Embed Size (px)
Citation preview

Technische Universität Berlin
Fakultät IV Elektrotechnik und Informatik
Fachgebiet Regelungssysteme
Leitung: Prof. Dr.-Ing. Jörg Raisch
Praktikum Grundlagen der Regelungstechnik
Sommersemester 2012
Versuchsbeschreibung zum
Versuch 1: Drehzahlregelung eines Gleichstrommotors(Version vom 24.April 2012)
Teil 1a (vorzubereiten bis zum 25.April 2012) und
Teil 1b (vorzubereiten bis zum 09.Mai 2012)
Betreuung: Christian Schmuck, Stefanie Teinz
Inhaltsverzeichnis
1 Einführung 2
2 Versuchsaufbau 2
3 Versuchsteil 1a 3
3.1 Modellbildung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33.1.1 Leistungsverstärker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33.1.2 Gleichstrommotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43.1.3 Massenscheibe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.2 Stromregelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.3 Vorbereitungsaufgaben 1a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.4 Versuchsdurchführung und Auswertung 1a . . . . . . . . . . . . . . . . . . . . . 7
4 Versuchsteil 1b 7
4.1 Drehzahlregelung mit Kaskadenstruktur . . . . . . . . . . . . . . . . . . . . . . 74.1.1 Aufbau und Wirkprinzip einer Kaskadenregelung . . . . . . . . . . . . . 84.1.2 Entwurf einer Kaskadenregelung . . . . . . . . . . . . . . . . . . . . . . 84.1.3 Kaskadenregelung für die Motordrehzahl . . . . . . . . . . . . . . . . . . 9
4.2 Anti-Windup-Schaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94.2.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104.2.2 Entwurf einer Anti-Windup-Schaltung . . . . . . . . . . . . . . . . . . . 11
4.3 Vorbereitungsaufgaben 1b . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114.4 Versuchsdurchführung und Auswertung 1b . . . . . . . . . . . . . . . . . . . . . 13
A Nützliche Scilab-Befehle 13

1 Einführung
In diesem Versuch wird für eine reale elektrische Antriebsstrecke mit permanenterregtem Gleich-strommotor eine kontinuierliche Kaskadenregelung entworfen und anschlieÿend erprobt. Dabeisollen das Wurzelorts- und das Frequenzkennlinienverfahren angewendet werden. Auÿerdemwird der sogenannte Windup-Eekt behandelt. Ziel der Versuchsreihe ist der Entwurf einerRegelstruktur, die die Drehzahl des Motors bei sprungförmig veränderlichem Lastmoment aufeinen konstanten Sollwert führt.
Abbildung 1 zeigt den schematischen Aufbau eines drehzahlgeregelten Antriebs, wie er in derPraxis häug verwendet wird. Die Struktur wird Kaskadenregelung genannt.
DrehzahlreglerSolldrehzahl
StromreglerSollstrom Stellglied
(Stromrichter/Verstarker)
Ankerstrom
Motor
Drehzahl
Getriebe Last
Stormoment
Regeleinrichtung Antriebstrecke
Abbildung 1: Prinzipieller Aufbau eines drehzahlgeregelten Antriebs
Der Entwurf des Kaskadenregelkreises wird auf zwei Versuchstermine aufgeteilt. Im Teil 1a wirdzunächste eine Regelung für den Ankerstrom erarbeitet. Ziel dieses ersten Teils ist das Verständ-nis für den Versuchsstand und das zugehörige Modell sowie die Anwendung des Wurzelorts- undFrequenzkennlinienverfahrens für die Auslegung des Stromregelkreises. Die Ergebnisse dienenals Basis für den Versuchsteil 1b, in dem der unterlagerte Stromregelkreis um eine Drehzahl-regelung ergänzt wird. Hier soll das Prinzip der Kaskadenregelung wiederholt und verstandenwerden. Schlieÿlich werden beide Regler durch eine Anti-Windup-Schaltung weiter verbessert.
2 Versuchsaufbau
Die Abbildung 2 zeigt ein Foto des Versuchsaufbaus mit allen wichtigen Bestandteilen. DieStrecke besteht aus einem Leistungsverstärker und einer Gleichstrommaschine. Zur Erhöhungdes Trägheitsmoments ist eine Massenscheibe auf der Welle montiert. Um ein Lastmoment zuerzeugen, kann ein Filzblock über eine Feder gegen die Massenscheibe gepresst werden.
Die Leistung des vom Regler kommenden Stellsignals reicht meist nicht aus, um den Motordirekt zu betreiben. Deshalb muss das Stellsignal verstärkt werden. Der dazu vorgesehene Leis-tungsverstärker besitzt PT1-Dynamik mit einer sehr kleinen Verzögerungszeitkonstante Tv undliefert eine maximale Ausgangsspannung von 15V.
