Embed Size (px)
Citation preview

DSP56009EVM
User’s Manual
Motorola, IncorporatedSemiconductor Products SectorDSP Division6501 William Cannon Drive WestAustin, TX 78735-8598

Introduction
This document supports the DSP56009 Evaluation Module (DSP56009EVM) including a description of its basic structure and operation, the equipment required to use it, the specifications of the key components, the provided software (such as the demonstration code and the software required to develop and debug sophisticated applications), schematic diagrams, and a parts list. Section 1 is a Quick Start Guide. Section 2 provides evaluation module specifications. Section 3 provides peripheral specifications. Section 4 provides schematics for the DSP56009EVM. Section 5 provides PLD equations and schematics and the parts list. Section 6 provides an example program and information on the debugger. Appendix A documents the audio pass-through demonstration program provided with the EVM. Appendix B describes the sound field processing demonstration. Appendix C includes additional notes for using the Assembler. This document has been designed for users experienced with DSP development tools. For users with little or no DSP experience, detailed information is provided in the additional documents supplied with this kit.

Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “typical” parameters which may be provided in Motorola data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights of others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support life, or for any other application in which the failure of the Motorola product could create a situation where personal injury or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that Motorola was negligent regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal Opportunity/Affirmative Action Employer.
How to reach us:
USA/Europe/Locations Not Listed
:Motorola Literature DistributionP.O. Box 20912Phoenix, Arizona 850361 (800) 441-2447 or1 (602) 303-5454
MFAX
:[email protected] (602) 244-6609
Asia/Pacific
:Motorola Semiconductors H.K. Ltd.8B Tai Ping Industrial Park51 Ting Kok RoadTai Po, N.T., Hong Kong852-2662928
Technical Resource Center:
1 (800) 521-6274
DSP Helpline
Japan
:Nippon Motorola Ltd.Tatsumi-SPD-JLDC6F Seibu-Butsuryu-Center3-14-2 Tatsumi Koto-KuTokyo 135, Japan03-3521-8315
Internet
:http://www.motorola-dsp.com
OnCE is a trademark of Motorola, Inc.

-4 DSP56302EVMUM/AD, Preliminary MOTOROLA

CONTENTS
SECTION 1 QUICK START GUIDE. . . . . . . . . . . . . . . . . . . . . . . 1-11.1 OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-31.2 EVALUATION MODULE DESCRIPTION AND FEATURES . 1-31.3 EQUIPMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-41.3.1 What you get with the Evaluation Module . . . . . . . . . . . . . 1-41.3.2 What you need to supply for AC-3/ProLogic Demonstration .
1-51.3.3 What you need to supply for software development . . . . . 1-61.4 INSTALLATION PROCEDURE . . . . . . . . . . . . . . . . . . . . . . . 1-61.4.1 Preparing the DSP56009EVM . . . . . . . . . . . . . . . . . . . . . . 1-71.4.2 Connecting the DSP56009EVM to the PC and Power . . . 1-81.4.3 Installing the Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
SECTION 2 EVM THEORY OF OPERATION . . . . . . . . . . . . . . . 2-12.1 INPUTS AND OUTPUTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-32.1.1 Clock Select. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-42.1.2 Serial Audio Interface (SAI) . . . . . . . . . . . . . . . . . . . . . . . . 2-42.1.3 Sony-Philips digital interface format (SPDIF) . . . . . . . . . . 2-52.1.4 Other inputs and Outputs. . . . . . . . . . . . . . . . . . . . . . . . . . 2-52.1.5 Operating Mode Selection . . . . . . . . . . . . . . . . . . . . . . . . . 2-62.1.6 OnCE™ Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-62.1.7 RS232 Connections and JP1. . . . . . . . . . . . . . . . . . . . . . . 2-72.1.8 Operating Modes and SRAM refresh in the 56009 . . . . . . 2-72.1.9 Evaluation Module Parts . . . . . . . . . . . . . . . . . . . . . . . . . . 2-72.1.10 Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-82.1.11 Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
SECTION 3 PERIPHERAL SPECIFICATIONS . . . . . . . . . . . . . . 3-13.1 CS5390 STEREO ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33.2 CS4331 STEREO DAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-43.3 CS3310 STEREO DIGITAL VOLUME CONTROL. . . . . . . . . 3-43.4 CS8412 DIGITAL AUDIO INTERFACE RECEIVER . . . . . . . 3-5
MOTOROLA DSP56009EVMUM iii

3.5 CS8402A DIGITAL AUDIO INTERFACE TRANSMITTER . . 3-63.6 STK10C68 CMOS 2K X 8 NVSRAM . . . . . . . . . . . . . . . . . . . 3-73.7 SC937-02 AES/EBU TRANSFORMER . . . . . . . . . . . . . . . . . 3-73.8 LCD PANEL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-83.9 WIRING FOR KEYPAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
SECTION 4 DSP56009EVM SCHEMATICS. . . . . . . . . . . . . . . . 4-1
SECTION 5 DSP56009EVM PLD SPECIFICATION AND EVM PARTS LIST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5.1 EPM7032 PLD SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . 5-35.1.1 PLD Schematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-35.1.2 PLD Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-55.2 EVALUATION MODULE PARTS LIST . . . . . . . . . . . . . . . . . 5-8
SECTION 6 EXAMPLE TEST PROGRAM . . . . . . . . . . . . . . . . . 6-16.1 OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-36.2 WRITING THE PROGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . 6-46.2.1 Source Statement Format . . . . . . . . . . . . . . . . . . . . . . . . . 6-46.2.2 Example Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-56.3 ASSEMBLING THE PROGRAM . . . . . . . . . . . . . . . . . . . . . . 6-76.3.1 Assembler Command Format . . . . . . . . . . . . . . . . . . . . . . 6-76.3.2 Assembler Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-86.3.3 Assembler Directives . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-116.3.4 Assembling the Example Program . . . . . . . . . . . . . . . . . 6-166.4 MOTOROLA DSP LINKER . . . . . . . . . . . . . . . . . . . . . . . . . 6-166.4.1 Linker Options. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-176.4.2 Linker Directives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-236.5 INTRODUCTION TO THE DEBUGGER SOFTWARE . . . . 6-246.6 RUNNING THE PROGRAM . . . . . . . . . . . . . . . . . . . . . . . . 6-26
iv DSP56009EVMUM MOTOROLA

APPENDIX A AUDIO PASS-THROUGH EXAMPLE . . . . . . . . . . .A-1
APPENDIX B SOUND FIELD PROCESSING EXAMPLE . . . . . . .B-1
APPENDIX C DSP56009EVM MULTIPLEX DEFINTITION . . . . . .C-1
MOTOROLA DSP56009EVMUM v

LIST OF FIGURES
Figure 1-1 Evaluation Module Component Layout . . . . . . . . . . . . . . . . . . . . 1-5
Figure 1-2 AC-3 Home Theater Demonstration. . . . . . . . . . . . . . . . . . . . . . . 1-6
Figure 1-3 Connecting the DSP56009EVM Cables. . . . . . . . . . . . . . . . . . . . 1-8
Figure 3-1 CS5390 ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Figure 3-2 CS4331 DAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Figure 3-3 CS3310 Stereo Digital Volume Control . . . . . . . . . . . . . . . . . . . . 3-5
Figure 3-4 Serial Port Timing for the CS3310 . . . . . . . . . . . . . . . . . . . . . . . . 3-5
Figure 3-5 CS8412 Digital Audio Interface Receiver . . . . . . . . . . . . . . . . . . . 3-6
Figure 3-6 CS8402 Digital Audio Interface Transmitter . . . . . . . . . . . . . . . . . 3-6
Figure 3-7 STK10C68 8K x 8 nvSRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
Figure 3-8 SC937-02 AES/EBU Transformer . . . . . . . . . . . . . . . . . . . . . . . . 3-8
Figure 3-9 LCD Softswitch Screens. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
Figure 3-10 Keypad Wiring Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
Figure 4-1 DSP56009 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
Figure 4-2 Microcontroller and LCD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
Figure 4-3 Programmable Logic Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
Figure 4-4 SRAM and External Memory Interface. . . . . . . . . . . . . . . . . . . . . 4-6
Figure 4-5 RS-232 and OnCE Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
Figure 4-6 Analog-to-Digital Converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
vi DSP56009EVMUM MOTOROLA

Figure 4-7 Digital-to-Analog Converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
Figure 4-8 SPDIF I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10
Figure 4-9 Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
Figure 5-1 PLD Schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-4
Figure 6-1 Development Process Flow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
Figure 6-2 Example Debugger Window Display . . . . . . . . . . . . . . . . . . . . . 6-25
Figure A-1 Output Interrupt Structure for Analog Input . . . . . . . . . . . . . . . . . A-4
Figure A-2 Output Interrupt Structure for Digital Input. . . . . . . . . . . . . . . . . . A-4
Figure A-3 DSP56009EVM Pass-through Setup. . . . . . . . . . . . . . . . . . . . . . A-6
Figure B-1 Early Reflection DO loop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-6
Figure B-2 Early Reflection FIR Block (one channel) . . . . . . . . . . . . . . . . . . B-6
Figure B-3 Comb Filter (one of six) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-8
Figure B-4 All-pass Filter. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-9
Figure B-5 All-Pass Filter Routine. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-9
Figure B-6 De-Correlation Routine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-11
Figure B-7 EVM configuration for Sound Field Processing Demo . . . . . . . B-12
Figure B-8 Sound Field Processor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-14
Figure B-9 Sound Field Processor Time Analysis. . . . . . . . . . . . . . . . . . . . B-18
Figure C-1 DSP56009EVM Jumper Setting for Multiplexing. . . . . . . . . . . . . C-5
MOTOROLA DSP56009EVMUM vii

LIST OF TABLES
Table 2-1 JP4 Jumpers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Table 2-2 JP5 Jumpers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Table 2-3 JP3 Jumpers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
Table 5-1 DSP56009EVM Parts List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-8
Table A-1 Output sources for audio pass-through . . . . . . . . . . . . . . . . . . . . A-5
Table B-1 Early Reflection FIR Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . B-4
Table B-2 Comb filter loop-back gains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-7
Table B-3 De-Correlation All-pass filter gains . . . . . . . . . . . . . . . . . . . . . . B-11
Table B-4 Sound Field Processing Audio Outputs. . . . . . . . . . . . . . . . . . . B-13
Table B-5 X and Y Memory Map for Sound Field Processing Demo. . . . . B-15
Table C-1 DSP56009EVM MUX Cable Pinout. . . . . . . . . . . . . . . . . . . . . . . C-3
MOTOROLA DSP56009EVMUM vii

viii DSP56009EVMUM MOTOROLA

SECTION 1
QUICK START GUIDE
MOTOROLA DSP56009EVMUM 1-1

Quick Start Guide
1.1 OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-31.2 EVALUATION MODULE DESCRIPTION AND FEATURES . . . . . 1-31.3 EQUIPMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-41.3.1 What you get with the Evaluation Module . . . . . . . . . . . . . . . . 1-41.3.2 What you need to supply for AC-3/ProLogic Demonstration . . 1-51.3.3 What you need to supply for software development. . . . . . . . . 1-61.4 INSTALLATION PROCEDURE. . . . . . . . . . . . . . . . . . . . . . . . . . . 1-61.4.1 Preparing the DSP56009EVM . . . . . . . . . . . . . . . . . . . . . . . . . 1-71.4.2 Connecting the DSP56009EVM to the PC and Power . . . . . . . 1-81.4.3 Installing the Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
1-2 DSP56009EVMUM MOTOROLA

Quick Start Guide
Overview
1.1 OVERVIEW
This document describes the basic structure, theory, and operation of the DSP56009EVM (Evaluation Module), the equipment required to use the Evaluation Module, and the specifications of the key components on the Evaluation Module. Code samples and self-test code are provided on the accompanying software diskette. Evaluation Module schematic diagrams and a parts list are included as well.
1.2 EVALUATION MODULE DESCRIPTION AND FEATURES
The DSP56009EVM is a low-cost platform for multichannel digital audio applications design, prototyping, and development. The fully assembled and tested circuit board contains:
• 24-bit DSP56009 Digital Signal Processor operating at 81 MHz for Dolby AC-3 and Dolby ProLogic
• 8192 bytes of off-chip SRAM and 8192 bytes of nonvolatile RAM
• Standard 30-pin SIMM slot for easy, inexpensive DRAM expansion
• One 20-bit stereo Analog-to-Digital converter (ADC), three 18-bit stereo Digital-to-Analog converters (DACs)
• Programmable analog-domain attenuators on the Digital-to-Analog outputs
• RCA jacks for all analog audio Input/Output
• Optical and transformer-isolated electrical SPDIF/CP340 stereo digital audio inputs and outputs
• 50-pin expansion connector to provide the capability for expansion and/or substitution of other input/output peripherals, as well as easy interprocessor communication between Motorola Evaluation Modules
• Socketed MC68HC711E9 (52-pin CLCC microcontroller) to allow the user to substitute user-programmed microprocessor and prototype custom 68HC711 code (allows connection to MC68HC711 emulation systems)
• 2 × 16 character Liquid Crystal Display (LCD) and four softswitches for user interface
• Connector provides capability to use optional standard 4 × 4 keypad matrix
• MC68705K1 microcontroller performing RS-232-to-OnCETM port command conversions
MOTOROLA DSP56009EVMUM 1-3

Quick Start Guide
Equipment
1.3 EQUIPMENT
The following section gives a brief summary of the equipment required to use the Evaluation Module, some of which is supplied with the Evaluation Module, and some of which will have to be supplied by the user.
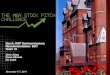
1.3.1 What you get with the Evaluation Module
• Evaluation Module board (See Figure 1-1)
• 3.5" disk titled ’Debug - Evaluation Module’
• 3.5" disk titled ’DSP56009EVM Demos’
– PCM Passthrough Files
– Soundfield Processor Files
– Example Assembly Language Files (example.asm)
• Debug - Evaluation Module manual
• DSP56000 Family Manual
• DSP56009 User’s Manual
• DSP56009 Technical Data sheet
• DSP56009 Product Brief
• DSP56009 EVM User’s Manual (this document), including Evaluation Module Schematics and Demonstration software documentation
• Additional relevant documentation may be included in the form of a READ.ME file on the Evaluation Module Software disk.
1-4 DSP56009EVMUM MOTOROLA

Quick Start Guide
Equipment
Figure 1-1 Evaluation Module Component Layout
1.3.2 What you need to supply for AC-3/ProLogic Demonstration
• An AC-3 or PCM bitstream source (i.e. Laserdisc, DAT, CD source, VHS, etc...)
• An audio amplifier driving headphones or speakers as shown on the following page in Figure 1-2.
• Power supplies: dual 8-12V DC (for analog circuits), 8-15V AC or DC (for digital circuits)
68HC711E9
LCD Display
SC937-02
RS-232
OnCETM
Reset
CS5390
PLD
DSP 56009
68HC705K1
CS4331CS3310 CS3310 CS4331 CS3310 CS4331
STK10C68
CS8412
CS8402A
AnalogPower
30-PinSIMMSocket
JP7
JP4
JP2
JP5
JP3
J9
J18
JP1
JP6
J2
J3
DigitalPower
SPDIFIn
SPDIFOut
Right In Left In
Analog Outputs
Right 3 Right 2Left 2 Left 1 Right 1Left 3
Analog Inputs
J5
JP9
InfraredRemoteReceiver
In
OpticalOut
Optical
J1
LS RS C Sub L R
J4
MOTOROLA DSP56009EVMUM 1-5

Quick Start Guide
Installation Procedure
1.3.3 What you need to supply for software development
• A PC (-386 or higher) with minimum 2 Mbytes of memory, a 3.5” floppy disk drive, and a serial port capable of at least 19,200 bits-per-second data transfer rate.
• An RS-232 cable (DB9 male to DB9 female)
Figure 1-2 AC-3 Home Theater Demonstration
1.4 INSTALLATION PROCEDURE
Installation requires four basic steps:
1. Preparing the DSP56009EVM board
2. Connecting the board to the PC and power
3. Installing the software
Power Amp
Laserdisc Player
RF Demodulator
Listener
DSP56009EVM
Subwoofer(unpowered)
Subwoofer (powered)
1-6 DSP56009EVMUM MOTOROLA

Quick Start Guide
Installation Procedure
4. Testing the installation
1.4.1 Preparing the DSP56009EVM
CAUTION
Because all electronic components aresensitive to the effects of electrostaticdischarge (ESD) damage, correctprocedures should be used whenhandling all components in this kit andinside the supporting personal computer.Use the following procedures to minimizethe likelihood of damage due to ESD:
– Always handle all static-sensitive components only in a protected area, preferably a lab with conductive (anti-static) flooring and bench surfaces.
– Always use grounded wrist straps when handling sensitive components.
– Never remove components from anti-static packaging until required for installation.
– Always transport sensitive components in anti-static packaging.
MOTOROLA DSP56009EVMUM 1-7

Quick Start Guide
Installation Procedure
1.4.2 Connecting the DSP56009EVM to the PC and Power
Figure 1-3 shows the interconnection diagram for connecting the PC and the external power supply to the DSP56009EVM board. Use the following steps to complete cable connections:
1. Connect the DB9P end of the RS-232 interface cable to the RS-232 port connection on the PC.
2. Connect the DB9S end of the cable to J4, shown in Figure 1-1 on page 1-5, on the DSP56009EVM board. This provides the connection to allow the PC to control the board function.
3. Make sure that the external power supplies do not have power supplied to them.
4. Connect the output power connectors into J2 and J3, shown in Figure 1-1 on page 1-5, on the DSP56009EVM board.
5. Apply power to the power supply. The green Power LED will light when power is correctly applied.
Figure 1-3 Connecting the DSP56009EVM Cables
PC-compatible
Cable
Computer
DB9 Interface
DSP56009EVM
External+5V
Power
J4
J2Connect cableto RS-232 port
J3
External±8-12VPower
1-8 DSP56009EVMUM MOTOROLA

Quick Start Guide
Installation Procedure
1.4.3 Installing the Software
The DSP56009EVM demo software includes the following:
• Motorola diskette containing:
– Demonstration code (passthru, sfpevm09, example)
• Domain Technologies diskette containing the windowed user interface debug software
Use the following steps to install the software:
1. Insert the Motorola software diskette into the PC diskette drive.
2. If the system is not already running in Windows, start Windows.
3. From Windows, select a DOS window and run the install program. The general format for the command line of the install program is install <source>. For example, if your diskette drive is the a: drive, type in a:install a:. The program installs the software in the default destination c:\evm56007.
4. Close the DOS window and remove the Motorola software diskette from the diskette drive. Insert the Domain Technologies diskette labeled Debug-56K into the drive.
5. From Windows, run the Debugger installation program install.exe on the diskette. This can be done from the Microsoft Windows Program Manager by pulling down the File menu, choosing Run, entering a:install on the command line, and clicking OK.
6. Read the README.TXT if you are installing the Debugger program for the first time. This provides information in addition to that provided by the Domain Technologies manual included with this kit.
7. The install program creates a program group called EVM56007 and a program icon called EVM56007 within Windows. This step completes the software installation.
MOTOROLA DSP56009EVMUM 1-9

