Embed Size (px)
Citation preview

Kapitel 9
Vektorbündel immetastabilen Bereich
Inhalt des letzten Kapitels ist die Untersuchung stabil trivialer Bündel mit Methoden derstabilen Homotopietheorie. Während in den vorherigen Kapitel die Beziehung eines Vek-torbündels zur unterliegenden sphärischen Faserung die Hauptrolle spielte, geht es jetzthauptsächlich um die Übersetzung von instabilen Daten in stabile. Dies ist oft im metasta-bilen Dimensionsbereich, der direkt an den stabilen Bereich anschließt, möglich. Typischist zum Beispiel das Vorliegen einer exakten Sequenz in der jeweils zwei stabile Gruppeneine instabile umfassen und so einen Zugriff auf diese ermöglichen. Ausgangspunkt ist derSatz von Barratt-Mahowald, dessen Beweis in den letzten Kapiteln vorbereitet wurde undder nun zunächst zu Ende geführt werden soll. Dieser Satz beantwortet die Frage nach dermaximalen Bündelreduktion von stabilen Bündeln über Sphären, ist also das Analogon desVektorfeldsatzes, der ja dieses Problem für das Tangentialbündel der Sphäre löst. Er erlaubtim metastabilen Bereich eine Trennung von stabilen und instabilen Bündeln über Sphä-ren und nachfolgend eine vollständige Übersetzung der Gruppe STn−k(Sn) der (n − k)-dimensionalen stabil trivialen Bündeln über Sn in eine stabile Homotopiegruppe.
Haupthilfsmittel ist die Verwendung der bereits früher eingeführten Gauß-Abbildunggξ für ein stabil triviales Bündel ξ, denn metastabil liegen diese wegen des höheren Zu-sammenhangs der Stiefel-Mannigfaltigkeiten in stabilen Gruppen. So läßt sich beispiels-weise die Stabilisierungssequenz für Bündel über Sn auf stabil triviale Bündel einschränkenund metastabil in eine exakte Sequenz von stabilen Homotopiegruppen übersetzen. Diesist wichtig für die Untersuchung der Schnitthindernisabbildung p∗ aus der Stabilisierungs-sequenz
�→ [Sn−1 , SO(n − k − 1)]i⊕
�→ [Sn−1 , SO(n − k)]p∗
�→ [Sn−1 , Sn−k−1] �→ .
Nach Definition ordnet p ∶ SO(n − k) �→ Sn−k−1 einer Matrix die letzte Spalte zu, füreine Klebeabbildung cξ eines (n − k)-dimensionalen Bündels ξ über Sn ist dann die Klassep∗([cξ]), die wir auch als Homotopie-Euler-Klasse e′(ξ) = p∗([cξ]) interpretiert hatten,das vollständigeHindernis für einen nullstellenfreien Schnitt in ξ. DiemaximalenBündelre-duktionen von ω4k−1 ∈ SVektR(S4k), die sich aus dem Satz von Barratt-Mahowald ergeben,nennen wir auch kurz Barratt-Mahowald-Bündel. Wir berechnen die Homotopie-Euler-Klasse, also das Hindernis für einen weiteren Schnitt, eines solchen Bündels und verfolgenden Zusammenhangmit Homotopiegruppen von Sphären und der Nichtkommutativität in+VektnR(ΣX). Von den Homotopiegruppen der Sphären sind nur πk(Sk) und π4k−1(S2k)nicht endlich und enthalten jeweils eine unendlich zyklische Gruppe Z. In beiden Fällen
K. Knapp, Vektorbündel, DOI 10.1007/978-3-658-03114-5_9, © Springer Fachmedien Wiesbaden 2013
518 9 Vektorbündel im metastabilen Bereich
werdenVielfache der Erzeugenden dieser zyklischenUntergruppe durchHomotopie-Euler-Klassen von Bündeln gegeben. Für π4k−1(S2k) ist dies ein Barratt-Mahowald-Bündel undfür πk(Sk) das Tangentialbündel der Sphäre.
Ebenfalls auf der Verwendung von Gauß-Abbildungen beruht die nach James be-nannte Periodizität für die Gruppen der stabil trivialen Bündel STn−k(Sn), denn eineGauß-Abbildung gξ ∶ Sn → SO(n + 2)/SO(n − k) läßt sich über Pn++1(R)/Pn−k−1(R) ≅Pk+1(R)(n−k)λ faktorisieren und aus der Endlichkeit der Ordnung von [λk+1]s in
SVektR(Pk+1(R)) folgt, daß die stabilen Homotopietypen solcher Quotienten periodischsind, sodaß für festes k eine Periodizität in n resultiert.
In den beiden letzten Abschnitten wird das Vektorfeldproblem für Sphären und damitzusammenhängende Fragen behandelt.Wir untersuchen die Bündelreduktionen (τSn)⟨−k⟩
des Tangentialbündels der Sphäre, die man durch Abspalten von k orthogonalen Vektorfel-dern erhält, genauer, bestimmen deren Ordnung und beschreiben, wieder im metastabilenBereich, diejenigen Elemente in STn−k(Sn), die sich durch K-Theorie entdecken lassen unddie, wennman so will, die einfachsten instabilen Vektorbündel über Sn darstellen. Es ergibtsich nach der Bott- und der James-Periodizität noch ein weiteres Periodizitätsphänomen,das mit den schon betrachteten Periodizitätsoperatoren zusammenhängt. Genau wie beiden Barratt-Mahowald-Bündeln hat die Berechnung der Homotopie-Euler-Klasse der Bün-delreduktionen (τSn)⟨−k⟩ interessante Anwendungen. Eine ausführliche Einleitung für diebeiden letzten Abschnitte findet man dort.
In diesem Kapitel verwenden wir oft Ps als Abkürzung für Ps(R) und Pbk für den Quo-
tientenrraum Pb(R)/Pk−1(R), sowie Pk für P∞(R)/Pk−1(R). Außerdem unterscheiden wirbequemlichkeitshalber oft nicht zwischen einer Abbildung und ihrer Homotopieklasse, ins-besondere bei der Klebeabbildung α und ihrer Klasse [α] ∈ [X , SO(n)] für ein Bündel Eαüber ΣX .
9.1 Metastabile Homotopiegruppen von SO(n)Dieser Abschnitt enthält den Beweis des Satzes von Barratt-Mahowald und die Berechnungder Homotopie-Euler-Klasse eines Barratt-Mahowald-Bündels.
9.1.1 Der Satz von Barratt-Mahowald
Den stabilen Bereich für die n-dimensionalen Vektorbündel über der (k + 1)-Sphäre+VektnR(Sk+1) ≅ πk(SO(n)) erhält man durch die Stabilisierungssequenz. Dies ist der Di-mensionsbereichmit k ≤ n−2, hier gilt: πk(SO(n)) ≅ πk(SO) ≅ +SVektR(Sk+1). DieWerteder Gruppen ergeben sich dann mit der Bott-Periodizität aus den acht Anfangswerten:
πk(O) ≅ SVektR(Sk+1) =
⎧⎪⎪⎪⎨⎪⎪⎪⎩
Z k ≡ 3, 7 mod 8Z/2 k ≡ 0, 1 mod 80 sonst
.
Mit ωk bezeichnen wir wieder ein Erzeugendes in πk(SO), siehe (3.3.17).

9.1 Metastabile Homotopiegruppen von SO(n) 519
Der metastabile Bereich umfaßt die Gruppen
+VektnR(Sk+1) = πk(SO(n))
für k < 2n − 2. Hier hat man:
Satz 9.1.1. a) Für k < 2n − 2 und n ≥ 13 gilt
πk(SO(n)) ≅ πk(SO) ⊕ πk+1(SO/SO(n)) ≅ πk(SO) ⊕ πsk+1(Pn)
b) Für k > 4 liegt ω4k−1 im Bild von i∗ ∶ π4k−1 (SO(2k + 1)) → π4k−1(SO) .c) Für i > 1 liegt ω j , j = 8i , 8i + 1, im Bild von i∗ ∶ π j(SO(6)) → π j(SO).
Dieser Satz stammt von Barratt und Mahowald [BaM63], [DaM89], die Teile b) undc) wurden bereits in (3.3.23) angesprochen. Auf die Fälle n ≤ 13 gehen wir außer in einemBeispiel nicht weiter ein, sie werden jedoch in [DaM89] ausführlich behandelt.
Da π4k−1(SO(n)) für n < 2k + 1 endlich ist (3.3.27), ist das Ergebnis, daß i∗ ∶π4k−1(SO(2k + 1) → π4k−1(SO) surjektiv ist (k > 4), nicht weiter zu verbessern und läßtsich unter Verwendung von (2.1.22) wie folgt interpretieren:
Korollar 9.1.2. Für k > 4 ist ein nichttriviales stabiles reelles Vektorbündel über S4kisomorph zurWhitney-Summe eines unzerlegbaren (2k+1)- dimensionalen Bündels undeines Produktbündels.
Bemerkungen.
1. Es sei ω′4k−1 ein Urbild von ω4k−1 in π4k−1(SO(2k + 1)). Jedes Bündel Eα , dessen Klebe-abbildung α die Homotopieklasse ω′4k−1 repräsentiert, nennen wir Barratt-Mahowald-Bündel.
2. Ebenfalls aus der Endlichkeit von π4k−1(SO(2k)) folgt, daß ein Barratt-Mahowald-Bündel Eα keinen weiteren nullstellenfreien Schnitt mehr zuläßt und damit das Schnit-thindernis, nämlich die Homotopie-Euler-Klasse e′(Eα) ∈ π4k−1(S2k) in der Stabilisie-rungssequenz zu SO(2k) → SO(2k+1), nichttrivial und sogar ein Element unendlicherOrdnung sein muß. Hierauf gehen wir am Ende des Abschnitts näher ein.
3. Teil a) von (9.1.1) läßt sich dahingehend interpretieren, daß sich immetastabilen Bereichauf einer Sphäre instabile und stabile Vektorbündel sich nicht weiter mischen. Dies istfür andere Räume, etwa ΣPn(R), nicht der Fall.
4. Die instabilen Bündel in πk(SO(n)) werden hier durch ihre Gauss-Abbildungen inπk+1(SO/SO(n)) ≅ πk+1(Vn(R
2n)) gegeben. Diese Beschreibung ist in diesem Falleindeutig, siehe Abschnitt 9.2.1 oder 6.2.3.

520 9 Vektorbündel im metastabilen Bereich
DieHerleitung von (9.1.1) geht aus von der allgemeinen Stabilisierungssequenz für Sphä-ren (6.2.3), das ist hier einfach die lange exakte Homotopiesequenz des Faserbündels (6.2.4)
SO(n) �→ SO(n +m) �→ SO(n +m)/SO(n) = Vm(Rn+m)
für m genügend groß, für das wir vereinfachend
SO(n) �→ SOp�→ SO/SO(n)
schreiben werden. In dieser exakten Sequenz
→ πk+1(SO)p∗
→ πk+1(SO/SO(n))∂→ πk(SO(n))
i∗
→ πk(SO)p∗
→ πk(SO/SO(n)) →(9.1.3)
ist πk(SO) ≅ +SVektR(Sk+1) bereits stabil und für πk+1(SO/SO(n)) gilt dies im metasta-bilen Bereich. Die Frage, für welches n das Erzeugende ωk ∈ πk(SO) im Bild von i∗ liegt,wird durch den Nachweis, daß die zugehörige Hindernisklasse p∗(ωk) in πk(SO/SO(n))verschwindet, beantwortet. Die Dimensionen im Teil c) liegen außerhalb des metastabilenBereichs und die Urbilder von ωj müssen explizit konstruiert werden.Wir zeigen zunächst,wie Teil a) aus Teil b) folgt (für k > 15).
Unter Verwendung der Beziehungen ω8m = η∗(ω8m−1), ω8m+1 = η∗(ω8m) folgt mitHilfe des kommutativen Diagramms
→ π8m−1(SO(4m + 1)) �→ π8m−1(SO)p∗
�→ π8m−1(SO/SO(4m + 1)) →↓ η∗ ↓ η∗
→ π8m(SO(4m + 1)) �→ π8m(SO)p∗
�→
↓ η∗ ↓ η∗
→ π8m+1(SO(4m + 1)) �→ π8m+1(SO)p∗
�→
das Verschwinden der Hindernisklassen p∗(ω8m) und p∗(ω8m+1) aus der Voraussetzungp∗(ω4m−1) = 0. Damit erhält man aus (9.1.3) die kurzen exakten Sequenzen (für j = 0, 1)
0�→ π4m(SO/SO(2m + 1))∂→ π4m−1(SO(2m + 1))
i∗
→ π4m−1(SO) �→ 0
0�→ π8m+1+ j(SO/SO(4m + 1))∂→ π8m+ j(SO(4m + 1))
i∗
→ π8m+ j(SO) �→ 0. (9.1.4)
Für ein n mit 15 < k < 2n − 2 ist dann
0�→ πk+1(SO/SO(n))∂→ πk(SO(n))
i∗
→ πk(SO) �→ 0 (9.1.5)
immer kurz exakt. Dies gilt trivialerweise in denDimensionen, in denen πk(SO) verschwin-det, oder folgt, da man eine der Sequenzen aus (9.1.4) hierüber faktorisieren kann. Außer-dem spaltet diese Sequenz, diesmal trivialerweise für k = 4m − 1. Für k = 8m, 8m + 1wählt man ein Urbild ω′8k−1 ∈ π8m−1(SO(4m + 1)) von ω8k−1 , dann sind η∗(ω′8k−1) undη∗ ○ η∗(ω′8k−1) Urbilder der Ordnung 2 für ω8k bzw. ω8k+1 , sodaß auch hier die Sequenzspaltet.

9.1 Metastabile Homotopiegruppen von SO(n) 521
Die Gruppen πi(SO/SO(n)) sind für i ≤ 2n − 2 stabil, man kann sie wie folgt durchstabile Homotopiegruppen ersetzen: In
πsi(Pn)
σ∞
←� πi(Pn)R∗
→ πi(SO/SO(n)) (9.1.6)
ist die Einhängungsabbildung σ∞ für i ≤ 2n−2 bijektiv und der von der reellen Spiegelungs-abbildung induzierte Homomorphismus R∗ für i ≤ 2n − 1 bijektiv (siehe (6.2.18)). Damithat man für k < 2n − 2
πk+1(SO/SO(n)) ≅ πsk+1(Pn) (9.1.7)
und Teil a) ist aus b) hergeleitet.
Beispiele (im metastabilen Bereich, aber mit k ≤ 15).
1. Im kommutativen Diagramm
Z ≅ π7(SO(7)) �→ π7(SO)p∗
�→ π7(SO/SO(7)) ≅ πs7(P7)
↑ ∥ ↑ ↑
π7(SO(6)) �→ π7(SO)p∗
�→ π7(SO/SO(6)) ≅ πs7(P6)
↑ ∥ ↑ ↑
π7(SO(5)) �→ π7(SO)p∗
�→ π7(SO/SO(5)) ≅ πs7(P5)
(9.1.8)
ist für ω7 = [λO1 ]s wegen der Nichttrivialität der achten Stiefel-Whitney-Klasse w8(λO1 )das Liftungshindernis p∗(ω7) in π7(SO/SO(7)) vonNull verschieden, wegen derKom-mutativität des Diagramms gilt dies dann auch für p∗(ω7) in π7(SO/SO(5)), weil esauf das Erstgenannte abbildet. Es ist πs
7(P7) ≅ Z/2, πs7(P5) ≅ Z/8 (die Berechnung
solcher Gruppen wird später im Beispiel (9.3.4) erläutert), deshalb hat 2 ⋅ ω7 eine 7 di-mensionale, 4 ⋅ω7 eine 6 dimensionale und 8 ⋅ω7 eine 5 dimensionale Bündelreduktion.Dies folgt auch aus dem allgemeinen Zusammenhang zwischen Verdoppeln eines Bün-dels und seinen Schnitteigenschaften (5.1.11), die Kenntnis der Hindernisklassen zeigthier, daß jeweils nicht mehr Schnitte möglich sind.
2. Als Beispiel für Teil c) betrachten wir die Stabilisierungssequenz zu SO(6) → SO
π9(SO)p∗
�→ π9(SO/SO(6)) → π8(SO(6)) → π8(SO)p∗
�→ π8(SO/SO(6))∥ ∥ ∥ ∥ ∥
Z/2 0�→ Z/12 → Z/24 → Z/2 → 0
Es ist π8(SO/SO(6)) ≅ πs8(P6) = 0 und π9(SO/SO(6)) ≅ πs
9(P6) = Z/2. Wegen(3.3.31)
π8(SO(6)) = π8(SU(4)) = π8(U(4)) ≅ Z/4!
hat ω8 ein Urbild ω′8 der Ordnung 8 in π8(SO(6)).
Im Beweis von Teil c) lassen sich wegen der Endlichkeit von π8m(SO) direkt Periodizi-tätsoperatoren einsetzen und wir können ähnlich wie in (7.3.12) vorgehen. Es sei wieder
M(n) = Sn ∪8 en+1 ≡ Σn−1M(1)

522 9 Vektorbündel im metastabilen Bereich
ein mod-8-Moore-Raum und B3 ∶ Σ8M(1) → M(1) der in (7.3.8) eingeführte Adams-Periodizitätsoperator. Aus der stabilen Abbildung B3 ∈ {Σ8M(1) ,M(1)} erhält man durchAushängung Repräsentanten B(n) ∶ Σ8M(n) → M(n) durch echte Abbildungen. Mit demFreudenthalschen Einhängungssatz (6.1.4) erhält man direkt B(n) für n ≥ 11. Nur dieKonstruktion des benötigten Operators B(8) macht etwas mehr Arbeit, diese ist aber in([CaC06]) ausführlich dargestellt.
Mit Hilfe von B(n) wird ein Urbild ω′8m von ω8m in π8m(SO(6)) wie folgt konstruiert.Das Urbild ω
′
8 von ω8 in π8(SO(6)) hat, wie im letzten Beispiel erläutert, die Ordnung8 und liftet daher zu einer Abbildung w′′8 ∶ M(8) → SO(6). Durch Vorschalten von ge-eigneten Einhängungen der Adams-Abbildung B(n) und der Inklusion i erhält man dieAbbildung
ω′8m ∶ S8mi→ M(8m) B
(8m−8)
→ M(8m−8) B(8(m−2))
→ M(8m−16) →⋯M(8)w′′8→ SO(6) (9.1.9)
die, wie eine einfache Diagrammjagt in dem kommutativen Diagramm
[S8 , SO(6)] [S8m , SO(6)]
[M(8) , SO(6)] [M(16) , SO(6)] ⋯ [M(8m) , SO(6)]
[M(8) , SO] [M(16) , SO] ⋯ [M(8m) , SO]
[S8 , SO] [S16 , SO] ⋯ [S8m , SO]
i∗
��B(8)∗
��
��
��
��
i∗
��
��B(8)∗
≅
��
i∗
��
��
i∗
��
��
i∗
��βR
≅
�� ��
zeigt, zu ω8m in π8m(SO) stabilisiert.
Zum Beweis von Teil b):Die Aussage von Teil b) ist, wie bereits mehrfach angesprochen, äquivalent zu:
Satz 9.1.10. Die Hindernisabbildung
p∗ ∶ π4k−1(SO) �→ π4k−1(SO/SO(2k + 1))
ist für k > 4 die Nullabbildung.
EinVorgehenwie imTeil c) ist hier zunächst nichtmöglich, daω4k−1 nicht von endlicherOrdnung ist. Die Beweismethode aus [BaM63], ausführlicher in [DaM89], ist grobwie folgt.Zu α ∈ π4i−1(SO) betrachtet man die Komposition
S4i−1 α→ SO
p�→ SO/SO(2i + 1)

9.1 Metastabile Homotopiegruppen von SO(n) 523
und das entsprechende Element α ∶= σ∞ ○(R∗)−1[p○α] in πs
4i−1(P2i+1). In der klassischenmod-2-Adams-Spektralsequenz für πs
∗(P2i+1) gibt es eine Verschwindungslinie, die die
Adams-Filtrierung von nichttrivialen Elementen im E∞-Term der Spektralsequenz nachoben begrenzt. Elemente von zu großer Adams-Filtrierung sind also automatisch trivial.Man kann nun die Adams-Filtrierung von α und damit die von α recht gut abschätzen. Esstellt sich heraus, daß diese, von niedrig dimensionalen Ausnahmen abgesehen, stärker alsdiese Verschwindungslinie ansteigt, sodaß man α = 0 folgern kann.
Unser Argument vermeidet die Adams-Spektralsequenz Technik, ist leichter auf andereBasisräume übertragbar, setzt dafür aber die Adams-Vermutung ein. Es wurde am Beispielω8k+3 in (7.3.12) bereits erläutert und läßt sich wie folgt skizzieren. Zunächst übersetzt mandas Bündelreduktionsproblem in ein Aushängungsproblem für die stabile Abbildung, diedie Klebeabbildung des Bündels unter dem J-Homomorphismus liefert. Dies wurde im letz-ten Abschnitt durchgeführt (8.4.4). Dem dort hergeleiteten Diagramm
+Vekt2k+1R (S4k)i⊕
�→ +SVektR(S4k)p∗
�→ [S4k−1 , SO/SO(2k + 1)]↓ J ↓ J ≅ ↓ θ
[S6k , S2k+1] σ∞
�→ π0s (S4k−1)
H(2k)�→ πs
4k−1(P∞(R)2kλ)
entnimmt man, daß das Hindernis zur Bündelreduktion von ω4k−1, nämlich p∗(ω4k−1),verschwindet, wenn sich J(ω4k−1) genügend weit aushängen läßt.
Für die Bild(J)-Elemente auf Sphären, d. h. für Elemente aus J(πk(SO)) ⊂ πsk(S
0) sinddie Ursprungssphären bekannt. Sie wurden als erstes von Mahowald bestimmt. ([Mah73],[Mah82], [DMa89]). Eine kleine Rechnung mit den in [DMa89] angegebenenWerten zeigtdann, daß die Bild(J)-Elemente in πs
k+1(S0) - bis auf niedrig dimensionale Ausnahmen -
weit genug aushängen lassen, sodaß man hieraus p∗(ω4k−1) = 0 erhalten kann.Nun ist die Bestimmung der Ursprungssphäre für Elemente aus J(πk(SO)) mit den
Methoden aus [DMa89] nicht unbedingt einfacher als das ursprüngliche Argument für(9.1.1), trotzdem hat dieser Ansatz, über den J-Homomorphismus zu gehen, Vorteile. ImGegensatz zu den Bündeln aus [X , SO] sind für einen endlichen Komplex X die zugehöri-gen Bild(J)-Elemente in π0
s (X) immer von endlicher Ordnung und zur Konstruktion vonAushängungen lassen sich Periodizitätsabbildungen - ähnlich wie in (9.1.9) - einsetzen. MitanderenWorten, das Aushängungsproblem für Bild(J)-Klassen scheint flexibler zu sein alsdas ursprüngliche Bündelreduktionsproblem.
Neben der Aushängungsmethode aus [DMa89] gibt es - zumindest in einem bestimm-ten Dimensionsbereich - eine von M. Crabb stammende, oben besprochene, rein K-theoretische Methode, Aushängungen für Bild(J)-Elemente zu konstruieren. Dabei wirdstatt den in [DMa89] verwendeten bo-Auflösungen und Spektralsequenzargumenten wie-der die Lösung der Adams-Vermutung eingesetzt. Dies ist derWeg, der hier vorgestellt wur-de.
Einen Beweis von (9.1.10) und damit von (9.1.1) erhält man jetzt aus dem letzten Dia-gramm (8.4.4) und (7.3.15).
Beide Beweisstrategien beleuchten verschiedene Aspekte des Bündelreduktiospro-blems. Die Methode aus [BaM63] stützt sich darauf, daß die Bott-Periodizität die Adams-Filtrierung einer Abbildung erhöht und verallgemeinert damit den Ansatz aus (4.5.11), die

524 9 Vektorbündel im metastabilen Bereich
andere Methode greift darauf zurück, daß der J-Homomorphismus die Klebeabbildungeines Bündels vereinfacht.
9.1.2 Die Homotopie-Euler-Klasse eines Barratt-Mahowald-Bündelsund das Samelson Produkt ⟨cτS2k , cτS2k ⟩
Das stabile Erzeugende ω4k−1 ∈ π4k−1(SO) ≅ SVektR(S4k) ≅ Z hat nach (9.1.10) eine(2k + 1)-dimensionale Bündelreduktion Eα mit Klebeabbildung [α] ∈ π4k−1(SO(2k + 1)),die wir Barratt-Mahowald-Bündel genannt haben. Da π4k−1(SO(2k)) endlich ist, kann einsolches Bündel keinen nullstellenfreien Schnitt besitzen und seineHomotopie-Euler-Klassee′(Eα) = p∗([α]) ∈ π4k−1(S2k) ≅ Z ⊕ tor muß nach der Stabilisierungssequenz von un-endlicher Ordnung sein. Für k ≠ 1, 2, 4 erzeugt das Whitehead-Produkt W ∶= [i2k , i2k]die Gruppe π4k−1(S2k)/tor ≅ Z. Ziel dieses Abschnitts ist die Herleitung des folgendenResultats aus [Mah65]:
Satz 9.1.11. Für eine (2k + 1)-dimensionale Bündelreduktion Eα mit Klebeabbildung[α] ∈ π4k−1(SO(2k + 1)) des Erzeugenden ω4k−1 ∈ π4k−1(SO) gilt für k ≠ 1, 2, 4 :a) Seine Homotopie-Euler-Klasse e′(Eα) ∈ π4k−1(S2k) ist gegeben durch
e′(Eα) = p∗([α]) = λ2k ⋅ [i2k , i2k] + t
mit einem Element t endlicher Ordnung und den Zahlen
λ2k = ak8 (2k − 1)! mit ak = {
1 für k = 0mod 22 für k = 1mod 2
b) Es gibt eine Wahl für α mit e′(Eα) = λ2k ⋅ [i2k , i2k], d.h. mit t = 0.
Eine Bündelreduktion von ω4k−1 mit t = 0 ist bis auf die Addition eines stabil trivia-len 2k-dimensionalen Bündels über S4k festgelegt. Explizite Konstruktionen oder weitereFestlegungen für Barratt-Mahowald-Bündel scheinen nicht bekannt zu sein. Mit den gege-benen Dimensionen befindet man sich genau eine Dimension außerhalb des metastabilenBereichs.
Wir zeigen zunächst b): Dazu betrachten wir folgendes kommutative Diagramm. DieZeilen sind Paarsequenzen und deshalb exakt, die Abbildungen wurden in Abschnitt 8.4

9.1 Metastabile Homotopiegruppen von SO(n) 525
eingeführt.
π4k(SO , SO(2k + 1))∂1�→ π4k−1(SO(2k + 1))
i∞∗
�→ π4k−1(SO)∥ ↓ j
∗
↓ j∞∗
π4k(SO , SO(2k + 1))∂2�→ π4k−1(SO(2k + 1), SO(2k)) �→ π4k−1(SO , SO(2k))
↓ J∞F∗ ↓ JF∗ ↓ JF∗
π4k(SF , SF(2k + 1))∂3�→ π4k−1(SF(2k + 1), SF(2k))
i∞SF∗�→ π4k−1(SF , SF(2k))
∥ ↑ jSF∗ ↑ j∞SF∗π4k(SF , SF(2k + 1)) �→ π4k−1(SF(2k + 1)) �→ π4k−1(SF)
(9.1.12)Die Gruppe π4k−1(SO(2k + 1), SO(2k)) können wir mit π4k−1(S2k) identifizieren
(8.4.9), aus der Abbildung j∗ ∶ π4k−1(SO(2k + 1)) �→ π4k−1(SO(2k + 1), SO(2k)) wirddabei die Schnitthindernisabbildung p∗ ∶ π4k−1(SO(2k + 1)) �→ π4k−1(S2k) aus der Sta-bilisierungssequenz. Zwei wichtige Aussagen gehen bei der Wahl von α entscheidend ein,nämlich:
1. Die Abbildung JF∗ ∶ π4k−1(SO(2k + 1), SO(2k)) �→ π4k−1(SF(2k + 1), SF(2k)) istnoch surjektiv und ihr Kern besteht nach (8.4.16) gerade aus Vielfachen desWhitehead-ProduktsW = [i2k , i2k] ∈ π4k−1(S2k).
2. Die dem Vektorbündel zu ω4k−1 unterliegende sphärische Faserung JF∗(ω4k−1) ∈
π4k−1(SF) liegt im Bild von π4k−1(SF(2k)) �→ π4k−1(SF), hat also einen höherdi-mensionalen trivialen Summanden als ω4k−1 selbst.
Das letzte ist eine Folgerung aus dem Aushängungsresultat (7.3.15). In dem kommutati-ven Diagramm
π4k−1(SF(2k))iSF∗�→ π4k−1(SF)
≅ ↓ Θ∗ ≅ ↓ Θ∗
π6k−1(S2k)E∞�→ πs
4k−1(S0)
wird aus Θ∗ ○ JF∗(ω4k−1) das Bild(J)-Erzeugende J(ω4k−1) und (7.3.15) liefert die benötig-te Aushängung von J(ω4k−1). Weil also JF∗(ω4k−1) von SF(2k) herkommt, folgt mit derPaarsequenz zu (SF , SF(2k)) das Verschwinden der Hindernisklasse j∞SF∗(JF∗(ω4k−1)) inπ4k−1(SF , SF(2k)) und aus dem kommutativen Quadrat
π4k−1(SO)j∞∗
�→ π4k−1(SO , SO(2k))↓ JF∗ ↓ JF∗
π4k−1(SF)j∞SF∗�→ π4k−1(SF , SF(2k))
erhalten wirJF∗ ○ j∞∗(ω4k−1)) = 0 in π4k−1(SF , SF(2k)) (9.1.13)
Der Rest des Arguments ist nun eine einfache Diagrammjagd. Dazu sei ω1 ∈
π4k−1(SO(2k + 1)) eine beliebige Bündelreduktion von ω4k−1 ∈ π4k−1(SO). Dann schreibt

