Embed Size (px)
Citation preview

Variations on a Flat Theme
Jean LEVINE
CAS,Ecole des Mines de Paris
Dedicated to Michel Fliess for his 60th birthday
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Some Historical Considerations
Differential Flatness has been introduced by the gang of the four(Michel Fliess, Pierre Rouchon, Philippe Martin and myself) in 1991.
About 400 citations of the 1995 Int. J. Control paper (according toScholar Google).
Major contributions to the development of this concept have also beenmade by Richard Murray, Jean-Baptiste Pomet, Joachim Rudolph,Hebertt Sira-Ramirez and many others.
Happy birthday, Michel!Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
A tribute to the Gang of the 4
Celebration of Flatness 10th anniversary in Mexico, November 2003.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Recalls on Differentially Flat Systems
Definition
The nonlinear systemx = f (x,u), with x = (x1, . . . , xn): stateandu = (u1, . . . ,um): control, m≤ n.is (differentially) flatif and only if there existsy = (y1, . . . , ym) suchthat:
y and its successive derivativesy, y, . . . , are independent,
y = h(x,u, u, . . . ,u(r)) (generalized output),
Conversely,x andu can be expressed as:x = ϕ(y, y, . . . , y(α)), u = ψ(y, y, . . . , y(α+1))
with ϕ ≡ f (ϕ,ψ).The vectory is called aflat output .
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Main advantages of Flatness
1 Direct open-loop trajectory computation, without integration noroptimization.
2 Local stabilization of any reference trajectoryusing theequivalence between the system trajectories and those of
y(α+1) = v.
“Flatness-Based Control” = Trajectory Planning+ Trajectory Tracking.
Alternative approach toPredictive Control(see e.g. Fliess and Marquez 2001, Delaleau and Hagenmeyer 2006,Devos and Levine 2006).
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Consequence on motion planning
To every curvet 7→ y(t) enoughdifferentiable, there corresponds atrajectory
t 7→(
x(t)u(t)
)=(
ϕ(y(t), y(t), . . . , y(α)(t))ψ(y(t), y(t), . . . , y(α+1)(t))
)that identically satisfies the systemequations.
x = f (x ,x ,u)
y(α+1)+1) = v
Lie-BLie-Bäcklundklund
t → (x (t), u(t))))
t → (y(t), . . . , y(α+1)+1)(t))))
•
(ϕ,ψ)(ϕ,ψ)
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Example: Linear Motor with Auxiliary Masses (I)Single Mass Case
Model:
Mx = F − k(x− z)− r(x− z)mz = k(x− z) + r(x− z)
Aims:
Rest-to-rest fast and high precisiondisplacements.
Measurements:
x andx measured,
z not measured.
mass
flexible beam
bumper
linear motorrail
In collaboration with Micro-Controle.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Flat output:
y =r2
mkx +
(1− r2
mk
)z− r
kz
x = y +rk
y +mk
y, z = y +rk
y
F = (M + m)(
y +rk
y(3) +Mm
(M + m)ky(4))
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Videos
mass
flexible beam
bumper
linear motorrail
Mass=disturbance Input filtering
Flatness-based
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
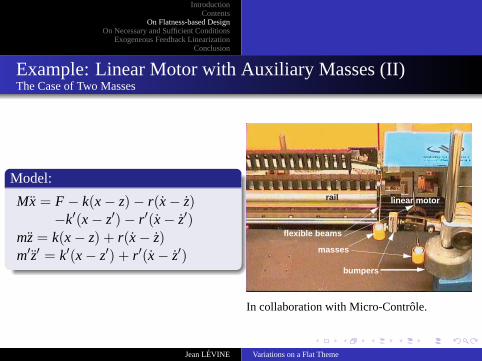
Example: Linear Motor with Auxiliary Masses (II)The Case of Two Masses
Model:
Mx = F − k(x− z)− r(x− z)−k′(x− z′)− r ′(x− z′)