Die Ansteuerung erfolgt über eine Datenerfassungskarte. Mit einer Echtzeitanwendung kann dieEingangsspannung des Leistungsverstärkers vorgegeben werden. Ebenso werden die Messwerteangezeigt und gespeichert. Als Messgröÿen stehen der Ankerstrom iA und die Winkelgeschwin-digkeit ω direkt zur Verfügung. Das bei der Messung des Ankerstroms auftretende Rauschen
2

Abbildung 2: Foto des Versuchsaufbaus
muss beim Reglerentwurf bedacht werden. Die Winkelgeschwindigkeit wird über einen Tacho-generator erfasst.
Die Regler sollen in Scilab/Scicos realisiert werden. Am Versuchsstand wird mit den erstelltenScicos-Diagrammen ein echtzeitfähiges Programm erstellt, welches den entworfenen Regler unddie reale Regelstrecke zu einem Regelkreis verkoppelt. Die Parameter des Versuchsaufbaus sindin Tabelle 1 gegeben.
Gleichstrommotor
Ankerwiderstand RA = 10,6 ΩAnkerinduktivität LA = 0,82 mHMotorkonstante km = 0,0527 N m A−1
Ankerträgheitsmoment JM = 1,16 · 10−6 kg m2
Reibungskonstante cµ = 0,4 · 10−6 N m s
Massenscheibe
Masse Ms = 68 gRadius rs = 2,5 cm
Leistungsverstärker
Zeitkonstante Tv = 0,2 · 10−3 sVerstärkung V = 3
Tabelle 1: Parameterwerte des Versuchsaufbaus
3 Versuchsteil 1a
Der erste Versuchsteil beginnt mit der Modellbildung für die Regelstrecke. Als vorbereitenderSchritt für die gewünschte Kaskadenregelung der Motordrehzahl soll danach ein einschleigerStandardregelkreis für den Ankerstrom der Gleichstrommaschine entworfen werden.
3.1 Modellbildung
Zur Erstellung eines vollständigen Modells werden die drei Teilsysteme Leistungsverstärker,Gleichstrommotor und Massenscheibe einzeln betrachtet.
3.1.1 Leistungsverstärker
Die am Ausgang des Reglers zur Verfügung stehende elektrische Leistung reicht nicht aus, umden Gleichstrommotor zu betreiben. Der deshalb eingesetzte Leistungsverstärker verstärkt die
3

Eingangsspannung u und liefert am Ausgang die Spannung uv an den Motor. Das PT1-Verhaltendes Verstärkers wird durch die Dierentialgleichung
Tvuv(t) + uv(t) = V u(t)
beschrieben. Die Eingangsgröÿe u ist die Stellgröÿe der Gesamtversuchsstrecke und wird späterdurch den Stromregler vorgegeben.
3.1.2 Gleichstrommotor
Für einen permanenterregten Gleichstrommotor kann das in Abbildung 3 dargestellte Ersatz-schaltbild herangezogen werden. Vereinfachend wird angenommen, dass die Ankerinduktivität
ω(t),mM(t)
iA(t)
ui(t)uv(t)
LARA
Abbildung 3: Ersatzschaltbild des Gleichstrommotors
LA und der resultierende Ankerwiderstand RA konstant sind. Aus der angelegten Spannunguv resultiert ein Ankerstrom iA. Dieser Strom erzeugt am Rotor des Motors das MotormomentmM (t) = kmiA(t), wobei km die Maschinenkonstante des Motors ist. Wenn sich der Rotordreht, wird eine Spannung ui induziert, die man auch elektromotorische Kraft (EMK) nennt.Sie steigt proportional mit der Winkelgeschwindigkeit ω: ui(t) = kmω(t).
Durch Anwendung des Maschensatzes kann eine Dierentialgleichung für den Ankerstrom ge-wonnen werden.
3.1.3 Massenscheibe
Das Motormoment mM beschleunigt den Rotor des Motors und die daran befestigte Massen-scheibe. Dem Motormoment entgegen wirken ein von auÿen einstellbares Lastmoment mL, diemotoreigenen Reibungsmomente mR und mH , sowie das Trägheitsmoment mT von Rotor undMassenscheibe. Letzteres ergibt sich aus der Winkelbeschleunigung ω und den Massenträgheits-momenten des Rotors JM und der Massenscheibe JS = 1
2MSr2S zu mT (t) = (JS +JM )ω(t). Das
Reibungsmoment mR ist geschwindigkeitsproportional mit mR(t) = cµω(t) und wird durch denReibungskoezienten cµ bestimmt. Das HaftreibungsmomentmH soll vernachlässigt werden.
Um die Bewegungsgleichung für die Massenscheibe und den Rotor aufzustellen, müssen dieangreifenden Momente bilanziert werden.
4

mL(t),mH ,mR(t),mT (t)mM(t)
Massenscheibe
ω(t)
Abbildung 4: Momente an der Massenscheibe
3.2 Stromregelung
Als erster Teil der später im Versuchsteil 2b angestrebten Kaskadenregelung soll ein einschlei-ger Standardregelkreis für den Ankerstrom des Gleichstrommotors entworfen werden. Die Ab-bildung 5 zeigt das Blockschaltbild des Regelkreises. Die Regelgröÿe ist der Ankerstrom iA.Die Stellgröÿe ist die Eingangsspannung u des Verstärkers. Ziel der Stromregelung ist es, einenvorgegebenen Ankerstrom ri einzustellen und Störungen der Betriebsspannung auszuregeln.