526 9 Vektorbündel im metastabilen Bereich
sich j∗(ω1) in π4k−1(SO(2k + 1), SO(2k)) ≅ π4k−1(S2k) als j∗(ω1) = λ ⋅ W + t mitt ∈ tor(π4k−1(S2k)) und λ ∈ Z (für k ≠ 1, 2, 4). Wir betrachten jetzt z ∶= JF∗ ○ j∗(ω1)
in π4k−1(SF(2k + 1), SF(2k)) und berechnen i∞SF∗(z) in π4k−1(SF , SF(2k)). Mit demmittleren rechten kommutativen Quadrat aus (9.1.12) und (9.1.13) folgt
i∞SF∗(z) = i∞SF∗ ○ JF∗ ○ j∗(ω1) = JF∗ ○ j∞∗○ i∞∗(ω1) = JF∗ ○ j∞
∗(ω4k−1)) = 0.
Wir können also ein t1 ∈ π4k(SF , SF(2k + 1)) mit ∂3(t1) = z wählen. Nach (8.4.14) istJ∞F∗ ∶ π4k(SO , SO(2k + 1)) �→ π4k(SF , SF(2k + 1)) surjektiv, sodaß t1 ein Urbild t2 unterJ∞F∗ in π4k(SO , SO(2k + 1)) besitzt. Wir ändern jetzt ω1 um ∂1(t2) ab, d.h. betrachten
α ∶= ω1 − ∂1(t2).
Dann ist α eine Bündelreduktion von ω4k−1 mit p∗(α) ∈ Z ⋅W , denn es ist
j∗(α) = j∗(ω1) − j∗ ○ ∂1(t2) = j∗(ω1) − ∂2(t2) und JF∗ ○ j∗(α) = z − ∂3(t1) = 0
Mit der Aussage 1) oben folgt jetzt die Behauptung j∗(α) ∈ Ker(JF∗) ⊂ Z ⋅W .
Die Herleitung von a), also die Bestimmung der Zahl λ = λ2k , ist eine schöne Anwen-dung von charakteristischenKlassen.Dazu untersuchenwir das SphärenbündelY ∶= S(Eα)
einer beliebigen (2k + 1)-dimensionalen Bündelreduktion Eα von ω4k−1 mit j∗([α]) =λ ⋅W + t ( = e′(Eα) = p∗([α]) in π4k−1(SO(2k + 1), SO(2k)) ≅ π4k−1(S2k)) noch et-was genauer:
S2k i2�→ Y
p2�→ S4k .
Der Totalraum Y hat eine Zellenzerlegung der Form
Y ≅ S2k ∪β e4k ∪ e6k .
Wir benötigen die Abbildung β ∶
Lemma 9.1.14. Die anheftende Abbildung β der 4k-Zelle in Y ist durch [β] = e′(Eα) =
p∗(α) ∈ π4k−1(S2k) gegeben.
Beweis. Es sei fα ∶ S4k �→ BSO(4k) die klassifizierende Abbildung von Eα und
fα ∶ Y = S(Eα) �→ S(γ2k+1) ≃ BSO(2k) (9.1.15)
die über fα liegende Abbildung zwischen S(Eα) und dem Sphärenbündel des universellenBündels. Damit hat man ein kommutatives Diagramm von exakten Sequenzen
π4k(BSO(2k)) �→ π4k(BSO(2k + 1))∂�→ π4k−1(S2k)
↑ f α∗ ↑ f α∗ ∥
π4k(Y)p2∗�→ π4k(S4k)
∂2�→ π4k−1(S2k)
i2∗�→ π4k−1(Y)

9.1 Metastabile Homotopiegruppen von SO(n) 527
woraus sofort ∂2([1S4k ]) = ∂([ fα]) = p∗(α) folgt. Es sei β ein Repräsentant von ∂2([1S4k ]).Dann gilt i2 ○ β ≃ 0, denn die untere Zeile im letzten Diagramm ist exakt. Eine Nullhomo-topie von i2 ○ β - bildseitig auf das 4k-Skelett Y 4k eingeschränkt - liefert eine Abbildung βund ein kommutatives Diagramm
S2k ↪ S2k ∪β e4k �→ S4k∥ ↓ β ↓ β
S2k i2�→ Y 4k �→ Y 4k/S2k
(9.1.16)
Nach Konstruktion von β ist die induzierte Abbildung β ein Homöomorphismus. Dies giltdann auch für β und β kann als anheftendeAbbildung der 4k-Zelle genommenwerden.
Aus diesem Lemma ergibt sich die Ringstruktur vonH∗(Y ;Z). Es seien u2k , u4k Erzeu-gende von H∗(Y ;Z) in den Dimensionen 2k und 4k. Dann gilt
u2k ∪ u2k = H0(β) ⋅ u4k = 2 ⋅ λ ⋅ u4k (9.1.17)
in H4k(Cβ ;Z) ≅ H4k(Y 4k ;Z) ≅ H4k(Y ;Z). Hierbei ist β wie oben ein Repräsentant vonp∗(α) = λ ⋅W + t undH0 die klassische Hopf-Invariante. Die Gleichung folgt aus der Steen-rod Beschreibung vonH0 als funktionale Kohomologieoperation über das Cup-Produkt inder Kohomologie der Kofaser von β (wie im Abschnitt über die Hopf-Invariante erläutert),den Werten H0(W) = 2 ∈ Z, H0(t) = 0 und der Additivität von H0.
Zieht man ein Bündel auf sein Sphärenbündel zurück, so hat man immer einen kano-nischen nullstellenfreien Schnitt und man kann ein triviales Linienbündel abspalten. Wirkönnen also schreiben: p2∗(Eα) ≅ Eα ⊕R. Führt man diese Überlegung für das universelleBündel γ2k+1 durch und identifiziert S(γ2k+1) wie im Abschnitt über die Stabilisierungsse-quenz II mit BSO(2k), so erhält man die rechte Seite im kommutativen Diagramm (mitden Abbildungen aus dem letzten Beweis)
Eα �→ E(γ2k)↓ ↓
Yfα�→ BSO(2k)
↓ p2 ↓ i
S4kfα�→ BSO(2k + 1)
.
Dieses Diagramm zeigt, daß die ursprünglich als eine über fα liegende Abbildung zwischenden Spärenbündeln Y = S(Eα) �→ S(γ2k+1) ≃ BSO(2k) definierte Abbildung fα dasBündel Eα klassifiziert.
Wir berechnen jetzt Euler- und Pontrjagin-Klasse des Bündels Eα . Die gewöhnlicheEuler-Klasse e(Eα) ist ein Vielfaches des Erzeugenden u2k , etwa e(Eα) = a ⋅ u2k . Im kom-mutativen Diagramm
S2k k�→ BSO(2k) �→ BSO(2k + 1)
∥ ↑ f α ↑ f α
S2k i2�→ Y
p2�→ S4k

528 9 Vektorbündel im metastabilen Bereich
ist k, wie wir wissen, die klassifizierende Abbildung des Tangentialbündels der Sphäre S2k .Es folgt
a ⋅ u2k = i∗2 (e(Eα)) = i∗2 ○ f ∗α (e(γ2k)) = k∗(e(γ2k)) = e(τS2k) = 2 ⋅ u2k
und damit a = 2.Da stabil äquivalente Bündel wie Eα , p∗2(Eα) und p∗2(ω4k−1) gleiche Pontrjagin-Klassen
haben und die k-te Pontrjagin-Klasse von ω4k−1 nach dem Teilbarkeitssatz für Chern-Klassen (4.5.9) und der Wirkung des Komplexifizierens (4.4.15) genau durch ak ⋅ (2k − 1)!teilbar ist, hat man
pk(Eα) = p∗2(pk(Eα)) = p∗2(pk(ω4k−1)) = ak ⋅ (2k − 1)! ⋅ u4k .
Für ein 2k-dimensionales orientiertes Vektorbündel gilt pk(Eα) = e(Eα)2 . Setzt man die
beiden letzten Gleichungen ein, erhält man ak ⋅ (2k − 1)! ⋅ u4k = (2 ⋅ u2k)2 . Aus u2k ∪ u2k =2 ⋅ λ ⋅ u4k (9.1.17) erhält man schließlich den Wert von λ als
λ = λ2k = ak ⋅ (2k − 1)!/8,
wie behauptet.
Das Samelson-Produkt
⟨, ⟩ ∶ [A,H] × [B,H] �→ [A∧ B,H]
für einen Schleifenraum oder eine topologische Gruppe H ist der über p ∶ A× B �→ A∧ Bzurückgezogene Kommutator zweier Abbildungen, siehe (3.5.18) und Abschnitt 8.5. Des-halb ist die Gruppe [A × B,H] nicht abelsch, sobald ein Samelson-Produkt in [A ∧ B,H]nichttrivial ist. Das Samelson-Produkt für H = SO(n) hängt mit demWhitehead-Produktfür BSO(n) wie folgt zusammen: Aus Abschnitt 3.4, 3.4.5 haben wir das kommutative Dia-gramm
[ΣX , Sn]△
�→ [X , SO(n)]↘ k∗ ↑ ∂
[ΣX , BSO(n)].
Hier ist △ der Randoperator in der Fasersequenz zu SO(n) → SO(n + 1) → Sn , kdie klassifizierende Abbildung von τSn und ∂ der Randoperator des universellen SO(n)-Prinzipalbündels, unter dem die klassifizierende Abbildung f eines Bündels E f auf seineKlebeabbildung c f abgebildet wird.
Proposition 9.1.18. Sind f , g klassifizierende Abbildungen von Bündeln E f , Eg überΣA, ΣB mit Klebeabbildungen c f , cg , so gilt in [A∧ B, SO(n)] ∶
∂[ f , g] = ± ⟨c f , cg⟩ .

9.1 Metastabile Homotopiegruppen von SO(n) 529
Beweis. Zunächst stimmen die für SO(n) und ΩBSO(n) definierten Samelson-Produkteüberein (3.4.32). In Abschnitt 8.5 wird nachgerechnet, daß für Abbildungen α ∶ ΣA →
Z , β ∶ ΣB → Z mit Adjungierten α ∶ A → ΩZ , β ∶ B → ΩZ das Samelson-Produkt⟨α, β⟩ adjungiert zu ±[α, β] ist. Der Übergang von [α, β] zu ⟨α, β⟩ unter [ΣX , BSO(n)] ≅[X , ΩBSO(n)] ≅ [X , SO(n)] wird aber gerade durch den Randoperator ∂ beschrieben(3.4, 3.4.5).
Korollar 9.1.19. Der Randoperator △ ∶ π4k−1(S2k) �→ π4k−2(SO(2k)) bildet dasWhitehead-Produkt [i2k , i2k] auf das Samelson-Produkt ±⟨cτS2k , cτS2k ⟩ der Klebeabbil-dungen des Tangentialbündels τS2k ab.
Beweis. Mit obigem Diagramm folgt:
△([i2k , i2k]) = ∂ ○ k∗([i2k , i2k]) = ∂([k, k]) = ± ⟨cτS2k , cτS2k ⟩ .
und mit (9.1.11):
Korollar 9.1.20. Das Samelson-Produkt ⟨cτS2k , cτS2k ⟩ ∈ π4k−2(SO(2k)) hat für k ≠1, 2, 4 die Ordnung λ2k = ak ⋅ (2k − 1)!/8.
Beweis. Ein kleineres Vielfaches des Whitehead-Produkts W als λ2k ⋅W im Bild von p∗würde einWiderspruch zur Berechnung der Pontrjagin-Klasse von ω4k−1 nach sich ziehen.
Wir hatten oben bereits angemerkt, daß +Vekt2kR (Σ(X × Y)) nicht abelsch sein kann,wenn ein Samelson-Produkt in +Vekt2kR (Σ(X ∧ Y)) nichttrivial ist. Aus ⟨cτS2k , cτS2k ⟩ ≠ 0folgt dann:
Korollar 9.1.21. +Vekt2kR (Σ(S2k−1 × S2k−1)) ist für k ≠ 1, 2, 4 nicht abelsch.
Bemerkungen.
1. λ6 = 2 ⋅ 3 ⋅ 5, λ10 = 25 ⋅ (2b + 1), λ12 = 25 ⋅ (2c + 1).
2. Die Bündel C2k mit Klebeabbildung ⟨cτS2k , cτS2k ⟩ liefern Beispiele von Bündeln belie-big großer (endlicher) Ordnung in +Vekt2kR (ΣS4k−2), die nach Addition eines trivialenLinienbündels trivial werden.
3. Aus der Stabilisierungssequenz erhalten wir die Darstellung [i2k , i2k]∗(τS2k) für dasBündel C2k . In diesem Beispiel sind sowohl die induzierende Abbildung wie auch dasBündel selbst stabil trivial.

530 9 Vektorbündel im metastabilen Bereich
9.2 Schnitthindernisse und stabil triviale Bündel
9.2.1 Stabil triviale Bündel
Die allgemeine Stabilisierungssequenz (6.2.1)
→ +VektnR(ΣX) → +Vektn+mR (ΣX)
p∗
→ [X ,Vm(Rn+m)]
j∗
→ +VektnR(X) → +Vektn+mR (X)
erlaubt es, für einen endlichen Komplex X die n-dimensionalen Vektorbündel über X di-rekt mit stabilen Vektorbündeln in Beziehung zu setzen, denn für genügend großes m gilt+Vektn+mR (X) ≅ +SVektR(X). Im metastabilen Bereich dimX ≤ 2n − 2 ist die iterierte Ein-hängung σ∞ ∶ [X ,Vm(R
n+n)] �→ {X ,Vm(Rn+n)} bijektiv und man hat die Menge der
instabilen Bündel +VektnR(X) zwischen stabile Gruppen eingeschlossen. Die stabilen Grup-pen sind leichter zugänglich und erlauben so Aussagen über +VektnR(X) abzuleiten. DieSchnitthindernisabbildung p∗ steht in der Stabilisierungssequenz an einer wichtigen Stel-le. Deshalb gehen wir in diesem Abschnitt noch einmal ausführlicher auf diese Abbildungein und stellen die bisher etwas verstreut liegenden Ergebnisse in einer kurzen Übersichtzusammen.
Die Abbildung p∗ hat zwei Aspekte, zum einen dient sie als Bündelreduktionshin-dernis für Elemente x in +Vektn+mR (ΣX), denn genau dann hat x ein n-dimensionalesBündel als Repräsentanten, wenn p∗(x) verschwindet. Zum anderen operiert die Grup-pe +Vektn+mR (ΣX) über p∗ auf der Menge der Gauß-Abbildungen [X ,Vm(R
n+m)]. ZweiGauß-Abbildungen g1 , g2 ∶ X → Vm(R
n+m) beschreiben isomorphe n-dimensionale Bün-del ξn über X , wenn sie im gleichen Orbit unter dieser Operation liegen.
Wir wiederholen aus Abschnitt 6.2.3 die Beziehung zwischen stabil trivialen Bündelnund Gauß-Abbildungen: Gegeben sei eine Abbildung g ∶ X → Vm(R
n+m). Ein Punkt g(x)aus Vm(R
n+m), also ein m-Bein im Rn+m , definiert indem man die Standardbasis von Rm
auf dieses m-Bein abbildet und linear fortsetzt, eine lineare Abbildung g(x) ∶ Rm → Rn+m
und damit einen Bündelmonomorphismus g ∶ X × Rm → X × Rn+m . Das orthogonaleKomplement zum Bildbündel von g ist das zu g gehörende stabil triviale Bündel ωg mitj∗([g]) = [ωg] und g ist die Gauß-Abbildung von ωg . Man hat eine Trivialisierung ωg ⊕
Rm ≅ Rn+m und jedes ξmit ξ⊕Rm ≅ Rn+m entsteht auf diese Weise. Mit g = id erhält mandas kanonische Bündel γm ,m+n über Vm(R
n+m)mit g∗(γm ,m+n) ≅ ωg . Gilt also p∗ = 0, soist die Zuordnung ωg ←→ g zwischen Isomorphieklassen und Homotopieklassen wie beimKlassifikationssatz +VektnR(X) ≅ [X , BSO(n)] bijektiv.
Wir diskutieren die Fälle dimB = n, den metastabilen Bereich dimB < 2n− 2 und kurzeinen darüber liegenden sesquimetastabilen Dimensionsbereich. Weiterhin kann man dieExtremfälle m = 1 und m = ∞ unterscheiden.
Mit der in (5.3.1) eingeführten Notation
STn(B) = {[ξ] ∈ +VektnR(B)∣ [ξ]s = 0}
für die Menge der Isomorphieklassen stabil trivialer n-dimensionaler Bündel über einemendlichen Komplex B erhält man aus der allgemeinen Stabilisierungssequenz
→ [B, SO]p∗
→ [B, SO/SO(n)] → [B, BSO(n)] Bi∗
→ [B, BSO] (9.2.1)

9.2 Schnitthindernisse und stabil triviale Bündel 531
und (6.2.19) für genügend großes m sofort STn(B) als Kokern von p∗:
Proposition 9.2.2. Für einen endlichen Komplex B hat man
STn(B) ≅ [B, SO/SO(n)]/p∗[B, SO]
und im metastabilen Bereich dimB ≤ 2n − 2 gilt mit der Abbildung θ aus (6.2.19):
STn(B) ≅ {B, P∞(R)nλ}/θ ○ p∗[B, SO].
Die stabil trivialen Bündel werden also hier durch ihre Gauß-Abbildungen beschrie-ben und modulo der Operation von [B, SO] auch klassifiziert. Dabei wurde wieder SO fürSO(n +m) bzw. P∞(R)nλ für Pm−1(R)nλ mit m groß geschrieben.
Dies verallgemeinert den einfachsten Fall (5.3.3), nämlich dimB = n. Hier fallen m = 1und m = ∞ zusammen und es gilt
{B, P∞(R)nλ} ≅ {Hn(B;Z/2), n ≡ 1 mod 2Hn(B;Z), n ≡ 0 mod 2
und die Abbildung p∗ ist in diesem Fall durch die Euler-Klasse gegeben.
Beispiele.
1. Für B = Pn(R) ist p∗ ∶ [Pn(R), SO] → [Pn(R), SO/SO(n)] surjektiv, wie dieBerechnung der Euler-Klasse der Spiegelungsabbildung Rn+1 zeigt und damit folgtSTn(Pn(R)) = 0.
2. Ist B eine 9-fache Einhängung (und dimB ≤ n), so ist nach (4.5.11) die Abbildung p∗trivial und STn(B) durch Hn(B;Z/2) bzw. Hn(B;Z) gegeben.
3. Ist B eine Sphäre, sowird das letzte Beispiel durch den Satz vonBarratt-Mahowald (9.1.1)auf den metastabilen Bereich erweitert.
4. Für B = Pm(C) gilt SVektR(ΣPm(C)) = 0, siehe (5.5.2). Hier spielt somit die Abbildungp∗ keine Rolle und es folgt
STn(Pm(C)) ≅ {Pm(C); P∞(R)nλ} (2m ≤ 2n − 2).
9.2.2 Die Hindernisabbildung p∗
Wir diskutieren als nächstes den Schnitthindernisaspekt im metastabilen Bereich. Auf+VektnR(B) ist für dimB = n die Euler-Klasse ein vollständiges Hindernis für die Existenzeines nullstellenfreien Schnitts. Metastabil, also für dim B < 2n − 2 ist die in [Cra80] de-finierte, aber hier nicht betrachtete, stabile Kohomotopie-Euler-Klasse γ ein vollständigesHindernis für einen Schnitt. Um ein Schnitthindernis für r Schnitte zu erhalten, übersetzt

532 9 Vektorbündel im metastabilen Bereich
man dieses Problemmit (2.3.8) in ein Einschnittproblem und verwendet wieder die stabileKohomotopie-Euler-Klasse γ.
Metastabil ist die wichtigste Erkenntnis die, daß das Schnittproblem nur von der unter-liegenden sphärischen Faserung abhängig ist. Auf einer Einhängung ΣB, wo die Abbildungp∗ das vollständige Schnitthindernis ist, erhält man für dimB ≤ 2n−2 eine Übersetzung ineinAushängungsproblem, zusammengefaßt in folgendemkommutativenDiagramm (siehe(6.4.23)):
+VektnR(ΣB)i⊕
�→ +SVektR(ΣB)p∗
�→ [B,SO/SO(n)]↓ J ↓ J ≅ ↓ θ
[ΣnB, Sn]σ∞
�→ π0s (B)
H(n)�→ {B, P∞(R)nλ}
(9.2.3)
Man kann jetzt p∗(x) = 0 zeigen, indem man J(x) ∈ Bild(σ∞) nachweist. Die Abbil-dung H(n) , die hier ja über θ definiert wurde (6.4.22), wird erst nützlich, wenn man eine
unabhängige Beschreibung für sie herleitet.Für m = 1 liegt diese unabhängige Beschreibung durch die Beziehung zwischen Stabili-
sierungssequenz und EHP-Sequenz vor (8.3.14):
�→ [X ,SO(n)] i∗
�→ [X ,SO(n + 1)]p∗
�→ [X , Sn]
↓ J ↓ J ↓ En+1
�→ [ΣnX , Sn](2)
E�→ [Σn+1X , Sn+1]
(2)γ2�→ [Σn+1X , S2n+1]
(2)
Ist X eine Einhängung, so kommutiert dieses Diagramm und unter der Voraussetzungdim X < 2n − 1 ist En+1 bijektiv und p∗ wird durch J-Homomorphismus und Hopf-Invariante gegeben.
Wir verschaffen uns zum Schluß noch einen ersten Eindruck von dem, was man un-terhalb des metastabilen Dimensionsbereichs zu erwarten hat. Einfachheitshalber sei Xweiter eine Einhängung. Das Schnitthindernis p∗(x) zu x ∈ [X , SO(n + 1)] hat fürdim X ≥ 2n − 1 eine zweistufige Übersetzung. Das primäre Hindernis ist immer nochγ2 ○ J(x). Verschwindet dies - hat also die unterliegende sphärische Faserung einen tri-vialen Summanden - liegt p∗(x) im Kern der (n + 1)-fachen Einhängung En+1, das ist diezweite Stufe. Setzt man jetzt X als n-fache Einhängung X = ΣnB voraus, kann man wiefolgt die iterierte Einhängungssequenz von James zur Untersuchung von En+1 heranzie-hen. Man verwendet [ΣnB, Sn] ≅ [B, Ωn
0 Sn] ≅ [B, Ωn1 Sn] ≅ [B,SF(n)] und schreibt damit
En+1 ∶ [X , Sn] �→ [Σn+1X , S2n+1] um in [B,SF(n)] �→ [B,SF(2n+ 1)] und hat dann En+1
in eine exakte Sequenz
[ΣB,SF(2n + 1)/SF(n)] �→ [B,SF(n)]En+1
�→[B,SF(2n + 1)] �→ [B,SF(2n + 1)/SF(n)]
eingebettet. Für dim X < 3n−1 hat man [B,SF(2n+1)/SF(n)] ≅ [B,SO/SO(n)] und kannEn+1 immer noch durch Homotopiegruppen von Stiefel-Mannigfaltigkeiten SO/SO(n)kontrollieren (6.4.4). Dazu ist allerdings noch eine genauere Untersuchung und Beschrei-bung der resultierenden Abbildungen nötig. Diesen Dimensionsbereich nennen wir sesqui-metastabil.

9.3 James-Periodizität 533
Hier wurde nur der einfachste Fall X = S4k−1, n = 2k für eine Bündelreduktionx = ω′4k−1 ∈ [S
4k−1 ,SO(2k+1)] des stabilen Erzeugenden ω4k−1 ∈ [S4k−1 ,SO] ≅ Z voll-ständig ausgeführt (9.1.11). Außer für kleine Werte von k verschwindet das erste Hindernisγ2 ○ J(ω′4k−1) und p∗(ω′4k−1) ∈ [S
4k−1 ,SO(2k + 1)/SO(2k)] ≅ π4k−1(S2k) ist ein Vielfachesdes Whitehead-Produkts [i2k , i2k]. Damit ist auch klar, wie das erste nichttriviale Bündel-reduktionshindernis für ω4k−1 ∈ [S4k−1 ,SO] selbst aussieht. Nach (9.1.10) ist die Abbildungp∗ ∶ π4k−1(SO) �→ π4k−1(SO(d)) trivial für d ≥ 2k + 1. Eine Beschreibung der Hindernis-klasse für den ersten nichttrivialen Fall d = 2k. erhalten wir wie folgt: Mit ρ bezeichnen wirein Erzeugendes der Gruppe
π2k(SO/SO(2k)) ≅ {S2k , P∞(R)2kλ} ≅ H2k(S2k ;Z) ≅ Z,
das sich nach (6.2.15) durch eine Gauss-Abbildung S2k = V1(R2k+1) �→ V1+d(R
2k+1+d)
des Tangentialbündels τS2k für d groß oder durch die Inklusion der untersten Zel-le von SO/SO(2k) repräsentieren läßt. Dann ist das Whitehead-Produkt [ρ, ρ] ∈
π4k−1(SO/SO(2k)) definiert.
Proposition 9.2.4. Das stabile Erzeugende ω4k−1 wird unter der Hindernisabbildungp∗ ∶ [S4k−1 ,SO] �→ [S4k−1 ,SO/SO(2k)] auf ein Vielfaches des Whitehead-Produktes[ρ, ρ] abgebildet. Diese Hindernisklasse ist von unendlicher Ordnung.
Beweis. Die Inklusion i ∶ SO(2k + 1) → SO induziert das kommutative Quadrat
π4k−1(SO(2k + 1))i∗
�→ π4k−1(SO)↓ p
∗
↓ p∗
π4k−1(S2k) ≅ π4k−1(SO(2k + 1)/SO(2k))i∗
�→ π4k−1(SO/SO(2k))
und aus den Natürlichkeitseigenschaften des Whitehead-Produkts folgt i∗([i2k , i2k]) =[ρ, ρ] in der unteren Zeile. Aus i∗(ω′4k−1) = ω4k−1 und p∗(ω′4k−1) = λ2k ⋅ [i2k , i2k] (9.1.11)folgt dann die Behauptung. Da auch kein Vielfaches von ω4k−1 eine weitere Bündelredukti-on zuläßt, kann p∗(ω4k−1) nicht von endlicher Ordnung sein.
Bemerkung. Das Whitehead-Produkt [ρ, ρ] ∈ π4k−1(SO/SO(2k)) ist eine Gauß-Abbildung für das Samelson-Produkt ⟨cτS2k , cτS2k ⟩ der Klebeabbildungen des Tangenti-albündels τS2k , wie man leicht sieht, indem man das letzte Diagramm mit den jeweiligenRandoperatoren nach unten erweitert und (9.1.19) verwendet.
9.3 James-Periodizität
James-Periodizität ist ein weiteres metastabiles Phänomen. Sie betrifft zunächst Gauß-Abbildungen g ∶ X �→ Vk(R
n), die - wenn auch nicht immer eindeutig - stabil trivialeBündel beschreiben (siehe Abschnitt 6.2.3), und im metastabilen Dimensionsbereich einperiodisches Verhalten zeigen.