mz = k(x− z) + r(x− z)m′z′ = k′(x− z′) + r ′(x− z′)
linear motor
masses
bumpers
flexible beams
rail
In collaboration with Micro-Controle.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Flatness:
x = y +(
rk
+r ′
k′
)y +
(mk
+m′
k′+
rr ′
kk′
)y
+(
mr′ + rm′
kk′
)y(3) +
mm′
kk′y(4)
z = y +(
rk
+r ′
k′
)y +
(m′
k′+
rr ′
kk′
)y +
rm′
kk′y(3)
z′ = y +(
rk
+r ′
k′
)y +
(mk
+rr ′
kk′
)y +
mr′
kk′y(3)
F = My + M
(rk
+r ′
k′
)y(3) +
(mk
M′ + Mm′
k′+ M
rr ′
kk′
)y(4)
+(
mr′
kk′M′ + M
rm′
kk′
)y(5) +
Mmm′
kk′y(6)
with M = (M + m+ m′), M = M + m andM′ = M + m′.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Videos
linear motor
masses
bumpers
flexible beams
rail
Masses=disturbance Input filtering
Flatness-based
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Combined trajectory planning and output feedbackThe US Navy Crane Example (B. Kiss, J.L., P. Mullhaupt 2000)
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Example of Infinite Dimensional Flat System: Riser ToWell-head Connection (R. Sabri et al., 2003)
Reduced scale set-up(in collaboration with IFP)
Motorsflexible
riser
synchronized
digital
cameras
actuatorsmotors
simulating
the wave
excitation
well-head
water tank
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
PDE system: flexible riser displacements in the water
r∂2u∂t2
= EA∂2u∂s2 + (EI − h0Te)
∂3w∂s3
∂2u∂s2 + Fτ
ra∂2w∂t2
= − (EI − h0Te)∂4w∂s4 + EA
(∂u∂s∂2w∂s2 + h0
(∂2u∂s2
∂3w∂s3 +
∂u∂s∂4w∂s4
))+h0rs
(s∂4w∂s4 +
∂3w∂s3
)+ (Te + rss)
∂2w∂s2 + rs
∂w∂s
+ Fν
Boundary conditionsw(L, t) = xA(t)
EI∂2w∂s2 (L) = 0
u(L, t) = zA(t)− z0
FτFν
s
(s-ds)p
φ
pipe
ST
u(s,t)
w(s,t)
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Flatness-based control using a modal approximation of the PDEmodel (2 first horizontal modes and 0th vertical mode)
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
References: Sufficient Conditions
Input affine systems:1 input: equivalence between static and dynamic feedbacklinearization(Charlet, Levine and Marino 89, 91);n− 1 inputs + [first-order controllability]: always flat(Charlet,Levine and Marino 89);2 inputs and 4 states:1-flatness(Pomet 97).
Driftless systems:2 inputs: rank conditions on the flag of codistributions(Martinand Rouchon 94) ;n−2 inputs: always flat if controllable(Martin and Rouchon 95).
Non affine in the input case:n− 1 inputs (Martin 93).
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
References: Necessary Conditions
Ruled manifold (Sluis 93, Rouchon 94).
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
References: General Formulations
Find output functions ψ1, . . . , ψm and multi-integersl = (l1, . . . , lm) and r = (r1, . . . , rm), y = ψ(x,u, u, . . . ,u(l))(1),such that the differential system
dxi ∧ dψ1 ∧ . . . ∧ dψ(r1)1 ∧ . . . ∧ dψm∧ . . . ∧ dψ(rm)
m = 0i = 1, . . . ,n
duj ∧ dψ1 ∧ . . . ∧ dψ(r1+1)1 ∧ . . . ∧ dψm∧ . . . ∧ dψ(rm+1)
m = 0j = 1, . . . ,m
dψ1 ∧ . . . ∧ dψ(r1)1 ∧ . . . ∧ dψm∧ . . . ∧ dψ(rm)
m 6= 0is integrable (Martin 91, Pereira da Silva 99).Find an integrable basis of the tangent module
non exact Brunovsky forms(Pomet, Moog and Aranda 92,Chetverikov 2000),using prolongations(Franch 99).