Ki GuiiAuri
Abbildung 5: Stromregelkreis
Der Einsatz eines eigenen unterlagerten Reglers für den Strom im Rahmen der Kaskadenrege-lung hat mehrere Vorteile. Wird bei einer Gleichstrommaschine die Ankerspannung vergröÿert,führt dies zu einer Erhöhung des Ankerstromes. Dadurch wird ein höheres Drehmoment erzeugt.Der Motor wird so lange beschleunigt, bis die Gegenspannung im Anker den Ankerstrom wiederverkleinert. Die Dynamik des Ankerstroms ist dabei wesentlich schneller als die Dynamik derMotordrehzahl. Dieser Unterschied kann durch einen gesonderten unterlagerten Stromregelkreisbesser berücksichtigt werden.
Auÿerdem ist die Gegenspannung für kleine Drehzahlen z.B. beim Anfahren des Motors klein,wodurch der Ankerstrom bei hoher angelegter Spannung sehr hoch werden kann. Um Über-lastungen in der Stromversorgung oder im Antriebssystem zu vermeiden, darf der Ankerstromzulässige Werte der Amplitude und des Anstieges nicht überschreiten. Auch das kann durcheinen eigenen Regler für den Strom direkt berücksichtigt werden.
Beim Entwurf des Stromreglers darf das Messrauschen des Ankerstromsignals nicht auÿer Achtgelassen werden, da sonst ein zufriedenstellender Betrieb des Reglers nicht gesichert ist.
3.3 Vorbereitungsaufgaben 1a
Benutzen Sie für die Lösung der Aufgaben 4, 6d und 79 die Software Scilab/Scicos und schrei-ben Sie ihre Reglerskripte so, dass sie leicht zu verändern und korrigieren sind. Führen Sie ihreSimulationen im ersten Teil in Scilab durch.
5

1. Leiten Sie das vollständige lineare Zustandsmodell für die Regelstrecke her. Stellen Siehierfür zunächst die Dierentialgleichung für den Ankerstrom und die Bilanzgleichung derDrehmomente an der Massenscheibe auf. Welche Komponenten hat der Zustandsvektor?
2. Zeichnen Sie das Blockschaltbild der aus Leistungsverstärker und Gleichstrommaschinemit Schwungscheibe bestehenden Regelstrecke und beschriften Sie die Signalpfeile mitden zugehörigen Gröÿen. Es sollen ausschlieÿlich Summations-, Verstärkungs- und Inte-gratorblöcke verwendet werden.
3. Der Leistungsverstärker soll nun durch die statische Verstärkung V approximiert wer-den, da er eine schnelle Dynamik besitzt, die vernachlässigt werden kann. Wie lautetdas resultierende Zustandsraummodell? Verwenden Sie dieses Modell für alle weiterenBetrachtungen.
4. Bestimmen Sie die Übertragungsfunktion Gui(s) = IA(s)U(s) zwischen der Eingangsspannung
u des Leistungsverstärkers und dem Ankerstrom iA. Vereinfachen Sie die Übertragungs-funktion Gui durch Vernachlässigung sehr schneller Dynamikanteile der Strecke, d.h. Ver-nachlässigung von Polen mit betragsmäÿig sehr hohem negativen Realteil. Wie lautetdie resultierende vereinfachte Übertragungsfunktion Gui? Warum ist diese Vereinfachungzulässig? Verwenden Sie im Folgenden die vereinfachte Übertragungsfunktion Gui.
5. Wiederholen Sie das Thema Wurzelortskurve!
6. Entwerfen Sie einen mit einem PT1-Glied verketteten PI-Regler mit der folgenden Struk-tur:
Ki(s) = kis− s0,i
s
−s1
s− s1, ki, s0,i, s1 ∈ R, ki > 0.
a) Welchen Vorteil besitzt die gewählte Reglerstruktur gegenüber einem reinen PI-Regler? Welche Eekte erwarten Sie für einen reinen PI-Regler im geschlossenenRegelkreis?
b) Platzieren Sie die Polstelle s1 des Tiefpasses anhand von Überlegungen mit derWurzelortskurve. Ihr Ziel sollte eine möglichst schnelle Reaktion des Regelkreisessein.
c) Legen Sie nun weiterhin anhand der Wurzelortskurve die Nullstelle s0,i des Reglersfest, sodass bei einer geeigneten Wahl von ki das Potential besteht, einen schnellenRegler zu entwerfen.
d) Die Sprungantwort des geschlossenen Kreises soll nach 0, 02s nur noch eine Regel-abweichung von 5% aufweisen. Bestimmen Sie ki mit Hilfe von Simulationen derFührungssprungantwort.
7. Berechnen Sie die Störübertragungsfunktion IA(s)Du(s) des Regelkreises, die den Einuss einer
Störspannung du am Eingang des Leistungsverstärkers auf den Ankerstrom iA beschreibt.Simulieren Sie die Störsprungantwort.
