Embed Size (px)
Citation preview

0pr0300.ppt
Dipl.-Ing. Alfred PrucknerDipl.-Ing. Sven Fischer
15th ADAMS USER CONFERENCEROM, 15. - 16. November 2000
INSTITUT FÜRKRAFTFAHRWESENAACHEN
Vehicle DynamicsControl for a4 Wheel SteeringPrototype Car
0pr0300.ppt
- Control Strategy
- Development Method
- Side Slip Angle Observation
- Side Slip Angle Control
- Control Strategy
- Outlook
Overview

0pr0300.ppt
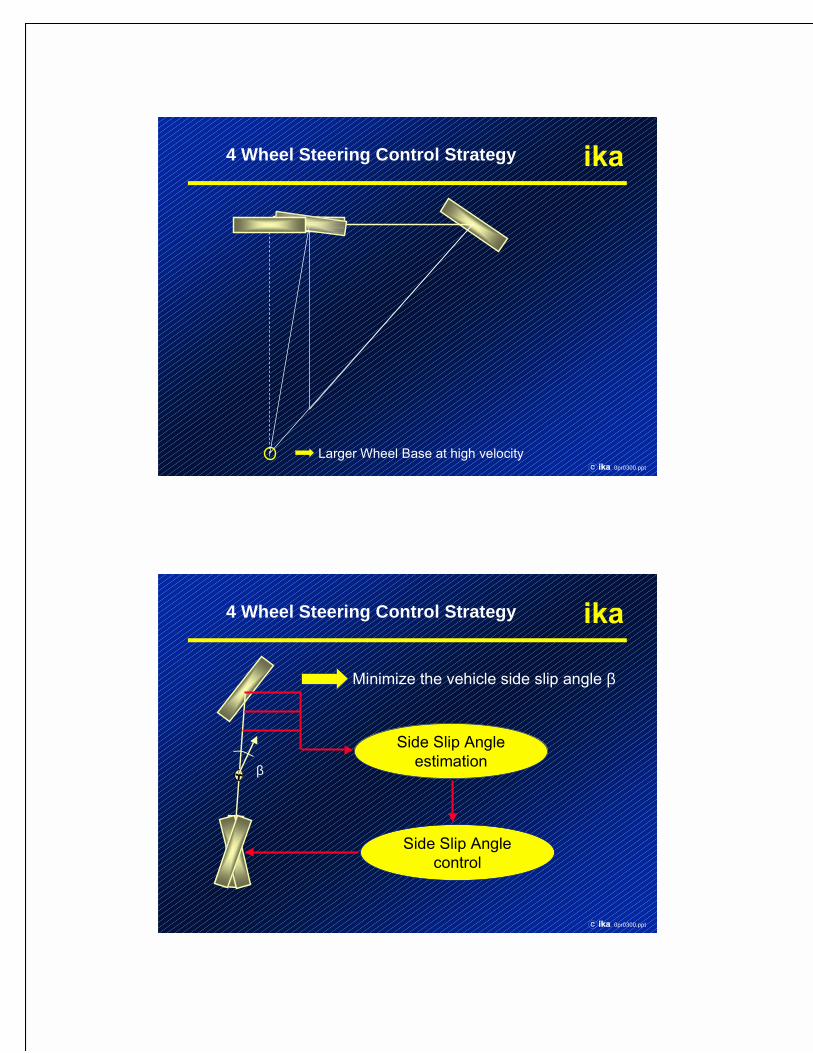
4 Wheel Steering Control Strategy
β
Vehicle Side Slip Angle ββββ
Steady State Cornering
-4
-3
-2
-1
0
1
2
3
0 1 2 3 4 5 6 7 8 9lateral acceleration [m/s²]
v
ehic
le s
ide
slip
ang
le [
° ]
Steady State Cornering
-4
-3
-2
-1
0
1
2
3
0 1 2 3 4 5 6 7 8 9lateral acceleration [m/s²]
v
ehic
le s
ide
slip
ang
le [
° ]
dry road
icy road
0pr0300.ppt
Smaller Wheel Base at low velocity
4 Wheel Steering Control Strategy
0pr0300.ppt
Larger Wheel Base at high velocity
4 Wheel Steering Control Strategy