1notation:u(l) = (u(l1)1 , . . . , u(lm)
m )Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
System Representation
Consider the systemx = f (x,u)
with x ∈ X, dimX = n, u ∈ Rm andf smooth vector field onX
satisfyingrank(
∂f∂u
)= m.
It is locally equivalent to the underdetermined implicit system:
F(x, x) = 0
with x ∈ X, dimX = n, rank(
∂F∂x
)= n−m.
Remark
This implicit representation is invariant by endogeneous dynamicfeedback.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
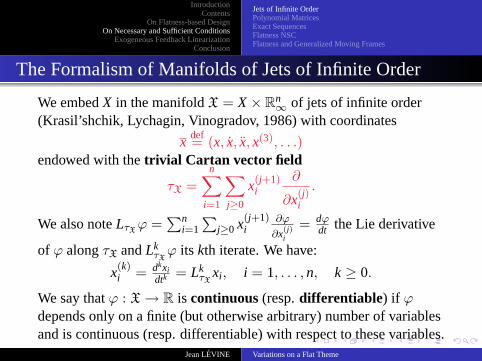
The Formalism of Manifolds of Jets of Infinite Order
We embedX in the manifoldX = X× Rn∞ of jets of infinite order
(Krasil’shchik, Lychagin, Vinogradov, 1986) with coordinates
xdef= (x, x, x, x(3), . . .)
endowed with thetrivial Cartan vector field
τX =n∑
i=1
∑j≥0
x(j+1)i
∂
∂x(j)i
.
We also noteLτXϕ =
∑ni=1
∑j≥0 x(j+1)
i∂ϕ
∂x(j)i
= dϕdt the Lie derivative
of ϕ alongτX andLkτXϕ its kth iterate. We have:
x(k)i = dkxi
dtk = LkτX
xi , i = 1, . . . ,n, k ≥ 0.
We say thatϕ : X → R is continuous(resp.differentiable) if ϕdepends only on a finite (but otherwise arbitrary) number of variablesand is continuous (resp. differentiable) with respect to these variables.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
A regular implicit control system is a triple(X, τX,F) withX = X×Rn
∞, τX its trivial Cartan field, andF ∈ C∞(TX; Rn−m) withrank
(∂F∂x
)= n−m in an open subset of TX.
SetX0 = x ∈ X|LkτX
F(x) = 0, ∀k ≥ 0.
Definition (flatness)
The system(X, τX,F) is flat at (x0, y0) ∈ X0 × Rm∞ if and only if
there exist coordinatesy of Rm and a locally smooth mappingψ : X → Rm such thaty = ψ(x), with y0 = ψ(x0);there exists a locally smooth mappingϕ : Rm
∞ → X withx0 = ϕ(y0), such thatx = ϕ(y, y, . . .) satisfiesLk
τXF(x) = 0 for
every smooth trajectoryt 7→ y(t) and everyk ≥ 0.
Shortly, the system(X, τX,F) is flat iff it is Lie-Backlund equivalentat (x0, y0) to thetrivial implicit system(Rm
∞, τRm∞ ,0).
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Denote
dF =∂F∂x
dx+∂F∂x
dx
and
P(F) =(∂F∂x
+∂F∂x
ddt
).
ThusdF = P(F)dx.
Theorem
The system(X, τX,F) is flat at(x0, y0) ∈ X0 × Rm∞ if and only if
there exists a local smooth invertible mappingΦ from Rm∞ to X0, with
smooth inverse, satisfyingΦ(y0) = x0, and such thatΦ∗dF = 0.
whereΦ∗dF is the (backward) image of the 1-formdF by Φ, namelyΦ∗dF = P(F)P(ϕ).
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Polynomial matrices
Notations:
K: field of meromorphic functions from X to R.
K[ ddt]: (non commutative)principal ideal ring of polynomials
of ddt with coefficients inK.
Mp,q[ ddt]: module ofp× q matrices overK[ d
dt].