8. Zeichnen Sie die Amplitudenfrequenzgänge der Sensitivitätsfunktion Si(s) und der kom-plementären Sensitivitätsfunktion Ti(s) des geschlossenen Regelkreises in dem Bereichω = 10−3 rad
s . . . 103 rads , um das Verhalten der Stromregelung für den gesamten Frequenz-
bereich beurteilen zu können. Machen Sie Aussagen darüber, für welche Frequenzbereicheder Referenz- und Störgröÿe gutes Regelverhalten erzielt wird und in welchen Frequenz-bereichen auftretendes Messrauschen sich kaum auf die Regelgröÿe auswirkt.
6

9. Erstellen Sie ein Blockschaltbild des Reglers auf Basis zweier Integratoren, in welchemder PI-Anteil und PT1-Anteil in Reihe geschaltet sind. Die Parameter ki, s0,i, s1 sollendirekt in die Verstärkungsblöcke eingehen. Implementieren Sie den kompletten Regelkreisals Scicos-Diagramm und bringen Sie Ihre Simulationsdateien zum Durchführungsterminmit!
3.4 Versuchsdurchführung und Auswertung 1a
1. Ersetzen Sie in Ihrem vorbereiteten Scicos-Regelkreis den Block der Motor-Regelstreckedurch den auf dem Laborrechner zur Verfügung stehenden Block zu Ansteuerung derMotorhardware und erstellen Sie mit dem Betreuer das echtzeitfähige Programm zurMotoransteuerung.
2. Nehmen Sie die Führungssprungantwort des Stromregelkreises auf, indem Sie bei einge-schaltetem Reibmoment den Strom sprunghaft von 0A auf 0, 3A erhöhen. Zeichnen Siezusätzlich die Gröÿen u und ω auf. Wichtig: Die Bremse muss dabei so eingestellt sein,dass sich die Schwungscheibe nach dem Sprung nur langsam dreht und nicht mehr be-schleunigt. Beschreiben und diskutieren Sie das Regelkreisverhalten! Vergleichen Sie dasErgebnis mit dem der Vorbereitungsaufgabe 6d!
3. Nehmen Sie die Störsprungantwort des Systems auf. Schalten Sie hierfür bei konstantemLastmoment (konstante Winkelgeschwindigkeit durch passend eingestellte Bremse!) undeinem Stromsollwert von 0, 3A eine sprunghafte Störspannung von −1V auf den Eingangdes Leistungsverstärkers. Zeichnen Sie zusätzlich die Gröÿen u und ω auf. Beschreibenund diskutieren Sie das Regelkreisverhalten! Vergleichen Sie das Ergebnis mit dem derVorbereitungsaufgabe 7!
4. Erweitern Sie das Scilab-Skript, das Sie für die Simulation geschrieben haben, um eineRoutine, die es ermöglicht, aus den gespeicherten Versuchsdaten aussagekräftige Plots zugenerieren. Binden Sie diese in Ihr Protokoll ein!
4 Versuchsteil 1b
Ziel des zweiten Versuchteils ist es, den bereits entworfenen Stromregler durch einen äuÿerenDrehzahlregler zu einem Kaskadenregelkreis zu erweitern. Die resultierende Drehzahlregelungsoll vorgegebene Winkelgeschwindigkeiten einstellen und Störungen in Form von Lastmoment-änderungen kompensieren. Zusätzlich soll eine Anti-Windup-Schaltung für beide Regler derKaskadenregelung entworfen werden, um Windup-Eekte und eine Überlastung des Leistungs-verstärkers zu verhindern.
4.1 Drehzahlregelung mit Kaskadenstruktur
Für die Drehzahlregelung elektrischer Antriebe werden sehr häug Kaskadenregelkreise einge-setzt. Dieser Abschnitt wiederholt zunächst den Aufbau, das Wirkprinzip und den Entwurf vonRegelkreisen mit Kaskadenstrukur. Am Ende wird die Methode auf das vorliegende Beispielder Drehzahlregelung angewendet.