Quick Start Guide
Installation Procedure
1-10 DSP56009EVMUM MOTOROLA

SECTION 2
EVALUATION MODULE THEORY OF OPERATION
MOTOROLA DSP56009EVMUM 2-1

Evaluation Module Theory of Operation
2.1 INPUTS AND OUTPUTS. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-32.1.1 Clock Select . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-42.1.2 Serial Audio Interface (SAI). . . . . . . . . . . . . . . . . . . . . . . . 2-42.1.3 Sony-Philips digital interface format (SPDIF) . . . . . . . . . . 2-52.1.4 Other inputs and Outputs . . . . . . . . . . . . . . . . . . . . . . . . . 2-52.1.5 Operating Mode Selection. . . . . . . . . . . . . . . . . . . . . . . . . 2-62.1.6 OnCE™ Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-62.1.7 RS232 Connections and JP1 . . . . . . . . . . . . . . . . . . . . . . 2-72.1.8 Operating Modes and SRAM refresh in the 56009 . . . . . . 2-72.1.9 Evaluation Module Parts . . . . . . . . . . . . . . . . . . . . . . . . . . 2-72.1.10 Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-82.1.11 Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2-2 DSP56009EVMUM MOTOROLA

Evaluation Module Theory of Operation
Inputs and Outputs
Refer to Section 4, 56009EVM Schematics, for reference to pinouts and jumper configurations.
2.1 INPUTS AND OUTPUTS
Analog signals connected to the Evaluation Module inputs are converted to 20 bit data at the ADC. U19 and U20 attenuate the signal and convert it to Balanced mode.
The ADC has the Select Serial I/O Mode (SMODE) pin pulled high to make the ADC the SAI receive clock master. When the ADC is in Master mode, the ADC’s Serial Data Clock (SCLK) and Left/Right Select (L/R) word clock pins are outputs. The L/R word clock output is the opposite polarity of I2S. It is inverted in the Programmable Logic Device (PLD) to create true I2S. The ADC receives its oversampling clock on the Digital Section Clock Input (ICLKD), which is then internally divided by two, and this signal is provided to the Analog Section Clock Input (ICLKA). ICLKD can be driven from the 11.2896 MHz clock, the 12.288 MHz clock, or the 256 × Fs clock produced by the CS8412 AES/EBU Receiver. The Audio Power Down input (APD) and Digital Power Down input (DPD) pins are wired to the Cntl_Mute signal of the PLD. When pulled high, the ADC will be muted. When first pulled low, the ADC will be reset, then it will be enabled.
The other possible input source comes from the SPDIF inputs (J14 for electrical input and J17 for optical input). Jumper JP4 selects the source (see Table 2-1 below). When receiving valid SPDIF input, the SPDIF Receiver drives the Master Clock (MCK) output that is 256 times the Frame Sync frequency of the received data. The CS8412 operates in Mode 3, the I2S Slave mode.
Table 2-1 JP4 Jumpers
Selection Jumper Settings
Electric SPDIF
JP4.1 to JP4.3JP4.2 to JP4.4
MOTOROLA DSP56009EVMUM 2-3

Evaluation Module Theory of Operation
Inputs and Outputs
2.1.1 Clock Select
The Evaluation Module provides a means for the user to select which clock controls the reception and transmission of digital audio (see Table 2-2 below). JP2 selects the ADC and DAC clocks which, when jumpered, are set at 44.1 KHz and, when not jumpered, at 48 KHz. The expansion connector, J5, can be used to directly access the DSP. The receive SAI bus may be clocked by the selection made at JP2 (44.1 KHz or 48 KHz) or be clocked by the received SPDIF signal. The transmit SAI bus may be clocked by either the clock selected at JP2 or by the received SPDIF signal. It is the user’s responsibility to ensure that data is output at the desired rate. See Table 2-2, below.
Table 2-2 JP5 Jumpers
2.1.2 Serial Audio Interface (SAI)
The DSP56009 SAI transmitter drives the six analog outputs and the SPDIF output. I2S is the Default mode for the DACs. The Master Clock (MCLK) rate for the DACs is 256 × Fs. The dual RC networks after the DACs serve as AC couplers for audio data,
Optical SPDIF
JP4.3 to JP4.5JP4.4 to JP4.6
Receive/Transm
it
Jumper JP5.1 to JP5.2
Jumper JP5.3 to JP5.4
No Jumper
Rx Clocked by crys-tal
– Clocked by received SPDIF
Tx – Clocked by crys-tal
Clocked by received SPDIF
Table 2-1 JP4 Jumpers
Selection Jumper Settings
2-4 DSP56009EVMUM MOTOROLA

Evaluation Module Theory of Operation
Inputs and Outputs
and as low-pass filters to convert the delta-sigma digital output pulses to analog waveforms.
The digitally controlled analog domain attenuators receive the audio data and attenuate or amplify the data as determined by the microcontroller. The attenuators receive the Serial Clock input (SCLK), Serial Data Input (SDATAI), and the Chip Select/latch (CS) from the microcontroller.
2.1.3 Sony-Philips digital interface format (SPDIF)
The SPDIF transmitter receives data from the DSP through the Serial Data input (SDATA) using the Frame Sync (FSYNC) and the Serial Data Clock (SCK). The transmitter outputs SPDIF audio signals through J15 (electrical) and J16 (optical). Fs_sens from the clock select appears at the expansion connector in order to read the sampling rate with the DSP’s General Purpose I/O (GPIO1) at J5.41 and also at U21-2 to select the state of the ‘sample-rate’ bits transmitted within the channel status block. See the SPDIF specification for more information. The channel status bits and block sync signals (DRcv_Blk, DTrn_Blk, DRcv_CS, and DTrn_CS) are available at J5.43 to allow the DSP to read one of them, as well. Isolation transformers are used on both input and output, although they are not strictly required for SPDIF because this Evaluation Module is intended to be used as a development system.
2.1.4 Other inputs and Outputs
The clock master is derived from one of two sources: the 11.2896 MHz clock or the 12.288 MHz clock. The microcontroller also receives commands from either the soft switches (S1, S2, S3, or S4) or from the Keypad Expansion Port, J18. The current user screen or the results of these commands are then displayed by a modular LCD panel with a 2 × 16 character display. The microcontroller code is capable of driving larger LCD displays, but all user screens are designed for a 2 × 16 character display.
The MC68HC711E9 communicates with the DSP via the Serial Host Interface (SHI) port in SPI mode. When SS is pulled low, the microcontroller can write to the DSP. The MOSI and MISO lines pass control data through the DSP SHI in 24-bit mode. SCK is the SPI Shift Clock from the DSP. Again, the expansion connector, J5, can be used to access or intercept host port communications.
MOTOROLA DSP56009EVMUM 2-5

Evaluation Module Theory of Operation
Inputs and Outputs
The Control_Data, Control_Clock, and Control_Latch lines from the microcontroller control the digitally controlled analog domain attenuators. The Control_Mute line mutes the ADC and the DACs; low is muted, high is enabled.
2.1.5 Operating Mode Selection
DSP56009EVM modes can be selected at JP3, as shown in Table 2-3. Once the mode has been selected, the PLD can receive interrupts from the network attached to J19.
X = jumper installed; - = no jumper
2.1.6 OnCE™ Port
The OnCETM port interface operates by receiving the serial data from the RS-232 Transceiver and executing commands sent by the host computer. These commands can reset the DSP, put the DSP in Debug mode, release the DSP from Debug mode, read and write to the OnCETM port, and read and write to the DSP itself. The serial bit rate is 19,200 bits/second. The RS-232 serial communications are performed in software on the MC68705K1. Port A of the MC68705K1 communicates with the DSP, and Port B communicates with the host computer. The acknowledge signal from the OnCETM port is a low-going pulse on DS0. Since the 68705K1 is too slow to reliably
Table 2-3 JP3 Jumpers
ModeJP3.5 to JP3.6
JP3.3 to JP3.4
JP3.1 to JP3.2
0 X X X
1 X X -
2 X - X
3 X - -
4 - X X
5 - X -
6 - - X
7 - - -
2-6 DSP56009EVMUM MOTOROLA

Evaluation Module Theory of Operation
Inputs and Outputs
catch this very narrow pulse, the pulse is latched in the PLD and the output of the latch appears on the ACK pin (PA2). When this occurs, the 68705K1 illuminates red LED D5 to indicate that the DSP is in the Debug mode. For more information on the OnCE port, see the DSP56000 Family Manual. The reset switch will reset the microcontroller, which will subsequently reset the DSP56009. The MC68705K1 source and object code are available from the Motorola DSP Division; contact your local Motorola FAE.
2.1.7 RS232 Connections and JP1
RS-232 is an often-abused standard, and the direction of the signals present on pins 2 and 3 of the DB9 connector do not always conform to the standard. JP1 provides the user with the ability to reverse these two pin connections without resorting to NULL Modem adapters or rewiring cable connectors. As shipped, JP1.1 is connected via shorting jumpers to JP1.3 and JP1.2 is connected to JP1.4. This connects J4.2 to the OUTPUT of the Evaluation Module’s RS-232 level converter (U4) and J4.3 to the INPUT of the board’s RS-232 receiver. These directions can be reversed by reorienting the shorting jumpers and turning them 90 degrees (one-quarter turn), thereby connecting JP1.1 to JP1.2 and JP1.3 to JP1.4. The user should never need to rewire an RS-232 connector in order to establish Evaluation Module communications with a host computer.
2.1.8 Operating Modes and SRAM refresh in the 56009
In Modes 0, 1, 2, and 3 the SRAM is refreshed from the nvRAM and the DSP can bootstrap from the SRAM via the EMI if a valid Bootstrap mode is used. When in Modes 4, 5, 6, and 7 the SRAM is not refreshed. Refreshes are not affected by jumpers on the expansion connector, J5. Jumpers J5.37 and J5.39 must be inserted to have full DSP control of the SRAM and nvRAM after bootstrap.
2.1.9 Evaluation Module Parts
The parts list of the DSP56009EVM is shown in Section 5.
MOTOROLA DSP56009EVMUM 2-7

Evaluation Module Theory of Operation
Inputs and Outputs
2.1.10 Power Supplies
The Evaluation Module requires power sources, for both analog and digital circuits, in order to operate. Bipolar analog power (use a linear power supply for best results) is received through screw terminals at J3. Digital power is received through screw terminals at J2 or via a 2.1mm connector (J1). When the power is on, D6 (green LED) is illuminated. Analog power input may be 8 to 12 volts and digital power input may be 8 to 15 volts. While the voltage regulator can accommodate higher input voltage potentials, the added heat dissipation required at these input voltage levels will result in the regulator becoming dangerously warm, and it is not recommended that the user subject the board to power inputs in excess of the maximum levels listed.
Note: Always supply the Evaluation Module with analog power prior to or simultaneous with the application of digital power. If digital power is supplied before the analog power, the DACs may go into one of three possible error modes (no long-term damage to the device will occur), and will not function correctly. If analog power is supplied first, or if both analog power and digital power are applied simultaneously, these problems do not appear and the DACs are properly initialized.
2.1.11 Memory
The Evaluation Module has 8192 bytes each of fast Static RAM (SRAM) and of nonvolatile RAM (nvRAM). The SRAM operates at zero wait states at a 40 MHz DSP clock speed, one wait state at 50, 66 MHz and two wait states at 81 MHz. The contents of the SRAM may be block-loaded into nvRAM and the contents of the nvRAM may be block- loaded into the SRAM. The lowest 3072 bytes of the nvRAM may also be used to store code to load into the DSP via EMI bootstrap.
2-8 DSP56009EVMUM MOTOROLA

SECTION 3
PERIPHERAL SPECIFICATIONS
MOTOROLA DSP56009EVMUM 3-1

Peripheral Specifications
3.1 CS5390 STEREO ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33.2 CS4331 STEREO DAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-43.3 CS3310 STEREO DIGITAL VOLUME CONTROL . . . . . . . . 3-43.4 CS8412 DIGITAL AUDIO INTERFACE RECEIVER . . . . . . . 3-53.5 CS8402A DIGITAL AUDIO INTERFACE TRANSMITTER . . 3-63.6 STK10C68 CMOS 2K X 8 NVSRAM . . . . . . . . . . . . . . . . . . . 3-73.7 SC937-02 AES/EBU TRANSFORMER . . . . . . . . . . . . . . . . . 3-73.8 LCD PANEL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-83.9 WIRING FOR KEYPAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
3-2 DSP56009EVMUM MOTOROLA

Peripheral Specifications
CS5390 Stereo ADC
The following section describes the various peripheral devices used on the DSP56009EVM and includes any necessary equations and information. Contact information for the manufacturers of significant peripheral devices is included along with the parts listing in Section 5.
3.1 CS5390 STEREO ADC
The CS5390 is a complete Analog-to-Digital Converter (ADC) for stereo digital audio systems. It performs sampling, analog-to-digital conversion and anti-alias filtering, generating 20-bit values for both left and right inputs in serial form. The output word rate can be up to 50 kHz per channel.
The CS5390 uses fifth-order, delta-sigma modulation with 64 times oversampling followed by digital filtering and decimation, which removes the need for an external anti-alias filter, beyond the simple balanced RC filter formed by R25, R26, and C8 (R31, R32, and C20 for the right channel).
The ADC uses a differential architecture that provides excellent noise rejection. The CS5390 has a filter passband of DC to 21.7 kHz. The filters are linear phase, have 0.005 dB passband ripple, and greater than 100 dB stopband rejection. The operating temperature range is 0o to 70o.
Figure 3-1 CS5390 ADC
Voltage Reference
LP Filter
LP Filter
DACComparator
DACComparator
S/H
MicrocontrollerCalibration Calibration
SRAM
Digital DecimationFilter
Digital DecimationFilter
Serial Output Interface
S/H
VA+ VA- VL+ LGND DCAL DPD VD+ DGND
SDATACMODESMODE
VREF+VREF-
AINL-AINL+
AGND
AINR-AINR+
ICLKA APD ACAL OCLKD ICLKD FSYNC SCLK L/R
+ -
+
-+-
-+
2827
43
1
5 20 19 16 14 13
1112
23 24 7 6 9 10 17 18
22 2 15
26
25
MOTOROLA DSP56009EVMUM 3-3

Peripheral Specifications
CS4331 Stereo DAC
3.2 CS4331 STEREO DAC
The CS4331 is a complete stereo Digital-to-Analog Converter (DAC) with 18-bit resolution, including interpolation, 1-bit digital-to-analog conversion, and output analog filtering in an 8-pin package. The CS4331 is based on delta-sigma modulation where the modulator output controls the reference voltage input to an ultra-linear analog low-pass filter. This architecture allows for infinite adjustment of sample rate between 1 kHz and 50 kHz while maintaining linear phase response, simply by changing the master clock frequency. The CS4331 contains optional on-chip de-emphasis and operates from a single +5 V power supply.
The CS4331 has a 96 dB dynamic range, less than 0.003% THD, low clock jitter sensitivity and completely filtered line level outputs that use linear-phase filtering.
.
Figure 3-2 CS4331 DAC
3.3 CS3310 STEREO DIGITAL VOLUME CONTROL
The CS3310 is a complete stereo digital volume control designed specifically for audio systems. It features a 16-bit serial interface that controls two independent, low distortion (0.001% THD + N) audio channels.
The CS3310 includes an array of well-matched resistors and a low-noise active output stage that is capable of driving a 600 Ω load. A total adjustable range of 127 dB, in 0.5 dB steps, is achieved through 95.5 dB of attenuation and 31.5 dB of gain.
3
1
2
4
8
5
Serial InputInterface
Interpolator
Interpolator
Delta-SigmaModulator
Delta-SigmaModulator
DAC
DAC
AnalogLow-Pass
Filter
AnalogLow-Pass
Filter
De-emphasis Voltage ReferenceLRCK
SDATAI
DEM/SCLK/CONFIG AGND VA+
AOUTL
AOUTR
MCLK
6 7
3-4 DSP56009EVMUM MOTOROLA

Peripheral Specifications
CS8412 Digital Audio Interface Receiver
The simple 3-wire interface provides daisy-chaining of multiple CS3310s for multi-channel audio systems. The device operates from ±5V supplies and has an input/output voltage range of ±3.75 V.
Figure 3-3 CS3310 Stereo Digital Volume Control
L0 = Left Channel Least Significant Bit R0 = Right Channel Least Significant Bit L7 = Left Channel Most Significant Bit R7 = Right Channel Most Significant Bit
SDATA is latched internally on the rising edge of SCLK
SDATAO transitions after the falling edge of SCLK SDATAO bits reflect the data previously loaded into the CS3310
Figure 3-4 Serial Port Timing for the CS3310
3.4 CS8412 DIGITAL AUDIO INTERFACE RECEIVER
The CS8412 is a monolithic CMOS device that receives and decodes audio data according to the AES 3 - 1992, EBU Tech. 3250-E, IEC 958, SPDIF, and EIAJ CP-340 interface standards. The CS8412 receives data from a transmission line, recovers the
+-
+-
UX
M
UX
M
Control
RegisterSerial to
ParallelRegister
AINL
AGNDLAGNDR
AINR
AOUTL
ZCEN
SDATAO
SDATAI
SCLK
AOUTR
16
15
10
9
12 13 4 5
14
2
1
3
7
6
8 MUTE
8
8
8
8
16
VA+ VA- VD+ DGND
CS
SDATAI
SDATAO
R7 R6 R5 R4 R3 R2 R1 R0 L7 L6 L5 L4 L3 L2 L1 L0
R7 R6 R5 R4 R3 R2 R1 R0 L7 L6 L5 L4 L3 L2 L1 L0
CS
SCLK
MOTOROLA DSP56009EVMUM 3-5