Up[ ddt]: group of p× p unimodular matrices (invertible with
inverse inMp,p[ ddt])
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Right and Left Smith forms
Let M ∈ Mp,q[ ddt]. There existsU ∈ Uq[ d
dt] andV ∈ Up[ ddt] such that:
if p< q, V M U = (∆,0q−p) with ∆ = diagδ1, . . . , δp anddi
dividesdj for all 1≤ i ≤ j ≤ p;
if p> q, V M U =(
∆0p−q
)with ∆ = diagδ1, . . . , δq anddi
dividesdj for all 1≤ i ≤ j ≤ q.We say thatU ∈ R− Smith (M) andV ∈ L− Smith (M).
M is saidhyper-regular iff ∆ = I .
Remark
P(F) is hyper-regular iff the module associated to the variationalsystem of(X, τX,F) is free (thus controllable in the sense of Fliess(1990)).
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Theorem
Assume thatP(F) is hyper-regular.1 Every solution ofP(F)P(ϕ) = 0 is given by
P(ϕ) = U
(0n−m,m
Im
)W = UW
with U ∈ R− Smith (P(F)), U = U
(0n−m,m
Im
), and
W ∈ Um[ ddt] arbitrary;
2 There existsQ ∈ L− Smith(
U)
andZ ∈ Um[ ddt] such that
QP(ϕ) =(
Im
0n−m,m
)Z
and the module generated by theK[ ddt] combinations of them
first lines ofQdx is free.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Interpretation in terms of Exact Sequences of Modules
We denote byΛ1n the module generated bydx1, . . . ,dxn,
by Λ1n+q the module generated bydx1, . . . ,dxn,dξ1, . . . ,dξq
and byΛ1m a suitable module of 1-forms of dimensionm.
The previous result corresponds to the construction of the exactsequences:
0 −→ Λ1m
U−→ ker(P(F)) ∩ Λ1n
P(F)−→ Λ1n−m
and
0 −→ Λ1m
U−→ ker(P(F)) ∩ Λ1n
Q−→ Λ1m −→ 0
whereQ =(
Im
0n−m,m
)Q.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Flatness Necessary and Sufficient Conditions
Denote byωi = Qidx the ith line ofQdx, i = 1, . . . ,m, andω = (ω1, . . . , ωm)T.DefineΩ : K[ d
dt] ideal generated by the 1-formsω1, . . . , ωm.We say thatΩ is strongly closedif there existsM ∈ Um[ d
dt] such that
d(Mω) = 0.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Theorem (JL, NOLCOS 2004)
Assume thatP(F) is hyper-regular. The three assertions areequivalent:
(i) The system(X, τX,F) is flat;
(ii) The idealΩ = span ω1, . . . , ωm is strongly closed;
(iii) There exists anm×m matrixµ whose entries arepolynomials of d
dt with coefficients inΛ1n, and a matrix
M ∈ Um[ ddt] such that the“generalized moving frame
structure equations” hold true:
dω = µ ∧ ω, dµ = µ ∧ µ, dM = −Mµ.
with ω = (ω1, . . . , ωm)T.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
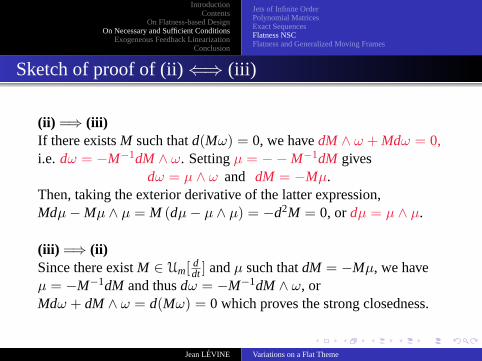
Sketch of proof of (ii)⇐⇒ (iii)
(ii) =⇒ (iii)If there existsM such thatd(Mω) = 0, we havedM ∧ ω + Mdω = 0,i.e. dω = −M−1dM ∧ ω. Settingµ = −−M−1dM gives
dω = µ ∧ ω and dM = −Mµ.Then, taking the exterior derivative of the latter expression,Mdµ−Mµ ∧ µ = M (dµ− µ ∧ µ) = −d2M = 0, ordµ = µ ∧ µ.