0pr0300.ppt
4 Wheel Steering Control Strategy
β
Minimize the vehicle side slip angle β
Side Slip Angleestimation
Side Slip Anglecontrol

0pr0300.ppt
- Control Strategy
- Development Method
- Side Slip Angle Observation
- Side Slip Angle Control
Overview
- Outlook
0pr0300.ppt
Virtual Prototyping
Measurement
Control information

0pr0300.ppt
MATRIXxControl algorithm
MATRIXxControl algorithm
ADAMSFull Vehicle Model
ADAMSFull Vehicle Model
C-CodeControl algorithm
C-CodeControl algorithm
FORTRAN-filesVARSUBTIRSUBTIRSUB
Subroutine Template
Interface ADAMS und MATRIXx
discrete time interval
Virtual Prototyping
0pr0300.ppt
- Control Strategy
- Development Method
- Side Slip Angle Observation
- Side Slip Angle Control
Overview
- Outlook
0pr0300.ppt
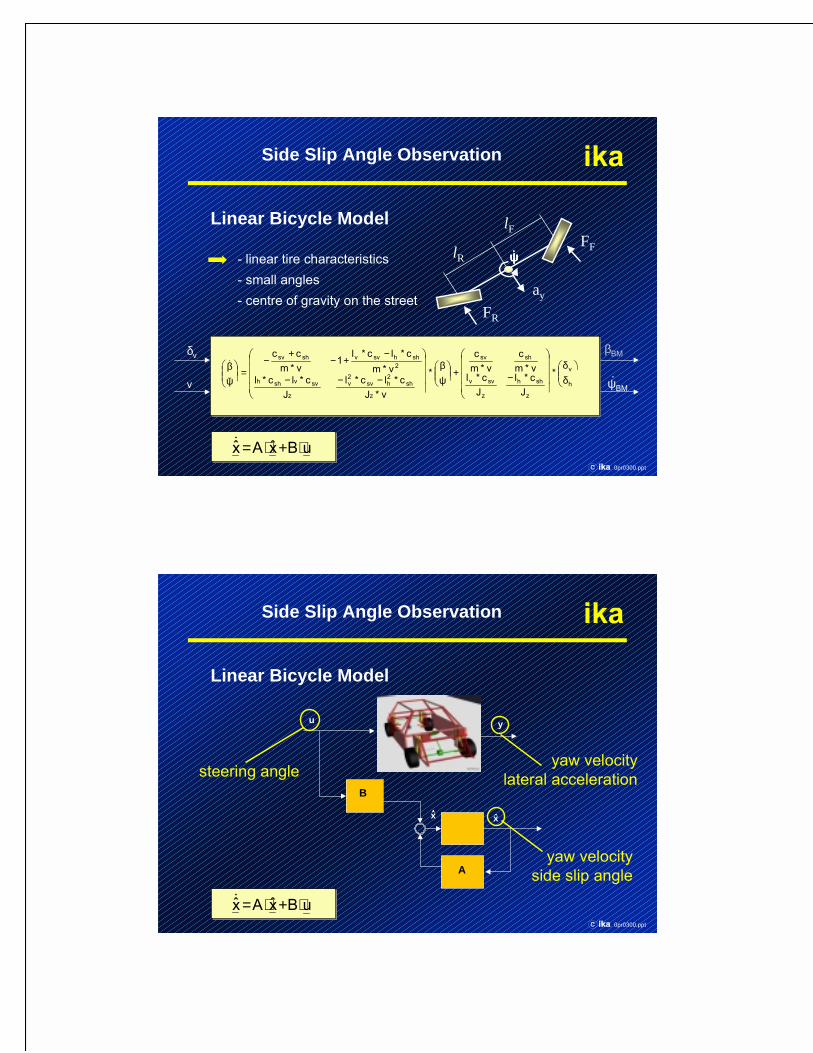
Side Slip Angle Observation
- linear tire characteristics- small angles- centre of gravity on the street
FF
FR
lR
lF
ay
ψψψψ.