534 9 Vektorbündel im metastabilen Bereich
Wir benötigen wieder die Ordnung der durch das kanonische Linienbündel λRn inSVektR(Pn(R)) gegebenen Klasse. Ist ϕ(n) die Anzahl der Zahlen zwischen 1 und n, diezu 0, 1, 2, 4 kongruent modulo 8 sind:
ϕ(n) ∶= ∣{s ∣ 0 < s ≤ n und s ≡ 0, 1, 2, 4 mod 8}∣ ,
so gilt nach (5.5.8), daß die Gruppe SVektR(Pn(R)) zyklisch von der Ordnung 2ϕ(n) mit[λRn]s als Erzeugendem ist. EinVergleich von nmit 2ϕ(n) und die Stabilisierungssätze zeigendann, daß auch schon 2ϕ(n) ⋅ λRn trivial und nicht nur stabil trivial ist.
Für s = t ⋅ 2ϕ(k−1) , t ≥ 0, konstruiert James über den inneren Verbund von Stiefel-Mannigfaltigkeiten eine Abbildung
Pk ∶ ΣsVk(Rn) �→ Vk(R
n+s),
die nach Komposition mit der s-fachen Einhängung Es die James-Periodizität
[X ,Vk(Rn)]
Es
�→ [ΣsX , ΣsVk(Rn)]
Pk∗�→ [ΣsX ,Vk(R
n+s)]
induziert. Unter der Voraussetzung dim X < 2(n − k) − 1 ist dies eine Bijektion ([Jam76,§2]). Wir beschreiben die Konstruktion von Pk weiter unten, denn diese ermöglicht völligexplizite Formeln, beweisen den folgenden Satz aber mit einer etwas anders definiertenAbbildung, die einen sehr kurzen Beweis ermöglicht.
Satz 9.3.1. Für einen endlichenKomplex X mitdim X < 2(n−k)−1und s = t⋅2ϕ(k−1) , t ≥0, hat man eine Bijektion
[X ,Vk(Rn)] ≅ [ΣsX ,Vk(R
n+s)].
Beweis. Nach dem Einhängungssatz und (6.2.18) ist unter den getroffenen Dimensionsvor-aussetzungen die Komposition
[X ,Vk(Rn)]
R∗
←� [X , Pn−1(R)/Pn−1−k(R)]Es
�→ [ΣsX , ΣsPn−1(R)/Pn−1−k(R)]
eine Bijektion. Hier zeigt sich ein neues Phänomen: Nach (3.6.22) können wirPn−1(R)/Pn−1−k(R)mit demThom-Raum eines Vielfachen des kanonischen Linienbündelsλ = λRm identifizieren:
Pn−1(R)/Pn−1−k(R) ≅ Pk−1(R)(n−k)λ .
Für s wie oben haben wir eine Trivialisierung F ∶ Rs ≅→ s ⋅ λ, die zusammenmit der Identitätauf (n − k) ⋅ λ und der BeziehungM(ξ⊕Ra) ≅ ΣaM(ξ) fürThom-Räume obige Bijektionzu
[X ,Vk(Rn)] ≅ [ΣsX , ΣsPn−1(R)/Pn−1−k(R)] ≅ [ΣsX , ΣsPk−1(R)
(n−k)λ]
≅ [ΣsX , Pk−1(R)(n−k)λ⊕Rs
] ≅ [ΣsX , Pk−1(R)(n−k+s)λ]
fortsetzt. Die letzteGruppe ist aber isomorph zu [ΣsX ,Vk(Rn+s)]unddie Behauptung folgt.

9.3 James-Periodizität 535
Als Ursache für die James-Periodizität kann man also die Existenz der TrivialisierungF ∶ Rs ≅→ s ⋅ λ ansehen. Hält man k fest, so gibt es, da [λ]s von endlicher Ordnung ist, bis aufEinhängungen nur endlich viele Homotopietypen unter den Räumen Pk−1(R)
mλ fürm ∈ Nund man erhält eine Periodizität.
Für die Anwendungen auf die Menge der Isomorphieklassen stabil trivialer n-dimensionaler Bündel über B
STn(B) = {[ξ] ∈ +VektnR(B)∣[ξ]s = 0}
müssen wir die Dimensionen etwas umschreiben. Zunächst gilt nach (9.2.2)
STn(B) ≅ [B, SO/SO(n)]/p∗([B, SO])
und für eine Sphäre B = Sk+1 ist nach (9.1.1) für 15 < k < 2n − 2 die Untergrup-pe p∗([Sk+1 , SO]) trivial. Nach (6.2.14) und (6.2.6) können wir [Sk+1 , SO/SO(n)] durch[Sk+1 , SO(k + 3)/SO(n)] ersetzen und dann - ebenfalls für k < 2n − 2 - James-Periodizität(9.3.1) anwenden. Für smüssen wir jetzt ein Vielfaches von 2ϕ(k+2−n) wählen. Das Ergebnisist:
Korollar 9.3.2. Für 15 < k < 2n − 2 und s = t ⋅ 2ϕ(k+2−n) , t > 0, gilt
STn(Sk+1) ≅ STn+s(Sk+1+s).
Schließt man die Fälle k + 2 − n < 4 aus, so ist s immer durch 8 teilbar, man hat Bott-Periodizität πk(SO) ≅ πk+s(SO) und kann (9.1.1) in der umgekehrten Richtung verwendenund erhält:
Korollar 9.3.3. Für 15 < k < 2n − 2 und s = t ⋅ 2ϕ(k+2−n) , t > 0, k − n ≥ 6 gilt
πk(SO(n)) ≅ πk+s(SO(n + s)).
Dies erklärt die zunächst rein rechnerisch gefundene Periodizität in den Tabellen derersten instabilen Homotopiegruppen der orthogonalen Gruppen wie in (3.3.19). Sie ist alsoeine Zusammensetzung aus zwei grundverschiedenen Periodizitäten.
Vor den Beispielen, wie angekündigt, noch die Konstruktion der Abbildung Pk . Dieinnere Verbundabbildung ([Jam76, §2])
hk ∶ Vk(Rm) ⋆ Vk(R
n) �→ Vk(Rm+n)
verallgemeinert den durch h1([x , t, y]) = (x ⋅cos(t ⋅π/2), y ⋅sin(t ⋅π/2)) ∈ Rm+n gegebenenHomöomorphismus h1 ∶ Sm−1 ⋆ Sn−1 → Sm+n−1 und wird wie folgt konstruiert. Gegebenseien k-Beine u = (u1 , u2 , ..., uk) und v = (v1 , v2 , ..., vk) im Rm bzw. Rn . Dann definiertman hk([u, t, v]) ∶= (w1 ,w2 , ...,wk) mit wi ∶= h1([ui , t, vi]). Sind u und v orthogonale

536 9 Vektorbündel im metastabilen Bereich
k-Beine, dann gilt dies auch für w. Weiter benötigt man einen Schnitt ρ der kanonischenProjektion p ∶ Vk(R
m) → V1(Rm) = Sm−1 , die ein k-Bein u = (u1 , u2 , ..., uk) auf den letzten
Vektor uk abbildet. Man definiert dann Pk durch die Komposition
Pk ∶ ΣmVk(Rn) ≅ V1(R
m) ⋆ Vk(Rn)
ρ⋆id�→ Vk(R
m) ⋆ Vk(Rn)
hk�→ Vk(R
m+n).
Der Beweis der James-Periodizität (9.3.1) unter Verwendung von Pk ist eine Induktion, dieähnlich wie im Beweis von (6.2.18) verläuft.
Wir wissen bereits (siehe Abschnitt 6.2.4), daß ein Schnitt ρ ∶ V1(Rm) �→ Vk(R
m)
genau dann existiert, wenn es k − 1 Vektorfelder auf Sm−1 gibt und das ist nach dem Vek-torfeldsatz (7.3.6), (7.3.4) äquivalent zu m ≡ 0 mod 2ϕ(k−1). Hier benötigen wir nur die kon-struktive Seite des Vektorfeldsatzes. Unter der Bedingung m ≡ 0 mod 2ϕ(k−1) haben Hur-witz und Radon die benötigten Vektorfelder explizit durch Matrizen konstruiert ([Eck99]).Alternativ kannman Clifford-Algebren zur Konstruktion verwenden (siehe (9.4.8)). Damiterhält man sowohl die k − 1 Schnitte für ρ wie auch die oben im Beweis zu (9.3.1) benötigteTrivialisierung F ∶ Rm ≅ m ⋅ λk−1 durch explizite Formeln.
Beispiele 9.3.4. Die Gruppen πn−1(SO(n)) und πn(SO(n)) wurden bereits mit der Sta-bilisierungssequenz bestimmt (3.3.19). Wir setzen hier n > 7 voraus und verwenden dieBezeichnung (τSn)⟨−r⟩ für eine (n − r)-dimensionale Bündelreduktion von τSn , also demorthogonalen Komplement von r linear unabhängigen Vektorfeldern.
a) Für STn(Sn) hat man
STn(Sn) = πn(SO/SO(n)) = πsn(Pn+1(R)/Pn−1(R)) = πs
n(P1(R)nλ)
und STn(Sn) ≅ STn+2t(Sn+2t) für t ≥ 0.
Zur Bestimmung von πsn(P1(R)
nλ) sind nur die beiden Fälle P1(R)λ ≅ P2(R) und
P1(R)2λ ≅ P1(R)R2≃ Σ2(P1(R)+) ≃ S3 ∨ S2 zu untersuchen. Man erhält sofort
πsn(Pn+1(R)/Pn−1(R)) ≅ {
Z n geradeZ/2 n ungerade (9.3.5)
b)STn(Sn+1) ≅ πs
n+1(P2(R)nλ) ≅ STn+4t(Sn+1+4t), t ≥ 0
n mod 4 STn(Sn+1) Bündel0 Z/2⊕Z/2 η∗(τSn), (τSn+1)⟨−1⟩
1 Z/2 η∗(τSn)
2 Z/4 (τSn+1)⟨−1⟩ , η∗(τSn)
3 0
(9.3.6)
Die ersten beiden Fälle sind mit Kenntnis von πs0(S0) und πs
1(S0) wegen P2(R)4mλ≅

9.3 James-Periodizität 537
Σ4m(P2(R)+) und P2(R)(4m+1)λ ≅ Σ4mP3(R) ganz leicht zu verifizieren, die beidenanderen laufen auf die Berechung von πs
3(P4(R)/P1(R)) und πs4(P5(R)/P2(R)) hin-
aus und wurden bereits in (6.3.12) behandelt. Weiter unten skizzieren wir eine K-theoretische Berechnung.
c)STn(Sn+2) ≅ πs
n+2(P3(R)nλ) ≅ STn+4t(Sn+2+4t), t ≥ 0
n mod 4 STn(Sn+2) Bündel0 Z/2⊕Z/2 η2∗(τSn), η∗((τSn+1)⟨−1⟩)
1 Z/8 (τSn+2)⟨−2⟩
2 0 (τSn+1)⟨−1⟩ , η∗(τSn)
3 Z/2 (η∗(τSn+1))⟨−1⟩
(jedoch gilt ST5(S7) = 0, wie in einem Beispiel oben ausgeführt wurde.)
d) Für STn(Sn+d), d = 3, 4, 5, 6, ist die Periode dann 8 statt 4, denn erst 8λd+1 ist trivial.
Bemerkungen. Die Übersetzung von STn(Sk+1) in eine stabile Homotopiegruppe ist einwesentlicher Schritt zu ihrer Berechnung. Dies ermöglicht den Einsatz der für eine verallge-meinerte Homotopietheorie wie πs
∗(-) zur Verfügung stehenden Methoden, wie Spektral-
sequenzen, Kohomologieoperationen, Dualität usw. Obwohl wir dies hier nicht ausführenkönnen, sei kurz angedeutet, wie man die oben aufgelisteten Berechnungen durchführenkann.
Am systematischsten ist die Verwendung der Atiyah-Hirzebruch Spektralsequenz, wonur die Kenntnis der ersten Differentiale, etwa d2, das durch Sq2 gegeben wird, benötigtwird, um die Gruppenordnungen zu bestimmen.
Zumindest für d = 0, 1 ist auch eine rein K-theoretische Berechnung vonπsn+d(Pd+1(R)
nλ) möglich. Verwendet man die Struktur der ersten drei stabilen Ho-motopiegruppen, so folgt leicht, daß der Übergang von stabiler Homotopie zu (zusam-menhängender) reellen K-Theorie mittels der Hurewicz-Abbildung eine 3-Äquivalenzist, sodaß man den Vergleichssatz anwenden kann. Zur Illustration behandeln wir denFall πs
n+1(P2(R)nλ) für n = 4m + 2. Die Gruppe πs
3(P2(R)2λ) ist über S-Dualität
isomorph zu {P2(R)3λ , S4} ≅ {P5(R)/P2(R), S4}. Der Hurewicz-Homomorphismush ∶ {Σ4P5(R)/P2(R), S8} �→ SVektR(Σ4P5(R)/P2(R)) ist dann noch surjektiv. Die Grup-pe SVektR(Σ4P5(R)/P2(R)) ist als Kern des von der Inklusion P2(R) ⊂P5(R) induziertenHomomorphismus zyklisch und hat 4 Elemente. Da {Σ4P5(R)/P2(R), S8} höchstens vie-relementig ist, folgt πs
3(P2(R)2λ) ≅ Z/4. Die dabei verwendete Berechnung der Gruppen
SVektR(Σ4Pn(R)) verläuft ähnlich wie die unter (5.5.8) durchgeführte Bestimmung vonSVektR(Pn(R)), siehe (5.5.9). Eine etwas systematischere Behandlung zusammen mit ei-nem Verfahren zur Identifikation der Bündel findet man im nächsten Abschnitt unter demStichwort “Adams-Filtrierung-0-Bündel”.

538 9 Vektorbündel im metastabilen Bereich
Die nichttriviale Gruppenerweiterung in STn(Sn+1) ≅ πsn+1(P2(R)
nλ) ≅ Z/4 für n =
4m+ 2 hat eine interessante Folgerung. Es sei ϑ = (τSn+1)<−1> ≅ π∗(τP2m+1(C)) das ortho-gonale Komplement zu dem in (2.1.8) erwähnten Vektorfeld mit i⊕[ϑ] = [τSn+1]. Sowohlη∗(τSn) wie auch ϑ definieren nichttriviale Klassen in STn(Sn+1). Die Stabilisierungsse-quenz zeigt dann
[η∗(τSn)] = 2 ⋅ [(τSn+1)<−1>] (9.3.7)
Damit liefern die noch verbleibenden ρ(n+ 1)− 2 punktweise linear unabhängigen Vektor-felder in (τSn+1)<−1> Schnitte in η∗(τSn). Dies ist ein wesentlicher Schritt in der Lösungdes Schnittproblems für das Bündel η∗(τSn), siehe [CrS79].
Auch im komplexen Fall gibt es eine analoge Periodizität, jedoch mußman anstelle dernicht endlichen Ordnung von λCm in SVektC(Pm(C)) die Ordnung von J(λCm) in J(Pm(C))heranziehen. Da faserhomotopieäquivalente Vektorbündel homotopieäquivalente Thom-Räume haben, reicht dies aus. Stabil-faserhomotopieäquivalent führt man auf faserhomoto-pieäquivalent zurück, indemman die Dimensionen der Bündel ausreichend großwählt, fürdie Thom-Räume ergibt dies nur zusätzliche Einhängungen. Die Ordnung bm von J(λCm)in J(Pm(C)) ist, wie bereits in (7.2.12) ohne Herleitung angegeben, durch
νp(bm) ∶= max{s + νp(s)∣0 ≤ s ≤ [ mp − 1
]}
für jede Primzahl p und [k] der größten ganzen Zahl kleiner gleich k, festgelegt. Es istb2t+1 = b2t für t > 0.
Beispiele.
1.m 1 2 4 6bm 2 24 2880 362880
2. ΣdP2(C)a⋅λC+24⋅tλC ≃ Σd+2⋅24tP2(C)a⋅λ
C
(d genügend groß).
3. Metastabil giltπ2n+1+2m(U(n)) ≅ πs
2n+2m+1(Pm+1(C)nλC)
z. B. erhält man so leicht (3.3.37)
π2n+1(U(n)) ≅ πs2n+1(P1(C)
nλC) ≅ {
0 n ≡ 1 mod 2Z/2 n ≡ 0 mod 2
9.4 VektorfelderaufSphärenundstabil parallelisierbarenMannigfaltigkeiten
In den beiden letzten Kapiteln spielt das Vektorfeld-Problem die Hauptrolle. Dieses Pro-blem hat nicht nur viele Mathematiker fasziniert, sondern auch zu zahlreichen interessan-ten Untersuchungen angeregt und steht in enger Beziehung zu einer Reihe anderer geome-trischer Fragestellungen, etwa zu Eigenschaften desWhitehead-Produkts, zu Differentialen

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 539
in der EHP-Spektralsequenz oder der Struktur der anheftendenAbbildungen in projektivenRäumen (siehe Beweis zu (3.3.10)). Hier gehen wir deshalb noch einmal ausführlich auf dieverschiedenen, zum Teil etwas längeren Beweismethoden ein, bei denen die Frage nach derMaximalzahl von Vektorfeldern auf Sn−1 fast immer in homotopietheoretische Problemeüber projektiven Räumen übersetzt werden. Ein kurzer Beweis des Vektorfeldsatzes wurdebereits im Abschnitt 7.3.1 besprochen.
Die klassische Behandlung des Vektorfeld-Problems, die in vielen Punkten auf Jameszurückgeht und bei der Gauß-Abbildungen und S-Dualität eingesetzt werden, läßt sichwie folgt skizzieren: Man geht von gegebenen r − 1 Vektorfeldern auf Sn−1 aus. Durch Ab-spalten dieser Vektorfelder erhält man eine (n − r)-dimensionale Bündelreduktion ξ vonτSn−1 , die wir oft auch als (τSn−1)⟨−r+1⟩ notieren. Deren Gauß-Abbildung gξ ∶ Sn−1 →
SO(n)/SO(n − r) liegt i.A. im metastabilen Bereich und liefert durch Faktorisierungüber die Spiegelungsabbildung und S-Dualität eine π∗s -Thom-Klasse des stabilen Bündels[−nλRr−1]s über Pr−1(R). Da ein Bündel genau dann eine π∗s -Thom-Klasse besitzt, wenn esJ-trivial ist, löst die Berechnung KO0
(Pr−1(R)) ≅ J(Pr−1(R)) dann dasVektorfeld-Problem,man hat am Ende nur noch den maximalen Wert von r, für den nλRr−1 stabil trivial ist, zubestimmen.
Diese Übersetzung funktioniert auch in der umgekehrten Richtung indem man voneinerThom-Klasse ausgeht. Im reellen Fall ist diese natürlich nicht wichtig, da sich die ma-ximale Anzahl von Vektorfeldern nach Hurwitz-Radon oder mittels Clifford-Algebren reinalgebraisch konstruieren lassen. Im analogen komplexen Problem ist jedoch keine solcheKonstruktion bekannt und man ist auf die Rückrichtung angewiesen, für die zumindestdie Existenz der benötigten Thom-Klassen bekannt ist. Die Verwendung von S-Dualitätverkompliziert leider oft die Notation und Übersicht, ist aber aus zwei Gründen notwen-dig. Einmal erhält man durch sie die Verbindung zur π∗s -Thom-Klasse von [−nλRr−1]s , zumandern vermeidet sie die sonst notwendige Einführung von K-Homologie in den Anwen-dungen.
Der Übergang zu Gauß-Abbildungen, der fast immer den Weg zur Lösung der hier be-handelten Probleme weist, also, wenn man so will, die Hauptmethode darstellt, hat zweifundamentale Aspekte und Vorteile. Zum einen verbessert der höhere Zusammenhang derStiefel-Mannigfaltigkeit die Stabilitätseigenschaften, dies wird der Hauptaspekt in diesemKapitel sein, zum anderen besitzt die Gauß-Abbildung eines Bündels oft eine niedrigereAdams-Filtrierung als seine klassifizierende Abbildung selbst, d.h. sie läßt sich oft leichterals nichttrivial nachweisen, dies ist dann Thema im nächsten Kapitel. So liegt beispielswei-se die Gauß-Abbildung einer Bündelreduktion des Tangentialbündels der Sphäre bis aufwenige Ausnahmen schon im stabilen Bereich und kann mit stabilen Methoden behandeltwerden. Ganz ähnlich wird dann auch das Vektorfeld-Problem für stabil-parallelisierbareMannigfaltigkeiten gelöst. Die oben skizzierte Übersetzung des Vektorfeld-Problems in einstabiles Problem läßt sich mit etwas mehr Aufwand, aber den gleichen Methoden, auf dieganze Stabilisierungssequenz für Sphären erweitern und diese so vollständig in den stabi-len Bereich transformieren: Schränkt man nämlich die Stabilisierungssequenz auf stabil-triviale Bündel ein, so bleibt sie als Folge des Satzes von Barratt-Mahowald exakt und kannin eine exakte Sequenz von stabilen Kohomotopiegruppen von Thom-Räumen übersetzt

540 9 Vektorbündel im metastabilen Bereich
werden. Als wichtige Anwendung hiervon werden wir ein altes Resultat von Toda, in demdie Homotopie-Euler-Klasse einer bestimmten maximalen Bündelreduktion (τSn)⟨−r⟩ desTangentialbündels der Sphäre bestimmt wird - also das Hindernis für ein weiteres Vektor-feld - herleiten. Einige der zahlreichen Anwendungen dieses Satzes finden sich dann imnächsten Kapitel.
In den Beweisen und Diagrammen der folgenden Abschnitte verwenden wir wieder oftPs als Abkürzung für Ps(R) und Pb
k für den Quotientenraum Pb(R)/Pk−1(R).
9.4.1 Vektorfelder auf Sphären
Gauß-Abbildungen für Vektorfelder. Wir folgen hier der üblichen Konvention, dieVektorfelder auf Sn−1 zu betrachten und nehmen in diesem Abschnitt an, daß n gerade istund n ≠ 2, 4, 8 gilt. Für n = 2a+4b(2c + 1), 0 ≤ a ≤ 3, ist dann ρ(n) − 1 = 2a + 8b − 1die Maximalzahl linear unabhängiger Vektorfelder auf Sn−1. Das Vektorfeld-Problem fürSphären läßt sich - bis auf einige niedrigdimensionale Ausnahmen - als ein metastabilesProblem formulieren und lösen. Der Schlüssel hierzu ist der Übergang von der klassifi-zierenden Abbildung zur Gauß-Abbildung, der die Ausnutzung des höheren Zusammen-hangs der Stiefel-Mannigfaltigkeiten zuläßt. Der Zusammenhang zwischen Vektorfeldernauf Sn−1, Schnitten in Stiefel-Mannigfaltigkeiten, Bündelreduktionen ξ von τSn−1 undderenGauß-Abbildungen gξ wurde bereits in Abschnitt 6.2 und in (6.2.12) ausgeführt. Das folgen-de homotopiekommutativeDiagramm ist die homotopietheoretischeVersion des Problemsund dieser Diskussion, faßt diese Beziehungen kurz zusammen und dient gleichzeitig auchnoch einmal als Beweis:
SO(n)/SO(n − r) SO(n)/SO(n − 1)
Sn−1 BSO(n − r) BSO(n − 1)
BSO(n) BSO(n)
��p
��� ���� �� �
j
����� �� �� �
��f ξ
��������������������
gξ
��Bin−1
��� ���� �� �
Bin
����� �� �� �
(9.4.1)
Beginnt man mit r − 1 Vektorfeldern auf Sn−1 erhält man durch Abspalten des von denVektorfeldern erzeugten Unterbündels eine (n − r)-dimensionale Bündelreduktion ξ =(τSn−1)⟨−r+1⟩ von τSn−1 mit Rr−1 ⊕ ξ ≅ τSn−1 oder äquivalent Bin−1 ○ fξ ≃ fτSn−1 für dieklassifizierenden Abbildungen der Bündel. Wegen Rr ⊕ ξ ≅ τSn−1 ⊕ R ≅ Rn ist die Kompo-sition Bin ○ fξ nullhomotop und fξ hat eine Gauß-Abbildung gξ als Lift. Die Kompositionp ○ gξ ist dann eine Gauß-Abbildung für τSn−1 , aber nicht unbedingt die Standard-Gauß-Abbildung gτSn−1 = idSn−1 . Das Diagramm zeigt, daß die Unbestimmtheit in der Wahl einerGauß-Abbildung für τSn−1 , nämlich 2Z ⊂ πn−1(Sn−1) über p faktorisiert und deshalb gξso abgeändert werden kann, daß p ○ gξ ≃ idSn−1 = gτSn−1 gilt. Das Argument in (6.2.11) isthier allerdings direkter und eingängiger. Wir wählen nun gξ im Folgenden immer so, daßdies gilt, also gξ ein Schnitt von p ist. (Diese spezielle Wahl von gξ erleichtert jedoch einige

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 541
Formulierungen und ist nicht unbedingt nötig.) Umgekehrt liefert eine Gauß-Abbildunggξ mit p ○ gξ ≃ idSn−1 über Rr−1 ⊕ ξ ≅ τSn−1 die gesuchten Vektorfelder. Damit gilt:
Lemma 9.4.2. Durch r − 1 Vektorfelder auf Sn−1 erhält man eine Gauß-Abbildung gξ ∶Sn−1 �→ SO(n)/SO(n − r)mit p ○ gξ ≃ idSn−1 und umgekehrt.
Bei diesen Gauß-Abbildungen handelt es sich um die instabile Version, später werdenauch die stabilen Gauß-Abbildungen gstξ ∶ S
n−1 �→ SO(n + d)/SO(n − r) mit genügendgroßem d eine wichtige Rolle spielen. Diese erhält man aus gξ durch Komposition mit derInklusion SO(n)/SO(n − r) ⊂ SO(n + d)/SO(n − r).
Die Beziehung zwischen Gauß-Abbildung und klassifizierender Abbildung ist durchj ○ gξ ≃ fξ in obigem Diagramm gegeben. Arbeitet man mit der Klebeabbildung cξ von ξübersetzt sich dies in
∂1([gξ]) = [cξ], (9.4.3)
wobei ∂1 der Randoperator aus der Homotopiesequenz des SO(n − r)-Prinzipalbündelsp1 ∶ SO(n) �→ SO(n)/SO(n−r), also der allgemeinen Stabilisierungssequenz für Sphärenist:
→ [Sn−1 , SO(n)/SO(n − r)] ∂1�→ [Sn−2 , SO(n − r)] i1∗
�→ [Sn−2 , SO(n)]p1∗�→
Die Behauptung ist formal analog zu (3.4.31), deren Herleitung läßt sich für einen Be-weis auch direkt übertragen, indem man dort p durch p1 ersetzt und beachtet, daß j ∶SO(n)/SO(n − r) �→ BSO(n − r) gerade die klassifizierende Abbildung des Bündelsp1 ist (siehe die Bemerkung am Ende des Abschnitts über Gauß-Abbildungen II).
Gauß-Abbildungen und π∗s -Thom-Klassen. Die nächsten Übersetzungsschritte fas-sen wir in folgendem Satz zusammen:
Satz 9.4.4. Die Gauß-Abbildung gξ ∶ Sn−1 �→ Vr(Rn) einer (n − r)-dimensionalen
Bündelreduktion ξn−r von τSn−1 mit p ○ gξ ≃ idSn−1 liefert für n ≥ 2r durch bildseitigeFaktorisierung über Pn−1(R)/Pn−r−1(R) ⊂ Vr(R
n) und S-Dualität eine π∗s -Thom-Klasseeines Negativs des Bündels n ⋅ λRr−1 über Pr−1(R) und umgekehrt.
Beweis. 1. Reduktion auf projektive RäumeGegeben sei ein Schnitt g(1) = gξ ∶ Sn−1 �→ Vr(R
n) ≅ SO(n)/SO(n − r) der Projektionp ∶ Vr(R
n) �→ V1(Rn). Die von der Spiegelungsabbildung induzierte Abbildung
Rn ,r ∶ Pn−1(R)/Pn−r−1(R) �→ SO(n)/SO(n − r)
ist nach (6.2.18) eine (2n − 2r)-Äquivalenz, d.h. für n − 1 ≤ 2n − 2r ist
Rn ,r∗ ∶ [Sn−1 , Pn−1(R)/Pn−r−1(R)] �→ [Sn−1 , SO(n)/SO(n − r)]

542 9 Vektorbündel im metastabilen Bereich
surjektiv und es gibt eine Abbildung g(2) ∶ Sn−1 �→ Pn−1(R)/Pn−r−1(R) mit Rn ,r ○ g(2) ≃g(1) . Ist q ∶ Pn−1(R)/Pn−r−1(R) �→ Pn−1(R)/Pn−2(R) ≅ Sn−1 die übliche Projektion auf dieoberste Zelle, so folgt aus der Natürlichkeit der Spiegelungsabbildung die Kommutativitätvon
Pn−1(R)/Pn−r−1(R)q�→ Pn−1(R)/Pn−2(R)
↓ Rn ,r ≅ ↓ Rn ,1
SO(n)/SO(n − r)p�→ SO(n)/SO(n − 1)
also q ○ g(2) ≃ idSn−1 . Umgekehrt liefert ein solches g(2) mit q ○ g(2) ≃ idSn−1 unter Verwen-dung der Homotopiehochhebungseigenschaft von p einen Schnitt g(1) von p zurück.Die Metastabilitätsbedingung 2r− 1 ≤ n ist hier unwesentlich, sie läßt sich umgehen, entwe-der wie weiter unten für n = 16 erklärt oder durch Konstruktion einer Abbildung
[X , SO(n)/SO(n − r)] �→ {X , Pn−1(R)/Pn−r−1(R)},
die auf X = Pn−1(R)/Pn−r−1(R) für Rn ,r die Einhängung der Identität liefert ([Cra80,2.7]). Im nächsten Schritt wird nämlich nur die durch g(2) definierte stabile Abbildungin {Sn−1 , Pn−1(R)/Pn−r−1(R)} benötigt.2. S-DualitätWir schreiben Pn−1(R)/Pn−r−1(R) als Thom-Raum Pn−1(R)/Pn−r−1(R) ≅ Pr−1(R)(n−r)λ
Rr−1
und gehen aus von der Situation
Sn−1 g(2)�→ Pr−1(R)(n−r)λ
Rr−1
q�→ Sn−1
mit q ○ g(2) ≃ idSn−1 . Es sei α ein a-dimensionales Negativ von n ⋅ λ, [α]s = −[n ⋅ λ]s inSVektR(Pr−1(R))
α ⊕ n ⋅ λ ≅ Ra+n .
Dann ist der Thom-Raum Pr−1(R)α (n + a − 1)-dual zu Pr−1(R)(n−r)λRr−1 (6.1.30) und obige
Sequenz liefert unter S-Dualität nach Einhängungen die Sequenz
Sa D(g(2))←� Pr−1(R)α
D(q)←� Sa
mit g(3) ∶= D(g(2)). Unter Verwendung der Isomorphismen
{Pr−1(R)(n−r)λRr−1 , Sn−1}
D≅ {Sa , Pr−1(R)α} ≅ Ha(Pr−1(R)α ;Z) ≅ Z
überzeugt man sich zunächst, daß D(q) ein Erzeugendes dieser Gruppe ist, und damit ho-motop zur Abbildung i ∶ Sa = M(Ra) �→ M(α), die von der Inklusion einer Faser indu-ziert wird, seinmuß.Weiter folgt, etwamit Natürlichkeitseigenschaften der S-Dualität, daßg(3) ○D(q) ≃ idSa gilt. Dies bedeutet, daß g(3) eineThom-Klasse für α in stabiler Kohomo-topie ist.Umgekehrt ergibt eine π∗s -Thom-Klasse von α unter S-Dualität eine stabile Abbildung in{Sn−1 , Pr−1(R)(n−r)λ}, die sich für 2r ≤ n über den Einhängungssatz zu einer echten Ab-bildung g(2) ∶ Sn−1 �→ Pr−1(R)(n−r)λ mit den entsprechenden Eigenschaften aushängenläßt.