7
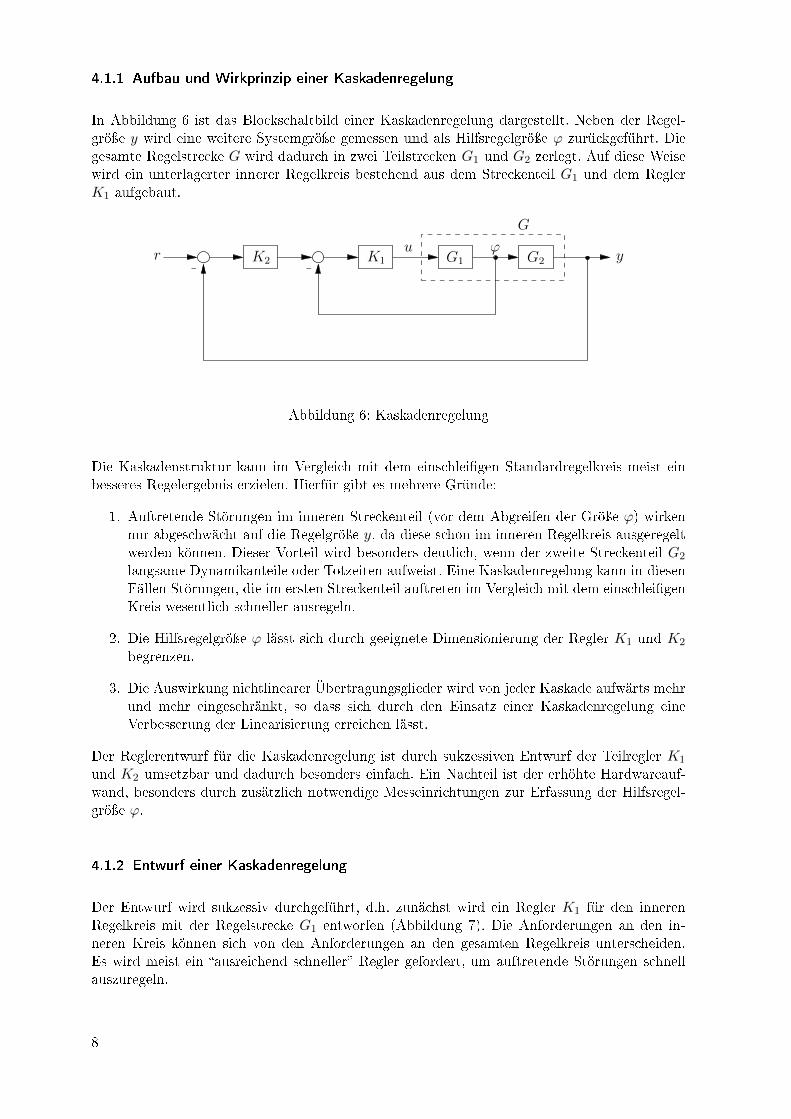
4.1.1 Aufbau und Wirkprinzip einer Kaskadenregelung
In Abbildung 6 ist das Blockschaltbild einer Kaskadenregelung dargestellt. Neben der Regel-gröÿe y wird eine weitere Systemgröÿe gemessen und als Hilfsregelgröÿe ϕ zurückgeführt. Diegesamte Regelstrecke G wird dadurch in zwei Teilstrecken G1 und G2 zerlegt. Auf diese Weisewird ein unterlagerter innerer Regelkreis bestehend aus dem Streckenteil G1 und dem ReglerK1 aufgebaut.
ϕ
G
K2r K1 G1 G2 y
y
u
Abbildung 6: Kaskadenregelung
Die Kaskadenstruktur kann im Vergleich mit dem einschleigen Standardregelkreis meist einbesseres Regelergebnis erzielen. Hierfür gibt es mehrere Gründe:
1. Auftretende Störungen im inneren Streckenteil (vor dem Abgreifen der Gröÿe ϕ) wirkennur abgeschwächt auf die Regelgröÿe y, da diese schon im inneren Regelkreis ausgeregeltwerden können. Dieser Vorteil wird besonders deutlich, wenn der zweite Streckenteil G2
langsame Dynamikanteile oder Totzeiten aufweist. Eine Kaskadenregelung kann in diesenFällen Störungen, die im ersten Streckenteil auftreten im Vergleich mit dem einschleigenKreis wesentlich schneller ausregeln.
2. Die Hilfsregelgröÿe ϕ lässt sich durch geeignete Dimensionierung der Regler K1 und K2
begrenzen.
3. Die Auswirkung nichtlinearer Übertragungsglieder wird von jeder Kaskade aufwärts mehrund mehr eingeschränkt, so dass sich durch den Einsatz einer Kaskadenregelung eineVerbesserung der Linearisierung erreichen lässt.
Der Reglerentwurf für die Kaskadenregelung ist durch sukzessiven Entwurf der Teilregler K1
und K2 umsetzbar und dadurch besonders einfach. Ein Nachteil ist der erhöhte Hardwareauf-wand, besonders durch zusätzlich notwendige Messeinrichtungen zur Erfassung der Hilfsregel-gröÿe ϕ.
4.1.2 Entwurf einer Kaskadenregelung
Der Entwurf wird sukzessiv durchgeführt, d.h. zunächst wird ein Regler K1 für den innerenRegelkreis mit der Regelstrecke G1 entworfen (Abbildung 7). Die Anforderungen an den in-neren Kreis können sich von den Anforderungen an den gesamten Regelkreis unterscheiden.Es wird meist ein ausreichend schneller Regler gefordert, um auftretende Störungen schnellauszuregeln.
8

K2 G2
G
r yK1 G1u
y
ϕ
Abbildung 7: Entwurf des inneren Regelkreises
Anschlieÿend kann die Übertragungsfunktion
T1(s) =K1(s)G1(s)
1 +G1(s)K1(s)
des geschlossenen inneren Kreises bestimmt werden. Die Übertragunsfunktion G′ der resultie-renden Regelstrecke des äuÿeren Regelkreises ergibt damit zu G′(s) = T1(s)G2(s).