δv
v ψBM.
βBM�
���
�
δδ
�����
����
�
�
−+���
���
�
ψβ
�����
����
�
�
−−−
−+−
+−
=���
���
�
ψβ
h
v
z
shh
z
svv
shsv
z
sh2hsv
2v
z
svvshh
2shhsvvshsv
*
Jc*l
Jc*l
v*mc
v*mc
*
v*Jc*lc*l
Jc*lc*l
v*mc*lc*l
1v*mcc
���
�
Linear Bicycle Model
uBxAx ⋅+⋅=�
0pr0300.ppt
Side Slip Angle Observation
A
B
u y
x���� x
Linear Bicycle Model
uBxAx ⋅+⋅=�
steering angleyaw velocity
lateral acceleration
yaw velocityside slip angle

0pr0300.ppt
Side Slip AngleObservation
Dry Road
ADAMS
Bicycle Model
Double Lane Change ManeuvreDry Road
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
4 5 6 7 8 9 10 11 12time [s]
ve
hicl
e si
de s
lip a
ngle
[ ° ]
ADAMS
Bicycle Model
Double Lane Change ManeuvreDry Road
-40
-30
-20
-10
0
10
20
30
4 5 6 7 8 9 10 11 12time [s]
yaw
vel
ocity
[°/s
]
ADAMS
Bicycle Model
0pr0300.ppt
Side Slip AngleObservation
Icy Road
ADAMS
Bicycle Model
Double Lane Change ManeuvreIcy Road
-40
-30
-20
-10
0
10
20
4 5 6 7 8 9 10 11 12time [s]
v
ehic
le s
ide
slip
ang
le [
° ]
ADAMS
Bicycle Model
Double Lane Change ManeuvreIcy Road
-80
-60
-40
-20
0
20
40
60
80
4 5 6 7 8 9 10 11 12time [s]
yaw
vel
ocity
[°/s
]
ADAMS
Bicycle Model

0pr0300.ppt
A
B
u y
x���� x
�x Ax Bu= +
Linear Observer
Cy +
-
L
( )yy LuBxAx −+⋅+⋅=�
( )[ ] yy LuBxAuBxAxxx~ −+⋅+⋅−⋅+⋅=−= ���
( ) x~ LCAx~ −=� ( )( ) ( )∏ −=−−=
n
1iiλ1 LCA I det
Side Slip Angle Observation
0pr0300.ppt
Non-Linear Observeru y
C
L
x(((( )))) (((( ))))(((( ))))yyu,xLu,xfx −−−−−−−−====����
+-y
( ) ( ) ( ) ( )xxu,xxfu,xfxu,xfx −⋅
∂∂+== ��
( ) ( ) ( ) ( )yyu,xLxxu,xxfxxx~ −⋅−−⋅
∂∂=−= ��
�
( ) ����
�
λλ
=����
���
�
�
ψ∂∂
β∂∂⋅��
����
�−
�����
����
�
�
ψ∂ψ∂
β∂ψ∂
ψ∂β∂
β∂β∂
=2
1yy
2221
1211
00aa
10
llll
u,xF�
�
����
�
��
x
Side Slip Angle Observation

0pr0300.ppt
Side Slip AngleObservation
Icy Road
ADAMS
Bicycle Model
LuenbergerObserver
Double Lane Change ManeuvreIcy Road
-40
-30
-20
-10
0
10
20
4 5 6 7 8 9 10 11 12time [s]
v
ehic
le s
ide
slip
ang
le [
° ]
ADAMS
Bicycle Model
Luenberger Observer
Double Lane Change ManeuvreIcy Road
-80
-60
-40
-20
0
20
40
60
80
4 5 6 7 8 9 10 11 12time [s]
yaw
vel
ocity
[°/s
]
ADAMSBicycle ModelLuenberger Observer
0pr0300.ppt
Side Slip AngleObservation
Dry RoadWet Road
ADAMS
Bicycle Model
LuenbergerObserver
Double Lane Change ManeuvreDry Road
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
4 5 6 7 8 9 10 11 12time [s]
v
ehic
le s
ide
slip
ang
le [
° ]
ADAMS
Bicycle ModelLuenberger Observer
Double Lane Change Maneuvre Wet Road
-15
-10
-5
0
5
10
15
4 5 6 7 8 9 10 11 12time [s]
v
ehic
le s
ide
slip
ang
le [
° ]
ADAMS
Bicycle ModelLuenberger Observer

0pr0300.ppt
Side Slip AngleObservation
Dry RoadIcy Road
ADAMS
Bicycle Model
LuenbergerObserver
Steady State Cornering Dry Road
-4
-3
-2
-1
0
1
2
3
0 1 2 3 4 5 6 7 8 9lateral acceleration [m/s²]
v
ehic
le s
ide
slip
ang
le [
° ]
ADAMS
Bicycle Model
Luenberger Observer
Steady State Cornering Dry Road
-4
-3
-2
-1
0
1
2
3
0 1 2 3 4 5 6 7 8 9lateral acceleration [m/s²]
v
ehic
le s
ide
slip
ang
le [
° ]
ADAMS
Bicycle ModelLuenberger Observer
0pr0300.ppt
- Control Strategy
- Development Method
- Side Slip Angle Observation
- Side Slip Angle Control