(iii) =⇒ (ii)Since there existM ∈ Um[ d
dt] andµ such thatdM = −Mµ, we haveµ = −M−1dM and thusdω = −M−1dM ∧ ω, orMdω + dM ∧ ω = d(Mω) = 0 which proves the strong closedness.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Necessary and Sufficient Conditions and GeneralizedMoving Frames
Assume that The system(X, τX,F) is flat.Define the manifoldΘ ⊂ Ω× Um[ d
dt], Θ 6= ∅:
Θ =
(ω,Mω)∣∣ω =
ω1...ωm
,Ω = span ω1, . . . ωm ,d(Mωω) = 0
Group of transformations:
T = f : Θ 7→ Θ | f (ω,Mω) = (ω′,Mω′) ω ω'
Mω Mω'
f
Θ
f ∈ T ⇐⇒ ∃T ∈ Um[ ddt] such thatω′ = Tω, Mω′ = MωT−1.
Thus:T identified withUm[ ddt] (unimodular group).
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Recalls on Cartan’s Method of Moving Frames
Consider the Euclidean spaceRN, the set of orthogonal frames(p,e1, . . . ,eN) and the groupSO(N,R). The group right action sendsa given frame(O, δ1, . . . , δN) to a frame(p,e1, . . . ,eN) with
−→Op = aδ, e = Aδ, δ = (δ1, . . . , δN)T, e = (e1, . . . ,eN)T.
Infinitesimal motions satisfy
dp = ωe, de= µe
where the 1-formsω andµ are therelative components of themoving frame. It can be seen thatω andµ are characterized by thestructure equations
dω = µ ∧ ω, dµ = µ ∧ µ.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Jets of Infinite OrderPolynomial MatricesExact SequencesFlatness NSCFlatness and Generalized Moving Frames
Back to Generalized Moving Frames for Flat Systems
The 1-formω and the polynomial valued 1-formµ may be seen as the(generalized) relative componentsof the generalized frames(ω,Mω) of Θ and
dω = µ ∧ ω, dµ = µ ∧ µ
are their(generalized) structure equations, with µ = −M−1ω dMω.
Remark
For non flat systems, we have:
dω = µ ∧ ω +$, d$ = µ ∧$, dµ = µ ∧ µ, dM = −Mµ
which suggests a (formal) characterization of flat submanifolds ofX
(see e.g. Chern, Chen and Lam).
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Exogeneous Feedback Linearization
Consider the systemx = f (x,u) with rank(
∂f∂u
)= m in a suitable
neighborhood, and a1st order regular exogeneous dynamicfeedback: u = α(x, ξ, v), ξ = β(x, ξ, v) with ξ ∈ Rq, v ∈ Rm and
rank
(∂α∂v
∂β∂v
)= m.
The systemx = f (x,u) is saidfeedback linearizable by 1st orderregular exogeneous dynamic feedbackif and only if there existq ∈ Nfinite,α andβ satisfying the above rank condition, such that theclosed-loop systemx = f (x, α(x, ξ, v)), ξ = β(x, ξ, v) is flat.
Theorem
The systemx = f (x,u) is feedback linearizable by 1st orderregular exogeneous dynamic feedback if and only if it is flat.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
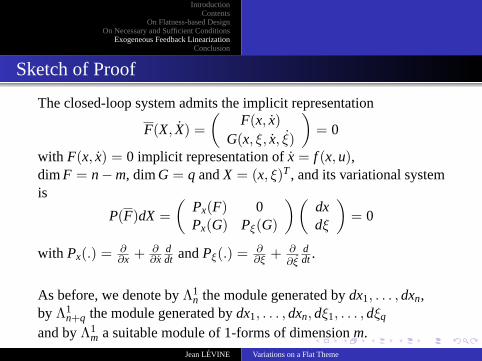
Sketch of Proof
The closed-loop system admits the implicit representation
F(X, X) =(
F(x, x)G(x, ξ, x, ξ)
)= 0
with F(x, x) = 0 implicit representation ofx = f (x,u),dimF = n−m, dimG = q andX = (x, ξ)T, and its variational systemis
P(F)dX =(
Px(F) 0Px(G) Pξ(G)
)(dxdξ
)= 0
with Px(.) = ∂∂x + ∂
∂xddt andPξ(.) = ∂
∂ξ + ∂∂ξ
ddt.