K2
G′
G
T1 G2 yr
Abbildung 8: Entwurf des äuÿeren Regelkreises
Der Regler K2 kann nun anhand eines einschleigen Kreises mit der Regelstrecke G′ entworfenwerden (Abbildung 8). Hierbei müssen die Anforderungen an den gesamten Regelkreis erfülltwerden.
4.1.3 Kaskadenregelung für die Motordrehzahl
Der Kaskadenregelkreis mit den für die Regelung der Motordrehzahl relevanten Gröÿen undBezeichnungen wird in Abbildung 9 gezeigt. Im Inneren ist der unterlagerte Stromregelkreisaus Abbildung 5 zu erkennen, der bereits im Versuchsteil 1a entworfen wurde. Es soll nun derRegler Kω des äuÿeren Regelkreises erarbeitet werden.
4.2 Anti-Windup-Schaltung
In der Praxis spielen Stellgröÿenbeschränkungen sehr häug eine Rolle und müssen beim Regler-entwurf beachtet werden. Wenn ein Regler mit integrierendem Anteil verwendet wird, könnenunerwünschte Eekte auftreten, die durch eine erweiterte Reglerstruktur verhindert werdenkönnen.
9

Kω Ki ω
y
u iAGui Giω
rωri
Guω
G′ω
Abbildung 9: Drehzahlregelkreis mit Kaskadenstruktur
Regler Strecke
R
R
R
r yuuR
Stellgroßenbeschrankung
u
uRumax−umax
Abbildung 10: Regelkreis mit Stellgröÿenbeschränkung
4.2.1 Problemstellung
Bei dem verwendeten Versuchsaufbau liegt wie bei fast allen realen Systemen eine Stellgröÿen-beschränkung vor. Der Verstärker kann am Ausgang höchstens ±15 V liefern. Da der Verstär-kungsfaktor V = 3 des Verstärkers bekannt ist, kann diese Begrenzung auf den Eingang u desVerstärkers umgerechnet werden und man erhält die Maximalwerte ±umax = ±5 V. Überschrei-tet u am Verstärkereingang diese Grenzen, erhält man am Ausgang nicht mehr die proportionalverstärkte Spannung sondern nur den konstanten Maximalwert von ±15 V. Man sagt dann, dasStellglied geht in die Sättigung. Verallgemeinert liegt das in Abbildung 10 dargestellte Problemvor. Die Sättigung wird durch die sat-Funktion
sat(uR) =
−umax, falls uR < −umaxuR, falls − umax ≤ uR ≤ umaxumax, falls uR > umax.
Überschreitet die geforderte Stellgröÿe uR ihren Maximalwert, so tritt die Nichtlinearität dersat-Funktion in Kraft und führt zu störendem Verhalten. Die entstehenden Eekte bezeich-net man als Windup. Da in der Praxis jede reale Regelstrecke eine Stellgröÿenbeschränkungaufweist, können diese Eekte in allen Regelkreisen auftreten, deren Regler einen I-Anteil be-sitzt.
Der Eekt lässt sich wie folgt erklären. Wenn z.B. infolge eines Störgröÿenanstieges die vomRegler geforderte Gröÿe uR den Maximalwert übersteigt, so geht das Stellglied in die Sättigung.Eine weitere Erhöhung der Stellgröÿe bleibt dann ohne Einuss auf die Strecke, da die Stellgröÿenicht über den Begrenzungswert erhöht werden kann. Der Regelfehler r−y bleibt dadurch gröÿerals erwartet und wird durch den vorhandenen I-Anteil immer weiter vergeblich auntegriert.Der I-Anteil des Reglers kann dadurch sehr stark anwachsen. Er wird erst wieder abgebaut, wennder Regelfehler sein Vorzeichen wechselt. Die Gröÿe u verweilt noch solange in der Sättigung,
10

u
umax−umax uR
uR
R
u y
R
R
R
r
Regler
Stellgroßenbeschrankung
Strecke
γ
k
−s0
∫
Abbildung 11: Regelkreis mit PI-Regler und Anti-Windup-Schaltung
bis der I-Anteil weit genug abgebaut ist. Das kann unter Umständen sehr lange dauern und dieReglung für längere Zeit stark stören.
4.2.2 Entwurf einer Anti-Windup-Schaltung
Das Problem entsteht beim I-Anteil des Reglers, der den Regelfehler trotz Stellgröÿe in derSättigung weiter integriert. Eine Möglichkeit dies zu unterbinden bietet die nun vorgestellteAnti-Windup-Schaltung. Ziel ist es, den Integriervorgang abzuschalten oder zumindest abzu-schwächen, sobald die Stellgröÿe in der Sättigung ist.
In der in Abbildung 11 dargestellten Schaltung wird die Dierenz zwischen der vom Reglergeforderten Stellgröÿe uR und der begrenzten Stellgröÿe u über einen Faktor γ auf den In-tegratoreingang zurückgekoppelt. Die Schaltung wird nur bei Überschreitung der Begrenzung(|uR| > |umax|) aktiv, da ansonsten die Dierenz u−uR verschwindet. Bei uR > umax wird dieDierenz negativ und das Eingangssignal des I-Anteils wird verringert. Damit wird dem weite-ren Ansteigen des I-Anteils und damit dem weiteren Ansteigen der Gröÿe uR entgegengewirkt.Bei uR < −umax funktioniert die Schaltung in analoger Weise. Über den Parameter γ kanneingestellt werden, wie stark die Rückführung wirkt.