Peripheral Specifications
CS8402A Digital Audio Interface Transmitter
clock and synchronization signals, and de-multiplexes the audio and non-audio data. Either differential or single-ended inputs can be decoded. The CS8412 de-multiplexes the channel, user, and validity data directly to dedicated output pins for the most commonly needed channel status bits.
Figure 3-5 CS8412 Digital Audio Interface Receiver
3.5 CS8402A DIGITAL AUDIO INTERFACE TRANSMITTER
The CS8402A is a monolithic CMOS device that encodes and transmits audio data according to the AES 3 - 1992, EBU Tech. 3250-E, IEC 958, SPDIF, and EIAJ CP-340 interface standards. The CS8402A accepts audio and non-audio data and multiplexes and encodes the data. The audio serial port is double-buffered and capable of supporting a wide variety of formats. The CS8402A multiplexes the channel, user, and validity data directly from dedicated input pins for the most commonly needed channel status bits.
Figure 3-6 CS8402 Digital Audio Interface Transmitter
RS-422Receiver
Clock & DataRecovery
De-Mux
AudioSerial Port
RegistersMux Mux
CS12/FCK SEL CO/ Ca/ Cb/ Cc/ Cd/ Ca/ ERF CBL E0 E1 E2 F0 F1 F2
RXPRXN
VD+ DGND VA+ FILT AGND MCK M3 M2 M1 M0
SDATASCLKFSYNCCUVERF
910
13 16 6 5 4 3 2 1 25 15
7 8 22 20 21 19 17 18 24 2326121111428
AudioSerial Port
Registers
MUX RS422 Driver
678
1011 9
23 22 21 5 16
15 24
20
17
SCKFSYNC SDATA
CUV
Dedicated Channel CBL TRNPTStatus Bits
M2 M1 M0 MCK RST
TXP
TXN
7
3-6 DSP56009EVMUM MOTOROLA

Peripheral Specifications
STK10C68 CMOS 2k x 8 nvSRAM
3.6 STK10C68 CMOS 2K X 8 NVSRAM
The Simtek STK10C68 is a Fast Static RAM (25, 30, 35, and 45ns), with a nonvolatile electrically-erasable PROM (EEPROM) element incorporated in each static memory cell. The SRAM can be read and written an unlimited number of times while independent, nonvolatile data resides in EEPROM. Data may easily be transferred from the SRAM to the EEPROM (STORE cycle), or from the EEPROM to the SRAM (RECALL cycle) using the NE pin (Nonvolatile Enable). It combines the high performance and ease of use of a fast SRAM with nonvolatile data integrity.
The STK10C68 features 12, 15, 20, and 25 ns output enable access times, hardware STORE and RECALL initiation, automatic STORE and RECALL timing, 104 or 105 STORE cycles to EEPROM, unlimited RECALL cycles from EEPROM, and 10-year data retention in EEPROM. The STK10C68 requires a single +5 V power supply.
Figure 3-7 STK10C68 8 K × 8 nvSRAM
3.7 SC937-02 AES/EBU TRANSFORMER
The AES/EBU circuit incorporates a transformer to reject common mode interference while transmitting the signal with fast rise time and minimum aberration. The SC937-02 is a surface mount, low capacitance, wide-band AES/EBU transformer. The
A3
A4
A5
A6
A7A8A9A12
DQ1
DQ0
DQ2
DQ3DQ4DQ5DQ6DQ7
A0 A1 A2 A10 A11 G NE
E W
Store/RecallControl
Column I/O
Column Decoder
Static RAM
Array
256 × 256
EEPROM Array256 × 256
Store
Recall
Input Buffers
Input Buffers
MOTOROLA DSP56009EVMUM 3-7

Peripheral Specifications
LCD Panel
SC937-02 has a very low capacitance shielded winding that reduces both radiated and received noise coupling and provides decreased jitter and improved audio quality, especially in noisy environments. EMI compliance and EMI susceptibility are improved by the use of this type of transformer. The transformer’s ratio is 1:1, primary inductance is 600 µH, inter-winding capacitance is 1.1 pF, bandwidth is 16 kHz to 100 MHz, and rise-time is 3 ns.
Figure 3-8 SC937-02 AES/EBU Transformer
3.8 LCD PANEL
illustrates the different screens of the LCD panel and the corresponding actions of the soft switches.
1
2
3
4
8
7
6
5
Input
Input Rtn
Output Rtn
Output
3-8 DSP56009EVMUM MOTOROLA

Peripheral Specifications
LCD Panel
Figure 3-9 LCD Softswitch Screens
Surr Ctr Samp
Dly Dly Rat Ext
Slct Code/v1.09
AC-3 PCM
Pro Logic > PL4
PL3 PL4 Ext Nxt
MAIN MENU
PCM
Cntr Mode > Nml
Nml Wid Phtm Nxt
Pro Logic On/Off/Auto
Out
Info Fmt LFE Nxt
Additional Menus
Out Format > 3/2
1/0 2/0 20PL Nxt
Output Format
Out Format > 3/2
2/1 2/2 3/0 Nxt
Output Format
Out Format > 3/2
3/1 3/2 Nxt
Output Format
LFE Level > On
On Off Ext
LFE
Stat > OK
Ext Nxt
AC-3 Information
Continued on New Page
AC-3 DCR Hi> 0.00
+ - Ext Nxt
AC-3 DCR Lo> 0.00
+ - Ext Nxt
AC-3... Pro
Cmp DRC Logic Nxt
AC-3
Lo Dyn Rnge Cntrl
Hi Dyn Rnge Cntrl
Pro Noise Mstr
Logic Seq Vol
ProLogic
Mstr
AC-3 Vol
AC-3
Pro Logic > Off
Off On Auto Nxt
Pro Logic On/Off
Mstr Vol >+6 dB
+ - Ext
Master Volume
Noise Gen > LF
LF C RF Nxt
Noise Sequencer
Noise Gen > LF
LS RS SW Nxt
Noise Sequencer
Noise Gen > LF
Ext Nxt
Noise Sequencer
See Right
Additional Menu
Samp Rat > 48 kHz
48 44.1 32 Ext
Sample Rate
Cntr Delay >0 ms
+ - Ext
Center Delay
Surr Delay >0 ms
+ - Ext
Surround Delay
Reset always returns here:
AC-3 Cmp>Lin
Cst1 Cst2 Lin RF
Compression
MOTOROLA DSP56009EVMUM 3-9

Peripheral Specifications
LCD Panel
Smp Rat>48 kHz
Ext Nxt
AC-3 Information
BS Rat>384 kb/s
Ext Nxt
AC-3 Information
Extra Word > No
Ext Nxt
AC-3 Information
LFE Present > No
Ext Nxt
AC-3 Information
Aud Cod > 3/2
Ext Nxt
AC-3 Information
Frm Sz > 768 wds
Ext Nxt
AC-3 Information
CRC Sz > 468 wds
Ext Nxt
AC-3 Information
BS ID > 8
Ext Nxt
AC-3 Information
BS Mod > Main
Ext Nxt
AC-3 Information
C Mx Lv > -3 dB
Ext Nxt
AC-3 Information
S Mx Lv > -3 dB
Ext Nxt
AC-3 Information
Dolby surr> Unk
Ext Nxt
AC-3 Information
Cpyrght Prot> Yes
Ext Nxt
AC-3 Information
Original BS > Yes
Ext Nxt
AC-3 Information
Dial Nm > 0
Ext Nxt
AC-3 Information
Dial Nm #2 > 0
Ext Nxt
AC-3 Information
Lang Cd > 9
Ext Nxt
AC-3 Information
Lang Cd #2 > 0
Ext Nxt
AC-3 Information
Rm Typ > -
Ext Nxt
AC-3 Information
Mix Lv > -
Ext Nxt
AC-3 Information
Rm Typ #2 > -
Ext Nxt
AC-3 Information
Mix Lv #2 > -
Ext Nxt
AC-3 Information
Tim Cod > - hr
Ext Nxt
AC-3 Information
Tim Cod > - min
Ext Nxt
AC-3 Information
Tim Cod > - sec/8
Ext Nxt
AC-3 Information
Tim Cod > - sec%8
Ext Nxt
AC-3 Information
Tim Cod > - frm
Ext Nxt
AC-3 Information
Tim Cod > - frc
Ext Nxt
AC-3 Information
Stat > OK
Ext Nxt
AC-3 Information
Back to Smp Rat Menu
3-10 DSP56009EVMUM MOTOROLA

Peripheral Specifications
Wiring For Keypad
3.9 WIRING FOR KEYPAD
A wiring diagram for a generic keypad is shown in Figure 3-10. The keypad is not provided with the DSP56009EVM.
2
3
4
5
9 8 7 6
1
10
Button # 1
Button # 16
Figure 3-10 Keypad Wiring Diagram
MOTOROLA DSP56009EVMUM 3-11

SECTION 4
DSP56009EVM SCHEMATICS
MOTOROLA DSP56009EVMUM 4-1

DSP56009EVM Schematics
Figure 4-1 DSP56009 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3Figure 4-2 Microcontroller and LCD. . . . . . . . . . . . . . . . . . . . . . . . 4-4Figure 4-3 Programmable Logic Device . . . . . . . . . . . . . . . . . . . . 4-5Figure 4-4 SRAM and External Memory Interface. . . . . . . . . . . . . 4-6Figure 4-5 RS-232 and OnCE Interface . . . . . . . . . . . . . . . . . . . . 4-7Figure 4-6 Analog-to-Digital Converter . . . . . . . . . . . . . . . . . . . . . 4-8Figure 4-7 Digital-to-Analog Converter . . . . . . . . . . . . . . . . . . . . . 4-9Figure 4-8 SPDIF I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10Figure 4-9 Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
4-2 DSP56009EVMUM MOTOROLA

DSP56009EVM Schematics
DSP56009
Fig
ure
4-1
DS
P56
009
OnC
E In
terf
ace
768
kH
z
0
.01
µF
C1
MD
7M
D6
MD
5M
D4
MD
3M
D2
MD
1M
D0
+5
V
+5
V+
5V
4-F
4,
3-F
4D
SO
4-F
5D
SI/O
S0
DS
CK
/OS
14
-F5
4-F
4/D
R
WS
TS
CK
TS
DO
0S
DO
1S
DO
2
+5
VSD
I1S
DI0
SC
KR
WS
R
~MR
D
GP
IO3
GP
IO2
GP
IO1
GP
IO0
D_H
RE
QD
_SC
KD
_MIS
OD
_SS
D_M
OS
I
+5
V
R6
10
K
EM
I3
-F3
, 5
-A4
5-G
4E
XP
1
DS
P_R
ST
3-B
4,
2-G
3,
4-F
3
DS
P_M
OD
A3
-B3
DS
P_M
OD
B3
-B3
DS
P_M
OD
C3
-B3
+5
V
~MC
AS
~MR
AS
~MW
R
MA
0M
A1
MA
2M
A3
MA
4M
A5
MA
6M
A7
MA
8M
A9
MA
10
MA
11
MA
12
MA
13
3-F
2D
SP
_Clk
MD
0M
D1
MD
2M
D3
MD
4M
D5
MD
6M
D7
MA
0M
A1
MA
2M
A3
MA
4M
A5
MA
6M
A7
MA
8M
A9
MA
10
MA
11
MA
12
MA
13
MA
14
MA
15
/~M
CS
3M
A1
6/~
MC
S2
MA
17
/~M
CS
1~M
CS
0~M
WR
~MR
D
AG
ND
3A
GN
D2
AG
ND
1A
GN
D0
AV
CC
0A
VC
C1
DG
ND
0D
GN
D1
DV
CC
0
GP
IO0
GP
IO1
GP
IO2
GP
IO3
MO
DC
/~N
MI
MO
DB
/~IR
QB
MO
DA
/~IR
QA
~RE
SE
T
QG
ND
0Q
GN
D1
QG
ND
2Q
VC
C0
QV
CC
1Q
VC
C2
MO
SI/H
A0
~S
S/H
A2
MIS
O/S
DA
SC
K/S
CL
~HR
EQ
SG
ND
0S
GN
D1
SG
ND
2
SV
CC
0S
VC
C1
WS
RS
CK
RS
DI0
SD
I1
WS
TS
CK
TS
DO
0S
DO
1S
DO
2
DS
CK
/OS
1D
SI/O
S0
DS
ODR
PV
CC
PG
ND
PC
AP
PIN
IT
EX
TA
L
71696867656463622524232220191816141312117543807927877
211581617
667270
76757473
39383736
10295292853
4142
352643
3444544048 55515756504947464560595861
33 3132 3027
DS
P5
60
0 9
DS
P56
009
MOTOROLA DSP56009EVMUM 4-3

DSP56009EVM Schematics
Microcontroller and LCD
Fig
ure
4-2
Mic
roco
ntro
ller
and
LCD
4 M
Hz
Cloc
k
RS
R/W
E
DB
0D
B1
DB
2D
B3
DB
4D
B5
DB
6D
B7
LC
D P
an
el
Vss
Vo
Vd
d
4567891011121314
1
32
U1
6
2
13C
on
tra
st2
0 K
R20
+5
VS
1S
2S
3S
4
10
KR
101
0 K
R12
10
R1
+5
V
+5
V
+5
V
ER
/W RS
10
KR
11
Cnt
l_D
ata
7-A
6
Cnt
l_C
lk7
-A6
Cn
tl_L
atc
h7
-A6
Cn
tl_M
ute
7-G
4,
3-D
4,
8-B
5
D_M
ISO
D_M
OS
ID
_SC
KD
_SS
PC
0/A
0/D
0P
C1
/A1
/D1
PC
2/A
2/D
2P
C3
/A3
/D3
PC
4/A
4/D
4P
C5
/A5
/D5
PC
6/A
6/D
6P
C7
/A7
/D7
XIR
QR
ESET IRQ
PA
7/P
AI/
OC
1P
A6
/OC
2/O
C1
PA
5/O
C3
/OC
1P
A4
/OC
4/O
C1
PA
3/I
C4
/OC
5/O
C1
PA
2/I
C1
PA
1/I
C2
PA
0/I
C3
PB
7/A
15
PB
6/A
14
PB
5/A
13
PB
4/A
12
PB
3/A
11
PB
2/A
10
PB
1/A
9P
B0
/A8
MO
DB
/VS
TB
YM
OD
A/~
LIR
EE
XT
AL
MC
68
HC
71
1E
9
XT
AL
Vss
Vd
d
PD
0/R
xDP
D1/
TxD
PD
2/M
ISO
PD
3/M
OS
IP
D4/
SC
KP
D5/
~S
S
ST
RB
/R/~
W
ST
RA
/AS
PE
0/A
N4
PE
1/A
N1
PE
2/A
N2
PE
3/A
N3
PE
4/A
N4
PE
5/A
N5
PE
6/A
N6
PE
7/A
N7
VR
H
VR
L
910111213141516
18
35 36 37 38 39 40 41 42
2 3
57
1
268
25 24 23 22 21 202728293031323334
1917
6
4 4344454647484950
52 51
U2
Mic
roco
ntro
ller
12
34
56
78
910
Key
pad
exp
J18
7-A
3,
3-F
36
-G3
, 8
-B4
EX
P2
HC
11_C
lk4
-F2
PC
0P
C1
PC
2P
C3
PC
4P
C5
PC
6P
C7
RS
R/W
E
HC
11_G
PIO
5-F
5
PC
0P
C1
PC
2P
C3
PC
4P
C5
PC
6P
C7
IR_R
cv3
-B4
+5
V
R8
10
K
R3
10
K
12JP
8
2-pi
n m
ale
head
er
17
28
39
4 5 6
JP9
Con
figur
atio
nJu
mpe
rs
+5
V
4-4 DSP56009EVMUM MOTOROLA

DSP56009EVM Schematics
Programmable Logic Device
Fig
ure
4-3
Pro
gram
mab
le L
ogic
Dev
iceTx
Rx
(768
kH
z)
Rx -
Jum
per-
Clo
cked
by
crys
tal
No
Jum
per-
Clo
cked
by
Rcv
d S P
Tx -
Jum
per-
Clo
cked
by
crys
tal
No
Jum
per-
Clo
cked
by
DS
P
Jum
per-
11
.289
6 M
Hz
No
Jum
per-
12.
288
MH
z
IR R
cv.
12 3
Infa
red
Rec
eive
rU
22
+5
V
10
KR
21
0 K
R4
10
KR
5
+5
V
10
KR
91
0 K
R14
10
KR
15
1234
Inte
rru
pts
J19
DS
P_M
OD
A1-
E3
DS
P_M
OD
B1-
E4
DS
P_M
OD
C1-
E4
1-E
3,
2-G
3,
4-F
3D
SP
_RS
T
12
34
56
Mod
e S
elec
tJP
3
+5
V
5-D
6N
VR
AM
_G
+5
V
Fs_
sens
5-D
2,
8-B
5
AD
A_C
lk7
-A2
32
1
Osc
illat
or1
1.2
89
6 M
Hz
Y1
32
1 12
.28
8 M
Hz
Osc
illat
or
Y2
10
KR
1
1 2JP
2C
lock
Sel
ect
+5
V
AD
A_
Clk
/28
-C3
Cn
tl_M
ute
7-G
4,
2-B
4,
8-B
5
~C
ntl_
Mu
te6
-F4
AC
K_R
ST
4-F
4
AC
K4
-F4
DS
O1
-I4
, 4
-F4
7-A
3,
5-E
4,
2-F
4,
8-G
2,
6-G
3,
8-B
4
EX
P2
R48
10
K
+5
V
6-G
25
39
0_
Clk
8-G
18
41
2_
MC
K
EP
M70
32
Vcc
Gnd
Vcc
Gnd
Vcc
Gnd
Vcc
Gnd
42 3 33
4
32 15 35 43
9
44 23 31 34 38 30
16
17
28
24
27
12 4011 1410872
29
37651
13 18
36
19 20 21 22
26 25
41
39
U5
PLD
1-H
3D
SP
_Clk
IR_R
cv2
-F4
10
KR
57
1 2
3 4JP
5M
aste
rS
elec
t
~MR
D
5-A
4,
1-F
5E
MI
GP
IO2
WS
TS
CK
TW
SR
~WS
RG
PIO
3
MOTOROLA DSP56009EVMUM 4-5

DSP56009EVM Schematics
SRAM and External Memory Interface
Fig
ure
4-4
SR
AM
and
Ext
erna
l Mem
ory
Inte
rfac
e
MD
0M
D1
MD
2M
D3
MD
4M
D5
MD
6M
D7
+5
V
EM
I3
-F3
, 1
-F5
+5
V
~MC
AS
~MR
AS
~MW
R
MA
0M
A1
MA
2M
A3
MA
4M
A5
MA
6M
A7
MA
8M
A9
MA
10
MA
11
12
34
56
78
910
1112
1314
1516
1718
1920
2122
2324
2526
2728
2930
3132
3334
3536
3738
3940
4142
4344
4546
4748
4950
Con
nect
orE
xpan
sion
J5
WS
RS
CK
RS
DI0
SD
I1
WS
TS
CK
TS
DO
0S
DO
1S
DO
2
WS
TS
CK
TS
DO
0S
DO
1S
DO
2
WS
RS
CK
RS
DI0
SD
I1
D_S
CK
D_S
SD
_MIS
OD
_MO
SI
D_H
RE
Q
+5
V
EX
P2
7-A
3,
3-F
3,
2-F
4,
8-G
2,
6-G
3,
8-B
4
1-I
4E
XP
1
R19
10
K1
0 K
R45
+5
V
MA
12
MA
7M
A6
MA
5M
A4
MA
3M
A2
MA
1M
A0
MD
0M
D1
MD
2
~WE
nc A7
A6
A5
A4
A3
A2
A1
A0
D0
D1
D2
Vss
D3
D4
D5
D6
D7
~EA
10
~GncA9
A8nc
~NE
Vcc
ST
K1
0C
48
1 2 3 4 5 6 7 8 910 11 12 13 14
1516171819202122232425262728
SR
AM
/nvR
AM
U6
~MW
RM
A1
3M
A8
MA
9M
A1
1
MD
7M
D6
MD
5M
D4
MD
3
GP
IO3
GP
IO2
GP
IO1
GP
IO0
DQ
0D
Q1
DQ
2D
Q3
DQ
4D
Q5
DQ
6D
Q7
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9~R
AS
~CA
S
~W30
-Pin
SIM
M S
oc
ke
t
Vcc
Vcc
Vss
Vss
A1
0A
11
Q8
D8
~C
AS
8
36101316202325
4578111214151718
27
2
211 30
22
1924
26 28 29
9
U1
5
Fs_
sens
3-D
6,
8-B
51
23
45
6
JP7
NA
D S
elec
t
DR
cv_B
lk8-
G3
DT
rn_B
lk8
-B5
DR
cv_C
S8-
G3
DT
rn_C
S8
-B5
3-F
2N
VR
AM
_G
D_S
CK
D_S
SD
_MIS
OD
_MO
SI
HC
11_G
PIO
2-B
4
MA
10
GP
IO2
GP
IO3
4-6 DSP56009EVMUM MOTOROLA

