Embed Size (px)
Citation preview

American Institute of Aeronautics and Astronautics
1
Update on SPHERES Slosh for Acquisition of Liquid Slosh
Data aboard the ISS
Sunil Chintalapati1, Charles A. Holicker
2, Richard E. Schulman
3, Brian D. Wise
4, Gabriel D. Lapilli
5,
Hector M. Gutierrez6, and Daniel R. Kirk
7
Florida Institute of Technology, Melbourne, Florida, 32901
A current problem that severely affects the performance of spacecraft is related to slosh
dynamics in liquid propellant tanks under microgravity conditions. The confidence in
computational fluid dynamics (CFD) predictions are low because of the lack of benchmark
against experimental data. The goal of the SPHERES Slosh Experiment (SSE) is to acquire
long-duration, low-gravity liquid slosh data aboard the International Space Station. The
proposed experimental platform consists of a tank, partially filled with fluid, cameras, and
inertial sensors to monitor the fluid distribution in the tank. Currently the SSE has passed
NASA’s Critical Design Review (CDR) and Phase 0/I-II Flight Safety Review (FSR). The
manufacture and qualification testing of the flight article has been completed. The Slosh
payload is scheduled to be launched in December 2013 with on-orbit experiments to begin
shortly thereafter.
I. Introduction and Background
ropellant slosh has been an issue from the inception of liquid rocket engines. Typically rockets are spun at a
specified rotation after launch for stability purposes. Rocket upper-stages and satellites are spun for thermal
control to ensure even heating of propellant tank caused by the Sun. Liquid propellant tends to swirl insides the
fuel tank during these times. When coupled with resonance effects, sloshing increases tremendously causing attitude
change of vehicle and impede fuel ingestion into engine intake. Sloshing problem in liquid rocket engines have
been a concern since as early as 1960; there are many cited references where a space mission was either deemed
failure or could not be fully completed due to sloshing problems in rockets or spacecraft and or satellites. For
example, on April 26th, 1957 the second Jupiter missile AM-1B terminated flight at 93 seconds at an altitude of 27.3
kilometers due to propellant slosh [1]. As another example, an experimental test rig for Atlas Centaur 4 was deemed
failure due to sloshing and spillage of liquid hydrogen propellant, the tank was later modified [2].In another
example, the NEAR satellite went into safety mode because of an unexpected reaction that was possibly due to
propellant slosh after an orbital maneuver which caused a one year delay of the project [3]. Another example of
dramatic propellant slosh problem occurred at the end of a yaw maneuver during the Apollo 11 first moon landing
mission and additional thruster activity was needed for course corrections before the Lunar Lander finally landed at
a different spot than originally planned [4]. In another example, NASA’s spin-stabilized Applications Technology
Satellite 5 (ATS5) began to wobble, sending the spacecraft into an unplanned flat spin and crippling the mission.
The reason for was determined to be propellant slosh [5]. Finally, recently in March of 2007, SpaceX Falcon 1
1 Graduate Research Assistant, Mechanical and Aerospace, 150 West University Blvd, and AIAA Student Member. 2 Graduate Research Assistant, Mechanical and Aerospace, 150 West University Blvd. 3 Graduate Research Assistant, Mechanical and Aerospace, 150 West University Blvd, and AIAA Student Member. 4 Graduate Research Assistant, Mechanical and Aerospace, 150 West University Blvd. 5 Graduate Research Assistant, Mechanical and Aerospace, 150 West University Blvd. 6 Associate Professor, Mechanical and Aerospace Engineering Department. 7 Associate Professor, Mechanical and Aerospace Engineering Department, AIAA Associate Fellow.
P
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903
49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference
July 14 - 17, 2013, San Jose, CA
AIAA 2013-3903
Copyright © 2013 by the American Institute of Aeronautics and Astronautics, Inc. All rights reserved.
Joint Propulsion Conferences

American Institute of Aeronautics and Astronautics
2
vehicle tumbled out of control [6]. An oscillation appeared in the upper stage control system approximately 90
seconds into the burn and instability grew in pitch and yaw axes initially and after about 30 seconds also induced a
noticeable roll torque .This roll torque eventually overcame 2nd stage’s roll control thrusters and centrifuged
propellants, causing flame-out of the Kestrel engine. There is high confidence that LOX slosh was the primary
contributor to this instability. This conclusion has been verified by third party industry experts that have reviewed
the flight telemetry [7].