As before, we denote byΛ1n the module generated bydx1, . . . ,dxn,
by Λ1n+q the module generated bydx1, . . . ,dxn,dξ1, . . . ,dξq
and byΛ1m a suitable module of 1-forms of dimensionm.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ConsiderU ∈ R− Smith(P(F)
), U = U
(0n−m,m
Im
),
Q ∈ L− Smith(
U)
andQ =(
Im
0n−m,m
)Q.
We have the followingexact sequence:
0−→ Λ1m
U−→ ker(P(F)) ∩ Λ1n+q
Q−→ Λ1m −→ 0
and there existU0 ∈ R− Smith (Px(F)), Q0 ∈ L− Smith(
U0
),
with U0 = U0
(0n−m,m
Im
), Q0 =
(Im
0n−m,m
)Q0, andT ∈ Um[ d
dt]
such that:
0 −→ Λ1m
U−→ ker(P(F)) ∩ Λ1n+q
Q−→ Λ1m −→ 0
Im ↓ πn ↓ T ↓
0 −→ Λ1m
U0−→ ker(Px(F)) ∩ Λ1n
Q0−→ Λ1m −→ 0.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Thus, since the closed-loop system is flat, there existsM ∈ Um[ ddt]
such thatd(MQdX) = 0, and sinceQ = T−1Q0πn, we have
d(M′Q0dx) = 0
with M′ = MT−1 ∈ Um[ ddt].
Therefore, the idealΩ0 generated by the lines ofQ0dx is stronglyclosed if the coefficients of the matrixM′ depend only onx (not onξ).This results from the fact thatdM′ ∧ Q0dx = −M′d(Q0dx) (bycontradiction). Q.E.D.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Contents
1 Some Historical Considerations
2 On Flatness-based Design
3 On Necessary and Sufficient ConditionsThe Formalism of Manifolds of Jets of Infinite OrderPolynomial MatricesInterpretation in terms of Exact Sequences of ModulesFlatness Necessary and Sufficient ConditionsNecessary and Sufficient Conditions and Generalized MovingFrames
4 Exogeneous Feedback Linearization
5 Conclusions and Perspectives
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Conclusions and Perspectives
Numerous industrial applications:
asynchronous motors (Schneider-Electric)
mechatronics (Bosch)
automotive equipements (Valeo, Bosch, PSA,Siemens Automotive (IFAC Congress Applications Paper Prize2002 to Horn, Bamberger, Michau, Pindl))
underwater applications (IFP)
high-precision positionning (Micro-Controle)
magnetic bearings (Alcatel, Axomat GmbH)
chemical reactors (Total-Fina-Elf)
biotechnological processes (Ifremer)
. . .Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesI
R. Baron, J. Levine, and M. Mastail.Modelling and control of a fish extrusion process.In Proc. 1st IMACS/IFAC Conf. on Mathematical Modelling andSimulation in Agriculture and Bio-industries, Bruxelles, May1995.
B. Charlet, J. Levine, and R. Marino.On dynamic feedback linearization.Systems & Control Letters, 13:143–151, 1989.
B. Charlet, J. Levine, and R. Marino.Sufficient conditions for dynamic state feedback linearization.SIAM J. Control and Optimization, 29(1):38–57, 1991.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesII
I.K. Chatjigeorgiou, S.A. Mavrakos.An investigation of the non-linear transverse vibrations ofparametrically excited vertical marine risers and cables undertension.Proceedings of the 21st International Conference on OffshoreMechanics and Artic Engineering. Oslo, Norway, 2002.