Alternativ bieten sich Anti-Windup-Schaltungen an, die den Integratoreingang bei Überschrei-tung der Beschränkung fest auf Null setzen. Derartige Schaltungen sollen hier aber nicht weiterbetrachtet werden.
4.3 Vorbereitungsaufgaben 1b
Führen Sie die Simulationen dieses Versuchsteils in Scicos durch. Implementieren Sie dafür diePI-Anteile der beiden Regler durch Integratorschaltungen wie in Abbildung 12 und nicht alsÜbertragungsfunktionsblöcke.
1. Ermitteln Sie die Übertragungsfunktion G′ω(s) = Ω(s)Ri(s)
der nun relevanten Regelstrecke,die den unterlagerten Stromregelkreis aus Versuchsteil 1a enthält.
2. Als Drehzahlregler soll ein PI-Glied
Kω(s) = kωs− s0,ω
s, kω, s0,ω ∈ R
verwendet werden.
11

$$\int$$
$$\int$$
−s0
∫
k
Abbildung 12: Struktur eines PI-Reglers
a) Begründen Sie, warum diese Reglerstruktur sinnvoll ist.
b) Der Reglerentwurf soll nach dem Frequenzkennlinienverfahren durchgeführt werden.Zeichnen Sie dafür zunächst das Bode-Diagramm von G′ω.
c) Wählen Sie zunächst das aus der Vorlesung bekannte Entwurfsvorgehen, indem Siemit der Nullstelle s0,ω des Reglers die langsamste Polstelle der Strecke kürzen. Be-stimmen Sie dann mit Hilfe von Simulationen die Verstärkung kω so, dass der ge-schlossene Regelkreis eine Ausregelzeit1 von etwa 0.6 Sekunden aufweist und dasÜberschwingen einen Wert von 20% nicht übersteigt. Rufen Sie sich in Erinnerung,wie die Kenngröÿen Überschwingweite, Ausregelzeit, Phasenreserve und Durch-trittsfrequenz miteinander in Beziehung stehen!
d) Bei Sprüngen der Führungsgröÿe rω von 0 auf Werte bis zu 180 rads soll die Stell-
gröÿenbeschränkung von −5V < u < 5V nicht verletzt werden. Überprüfen Siesimulativ, ob Ihr Regler diese Forderung erfüllt. Falls nicht, korrigieren Sie ihre Reg-lerparameter, sodass die Forderung erfüllt wird. Wie lautet die ÜbertragungsfunktionTω des bis hierhin entworfenen geschlossenen Regelkreises?
e) Berechnen Sie die Störübertragungsfunktion Gmω(s) = Ω(s)ML(s) vom Lastmoment mL
auf die Winkelgeschwindigkeit ω. Simulieren Sie die Störsprungantwort. Warum istdas Störverhalten des entworfenen Regelkreises nicht brauchbar? Was fällt Ihnen auf,wenn Sie die Pole von Tω und Gmω vergleichen?
f) Überlegen Sie mit Hilfe der Wurzelortskurve, wie die Nullstelle s0,ω des Reglers ver-schoben werden muss, um das Störverhalten zu verbessern. Wählen Sie s0,ω und kωneu, sodass alle vorher genannten Forderungen an das Führungsverhalten weiterhinerfüllt werden. Wie lauten die neue Führungsübertragungsfunktion Tω und die neueStörübertragungsfunktion Gmω und deren Pole?
3. Erweitern Sie Ihre Reglerstruktur in Scicos um eine Anti-Windup-Schaltung nach Ab-bildung 11. Führen Sie die Dierenz (u − uR) auf den Integrator sowohl des innerenals auch des äuÿeren Reglers zurück. Machen Sie sich mit dem Windup-Eekt durch Si-mulationen des geschlossenen Regelkreises vertraut. Provozieren Sie dazu den Eekt beiausgeschalteter Anti-Windup-Schaltung (γ = 0) durch einen Störsprung im Lastmoment,der genügend hoch ist, um die Stellgröÿe u in Sättigung zu bringen. Untersuchen Sie, wiedie aktivierte Anti-Windup-Schaltung (γ > 0) den Eekt unterdrückt.
1Unter Ausregelzeit wird die Zeit zwischen dem Auftreten eines Sollwertsprunges und dem Eintritt der Regel-
gröÿe in ein Intervall von ±2% Abweichung um den Sollwert, so dass die Regelgröÿe nach Eintritt in diesem
Intervall verbleibt, verstanden.
12

4.4 Versuchsdurchführung und Auswertung 1b
1. Ersetzen Sie in Ihrem vorbereiteten Scicos-Regelkreis den Block der Motor-Regelstreckedurch den auf dem Laborrechner zur Verfügung stehenden Block zu Ansteuerung derMotorhardware und erstellen Sie mit dem Betreuer das echtzeitfähige Programm zurMotoransteuerung.