These examples show the lack of predictive capability for mission planners to accurately model slosh within a
propellant tank during a critical maneuver such as docking of cargo vehicles or pointing of observational satellites.
CFD models can be used to predict slosh events during a specified maneuver; however, confidence in the CFD tool
predictions with experimental results is severely lacking. Florida Tech has been actively involved in slosh research
since 2007; some of the activities include successful characterization of slosh on a 2- Degree of Freedom (DOF)
motion table, drop tower testing, one sounding rocket test, and two three-day reduced gravity aircraft sessions [8]
[9]. Although the series of ground experiments and trials on reduced gravity aircraft have provided valuable
experimental data-set, there is a lack of long duration, low-gravity experimental liquid slosh data which can be used
to benchmark the CFD models. Liquid behavior in micro-gravity is different from liquid behavior under the
influence of the Earth’s gravity and the need to capture the long duration, low-gravity liquid slosh data gave rise to
the SPHERES-Slosh Experiment (SSE).
II. SPHERES Slosh Experiment (SSE) Overview
The primary objective of the SPHERES Slosh Experiment (SSE) is to acquire long duration, low-gravity liquid
slosh data aboard the International Space Station [10]. The core of the SSE consists of a partially filled (with water)
transparent tank fitted to a structural frame and two cameras (in orthogonal configuration) recording the liquid
distribution. Two sets of Inertial Measurement Units (IMUs) are used to record the inertial measurements. The SSE
utilizes the manifested SPHERES laboratory and will use the VERTIGO platform (already on-board the ISS). The
SPHERES unit would propel the SSE and the VERTIGO units are used to record the caputured IMU /camera data
on its local hard drive. Figure 1 shows the three elements (Slosh payload, SPHERES, and VERTIGO) that combine
to form the SSE. The partially filled water tank is located within the backdrop and hood (labeled in Figure 1) to
mimimize the interference of the external lights on image capture.
Figure 1 Slosh Payload (left), SPHERES (top-right), and VERTIGO Avionics Stack (bottom-left)
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
3
Adequete lighting for image capture is provided via LED panels, installed within the Backdrop and Hood. The
Slosh Avionics Box contains the IMUs and also provides power to the Camera and the LED panels through the
VERTIGO unit. The Slosh Avionics Box also ensures that the captured IMU data and Camera data is recorded to the
VERTIGO harddrive. Each of the Slosh Avionics Boxes connects to a VERTIGO unit. The VERTIGO-Slosh
Avionics Box packages then connect to the SPHERES units via the SPHERES expansion port. Each SPHERES unit
resides within the Frame Arm saddles and is clamped down during the SSE operation.
During the test sessions, the SSE will conduct translational and rotational maneuvers. The experiment will
measure the resulting water behavior within the tank. Data obtained from the SSE will be used to calibrate numerical
slosh models to improve the design and reliability of future rocket vehicles and spacecraft. An isometric CAD view
of the SSE is shown in Figure 2 (top) and the manufactured SSE is shown in the bottom image.
Figure 2 SPHERES Slosh Experiment (SSE)
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
4
III. SSE Operation on the ISS
In order to complete the primary objectives, the SSE design is presented. The initial design is based on the
scientific requirement, which is an experimental platform capable of measuring liquid slosh via an image acquisition
system and a set of inertial measurement units. The final design is a culmination of many design iterations which
satisfies the requirements set forth by the ISS office and NASA (for launch activities). The final design iteration
also takes into account dynamics, kinematics, and CFD analysis to verify that the SSE is capable of producing
detectable liquid slosh and capturing it. The SSE will perform three different maneuvers on the ISS at two different
liquid fill levels (20 % liquid filled tank, and 40 % liquid filled tank) and a 40 % solid mass ( no liquid, dry weight,
which mimic the mass and initial inertia of a 40 % liquid filled tank). The three maneuvers are as follows:
1. Settling thrust maneuver: Accelerate the motionless SSE on its major axis for a fixed duration and then
apply reverse thrust to accelerate the system in the opposite direction.
2. Passive thermal control maneuver: Slowly spin the SSE on its minor axis to attain constant spin rate and
settle the fluid. Following which thermal roll about the major axis while maintaining constant major axis spin
rate.