Overview
- Outlook

0pr0300.ppt
Side Slip Angle Control
Bicycle Model Controller
A
B
u y
x���� x
uBxAx ⋅+⋅=� kββββu
1
Dstat_
V
H
Ti1Ti1kk
⋅⋅⋅⋅ωωωω⋅⋅⋅⋅++++⋅⋅⋅⋅ωωωω⋅⋅⋅⋅++++⋅⋅⋅⋅====
δδδδδδδδ==== ββββββββ
Static Transfer Function
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0 1 2 3 4 5 6 7 8 9
lateral acceleration [m/s²]
Stee
ring
Rat
io
r /
f
smaller wheel base at low velocity
larger wheel base
at high velocity
characteristic velocity
0pr0300.ppt
Side Slip Angle Control
State Space Controlleru y
C
L
x(((( )))) (((( ))))(((( ))))yyu,xLu,xfx −−−−−−−−====����
+-y
( )u,xfx =�
x
K+
-
xwanted
uBxAuufx
xfx ∆⋅+∆⋅=∆⋅��
�
�
∂∂+∆⋅���
�
�
∂∂=∆�
Ricatti Equation
(((( )))) (((( )))) (((( )))) (((( )))) QkAkPkA1kP 0T* ++++⋅⋅⋅⋅⋅⋅⋅⋅====++++
(((( )))) (((( )))) (((( )))) (((( )))) (((( )))) (((( )))){{{{ }}}} 1*T*T RkB1kPkBkB1kP1kK −−−−++++⋅⋅⋅⋅++++⋅⋅⋅⋅⋅⋅⋅⋅++++====++++
(((( )))) (((( )))) (((( )))) (((( )))) (((( ))))1kPkB1kK1kP1kP *TT*0 ++++⋅⋅⋅⋅⋅⋅⋅⋅++++−−−−++++====++++
0pr0300.ppt
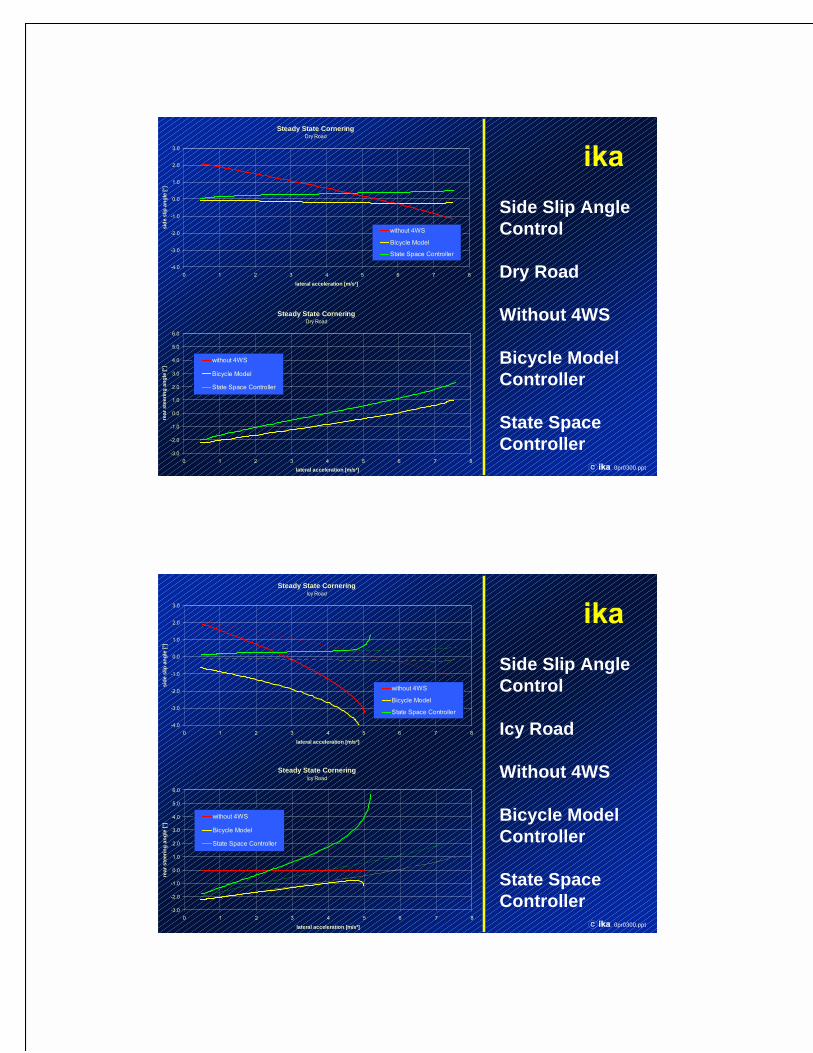
Side Slip AngleControl
Dry Road
Without 4WS
Bicycle ModelController
State SpaceController
Steady State CorneringDry Road
-4.0
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
0 1 2 3 4 5 6 7 8lateral acceleration [m/s²]
side
slip
ang
le [°
]
without 4WS
Bicycle Model
State Space Controller
Steady State CorneringDry Road
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
6.0
0 1 2 3 4 5 6 7 8lateral acceleration [m/s²]
rear
ste
erin
g an
gle
[°]
without 4WS
Bicycle Model
State Space Controller