DSP56009EVM Schematics
RS-232 and OnCE Interface
Fig
ure
4-5
RS
-232
and
OnC
E In
terf
ace
Res
et
C6
1 µF
C5
1 µF
C7
1 µF
C4
1 µF
+5
V
1 2 3 4 5
6 7 8 9
J4 OnC
E/H
ost
MA
X2
32
V+
C1-
C1+
Vcc
V-
C2+
C2-
T1
ou
tT
1in
T2
ou
tT
2in
R1i
n
R2i
n
R1
ou
t
R2
ou
tG
nd
2 1 3
16
6
4 5
1411
710
13
8
12 9
15
RS
-232
Tra
nsce
iver
U4
+5
V
R17
10
K S5
12
34
Ser
ial C
onfig
JP1
RS
TP
B1
PB
0IR
Q/V
ppP
A0
PA
1P
A2
PA
3
OS
C1
OS
C2
Vss
Vd
dP
A7
PA
6P
A5
PA
4
MC
68
70
5K
11
2 34
5 6 7 8
16 15 14 13 12 11 10 9
Con
trol
ler
OnC
E
U2
4D
ebR
ed
D5
15
00
R16
+5
V
DS
P_R
ST
1-E
3,
3-B
4,
2- G
/DR
1-I
3
AC
K_R
ST
3-D
5D
SO
1-I
4,
3-F
4
AC
K3
-D5
DS
CK
/OS
11
-I4
DS
I/OS
01
-I4
HC
11_C
lk2
-D2
1 µF
C2
2
Y3
4 M
Hz
C2
47
pF
C3
47
pF
D7
1N
58
27
MOTOROLA DSP56009EVMUM 4-7

DSP56009EVM Schematics
Analog-to-Digital Converter
Fig
ure
4-6
Ana
log-
to-D
igita
l Con
vert
er
Rig
ht
Ana
log
Inp
ut
Lef
t A
nal
og
Inpu
t
321
U1
9
321
U2
0
567
U2
0
20
KR
21
20
KR
27
10
KR
23
10
KR
24
10
KR
291
0 K
R30
+5
V
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
7-A
3,
3-F
8-G
2,
8-B
~WS
RS
CK
RS
DI0
0.2
2 µ
F
C1
2
10
0 µ
FC
11
AG
ND
AP
D
AIN
L+
AIN
L-
AC
AL
LGN
D
VL
+
TS
T01
DC
AL
DP
D
CM
OD
E
SM
OD
E
L/~
RS
CLK
SD
AT
AFS
YN
C
VD
+
DG
ND
ICLK
D
OC
LKD
TS
T02
ICLK
AV
A+
VA
-
AIN
R+
AIN
R-
VR
EF-
VR
EF+
12
3 4
5
6
7
89
10
1112 13141516
17 18
19
20 21
2223
24
25 26 2728
U7
A/D
Co
nve
rte
rC
S5
39
0
39
.2
R25
R26
39
.2
R31
39
.2
R32
39
.2
NP
O6
.8 n
FC
20
NP
O6
.8 n
FC
856
7U
19
13
2R
222
0 K
13
2R
282
0 K
+A
Vcc
35
~C
ntl_
Mu
te3
-D5
-AV
ss
R47
51
C
63
0.0
1 µ
F
AG
ND
C2
11
00
µF
AG
ND
AG
ND
1
2
J6
1
2
J7
4-8 DSP56009EVMUM MOTOROLA

DSP56009EVM Schematics
Digital-to-Analog Converter
Fig
ure
4-7
Dig
ital-t
o-A
nalo
g C
onve
rter
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
AG
ND
Cnt
l_D
ata
2-B
3C
ntl_
Clk
2-B
4C
ntl_
La
tch
2-B
4
Cn
tl_M
ute
2-B
4,
3-D
4,
8-B
5
+A
Vcc
+A
Vcc
AG
ND
AG
ND
AG
ND
+A
Vcc
+A
Vcc
+A
Vcc
EX
P2
3-F
3,
5-E
4,
2-F
4,
8-F
1,
6-G
3,
8-A
4
-AV
ss
-AV
ss
-AV
ss
R38
60
0
R39
60
0
R40
60
0
R41
60
0
R42
60
0
AO
UT
L
AO
UTR
SD
AT
AI
~DE
M/S
CLK
LRC
K
VA
+M
CLK
AG
ND
8 5
1 2 3
74
6
U8
CS
43
31
D/A
Co
nve
rte
r
AO
UT
L
AO
UTR
SD
AT
AI
~DE
M/S
CLK
LRC
K
VA
+M
CLK
AG
ND
8 5
1 2 3
74
6
U9
CS
43
31
D/A
Co
nve
rte
r
AO
UT
L
AO
UTR
SD
AT
AI
~DE
M/S
CLK
LRC
K
VA
+M
CLK
AG
ND
8 5
1 2 3
74
6
U1
0C
S4
33
1D
/A C
on
vert
er
ZCE
N
~CS
SD
AT
AI
VD
+
DG
ND
SC
LK
SD
AT
A0
~MU
TE
AIN
R
AG
ND
R
AO
UTR
VA
+
VA
-
AO
UT
L
AG
ND
L
AIN
L
1
23
4
5
67
8
9
10
11
12 13
14
15
16
U1
1C
S3
31
0D
ig V
ol C
ntrl
ZCE
N
~CS
SD
AT
AIV
D+
DG
ND
SC
LK
SD
AT
A0
~MU
TE
AIN
R
AG
ND
R
AO
UTR
VA
+
VA
-
AO
UT
L
AG
ND
L
AIN
L
1
23
4
5
67
8
9
10
11
12 13
14
15
16
U1
2C
S3
31
0D
ig V
ol C
ntrl
ZCE
N
~CS
SD
AT
AI
VD
+
DG
ND
SC
LK
SD
AT
A0
~MU
TE
AIN
R
AG
ND
R
AO
UTR
VA
+
VA
-
AO
UT
L
AG
ND
L
AIN
L
1
23
4
5
67
8
9
10
11
12 13
14
15
16
U1
3C
S3
31
0D
ig V
ol C
ntrl
C1
3.0
02
7 µ
FC
14
.00
27
µF
C1
5.0
02
7 µ
F
C1
7.0
02
7 µ
FC
18
.00
27
µF
AG
ND
AG
ND
AG
ND
0.1
µF
C4
4
AG
ND
C4
50
.1 µ
F
C4
60
.1 µ
F AG
ND
1
2
J8 Le
ft O
utp
ut
1
1
2
J9 Rig
ht
Ou
tpu
t 1
1
2
J12
Le
ft O
utp
ut
3
1
2
J13
Rig
ht
Ou
tpu
t 3
1
2
J10
Le
ft O
utp
ut
2
1
2
J11
Rig
ht
Ou
tpu
t 2
+A
Vcc
3-F
2A
DA
_Clk
1 µF
C2
8
1 µF
C6
6
56
KR51
56
KR
52
C7
21
µF
C7
31
µF
R53
56
K
R54
56
KC
16
.00
27
µF
C7
41
µF
C7
51
µF
R55
56
K
R56
56
K 60
0
R37
AG
ND
10
R50
WS
TS
CK
TS
DO
0S
DO
1S
DO
2
MOTOROLA DSP56009EVMUM 4-9

DSP56009EVM Schematics
SPDIF I/O
Fig
ure
4-8
SP
DIF
I/O
25
6F
s
Mod
e 3
12
8Fs
Mo
de 4
1
2
J14
CP
340
InR
77
5
37
4
R43
90
.9
R44
+5
V
1
2
J15
CP
340
Out
+5
V
+5
V
SD
O0
SC
KT
WS
T
EX
P2
7-A
3,
3-F
3,
5-E
4,
2-F
4,
8-F
1,
6-G
3
+5
V
Fs_
sens
3-D
6,
5-D
2
~PR
O~
C1
/FC
0
TR
NP
T/F
C1
~C
6/~
C2
~C
7/~
C3
EM
1/~
C8
EM
0/~
C9
~C
9/~
C1
5
~RS
T
CB
L/S
BC
UC/S
BF
VSD
AT
A
SC
K
FSY
NC
TXN
TXP
M0
M1
M2
GN
D
CS
84
02
A
MC
KV
D+
23 2441
1314
12161511109867
519
1720 212223
18
AE
S/E
BU
Tra
nsm
itter
U2
1
Cn
tl_M
ute
7-G
4,
2-B
4,
3-D
4
AD
A_
Clk
/23
-F2
Fib
re O
ptic
Tra
nsm
itte
r
12 3
J16
Opt
ical
Out
Fib
re O
ptic
Rec
eive
r
1 23J1
7O
ptic
al In
+5
V
C2
60
.1 µ
F
C2
70
.04
7 µ
F
1 K
R46
+A
Vcc
AG
ND
+5
V
7-A
3,
3-F
3,
5-E
4,
2-F
4,
6-G
3,
8-A
4
EX
P2
FIL
T
C0
/E0
CA
/E1
CB
/E2
CC
/F0
CD
/F1
CE
/F2
ERF
CS
12/F
CK
RX
N
RXP
AG
ND
CB
LUC
FSY
NC
SD
AT
A
SC
K
VE
RF
MC
K
CS
84
12
VA
+V
D+
DG
ND
SE
L
M0
M1
M2
M3
2065432272513109
21227
151411126122819
8
16 17 18 2324
U2
3
AE
S/E
BU
Rec
eive
r
SC
KR
SD
I1
WS
R+
5V
3-F
48
41
2_
MC
K
DR
cv_C
S5
-F1
DR
cv_B
lk5
-D1
DT
rn_B
lk5
-D2
DT
rn_C
S5
-F2
R49
10
K
12
34
56 Inpu
t S
elec
t
JP4
0.1
µF
C6
5
2 10
.1 µ
FC
68
0.1
µF
C6
7
AG
ND
1 4
5 82S
C9
37
-02
L4
1 4
8 56
SC
93
7-0
2L
3
4-10 DSP56009EVMUM MOTOROLA

DSP56009EVM Schematics
Power Supply
Fig
ure
4-9
Pow
er S
uppl
y
C2
9-C
37
-U
1
C
38
-U2
C3
9-U
4C
40
,C4
1-U
5
C4
2-U
6C
43
-U7
C4
7-U
21
C4
8-U
23
Dig
ita
l d
ecou
pli
ng
Cap
s —
all
0.1
µF
unle
ss
othe
rwis
e no
ted
C4
9,C
50
-U7
C5
1-
U8
C5
2-
U9
C5
3-
U1
0C
54
,C5
5,C
69
-U1
1
C5
6,C
57
,C7
0-U
12
C5
8,C
59
,C7
1-U
13
C6
0-U
19
C6
1-U
20
C6
2-U
23
Ana
log
De
cou
plin
g C
aps
— a
ll 0
.1 µ
F
unl
ess
oth
erw
ise
not
ed
5-2
0 V
AC
/DC
Pow
er I
nput
J1
10
0 µ
FC
19
1 µF
C9
1 µFC
10
C3
3
+5
V
1N
58
27
D1
1N
58
27
D2
1N
58
27
D3
1N
58
27
D4
L1
Fer
rite
C3
0C
31
C3
2C
29
C3
4C
35
C3
6C
37
C3
8C
39
C4
0
Pow
er I
nput
Ter
min
al B
lock
J2
15
00
R
18
1 2 3
J3
Ana
log
Pow
erC
onne
ctor
C2
4
1 µF
12
JP6
Gro
und
Con
nect
Gre
enP
ower
D6
C5
3C
52
C5
1C
54
C5
6C
58
C6
0C
61
C6
2C
49
C4
2C
43
C4
1C
47
C4
8
+A
Vcc
IN
GR
OU
NDO
UT
2
13
MC
78
05
Vol
tage
Reg
ulat
or
U1
4
10
0 µ
FC
23
10
0 µ
FC
64
C6
9C
70
C7
1
AG
ND
C2
5
1 µF
C5
0C
55
C5
7C
59
-AV
ss
VO
UT
VIN
GN
D
1
2
3
MC
78
05
Vol
tage
Reg
ulat
or
U1
7 VO
UT
VIN
GN
D2
1
3
MC
79
05
Vol
tage
Reg
ulat
or
U1
8
DG
nd
MOTOROLA DSP56009EVMUM 4-11

SECTION 5
DSP56009EVM PLD SPECIFICATION AND EVM PARTS LIST
MOTOROLA DSP56009EVMUM 5-1

DSP56009EVM PLD Specification and EVM Parts List
5.1 EPM7032 PLD SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . 5-35.1.1 PLD Schematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-35.1.2 PLD Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-55.2 EVALUATION MODULE PARTS LIST . . . . . . . . . . . . . . . . . 5-8
5-2 DSP56009EVMUM MOTOROLA

DSP56009EVM PLD Specification and EVM Parts List
EPM7032 PLD SPecifications
5.1 EPM7032 PLD SPECIFICATIONS
5.1.1 PLD Schematics
The PLD schematic is illustrated on the following page in Figure 5-1.
MOTOROLA DSP56009EVMUM 5-3

DSP56009EVM PLD Specification and EVM Parts List
EPM7032 PLD SPecifications
M
M
M
11
RC
T
Figure 5-1 PLD Schematic
ODA_SEL
IRQA
ODB_SEL
IRQB
ODC_SEL
IRQC
74157DSP_RST
DSP_MODA
DSP_MODB
DSP_MODC
NVRAM_G
A1
B1
A2
B2
A3
B3
A4
B4
GND
Y1
Y2
Y3
Y4
SEL
Multiplexer
EXP2_GPIO2
EXP2_GPIO3
74393
Counter
A1
A2
CLR1
CLR2
Q1A
Q1B
Q1C
Q1DQ2AQ2BQ2CQ2D
ADA_Clk
EXP2_SCKT
EXP2_WST
Clock_in Clock_Out4M_Clk 1M_Clk
clkdiv4
clockpr4
InputAInputBSelASelB mux4x1
D3D2
D1D0S1
S0
2MHz_Clk1MHz_Clk
VMASTER_SEL
FS_SENS
XMASTER_SEL
8412_MCK
74393M
CKA
CKRDSP_CLK
QA
QB
QCQD
ADA_CLK
5390_CLK
OutputA
OutputB
NANDLTCH
ACK_RST
DSO ACK
CNTL_MUTE
EXP2_~WSR
~CNTL_MUTE
EXP2_WSR
5-4 DSP56009EVMUM MOTOROLA

DSP56009EVM PLD Specification and EVM Parts List
EPM7032 PLD SPecifications
5.1.2 PLD Equations
The following data represents the PLD equations for the DSP56009EVM:
Device: EPM7032TC44
*************************EQUATIONS*************************
ACK_RST : INPUT;CNTL_MUTE : INPUT;DSO : INPUT;DSP_RST : INPUT;EMI_MRD : INPUT;EXP2_~WSR : INPUT;FS_SENS : INPUT;IRQA : INPUT;IRQB : INPUT;IRQC : INPUT;MODA_SEL : INPUT;MODB_SEL : INPUT;MODC_SEL : INPUT;RCVMASTER_SEL : INPUT;TXMASTER_SEL : INPUT;4M_Clk : INPUT;11MHZ_CLK : INPUT;12MHZ_CLK : INPUT;8412_MCK : INPUT;
% ACK = _LC031 % ACK = LCELL( _EQ001 $ GND); _EQ001 = _X001; _X001 = EXP( DSO & _X002); _X002 = EXP( ACK_RST & _X001);
% ADA_CLK = _LC006 % ADA_CLK = LCELL( _EQ002 $ GND); _EQ002 = FS_SENS & !RCVMASTER_SEL & 12MHZ_CLK # !FS_SENS & RCVMASTER_SEL & 8412_MCK # !FS_SENS & !RCVMASTER_SEL & 11MHZ_CLK;
MOTOROLA DSP56009EVMUM 5-5

DSP56009EVM PLD Specification and EVM Parts List
EPM7032 PLD SPecifications
% ADA_Clk/2 = _LC019 %% ADA_Clk/2 = |74393:15|Q1A % ADA_Clk/2 = TFFE( VCC, _EQ003, VCC, VCC, VCC); _EQ003 = _X003 & _X004 & _X005; _X003 = EXP(!FS_SENS & RCVMASTER_SEL & 8412_MCK); _X004 = EXP( FS_SENS & !RCVMASTER_SEL & 12MHZ_CLK); _X005 = EXP(!FS_SENS & !RCVMASTER_SEL & 11MHZ_CLK);
% DSP_CLK = _LC020 %% DSP_CLK = |74393m:82|QD % DSP_CLK = TFFE( _EQ004, !12MHZ_CLK, VCC, VCC, VCC); _EQ004 = _LC009 & _LC014 & _LC027;
% DSP_MODA = _LC010 % DSP_MODA = LCELL( _EQ005 $ GND); _EQ005 = DSP_RST & IRQA # !DSP_RST & MODA_SEL;
% DSP_MODB = _LC011 % DSP_MODB = LCELL( _EQ006 $ GND); _EQ006 = DSP_RST & IRQB # !DSP_RST & MODB_SEL;
% DSP_MODC = _LC012 % DSP_MODC = LCELL( _EQ007 $ GND); _EQ007 = DSP_RST & IRQC # !DSP_RST & MODC_SEL;
% EXP2_GPIO2 = _LC016 %EXP2_GPIO2 = TRI(_LC016, GLOBAL(!DSP_RST));_LC016 = LCELL( GND $ GND);
% EXP2_GPIO3 = _LC021 %EXP2_GPIO3 = TRI(_LC021, GLOBAL(!DSP_RST));_LC021 = LCELL( GND $ GND);
% EXP2_SCKT = |74393:15|Q1B %EXP2_SCKT = TRI(_LC002, GLOBAL(!TXMASTER_SEL));_LC002 = TFFE( ADA_Clk/2, _EQ008, VCC, VCC, VCC); _EQ008 = _X003 & _X004 & _X005;
% EXP2_WSR = _LC003 % EXP2_WSR = LCELL(!EXP2_~WSR $ GND);
5-6 DSP56009EVMUM MOTOROLA