2. Verwenden Sie für den äuÿeren Regler zunächst die Parameter aus Aufgabe 2f.
a) Nehmen Sie die Führungssprungantwort des Drehzahlregelkreises auf. Schalten Siedafür den Sollwert der Winkelgeschwindigkeit von 0 rad
s auf 150 rads . Nehmen Sie zu-
sätzlich die Gröÿen ri und iA des inneren Regelkreises auf. Beschreiben und disku-tieren Sie das Regelkreisverhalten! Vergleichen Sie das Ergebnis mit der Simulationdes Führungsverhaltens aus der Vorbereitungsaufgabe 2f!
b) Nehmen Sie die Störsprungantwort des Systems auf. Betreiben Sie den Motor beieiner Winkelgeschwindigkeit von 150 rad
s und lösen Sie die Rückhaltevorrichtung derBremse um ein sprunghaftes Lastmoment zu erhalten. Nehmen Sie zusätzlich dieGröÿen ri und iA des inneren Regelkreises auf. Beschreiben und diskutieren Sie dasRegelkreisverhalten! Vergleichen Sie das Ergebnis mit der Simulation des Störver-haltens aus der Vorbereitungsaufgabe 2f!
3. Untersuchen Sie nun den Regelkreis mit den zuerst bestimmten Parametern aus Aufgabe2d. Nehmen Sie die Störsprungantwort des Systems wie in Aufgabe 2b auf. Wie äuÿertsich das unbefriedigende Störverhalten in der Praxis? Vergleichen Sie das Ergebnis mitder Simulation des Störverhaltens aus der Vorbereitungsaufgabe 2e!
4. Testen Sie ihre Anti-Windup-Schaltung mit den Parametern aus Aufgabe 2f. BetreibenSie den Motor bei einer Winkelgeschwindigkeit von 150 rad
s und halten Sie die Scheibesehr kurz fest um sie danach sofort wieder freizugeben. Wiederholen Sie den Versuch mitdeaktivierter Anti-Windup-Schaltung! Nehmen Sie neben der Winkelgeschwindigkeit unddem Ankerstrom die Stellgröÿen vor und nach der Beschränkung auf. Beschreiben undvergleichen Sie das Regelkreisverhalten mit und ohne Anti-Windup-Schaltung!
5. Erweitern Sie das Scilab-Skript, das Sie für die Simulation geschrieben haben, um eineRoutine, die es ermöglicht, aus den gespeicherten Versuchsdaten aussagekräftige Plots zugenerieren. Binden Sie diese in Ihr Protokoll ein!
A Nützliche Scilab-Befehle
Diese kleine Hilfe erhebt keinen Anspruch auf Vollständigkeit. Bei Unsicherheiten sollte zudemimmer die Scilab-Hilfe herangezogen werden.
• Scilab-Hilfe zum Befehl X
help X
• Denition eines Polynoms über die Nullstellen (in Abwandlung über Koezienten)
poly
Beispiel
s=poly(0,'s');
13

• Denition eines linearen Systems aus den Matrizen des Zustandsraummodells (A,B,C)oder einer Transferfunktion
syslin
Beispiel
G=syslin('c',A,B,C);
G=syslin('c',1/(1+s));
• Zustandsraummodell in Transferfunktion umwandeln oder umgekehrt
ss2tf, tf2ss
• Komplexen Frequenzgang eines Systems bestimmen
repfreq
Beispiel (andere Aufrufmethoden siehe Scilab-Hilfe)
repf=repfreq(system,frequenzvektor)
• Amplitude in dB und Phase in aus dem komplexen Frequenzgang bestimmen
dbphi
Beispiel
[db,phi]=dbphi(repf)
Soll die Amplitude linear vorliegen, verwendet man
abs
• Simulation einer Sprungantwort
csim
Beispiel
t=0:0.01:10; //Zeitvektor
u=ones(t); //Vektor gleicher Elementzahl wie t, Elemente alle 1
y=csim(u,t,sys); //sys lineares System
//auch: y=csim('step',t,sys);
• Zeichnen von Wurzelortskurven
evans(system)
evans(system,maximaler_verstaerkungsfaktor)
Die Verstärkung eines Punktes auf der Wurzelortskurve gibt der folgende Befehl aus.
k=-1/real(horner(system,[1,%i]*locate(1)))
Der Punkt wird durch klicken auf die Wurzelortskurve ausgewählt.
• Ein Ergebnis von kleinen Koezienten säubern (Entstehung durch numerische Berech-nung)
clean
Hinweis: Es ist empfehlenswert, eigene Plotroutinen zu schreiben. Diese können als Scilab-Funktionen gespeichert und so immer wieder von ihnen verwendet werden. Weitere, tieferge-hende Beispiele und Hinweise nden sich in der Scilab-Einführung des Instituts, welche unterhttp://www.control.tu-berlin.de/Teaching:Scilab verfügbar ist.
14





