A.A.R. Fehn, R. Rothfuß, and M. Zeitz.Flatness-based torque ripple free control of switched reluctanceservo machines.In R.M. Parkin, A. Al-Habaibeh, and M.R. Jackson, editors,ICOM 2003, International Conference on Mechatronics, pages209–214, 2003.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesIII
M. Fliess, J. Levine, Ph. Martin, P. Rouchon.On differentially flat nonlinear systems.Comptes Rendus des seances de l’Academie des Sciences I-315:619-624, 1992.
M. Fliess, J. Levine, Ph. Martin, P. Rouchon.Flatness and defect of nonlinear systems: Introductory theory andapplications.Internat. J. Control 61: 1327-1361, 1995.
M. Fliess, J. Levine, Ph. Martin, P. Rouchon.A Lie Backlund approach to equivalence and flatness of nonlinearsystems.IEEE Trans. Automat. Control 44 (5): 922-937, 1999.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesIV
M. Fliess, R. Marquez.Continuous-time linear predictive control and flatness: amodule-theoretic setting with examples.Internat. J. Control, 73: 606–623, 2001.
V. Hagenmeyer and E. Delaleau.Robustness analysis of exact feedforward linearization based ondifferential flatness.Automatica, 39:1941–1946, 2003.
J. Horn, J. Bamberger, P. Michau, and S. Pindl.Flatness-based clutch control for automated manualtransmissions.Control Engineering Practice, 11(12):1353–1359, 2003.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesV
F. Jadot, Ph. Martin, and P. Rouchon.Industrial sensorless control of induction motors.In A. Isidori, F. Lamnabhi-Lagarrigue, and W. Respondek,editors,Nonlinear Control in the Year 2000, volume 1: 535–544.Springer, 2000.
B. Kiss, J. Levine, and Ph. Mullhaupt.Modelling, flatness and simulation of a class of cranes.Periodica Polytechnica, Ser. El. Eng. 43(3):215–225, 1999.
B. Kiss, J. Levine, and Ph. Mullhaupt.Modeling and motion planning for a class of weight handlingequipment.J. Systems Science, 26, 4: 79–92, 2000.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesVI
B. Kiss, J. Levine, and Ph. Mullhaupt.A simple output feedback PD controller for nonlinear cranes.In Proc. of the 39th IEEE CDC 2000, Sydney, 2000.
B. Kiss, J. Levine, and Ph. Mullhaupt.Global stability without motion planning may be worse than localtracking.In Proc. ECC’01, Porto, 2001.
B. Kiss, J. Levine, and B. Lantos.On motion planning for robotic manipulation with permanentrolling contacts.Int. J. of Robotics Research, Vol. 21, 5-6, special issue“Non-holonomy on purpose”, 443–461, May 2002.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesVII
J. Levine, J. Lottin, J.C. Ponsart.A nonlinear approach to the control of magnetic bearings.IEEE Trans. on Control Systems Technology, 4, 5: 524–544,1996.
J. Levine.Are there new industrial perspectives in the control of mechanicalsystems?.in “Advances in Control (ECC99)”, P.M. Frank ed., 197–226,Springer, 1999.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesVIII
J. Levine, D.V. Nguyen.Flat output characterization for linear systems using polynomialmatrices.Systems& Control Letters 48: 69-75, 2003.
J. Levine.On the synchronization of a pair of independent windshieldwipers.IEEE Trans. on Control Systems Technology, Vol. 12, 5:787-795, 2004.
J. Levine.On necessary and sufficient conditions for differential flatness.Proc. of IFAC NOLCOS 2004 Conference, Stuttgart, 2004.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesIX
J. Levine, L. Praly, and E. Sedda.On the control of an electromagnetic actuator of valvepositionning on a camless engine.In Proc. AVEC 2004 Conference, Arnhem, 2004.