DSP56009EVM PLD Specification and EVM Parts List
EPM7032 PLD SPecifications
% EXP2_WST = |74393:15|Q2D %EXP2_WST = TRI(_LC017, GLOBAL(!TXMASTER_SEL));_LC017 = TFFE( _EQ009, !_LC007, VCC, VCC, VCC); _EQ009 = _LC004 & _LC013 & _LC026;
% NVRAM_G = _LC001 % NVRAM_G = LCELL( _EQ010 $ GND); _EQ010 = DSP_RST & EMI_MRD # !DSP_RST & MODC_SEL;
% 1M_Clk = _LC025 %% 1M_Clk = |clkdiv4:116|Clock_Out % 1M_Clk = TFFE( VCC, _LC024, VCC, VCC, VCC);
% 5390_CLK = _LC023 % 5390_CLK = LCELL( _EQ011 $ GND); _EQ011 = FS_SENS & !RCVMASTER_SEL & 12MHZ_CLK # !FS_SENS & RCVMASTER_SEL & 8412_MCK # !FS_SENS & !RCVMASTER_SEL & 11MHZ_CLK;
% |clkdiv4:116|:1 % _LC024 = TFFE( VCC, 4M_Clk, VCC, VCC, VCC);
% |74393:15|Q1C = |74393:15|:5 %_LC005 = TFFE( _EQ012, _EQ013, VCC, VCC, VCC); _EQ012 = ADA_Clk/2 & _LC002; _EQ013 = _X003 & _X004 & _X005;
% |74393:15|Q1D = |74393:15|:9 %_LC007 = TFFE( _EQ014, _EQ015, VCC, VCC, VCC); _EQ014 = ADA_Clk/2 & _LC002 & _LC005; _EQ015 = _X003 & _X004 & _X005;
% |74393:15|Q2A = |74393:15|:28 %_LC004 = TFFE( VCC, !_LC007, VCC, VCC, VCC);
% |74393:15|Q2B = |74393:15|:29 %_LC013 = TFFE( _LC004, !_LC007, VCC, VCC, VCC);
% |74393:15|Q2C = |74393:15|:30 %_LC026 = TFFE( _EQ016, !_LC007, VCC, VCC, VCC); _EQ016 = _LC004 & _LC013;
MOTOROLA DSP56009EVMUM 5-7

DSP56009EVM PLD Specification and EVM Parts List
Evaluation Module Parts List
% |74393m:82|QA = |74393m:82|:1 %_LC014 = TFFE( VCC, !12MHZ_CLK, VCC, VCC, VCC);
% |74393m:82|QB = |74393m:82|:3 %_LC009 = TFFE( _LC014, !12MHZ_CLK, VCC, VCC, VCC);
% |74393m:82|QC = |74393m:82|:5 %_LC027 = TFFE( _EQ017, !12MHZ_CLK, VCC, VCC, VCC); _EQ017 = _LC009 & _LC014;
% ~CNTL_MUTE = _LC029 % ~CNTL_MUTE = LCELL(!CNTL_MUTE $ GND);
5.2 EVALUATION MODULE PARTS LIST
The following four pages contain, in table form, information on the parts and devices on the Evaluation Module. Contact information for suppliers of key devices, as indicated by footnote, is also included at the end of the table.
Table 5-1 DSP56009EVM Parts List
Part Designator Manufacturer Part Number Description
U1 Motorola DSP56009 DSP
U2 Motorola MC68HC711E9 Microcontroller
U24 Motorola MC68HC705K1 Microcontroller (OnCE)
U7 Crystal a CS5390-KS ADC
U8 U9 U10 Crystal a CS4331-KS DAC
U21 Crystal a CS8402-CS AES/EBU Transmitter
U23 Crystal a CS8412-CS AES/EBU Receiver
U11 U12 U13 Crystal a CS3310-KS Digital Volume Controller
5-8 DSP56009EVMUM MOTOROLA

DSP56009EVM PLD Specification and EVM Parts List
Evaluation Module Parts List
er
o-
L3 L4 Scientific Conversion b
SC937-02 Audio Isolation Transform
U6 Simtek c STK1068-S45 SRAM/nVRAM
U16 Hitachi LM052L LCD Module
U14 U17 Motorola MC7805 Voltage Regulator
U18 Motorola MC7905 Voltage Regulator
U19 U20 Motorola MC33078 Op-Amp
U5 Altera EPM7032TC44-12 PLD
D1 D2 D3 D4 D7 Rectron FM4001 Rectifier, SMD
U4 Maxim MAX232CSE RS232 Transceiver
C4 C5 C6 C7 C9 C10 C22 C24 C25
Murata GRM42-6Y5V105Z16BL 1.0 µF capacitor
C28 C66 C72 C73 C74 C75
TDK CC1206CY5V335ZTR 3.3 µF capacitor
C1 C63 Murata GRM42-6XR103K050BD 0.01 µF capacitor
C8 C20 Venkel C1210C0G500-682JNE 6.8 nF capacitor
C11 C19 C21 C23 C64 Future SME25T101M6X16LL 100 µF Aluminum Electrlytic capacitor
C2 C3 Murata GRM42-6C0G470J050BD
47 pF capacitor
C26 C29 C30 C31 C33 C34 C35 C36 C37 C38 C39 C40 C41 C42 C43 C44 C45 C46 C47 C48 C49 C50 C51 C52 C53 C54 C55 C56 C57 C58 C59 C60 C61 C62 C65 C67 C68 C69 C70 C71
Murata GRM42-6X7R104K050BL
0.1 µF capacitor
C27 Venkel C1206X7R500-473KNE 0.047 µF capacitor
C13 C14 C15 C16 C17 C18
Venkel C1206X7R500-272KNE 0.0027 µF capacitor
C12 Venkel C1206X7R500-224KNE 0.22 µF capacitor
Part Designator Manufacturer Part Number Description
MOTOROLA DSP56009EVMUM 5-9

DSP56009EVM PLD Specification and EVM Parts List
Evaluation Module Parts List
illa-
la-
r
R50 10 Ω 1/4W resistor
R25 R26 R31 R32 Venkel CR1206-8W-39R2FT 39.2 Ω 1/4W resistor
R47 Venkel CR1206-8W-51R1FT 51 Ω 1/4W resistor
R7 75 Ω 1/4W resistor
R44 Venkel CR1206-8W-90R9FT 90.9 Ω 1/4W resistor
R43 Venkel CR1206-8W-3740FT 374 Ω 1/4W resistor
R37 R38 R39 R40 R41 R42
Future NRC12F604OTR 604 Ω 1/4W resistor
R46 Future CRCW1206-102JRT1 1.0 KΩ 1/4W resistor
R16 R18 Newark 44F6300-1.5K 1.5 KΩ 1/4W resistor
R1 R2 R3 R4 R5 R6 R8 R9 R10 R11 R12 R13 R14 R15 R17 R19 R23 R24 R29 R30 R45 R48 R49 R57
Future CR32-1002F-T 10 KΩ 1/4W resistor
R21 R27 20 kΩ 1/4W resistors
R51 R52 R53 R54 R55 R56
56 kΩ 1/4W resistors
R20 R22 R28 Digikey D4AA24-ND 20 kΩ 1/4W trimpot thru-hole
Y1 MMD MB100HA-11.2896MHz 11.2896 MHz Clock Osctor
Y2 MMD MB100HA-12.288MHz 12.288 MHz Clock Osciltor
Y3 Ecliptek EC2-040-4.000MHz-I 4.0 MHz Crystal
JP2 JP6 JP8 2-pin single row header
J19 4-pin single row header
JP1 JP5 4-pin double row header
JP3 JP4 JP7 6-pin double row header
J18 10-pin double row heade
Part Designator Manufacturer Part Number Description
5-10 DSP56009EVMUM MOTOROLA

DSP56009EVM PLD Specification and EVM Parts List
Evaluation Module Parts List
)
ive
mit
ec-
on-
at
a.Crystal Semiconductor Corporation, P.O. Box 17847, Austin, TX 78760, (512) 445-7222 Fax: (512) 462-2723b.Scientific Conversion, Inc., 42 Truman Drive, Novato, CA 94947,(415) 892-2323, Fax: (415) 892-2321c.Simtek Corporation, 1465 Kelly Johnson Blvd., Colorado Springs, CO 80920, (800) 637-1667, Fax: (719531-9481
on PC board for U16 14-pin single row femaleheader
on PC board for U16 14-pin single row male header
J5 50-pin double row male header
on PC board for U15 SIMM socket
J17 Sharp GP1F32R Optical Connector-Rece
J16 Sharp GP1F32T Optical Connector-Trans
J1 Mouser 16PJ031 2.1 mm DIN power conntor
J4 Mouser 152-3409 PC mount DB9 female cnector
J7 J9 J11 J13 J6 J8 J10 J13 J14 J15
Mouser 161-4215 RCA Jack
on PC board for U2 McKensie PLCC-52P-T 52-pin PLCC socket
J2 2-position terminal block
J3 3-position terminal block
S1 S2 S3 S4 S5 6mm pushbutton switch
D6 Future HLMP1790 Green LED 2 mA, 1.8 V
D5 Future HLMP1700 Red LED 2 mA, 1.8 V
U22 Sharp GP1U56Y Infrared receiver
L1 Future BL01RN1-A62 Ferrite
on PC board for U14 TO-220 0.5” compact hesink
Part Designator Manufacturer Part Number Description
MOTOROLA DSP56009EVMUM 5-11

SECTION 6
EXAMPLE TEST PROGRAM
MOTOROLA DSP56009EVMUM 6-1

Example Test Program
6.1 OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-36.2 WRITING THE PROGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . 6-46.2.1 Source Statement Format . . . . . . . . . . . . . . . . . . . . . . . . . 6-46.2.2 Example Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-56.3 ASSEMBLING THE PROGRAM . . . . . . . . . . . . . . . . . . . . . . 6-76.3.1 Assembler Command Format . . . . . . . . . . . . . . . . . . . . . . 6-76.3.2 Assembler Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-86.3.3 Assembler Directives . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-116.3.4 Assembling the Example Program . . . . . . . . . . . . . . . . . 6-166.4 MOTOROLA DSP LINKER . . . . . . . . . . . . . . . . . . . . . . . . . 6-166.4.1 Linker Options. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-176.4.2 Linker Directives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-236.5 INTRODUCTION TO THE DEBUGGER SOFTWARE . . . . 6-246.6 RUNNING THE PROGRAM . . . . . . . . . . . . . . . . . . . . . . . . 6-26
6-2 DSP56009EVMUM MOTOROLA

Example Test Program
Overview
6.1 OVERVIEW
This section contains an example that illustrates how to develop a very simple program for the DSP56009. This example has been designed for users who have little or no experience with the DSP development tools. The example demonstrates the form of assembly programs, gives instructions on how to assemble programs, and shows how the Debugger can be used to verify the operation of programs.
The rounded blocks represent the assembly and object files. The white blocks represent software programs to assemble and link the assemble programs. The gray blocks represent hardware products. The following sections give basic information regarding the assembly program, the Assembler, the Linker and the object files. Detailed information about these subjects can be found in the Assembler and Linker manuals provided with the Motorola DSP CLAS software package, available through your Motorola sales office or distributor. The documentation is also available through the Motorola DSP internet URL http://www.motorola-dsp.com.
Figure 6-1 Development Process Flow
Assembly Program
Assembler
Relocatable
Linker
Executable
Object File
Object File
DSP56009EVM
*.asm
*.cln
*.cld
ADS Command
Converter Card
DSP56009
68HC711E9
MOTOROLA DSP56009EVMUM 6-3

Example Test Program
Writing the Program
6.2 WRITING THE PROGRAM
The following sections describe the format of assembly language source statements and give an example assembly program.
6.2.1 Source Statement Format
Programs written in assembly language consist of a sequence of source statements. Each source statement may include up to six fields separated by one or more spaces or tabs: a label field, an operation field, an operand field, up to two data transfer fields, and a comment field. For example, the following source statement shows all six possible fields:
6.2.1.1 Label FieldThe label field is the first field of a source statement and can take one of the following forms:
• A space or tab as the first character on a line ordinarily indicates that the label files is empty and that the line has no label.
• An alphabetic character as the first character indicates that the line contains a symbol called a label.
• An underscore as the first character indicated that the label is a local label.
With the exception of some directives, a label is assigned the value of the location counter of the first word of the instruction or data being assembled. A line consisting of a label only is a valid line and has the effect of assigning the value of the location counter to the label.
6.2.1.2 Operation FieldThe operation field appears after the label field and must be preceded by at least one space or tab. Entries in the operation field may be one of three types:
• Opcode—mnemonics that correspond directly to DSP machine instructions
• Directive—special operation codes known to the Assembler which control the assembly process
trm mac x0,y0,a x:(r0)+,x0 y:(r4)+,y0 ;Text
Label Operation Operand X Data Transfer Y Data Transfer Comment
6-4 DSP56009EVMUM MOTOROLA

Example Test Program
Writing the Program
• Macro call—invocation of a previously defined macro which is to be inserted in place of the macro call
6.2.1.3 Operand FieldThe interpretation of the operand field is dependent on the contents of the operation field. The operand field, if present, must follow the operation field and must be preceded by at least one space or tab.
6.2.1.4 Data Transfer FieldsMost opcodes can specify one or more data transfers to occur during the execution of the instruction. These data transfers are indicated by two addressing mode operands separated by a comma, with no embedded blanks. If two data transfers are specified, they must be separated by one or more blanks or tabs. Refer to the DSP56000 Family Manual for a complete discussion of addressing modes that are applicable to data transfer specifications.
6.2.1.5 Comment FieldComments are not considered significant to the Assembler, but can be included in the source file for documentation purposes. A comment field is composed of any characters that are preceded by a semicolon.
6.2.2 Example Program
This program takes two lists of data, one in X memory, and one in Y memory, and calculates the sum of the products of the two lists. Calculating the sum of products is the basis for many DSP functions. Therefore, the DSP56009 has a special instruction (MAC) that multiplies two values and adds the result to the contents of an accumulator. This program is provided as example.asm on the DSP56009EVM demos diskette and is placed in the EVM56007 directory by the installation procedure.
MOTOROLA DSP56009EVMUM 6-5

Example Test Program
Writing the Program
Example 6-1 Simple DSP56009 Code Example
;*************************************************************;A SIMPLE PROGRAM: CALCULATING THE SUM OF PRODUCTS;*************************************************************PBASE EQU $100 ;instruct the assembler to replace
;every occurrence of PBASE with $200XBASE EQU $0 ;used to define the position of the
;data in X memoryYBASE EQU $0 ;used to define the position of the
;data in Y memory;*************************************************************;X MEMORY;*************************************************************
org x:XBASE ;instructs the assembler that we;are referring to X memory starting ;at location XBASE
list1 dc $475638,$738301,$92673a,$898978,$091271,$f25067dc $987153,$3A8761,$987237,$34b852,$734623,$233763dc $f76756,$423423,$324732,$f40029
;*************************************************************;Y MEMORY;*************************************************************
org y:YBASE ;instructs the assembler that we;are referring to Y memory starting ;at location YBASE
list2 dc $f98734,$800000,$fedcba,$487327,$957572,$369856dc $247978,$8a3407,$734546,$344787,$938482,$304f82dc $123456,$657784,$567123,$675634
;*************************************************************;PROGRAM;*************************************************************
org p:0 ;put following program in program;memory starting at location 0
jmp begin ;p:0 is the reset vector i.e. where;the DSP looks for instructions;after a reset
org p:PBASE ;start the main program at p:PBASE
beginmove #list1,r0 ;set up pointer to start of list1move #list2,r4 ;set up pointer to start of list2clr a ;clear accumulator amove x:(r0)+,x0 y:(r4)+,y0
;load the value of X memory pointed;to by the contents of r0 into x0 and;post-increment r0;load the value of Y memory pointed;to by the contents of r4 into y0 and;post-increment r4
6-6 DSP56009EVMUM MOTOROLA

Example Test Program
Assembling the Program
6.3 ASSEMBLING THE PROGRAM
The following sections describe the format of the Assembler command, give a list of Assembler special characters and directives, and give instructions to assemble the example program.
6.3.1 Assembler Command Format
The Motorola DSP Assembler is included with the DSP56009EVM on the Motorola 3-1/2 inch diskette and can be installed by following the instructions in Section 1.4.3. The Motorola DSP Assembler is a program that translates assembly language source statements into object programs compatible with the DSP56009. The general format of the command line to invoke the Assembler is:
asm56000[options] <filenames>
where asm56000 is the name of the Motorola DSP Assembler program, and <filenames> is a list of the assembly language programs to be assembled. The following section describes the Assembler options. To avoid ambiguity, the option arguments should immediately follow the option letter with no blanks between them.
do #15,endloop;do 15 timesmac x0,y0,a x:(r0)+,x0 y:(r4)+,y0
;multiply and accumulate, and load ;next values
endloop jmp * ;this is equivalent to;label jmp label;and is therefore a never-ending,;empty loop
;*************************************************************;END OF THE SIMPLE PROGRAM;*************************************************************
Example 6-1 Simple DSP56009 Code Example (Continued)
MOTOROLA DSP56009EVMUM 6-7

Example Test Program
Assembling the Program
6.3.2 Assembler Options
-A
This option indicates that the Assembler should run in Absolute mode, generating an absolute object file when the -B command line option is given. By default, the Assembler produces a relocatable object file that is subsequently processed by the Motorola DSP Linker.
-B<objfil>
This option specifies that an object file is to be created for Assembler output. <objfil> can be any legal operating system filename, including an optional pathname. The type of object file produced depends on the Assembler operation mode. If the -A option is supplied on the command line, the Assembler operates in Absolute mode and generates an absolute object (.cld) file. If there is no -A option on the command line, the Assembler operates in Relative mode and creates a relocatable object (.cln) file. If the -B option is not specified, the Assembler will not generate an object file. If no <objfil> is specified, the Assembler will use the basename (filename without extension) of the first filename encountered in the source input file list and append the appropriate file type (.cln or.cld) to the basename. The -B option should be specified only once.
Example: asm56000 -Bfilter main.asm fft.asm fio.asm
This example assembles the files main.asm, fft.asm, and fio.asm together to produce the relocatable object file filter.cln.
-D <symbol> <string>
This option replaces all occurrences of <symbol> with <string> in the source files to be assembled.
Example: asm56000 -DPOINTS 16 prog.asm
This example replaces all occurrences of the symbol POINTS in the program prog.asm by the string ‘16’.
-EA<errfil> or -EW<errfil>
These options allow the standard error output file to be reassigned on hosts that do not support error output redirection from the command line. <errfil> must be present as an argument, but can be any legal operating system filename, including an
6-8 DSP56009EVMUM MOTOROLA

