve-hicles,” In Proceedings of the 5th Jointed Railway Tech-nology Symposium (J-Rail'98), Tokyo, Japan, Nov. 25-27, 1998, pp. 499-502 (in Japanese).
[11]Hac, A., “Stochastic Optimal Control of Vehicles withElastic Body and Active Suspension,” Transactions ofthe American Society of Mechanical Engineers, Journalof Dynamic Systems and Control, Vol.108, No.2, pp.106-110, 1986.
[12]Foo, E., and Goodall, R. M., “Active suspension con-trol of flexible-bodied railway vehicles using electro-hydraulic and electro-magnetic actuators,” ControlEngineering Practice, Vol. 8, No.5, pp.507-518, 2000.
[13]Sugahara, Y. et al., “Suppression of Vertical Vibra-tion in Railway Vehicles by Damping Force Controlof Primary Suspension Using an LQG Controller,”Journal of System Design and Dynamics, Vol.2, No.1,pp.251-262, 2008.
[14]Kimura, T., “Development of Semi-Active SuspensionSystem,” Journal of Society of Automotive Engineers ofJapan, Vol. 58, No.4, pp.76-80, 2004 (in Japanese).
[15]Karnopp, D. et al., “Vibration Control Using Semi-Active Force Generators,” Transactions of the Ameri-can Society of Mechanical Engineers, Journal of Engi-neering for Industry, Vol.96, No.2, pp.619-626, 1974.
[16]B.D.O. Anderson et al., “Linear Optimal Control,”Prentice-Hall, 1971.
[17]Suzuki, H., “Research trends on riding comfort evalu-ation in Japan,” Proceedings of the Institution of Me-chanical Engineers, Part F: Journal of Rail and RapidTransit, Vol. 212, No.1, pp.61-72, 1998.
[18]Yamazaki, K. et al., “A study on the evaluation of ridecomfort,” Bulletin of Railway Labor Science ResearchInstitute, Vol. 36, pp.57-73, 1982 (in Japanese).
[19]Sugahara, Y. et al., “Suppression of Vertical BendingVibration in Railway Car Bodies by Primary Suspen-sion Damping Control (Results of Running Tests Us-ing Shinkansen Vehicles),” 21th International Sympo-sium on Dynamics of Vehicles on Roads and Tracks(IAVSD'09), Stockholm, Sweden, Aug. 17-21, 2009,Paper No. 13.