J. Levine and B. Remond.Flatness based control of an automatic clutch.In Proc. MTNS 2000, Perpignan, 2000.
J. von Lowis, J. Rudolph, J. Thiele, and F. Urban.Flatness-based trajectory tracking control of a rotating shaft.In 7th International Symposium on Magnetic Bearings, Zurich,pages 299–304, 2000.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesX
Ph. Martin.Contributiona l’ Etude des Systemes Differentiellement Plats.PhD thesis,Ecole des Mines de Paris, 1992.
Ph. Martin, R.M. Murray, P. Rouchon.Flat systems,Plenary Lectures and Minicourses, Proc. ECC 97, Brussels, G.Bastin and M. Gevers eds., 211–264, 1997.
N. Petit and P. Rouchon.Dynamics and solutions to some control problems for water-tanksystems.IEEE Trans. Automatic Control, 47(4):594–609, 2002.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesXI
N. Petit, P. Rouchon, J.-M. Boueilh, F. Guerin and P. Pinvidic.Control of an industrial polymerization reactor using flatness.J. of Process Control, 12: 659–665, 2002.
J.-B. Pomet.A differential geometric setting for dynamic equivalence anddynamic linearization.In B. Jakubczyk, W. Respondek, and T. Rzezuchowski, editors,Geometry in Nonlinear Control and Differential Inclusions, pages319–339. Banach Center Publications, Warsaw, 1993.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesXII
J.-B. Pomet.On dynamic feedback linearization of four-dimensional affinecontrol systems with two inputs.ESAIM-COCV, 1997.http://www.emath.fr/Maths/Cocv/Articles/articleEng.html.
M. Rathinam and R.M. Murray.Configuration flatness of Lagrangian systems underactuated byone control.SIAM J. Control and Optimization, 36(1):164–179, 1998.
R. Rothfuss, J. Rudolph, and M. Zeitz.Flatness based control of a nonlinear chemical reactor model.Automatica, 32:1433–1439, 1996.
Jean LEVINE Variations on a Flat Theme
IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesXIII
J. Rudolph.Flatness based control of distributed parameter systems.Shaker Verlag, Aachen, 2003.
J. Rudolph, J. Winkler, and F. Woittenek.Flatness based control of distributed parameter systems:examples and computer exercises from various technologicaldomains.Shaker Verlag, Aachen, 2003.
R. Sabri, J. Levine, F. Biolley, Y. Creff, C. Le Cunff and C. Putot.Connection of the riser to the well-head using active control.Proc. of the Deep Offshore Technology Conf., Marseille, Nov.2003.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
ReferencesXIV
H. Sira-Ramirez and S. Agrawal.Differentially Flat Systems.Marcel Dekker, New York, 2004.
H.L. Trentelman.On flat systems behaviors and observable image representations.Systems & Control Letters, 19:43–45, 1992.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
Flat output computation: linear motor with a singleauxiliary mass
Model (recall)
Mx = F − k(x− z)− r(x− z)mz = k(x− z) + r(x− z)
Settings = ddt:
(Ms2 + rs + k)x = (rs + k)z+ F(ms2 + rs + k)z = (rs + k)x
Definition polynomials:
x = Px(s)y, z = Pz(s)y, F = Q(s)y(ms2 + rs + k)Pz(s) = (rs + k)Px(s)
thusPx(s) = (ms2 + rs + k)P0, Pz(s) = (rs + k)P0.
Jean LEVINE Variations on a Flat Theme

IntroductionContents
On Flatness-based DesignOn Necessary and Sufficient Conditions
Exogeneous Feedback LinearizationConclusion
THANK YOU!
Jean LEVINE Variations on a Flat Theme



![Variations on an Original Theme [D.813] - Sheet music...Variations on an Original Theme D.813 26 Title Variations on an Original Theme [D.813] Author Schubert, Franz Peter - Publisher:](https://img.dokumen.tips/doc/110x75/60b91610c277013ea3256b00/variations-on-an-original-theme-d813-sheet-music-variations-on-an-original.jpg)

