Example Test Program
Assembling the Program
optional pathname. The -EA option causes the standard error stream to be written to <errfil>; if <errfil> exists, the output stream is appended to the end of the file. The -EW option also writes the standard error stream to <errfil>; if <errfil> exists, it will be overwritten.
Example: asm56000 -EWerrors prog.asm
This example redirects the standard output to the file errors. If the file already exists, it will be overwritten.
-F<argfil>
This option indicates that the Assembler should read command line input from <argfil>. <argfil> can be any legal operation system filename, including an optional pathname. <argfil> is a text file containing further options, arguments, and filenames to be passed to the Assembler. The arguments in the file need to be separated only by some form of white space. A semicolon on a line following white space makes the rest of the line a comment.
Example: asm56000 -Fopts.cmd
This example invokes the Assembler and takes the command line options and source filenames from the command file opts.cmd.
-G
This option sends the source file line number information to the object file. This option is valid only in conjunction with the -B command line option. The generated line number information can be used by debuggers to provide source-level debugging.
Example: asm56000 -B -Gmyprog.asm
This example assembles the file myprog.asm and sends the source file line number information to the resulting object file myprog.cln.
-I<pathname>
This option causes the Assembler to look in the directory defined by <pathname> for any include file not found in the current directory. <pathname> can be any legal operating system pathname.
Example: asm56000 -I\project\ testprog
MOTOROLA DSP56009EVMUM 6-9

Example Test Program
Assembling the Program
This example uses IBM PC pathname conventions, and would cause the Assembler to prefix any include files not found in the current directory with the \project\ pathname.
-L<lstfil>
This option specifies that a listing file is to be created for Assembler output. <lstfil> can be any legal operating system filename, including an optional pathname. If no <lstfil> is specified, the Assembler will use the basename (filename without extension) of the first filename encountered in the source input file list and append .lst to the basename. The -L option should be specified only once.
Example: asm56000 -L filter.asm gauss.asm
This example assembles the files filter.asm and gauss.ams together to produce a listing file. Because no filename was given, the output file will be named using the basename of the first source file, in this case filter, and the listing file will be called filter.lst.
-M<pathname>
This option causes the Assembler to look in the directory defined by <pathname> for any macro file not found in the current directory. <pathname> can be any legal operating system pathname.
Example: asm56000 -Mfftlib\ trans.asm
This example uses IBM PC pathname conventions, and would cause the Assembler to look in the fftlib subdirectory of the current directory for a file with the name of the currently invoked marco found in the source file, trans.asm.
-V
This option causes the Assembler to report assembly progress to the standard error output stream.
-Z
This option causes the Assembler to strip symbol information from the absolute load file. Normally symbol information is retained in the object file for symbolic references purposes. This option is only valid with the -A and -B options.
Note: Multiple options can be used. A typical string might be:
Example: asm56000 -A -B -L -G filename.asm
6-10 DSP56009EVMUM MOTOROLA

Example Test Program
Assembling the Program
6.3.3 Assembler Directives
In addition to the DSP56009 instruction set, the assembly programs can contain mnemonic directives that specify auxiliary actions to be performed by the Assembler. These are the Assembler directives. These directives are not always translated into machine language. The following sections briefly describe the various types of Assembler directives.
6.3.3.1 Assembler Significant CharactersThere are several one and two character sequences that are significant to the Assembler. The Assembler significant characters are:
; - Comment delimiter
;; - Unreported comment delimiter
\ - Line continuation character or macro dummy argument concatenation operator
? - Macro value substitution operator
% - Macro hex value substitution operator
^ - Macro local label override operator
“ - Macro string delimiter or quoted string DEFINE expansion character
@ - Function delimiter
* - Location counter substitution
++ - String concatenation operator
[] - Substring delimiter
<< - I/O short addressing mode force operator
< - Short addressing mode force operator
> - Long addressing mode force operator
# - Immediate addressing mode operator
#< - Immediate short addressing mode force operator
#> - Immediate long addressing mode force operator
MOTOROLA DSP56009EVMUM 6-11

Example Test Program
Assembling the Program
6.3.3.2 Assembly ControlThe directives used for assembly control are:
COMMENT - Start comment lines
DEFINE - Define substitution string
END - End of source program
FAIL - Programmer generated error message
FORCE - Set operand forcing mode
HIMEM - Set high memory bounds
INCLUDE - Include secondary file
LOMEM - Set low memory bounds
MODE - Change relocation mode
MSG - Programmer generated message
ORG - Initialize memory space and location counters
RADIX - Change input radix for constants
RDIRECT - Remove directive or mnemonic from table
SCSJMP - Set structured control branching mode
SCSREG - Reassign structured control statement registers
UNDEF - Undefine DEFINE symbol
WARN - Programmer generated warning
6-12 DSP56009EVMUM MOTOROLA

Example Test Program
Assembling the Program
6.3.3.3 Symbol DefinitionThe directives used to control symbol definition are:
ENDSEC - End section
EQU - Equate symbol to a value
GLOBAL - Global section symbol declaration
GSET - Set global symbol to a value
LOCAL - Local section symbol declaration
SECTION - Start section
SET - Set symbol to a value
XDEF - External section symbol definition
XREF - External section symbol reference
6.3.3.4 Data Definition/Storage AllocationThe directives used to control constant data definition and storage allocation are:
BADDR - Set buffer address
BSB - Block storage bit-reverse
BSC - Block storage of constant
BSM - Block storage modulo
BUFFER - Start buffer
DC - Define constant
DCB - Define constant byte
DS - Define storage
DSM - Define modulo storage
DSR - Define reverse carry storage
ENDBUF - End buffer
MOTOROLA DSP56009EVMUM 6-13

Example Test Program
Assembling the Program
6.3.3.5 Listing Control and OptionsThe directives used to control the output listing are:
LIST - List the assembly
LSTCOL - Set listing field widths
NOLIST - Stop assembly listing
OPT - Assembler options
PAGE - Top of page/size page
PRCTL - Send control string to printer
STITLE - Initialize program subtitle
TABS - Set listing tab stops
TITLE - Initialize program title
6.3.3.6 Object File ControlThe directives used for control of the object file are:
COBJ - Comment object code
IDENT - Object code identification record
SYMOBJ - Write symbol information to object file
6-14 DSP56009EVMUM MOTOROLA

Example Test Program
Assembling the Program
6.3.3.7 Macros and Conditional AssemblyThe directives used for macros and conditional assembly are:
DUP - Duplicate sequence of source lines
DUPA - Duplicate sequence with arguments
DUPC - Duplicate sequence with characters
DUPF - Duplicate sequence in loop
ENDIF - End of conditional assembly
ENDM - End of macro definition
EXITM - Exit macro
IF - Conditional assembly directive
MACLIB - Macro library
MACRO - Macro definition
PMACRO - Purge macro definition
6.3.3.8 Structured ProgrammingThe directives used for structured programming are:
.BREAK - Exit from structured loop construct
.CONTINUE - Continue next iteration of structured loop
.ELSE - Perform following statements when .IF false
.ENDF - End of .FOR loop
.ENDI - End of .IF condition
.ENDL - End of hardware loop
.ENDW - End of .WHILE loop
.FOR - Begin .FOR loop
.IF - Begin .IF condition
.LOOP - Begin hardware loop
.REPEAT - Begin .REPEAT loop
.UNTIL - End of .REPEAT loop
.WHILE - Begin .WHILE loop
MOTOROLA DSP56009EVMUM 6-15

Example Test Program
Motorola DSP Linker
6.3.4 Assembling the Example Program
The Assembler is a MS-DOS based program, thus to use the Assembler you will need to exit Windows or open a MS-DOS Prompt Window. To assemble the example program, type asm56000 -a -b -l -g example.asm in the evm007 directory created by the installation process from Section 1.4.3. This will create two additional files: example.cld and example.lst. The example.cld file is the absolute object file of the program, and this is what will be downloaded into the DSP56009. The example.lst file is the listing file and gives full details of where the program and data will be placed in the DSP56009 memory.
6.4 MOTOROLA DSP LINKER
Though not needed for our simple example, the Motorola DSP Linker is also discussed here in the DSP56009EVM User’s Manual. The DSP Linker may be obtained through your Motorola sales office or distributor. The Motorola DSP Linker is a program that processes relocatable object files produced by the Motorola DSP Assembler, generating an absolute executable file that can be downloaded to the DSP56009. The general format of the command line to invoke the Linker is:
dsplnk [options] <filenames>
where dsplnk is the name of the Motorola DSP Linker program, and <filenames> is a list of the relocatable object files to be linked. The following section describes the Linker options. To avoid ambiguity, the option arguments should immediately follow the option letter with no blanks between them.
6-16 DSP56009EVMUM MOTOROLA

Example Test Program
Motorola DSP Linker
6.4.1 Linker Options
-A
This option auto-aligns circular buffers. Any modulo or reverse-carry buffers defined in the object file input sections are relocated independently in order to optimize placement in memory. Code and data surrounding the buffer are packed to fill the space formerly occupied by the buffer and any corresponding alignment gaps.
Example: dsplnk -A myprog.cln
This example links the file myprog.cln and optimally aligns any buffers encountered in the input.
-B<objfil>
This option specifies that an object file is to be created for Linker output. <objfil> can be any legal operating system filename, including an optional pathname. If no filename is specified, or if the -B option is not present, the Linker will use the basename (filename without extension) of the first filename encountered in the input file list and append .cld to the basename. If the -I option is present (see below), an explicit filename must be given. This is because if the Linker followed the default action, it possibly could overwrite one of the existing input files. The -B option should be specified only once. If the file named in the -B option already exists, it will be overwritten.
Example: dsplnk -Bfilter.cld main.cln fft.cln fio.cln
In this example, the files main.cln, fft.cln, and fio.cln are linked together to produce the absolute executable file filter.cld.
-EA<errfil> or -EW<errfil>
These options allow the standard error output file to be reassigned on hosts that do not support error output redirection from the command line. <errfil> must be present as an argument, but can be any legal operating system filename, including an optional pathname. The -EA option causes the standard error stream to be written to <errfil>; if <errfil> exists, the output stream is appended to the end of the file. The -EW option also writes the standard error stream to <errfil>; if <errfil> exists it will be overwritten.
Example: dsplnk -EWerrors myprog.cln
MOTOROLA DSP56009EVMUM 6-17

Example Test Program
Motorola DSP Linker
This example redirects the standard error output to the file errors. If the file already exists, it will be overwritten.
-F<argfil>
This option indicates that the Linker should read command line input from <argfil>. <argfil> can be any legal operating system filename, including an optional pathname. <argfil> is a text file containing further options, arguments, and filenames to be passed to the Linker. The arguments in the file need be separated only by some form of white space. A semicolon on a line following white space makes the rest of the line a comment.
Example: dsplnk -Fopts.cmd
This example invokes the Linker and takes command line options and input filenames from the command file opts.cmd.
-G
This option sends source file line number information to the object file. The generated line number information can be used by debuggers to provide source-level debugging.
Example: dsplnk -B -Gmyprog.cln
This example links the file myprog.cln and sends source file line number information to the resulting object file myprog.cld.
-I
The Linker ordinarily produces an absolute executable file as output. When the -I option is given, the Linker combines the input files into a single relocatable object file suitable for reprocessing by the Linker. No absolute addresses are assigned and no errors are issued for unresolved external references. Note that the -B option must be used when performing incremental linking in order to give an explicit name to the output file. If the filename were allowed to default, it could overwrite an existing input file.
Example: dsplnk -I -Bfilter.cln main.cln fft.cln fio.cln
In this example, the files main.cln, fft.cln, and fio.cln are combined to produce the relocatable object file filter.cln.
6-18 DSP56009EVMUM MOTOROLA

Example Test Program
Motorola DSP Linker
-L<library>
The Linker ordinarily processes a list of input files, which each contain a single relocatable code module. If the -L option is encountered, the Linker treats the following argument as a library file and searches the file for any outstanding unresolved references. If a module is found in the library that resolves an outstanding external reference, the module is read from the library and included in the object file output. The Linker continues to search a library until all external references are resolved or no more references can be satisfied within the current library. The Linker searches a library only once, when it is encountered on the command line. Therefore, the position of the -L option on the command line is significant.
Example: dsplnk -B filter main fir -Lio
This example illustrates linking with a library. The files main.cln and fir.cln are combined with any needed modules in the library io.lib to create the file filter.cld.
-M<mapfil>
This option indicates that a map file is to be created. <mapfil> can be any legal operating system filename, including an optional pathname. If no filename is specified, the Linker will use the basename (filename without extension) of the first filename encountered in the input file list and append .map to the basename. If the -M option is not specified, then the Linker will not generate a map file. The -M option should be specified only once. If the file named in the -M option already exists, it will be overwritten.
Example: dsplnk -M filter.cln gauss.cln
In this example, the files filter.cln and gauss.cln are linked together to produce a map file. Because no filename was given with the -M option, the output file will be named using the basename of the first input file, in this case filter. The map file will be called filter.map.
-N
The Linker considers case significant in symbol names. When the -N option is given the Linker ignores case in symbol names; all symbols are mapped to lower case.
Example: dsplnk -N filter.cln fft.cln fio.cln
MOTOROLA DSP56009EVMUM 6-19

Example Test Program
Motorola DSP Linker
In this example, the files filter.cln, fft.cln, and fio.cln are linked to produce the absolute executable file filetr.cld. All symbol references are mapped to lower case.
-O<mem>[<ctr>][<map>]:<origin>
By default, the Linker generates instructions and data for the output file beginning at absolute location zero for all DSP memory spaces. This option allows the programmer to redefine the start address for any memory space and associated location counter. <mem> is one of the single-character memory space identifiers (X, Y, L, P). The letter may be upper or lower case. The optional <ctr> is a letter indicating the High (H) or Low (L) location counters. If no counter is specified, the default counter is used. <map> is also optional and signifies the desired physical mapping for all relocatable code in the given memory space. It may be I for Internal memory, E for External memory, R for ROM, A for Port A, and B for Port B. If <map> is not supplied, then no explicit mapping is presumed. The <origin> is a hexadecimal number signifying the new relocation address for the given memory space. The -O option may be specified as many times as needed on the command line. This option has no effect if incremental linking is being done (see the -I option).
Example: dsplnk -Ope:200 myprog -Lmylib
This example initializes the default P memory counter to hex 200 and maps the program space to external memory.
-P<pathname>
When the Linker encounters input files, the current directory (or the directory given in the library specification) is first searched for the file. If it is not found and the -P option is specified, the Linker prefixes the filename (and optional pathname) of the file specification with <pathname> and searches the newly formed directory pathname for the file.The pathname must be a legal operating system pathname. The -P option may be repeated as many times as desired.
Example: dsplnk -P\project\ testprog
This example uses IBM PC pathname conventions, and would cause the Linker to prefix any library files not found in the current directory with the \project\ pathname.
-R<ctlfil>
This option indicates that a memory control file is to be read to determine the placement of sections in DSP memory and other Linker control functions. <ctlfil> can
6-20 DSP56009EVMUM MOTOROLA

Example Test Program
Motorola DSP Linker
be any legal operating system filename, including an optional pathname. If a pathname is not specified, an attempt will be made to open the file in the current directory. If no filename is specified, the Linker will use the basename (filename without extension) of the first filename encountered in the link input file list and append .ctl to the basename. If the -R option is not specified, then the Linker will not use a memory control file. The -R option should be specified only once.
Example: dsplnk -Rproj filter.cln gauss.cln
In this example, the files filter.cln and gauss.cln are linked together using the memory file proj.ctl.
-U<symbol>
This option allows the declaration of an unresolved reference from the command line. <symbol> must be specified. This option is useful for creating an undefined external reference in order to force linking entirely from a library.
Example: dsplnk -Ustart -Lproj.lib
This example declares the symbol start undefined so that it will be resolved by code within the library proj.lib.
-V
This option causes the Linker to report linking progress (beginning of passes, opening and closing of input files) to the standard error output stream. This is useful to insure that link editing is proceeding normally.
Example: dsplnk -V myprog.cln
This example links the file myprog.cln and sends progress lines to the standard error output.
MOTOROLA DSP56009EVMUM 6-21

Example Test Program
Motorola DSP Linker
-X<opt>[,<opt>,...,<opt>]
The -X option provides for link time options that alter the standard operation of the Linker. The options are described below (* means default). All options may be preceded by NO to reverse their meaning. The -X<opt> sequence can be repeated for as many options as desired.
Option Meaning
ABC* Perform address bounds checking
AEC* Check form of address expressions
ASC Enable absolute section bounds checking
CSL Cumulate section length data
ESO Do not allocate memory below ordered sections
OVLP Warn on section overlap
RO Allow region overlap
RSC* Enable relative section bounds checking
SVO Preserve object file on errors
WEX Add warning count to exit status
Example: dsplnk -XWEX filter.cln fft.cln fio.cln
This example allows the Linker to add the warning count to the exit status so that a project build will abort on warnings as well as errors.
-Z
This option allows the Linker to strip source file line number and symbol information from the output file. Symbol information normally is retained for debugging purposes. This option has no effect if incremental linking is being done (see the -I option).
Example: dsplnk -Zfilter.cln fft.cln fio.cln
In this example, the files filter.cln, fft.cln, and fio.cln are linked to produce the absolute object file filter.cln. The output file will contain no symbol or line number information.
6-22 DSP56009EVMUM MOTOROLA

Example Test Program
Motorola DSP Linker
6.4.2 Linker Directives
Similar to the Assembler directives, the Linker includes mnemonic directives that specify auxiliary actions to be performed by the Linker. The following sections briefly describe the Linker directives.
BALIGN -Auto-align circular buffers
BASE - Set region base address
IDENT - Object module identification
INCLUDE - Include directive file
MAP - Map file format control
MEMORY - Set region high memory address
REGION - Establish memory region
RESERVE - Reserve memory block
SBALIGN - Auto-align section buffers
SECSIZE - Pad section length
SECTION - Set section base address
SET - Set symbol value
SIZSYM - Set size symbol
START - Establish start address
SYMBOL - Set symbol value
MOTOROLA DSP56009EVMUM 6-23