0pr0300.ppt
Side Slip AngleControl
Icy Road
Without 4WS
Bicycle ModelController
State SpaceController
Steady State CorneringIcy Road
-4.0
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
0 1 2 3 4 5 6 7 8lateral acceleration [m/s²]
side
slip
ang
le [°
]
without 4WS
Bicycle Model
State Space Controller
Steady State CorneringIcy Road
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
6.0
0 1 2 3 4 5 6 7 8lateral acceleration [m/s²]
rear
ste
erin
g an
gle
[°]
without 4WS
Bicycle Model
State Space Controller
0pr0300.ppt
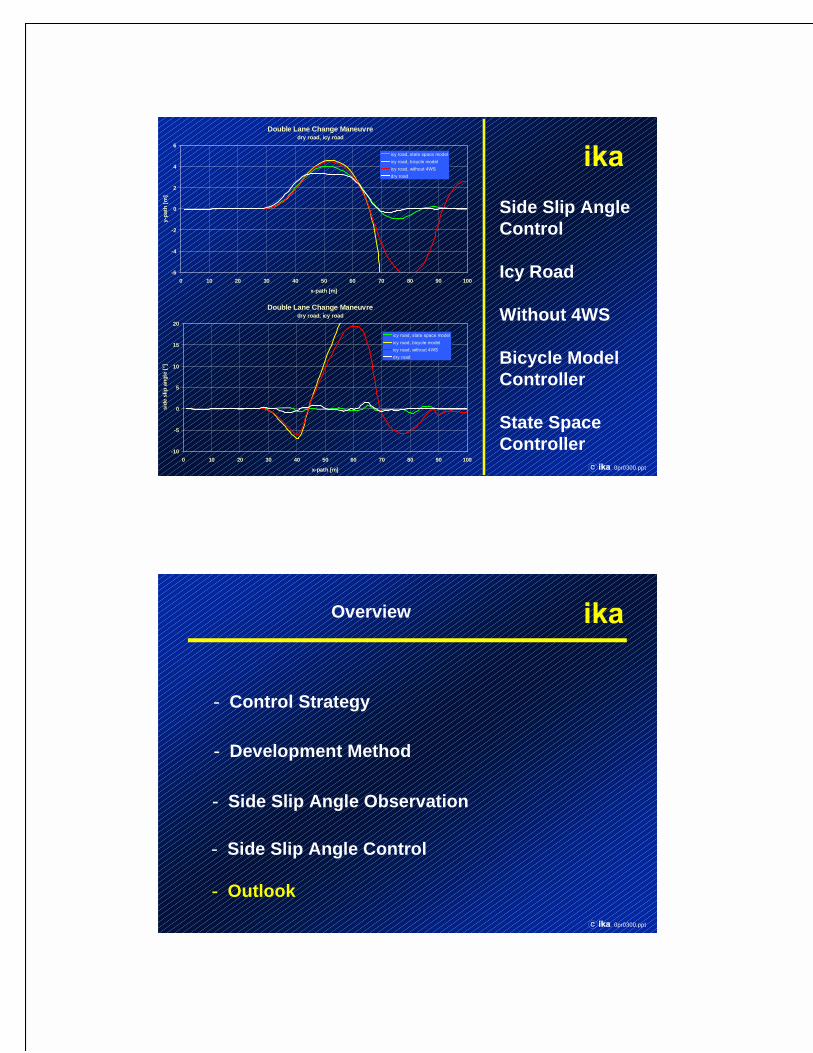
Side Slip AngleControl
Icy Road
Without 4WS
Bicycle ModelController
State SpaceController
Double Lane Change Maneuvredry road, icy road
-6
-4
-2
0
2
4
6
0 10 20 30 40 50 60 70 80 90 100x-path [m]
y-pa
th [m
]
icy road, state space modelicy road, bicycle modelicy road, without 4WSdry road
Double Lane Change Maneuvredry road, icy road
-10
-5
0
5
10
15
20
0 10 20 30 40 50 60 70 80 90 100x-path [m]
side
slip
ang
le [°
]
icy road, state space modelicy road, bicycle modelicy road, without 4WSdry road
0pr0300.ppt
- Control Strategy
- Development Method
- Side Slip Angle Observation
- Side Slip Angle Control
Overview
- Outlook

0pr0300.ppt
Outlook
Virtual PrototypingMeasurement
Control information C - Code
���� Software Rapid Prototyping
0pr0300.ppt
Dipl.-Ing. Alfred PrucknerDipl.-Ing. Sven Fischer
15th ADAMS USER CONFERENCEROM, 15. - 16. November 2000
INSTITUT FÜRKRAFTFAHRWESENAACHEN
Vehicle DynamicsControl for a4 Wheel SteeringPrototype Car





