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 543
Die Metastabilitätsbedingung und der Vektorfeldsatz. Die Voraussetzung 2r ≤ nim letzten Satz ist die Metastabilitätsbedingung. Für das Vektorfeld-Problem ist sie fast im-mer erfüllt:
Lemma 9.4.5. Für r ≤ ρ(n) + ε, ε = 0, 1, n ≠ 16 (und ≠ 2, 4, 8) gilt 2r ≤ n.
Beweis. Mit der Beschreibung der Funktion ρ als ρ(n) = γ(ν2(n)) aus (3.3.22) reduziertsich die Bedingung 2(ρ(n) + 1) ≤ n auf die 3 Ungleichungen
4ν2(n) + 2 ≤ n für ν2(n) ≡ 1, 2 mod 44ν2(n) + 4 ≤ n für ν2(n) ≡ 0 mod 44ν2(n) + 6 ≤ n für ν2(n) ≡ 3 mod 4
,
die, wie man leicht nachrechnet, bis auf die angegebenen Ausnahmen immer erfüllt sind.
Korollar 9.4.6. Sn−1 hat höchstens ρ(n) − 1 orthogonale Vektorfelder.
Beweis. Wirwollen dieAnnahme, daß es ρ(n)Vektorfelder auf Sn−1 gibt zumWiderspruchführen. Dazu setzen wir r = ρ(n) + 1 im letzten Satz. Bis auf n = 2, 4, 8, die sowieso klarsind, ist nur für n = 16 Metastabiltätsbedingung 2(ρ(n) + 1) ≤ n nicht erfüllt. DiesenFall behandelt man extra, etwa wie in [Gra75, 29.25]. Damit können wir den letzten Satzanwenden mit der Folgerung, daß ein Negativ α zu nλRρ(n) eine π∗s -Thom-Klasse besitzt.Aus (6.3.9) folgt jetzt, daß mit α auch nλRρ(n) stabil faserhomotopietrivial sein muß. WegenJ(Pρ(n)(R)) ≅ SVektR(Pρ(n)(R)) gilt dann auch n ⋅ [λRρ(n)]s = 0 und damit n ≡ 0 mod2ϕ(ρ(n)). Aus (7.3.4)
n ≡ 0 mod 2ϕ(s) ⇐⇒ s ≤ ρ(n) − 1
folgt dann der gesuchte Widerspruch.
DieAbbildungTr−1n−1 . ObigeUmformulierungen desVektorfeld-Problems sind imWe-
sentlichen Äquivalenzen. Wir formalisieren nun diese Überlegungen, indem wir die Über-setzung durch eine Abbildung beschreiben. Dadurch lassen sich die Beziehungen zwischenπ∗s -Thom-Klassen und Vektorfeldern auf Sn−1 genauer beschreiben und in einem gewissenUmfang auch Elemente in STn−r(Sn−1) konstruieren.
Dazu sei α ein a-dimensionales Negativ von n ⋅ λ, das wir zunächst auf Ps = Ps(R)mit genügend großem s wählen und dann auf Pr−1 einschränken. Durch die Kompositionfolgender, im Beweis zu (9.4.4) erläuterten Homomorphismen
{Pαr−1 , Sa}
D≅ {Sn−1 , P(n−r)λr−1 } ≅ {Sn−1 , Pn−1/Pn−r−1}
σ∞
←� [Sn−1 , Pn−1/Pn−r−1]Rn ,r∗�→ [Sn−1 , SO(n)/SO(n − r)] ∂1
�→ [Sn−2 , SO(n − r)]

544 9 Vektorbündel im metastabilen Bereich
wird für 2r < n eine Abbildung
Tr−1n−1 ∶ {Pα
r−1 , Sa} �→ STn−r(Sn−1) ⊂ πn−2(SO(n − r)) (9.4.7)
definiert, denn dann ist σ∞ bijektiv. Hier ist D der durch die S-Dualität zwischen Pr−1(R)α
und Pr−1(R)(n−r)λRr−1 induzierte Isomorphismus. Bis auf diesen Isomorphismus sind alle
Abbildungen in der Definition von Tr−1n−1 explizit gegeben. Die genaue Wahl der S-Dualität
lassen wir offen, für den Beweis des Vektorfeldsatzes spielt diese keine Rolle, wohl aber fürdie mittels Tr−1
n−1 konstruierten Elemente in STn−r(Sn−1). Die Abbildung Tr−1n−1 ist immer sur-
jektiv, da jedes stabil triviale Bündel eineGauß-Abbildung besitzt, aber nicht immer injektiv,da die Wahl der Gauß-Abbildung unter den gegebenen Dimensionsvoraussetzungen nichteindeutig sein muß. Auf den Kern von Tr−1
n−1 gehen wir später ein.Oben haben wir gesehen, daß das Bild einer π∗s -Thom-Klasse u ∈ {Pα
r−1 , Sa} unter Tr−1n−1
eine (n− r)-dimensionale Bündelreduktion ξ = (τSn−1)⟨−r+1⟩ von τSn−1 ist, d.h. es wurdenr − 1 Vektorfelder aus τSn−1 abgespalten:
(τSn−1)⟨−r+1⟩ = Tr−1n−1(u).
Die hierzu gehörende Gauß-Abbildung ist ein Schnitt von p ∶ Vr(Rn) → V1(R
n) = Sn−1 .Umgekehrt sind die Urbilder unter Tr−1
n−1 einer (n − r)-dimensionalen Bündelreduktion ξvon τSn−1 , deren Gauß-Abbildung einen Schnitt von p ergeben, immer π∗s -Thom-Klassenvon α. Die möglichenWahlen für π∗s -Thom-Klassen von α und damit für gξ werden durchdie nichttriviale Gruppe π0
s (Pr−1) parametrisiert. Jede Bündeltrivialisierung θ ∶ α → Ra
von α definiert auf offensichtliche Weise eine π∗s -Thom-Klasse u(θ) von α, die wir kurz “li-neare”Thom-Klasse nennen. Die Bündeltrivialisierungen von α werden durch KO−1(Pr−1)parametrisiert.
Solange n ⋅ λr−1 und damit α trivial sind, hat man einen Thom-Isomorphismusπas (Pα
r−1) ≅ π0s ((Pr−1)+) und etwa über den J-Homomorphismus J ∶ [Pr−1 , SO] �→
π0s (Pr−1) auch Zugriff auf weitere Elemente in πa
s (Pαr−1), die dann unter Tr−1
n−1 Elementein STn−r(Sn−1) definieren. Wir werden allerdings später sehen, daß solche über den J-Homomorphismus konstruierten Elemente neben Bündelreduktionen von Vielfachen vonτSn−1 nur sehr eingeschränkt weitere interessante stabil triviale Bündel liefern.
Clifford-Vektorfelder. Der Zusammenhang mit Clifford-Multiplikationen ist wiefolgt: Diese liefern auf zwei Arten Eingangsdaten für die Übersetzung Tr−1
n−1. Am einfachstengeht man dazu von einer nichtsingulären Bilinearform
β ∶ Rr × Rn �→ Rn (9.4.8)
aus, die wie in (2.3.6) angedeutet durch die Clifford-Algebren Konstruktion für r ≤ ρ(n)direkt gegeben wird. Wie bereits in (2.3.2) beschrieben, definiert β sowohl eine Trivialisie-rung β ∶ Rn → nλRr−1 , wie auch r − 1 Vektorfelder auf Sn−1 mit einer zugehörigen Bündel-reduktion ξ′ von τSn−1. Das ist der übliche Weg “Clifford-Vektorfelder” zu konstruieren.Die durch ξ′ gegebenen π∗s -Thom-Klassen in (Tr−1
n−1)−1([ξ′]) von α sind zunächst nur stabi-
le Faserhomotopietrivialisierungen von α und nicht notwendigerweise durch eine Bündel-trivialisierung gegeben. Man kann jedoch auch umgekehrt vorgehen. Verwendet man die

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 545
durch θ = β ⊕ idα ∶ Rn ⊕ α �→ nλRr−1 ⊕ α ≅ Pr−1 × Rn+a gegebene explizite stabile Tri-
vialisierung von α zur Definition einer π∗s -Thom-Klasse u(θ) ∈ {Pαr−1 , Sa}, so erhält man
durch [ξ] ∶= Tr−1n−1(u(θ)) eine Bündelreduktion ξ von τSn−1 mit ebenfalls besonderen Ei-
genschaften. Weiter unten werden wir nämlich zeigen, daß das Schnitthindernis e′(ξ) füreinen weiteren Schnitt in einer solchen Bündelreduktion, also ein weiteres Vektorfeld aufSn−1, im Bild des J-Homomorphismus liegt. Dies ist ein altes Resultat von Toda mit vielenAnwendungen.
Während die direkt durch β gegebenen Vektorfelder linear in dem Sinne sind, daß diezugehörige Gauß-Abbildung gξ′ die Einschränkung einer linearen Abbildung ist, muß diesfür die Gauß-Abbildung gξ von ξ nicht zutreffen. Aus dem Beweis zu (9.4.4) erhält man kei-ne Aussage in welcher Beziehung ξ und ξ′ für gleiches β stehen. Dies liegt natürlich an derfehlenden Festlegung der S-Dualitätsabbildung in derDefinition von Tr−1
n−1. Es sei hierzu nurbemerkt, daß man die Bilinearform β auch zur Konstruktion einer S-Dualitätsabbildungheranziehen kann, siehe etwa [Jam76, §7]. Unsere Strategie ist jedoch eine Vermeidung ei-nes genaueren Eingehens auf die verwendete S-Dualität.
Das komplexeVektorfeld-Problem. Wie bereits angedeutet, erscheint imReellen dieÜbersetzungsrichtung “Thom-Klasse auf Vektorfelder” zunächst wenig interessant, da einealgebraische Konstruktion für die Vektorfelder vorliegt. Das komplexe Vektorfeld-Problemist die Frage nach der maximalen Anzahl komplex-linear unabhängiger Schnitte im Vektor-bündel π∗(τPn(C)) über S2n+1 (siehe (3.3.36)). Alle im Reellen gemachten Übersetzungenbesitzen komplexe Analoga, man verwendet, daß die komplexe Spiegelungsabbildung RC
neine (4k + 4)-Äquivalenz
R ∶ P∞(C) ∧ S1/Pk−1(C) ∧ S1 → U/U(k)
induziert und - da hier J(Pm(C)) von SVektC(Pm(C)) verschieden ist - die Funktion bmaus (7.2.12) für die Ordnung von J(λCm), ansonsten verläuft die Übertragung ins Komplexevöllig analog. Hier wird jedoch die Rückrichtung von einer durch eine Faserhomotopietri-vialisierung von bm ⋅ λCm gegebenen Thom-Klasse auf die Existenz von Vektorfeldern inter-essant, da bis heute im Komplexen keine algebraische Konstruktion von Schnitten wie imReellen für τSn−1 bekannt ist ([MPS80]).
9.4.2 Das Vektorfeld-Problem für π-Mannigfaltigkeiten
Vor der weiteren Untersuchung der Gauß-Abbildungen der Bündelreduktionen (τSn)⟨−k⟩
besprechen wir das Vektorfeld-Problem für π-Mannigfaltigkeiten, dessen Lösung ebenfallsauf der Verwendung von Gauß-Abbildungen beruht.
Definition 9.4.9. Eine C∞-Mannigfaltigkeit M heißt stabil-parallelisierbar oder π-Mannigfaltigkeit, genau dann, wenn das Tangentialbündel von M stabil trivial ist.

546 9 Vektorbündel im metastabilen Bereich
Im Folgenden sei Mn eine n-dimensionale, zusammenhängende, kompakte π-Mannigfaltigkeit ohne Rand, dann gilt insbesondere Hn(M;Z) ≅ Z. Mit q ∶ M → Sn
bezeichnen wir wieder die kanonische Abbildung M → M/M − D ≅ Dn/Sn ≅ Sn aus[M , Sn], deren Bild unter der Hurewicz-Abbildung die Gruppe Hn(M;Z) erzeugt.
Ziel dieses Abschnitts ist die Klärung der Frage, wie viele linear unabhängige Vektor-felder M besitzt: Die Antwort liefert folgender Satz von Thomas, Bredon und Kosinski[Tho66], [BrK66]]:
Satz 9.4.10. Es sei Mn eine π-Mannigfaltigkeit wie oben und n ≥ 9. Dann besitzt M ent-weder genauso viele linear unabhängige Vektorfelder wie Sn oder M ist parallelisierbar.
Ist n gerade, so ist nach (5.3.7) τM trivial, genau dann, wenn die Euler-Klasse e(τM)verschwindet, im Fall [τM] ≠ 0 besitzt also M keine nullstellenfreien Vektorfelder und dieAussage des Satzes ist bewiesen. Ab jetzt sei n ungerade und es gelte n ≥ 9. Da aus [τM]s = 0bereits τM ⊕ R ≅ Rn+1 folgt, wissen wir nach (5.1.10), daß es dann ein [ f ] ∈ [M , Sn] mitτM ≅ f ∗(τSn) gibt und τM hatmindestens so viele Vektorfelder wie τSn . Im Fall [τM] ≠ 0können wir zudem f ≃ q voraussetzen, denn 2q liegt im Bild von p∗ ∶ [M , SO(n + 1)] →[M , Sn], woraus [ f ∗(τSn)] = 0 folgt, falls f durch 2 teilbar ist. Die Hauptarbeit im Beweisdes Satzes liegt also in der Herleitung, daß M nicht mehr Vektorfelder als Sn zuläßt, fallsτM nicht schon trivial ist.
Nach (5.3.8) gilt für die stabil-trivialen n-dimensionalen Bündel überMn für n ungera-de
STn(Mn) ≅ Hn+1(ΣM;Z/2)/wn+1[ΣM , BSO] = { Z/2 falls Bild(wn+1) = 00 falls Bild(wn+1) ≠ 0.
Setzen wir also [τM] ≠ 0 voraus, so folgt automatisch STn(Mn) ≅ Z/2. Unabhängig davonkann man zeigen, - siehe Abschnittsende - daß, ähnlich wie für Sphären ab n ≥ 9 auchSTn(Mn) ≠ 0 gilt, und es damit ein n-dimensionales Bündel μn mit [μn] ≠ 0, [μn]s = 0überM immer gibt. Ob dann τM isomorph zu diesem Bündel ist, bzw. [τM] ≠ 0 gilt, wirdvon der Kervaire-Semicharakteristik von M entschieden, siehe [BrK66]. Wir werden imFolgenden mit der Situation [μn] ≠ 0, [μn]s = 0 arbeiten.
Die entscheidende Eigenschaft einer π-Mannigfaltigkeit, die im Beweis eingeht, ist, daßdie oberste Zelle von M stabil abspaltet, siehe (6.1.31). Im Folgenden sei also r ∈ {Sn ,M}eine stabile Abbildung, die durch r ∶ Sn+m → ΣmM fürm genügend groß repräsentiert wirdund die Σmq ○ r ≃ idSn+m erfüllt.
Der Beweis wäre trivial, wenn es eine solcheAbbildung rmitm = 0 gäbe, denn dann hät-te man τSn ≅ r∗(τM) und τSn hätte mindestens soviele Schnitte wie τM . Die Beweisstra-tegie ist es nun, durch Übergang von den Bündeln zu den zugehörigen Gauß-Abbildungenin eine stabile Situation zu gelangen, in der dann die stabile Abbildung r eingesetzt werdenkann. Wir beginnen mit

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 547
Lemma 9.4.11. Für n = dim(M) ≤ 2k − 1 ist die Einhängungsabbildung
σ∞ ∶ [M , SO/SO(k)] → {M , SO/SO(k)} surjektiv.
Beweis. Nach (6.2.14) ist SO/SO(k) ein (k − 1)-zusammenhängender Raum. Aus dem all-gemeinen Freudenthalschen Einhängungssatz (6.1.7) folgt dann die Behauptung.
Zum Beweis von (9.4.10) gehen wir von folgender Situation aus: Es seien Mn , q ∶ M →
Sn , r ∶ Sn+m �→ ΣmM mit Σmq ○ r ≃ idSn+m wie oben und ein n-dimensionales Bündel μmit [μ] /= 0, [μ]s = 0 gegeben. Wir nehmen an, daß μ aufspaltet in
μ ≅ ξk ⊕ Rn−k mit n ≤ 2k − 1 (9.4.12)
und verwenden den Ansatz wie in (9.4.1) mit Mn anstelle von Sn und SO statt SO(n + 1),d.h. wir arbeiten jetzt mit stabilen Gauß-Abbildungen:
SO/SO(k) SO/SO(n)
M BSO(k) BSO(n)
��ı
��
j
��
jn
��f ξ
��������������
gξ
��Bin
(9.4.13)
Hier ist fξ die klassifizierende Abbildung von ξ und fμ = Bin ○ fξ die von μ. Wir könneneine Gauß-Abbildung gξ mit j ○ gξ ≃ fξ und [ı ○ gξ] /= 0 in [Mn , SO/SO(n)] ≅ STn(Mn) ≅
Z/2 wählen. Es gilt jn∗[ı ○ gξ] = [ fμ] /= 0 in [Mn , BSO(n)]. Durch die Verwendung vonSO/SO(n) statt SO(n + 1)/SO(n) entfällt die Unbestimmtheit bei der Gauß-Abbildunggμ ≃ ı ○ gξ und später bei gτSn .
Die rechte Hälfte des kommutativen Diagramms
[Mn , SO/SO(n)] σ∞
�→≅
{Mn , SO/SO(n)} ≅ Z/2↑ ı∗
↑ ı∗
[Mn , SO/SO(k)] σ∞
�→ {Mn , SO/SO(k)}
können wir mit der stabilen Abbildung r (siehe (6.1.9)) in die rechte Hälfte von
[Sn , SO/SO(n)] σ∞
�→≅
{Sn , SO/SO(n)} ≅ Z/2↑ ı∗
↑ ı∗
[Sn , SO/SO(k)] σ∞
�→ {Sn , SO/SO(k)}
abbilden. Definiere g ∶= σ−1∞⋅ r! ⋅ σ∞ ○ gξ ∶ Sn → SO/SO(k). Wir zeigen nun, daß g eine
Gauß-Abbildung für τSn ist.

548 9 Vektorbündel im metastabilen Bereich
Dazu genügt es, ı∗[g] ≠ 0 in [Sn , SO/SO(n)] ≅ Z/2 nachzuweisen, die Behauptungfolgt dann aus dem Diagramm (9.4.13) mit Sn anstelle von M. Nun gilt ı∗[g] ≠ 0⇔ σ∞ ○ı∗[g] /= 0 und man rechnet
σ∞ ○ ı∗[g] = ı∗ ○ σ∞[g] = ı∗ ○ r! ○ σ∞[gξ] = r! ○ ı∗ ○ σ∞[gξ] = r! ○ σ∞ ○ ı∗[gξ].
Aber auf {M , SO/SO(n)} ist r! = (q∗)−1 bijektiv. Da außerdem σ∞ ∶ [M , SO/SO(n)] →{M , SO/SO(n)} bijektiv ist, folgt die Behauptung aus ı∗([gξ]) /= 0. Damit folgt aus (9.4.12),daß τSn ebenfalls (n− k)-Vektorfelder besitzt. Um den Beweis von (9.4.10) zu Ende zu füh-ren,muß nur dieMetastabilitätsbedingung n ≤ 2k−1 hergeleitet werden, denn immerwenndiese gilt, hat τSn mindestens so viele Vektorfelder wie μ. Die umgekehrte Beziehung gilt jaohne Einschränkung. Nur für die Abschätzung n ≤ 2k−1 benötigen wir also die Lösung desVektorfeld-Problems auf Sn . Die Verifizierung der Metastabilitätsbedingung wurde bereitsin (9.4.5) durchgeführt. Unter Verwendung der Lösung des Vektorfeld-Problems für Sn istdamit (9.4.10) bewiesen, außer für n = 15, wo zusätzliche Überlegungen nötig sind, die wiraber übergehen.
Bemerkung. Verwendet man die Abschätzung aus [StW51] (für n + 1 = (2a + 1)2t hat Sn
höchstens 2t−1 Vektorfelder), so erhält man die Ungleichung n ≤ 2k − 1 für alle n mit a ≥ 1.
Zum Schluß gehen wir noch kurz auf die Berechnung von STn(Mn) für eine π-Mannigfaltigkeit ein:
Lemma 9.4.14. Es sei n ≥ 9 ungerade und Mn eine n-dimensionale π-Mannigfaltigkeitwie oben. Dann gilt STn(Mn) ≅ Z/2.
Beweis. Nach (5.3.8) müssen wir zeigen, daß wn+1 ∶ [ΣM , BSO] → Hn+1(ΣM;Z/2) trivialist.
Der usprüngliche Beweis von Milnor aus [Mil58] für das Verschwinden von wn+1 auf[Sn , SO] für n ≥ 9 läßt sichmodifizieren und übertragen. Alternativ kannman die in (6.4.5)hergeleitete Methode heranziehen. In dem damit hergeleiteten kommutativen Diagramm(7.3.21)
[M , SO(n)] �→ [M , SO] �→ [M , SO/SO(n)]↓ J ↓ J ↓ J
[ΣnM , Sn]σ∞
�→ π0s (M)
pF∗�→ [M , SF/SF(n)]
ist J ein Isomorphismus für dimM < 2n − 2. Deshalb reicht es zu zeigen, daß σ∞ surjektivist. Die stabile Abbildung r aus dem Lemma (6.1.31) ist durch eine echte Abbildung rn ∶S2n → ΣnM repräsentierbar ((6.1.7), ΣnM ist n-zusammenhängend). Mit i ∶ Mn−1 ↪ M alsInklusion des n-Skeletts ist es leicht zu sehen, daß
S2n ∨ ΣnMn−1 rn∨Σn i�→ ΣnM ∨ ΣnM → ΣnM
eine Homotopieäquivalenz ist. Nun ist σ∞ surjektiv auf S2n für n ≥ 9 und auf ΣnMn−1 giltdies aus Dimensionsgründen.