Example Test Program
Introduction to the Debugger Software
6.5 INTRODUCTION TO THE DEBUGGER SOFTWARE
This section will give a brief introduction of the Domain Technologies Debugger, detailing only that which is required to work through this example. Full details of the Debugger and an informative tutorial can be found in the Debug-56K Manual. The Domain Technologies Debugger is a software development system for the DSP56009. The Domain Technologies Debugger is included with the DSP56009EVM on the Domain Technologies 3-1/2 inch diskette and can be installed by following the instructions in Section 1.4.3. To invoke the Debugger, double-click on the icon labelled EVM56007 Debugger in the EVM56007 program group that was created when the Debugger was installed.
The Debugger display will be similar to Figure 6-2, with the screen divided into four windows: the command window, the data window, the unassembly window, and the registers window (DSP56303EVM Debugger shown). The command window is the window selected, which means that key strokes will be placed in the command window. The command window is where commands are entered. The data window is used to display DSP56009 data. The unassembly window is used to display the DSP56009 programs. The next instruction to be executed will be highlighted. The registers window shows the contents of the DSP56009 internal registers.
6-24 DSP56009EVMUM MOTOROLA

Example Test Program
Introduction to the Debugger Software
When the command window is selected as in Figure 6-2, the tool-bar at the top of the screen contains buttons for the most often used commands. From right to left the commands are: go, stop, step, jump, automatic update, reset and radix. The go button runs the DSP56009 from the program counter. The stop button stops the DSP56009. The step button executes a single instruction. The jump button is similar to the step button, except that subroutines are treated as one instruction. The automatic update button turns the automatic screen update mode on, so that the DSP56009 is interrupted periodically to update the data and registers windows. The reset button resets the DSP56009. The radix button can be used to change the radix of the selected window. Other buttons will appear when other windows are selected, and the function of these buttons can be found in the Debug-56K Manual.
Figure 6-2 Example Debugger Window Display
MOTOROLA DSP56009EVMUM 6-25

Example Test Program
Running the Program
6.6 RUNNING THE PROGRAM
To load the example program developed above into the Debugger, click in the command window and type load example. The instruction at line 33 will be highlighted in the unassembly window, as this will be the first instruction to be executed. However, before we start to execute the program, we should check that the values we expect to be in data memory are there. To do this, type display x:0 and display y:0. The data will be displayed in the data window.
To step through the program, type step at the command window prompt. As a shortcut, you can click on the step button or you can type the start of the command and press the space bar, and the debugger will complete the remainder of the command. To repeat the last command, simply press return. As you step through the code, you will see the registers in the registers window being changed by the instructions. After each cycle, any register that has been changed will be brightened. Once you have stepped through the program, ensure that the program has executed correctly by checking that the result in accumulator a is: $FE 9F2051 6DFCC2.
Stepping through the program like this is good for short programs, but it is impractical for large complex programs. The way to debug large programs is to set breakpoints. These are user-defined points at which execution of the code will stop, allowing the user to step through the section of interest. To set a breakpoint in the example to check that the values in r0 and r4 are correct before the do loop, type break p:$106 in the command window. You will see the line before the loop brighten in the unassembly window, indicating the breakpoint has been set. To point the DSP56009 back to the start point of the program, type change pc 0. This changes the program counter such that it is pointing to the reset vector. To start the program running type go or click on the go button. The DSP56009 will stop when it reaches the breakpoint, and you will be able to step through the remainder of the code.
To exit the Debugger, type quit at the command prompt.
6-26 DSP56009EVMUM MOTOROLA

APPENDIX A
AUDIO PASS-THROUGH EXAMPLE
MOTOROLA DSP56009EVMUM A-1

Audio Pass-Through Example
A.1 PASS-THROUGH THEORY . . . . . . . . . . . . . . . . . . . . . . . . . A-3A.2 SPDIF INPUT PASS-THROUGH THEORY . . . . . . . . . . . . . A-4A.3 EVM SETUP FOR AUDIO PASS-THROUGH. . . . . . . . . . . . A-5
A-2 DSP56009EVMUM MOTOROLA

Audio Pass-Through Example
Pass-Through Theory
A.1 PASS-THROUGH THEORY
The main program loop of the passthru.asm code serves as a reference guide onhow to pass data into and out of the EVM.
The following describes the operation of the passthru.asm program.
Audio samples are composed of left and right data words that are received and trans-mitted alternately. The RX_HERE bit is polled until it is set, indicating that a the leftdata word is shifted in on the associated serial receive data pin (SDI0 or SDI1) andtransferred to the receive data register (RX0, RX1, or RX2). This bit is cleared after theword is received.
The left receive interrupt service routine moves the word in the receive data registerinto the receive buffer LEFT_AUDIN. The received word is also saved into anotherregister such as X1. The user's code may be inserted in this section to perform anynecessary audio processing.
The word to be transmitted out, stored in X1 is then moved into the LEFT_AUDOUTtransmit buffer. The left transmit interrupt service routine moves the word in thetransmit buffer into the transmit data register (TX0, TX1, or TX2) and it is shifted outon the associated serial transmit data pin (SDO0, SDO1, or SDO2).
The right data is received and transmitted similarly. After the right word is received,the RX_HERE bit is set in the right receive interrupt routine to indicate that the nextdata to be received (left data) is a new sample.
The program loops back to the beginning of the main code to receive the next sample.
The illustration shown in Figure A-1 is the interrupt sequence for analog audio input.
MOTOROLA DSP56009EVMUM A-3

Audio Pass-Through Example
SPDIF Input Pass-Through Theory
SAI_LFT_TX_IRQ MOVEP X:LEFT_AUDOUT,X:TX0 MOVEP X:LEFT_AUDOUT,X:TX1 MOVEP X:LEFT_AUDOUT,X:TX2 ;movep x:left_digout,x:tx0 ;movep x:left_digout,x:tx1 ;movep x:left_digout,x:tx2
RTI;SAI_RGT_TX_IRQ MOVEP X:RIGHT_AUDOUT,X:TX0 MOVEP X:RIGHT_AUDOUT,X:TX1 MOVEP X:RIGHT_AUDOUT,X:TX2 ;movep x:right_digout,x:tx0 ;movep x:right_digout,x:tx1 ;movep x:right_digout,x:tx2
RTI
Figure A-1 Output Interrupt Structure for Analog Input
A.2 SPDIF INPUT PASS-THROUGH THEORY
In order to perform the pass-through example with the S/PDIF input instead of theanalog inputs, a few changes must be made to the file, passthru.asm. The structurealready supports digital input buffers, therefore the only change necessary to enabledigital audio input is in the interrupt routines, as shown below in Figure A-2.
SAI_LFT_TX_IRQ ;MOVEP X:LEFT_AUDOUT,X:TX0 ;MOVEP X:LEFT_AUDOUT,X:TX1 ;MOVEP X:LEFT_AUDOUT,X:TX2 movep x:left_digout,x:tx0 movep x:left_digout,x:tx1 movep x:left_digout,x:tx2
RTI;SAI_RGT_TX_IRQ ;MOVEP X:RIGHT_AUDOUT,X:TX0 ;MOVEP X:RIGHT_AUDOUT,X:TX1 ;MOVEP X:RIGHT_AUDOUT,X:TX2 movep x:right_digout,x:tx0 movep x:right_digout,x:tx1 movep x:right_digout,x:tx2
RTI
Figure A-2 Output Interrupt Structure for Digital Input
A-4 DSP56009EVMUM MOTOROLA

Audio Pass-Through Example
EVM Setup for Audio Pass-Through
A.3 EVM SETUP FOR AUDIO PASS-THROUGH
The input sources for the respective output channels for the demo, passthru.cld,are illustrated below in Table A-1. The output channels are specified in the outputinterrupt routines, SAI_LFT_TX_IRQ and SAI_RGT_TX_IRQ.
The audio pass-through EVM jumper configuration is illustrated below in Figure A-3.Note that JP5 is configured to clock from the DSP clock and receive analog input data.Therefore, in order to receive the SPDIF input clock and data the jumper on JP5.3 andJP5.4 must be removed. Also, note that JP4 is set for non-Optical input.
Table A-1 Output sources for audio pass-through
Audio Source EVM output
Analog Inputs Left 1Right 1
Analog Inputs Left 2Right 2
Digital Inputs Left 3Right 3
MOTOROLA DSP56009EVMUM A-5

Audio Pass-Through Example
EVM Setup for Audio Pass-Through
Figure A-3 DSP56009EVM Pass-through Setup
68HC711E9
LCD Display
SC937-02
RS-232
OnCETM
Reset
CS5390
PLD
DSP 56009
68HC705K1
CS4331CS3310 CS3310 CS4331 CS3310 CS4331
STK10C68
CS8412
CS8402A
AnalogPower
30-PinSIMMSocket
JP7
JP4
JP2
JP5
JP3
J9
J18
JP1
JP6
J2
J3
DigitalPower
SPDIFIn
SPDIFOut
Right In Left In
Analog Outputs
Right 3 Right 2Left 2 Left 1 Right 1Left 3
Analog Inputs
J5
JP9
InfraredRemoteReceiver
In
OpticalOut
Optical
J1
LS RS C Sub L R
A-6 DSP56009EVMUM MOTOROLA

APPENDIX B
SOUND FIELD PROCESSING EXAMPLE
MOTOROLA DSP56009EVMUM B-1

Sound Field Processing Example
B.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-3B.2 EARLY REFLECTIONS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-3B.3 DELAY LINE FOR COMBS/REVERBERATION . . . . . . . . . . B-6B.4 COMB FILTER. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-7B.5 ALL-PASS FILTER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-8B.6 DE-CORRELATION ROUTINE . . . . . . . . . . . . . . . . . . . . . . . B-9B.7 DSP56009EVM SETUP FOR SFP DEMONSTRATION . . . B-11B.8 BLOCK DIAGRAM OF THE SOUND FIELD PROCESSOR B-13B.9 X/Y MEMORY MAP FOR SOUND FIELD PROCESSOR . . B-15B.10 REVERB TIME ANALYSIS . . . . . . . . . . . . . . . . . . . . . . . . . B-17
B-2 DSP56009EVMUM MOTOROLA

Sound Field Processing Example
Introduction
B.1 INTRODUCTION
The phrase “sound field processing” seems to embody a sense of extra space added toan original sound. With the advent of practical multichannel sound, processing certainsound fields artificially became attainable and edifies the listening environment whencertain theaters or other settings are replicated in software. In order to create the delayand reverberation elements that typify certain acoustical spaces, filtering and delaycomponents must be instituted. Therefore, DSPs ideally might handle even thetoughest simulation.
The soundfield processing example offered here is a design based around studiesperformed independently by Manfred Schroeder and James Moorer1. Each provideimportant insight into effective algorithms that create artificial reverberation. Thisappendix will explain specifically the reverberation blocks inherent in one particularexample; however, this example provides only one of many as defined by Schroederand Moorer. This implementation uses filter coefficients collected by Schroeder thatimitate the Boston Concert Hall. A four channel output is generated: left front, rightfront, left rear, and right rear; with a summed output feeding the center channel whichmay also be lowpass filtered to be used for a subwoofer channel. The complete blockdiagram of the system is shown in Figure B-8.
The software to implement this design is provided on the DSP56009 diskette for view-ing/editing as SFPEVM09.ASM and for downloading onto the EVM asSFPEVM09.CLD.The SFPEVM09.ASM may be operated with either a DSP56004,DSP56007, or DSP56009.
The basic reverberation elements utilized in the file, SFPEVM09.ASM, include an earlyreflection FIR filter for each of the four main channels and a reverberation unitcomprised of six parallel comb filters and a single all-pass filter.
This code as written can be implemented on the DSP56009EVM.
B.2 EARLY REFLECTIONS
Schroeder suggested a method for simulating early wall reflections and roomgeometry by combining the direct summation of the original signal with a standardunit reverberator to recreate late echos. The theory proposes that the first gains anddelays simulate the room’s geometry patterned after an FIR (non-recursive) filterstructure; and the unit reverberator/IIR (recursive) filter imitates the decay of thereverberation once the pulses become inseparable.
1. Moore, James. “About this Reverberation Business.” Computer Music Journal, Vol 3, #2.
MOTOROLA DSP56009EVMUM B-3

Sound Field Processing Example
Early Reflections
Implemented in software, the algorithm takes advantage of the SAI (Serial AudioInterface) and the EMI (External Memory Interface), two of the peripherals onMotorola’s Symphony™ line of DSPs. The input samples are received by the SAI asleft and right channel data stored in memory. These samples are delayed severalmilliseconds and retrieved according to the early reflection offset tableER_off_buf. ER_off_buf is constructed as a seven-tap FIR section (SeeFigure B-1). Table B-1 below illustrates the respective tap and its associated timedelay and gain as patterned after the Boston Concert Hall.
Twelve samples are read from the delay line(two channels, left and right, multipliedby the offset table which is six deep) and four FIR filters are calculated. Reading ofthe delayed samples is triggered by writing offset values to the EMI’s EOR0 andEOR1 registers (as defined by the values in ER_DAx). The FIR filter creates the earlyreflection defining the room size and reflective characteristics of the roomenvironment.
The FIR filter is implemented within a DO loop (instructions 33-70) in which theoffset information is retrieved by a post incrementing pointer, r4, and the left andright data samples are read via the EDR registers. The DO loop is shown inFigure B-1 below.
1 clr a #ER_off_buf,r4 ;clr acc, offset start2 ;address in r4.3 !loop reduce4 clr b #ER_gains, r1 ;clr acc, gains start5 ;address in r1.6 !loop reduce7 move m7,m1 ;set linear8 move #front,r5 ;pointer r5 for samples9 movep x:(ER_ebar),x:EBAR0 ;FIR left delay line10 movep y:(ER_ebar),x:EBAR1 ;FIR right delay line11 move l:(r4)+,x ;get 1’st stage left and 12 ;right offsets
Table B-1 Early Reflection FIR Structure
Tap Time Delay Gain
0 0 1.00
1 0.0199 1.02
2 0.0354 0.818
3 0.0389 0.635
4 0.0414 0.719
5 0.0699 0.267
6 0.0796 0.242
B-4 DSP56009EVMUM MOTOROLA

Sound Field Processing Example
Early Reflections
13 movep x1,x:EOR0 ;1st stage trigger of left14 movep x0,x:EOR1 ;1st stage trigger of right
•••
33 do #(nFIR-1),end_FIR ; EMI reading34 35 move l:(r4)+,x ; get next stage l & r offsets 3637 movep x1,x:EOR0 ; next left trigger38 movep x:EDR0,x1 ; get left sample39 movep x0,x:EOR1 ; next right trigger40 movep x:EDR1,y1 ; get right sample41 ; front4243 mac x1,y0,a x:(r1)+,x0 b,y:(r5)- ;left from left,44 ;get left front right gain,45 ; store right rear46 macr x0,y1,a x:(r1),x0 y:(r5),b ; left from right,47 ; get right front 48 ; right gain,49 ; get right front50 mac x0,y1,b a,x:(r5)+ y:(r1)+,y0;right from right,51 ;get right front left gain,52 ; store left front53 macr x1,y0,b x:(r5)-,a y:(r1),y0 ;right from left, 54 ;get left rear left gain,55 ; get left rear56 ; rear5758 mac x1,y0,a x:(r1)+,x0 b,y:(r5)+ ;left from left,59 ;get left rear right gain,60 ; store right front61 macr x0,y1,a x:(r1),x0 y:(r5),b ;left from right,62 ;get right rear right gain,63 ; get right rear64 mac x0,y1,b a,x:(r5)- y:(r1)+,y0;right from right,65 ;get right rear left gain,66 ; store left rear67 macr x1,y0,b x:(r5)+,a y:(r1),y0 ;right from left, 68 ;get left front left gain,69 ; get left front70 end_FIR71 ; complete the loop72 move l:(in_in),x ; get l & r delay line samples7374 movep x1,x:EDR0 ; store l_in (base incremented)75 movep x:EDR0,x1 ; get last left sample76 movep x0,x:EDR1 ; store r_in (base incremented)77 movep x:EDR1,y1 ; get last r sample
Figure B-1 Early Reflection DO loop
MOTOROLA DSP56009EVMUM B-5

Sound Field Processing Example
Delay Line for Combs/Reverberation
The early reflection part is constructed such that the first EMI write transfer triggersare performed in lines 13-14 before the DO loop; therefore, the first delayed EMIread can occur after the first offsets are retrieved from X and Y memory in line 35within the DO loop. Following the beginning of the DO loop, a trigger occurs (lines 37and 39). In the next iteration of the DO loop the corresponding read occurs (lines 38and 40). Therefore, the final EMI reads transpire at the termination of the loop inlines 75 and 77 and the final left and right delay line samples are stored in Xmemory (line 72).
Each time the loop executes, the left and right samples are multiplied by theircorresponding gains from ER_gains in pointer r1 (lines 43, 46) and routed to thecorresponding output. For instance, the comment in line 43, “; left from left”signifies that the left FIR multiply is routed to the left output. The comment in line46, “; left from right” likewise denotes that the right FIR multiply is routed to theleft output. This structure can be explicitly seen in Figure B-8 on page -14. Thepointer, r5, contains the input samples for the early reflections and the pointer, r4,contains the delay values for the FIR as stated previously.
The block diagram of the early reflection is illustrated in Figure B-2.
Figure B-2 Early Reflection FIR Block (one channel)
B.3 DELAY LINE FOR COMBS/REVERBERATION
This portion of the code acts as the gathering point for the results of the four early re-flection FIR blocks for the left front, right front, left rear, and right rear, respectively.The saved values from each of these processes are summed with averaging weightsand stored in a delay line for use in the following comb filter and all-pass filter blocks,
∑
x(n)
y(n)
19.9ms 15.5ms 3.5ms 2.5ms 28.5ms 9.7ms
19.9ms 35.4ms 38.9ms 41.4ms 69.9ms 79.6ms
1.0 1.01 .817 .634 .718 .266 .241ER_gains
B-6 DSP56009EVMUM MOTOROLA

Sound Field Processing Example
Comb Filter
which generate the diffuse reverberation. The timing of the delay is designed to syn-chronize the inputs to the comb filter section. The summed value is routed to thecenter channel.
B.4 COMB FILTER
Following the early reflections, there follows a section of six parallel comb filters thatcreate diffuse field reverberation. Recursive comb filters provide delay and incorpo-rate feedback, which generate a “toothed” frequency response. Moorer determinedthat the gain, g, should be a function of the reverberation time according to theformula:
g = 1 - 0.366/T where T=reverberation time (A.1)
The values of the optimal gain in the feedback loop, g1, are determined by the roomhumidity versus distance from the source and the sample rate of the system. FromMoorer’s diagrams, the coefficients for a 44.1 kHz sample rate can be discerned.Larger values of g1 will produce bright reverberation at the onset followed by amuffled decay. The loopback gain, g2, can be determined by the equation
g2 = g(1-g1) (A.2)
The total reverberation time for SFPEVM09.ASM is designed for two seconds. There-fore, using (A.1), the overall gain, g, is 0.83. The values of g1 for the seven-tap combfilter model are shown in Table B-2 below.
The block diagram of one of the six comb filter structures is shown in Figure B-3
Table B-2 Comb filter loop-back gains
Comb # Delay (in ms) g1
Comb 1 50 0.45
Comb 2 56 0.47
Comb 3 61 0.49
Comb 4 68 0.51
Comb 5 72 0.52
Comb 6 78 0.54
MOTOROLA DSP56009EVMUM B-7