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 549
Bemerkung. Setzt man für die π-Mannigfaltigkeit M z.B. zusätzlich π1(M) = 0 voraus,kann man r bereits auf S2n−3 realisieren und erhält eine Spaltung Σn−3M ≃ S2n−3 ∨Σn−3Mn−2 . Mit dieser folgt dann das Verschwinden der Abbildung p∗ ∶ [M , SO] �→[M , SO/SO(n − 1)], womit man dann STn−1(M) ≅ STn−1(Sn) berechnet hat.
9.4.3 Die Stabilisierungssequenz für stabil triviale Bündel
Im metastabilen Bereich läßt sich die Stabilisierungssequenz für Sphären auf stabil trivia-le Bündel einschränken und dann in exakte Sequenzen von stabilen HomotopiegruppenQuotienten projektiver Räume oder Kohomotopiegruppen vonThom-Räumen übersetzenund so wie angekündigt ganz in den stabilen Bereich transformieren. Die wichtigste An-wendung hiervon ist der Beweis des Satzes von Toda (9.4.29) im nächsten Abschnitt unddie Untersuchung dieser Sequenzen mit K-Theorie im letzten Kapitel.
Die aus dem Satz von Barratt-Mahowald folgende Beschreibung der stabil trivialen Bün-del auf Sn , nämlich
+Vektn−rR (Sn) ≅ SVektR(Sn) ⊕ STn−r(Sn)
≅ ≅ ≅
πn−1(SO(n − r)) ≅ πn−1(SO) ⊕ πn(SO/SO(n − r))
erlaubt es, imGültigkeitsbereich dieserAussage die Stabilisierungssequenz auf stabil trivialeBündel einzuschränken.:
πn(Sn−r−1) πn−1(SO(n − r − 1)) πn−1(SO(n − r)) πn−1(Sn−r−1)
∪ ∪
STn−r−1(Sn) STn−r(Sn)
��△
�����������
��i⊕
��p∗
��
��
�����������
Wir erhalten als unmittelbares Korollar von (9.1.1):
Korollar 9.4.15. Für 2r < n − 3 und n − r − 1 ≥ 13 ist die auf stabil triviale Bündeleingeschränkte Stabilisierungssequenz exakt:
→ πn(Sn−r−1)△
�→ STn−r−1(Sn)i⊕
�→ STn−r(Sn)p∗
�→ πn−1(Sn−r−1) →
Beweis. Dies folgt direkt aus den Eigenschaften der involvierten Homomorphismen. Nuran der Stelle πn−1(Sn−r−1) wird (9.1.1) benötigt, wenn man zeigen muß, daß es für ein αaus πn−1(Sn−r−1) mit △(α) = 0 ein stabil triviales Bündel ξ mit p∗([ξ]) = α gibt. Daπn−1(SO(n − r − 1)) → πn−1(SO) für 2r < n − 3 surjektiv ist, kann man ein zunächstbeliebig gewähltes Urbild von α aber geeignet abändern.
Die Übersetzung von (9.4.15) in eine exakte Sequenz stabiler Homotopiegruppen folgtdemMuster von (9.4.4), die zusätzliche Arbeit besteht in der Übertragung der betroffenen

550 9 Vektorbündel im metastabilen Bereich
Abbildungen. Wir setzen k ∶= n − r − 1 und m = n + 1 oder m = n + 2. Mit m = n + 1arbeitet man mit instabilen Gauß-Abbildungen wie im vorletzten Abschnitt oder bei derDefinition von Tr
n , mit m = n + 2 erhält man stabile Gauß-Abbildungen. Beide Versionenwerden später benötigt. Eine Übersicht gibt folgendes Diagramm, dessen Kommutativitätwir schrittweise nachweisen:
→ πn(Sn−r−1)△
�→ STn−r−1(Sn)i⊕
�→ STn−r(Sn)p∗
�→ πn−1(Sn−r−1) →
∥ (C1) ↑ ∂2 (B1) ↑ ∂1 (A1) ∥
πn(Sk)i2∗�→ πn(SO(m)/SO(k))
p3∗�→ πn(SO(m)/SO(k+1))
∂3�→ πn−1(Sk) →
∥ (C2) ↑ Rm ,m−k∗ (B2) ↑ Rm ,m−k−1∗ (A2) ↓ σ
πn(Sk)i5∗�→ πn(Pm−1
k )p5∗�→ πn(Pm−1
k+1 )∂5�→ πn(Sk+1) →
↓ σ∞
↓ σ∞
↓ σ∞
↓ σ∞
πsn(Pk/Pk−1)
i5∗�→ πs
n(Pm−1k )
p5∗�→ πs
n(Pm−1k+1 )
∂5�→ πs
n−1(Sk)(9.4.16)
1. Schritt: Übersetzung in Gauß-Abbildungen. Zuerst interpretieren wir die einge-schränkte Stabilisierungssequenz als exakte Sequenz einer Faserung. Diese wird vom Faser-bündel
Sk = SO(k + 1)/SO(k) i3�→ SO(m)/S(k)
p3�→ SO(m)/SO(k + 1) =∶ B
geliefert (hieraus folgt natürlich mit (9.1.1) ebenfalls die Exaktheit der eingeschränkten Se-quenz). Die zu den Faserbündeln
SO(k + 1) i1�→ SO(m)
p1�→ SO(m)/SO(k + 1)
SO(k) i2�→ SO(m)
p2�→ SO(m)/SO(k)
SO(k) i�→ SO(k + 1)
p�→ SO(k + 1)/SO(k) = Sk
gehörenden Randoperatoren bezeichnen wir mit ∂1 , ∂2 und ∂ = △, wobei p natürlich dieStabilisierungssequenz induziert. Wir bilden jetzt die iterierte Fasersequenz von p3 mittelsder Randoperatoren ∂i in diejenige von p ab und erhalten folgendes Diagramm und damitdie obersten zwei Zeilen von (9.4.16):
πn(Sk)△
�→ πn−1(SO(k))i⊕
�→ πn−1(SO(k + 1))p∗
�→ πn−1(Sk) →
∥ (C1) ↑ ∂2 (B1) ↑ ∂1 (A1) ∥
πn(Sk)i2∗�→ πn(SO(m)/SO(k))
p3∗�→ πn(SO(m)/SO(k + 1))
∂3�→ πn−1(Sk) →
(9.4.17)Wir überzeugen uns nun von der Kommutativität dieses Diagramms, es handelt sich da-bei lediglich um elementares Umformen von Fasersequenzen (Stichwort: Oktaederaxiom).Setzt man das aus p1 = p3 ○ p2 resultierende kommutative Quadrat (Q) nach links durchdie iterierten Fasersequenzen von p1 und p2 fort, erhält man die homotopiekommutativeLeiter
ΩB ∂3�→ SO(k + 1)/SO(k) �→ SO(m)/SO(k)
p3�→ B
∥ (A1) ↑ p ↑ p2 (Q) ∥
ΩB ∂1�→ SO(k + 1) i1
�→ SO(m)p1�→ B

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 551
und damit die Kommutativität von (A1). Die Kommutativität von (B1) folgt direkt aus derNatürlichkeit des Randoperators und die von (C1) ergibt sich aus der homotopiekommuta-tiven Leiter
ΩSk ∂�→ SO(k) �→ SO(k + 1)
p�→ SO(k + 1)/SO(k)
↓ Ω i3 ∥ ↓ i1 ↓ i3
ΩSO(m)/SO(k) ∂1�→ SO(k) i1
�→ SO(m)p1�→ SO(m)/SO(k)
,
die man durch Einschränken der Faserung p2 längs i3 erhält.Aus dem kommutativen Quadrat (A1) in (9.4.17) und (9.4.3) erhält man als Folgerung
p∗([cξ]) = ∂3([gξ]) für m = n + 1 bzw. p∗([cξ]) = ∂3([gstξ ]) für m = n + 2
d.h. das Hindernis für einen Schnitt in ξ, nämlich p∗([cξ]) = e′(ξ), wird durch das Erwei-terungshindernis für dessen instabiler bzw. stabiler Gauß-Abbildung beschrieben.
2. Schritt: Übersetzung in projektive Räume. Als nächstes wird die Faser-sequenz von p3 in die Kofaserfolge von Quotienten projektiver Räume übersetzt(Pa
k = Pa(R)/Pk−1(R)). Ziel ist die Herleitung des kommutativen Diagramms
πn(Sk)i2∗�→ πn(SO(m)/SO(k))
p3∗�→ πn(SO(m)/SO(k + 1))
∂3�→ πn−1(Sk) →
∥ (C2) ↑ Rm ,m−k∗ (B2) ↑ Rm ,m−k−1∗ (A2) ↓ σ
πn(Sk)i5∗�→ πn(P
m−1k )
p5∗�→ πn(P
m−1k+1 )
∂5�→ πn(Sk+1) →
(9.4.18)Die Kommutativität der Quadrate (B2) und (C2) folgt wieder direkt aus der Definition derverwendeten Spiegelungsabbildungen. Problematisch ist nur das Quadrat (A2), da hier derRandoperator einer Fasersequenz mit dem einer Kofasersequenz zu vergleichen ist. Diesgeschieht durch Rückgriff auf die Definitionen, was etwas langwierig ist, aber auch gutübergangen werden kann. Mittels (8.4.9) übersetzt man zunächst die exakte Sequenz derFaserung Sk �→ SO(m)/SO(k)
p3�→ SO(m)/SO(k + 1) in die exakte Sequenz des Paares
(SO(m)/SO(k), Sk) in dieman die Paarsequenz von (X , F) ∶= (Pm−1k , Sk)mittels der Spie-
gelungsabbildungen R∗ abbildet. Es bleibt der Vergleich des Randoperators dieses Paares(X , F) mit dem aus der Kofasersequenz von F ↪ X , im folgenden Diagramm handelt essich also um die beiden oberen Zeilen:
πi(F) → πi(X) → πi(X , F)∂4�→ πi−1(F)
∥ ∥ ↓ pr∗
↓ σ
πi(F) → πi(X) → πi(X/F , ∗)∂5�→ πi(ΣF)
↑ pr2∗ ↑ ≅
πi(X ∪ CF , ∗)pr3∗�→ πi(X ∪ CF/X)
.
Zur Beschreibung von ∂5 ersetzen wir X/F durch die homotopieäquivalente VereinigungX ∪ CF von X mit dem Kegel über F, dann wird ∂5 durch die Quotientenabbildung pr3 ∶X ∪CF → X ∪CF/X ≃ ΣF induziert, d.h. es gilt ∂5 = pr3∗ ○ (pr2∗)−1 . Wir verschaffen uns

552 9 Vektorbündel im metastabilen Bereich
zunächst geeignete Repräsentanten. Repräsentiertman x ∈ πi(X , F) durch g ∶ (Di , Si−1) →
(X , F), so ist ∂4(x) durch die Einschränkung g1 ∶= g∣S i−1 ∶ Si−1 → F gegeben: ∂4(x) = [g1].
Ein Repräsentant von pr∗(x) ist die Faktorisierung g2 ∶ Di/Si−1 → X/F von g , d.h. es giltpr ○ g ≃ g2 . Wir bezeichnen jetzt Di mit D+ und erweitern g durch Cg1 ∶ CSi−1 = D− → CFzu einer Abbildung g3 ∶ D+ ∪ D− → X ∪ CF. Der Quotient g3 dieser Abbildung den mannach Herausdividieren von D− und CF erhält
g3 ∶ (D+ ∪ D−)/D− �→ (X ∪ CF)/CF ≅ X/F
repäsentiert offensichtlich g2 , was nichts anderes heißt als pr2○ g3 ≃ g2 . Wegen g3(D+) ⊂ Xund D−/Si−1 ≃ (D+ ∪ D−)/D+ repräsentiert g3 aber auch die Einhängung von g1, denndie Faktorisierung g3 wird auch von Cg1 als D−/Si−1 → CF/F = ΣF induziert (je nachKonventionen bis auf ein Vorzeichen). Wir haben also pr3 ○ g3 ≃ Σg1. Geht man mit diesenRepräsentanten und den beschriebenen Relationen durch obiges Diagramm, folgt dessenKommutativität:
σ○∂4([g]) = σ([g1]) und ∂5○pr∗([g]) = ∂5([g2]) = ∂5○pr2∗([g3]) = pr3∗([g3]) = [Σg1].
Da die hierbei eingegangene Identifikationskette (i < 2k)
πi(SO(m)/SO(k + 1)) ≅ πi(SO(m)/SO(k), Sk) ≅ πi(X , F) ≅ πi(X/F)
mit Rm ,m−k−1∗ übereinstimmt, folgt schließlich die Kommutativität von (A2).
D+
D+
gg1
X
Fpr
D+/∂D+
g2X/F
F/F
D−
g
g1
Cg1
X
CF pr3
pr2
D+ ∪ D−/D+
∑ g1
X ∪ CF/XAbb. 9.1. Die Abbildungen zum Vergleich der Randoperatoren
Da die jeweiligen Einhängungsabbildungen σ∞ ∶ πi(Z) → πsi(Z) natürlich mit allen
Homomorphismen der unteren zwei Zeilen in (9.4.16) vertauschen, folgt schließlich dieKommutativität des ganzen Diagramms (9.4.16).
Wir betrachten jetzt zuerst den Fall stabiler Gauß-Abbildungen (m = n + 2). Für 2r <n − 4 (k = n − r − 1) sind die bildseitig eingeschränkten Randoperatoren aus (9.4.17)
∂1 ∶ πn(SO(n + 2)/SO(k + 1)) → STk+1(Sn) und ∂2 ∶ πn(SO(n + 2)/SO(k)) → STk(Sn)

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 553
bijektiv, gleiches gilt für die beiden Spiegelungsabbildungen Rn+2,n+2−k∗ und Rn+2,n+1−k∗in (9.4.18). Damit sind die beiden Abbildungen
Ξrn ∶ ST
n−r(Sn) �→ πsn(P
n+1n−r) und Ξr+1
n ∶ STn−r−1(Sn) �→ πsn(P
n+1n−r−1)
mit Ξrn ∶= σ∞○(Rn+2,r+2∗)
−1○∂−11 und analog für Ξr+1n definiert. Aus demoben hergeleiteten
kommutativen Diagramm (9.4.16) erhält man die Beschreibung der auf stabil triviale Bün-del eingeschränkten Stabilisierungssequenz für Sphären durch stabile Homotopiegruppen:
Satz 9.4.19. Für 2r < n−4 (und n−r−1 ≥ 13) ist die Stabilisierungssequenz für stabil tri-viale Bündel isomorph zur von der Kofasersequenz von p5 ∶ Pn+1/Pn−r−2 → Pn+1/Pn−r−1induzierten exakten Sequenz in stabiler Homotopie, genauer, folgendes Diagramm kom-mutiert
πn(Sn−r−1)△
�→ STn−r−1(Sn)i⊕
�→ STn−r(Sn)p∗
�→ πn−1(Sn−r−1) →
≅ ↓ σ∞
≅ ↓ Ξr+1n ≅ ↓ Ξr
n ≅ ↓ σ∞
πsn(P
n−r−1n−r−1)
i5∗�→ πs
n(Pn+1n−r−1)
p5∗�→ πs
n(Pn+1n−r)
∂5�→ πs
n−1(Sn−r−1)
.
Die Variante, die man mit instabilen Gauß-Abbildungen, also m = n + 1, erhält, for-mulieren wir erst später zusammen mit S-Dualität im nächsten Schritt. Da wir später K-Kohomologie und nicht K-Homologie zur Untersuchung dieser Sequenzen einsetzen wol-len, sind wir gezwungen, die stabile Homotopiezeile in (9.4.19) nochmit S-Dualität zu über-setzen.
3. Schritt: S-Dualität. Der Quotientenraum Pn+1/Pn−r−1 ist homöomorph zumThom-Raum P(n−r)λr+1 und dieser ist bis auf Einhängungen S-dual zum Thom-Raum Pβ
r+1,wobei β ein b-dimensionales Negativ von (n + 2)λr+2 ist. Die resultierende Identifikationπsn(Pn+1/Pn−r−1) ≅ πs
n(P(n−r)λr+1 ) ≅ {Pβ
r+1 , Sb+1} komponieren wir mit Ξrn und nennen die
sich damit für 2r < n − 2 ergebende Isomorphie Srn ∶
Srn ∶ ST
n−r(Sn)∂1←�≅
πn(SO(n + 2)/SO(n − r)) R∗
←�≅
πn(Pn+1n−r)
σ∞
�→≅
πsn(P
n+1n−r) ≅ πs
n(P(n−r)λr+1 )
D≅ {Pβ
r+1 , Sb+1}(9.4.20)
Aus dem Diagramm im letzten Satz wird dann für 2r < n − 4
πn(Sn−r−1)△
�→ STn−r−1(Sn)i⊕
�→ STn−r(Sn)p∗
�→ πn−1(Sn−r−1) →
≅ ↓ σ∞
≅ ↓ Sr+1n ≅ ↓ Sr
n ≅ ↓ σ∞
{Sr+2+b , Sb+1}D(i5)∗�→ {Pβ
r+2 , Sb+1}D(p5)∗�→ {Pβ
r+1 , Sb+1}D(∂5)∗�→ {Sr+b+1 , Sb+1}
(9.4.21)wobei sich die Kofasersequenz in der unteren Zeile sowie die Kommutativität des Dia-gramms aus der allgemeinen Eigenschaft der S-Dualität D, eine Kofasersequenz in einedazu duale zu übersetzen ergibt (6.1.26), (6.1.28).
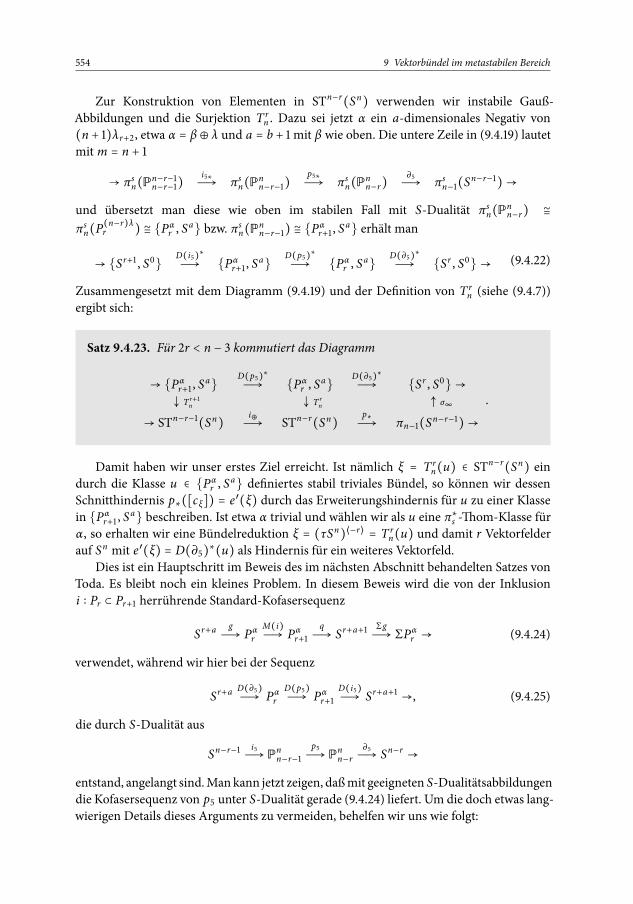
554 9 Vektorbündel im metastabilen Bereich
Zur Konstruktion von Elementen in STn−r(Sn) verwenden wir instabile Gauß-Abbildungen und die Surjektion Tr
n . Dazu sei jetzt α ein a-dimensionales Negativ von(n + 1)λr+2, etwa α = β⊕ λ und a = b + 1 mit β wie oben. Die untere Zeile in (9.4.19) lautetmit m = n + 1
→ πsn(P
n−r−1n−r−1)
i5∗�→ πs
n(Pnn−r−1)
p5∗�→ πs
n(Pnn−r)
∂5�→ πs
n−1(Sn−r−1) →
und übersetzt man diese wie oben im stabilen Fall mit S-Dualität πsn(P
nn−r) ≅
πsn(P(n−r)λr ) ≅ {Pα
r , Sa} bzw. πsn(P
nn−r−1) ≅ {Pα
r+1 , Sa} erhält man
→ {Sr+1 , S0}D(i5)∗�→ {Pα
r+1 , Sa}D(p5)∗�→ {Pα
r , Sa}D(∂5)∗�→ {Sr , S0} → (9.4.22)
Zusammengesetzt mit dem Diagramm (9.4.19) und der Definition von Trn (siehe (9.4.7))
ergibt sich:
Satz 9.4.23. Für 2r < n − 3 kommutiert das Diagramm
→ {Pαr+1 , Sa}
D(p5)∗�→ {Pα
r , Sa}D(∂5)∗�→ {Sr , S0} →
↓ Tr+1n ↓ Tr
n ↑ σ∞
→ STn−r−1(Sn)i⊕
�→ STn−r(Sn)p∗
�→ πn−1(Sn−r−1) →
.
Damit haben wir unser erstes Ziel erreicht. Ist nämlich ξ = Trn(u) ∈ STn−r(Sn) ein
durch die Klasse u ∈ {Pαr , Sa} definiertes stabil triviales Bündel, so können wir dessen
Schnitthindernis p∗([cξ]) = e′(ξ) durch das Erweiterungshindernis für u zu einer Klassein {Pα
r+1 , Sa} beschreiben. Ist etwa α trivial und wählen wir als u eine π∗s -Thom-Klasse fürα, so erhalten wir eine Bündelreduktion ξ = (τSn)⟨−r⟩ = Tr
n(u) und damit r Vektorfelderauf Sn mit e′(ξ) = D(∂5)∗(u) als Hindernis für ein weiteres Vektorfeld.
Dies ist ein Hauptschritt im Beweis des im nächsten Abschnitt behandelten Satzes vonToda. Es bleibt noch ein kleines Problem. In diesem Beweis wird die von der Inklusioni ∶ Pr ⊂ Pr+1 herrührende Standard-Kofasersequenz
Sr+a g�→ Pα
rM(i)�→ Pα
r+1q�→ Sr+a+1 Σg
�→ ΣPαr → (9.4.24)
verwendet, während wir hier bei der Sequenz
Sr+a D(∂5)�→ Pα
rD(p5)�→ Pα
r+1D(i5)�→ Sr+a+1 →, (9.4.25)
die durch S-Dualität aus
Sn−r−1 i5�→ Pn
n−r−1p5�→ Pn
n−r∂5�→ Sn−r →
entstand, angelangt sind.Mankann jetzt zeigen, daßmit geeigneten S-Dualitätsabbildungendie Kofasersequenz von p5 unter S-Dualität gerade (9.4.24) liefert. Um die doch etwas lang-wierigen Details dieses Arguments zu vermeiden, behelfen wir uns wie folgt:
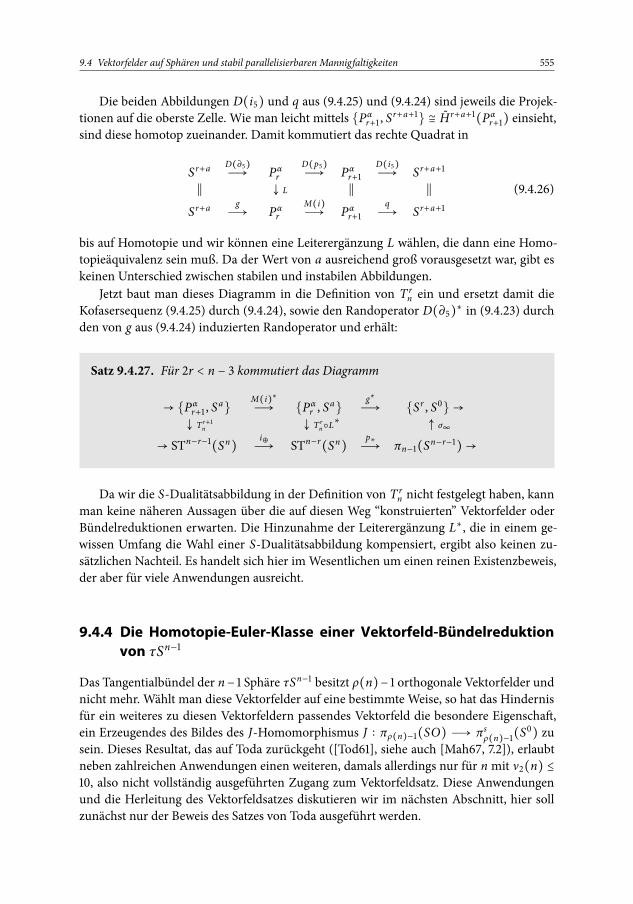
9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 555
Die beiden Abbildungen D(i5) und q aus (9.4.25) und (9.4.24) sind jeweils die Projek-tionen auf die oberste Zelle. Wie man leicht mittels {Pα
r+1 , Sr+a+1} ≅ Hr+a+1(Pαr+1) einsieht,
sind diese homotop zueinander. Damit kommutiert das rechte Quadrat in
Sr+a D(∂5)�→ Pα
rD(p5)�→ Pα
r+1D(i5)�→ Sr+a+1
∥ ↓ L ∥ ∥
Sr+a g�→ Pα
rM(i)�→ Pα
r+1q�→ Sr+a+1
(9.4.26)
bis auf Homotopie und wir können eine Leiterergänzung L wählen, die dann eine Homo-topieäquivalenz sein muß. Da der Wert von a ausreichend groß vorausgesetzt war, gibt eskeinen Unterschied zwischen stabilen und instabilen Abbildungen.
Jetzt baut man dieses Diagramm in die Definition von Trn ein und ersetzt damit die
Kofasersequenz (9.4.25) durch (9.4.24), sowie den Randoperator D(∂5)∗ in (9.4.23) durchden von g aus (9.4.24) induzierten Randoperator und erhält:
Satz 9.4.27. Für 2r < n − 3 kommutiert das Diagramm
→ {Pαr+1 , Sa}
M(i)∗�→ {Pα
r , Sa}g∗�→ {Sr , S0} →
↓ Tr+1n ↓ Tr
n○L∗ ↑ σ
∞
→ STn−r−1(Sn)i⊕
�→ STn−r(Sn)p∗
�→ πn−1(Sn−r−1) →
Da wir die S-Dualitätsabbildung in der Definition von Trn nicht festgelegt haben, kann
man keine näheren Aussagen über die auf diesen Weg “konstruierten” Vektorfelder oderBündelreduktionen erwarten. Die Hinzunahme der Leiterergänzung L∗, die in einem ge-wissen Umfang die Wahl einer S-Dualitätsabbildung kompensiert, ergibt also keinen zu-sätzlichen Nachteil. Es handelt sich hier imWesentlichen um einen reinen Existenzbeweis,der aber für viele Anwendungen ausreicht.
9.4.4 Die Homotopie-Euler-Klasse einer Vektorfeld-Bündelreduktionvon τSn−1
Das Tangentialbündel der n− 1 Sphäre τSn−1 besitzt ρ(n)− 1 orthogonale Vektorfelder undnicht mehr. Wählt man diese Vektorfelder auf eine bestimmte Weise, so hat das Hindernisfür ein weiteres zu diesen Vektorfeldern passendes Vektorfeld die besondere Eigenschaft,ein Erzeugendes des Bildes des J-Homomorphismus J ∶ πρ(n)−1(SO) �→ πs
ρ(n)−1(S0) zu
sein. Dieses Resultat, das auf Toda zurückgeht ([Tod61], siehe auch [Mah67, 7.2]), erlaubtneben zahlreichen Anwendungen einen weiteren, damals allerdings nur für n mit ν2(n) ≤10, also nicht vollständig ausgeführten Zugang zum Vektorfeldsatz. Diese Anwendungenund die Herleitung des Vektorfeldsatzes diskutieren wir im nächsten Abschnitt, hier sollzunächst nur der Beweis des Satzes von Toda ausgeführt werden.

556 9 Vektorbündel im metastabilen Bereich
Zuerst beschreiben wir, wie man diese Vektorfelder zu wählen hat. Dazu halten wir nfest und kürzen ρ(n)mit ρ ab. Außer für n = 16 ist die Metastabilitätsbedingung 2ρ ≤ n−2erfüllt und unter dieser Voraussetzung ist [Sn−2 , Sn−ρ−1] bereits stabil : [Sn−2 , Sn−ρ−1] ≅
πsρ−1(S0). Jede Wahl von ρ − 1 Vektorfeldern auf Sn−1 ergibt eine Aufspaltung
τSn−1 ≅ Rρ−1 ⊕ ξ
mit einer (n − ρ)-dimensionalen Bündelreduktion ξ von τSn−1. Umgekehrt liefert jede sol-che Bündelreduktion die entsprechende Anzahl von Vektorfeldern auf Sn−1 . Das Hindernisfür ein weiteres zu den Ausgangsvektorfeldern passendes orthogonales Vektorfeld ist dasSchnitthindernis für ξ, also die Homotopie-Euler-Klasse e′(ξ) ∈ [Sn−2 , Sn−ρ−1] oder dasBild der Klebeabbildung cξ ∶ Sn−2 → SO(n − ρ) unter der Projektion p ∶ SO(n − ρ) �→Sn−ρ−1. Statt mit den Vektorfeldern arbeiten wir ab jetzt mit den Bündelreduktionen ξ.
Zur Bestimmung einer geeigneten Bündelreduktion ξ verwenden wir mit instabilenGauß-Abbildungen und die Übersetzung
Tρ−1n−1 ∶ {P
αρ−1 , Sa} �→ πn−2(SO(n − ρ))
aus (9.4.7), wobei α wieder ein a-dimensionales Negativ von nλRρ mit genügend großemWert von a ist. Nach Wahl von ρ ∶= ρ(n) ist α auf Pρ−1 trivial, also insbesondere π∗s -orientierbar. Wie in (9.4.4) gezeigt wurde, entsprechen sich Thom-Klassen von α
∣Pρ−1 in{Pα
ρ−1 , Sa} und (n − ρ)-dimensionale Bündelreduktionen von τSn−1 unter Tρ−1n−1 . Wir wäh-
len jetzt eine (lineare) Trivialisierung θ für α und bezeichnen die durch
u(θ) ∶ Pαρ−1
M(θ)�→ PR
a
ρ−1M(pr)�→ ⋆R
a= Sa
definierte π∗s -Thom-Klassemitu(θ) ∈ {Pαρ−1 , Sa}.Weiterwählenwir S-Dualitätsabbildungen
in den Definitionen von Tρ−1n−1 und Tρ
n−1 und eine dazu passende Leiterergänzung L wie in(9.4.27), sodaß (9.4.27) gilt. Die gesuchte Bündelreduktion definieren wir nun durch
[ξθ] ∶= Tρ−1n−1 ○ L∗(u(θ)). (9.4.28)
Dann gilt:
Satz 9.4.29. Für n ≥ 16 und ρ = ρ(n) sei (τSn−1)⟨−ρ+1⟩ ∶= [ξθ] = Tρ−1n−1 ○ L∗(u(θ))
die (n − ρ)-dimensionale Bündelreduktion von τSn−1 , die wie oben durch eine mittelseiner Trivialisierung θ des Negativs von nλρ−1 definiertenThom-Klasse u(θ) konstruiertwurde. Dann ist die Homotopie-Euler-Klasse e′(ξ) ∈ [Sn−2 , Sn−ρ−1] ≅ πs
ρ−1(S0) von ξein Erzeugendes des Bildes des J-Homomorphismus J ∶ πρ−1(SO)(2) → πs
ρ−1(S0)(2).
Man beachte, daß sich, obwohl Bild(J)-Elemente eine beliebig hohe Ordnung anneh-men können, kein Widerspruch zu (5.1.11) ergibt. In den Fällen, wo die Bündelreduktion ξungeradedimensional ist, ist Bild(J)
(2) ebenfalls von der Ordnung 2, in den anderen Fällen

9.4 Vektorfelder auf Sphären und stabil parallelisierbaren Mannigfaltigkeiten 557
kannman ξwie dort beschrieben so abändern, daß das neue Schnitthindernis ebenfalls vonder Ordnung 2 ist.
Der Beweis besteht aus zwei Teilen. Zunächst wird das Schnitthindernis e′(ξθ) über-setzt in das Erweiterungshindernis für die Thom-Klasse L∗(u(θ)). Dieser Teil wurde imletzten Abschnitt bereits behandelt und zwar gilt nach (9.4.27)
e′(ξθ) = δ(u(θ)).
Hier ist δ der Korandoperator aus der von der Kofasersequenz von M(i) ∶ Pαρ−1 ⊂ Pα
ρ
Sρ−1+a g�→ Pα
ρ−1M(i)�→ Pα
ρq�→ Sρ+a Σg
�→ ΣPαρ−1 , (9.4.30)
induzierten langen exakten Sequenz in stabiler Kohomotopie, der von der stabilen Abbil-dung g repräsentiert wird. Im zweiten Teil wird das Hindernis δ(u(θ)) bestimmt. Daß einesolcheHindernisklasse unter bestimmtenDimensionsvoraussetzungen immer eine Bild(J)-Klasse ist, ist eine allgemeine Tatsache, deren Anwendung dann den Beweis abschließenwird. Dazu betrachten wir folgende etwas allgemeinere Situation:
Es sei X ein endlicher Komplex mit Unterkomplex A, Quotient Y ∶= X/A und Pro-jektion p ∶ X → Y . Weiter sei ξ ein n-dimensionales orientiertes Vektorbündel über Xmit Trivialisierung θ ∶ ξ
∣A ≅ Rn über A. Das durch die Kollabierkonstruktion über Ydefinierte Bündel ξ
/θ =∶ ξ bezeichnen wir mit ξ. Die Trivialisierung θ induziert nachKomposition mit der Projektion auf eine Faser auf Thom-Raum Niveau eine AbbildungM(θ) ∶ M(ξ
∣A) → M(Rn) = Sn , die eine Thom-Klasse u(ξ∣A) ∈ πn
s (M(ξ∣A)) repräsen-tiert. Das Verschwinden des Bildes von u(ξ
∣A) unter dem Randoperator δ aus der Kofaser-sequenz zur Inklusion M(ξ
∣A) ⊂ M(ξ)
δ ∶ πns (M(ξ∣A)) �→ πn+1
s (M(ξ)/M(ξ∣A))
ist notwendig und hinreichend für die Existenz einer Erweiterung von u(ξ∣A) zu einer π∗s -
Thom-Klasse von ξ über X.
Satz 9.4.31. Mit obigen Bezeichnungen und Voraussetzungen sei zusätzlich Y = X/A =ΣZ eine Einhängung und cξ die dann definierte Klebeabbildung von ξ. Dann kannman M(ξ)/M(ξ
∣A)mit Σn+1Z identifizieren und in πn+1s (M(ξ)/M(ξ
∣A)) ≅ π0s (Z) gilt
δ(u(ξ∣A)) = J([cξ]), das Erweiterungshindernis für u(ξ∣A) zu einer π∗s -Thom-Klasse
von ξ liegt also im Bild des J-Homomorphismus J ∶ [Z , SO(n)] → π0s (Z).
Beweis. Nach den Eigenschaften der Kollabierkonstruktion gilt p∗(ξ) ≅ ξ und schränktman die über p ∶ X → Y liegende Bündelabbildung E(ξ) → E(ξ) auf E(ξ
∣A) ein, so fak-torisiert diese Abbildung bildseitig über die Faser E(ξ)A/A über dem Basispunkt A/A vonY und liefert die Trivialisierung θ zurück. Deshalb kommutiert folgendes Diagramm vonThom-Räumen
Aξ∣A ↪ Xξ �→ Xξ/Aξ
∣A
↓ M(θ) ↓ M(p) ↓ q
(A/A)Rn↪ Y ξ �→ Y ξ/Sn
(9.4.32)

558 9 Vektorbündel im metastabilen Bereich
Die Abbildung M(p) ∶ Xξ → Y ξ bildet M(ξ∣A) ganz in (A/A)R
n= Sn ab, die resultierende
Quotientenabbildung q ∶ M(ξ)/M(ξ∣A) �→ Y ξ/Sn ist eine stetige Bijektion von kompak-
ten Räumen also ein Homöomorphismus. Ist jetzt Y = ΣZ eine Einhängung, so besitzt ξeine Klebeabbildung cξ und nach (8.1.12) können wir die untere Zeile in diesemDiagrammmit
ΣnZJ(c ξ)�→ Sn ↪ (ΣZ) ξ �→ Σn+1Z
Σ J(c ξ)�→ Sn+1
identifizieren. Insbesondere erhalten wir eine Homotopieäquivalenz
q ∶ Xξ/Aξ∣A ≅ Y ξ/Sn ≃ Σn+1Z ,
die wir in dem durch (9.4.32) induzierten Diagramm in stabiler Kohomotopie verwenden:
πns (Xξ) �→ πn
s (Aξ∣A)
δ�→ πn+1
s (Xξ/Aξ∣A)
↑ M(p)∗ ↑ M(θ)∗ ↑ ≅
πns (Y ξ) �→ πn
s (Sn)J(c ξ)
∗
�→ πn+1s (Σn+1Z)
Ist un ∈ πns (Sn) das Bild der 1 unter demEinhängungsisomorphismus, so giltM(θ)∗(un) =
u(ξ∣A) und damit δ(u(ξ
∣A)) = J(cξ)∗(un) = J([cξ]), wenn wir die Identifikation q∗ unter-drücken.
Wir wenden jetzt den Satz auf den Fall (X ,A) = (Pρ , Pρ−1), Y = Sρ und ξ = α an. Dienumerische Beziehung zwischen ρ und n impliziert, daß das Bündel α
∣Pρ−1 trivial ist. Es sei θwie in den Voraussetzungen von (9.4.4) eine Trivialisierung von α, die dann die π∗s -Thom-Klasse u(θ) ∈ πa
s (Pαρ−1) und ein Bündel α = α
/θ über Sρ liefert. Außerdem können wira >> ρ voraussetzen, dann sind alle vorkommenden Bündel stabil und die exakte Sequenz
SVektR(Pρ−1)i∗←� SVektR(Pρ)
p∗←� SVektR(Sρ)
zeigt, daß [α]s ∈ SVektR(Sρ) 2-lokal ein Erzeugendes sein muß, denn p∗([α]s) = [α]serzeugt den Kern von i∗, der hier die Ordnung 2 hat. Es folgt δ(u(θ)) = J(ωρ−1)mit demErzeugenden ωρ−1 ∈ πρ−1(SO) bis auf einen ungeraden Faktor.
Nach dem ersten Beweisteil gilt dann für die (n − ρ)-dimensionale Bündelreduktionξθ = Tρ−1
n−1 (L∗(u(θ))) von τSn−1 gerade e′(ξθ) = J(ωρ−1), was den Beweis von (9.4.29)beendet.
Bemerkung 9.4.33.
1. Gegeben sei eine (n − ρ(n))-dimensionale Bündelreduktion ξ von τSn−1. Statt wie in(9.4.29) nach demHindernis für nur einen Schnitt zu fragen, läßt sich auch das Hinder-nis für s weitere Schnitte in ξ untersuchen. Die von uns gemachte Übersetzung bleibtgültig, solange 2 ⋅ ρ(n) ≤ n − 2s + 1 erfüllt ist und der Satz 9.4.31 ist anwendbar, solanges ≤ ρ(n) gilt. Dann liegt das Hindernis im Bild des J-Homorphismus. Diese Version istzum Beispiel nötig zur Behandlung des Schnittproblems für das Bündel η∗(τSm), siehe(3.3.21) und [CrS79].

9.5 Gauß-Abbildungen in K-Theorie 559
2. Die komplexe Version von (9.4.29) ist ebenfalls gültig, da aber hier SVektR(Pm(C))nicht mit J(Pm(C)) übereinstimmt, muß man (9.4.31) anpassen. Am einfachsten istwohl die Verwendung des folgenden Lemmas ([CrK87, 5.7]), wobei allerdings im Be-weis die Adams-Vermutung für den Raum X verwendet wird:
Lemma 9.4.34. Für die Inklusion des Unterkomplexes i ∶ A → X in den endlichenKomplex X sei i∗ ∶ SVektR(X) → SVektR(A) surjektiv. Ist das Vektorbündel α =(E , p, X) über A p-lokal stabil faserhomotopietrivial, so gibt es ein zu α p-lokal stabilfaserhomotopieäquivalentes Bündel β, das über A als Vektorbündel stabil trivial ist.
9.5 Gauß-Abbildungen in K-TheorieDie Bündelreduktionen (τSn)⟨−k⟩ , die man durch Abspalten von Vektorfeldern aus demTangentialbündel der n-Sphäre erhält, spielen eine wichtige Rolle in den Homotopiegrup-pen der orthogonalen Gruppe und eine erste Klärung dieser Rolle ist deshalb Ziel diesesKapitels. Dabei geht es hauptsächlich um die Eigenschaft von Gauß-Abbildungen, oft eineniedrigere Adams-Filtrierung als das Bündel selbst zu besitzen. Für die Gauß-Abbildungengst(τSn)⟨−k⟩ ist dies gerade der Fall, diese induzieren nichttriviale Homomorphismen sowohl
in Kohomologie wie auch K-Theorie, sind also in der üblichen Terminologie Abbildungender Adams-Filtrierung 0. Wir nennen deshalb jedes stabil triviale Bündel, dessen Gauß-Abbildung diese Eigenschaft für gewöhnliche Kohomologie hat, ein Adams-Filtrierung-0-Bündel und ein bo-primäres Bündel, wenn dies für reelle K-Theorie gilt. Sie stellen die ein-fachsten stabil trivialen Bündel dar.
Daß (τSn)⟨−k⟩ ein Adams-Filtrierung-0-Bündel ist, hat eine Reihe von interessantenKonsequenzen. Einmal kann man daraus ableiten, daß das Abspalten von Vektorfeldernaus τSn , also das Bilden von (τSn)⟨−k⟩, mit einer Erhöhung der Ordnung von (τSn)⟨−k⟩
einher gehen muß. Zum anderen ergibt sich so ein weiterer fast rein algebraischer Beweisdes Vektorfeldsatzes, der nicht auf die Isomorphie KO0
(Pk) ≅ J(Pk) zurückgreift und soeinen ganz anderen Aspekt des Vektorfeld-Problems beleuchtet.
Nach einer Beschreibung aller bo-primären Bündel in STn−k(Sn) im metastabilen Be-reich bestimmen wir noch die genaue Ordnung der Bündelreduktionen (τSn)⟨−k⟩. Die bei-den letzten Abschnitte behandeln Anwendungen einer anderen wichtigen Eigenschaft derBündel (τSn)⟨−k⟩ , die im Satz von Toda (9.4.29) bereits formuliert und hergeleitet wurde.Diese besagt, daß für die maximale Anzahl von Vektorfeldern, nämlich k0 = ρ(n + 1) − 1,die Homotopie-Euler-Klasse e′((τSn)⟨−k0⟩), also das Hindernis für ein weiteres Vektorfeld,die Bild(J)-Untergruppe in πs
k0(S0)(2) erzeugt. Auch hieraus werden wir einen Beweis des
Vektorfeldsatzes ableiten, diesmal unter Verwendung der e-Invarianten, und so einen altenAnsatz vonToda zuEnde führen.Daßdas Erzeugende vonBild(J) ⊂ πs
k0(S0)(2) in bestimm-
ten Dimensionen in der Stabilisierungssequenz in Bild(p∗) = Bild(e′) liegt, bedingt ähn-lich wie für das Tangentialbündel der Sphäre selbst, das Verschwinden von Bündeln der Artγ∗(τSm)mit Abbildungen γ ∶ Sm+r → Sm , die diese Bild(J)-Elemente repräsentieren.

560 9 Vektorbündel im metastabilen Bereich
9.5.1 Adams-Filtrierung-0- und bo-primäre Bündel
In diesem Abschnitt setzen wir einfachheitshalber n als ungerade voraus. Weiter sei β einb-dimensionales Negativ von (n+2) ⋅ λRk+1 , womit α ∶= β⊕ λ das bisher betrachtete Negativvon (n + 1) ⋅ λRk+1 ist. Wir wählen b mit a ∶= b + 1 ≡ 0 mod 8. Zur Untersuchung der Gauß-Abbildungen gst
(τSn)⟨−k⟩ mit Methoden der K-Theorie verwenden wir die im letzten Kapitel
bereits hergeleitete Übersetzung der Gruppen STn−k(Sn) in stabile Kohomotopiegruppen:
Skn ∶ ST
n−k(Sn)≅
�→ {Pβk+1 , S
b+1}
Das Bild einer Bündelreduktion (τSn)⟨−k⟩ ∈ STn−k(Sn) des Tangentialbündels der n-Sphäre unter dem Isomorphismus Sk
n bezeichnen wir mit xn ,k ∶= Skn((τSn)⟨−k⟩). Von den
dabei auftretendenThom-Räumen Pβk+1 (bzw. P
αk für die instabilen Gauß-Abbildungen) be-
rechnen wir die K-Gruppen und stellen fest, was sich beim Übergang von instabilen zustabilen Gauß-Abbildungen ergibt. Die instabile Gauß-Abbildung g
(τSn)⟨−k⟩ entspricht, wie
wir gesehen haben, einerThom-Klasse von α = β⊕ λ und ist deshalb von unendlicher Ord-nung (n ≡ 1 mod 2), während gst
(τSn)⟨−k⟩ natürlich endliche Ordnung besitzt. Das Bild von
gst(τSn)⟨−k⟩ in K-Theorie, oder genauer das Element hKO(xn ,k) ∈ KO
0(Pβ
k+1), ist nicht nurnichttrivial, das ist die von uns verwendete genaue Definition eines bo-primären Bündels,sondern sogar ein Erzeugendes. Es hat die Ordnung 21+ϕ(k), wobei ϕ(k) die bekannte Funk-tion ∣λRk ∣ = 2
ϕ(k) für die Ordnung des kanonischen Linienbündels ∣λRk ∣ = 2ϕ(k) in KO0
(Pk)
ist. Es folgt der angekündigte Beweis des Vektorfeldsatzes, der auf dieser Ordnungsberech-nung fußt und dieUntersuchung undBeschreibung der bo-primären Bündel in STn−k(Sn).
Stabile und instabile Gauß-Abbildungen. Zuerst müssen wir noch einmal auf dieRolle der Gauß-Abbildungen in der bisherigen Diskussion eingehen und den Unterschiedzwischen der in (9.4.4) betrachteten “instabilen” Gauß-Abbildung
gξ ∶ Sn−1 → SO(n + 1)/SO(n − k)
einer (n − k)-dimensionalen Bündelreduktion ξ = (τSn)⟨−k⟩ von τSn und deren stabileVersion
gstξ ∶ Sn−1 → SO(n + 2)/SO(n − k),
die im Zusammenhang mit James-Periodizität (9.2.2) und (9.4.20) vorkam, behandeln. Diestabile Gauß-Abbildung gstξ erhält man wie bereis gesagt aus gξ durch Komposition mitder von der Inklusion SO(n + 1) ⊂ SO(n + 2) induzierten Abbildung oder, wenn man gξals Abbildung nach Vk+1(R
n+1) = SO(n + 1)/SO(n − k) auffaßt, durch Hinzufügen desfesten Vektors en+2 ∈ Rn+2 zum (k + 1)-Bein gξ(x). Führt man für beide Varianten die

9.5 Gauß-Abbildungen in K-Theorie 561
Übersetzung aus (9.4.4) durch, erhält man folgendes kommutative Diagramm
STn−k(Sn)
πn(SO(n + 1)/SO(n − k)) πn(SO(n + 2)/SO(n − k))
πn+1(Pn+1/Pn) πn(Pn/Pn−k−1) πn(Pn+1/Pn−k−1) πn(Pn+1/Pn)
{Sa , Sa} {Pβ⊕λk , Sa} {Pβ
k+1 , Sa} {Sa−1 , Sa}
��
����������������
∂1
�� ��
����������������
∂st1
��
��r∗
��
D ○ σ∞
R∗
��i∗
��
R∗
��q∗
��
D ○ σ∞
��
��D(r)∗
��D(i)∗
��D(q)∗
(9.5.1)Für k ≤ n − 2 und n ≥ 16 befindet man sich im metastabilen Bereich, dann ist ∂st1 nach(9.1.1) bijektiv und R∗ sowie σ∞ sind Isomorphismen. Links im Diagramm steht dann dieAbbildung Tk
n ∶ {Pαk , S
a} → STn−k(Sn), auf der rechten Seite steht der IsomorphismusSkn ∶ ST
n−k(Sn) → {Pβk+1 , S
a} aus (9.4.20). Die waagrechten Sequenzen beschreiben geradeden Unterschied zwischen stabilen und instabilen Gauß-Abbildungen. Die untere exakteSequenz gehört zur Kofasersequenz
→ Sa−1 D(q)�→ Pβ
k+1D(i)�→ Pβ⊕λ
kD(r)�→ Sa →, (9.5.2)
die über S-Dualität aus der Kofasersequenz
Pn/Pn−k−1i�→ Pn+1/Pn−k−1
q�→ Pn+1/Pn
r�→ ΣPn/Pn−k−1
von Quotienten projektiver Räume entsteht. Für ungerades n, was wir ja vorausgesetzt ha-ben, ist die Abbildung D(q)∗ ∶ {ΣPβ
k+1 , Sa} → {Sa , Sa} trivial, denn sie faktorisiert über
die endliche Gruppe {ΣPβ1 , Sa}. Deshalb ist D(r)∗ ∶ {Sa , Sa} �→ {Pβ⊕λ
k , Sa} injektiv unddie untere Zeile reduziert sich zur kurzen exakten Sequenz
0�→ ZD(r)∗�→ {Pα
k , Sa}
D(i)∗�→ {Pβ
k+1 , Sa} �→ 0, (9.5.3)
die eine erste Beschreibung des Unterschieds zwischen instabilen und stabilen Gauß-Abbildungen darstellt.
Gauß-Abbildungen in K-Theorie. Wir untersuchen jetzt die von (9.5.2) induzierteSequenz, also den Übergang von instabilen zu stabilen Gauß-Abbildungen, in reeller K-Theorie. Wie oben reduziert diese sich zu einer kurzen exakten Sequenz:
0→ KO0(Sa)
D(r)∗�→ KO0
(Pαk )
D(i)∗�→ KO0
(Pβk+1) → 0 (9.5.4)
Im Folgenden sei n von der Form n = 8m + 7, denn nur für diese n hat man die uns inter-essierenden Bündelreduktionen (τSn)⟨−k⟩ von τSn mit parallel zur 2-Teilbarkeit von n + 1

562 9 Vektorbündel im metastabilen Bereich
wachsendem k. Die anderen ungeraden Dimensionen sind ähnlich und werden weiter un-ten kommentiert. Zunächst zu den Gruppen:
Lemma 9.5.5. Es sei β ein (8t − 1)-dimensionales Negativ von (n + 2) ⋅ λRk+1 und n =8m + 7, dann gilt:
KO0(Pβ
k+1) ≅ Z/21+ϕ(k) .
Beweis. Wir repräsentieren β durch (2s − n − 2) ⋅ λRk+1 mit genügend großem s. Dann hatman nach (7.1.27)
KO0(Pβ
k+1) ≅ KO0(P(2
s−n−2)⋅λ
k+1 ) ≅ KO0(Pk+2s−n−1/P2s−n−3) = Z/2c
und es folgt
c = ϕ(k + 2s − n − 1) − ϕ(2s − n − 3)= ϕ((2s − n − 1 − 8) + 8 + k) − ϕ((2s − n − 1 − 8) + 6)= ϕ(8 + k) − ϕ(6) = 4 + ϕ(k) − 3 = 1 + ϕ(k),
da (2s − n − 1 − 8) durch 8 teilbar ist.
Lemma 9.5.6. Es sei α ein 8t-dimensionales Negativ von (n + 1) ⋅ λRk+1 und n = 8m + 7,dann gilt:
KO0(Pα
k ) ≅ Z⊕Z/2ϕ(k) .
Beweis. Man geht vor wie im letzten Beweis unter Verwendung von (7.1.31). Dies ergibtdie Behauptung für k ≡ 6, 7, 8 mod 8. Die restlichen Fälle führt man durch Betrachtungder Einschränkungen hierauf zurück, ähnlich wie bei der Berechnung von KO0(Pa(R)).Alternativ kann man den KO-Theorie-Thom-Isomorphismus einsetzen, denn wegen n +1 ≡ 0 mod 8 ist α orientierbar für reelle K-Theorie, eine Thom-Klasse uR wurde in (7.1.33)konstruiert. Der Thom-Isomorphismus mit uR ergibt dann direkt KO0
(Pαk ) ≅ KO
0(Pk) ≅
Z⊕Z/2ϕ(k) .
Die exakte Sequenz (9.5.4) ist also von der Form
0→ Z→ Z⊕Z/2ϕ(k) → Z/21+ϕ(k) → 0 (9.5.7)
unddieGruppenerweiterung ist hierdurch imWesentlichen festgelegt: Für k = 0 erhältman0→ Z→ Z→ Z/2→ 0 und dies zeigt über die Natürlichkeit der Sequenz, daß D(r)∗(1) inKO0
(Pαk )/Tor immer genau durch 2 teilbar ist. Es folgt, daß unter D(i)∗ ∶ KO0
(Pαk ) �→
KO0(Pβ
k+1) jede Thom-Klasse von α, also ein Element der Form (1, ?) in Z ⊕ Z/2ϕ(k) , aufein Erzeugendes abgebildet wird, also von der Ordnung 21+ϕ(k) ist.

9.5 Gauß-Abbildungen in K-Theorie 563
Konstruktion von Bündelreduktionen über Tkn . Setzt man jetzt voraus, daß α = β⊕
λ auf Pk trivial ist, d.h. es gilt n + 1 ≡ 0 mod 2ϕ(k) oder äquivalent k ≤ ρ(n + 1) − 1, soist α insbesondere π∗s -orientierbar. Es sei u ∈ {Pα
k , Sa} eine beliebig gewählteThom-Klasse
von α, u ∶= hKO(u) ihr Bild in KO0(Pα
k ) und ξu = [(τSn)⟨−k⟩] ∶= Tkn (u) die zugehörige
Bündelreduktion. Das Element in {Pβk+1 , S
a}, das unter dem Isomorphismus Skn aus (9.4.20)
auf ξu abgebildet wird, bezeichnen wir im Folgenden mit xn ,k(u) oder kurz xn ,k
xn ,k ∶= Skn(ξu) ∈ {P
βk+1 , S
a}.
Das kommutative Diagramm (9.5.1) zeigt dann, daß die Klassen xn .k und D(i)∗(u) gleichsind. Wendet man jetzt hKO auf diese Beziehung an, erhält man hKO(xn ,k) = D(i)∗(u)und da u ∶= hKO(u) eine Thom-Klasse in KO∗ für α ist, folgt, wie oben bereits festgestellt,daß D(i)∗(u) ein Erzeugendes in KO0
(Pβk+1) ≅ Z/21+ϕ(k) ist. Damit folgt.
Korollar 9.5.8. Für n = 8m+7, k ≤ ρ(n+1)−1 sei ξu = [(τSn)⟨−k⟩] = Tkn (u) die durch
eine beliebige Thom-Klasse u ∈ {Pαk , S
a} von α definierte Bündelreduktion von τSn. Dashierdurch gegebene Element xn ,k = Sk
n(ξu) in {Pβk+1 , S
a} wird durch
hKO ∶ {Pβk+1 , S
a} �→ KO0(Pβ
k+1) ≅ Z/21+ϕ(k)
auf ein Erzeugendes abgebildet. Es gilt
∣hKO(xn ,k)∣ = 21+ϕ(k)
und ξu selbst hat mindestens diese Ordnung in πn−1(SO(n − k)).
Der Wert 21+ϕ(k) ist nahe der überhaupt möglichen Maximalordnung eines Elemen-tes in {Pβ
k+1 , Sa}, dies werden wir weiter unten ausnutzen, um die exakte Ordnung von
(τSn)⟨−k⟩ zu bestimmen.Solange α eine Thom-Klasse u besitzt, definieren die anderen Elemente in KO0
(Pαk )
ebenfalls Bündelreduktionen, denn
hKO ∶ {Pk , S0} �→ KO0(Pk) ≅ Z/2ϕ(k) ⋅ [λRk ]s
ist, wie wir in (6.3.36) gesehen haben, surjektiv. Ein Urbild von [λRk ]s ist bis auf einen unge-raden Faktor, den wir im Folgenden unterdrücken, durch die Klasse der Transferabbildungtr ∶= J([Rk+1]s) gegeben. Bezeichnet Φ(a) = a ◇ u den mit der Thom-Klasse u definiertenThom-Isomorphismus, so ist tr ◇ u ∈ {Pα
k , Sa} ein Urbild von [λRk ]s ◇ u ∈ KO0
(Pαk ) und
Tkn (tr ◇ u) ∈ STn−k(Sn) ⊂ πn−1(SO(n − k)) ist definiert.Aus der exakten Sequenz (9.5.7) folgt dann D(i)∗([λRk ]s ◇ u) = 2⋅ D(i)∗(u) =
2 ⋅ hKO(xn .k) -zumindest bis auf einen ungeraden Faktor. Zur Identifikation des BündelsTkn (tr ◇u) betrachten wir jetzt k = 1, wo die Sequenz (9.5.7) die Form 0→ Z→ Z⊕Z/2→
Z/4 → 0 hat. Da hKO ∶ {Pβk+1 , S
a} �→ KO0(Pβ
k+1) für k ≤ 2 bijektiv ist (siehe Abschnitt

564 9 Vektorbündel im metastabilen Bereich
9.3), und wir aus der Stabilisierungssequenz her wissen, daß η∗(τSn−1) in πn−1(SO(n− 1))ein von 0 verschiedenes Element der Ordnung 2 repräsentiert und [(τSn)⟨−1⟩] ein Erzeu-gendes ist, löst dies noch einmal das Gruppenerweiterungsproblem in (9.3.6) und zeigt inπn−1(SO(n − 1)) die Beziehung
2 ⋅ [(τSn)⟨−1⟩] ≅ [η∗(τSn−1)] ≅ T 1n(tr ◇ u),
sodaß Tkn (tr ◇ u) die Klasse einer Bündelreduktion (η∗(τSn−1))⟨−k+1⟩ ist.
Noch einmal der Vektorfeldsatz. Die Berechnung von hKO(xn ,k) in KO0(Pβ
k+1) er-laubt einenweiteren Beweis des Vektorfeldsatzes, der nicht auf die Beziehung zu J-Gruppenzurückgreift und einen anderen Aspekt des Vektorfeld-Problems aufzeigt. Nach (9.5.8) isthKO(xn ,k) ein Erzeugendes der Gruppe KO
0(Pβ
k+1), die damit ganz aus stabil sphärischenElementen besteht. Für solche Elemente liefern die Adams-Operationen aber Einschrän-kungen. Dazu berechnen wir die Wirkung der Adams-Operation ψ3 auf KO0
(Pβk+1) ≅
Z/21+ϕ(k):
Lemma9.5.9. Es sei β ein (8t−1)-dimensionalesNegativ von (n+2)λk+1 und n = 8m+7.Dann operiert ψ3 −34t ⋅ id durch Multiplikation mit c ⋅ (34t − 1) auf KO0
(Pβk+1)mit c /≡ 0
mod 2.
Beweis. Wir berechnen ψ3 auf KO0(Pα
k )mit α = β⊕ λ und verwenden die exakte Sequenz(9.5.4)
0→ KO0(S8t) t∗
�→ KO0(Pα
k )j∗�→ KO0
(Pβk+1) → 0.
Es sei uR die in (7.1.33) konstruierteThom-Klasse von α und τ das dort definierte Erzeugen-de der Torsionsuntergruppe von KO0
(Pαk ) ≅ Z⊕Z/2ϕ(k). Dort wurde gezeigt
ψ3uR = 34tuR + (34t − 1)/2 ⋅ τ.
Wir wählen z ∶= j∗(uR) als Erzeugendes von KO0(Pβ
k+1), dann hat man j∗(τ) = 2 ⋅ c ⋅ z mitc /≡ 0 mod 2 und es folgt
(ψ3 − 34t)(z) = j∗(τ) ⋅ (34t − 1)/2 = (34t − 1) ⋅ c ⋅ z.
Die durch ψk gegebenen generellen Einschränkungen für stabil sphärische Klassen er-geben sich aus der bekannten Art und Weise, wie ψk auf KO0
(Sm) operiert, in unseremSpezialfall lauten diese:
Lemma 9.5.10. Mit den Bezeichnungen aus dem vorhergehenden Lemma gilt
Bild(hKO ∶ {Pβk+1 , S
8t} �→ KO0(Pβ
k+1)) ⊂ Kern(ψ3 − 34t)