Sound Field Processing Example
All-Pass Filter
below.
Figure B-3 Comb Filter (one of six)
The output of each of the six comb filters is summed and routed to the all-pass filterportion of the program.
B.5 ALL-PASS FILTER
The all-pass filter has a flat frequency response from 0 Hz to the Nyquist frequency;however, the phase response delays different frequencies by different amounts. Thisprovides a very distinct sound approaching a phasing effect. Moorer defines the mostnatural sounding unit reverberator to contain a number of comb filters and a singleall-pass filter. He also states that the use of more than six parallel comb filters and oneall-pass filter does not significantly enhance reverberant qualities. Therefore, only asingle all-pass filter is implemented here. The delay must be set to six milliseconds orless, as longer delays produce what Moorer describes as an audible repetition. Thegain, constant g, of the all-pass filter is 0.7.
The block diagram for the all-pass filter is shown in Figure B-4.
Figure B-4 All-pass Filter
∑ z -m
∑
z -1
g1g2
x(n) y(n)
∑ ∑ z -mx(n) v(n)
-g1
g1
1-g12y(n) y(n-T)
z(n)
B-8 DSP56009EVMUM MOTOROLA

Sound Field Processing Example
De-Correlation Routine
The value z(n), which is the value of the upper gain stage, is computed first, thedelay z-m is accessed from the EDR0 (EMI Data Read register), and v(n) iscomputed. The parallel move feature of Motorola’s DSP56K architecture allows thisarithmetic to be achieved in only four instructions, as shown in Figure B-5.
1 move b,y0 x:(r6)+,x1 ; transfer x(n) to y0 for2 ; multiplication get 1-k**2 at x13 mpy -y0,y1,a x:(r0),x0 ; z(n)=-k*x(n),4 ; get y(n-T) from EDR0 to x05 macr x0,y1,b (r4)- ; compute y(n)= x(n)+k*y(n-T)6 ; pointer goes to APF end7 macr x0,x1,a b,x:(r0) ; compute v(n)=z(n)+(1-k**2)
; *y(n-T),8 ; store y(n)
Figure B-5 All-Pass Filter Routine
In the above example, r6, points to the COMB_gains, r0 points to the EMI data readregister EDR0, and r4 points to EEcomb, which is the base addresses of the delays.The final instructions in the routine store the all-pass output v(n) and the base address(EBAR0) of the latest sample to be passed to the decorrelator and rear delay lines, asshown in Figure B-6 below. A description of the de-correlator and delay line areprovided in B.6 De-Correlation Routine on page B-9.
The all-pass portion may be set to loop to allow for more multiple filter designs.However, James Moorer states that this produces only a negligible increase in rever-berant quality.
B.6 DE-CORRELATION ROUTINE
The data stream output from the main reverb routine is combined with each of theseparate early reflection values to provide the four discrete outputs: left front, rightfront, left rear, and right rear. This routine takes the output of the first early reflectionvalue and decorrelates the signals from each of the other three channels. The de-cor-relation is performed by using all-pass filters with different coefficients to adjust thephase of each channel independently.
The all-pass filter’s delay base and offset values and the gains are saved using pointersr0 and r4 and then extracted as their manipulation occurs. The instructions:
MOTOROLA DSP56009EVMUM B-9

Sound Field Processing Example
De-Correlation Routine
front_right movep x:(r4),x:EBAR0
movep y:(r4)+,x:EOR0
front_left movep x:(r4),x:EBAR1
movep y:(r4)+,x:EOR1
save the front right and left base and offset values from the tables, EEapf_fr andEEapf_fr and apf_fr_coeffs, respectively. Then the all-pass function is simply imple-mented as in B.5 All-Pass Filter on page B-8, utilizing the corresponding channel’sdelays (affecting phase only in an all-pass filter).
The de-correlation block diagram is shown in Figure B-6.
Figure B-6 De-Correlation Routine
∑ ∑ z-m
-g0
g0
g1
∑ ∑ z-m
-g0
g0
g1
∑
∑
XLF
YOUT
XRF
YOUT
LFREV
RFREV
∑ ∑ z-m
-g0
g0
g1 ∑XRR
YOUT
RRREV
∑ ∑ z-m
-g0
g0
g1 ∑XLR
YOUT
LRREV
z-m
z-m
RndA6g
RndA18g
RndA6g
RndA18g
RndA6g
RndA18g
RndA6g
RndA18g
B-10 DSP56009EVMUM MOTOROLA

Sound Field Processing Example
DSP56009EVM Setup for SFP Demonstration
The gains of the respective gains for the de-correlation all-pass filters are shown inTable B-3 below.
B.7 DSP56009EVM SETUP FOR SFP DEMONSTRATION
The jumper configuration necessary to run the Sound Field Processing demonstrationfor the DSP56009EVM is shown below in Figure B-7. Note that JP5 is configured toclock from the DSP clock and receive analog input data. Therefore, in order to receivethe SPDIF input clock and data the jumper on JP5.3 and JP5.4 must be removed.
Table B-3 De-Correlation All-pass filter gains
Channel g0 g1 (1-g02)
LF 0.65 0.58
RF 0.80 0.36
RR 0.75 0.44
LR 0.60 0.64
MOTOROLA DSP56009EVMUM B-11

Sound Field Processing Example
DSP56009EVM Setup for SFP Demonstration
Figure B-7 EVM configuration for Sound Field Processing Demo
In order to adequately run the SFPEVM09.CLD file, a 256 kbyte 30-pin SIMM DRAMmust also be provided at connector U15. An audio source, an audio amplifier drivingheadphones or speakers, and cables with RCA/phono connectors for five channels arerequired to use the demo software. The SFPEVM09.CLD demo operates with five ofthe six channel outputs shown in Table B-4 below.
Table B-4 Sound Field Processing Audio Outputs
EVM output Demo channel
Left 1Right 1
Front LeftFront Right
68HC711E9
LCD Display
SC937-02
RS-232
OnCETM
Reset
CS5390
PLD
DSP 56009
68HC705K1
CS4331CS3310 CS3310 CS4331 CS3310 CS4331
STK10C68
CS8412
CS8402A
AnalogPower
30-PinSIMMSocket
JP7
JP4
JP2
JP5
JP3
J9
J18
JP1
JP6
J2
J3
DigitalPower
SPDIFIn
SPDIFOut
Right In Left In
Analog Outputs
Right 3 Right 2Left 2 Left 1 Right 1Left 3
Analog Inputs
J5
JP9
InfraredRemoteReceiver
In
OpticalOut
Optical
J1
LS RS C Sub L R
B-12 DSP56009EVMUM MOTOROLA

Sound Field Processing Example
Block Diagram of the Sound Field Processor
In order to operate the sound field processing demonstration, open the Debug-EVMand load the file, SFPEVM09.CLD. Once the object file has downloaded successfully,type GO in the command window or click on the RUN icon. The demonstrationshould now execute.
Macro commands that enable and disable the reverberation routines are providedwith the Sound Field Processing code. The command file, normal.cmd may be inputin the command window of the Domain Debugger as “normal” and the reverberationwill be effectively bypassed. Likewise, the command file, reverb.cmd may be input inthe command window as “reverb” to enable the sound field processor.
B.8 BLOCK DIAGRAM OF THE SOUND FIELD PROCESSOR
The block diagram of the sound field processor utilizing the four aforementionedblocks is shown in Figure B-8.
Left 2Right 2
N/ACenter
Left 3Right 3
Rear LeftRear Right
Table B-4 Sound Field Processing Audio Outputs
MOTOROLA DSP56009EVMUM B-13

B-14 DSP56009EVMUM MOTORO
Sound Field Processing Example
Block Diagram of the Sound Field Processor
∑
∑∑
∑∑
∑∑
∑
∑
∑∑
∑∑
∑∑
∑
∑
∑∑
∑∑
∑∑
∑
∑
∑∑
∑∑
∑∑
∑
L in
_in1
R in
_in1
Left
Rig
ht
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
Cen
ter
Cha
nnel
and/
orS
ubw
oofe
r
∑ ∑
∑Y
OU
T
XLF XR
F
XR
R
XLR
Atte
n.
Atte
n.
L
L
L
L
L
L
L
R
R
R
R
R
R
R
L
L
L
L
L
L
L
R
R
R
R
R
R
R
R
R
R
R
R
R
R
L
L
L
L
L
L
L
L
L
L
L
L
L
L
R
R
R
R
R
R
R
z-m
z-1
z-m
z-1
z-m
z-1
z-m
z-1
z-m
z-1
z-m
z-1
z-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
z-mz-m
T1
EA
RLY
RE
FL
EC
TIO
NC
OM
B F
ILT
ER
AL
L-P
AS
S F
ILT
ER
Fig
ure
B-8
Sou
nd F
ield
Pro
cess
or
LA

Sound Field Processing Example
X/Y Memory Map for Sound Field Processor
T
B.9 X/Y MEMORY MAP FOR SOUND FIELD PROCESSOR
Table B-5 shows the memory map of the X and Y memories of the DSP546009 runningthe SFPEVM09.CLD program.
Table B-5 X and Y Memory Map for Sound Field Processing Demo
Label Address X: Y: Comments
RSRVD5 005b reserved reserved
RSRVD4 005a reserved reserved
RSRVD3 0059 reserved reserved
RSRVD2 0058 reserved reserved
RSRVD1 0057 reserved reserved reserved (also END_TABLE1)
apf_rl_coeffs 0056 APFAgf_RL APFAg_RL
apf_rr_coeffs 0055 APFAgf_RR APFAg_RR
apf_fl_coeffs 0054 APFAgf_FL APFAg_FL
apf_fr_coeffs 0053 APFAgf_FR APFAg_FR output allpass coefficients
EEdelay_rl 0052 DLY_RL_base DLY_RL_OFF
EEdelay_rr 0051 DLY_RR_base DLY_RR_OFF rear output delay lines
EEapf_rl 0050 APF_RL_base APF_RL_OFF
EEapf_rr 004f APF_RR_base APF_RR_OFF
EEapf_fl 004e APF_FL_base APF_FL_OFF
EEapf_fr 004d APF_FR_base APF_FR_OFF allpass output stage delay lines
COMBS_gain 004c tCOMBA_gain tCOMBA_gain total combs gain
RND_gains 004b RNDA6g RNDA18g round gains
APF_gains 004a APFAgf APFAg allpass filter gains
0049 COMB6g2A COMB6g1A
0048 COMB5g2A COMB5g1A
0047 COMB4g2A COMB4g1A
0046 COMB3g2A COMB3g1A
0045 COMB2g2A COMB2g1A
COMB_gains 0044 COMB1g2A COMB1g1A comb gains
0043 ERA_RRavg ERA_RLavg
D_avgs 0042 ERA_FRavg ERA_FLavg delay line averaging gains
0041 ERA_RRrg6 ERA_RR1g6
0040 ERA_RLrg6 ERA_RL1g6
003f ERA_FRrg6 ERA_FR1g6
003e ERA_FLrg6 ERA_FL1g6
MOTOROLA DSP56009EVMUM B-15

Sound Field Processing Example
X/Y Memory Map for Sound Field Processor
)
003d ERA_RRrg5 ERA_RR1g5
003c ERA_RLrg5 ERA_RL1g5
003b ERA_FRrg5 ERA_FR1g5
003a ERA_FLrg5 ERA_FL1g65
0039 ERA_RRrg4 ERA_RR1g4
0038 ERA_RLrg4 ERA_RL1g4
0037 ERA_FRrg4 ERA_FR1g4
0036 ERA_FLrg4 ERA_FL1g4
0035 ERA_RRrg3 ERA_RR1g3
0034 ERA_RLrg3 ERA_RL1g3
0033 ERA_FRrg3 ERA_FR1g3
0032 ERA_FLrg3 ERA_FL1g3
0031 ERA_RRrg2 ERA_RR1g2
0030 ERA_RLrg2 ERA_RL1g2
002f ERA_FRrg2 ERA_FR1g2
002e ERA_FLrg2 ERA_FL1g2
002d ERA_RRrg1 ERA_RR1g1
002c ERA_RLrg1 ERA_RL1g1
002b ERA_FRrg1 ERA_FR1g1
002a ERA_FLrg1 ERA_FL1g1
ER_gains 0029 ERA_Ling ERA_Ring early reflection gains
EEapf 0028 APF_base APFA_OFF allpass filters EBAR and EOR pair
0027 COMB6_base COMB6A_OFF
0026 COMB5_base COMB5A_OFF
0025 COMB4_base COMB4A_OFF
0024 COMB3_base COMB3A_OFF
0023 COMB2_base COMB2A_OFF
EEcomb 0022 COMB1_base COMB1A_OFF combs EBARs and EORs
Dcomb_ebar 0021 DL_base DLA_OFF delay line EBAR and EOR (also Dcomb_eor)
0020 ER_OFFA6 ER_OFFA6
001f ER_OFFA5 ER_OFFA5
001e ER_OFFA4 ER_OFFA4
001d ER_OFFA3 ER_OFFA3
001c ER_OFFA3 ER_OFFA2
ER_off_buf 001b ER_OFFA2 ER_OFFA1 early reflection EORs
ER_ebar 001a Left_base Right_base early reflection EBARs (also TABLE1
Table B-5 X and Y Memory Map for Sound Field Processing Demo
B-16 DSP56009EVMUM MOTOROLA

Sound Field Processing Example
Reverb Time Analysis
it
s
g
g
c
B.10 REVERB TIME ANALYSIS
The time analysis for the response of the sound field processor is illustrated inFigure B-9 on the following page. The RT60 (reverberation time) is defined as twoseconds.
temp2 0019 temp storage
temp1 0018 temp storage
t3_add 0017 x(left) y(right) third transmitter addresses to transm
control 0016 control flags
mode_timeout 0015 mode change delay count
mode change delay count
hi_mode_new 0014 shi_mode_new
pio_mode_new 0013 gpio_mode_new new mode
shi_mode_set 0012 shi_mode_set shi_counter
pio_mode_set 0011 gpio_mode_set gpio_counter mode during previous pass
apf2s 0010 reserved 2nd allpass filter in series result
apf1s 000f apf1s 1st allpass filter in series result
APin 000e (double precision) input to allpass filters (also APout)
000d v(n–6)
000c v(n–5)
000b v(n–4)
000a v(n–3)
0009 v(n–2)
combs_states 0008 v(n–1) internal comb state for LPF
right 0007 front rear right channel before output to SAI
left 0006 front rear left channel before output to SAI
combs_input 0005 average input to combs
entral_channel 0004 average pre-input to combs
rear 0003 left right rear sample storage
front 0002 left right front sample storage
in_in1 0001 left_in right_in input samples from the SAI undisturbed by interrupts
in_in 0000 left_in right_in input samples from the SAI
Table B-5 X and Y Memory Map for Sound Field Processing Demo
MOTOROLA DSP56009EVMUM B-17

Sound Field Processing Example
Reverb Time Analysis
Figure B-9 Sound Field Processor Time Analysis
early reflection reverberation
B-18 DSP56009EVMUM MOTOROLA

APPENDIX C
DSP56009EVM MULTIPLEX DEFINITION
MOTOROLA DSP56009EVMUM C-1

DSP56009EVM Multiplex Definition
C.1 OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-3C.2 MULTIPLEX CABLE SPECIFICATION . . . . . . . . . . . . . . . . . C-3C.3 EVM SETUP FOR MULTIPLEXING . . . . . . . . . . . . . . . . . . . C-4
C-2 DSP56009EVMUM MOTOROLA

DSP56009EVM Multiplex Definition
Overview
C.1 OVERVIEW
Two DSP56009EVMs may be connected together to utilize the memory of two Symphony DSPs. Six-channel data is multiplexed to SDI0 and SDI1, two of the SAI transmitters on the DSP of the Transmit EVM. The data is then demultiplexed on the DSP of the Receive EVM and available as discrete channels for post-processing of certain decoding algorithms on the Transmit EVM. The file listen.cld must be downloaded onto the Receive DSP in order to de-multiplex the serial audio stream. The user’s DSP assembly files may be linked with this source file. A special cable must be built in order to take advantage of this special function.
C.2 MULTIPLEX CABLE SPECIFICATION
The Mux cable must be connected from jumper block J5 on the Transmit board to J5 on the Receive board. The cable must be no longer than seven or eight inches (preferably six inches). There must be ground wires interspersed between each clock and data line (those marked with an *). Ground connections can be found at pins 1, 2, 11, 12, etc. as seen in the SRAM and External Memory Interface schematic. The cable must be a ribbon cable split to carry the WST and SCKT signals and grounds physically separate from the WSR, SCKR, SDI0, and SDI1 signals and grounds.
Table C-1 DSP56009EVM MUX Cable Pinout
Transmit Receive Description
*3-4 *13-14 WST
*5-6 *15-16 SCKT
*14 *4 WSR
*16 *6 SCKR
*18 *8 SDI0
*20 *10 SDI1
7-8
9-10
25-26
27-28
29-30
31-32
37-38
39-40
43-44
MOTOROLA DSP56009EVMUM C-3

DSP56009EVM Multiplex Definition
EVM Setup for Multiplexing
C.3 EVM SETUP FOR MULTIPLEXING
There are a few differences between the DSP56009EVM’s typical setup and the setup for multiplexing. JP5 Jumpers must be off on both boards and the JP2 Jumper must be connected. The SPDIF connector must be input to both boards with an AC-3 demod-ulated bit-stream.
17-18
19-20
21-22
25-26
27-28
29-30
31-32
37-38
39-40
43-44
Table C-1 DSP56009EVM MUX Cable Pinout
Transmit Receive Description
C-4 DSP56009EVMUM MOTOROLA

DSP56009EVM Multiplex Definition
EVM Setup for Multiplexing
Figure C-1 DSP56009EVM Jumper Setting for Multiplexing
68HC711E9
LCD Display
SC937-02
RS-232
OnCETM
Reset
CS5390
PLD
DSP 56009
68HC705K1
CS4331CS3310 CS3310 CS4331 CS3310 CS4331
STK10C68
CS8412
CS8402A
AnalogPower
30-PinSIMMSocket
JP7
JP4
JP2
JP5
JP3
J9
J18
JP1
JP6
J2
J3
DigitalPower
SPDIFIn
SPDIFOut
Right In Left In
Analog Outputs
Right 3 Right 2Left 2 Left 1 Right 1Left 3
Analog Inputs
J5
JP9
InfraredRemoteReceiver
In
OpticalOut
Optical
J1
LS RS C Sub L R
MOTOROLA DSP56009EVMUM C-5