9.5 Gauß-Abbildungen in K-Theorie 565
Beweis. Ein Element x aus Bild(hKO) schreibt sich als x = h∗(u4t)mit h ∶ Pβk+1 → S8t und
u4t ∈ KO0(S8t) als Erzeugendem. Ist 8t genügend groß gewählt, kannman annehmen, daß
h eine echte Abbildung ist. Aus ψ3u4t = 34tu4t folgt dann die Behauptung.
Beide Lemmata begrenzen die Ordnung eines Elements x in hKO({Pβk+1 , S
8t}), dennes muß (34t − 1) ⋅ x = 0 gelten. Umrechnen mit ν2(34t − 1) = 1 + ν2(n + 1) nach (7.1.23)ergibt 21+ν2(n+1) ⋅ x = 0. Die Bündelreduktion (τSn)⟨−k⟩ liefert aber über Sk
n das Elementxn ,k ∈ {P
βk+1 , S
8t}, dessen Bild hKO(xn ,k) in KO0(Pβ
k+1) von der Ordnung 21+ϕ(k) ist. Esfolgt
1 + ϕ(k) ≤ 1 + ν2(n + 1).
Eine leichte Rechnungmit derDefinition von ϕ(k) liefert dann k ≤ ρ(n+1)−1 als Folgerung,also einen Beweis des Vektorfeldsatzes für n + 1 ≡ 0 mod 8.
Korollar 9.5.11. Für n + 1 ≡ 0 mod 8 gibt es auf Sn höchstens ρ(n + 1) − 1 orthogonaleVektorfelder.
Bemerkung. Diese fast rein algebraische Herleitungsweise des Vektorfeldsatzes geht auf[MaM76] und [AtD72, (letzte Bemerkung)] zurück. Auf die Formulierung in [MaM76] ge-hen wir weiter unten noch einmal ein.
Adams-Filtrierung. Wir fixieren zunächst einmal die Notation. Eine stabile Abbil-dung f ∶ X → Y zwischen endlichen Komplexen ist bekanntlich von Adams-Filtrierung 0für eine Kohomologietheorie h∗ , wenn der von f induzierte Homomorphismus f ∗ nicht-trivial ist, anderenfalls ist die Adams-Filtrierung positiv (zur Adams-Filtrierung vergleicheAbschnitt 4.6). Hiervon ausgehendmachenwir folgende für unsere Zwecke bereits geeignetumformulierte Definition, die aber äquivalent zum allgemeinen Sprachgebrauch ist:
Definition. Ein stabil trivales Bündel ξ, bzw. seine Klasse [ξ] in STn−k(Sn), heißt Adams-Filtrierung-0-Bündel, wenn seine Gauß-Abbildung gstξ einen nichttrivialen Homomorphis-mus in gewöhnlicher Homologie H∗(−;Z) induziert und bo-primäres Bündel, wenn dieKlasse hKO ○ Sk
n([ξ]) in KO0(Pβ
k+1) nicht trivial ist (im metastabilen Bereich).
Es wurde bereits angemerkt, daß eine Gauß-Abbildung gξ oft eine niedrigereAdams-Filtrierung als ξ selbst hat. Neben dem höheren Zusammenhang der Stiefel-Mannigfaltigkeiten ist dies der zweite wichtige Vorteil von Gauß-Abbildungen.
Die instabile Gauß-Abbildung von τSn ist offensichtlich vonAdams-Filtrierung 0, denngτSn ist einfach die Identität, gτSn = id ∶ Sn → V1(R
n+1) = Sn . Gleiches gilt für die stabileGauß-Abbildung gstτSn ∶ Sn → V2(R
n+2), denn diese ist ein Erzeugendes von πn(V2(Rn+2))
und der Hurewicz-Homomorphismus πn(V2(Rn+2)) → Hn(V2(R
n+2);Z) ist bijektiv. Das

566 9 Vektorbündel im metastabilen Bereich
kommutative Diagramm von Gauß-Abbildung mit ξ = (τSn)⟨−k⟩
Sn V2+k(Rn+2)
V2(Rn+2)
��gstξ
����
����
����
���
gstτSn
��� �� ���� ��
zeigt dann unmittelbar, daß auch die stabile Gauß-Abbildung von (τSn)⟨−k⟩ von Adams-Filtrierung 0 ist.
Ist [ξ] ∈ STn−k(Sn) ein Adams-Filtrierung-0-Bündel, dann ist ξ auch ein bo-primäresBündel. Die Herleitung hierzu können wir uns sparen, denn in (9.5.8) haben wir bereitsnachgewiesen, daß (τSn)⟨−k⟩ bo-primär ist. Außerdem hat man für K-Theorie zusätzlichdie Hopf-Abbildung η ∶ S3 → S2 , die, wie wir in (4.4.19) gesehen haben, eine nichttrivialeAbbildung in reeller K-Theorie induziert. Dies hat zur Konsequenz, daß eine ganze Rei-he von stabil trivialen Bündeln ξ ebenfalls bo-primäre Bündel sind, sich also durch reelleK-Theorie “entdecken” lassen. Neben den Bündeln (τSn)⟨−k⟩ sind so auch die Bündelreduk-tionen (η∗τSn−1)⟨−k⟩ oft bo-primär. Von daher ist es klar, daß es mehr bo-primäre Bündelals Adams-Filtrierung-0-Bündel gibt.
In den ersten Dimensionen sind sogar alle Bündel bo-primär, denn für k = 0, 1, 2, giltKO0
(Pβk+1) ≅ ST
n−k(Sn) ∶
STn(Sn) ≅ KO0(Pβ
1 ) ≅ {Z[τSn], n geradeZ/2[τSn], n ungerade
STn−1(Sn) ≅ KO0(Pβ
2 ) ≅
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
0 n ≡ 0 mod 4(Z/2)2 n ≡ 1 mod 4Z/2 n ≡ 2 mod 4Z/4 n ≡ 3 mod 4
STn−2(Sn) ≅ KO0(Pβ
3 ) ≅
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
0 n ≡ 0 mod 4Z/2 n ≡ 1 mod 4(Z/2)2 n ≡ 2 mod 4Z/8 n ≡ 3 mod 4
,
Dies folgt aus den Rechnungen in (9.3.6) oder aus allgemeinen Gründen, da der Über-gang von stabiler Kohomotopie zu (zusammenhängender, 2-lokaler, reeller) K-Theorie 3-zusammenhängend ist. Die repräsentierenden Bündel findet man ebenfalls in (9.3.6).
Zu den Gruppenerweiterungen sei noch bemerkt: Für n = 8m + 1 und k = 1 spaltetdie Sequenz (9.5.4), anders als für n = 8m + 7, sodaß hier die Relation 2 ⋅ (τS8m+1)⟨−1⟩ ≅η∗(τS8m) nicht gilt und beide Bündel die Ordnung 2 haben, ebenso für k = 2.
Ein Beispiel mit positiver Adams-Filtrierung das auch nicht bo-primär ist, ist ν∗n(τSn)
für eine Einhängung νn ∶ S3+n → Sn der Hopf-Abbildung [ν] ∈ πs3(S0) mit n /≡ −1 mod

9.5 Gauß-Abbildungen in K-Theorie 567
8, denn dann ist ν∗n(τSn) nicht trivial aber es gilt ν∗n = 0 in K-Theorie. Für k ≤ 5 kommenzu den bo-primären Bündeln nur noch ν∗n(τSn) und seine Bündelreduktionen hinzu undman kann so leicht alle Elemente in STn−k(Sn), k ≤ 5, explizit durch Bündel repräsentieren.Bei k = 6 erscheint das Bündel ν∗n+3 ○ ν∗n(τSn), das mit den bisher betrachteten Methodennicht zugänglich ist.
Bemerkung. Wir gehen noch einmal auf die Konsequenzen davon ein, daß ξ ∶= (τSn)⟨−k⟩
ein Adams-Filtrierung-0-Bündel ist. Zum einen kann dies als Erkärung für die mit k wach-sendeOrdnung von ξ dienen, zumanderen läßt sich damit ein sehr eleganter und durchsich-tiger Beweis des Vektorfeldsatzes führen. Dies ist der oben bereits angesprochene Beweisaus [MaM76], der allerdings in seiner Formulierung 2-lokale zusammenhängende reelleK-Homologietheorie ko∗(X) zusammen mit einer stabilen Version der Adams-Operationψ3 − 1 verwendet. Obwohl wir diese Begriffe nicht einführen wollen, soll der Beweis hierdoch kurz als Ausblick erläutert werden. Den Raum P∞(R)/Pn−k−1(R) kürzen wir wiedermit Pn−k ab.
Unter den Dimensionsvoraussetzungen n = 8m + 7 > 15, 2k ≤ n muß der Hurewicz-Homomorphismus für ko∗ das zur stabilen Gauß-Abbildung gstξ gehörende Element z inπsn(Pn−k) auf ein Erzeugendes in kon(Pn−k) ≅ Z/21+ϕ(k) abbilden, denn die natürliche
Transformation πsn(Pn−k) → kon(Pn−k) → Hn(Pn−k ;Z) bildet z nichttrivial ab, da z die
gleiche Adams-Filtrierung wie gstξ hat. Die Ordnungserhöhung von ξ wird also hiervonund von der Tatsache, daß die Gruppenerweiterungen in kon(Pn−k) anders ausfallen alsin H∗(Pn−k ;Z), wenn man will, erzwungen. Die unterschiedlichen Gruppenerweiterun-gen sind Folge der verschieden formalen Gruppen in gewöhnlicher Kohomologie und K-Theorie. Daß die stabile Adams-Operation ψ3 − 1 auf kon(Pn−k) unabhängig von k immerals Multiplikation mit 21+ν2(n+1) wirkt, ist eine weitere für die K-Theorie spezifische Eigen-schaft, die damit zusammenhängt, daßP0 sich für K-Theorie wie einMoore-Raum zuZ/2∞verhält und die dann den Vektorfeldsatz zur Folge hat. Denn die mit wachsendem k steigen-de Ordnung von hko(z) wird durch die Operation von ψ3 − 1 begrenzt, da ja ψ3(x) − x = 0für stabil sphärischeKlassenwie x = hko(z) gilt. Es folgt wie oben 1+ν2(n+1) ≥ 1+ϕ(k), dienumerische Bedingung aus der sich leicht der Vektorfeldsatz ergibt. Eine Verwendung vonS-Dualität ist also nicht nötig, außerdem sei bemerkt, daß die in [MaM76] gefundene Be-rechnung vonψ3−1 völlig anders undunabhängig vondemhier geführtenBeweis ist, der aufAdams zurückgeht. Die von uns betrachtete Gruppe KO0
(Pβk+1) ist nun nichts anderes als
kon(Pn−k), wie man durch Einsetzen der Definition von kon(X) und S-Dualität einsehenkann. Es handelt sich daher bei den beiden Herleitungen natürlich nicht um grundsätzlichverschiedene Beweise, allerdings ist die Formulierungmit zusammenhängender K-Theoriebei weitem durchsichtiger als derenÜbertragung über S-Dualität in eine KO-Kohomologie-Version. Obige Diskussion zeigt übrigens auch die Berechtigung unserer Definition für bo-primäre Bündel.
bo-primäre Bündel. Naheliegend ist die Frage, welche Klassen in KO0(Pβ
k+1) Bildervon Bündeln sind und wie man diese gegebenenfalls konstruiert, also eine Klassifikationder bo-primären Bündel. Die oben besprochene Methode (über Urbilder unter hKO neh-

568 9 Vektorbündel im metastabilen Bereich
men und dann Anwendung von Tkn ) endet, wenn man die maximale Bündelreduktion
(τSn)⟨−k⟩ erreicht hat, genauer wenn das Bündel α = β⊕ λ keine π∗s -Thom-Klasse mehr be-sitzt. Es gibt aber noch weitere bo-primären Bündel. Um einen Überblick zu erhalten, mußman zunächst die Gruppen KO0
(Pβk+1) (oder die hierzu isomorphen Gruppen kon(Pn−k)
berechnen. Ähnlich wie für (9.5.5) läßt sich die Bestimmung dieser Gruppen leicht auf dievon KO∗-Gruppen von Quotienten projektiver Räume, die man etwa in [FuY73] findet, zu-rückführen. Da 4l ⋅λm ein KO∗-orientierbares Bündel ist, handelt es sich um 4×8 Gruppen(die teilweise intern von k abhängen).
i / j 0 1 2 3 4 5 6 = 70 Z 0 0 0 Z 0 01 Z/2 Z/2 +Z/2 Z/2 0 0 0 02 Z Z/2 Z/2 +Z/2 Z/2 Z 0 03 Z/24 l+1 Z/24 l+2 Z/24 l+3 Z/24 l+3 Z/24 l+4 Z/24 l+4 Z/24 l+44 Z 0 0 0 Z 0 05 Z/2 Z/2 +Z/2 Z/2 0 0 0 06 Z Z/2 Z/2 +Z/2 Z/2 Z 0 07 Z/24 l+1 Z/24 l+2 Z/24 l+3 Z/24 l+3 Z/24 l+4 Z/24 l+4 Z/24 l+4
Die Gruppen KO0(Pβ
k+1) für n = 8m + i , k = 8l + jzuständig für STn−k(Sn) ≅ πn(SO/SO(n − k)) (metastabil)
Beispiel. n = 8m + 1 und k ≡ 0 mod 8:
KO0(Pβ
k+1) ≅ KO6(P(2
s−8m−3)λ
k+1 ) ≅ KO−2(P5λk+1) ≅ KO
−2(Pk+6/P4) ≅ Z/2
(letzter Isomorphismus etwa nach [FuY73]).
Der nächste Schritt besteht in der Ausarbeitung der Restriktionen für stabil sphärischeKlassen in KO0
(Pβk+1), die durch die Adams-Operationen gegeben werden. Für n von der
Form 8m + 7 wurde dies oben bereits durchgeführt. Die Wirkung von ψ3 auf den Sum-manden Z ist leicht über den Chern-Charakter zu bestimmen, bis auf die Fälle k = 0 undn gerade folgt, daß das Bild von hKO hier trivial sein muß. Für die Z/2 und Z/2 ⊕ Z/2 -Summanden liefern die Adams-Operationen keine Einschränkungen. Die niedrig dimen-sionalen Berechnungen legen nun die Vermutung nahe, daß alle Klassen, die nicht durchdie ψ3-Restriktionen ausgeschlossen werden, im Bild von hKO liegen. Das ist tatsächlichrichtig, für n − k ungerade ist dies ein Korollar eines tieferen Resultats von Mahowald (sie-he [Mah82, 7.14]), für n − k gerade scheint dies unbekannt zu sein, läßt sich jedoch auf denungeraden Fall zurückführen.

9.5 Gauß-Abbildungen in K-Theorie 569
Satz 9.5.12. Das Bild des Hurewicz-Homomorphismus
hKO ∶ πsn(Pn−k) ≅ {P
βk+1 , S
8t} �→ kon(Pn−k) ≅ KO0(Pβ
k+1)
ist gleich dem Kern von ψ3 − 34t . Dies sind die Gruppen Z für k = 0 und n gerade,Z/21+min{ϕ(k), ν2(n+1)} für n ≡ 3 mod 4 und alle Z/2-Summanden aus der letzten Ta-belle. Hier ist β ein (8t − 1)-dimensionales Negativ von (n + 2)λRk+1 .
Anstelle der zu langenHerleitung ([Kna10]) beschreibenwir nur die verwendeteMetho-de. Für die Elemente der Ordnung 2 ist der Beweis jedoch ganz leicht. Zur Konstruktionvon Elementen greift man auf Periodizitätsoperatoren, die in KO-Theorie Isomorphismeninduzieren, wie etwa die in (7.4.12) eingeführten stabilen Abbildungen
F ∶ P2s−1(R)(2i+9)λ → P2s−1(R)(2i+1)λ
zurück. Schreibt man die Thom-Räume als Quotienten projektiver Räume, induziert Feinen Homomorphismus
F∗ ∶ πsj(P∞(R)/P2i+8(R)) �→ πs
j(P∞(R)/P2i(R)).
Wir kürzen die unter der Voraussetzung, daß der Einhängungshomomorphismus σ∞ bijek-tiv ist, definierte Komposition
γ ∶ πsn(Pn−k)
σ∞
←� [Sn ,Pn−k]R∗
�→ πn(SO/SO(n − k)) ∂1�→ STn−k(Sn)
mit γ ab. Metastabil gilt γ = (Ξkn)−1 bzw. bis auf die Identifikation πs
n(P∞(R)/Pn−k−1(R)) ≅{Pβ
k+1 , Sb} ist γ die Abbildung (Sk
n)−1 . Gegeben sei jetzt ein bo-primäres Bündel ξ aus
STn−k(Sn) ⊂ πn−1(SO(n − k)) mit n − k ungerade. Die stabilen Homotopieklassen x j =
F j∗ ○ γ−1([ξ]) ∈ πs
n(Pn−k−8 j) definieren Bündel γ([x j]), solange σ∞ surjektiv ist, etwa für16 j ≤ n − 2k − 1. Mit Hilfe der Eigenschaft, daß F in reeller K-Theorie einen Isomorphis-mus induziert, kann man dann zeigen, daß auch γ([x j]) ein bo-primäres Bündel ist, alsohKO ○ Sk
n ○ γ([x j]) ≠ 0 gilt.Etwas weiter weg von der Geometrie kann man auch direkt mit Operatoren auf Pβ
k+1arbeiten: Dazu komponiert man etwa für k gerade und n ungerade einen Periodizitätsope-rator F ∶ Pk+1(R)
(n−k)λ → Pk+1(R)(n−k−8)λ mit der Inklusion i ∶ Pk+1(R)
(n−k−8)λ �→
Pk+9(R)(n−k−8)λ und wendet S-Dualität an. Man erhält so eine stabile Abbildung
Fβ ∶ Pβk+9 �→ Pβ
k+1 (9.5.13)
mit einemNegativ β von (n+2)λ. Da der von der zu i S-dualen Abbildung in KO∗ induzier-te Homomorphismus injektiv ist, folgt aus der Isomorphieeigenschaft von D(F)∗ die Injek-tivität von (Fβ)∗ ∶ KO0
(Pβk+1) �→ KO0
(Pβk+9). Jede Klasse x ∈ {P
βk+1 , S
a}mit hKO(x) ≠ 0liefert dann unter Iterationen von Fβ Elemente x j = (Fβ) j∗(x)mit hKO(x j) ≠ 0. Die Sum-manden Z/2 für k ≤ 3 in obiger Tabelle lassen sich so direkt fortsetzen, zunächst für k

570 9 Vektorbündel im metastabilen Bereich
gerade, n ungerade. Durch Komposition mit der Hopf-Abbildung η, Einschränken oderAbspalten eines Schnitts erhält man dann die restlichen Z/2-Summanden. In den ande-ren Dimensionen ist das Vorgehen ähnlich, das Hauptproblem ist hier, daß man zunächstnoch Startelemente der richtigen Ordnung für die Anwendung von Fβ zu konstruieren hat.Nicht alle dazu benötigten werden nämlich durch die Bündel (τSn)⟨−k⟩ bereits gegeben.Eine Konstruktionsmethode wird in [Mah82, 7.15] vorgeführt, alternativ kann man die in(9.4.33) erwähnte einsetzen.
Solange man also den metastabilen Bereich nicht verläßt, erhält man so aus bo-primären Bündeln periodische Familien. Dies ist nach der Bott- und der James-Periodizitätein weiteres periodisches Phänomen in den metastabilen Homotopiegruppen von SO(n).
Man beachte, daß auch das Beispiel P∞(R), also die Bestimmung derjenigen Klassen inπs∗(P∞(R)), die sich durchK-Theorie entdecken lassen oder genauer das Bild derHurewicz-
Abbildung hKO ∶ πs∗(P∞(R)) �→ ko∗(P∞(R)) ⊂ KO∗(P∞(R)) im letzten Satz mit enthal-
ten ist. Man erhält als Bild eine Gruppe von der gleichen Gestalt wie Bild(J) ⊂ πs∗(S0)(2) .
9.5.2 Die Ordnung der Bündelreduktion (τSn)⟨−k⟩.
Dieser Abschnitt enthält die Bestimmung der Ordnung der Bündel (τSn)⟨−k⟩ und ist unab-hängig vom Rest.
Der folgende Satz gilt zwar für alle (τSn)⟨−k⟩, wir leiten ihn jedoch aus beweistechni-schen Gründen bei ungeradem k nur für bestimmte Bündelreduktionen her. Dazu legenwir Bündelreduktionen ξn ,k wie folgt fest: Für k = ρ(n + 1) − 1 wählen wir ξn ,k wie in(9.4.28), sodaß das Schnitthindernis e′(ξn ,k) nach (9.4.29) für einen weiteren Schnitt inBild(J) ⊂ πs
∗(S0)(2) liegt. Für k < ρ(n + 1) − 1 wählen wir ein (τSn)⟨−k−1⟩ und setzen
ξn ,k ∶= i⊕([(τSn)⟨−k−1⟩]), sodaß hier e′(ξn ,k) = 0 gilt. Im Folgenden unterscheiden wirnicht zwischen einem Bündel und seiner Klebeabbildung, kürzen ρ(n + 1) mit ρ ab undsetzen implizit die fast immer erfüllte Metastabilitätsbedingung voraus, sodaß wir die Iso-morphie STn−k(Sn) ≅ {Pβ
k+1 , Sa} aus (9.4.20) verwenden dürfen.
Satz 9.5.14. Es sei n = 24d+b(2l + 1) − 1 mit 0 ≤ b ≤ 3, k ≤ ρ(n + 1) − 1 = 8d + 2b − 1mit 4d + b ≥ 3. Für gerades k sei (τSn)⟨−k⟩ eine beliebige Bündelreduktion von τSn inπn−1(SO(n − k)), für ungerades k sei (τSn)⟨−k⟩ = ξn ,k gewählt wie oben. Dann hat(τSn)⟨−k⟩ im metastabilen Bereich die Ordnung
∣(τSn)⟨−k⟩∣ =
⎧⎪⎪⎪⎨⎪⎪⎪⎩
21+ϕ(k) k /≡ 3mod 422+ϕ(k) k ≡ 3mod 4 und d > 0 oder k < ρ − 121+ϕ(k) k ≡ 3mod 4 mit d = 0 und k = ρ − 1
Beweis: Für die Ordnung von (τSn)⟨−k⟩ oder äquivalent von xn ,k = Skn([(τSn)⟨−k⟩]) lie-
fert die K-Theorie eine untere Schranke. Da hKO(xn ,k) ∈ KO0(Pβ
k+1) ≅ Z/21+ϕ(k) ein Erzeu-gendes ist, hat diesemindestens denWert 21+ϕ(k). Nun ist für k ≡ 0mod 2 die stabile Einhän-

9.5 Gauß-Abbildungen in K-Theorie 571
gungsordnung von Pβk+1 nach (7.4.11) aber ebenfalls 2
1+ϕ(k), es folgt 21+ϕ(k) ⋅ {Pβk+1 , S
a} = 0und die Behauptung ist für gerades k bewiesen.
Ab jetzt sei k ungerade. Wir leiten zunächst eine obere Schranke für die Ordnung herund erledigen die Fälle k ≡ 1, 5 mod 8. Wir arbeiten ähnlich wie im Beweis zu (5.1.11) mitdem kommutativen Diagramm aus Stabilisierungssequenzen
πn(Sn−k)
πn−1(SO(n − k − 1)) πn−1(SO(n − k)) πn−1(Sn−k−1) πn(Sn−k)
πn−1(SO(n − k + 1))
��△
��
⋅2
��i⊕
��p∗
��i⊕
∼
(9.5.15)Nach dem ersten Schritt hat i⊕([(τSn)⟨−k⟩]) ∈ πn−1(SO(n− k+ 1)) die Ordnung 21+ϕ(k−1),deshalb gibt es ein z ∈ πn(Sn−k)
△(z)=21+ϕ(k−1) ⋅ [(τSn)⟨−k⟩] (9.5.16)
Für k < ρ − 1 gilt p∗([(τSn)⟨−k⟩]) = 0, da [(τSn)⟨−k⟩] nach Wahl von ξn ,k im Bild von i⊕liegt. Für k = ρ − 1 gilt p∗([(τSn)⟨−k⟩]) = J(ωk) in πs
k(S0) nach (9.4.29). Da n − k gerade
ist, ist p∗ ○△ die Multiplikation mit 2. Es folgt
21+ϕ(k−1) ⋅ p∗([(τSn)⟨−k⟩]) = p∗ ○△(z)= 2z.
Wegen 1 + ϕ(k − 1) ≥ 1 + ν2(k + 1) = ν2(∣J(ωk)∣) ist der linke Term in dieser Gleichung inbeiden Fällen 0, es folgt 2z = 0 und damit
22+ϕ(k−1) ⋅ [(τSn)⟨−k⟩] = 0.
Für k ≡ 1 mod 8 ist ϕ(k − 1) = ϕ(k) − 1 und Einsetzen ergibt 21+ϕ(k) ⋅ [(τSn)⟨−k⟩] = 0. Fürk ≡ 5 mod 8 und k < ρ − 1 hat man [(τSn)⟨−k⟩] = i⊕([(τSn)⟨−k−1⟩]) und ∣[(τSn)⟨−k−1⟩]∣ =
21+ϕ(k+1) = 21+ϕ(k), woraus ebenfalls die Behauptung ∣[(τSn)⟨−k⟩]∣ = 21+ϕ(k) folgt. Der Fallk ≡ 5 mod 8 und k = ρ − 1 kommt nicht vor.
Es bleiben die Fälle k ≡ 3 mod 4. Hier gilt ϕ(k− 1) = ϕ(k), sodaß man nur die Abschät-zung 22+ϕ(k) ⋅ [(τSn)⟨−k⟩] = 0 erhält. Diese obere Schranke wird tatsächlich angenommen,aber nicht immer. Die Ausnahmefälle sind d = 0 und k ≡ 3 mod 4 mit k = ρ − 1. In denrestlichen Fällen k ≡ 3 mod 4, also b = 2 oder 3, hat (τSn)⟨−k⟩ die Ordnung 22+ϕ(k) .
Diese Ordnungserhöhung hängt, wie das folgende Argument zeigt, eng mit Eigenschaftder Bündel (τSn)⟨−k⟩ , bo-primär zu sein, zusammen.
Wir untersuchen das Element
zk ∶= 21+ϕ(k) ⋅ [(τSn)⟨−k⟩].
Im Folgenden sei immer k ≡ 3 mod 4 vorausgesetzt und zunächst k < ρ − 1. Das dannexistierende Bündel (τSn)⟨−k−1⟩ hat die Ordnung 21+ϕ(k+1) , deshalb ist
yk ∶= 2ϕ(k+1) ⋅ [(τSn)⟨−k−1⟩]

572 9 Vektorbündel im metastabilen Bereich
ein Element der Ordnung 2, das wegen ϕ(k + 1) = ϕ(k)+ 1 und derWahl der Bündelreduk-tionen (τSn)⟨−r⟩ unter i⊕ gerade auf zk abgebildet wird:
zk = i⊕(yk) = 21+ϕ(k) ⋅ [(τSn)⟨−k⟩].
Wäre nun zk trivial, so wäre yk ein Element in ker(i⊕) = Bild(Δ) in der Stabilisierungsse-quenz, also der oberen Zeile des kommutativen Diagramms (9.4.21)
πn(Sn−k−1)△
�→ STn−k−1(Sn)i⊕
�→ STn−k(Sn)p∗
�→ πn−1(Sn−k−1) →
≅ ↓ σ∞
≅ ↓ Sk+1n ≅ ↓ Sk
n ≅ ↓ σ∞
{Sk+1+a , Sa}D(i5)∗�→ {Pβ
k+2 , Sa}
D(p5)∗�→ {Pβ
k+1 , Sa}
δ�→ {Sk+a , Sa}
↓ hKO ↓ hKO ↓ hKO ↓ hKO
KO0(Sk+1)
D(i5)∗�→ KO0
(Pβk+2)
D(p5)∗�→ KO0
(Pβk+1) �→ KO0
(Sk)
,
(9.5.17)d.h. von der Form
yk = Δ([ f ]) = f ∗([τSn−k−1]).
Wir zeigen jetzt durch Vergleich der Adams-Filtrierungen in K-Theorie, daß es ein solchesf nicht geben kann, dann folgt zk ≠ 0 und [(τSn)⟨−k⟩]muß von der Ordnung 22+ϕ(k) sein.Zunächst zeigt die Berechnung von ∣hKO(xn ,r)∣ = 21+ϕ(r) aus (9.5.8)
hKO(Sk+1n (yk)) = hKO(2ϕ(k+1) ⋅ xn ,k+1) ≠ 0 und hKO(Sk
n(zk)) = 0
Mit obigem Diagramm übersetzt sich die Gleichung yk = Δ([ f ]) in Sk+1n (yk) =
D(i5)∗([g]) für ein [g] aus {Sk+1 , S0}. Nun vertauscht hKO mit D(i5)∗, deshalb mußwegen hKO(Sk+1
n (yk)) ≠ 0 auch hKO([g]) ≠ 0 gelten. Wegen KO0(Sk+1) ≅ Z und der
endlichen Ordnung von g ist dies aber unmöglich, also gilt zk ≠ 0.
Im Fall k = ρ − 1 steht das Bündel (τSn)⟨−k−1⟩ nicht zur Verfügung, aber (τSn)⟨−k⟩
wurde so gewählt, daß nach (9.4.29) p∗([(τSn)⟨−k⟩]) = J(ωk) in πsk(S
0)(2) gilt. Da n − k
ungerade ist, ist p∗ ○ Δ die Multiplikation mit 2 und wie oben folgt
p∗(2 ⋅ [(τSn)⟨−k⟩] − Δ(J(ωk))) = 0,
sodaß es ein τ ∈ STn−k−1(Sn)mit i⊕(τ) = 2 ⋅ [τSn−k] − Δ(J(ωk)) gibt. Wir setzen jetzt
zk ∶= 2ϕ(k) ⋅ (2 ⋅ [(τSn)⟨−k⟩] − Δ(J(ωk))) = i⊕(2ϕ(k) ⋅ τ)
und gehen mit den so modifizierten Elementen so vor wie oben. Da D(p5)∗ in der unterenZeile des letzten Diagramms surjektiv ist, folgt aus der bekannten Ordnung von hKO(xn ,k)wieder
hKO(Sk+1n (2ϕ(k) ⋅ τ)) ≠ 0 und hKO(Sk
n(zk)) = 0
und dem Vergleich der Adams-Filtrierungen schließlich
zk ∶= 2ϕ(k)+1 ⋅ [(τSn)⟨−k⟩] − 2ϕ(k) ⋅ Δ(J(ωk)) ≠ 0.

9.5 Gauß-Abbildungen in K-Theorie 573
Ist jetzt d > 0, so gilt, wie oben bereits verwendet, 2ϕ(k) ⋅ J(ωk) = 0 und damit 2ϕ(k)+1 ⋅[(τSn)⟨−k⟩] ≠ 0. Für d = 0 hingegen ergibt sich Folgendes: Jetzt ist der zweite Term in zk ,nämlich 2ϕ(k) ⋅ Δ(J(ωk)), von Null verschieden, 2ϕ(k)+1 ⋅ [(τSn)⟨−k⟩] verschwindet undes gibt daher keine Ordnungserhöhung. Um dies einzusehen, verwenden wir noch einmaldas Diagramm (9.5.15). Die Klasse zk läßt sich wegen i⊕(zk) = 2ϕ(k)+1 ⋅ [(τSn)⟨−k+1⟩] = 0auch als Δ(z)mit z ∈ πn(Sn−k) darstellen. Wegen zk ≠ 0 gilt z ≠ 0 und wie oben sieht man2 ⋅ z = 0. Für d = 0 und k = ρ − 1, hat man die Werte von n mit b = 2, k = 3 sowie b = 3mit k = 7 und l > 0 zu betrachten. Dann ist aber πs
k(S0)(2) zyklisch und sowohl z wie auch
2ϕ(k) ⋅ J(ωk) sind nichttriviale Elemente der Ordnung 2, also gleich. Aus der Gleichung
Δ(z) = zk = 2ϕ(k)+1 ⋅ [(τSn)⟨−k⟩] − 2ϕ(k) ⋅ Δ(J(ωk))
folgt dann 2ϕ(k)+1 ⋅ [(τSn)⟨−k⟩] = 0 und der Beweis ist vollständig.
Beispiele. Wir betrachten als Beispiel den Ausnahmefall d = 0, k = ρ − 1. Die ersten Grup-pen hierzu (mit l = 1, also n = 11, k = 3 und n = 23, k = 7) sind:
ST11−3(S11) ≅ Z/23 ⊕Z/23 und ST23−7(S23) ≅ Z/24 ⊕Z/24 ⊕Z/2
mit den Erzeugenden (τS11)⟨−3⟩ , ν∗(τS8), bzw. (τS23)⟨−7⟩ , σ∗(τS16) und (ν2)∗(τS17)⟨−1⟩ .Die anderen Werte von n (mit l > 1) erhält man hieraus mit James-Periodizität (9.3.2), wo-mit der Ausnahmefall sogar vollständig abgedeckt ist. Mit der vorliegenden Informationüber die Stabilisierungssequenz und die ersten stabilen Homotopiegruppen der Sphärenläßt sich dies leicht nachrechnen. Lediglich der Z/2-Summand in ST23−7(S23) ist mit unse-ren Methoden nicht zugänglich. Man findet ihn und das repräsentierende Bündel etwa mitHilfe der Stabilisierungssequenz und der Tabelle in [Mah67, table 4.1], auf die auch für eineunabhängige Berechnung verwiesen sei.
Bemerkungen.
1. Für das Bündel zk = 21+ϕ(k) ⋅ [(τSn)⟨−k⟩] der Ordnung 2 für k ≡ 3 mod 4 und d > 0oder k < ρ − 1 gilt zwar hKO(Sk
n(zk)) = 0, man kann aber zeigen, daß die e-Invariantevon Sk
n(zk) nicht verschwindet.
2. Für i ≡ 0, 1, 2, ..., 7 stehen in KO0(Si) nur in den zwei Dimensionen i ≡ 1, 2 Elemente,
die stabil sphärisch sein können (in positiven Dimensionen) zur Verfügung, währendsich die Ordnung von xn ,k für 8 aufeinander folgende Werte von k aber viermal än-dert. Dies erklärt, warum esmindestens zweimal zu einer Ordnungserhöhung kommenmuß.
3. Der im letzten Beweis verwendete Satz von Toda (9.4.29) läßt sich vermeiden. Die ver-wendeten Beziehungen 1 + ϕ(k − 1) ≥ ν2(∣J(ωk)∣) und 0 = 2ϕ(k) ⋅ △(J(ωk)) für d ≥ 1kann man ersetzen durch 21+ϕ(k−1) ⋅ πs
k(S0)(2) = 0 und 2ϕ(k) ⋅ ker(hAd ∶ πs
k(S0)(2) �→
Adk(S0)) = 0, die man etwa mit dem hier nicht bewiesenen Satz von Kahn-Priddyzusammen mit (7.4.2) herleiten kann.
4. Eine ähnliche Ordnungserhöhung beobachtet man bei der Transferabbildung tr ∈{Pn , S0}, siehe [Muk88] und (7.4.8).

574 9 Vektorbündel im metastabilen Bereich
9.5.3 Der Vektorfeldsatz nach Toda
Der Satz (9.4.29) hat zahlreiche Anwendungen, die erste, die wir hier besprechen, ist einalternativer Zugang zum Vektorfeldsatz, der weitestgehend unabhängig von den bisher be-sprochenen Versionen ist und die Beweisidee aus (3.3.10) verallgemeinert. Dieses Vorge-hen geht ebenfalls auf Toda zurück, damals wurde es, wie schon angedeutet, jedoch nichtganz ausgeführt. Als Folgerung erhält man die Isomorphie SVektR(Pm(R)) ≅ J(Pm(R))und dies zeigt die Äquivalenz dieser Aussage zum Vektorfeldsatz. Die Beweisidee läßt sichwie folgt zusammenfassen: Man beginnt mit der in Satz (9.4.29) konstruierten (n − ρ(n))-dimensionale Bündelreduktion ξ von τSn−1 , die ρ(n) − 1 Vektorfelder auf Sn−1 entspricht.Nach (9.4.29) ist das Hindernis für einen weiteren Schnitt in ξ ein Erzeugendes der Bild(J)-Untergruppe in πs
ρ(n)−1(S0)(2) . Dann vergleicht man dieses Hindernis mit demjenigen für
ρ(n) Vektorfelder auf Sn−1 in der allgemeinen Stabilisierungssequenz und zeigt mittels dere-Invarianten, daß das letztere nicht verschwindet.
Korollar 9.5.18. Sn−1 hat höchstens ρ(n) − 1 orthogonale Vektorfelder.
Um die Herleitung kurz und übersichtlich zu halten, verwenden wir die Berech-nung der e-Invarianten auf J(πm−1(SO)) in der Umformulierung mittels des Hurewicz-Homomorphismus hAd ∶ πi
s(X) → Adi(X), zusammengefaßt in folgendem Satz (siehe(7.2.25)):
Satz 9.5.19. Für m > 1 haben die Komposition KO−1(Sm)(2)
J�→ π0
s (Sm)(2)
hAd�→
Ad0(Sm) und die kanonische Abbildung△ ∶ KO−1(Sm)(2) → Ad0(Sm) gleiches Bild, d.h.
für das Erzeugende ωm−1 ∈ [Sm−1 , SO] = KO−1(Sm) gilt△(ωm−1) = c ⋅ hAd ○ J(ωm−1)
mit einer Konstante c /≡ 0mod 2.
Die Herleitung des Vektorfeldsatzes geschieht jetzt in mehreren Schritten:Wir verwenden die Bezeichnungen aus dem Beweis von (9.4.29). Gegeben sei eine (n −ρ)-dimensionale Bündelreduktion ξ von τSn−1 deren Homotopie-Euler-Klasse e′(ξ) =J(ωρ−1) ∈ πs
ρ−1(S0) = πn−2(Sn−1−ρ) ein Erzeugendes in Bild(J) ist. Das Hindernis für ρVektorfelder auf Sn−1 oder eine (n − ρ − 1)-dimensionale Bündelreduktion für τSn−1 ist dieKlasse p∗(cτSn−1) in πn−2(SO(n − 1)/SO(n − ρ − 1)) in der allgemeinen Stabilisierungsse-quenz, der oberen Zeile in folgendem Diagramm (mit m ∶= n − ρ − 1):
→ πn−2(SO(m)) → πn−2(SO(n − 1))p∗
→ πn−2(SO(n − 1)/SO(m))↑ ↑ ∂0 ∥
πn−1(SO(n)/SO(m)) → πn−1(SO(n)/SO(n − 1))∂′2→ πn−2(SO(n − 1)/SO(m))
∥ ↑ p1∗ ↑ i∗
πn−1(SO(n)/SO(m)) → πn−1(SO(n)/SO(n − ρ)) ∂2→ πn−2(Sm)
,

9.5 Gauß-Abbildungen in K-Theorie 575
dessen Kommutativität man ähnlich wie in (9.4.17) leicht herleitet. Die Gauß-AbbildungidSn−1 = gτSn−1 wird unter ∂0 auf die Klebeabbildung cτSn−1 abgebildet und da wir die Gauß-Abbildung gξ als Schnitt von p1∗ gewählt haben, folgt p1 ○ gξ ≃ gτSn−1 . Zusammen mit∂2([gξ]) = e′(ξ) aus (9.4.29) ergibt sich damit
i∗(e′(ξ)) = i∗ ○ ∂2([gξ]) = ∂′2 ○ p1∗([gξ]) = ∂′2([gτSn−1]) = p∗([cτSn−1]).
Während die Homotopie-Euler-Klasse e′(ξ) von der Auswahl von ξ abhängt und füreine andere Wahl von ξ möglicherweise verschwinden könnte, ist ihr Bild unter i∗ inπn−2(SO(n − 1)/SO(n − ρ − 1)) davon unabhängig. Sobald man die Nichttrivialität voni∗(e′(ξ)) = p∗([cτSn−1]) für eine geeignete Wahl von ξ gezeigt hat, ist der Vektorfeldsatzhergeleitet, denn aus p∗([cτSn−1]) ≠ 0 folgt, daß es keine (n−ρ− 1)-dimensionale Bündelre-duktion für τSn−1 geben kann. Der folgende Satz schließt damit diesen dritten Beweis desVektorfeldsatzes ab:
Satz 9.5.20. Das Erzeugende J(ωρ−1) ∈ πn−2(Sn−1−ρ) von Bild(J) wird unter i∗ ∶πn−2(Sn−ρ−1) �→ πn−2(SO(n − 1)/SO(n − ρ − 1)) nichttrivial abgebildet.
Beweis. Nun ist in πn−2(SO(n− 1)/SO(n− ρ− 1)) i.A. eine Bild(J)-Untergruppe gar nichtdefiniert, aber über denHurewicz-Homomorphismus hAd lassen sich Elemente aus Bild(J)unter Abbildungenweiter verfolgen.Dazu faktorisierenwir i zunächst über die Spiegelungs-abbildung R ∶ Pn−2/Pn−ρ−2 ⊂ SO(n − 1)/SO(n − ρ − 1), die hier im metastabilen Dimen-sionsbereich eine injektive Abbildung in Homotopie induziert. Dann dualisieren wir dieSequenz
Sn−2 J(ωρ−1)�→ Sn−ρ−1 i
�→ Pn−2/Pn−ρ−2 ≅ P(n−ρ−1)λρ−1
mittels S-Dualität zuSa+1 D(J(ωρ−1))
←� Sa+ρ D(i)←� Pα+λ
ρ−1 .
Hier ist α wieder ein a-dimensionaler Repräsentant für [−nλRρ−1]s und a ausreichend groß.Nach Wahl von ρ = ρ(n) ist α trivial. Die stabile Abbildung D(J(ωρ−1)) ist wieder einErzeugendes von Bild(J), denn Abbildungen zwischen Sphären sind zu sich selbst dual(bis auf ein Vorzeichen). Die Abbildung D(i) ist als S-duale Abbildung zur Inklusion deruntersten Zelle die Projektion auf die oberste Zelle, sodaß wir die letzte Sequenz auch als
Sa+1 J(ωρ−1)←� Sa+ρ i3
←� ΣaPλρ−1 (≃ Σ
aPρ)
schreiben können. Mit Hilfe des kommutativen Diagramms (ρ > 2)
πa+1s (Sa+ρ)
i∗3�→ πa+1
s (ΣaPλρ−1)
↓ hAd ↓ hAd
Ada+1(Sa+ρ)i∗3�→ Ada+1(ΣaPλ
ρ−1)
↑ △ ↑ △
KOa(Sa+ρ)
i∗3�→ KOa
(ΣaPλρ−1)

576 9 Vektorbündel im metastabilen Bereich
zeigen wir jetzt J(ωρ−1) ○ i3 /≃ 0. Wegen (9.5.19) reicht es, △ ○ i∗3 (ωρ−1) ≠ 0 inAda+1(ΣaPλ
ρ−1) = Ad 1(Pλρ−1) nachzuweisen. Zunächst ist i∗3 (ωρ−1) ∈ KO0
(Pλρ−1) =
KO0(Pρ) ein nichttriviales Element der Ordnung 2, denn die zu Pρ−1 ⊂ Pρ
i3→ Sρ gehörende
exakte Sequenz zeigt, daß in den vorliegenden Dimensionen die Ordnung der KO-Gruppebeim Übergang von Pρ−1 auf Pρ um den Faktor 2 zunimmt. Da ψ3 − 1 auf KO0
(Pρ) trivialist, ist△ ∶ KO0
(Pρ) → Ad 1(Pρ) = Ada+1(ΣaPλρ−1) injektiv und die Behauptung folgt.
Der Fall ρ = 2 betrifftdieHopf-Abbildung η = J(ω1) ∈ π−1s (S0)undbildet insofern eineAus-nahme, da η anders als die übrigen Bild(J)-Elemente eine nichttriviale Abbildung in reellerK-Theorie induziert, d.h. es gilt hKO(η) ≠ 0mit demHurewicz-Homomorphismus der reel-len K-Theorie. Man zeigt deshalb mit einer leichten Rechnung direkt i∗3 (hKO(η)) ≠ 0.
Korollar 9.5.21. KO0(Pm(R)) ≅ J(Pm(R))
Beweis. Der letzte Beweis zeigt zunächst J(−nλRm) ≠ 0 für m = ρ(n), denn sonst wä-re p∗(cτSn−1) = 0. Damit ist das Element der Ordnung 2 in KO0
(Pm(R)) nicht J-trivialund KO0
(Pm(R)) ≅ J(Pm(R)) folgt. Mit diesem Argument erhält man die Dimensionen0, 1, 2, 4 mod 8, bei denen die Ordnung von λRm sich gerade geändert hat. Für die restlichenDimensionen wählt man denWert vonm in der Inklusion i ∶ Pm−1(R) ⊂ Pm(R) so, daß dieAussage für m − 1 schon bewiesen ist, i∗ ∶ KO0
(Pm(R)) → KO0(Pm−1(R)) bijektiv ist und
betrachtet dann die Gruppenordnungen im kommutativen Diagramm
KO0(Pm(R))
J↠ J(Pm(R))
≅ ↓ i∗ ↓ i∗
KO0(Pm−1(R))
J↠ J(Pm−1(R))
.
9.5.4 Anwendungen
Eine weitere unmittelbare Anwendung von (9.4.29) betrifft die Bündel γ∗(τSm) für Abbil-dungen γ ∶ Sm+r → Sm . Wir können uns dabei an die Diskussion der Rolle von τSm in derStabilisierungssequenz halten (3.3.2), indem wir idSm durch γ ersetzen. Dort ergab sich dieTrivialität von τSm aus den beiden Tatsachen△([idSm ]) = [cτSm ] und [idSm ] ∈ Bild(p∗).
In der Stabilisierungssequenz
→ [Sn−2 , SO(n − ρ)]p∗
�→ [Sn−2 , Sn−ρ−1]△
�→ [Sn−3 , SO(n − ρ − 1)] →
mit den zu (9.4.29) passend gewählten Dimensionen, n ≥ 16, ρ = ρ(n) wird△([γ]) für γ ∶Sn−2 → Sn−ρ−1 durch das Bündel γ∗(τSn−ρ−1) in +Vektn−ρ−1R (Sn−2) ≅ [Sn−3 , SO(n− ρ− 1)]

9.5 Gauß-Abbildungen in K-Theorie 577
repräsentiert, d.h. es gilt △([γ]) = [cγ∗(τSn−ρ−1)]. Das Bild(J)-Erzeugende J(ωρ−1) ∈
πsρ−1(S0) ≅ [Sn−2 , Sn−ρ−1] repräsentieren wir durch eine Abbildung γn−ρ−1 ∶ Sn−2 �→
Sn−ρ−1. Halten wir die Potenz ν2(n) von 2 in n fest, so ist ρ = ρ(n) konstant und manerhält beispielsweise
ν2(n) = 1 ρ(n) = 2 γn−3 ∶ Sn−2 �→ Sn−3 repräsentiert die Hopf-Abbildung ην2(n) = 2 ρ(n) = 4 γn−5 ∶ Sn−2 �→ Sn−5 repräsentiert die Hopf-Abbildung νν2(n) = 3 ρ(n) = 8 γn−9 ∶ Sn−2 �→ Sn−9 repräsentiert die Hopf-Abbildung σ
Nach (9.4.29) liegt mit den gewählten Dimensionen die Klebeabbildung [γn−ρ−1] alsHomotopie-Euler-Klasse e′(ξ) = p∗([cξ]) einer (n − ρ)-dimensionalen Bündelreduktionvon τSn−1 im Bild von p∗ und γ∗n−ρ−1(τSn−ρ−1)muß trivial sein, es folgt
Korollar 9.5.22. Für n ≥ 16, ρ = ρ(n) und einen Repräsentanten γn−ρ−1 ∶ Sn−2 �→
Sn−ρ−1 des Bild(J)-Erzeugenden J(ωρ−1) ∈ πsρ−1(S0) ist das Bündel γ∗n−ρ−1(τSn−ρ−1)
trivial.
So sind beispielsweise die Bündel η∗4m−1(τS4m−1), ν∗8m−1(τS8m−1), σ∗16m−1(τS16m−1) (miteinem Extraargument für einige niedrigdimensionale Fälle) alle trivial. Im Unterschiedzum Tangentialbündel τS2m−1 selbst, das nur für m = 1, 2, 4 trivial ist, sind in einer Se-rie γ∗n−ρ−1(τSn−ρ−1)mit konstantem ρ, also festem J(ωρ−1), immer unendlich viele Bündeltrivial.
Wir behandeln noch kurz zur Illustration die Frage, wie man die Nichttrivialität solcherBündel herleiten kann, obwohl dies keine Anwendung von (9.4.29) ist. Der von uns bespro-chene Beweis für [τSm] ≠ 0 läßt sich nicht direkt übertragen, es ist aber metastabil eineÜbersetzung in ein stabiles Problem möglich. Dazu läßt man die Verbindung zwischen nund ρ fallen, und betrachtet zu festem r Repräsentanten γm ∶ Sr−1+m �→ Sm des Bild(J)-Erzeugenden J(ωr−1) ∈ πs
r−1(S0)(2) . Der metastabile Bereich ist hier durch r < m gegeben,nach dem allgemeinen Einhängungssatz gibt es dann immer einen solchen Repräsentantenund γ∗m(τSm) ist definiert. Die Ursprungssphäre für J(ωr−1) hat aber, wie bereits bespro-chen, eine viel niedrigere imWesentlichen nur von der Ordnung von J(ωr−1) abhängendeDimension, siehe (7.3.32).
Es gilt △([γm]) = [cγ∗m(τSm)] ≠ 0 genau dann, wenn die zugehörige Gauß-Abbildung
gγ∗m(τSm)∶ Sr+m−1 → SO(r +m + 1)/SO(m) nichttrivial ist. Dies folgt direkt aus (9.1.1), hier
braucht man r < m. Solche Gauß-Abbildungen liegen aber bereits im stabilen Dimensions-bereich, man kann sie über Pr+m/Pm−1 faktorisieren, S-Dualität anwenden und ähnlich vor-gehen wie für (9.5.18). Die Übersetzung endet beimNachweis, daß das Bild(J)-Erzeugendeunter q∗ ∶ {Sr+a , Sa+1} �→ {Pα
r , Sa+1} nichttrivial abgebildet wird. Hier ist α wieder eina-dimensionales Negativ von (r+m+ 1)λRr - wobei jetzt nicht [(r+m+ 1)λRr−1]s = 0 voraus-gesetzt ist - und q ∶ Pα
r → Sr+a die Projektion auf die oberste Zelle. Ob q∗(J(ωr−1)) ≠ 0 gilt,kann man jetzt mit Hilfe des Hurewicz-Homomorphismus hAd der Bild(J)-Theorie unddamit mittels K-Theorie versuchen herzuleiten. Man erhält so natürlich nur ein hinreichen-des Kriterium. Für r = 1 ist die Rechnung noch einfach, man erhält leicht [η∗m(τSm)] ≠ 0

578 9 Vektorbündel im metastabilen Bereich
fürm /≡ 3 mod 4 (siehe auch (3.3.21)), aber für größereWerte von r wird sie schnell unüber-sichtlich, da man genaue Informationen über KO∗(Pa/Pb) benötigt.
Für gerade Werte von m und r ≡ 0 mod 4, wenn also die Ordnung von J(ωr−1) min-destens 8 beträgt, hat man über die Stabilisierungssequenz ein fast triviales Argument oh-ne Rechnungen für [γ∗m(τSm)] ≠ 0. Diese Bündel lassen nämlich keinen Schnitt zu, ihreHomotopie-Eulerklasse e′ ist nichttrivial. Ist γm eine Einhängung γm = Σγm−1 , so folgt diesaus der Natürlichkeit von e′. Mit cγ∗m(τSm
)≃ cτSm ○ γm−1 folgt, ähnlich wie in (5.1.12):
e′(γ∗m(τSm)) = p∗([cγ∗m(τSm)]) = p∗([cτSm ○ γm−1]) = p∗([cτSm ]) ○ [γm−1] = [2] ○ [γm−1]
und diese Klasse stabilisiert zu 2 ⋅ J(ωr−1) ≠ 0.Die Resultate von James zur 2-lokalen EHP-Sequenz und deren Beziehung zur Stabili-
sierungssequenz erlauben auf die Einhängungsvoraussetzung zu verzichten:
Proposition 9.5.23. Es sei γ2m ∶ Sr−1+2m �→ S2m ein Repräsentant des Bild(J)-Erzeugenden J(ωr−1) ∈ πs
r−1(S0)(2) und r durch 4 teilbar, dann ist das Bündel γ∗2m(τS2m)nicht trivial.
Beweis. Falls das Bündel γ∗2m(τS2m) trivial ist, ist es erst recht faserhomotopietrivial, seineKlebeabbildung liegt also im Kern des J-Homomorphismus. Mit (8.3.14) folgt
J([cγ∗2m(τS2m)]) = J ○△([γ2m]) = P ○ E2m+1([γ2m]) = 0,
sodaß sich [α] ∶= E2m+1([γ2m]) nach (8.2.15) als James-Hopf-Invariante [α] = γ2([β])einer Abbildung β ∶ Sr+4m → S2m+1 schreiben läßt. Das Resultat von James (8.3.17), nämlich
2 ⋅ πk(S2t+1) ⊂ Bild(E)
ermöglicht dann den gleichen Schluß wie oben: Da 2 ⋅ [β] im Bild von E liegt, folgt γ2(2 ⋅[β]) = 2 ⋅ γ2([β]) = 2 ⋅ [α] = 0, aber [α] hat mindestens die Ordnung 8.
Die nächste Frage nach einem Nachweis von [γ∗m(τSm)] ≠ 0 ist die nach der Maximal-zahl der Schnitte in diesem Bündel. Auch hier liefert (9.4.29) einen Beitrag. Da man jetztdas erste nichttriviale Schnitthindernis in einer Bündelreduktion (τSn)⟨−r⟩ kennt, folgt, zu-mindest wenn γm = Σγm−1 eine Einhängung ist, mit Natürlichkeit die Gleichung
e′(γ∗m(τSn)⟨−r⟩) = γ∗m−1(e′(τSn)⟨−r⟩)
und man erhält eine Aussage über das erste Schnitthindernis von γ∗m((τSn)⟨−r⟩). Stabil,also in πs
r+k−1(S0), ist γ∗m−1(e′((τSn)⟨−r⟩)) dann ein Produkt von Bild(J)-Klassen, deren
Produkte sind aber bekannt. Im Folgenden halten wir das Bild(J)-Erzeugenden J(ωr−1) ∈
πsr−1(S0) fest und betrachten nur Bündel γ∗m(τSm) für die γm ∶ Sr−1+m �→ Sm zu J(ωr−1)
stabilisiert. Das Schnittverhalten dieser Bündel folgt dann einem bestimmten von der Rest-klasse vonmmod2s mit genügend großem s, abhängigenMuster.Wir geben einenAusblick.Das Beispiel η∗m(τSm) mit der Hopf-Abbildung η wurde bereits erwähnt (3.3.21). Einmal

9.5 Gauß-Abbildungen in K-Theorie 579
gibt es immer eine Restklassem1 für die γ∗m1(τSm1) trivial ist (9.5.22). Für eine weitere Rest-
klasse m2 besitzt γ∗m2(τSm2) eine mit dem 2-Anteil in m2 + c (c konstant) unbeschränkt
steigende Anzahl von Schnitten, ganz ähnlich wie für τS8m−1. Dies beruht auf Relationenzwischen Bündelreduktionen und induzierten Bündeln. Die ersten drei Beispiele, von de-nen wir das erste bereits kennen, sind
η∗(τS4m+2) ≅ 2 ⋅ ((τS4m+3)⟨−1⟩) auf S4m+3ν∗(τS8m+5) ≅ η∗((τS8m+7)⟨−2⟩) auf S8m+8
σ∗(τS16m+11) ≅ ν∗((τS16m+15)⟨−4⟩) auf S16m+18
Auf diese Weise liefern Vektorfelder auf S8m−1 Schnitte in γ∗m(τSm). Für die anderen Rest-klassen ist die Schnittanzahl jeweils beschränkt.
Wir haben gesehen, daß das Whitehead-Produkt [im , im] das Bild der KlebeabbildungcτSm des Tangentialbündels τSm unter dem J-Homomorphismus ist. Im Wesentlichen ausNatürlichkeitsgründen erhält man im metastabilen Bereich als weitere Folgerungen von(9.5.22) Verschwindungsaussagen für Whitehead-Produkte:
Korollar 9.5.24. Für n ≥ 16, n mit ρ = ρ(n) ≥ 2 und γn−ρ−1 ∶ Sn−2 �→ Sn−ρ−1 als Re-präsentanten des Bild(J)-Erzeugenden J(ωρ−1) ∈ πs
ρ−1(S0) ist das Whitehead-Produkt[in−ρ−1 , γn−ρ−1] trivial.
Beweis. Mit (8.3.1), (8.3.4) folgt J(γ∗n−ρ−1(τSn−ρ−1)) = ±[in−ρ−1 , γn−ρ−1] und aus (9.5.22)die Behauptung.
Beispiele. Für die Hopf-Abbildungen η, ν und σ hat man
[im , ηm] = 0 für m ≡ −1 mod 4[im , νm] = 0 für m ≡ −1 mod 8[im , σm] = 0 für m ≡ −1 mod 16
.
Bemerkung. Für das Verschwinden des Whitehead-Produkts [im , γm] ist also[γ∗m(τSm)] = 0 hinreichend, jedoch nicht unbedingt notwendig, beispielsweise gilt[i29 , ν29] = 0 aber [ν∗29(τS29)] ≠ 0.
Für die weiteren zum Teil schon erwähnten Anwendungen von (9.5.22), wie etwa zurBerechnung von Differentialen in der EHP-Spektralsequenz oder der Atiyah-Hirzebruch-Spektralsequenz für π∗s (Pn(R)) oder der Untersuchung der anheftenden Abbildungen imCW-Komplex Pn(R)müssen wir auf die Literatur, etwa auf die sehr empfehlenswertenDar-stellungen in [Rav86] und [MiR93] verweisen.





