3. Pitch to reorient maneuver: Spin the SSE about the minor axis to settle the fluid and make a sharp 45 degree
turn out of the spin plane to 2nd burn attitude.
Figure 3 shows a notional overview of each maneuver.
Figure 3 Notional overview of the three maneuvers
A summary of analyses leading to the current design of the SSE is presented in the following sub-sections.
A. Summary of the Dynamics and Kinematics of the SSE
A dynamics analysis of the SSE is performed to verify its stability and a kinematic analysis is performed to quantify
the behavior of the SSE due to an application of external forces. This behavior is sensitive to change in center of
gravity (CG) and inertia matrix of the the SSE; hence, first the maximum CG shift due to location of fluid in the
Slosh tank is computed, followed by a CG shift due to the changing fuel level in SPHERES CO2 tank is quantified.
This combination of CG shift due to the fluid location and changing fuel level provides a maximum envelope of CG
shift for the SSE. Inertia matrixes from the maximum CG shift cases are examined and further cases are developed
by changing the inertia matrix. A list of cases is developed, which include the baseline cases and different
acceleration (or force) inputs are employed on list of cases. Using a MATLAB 6 degrees of freedom (DOF) [11]
solver, the deviations in translation and rotation rates as compared with baseline cases are tabulated and plotted.
These deviations are examined to check for the impact of CG and inertia matrix on a maneuver or acceleration input
[12] [13].
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
5
B. Application of the Non-dimensional Parameters
Experimentation aboard the ISS needs a definitive approach, and the motion profile employed on the SSE needs
to have semblance to rocket upper-stage maneuvers. Three typical rocket upper-stage propellant maneuvers are
examined. A literature study was performed and relevant data was gathered and tabulated. The literature review
yielded an operation range of the rocket upper-stages. The operation range of the SSE was identified, which also
included the constraints of experimentation on ISS. The two distinct operations were mapped via non-dimensional
parameters and regime influences were analyzed. Specific results from this study were:
1. For Settling Thrust maneuver, rocket upper-stage is matched to the SSE by Froude number matching.
2. For Passive Thermal Control maneuver, rocket upper-stage is matched to the SSE by matching rotation
rates for each individual upper-stage non-dimensional number. High degree of rotation rates that are not
possible in the SSE are filtered in results.
3. For Pitch to Reorient maneuver, rocket upper-stage is matched to the SSE by matching rotation rates for
each individual upper-stage non-dimensional number. High degree of rotation rates that are not possible in
SSE are filtered in results.
Supplemental studies involve identification of working fluid for SSE, which best mimic cryogenic propellants
employed in rocket upper-stages [12] [13].
C. Summary of the Numerical Study of the SSE
Numerical simulations were performed to analyze the liquid behavior and quantify the deviation with a solid
counterpart. Figure 4 shows the sample CFD results of Passive Thermal Control (BBQ Roll) maneuver. This figure
is a compilation of input and results for this maneuver. Figure 4a shows the sample input thrust profile for this
maneuver. At time equals zero, a positive torque applied in +y direction for a duration of 10 seconds, followed by a
positive torque in +z direction for an additional 10 seconds. The SSE is allowed to coast for another 20 seconds and
changing liquid distribution is monitored. Figure 4b, Figure 4c, and Figure 4d shows results of position, velocity and
rotational rates in inertial frame of reference. These plots show three different plot lines, an empty SSE, SSE with
solid at 20% fill volume (frozen liquid), and SSE with liquid at 20% fill volume. Figure 4b shows CG position in x,
y and z direction. Figure 4e shows series of time-stamped numerical images of liquid distribution in Slosh tank. The
initial condition in this sample simulation in liquid in the end-cap of the tank (this initial condition is same for both
solid and liquid cases).
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
6
Figure 4 Sample numerical result for Passive Thermal Control maneuver, (a)Thrust profile, (b)
Position (x, y, z) vs. time result, (c) Velocity (x, y, z) vs. time result, (d) Rotation rate (x, y, z) vs. time
result, (e) Time stamped numerical images of liquid distribution
Specific results from the numerical study are as follows:
1. Liquid distribution within the Slosh tank before the start of experimentation on the ISS needs to be known
apriori. A random liquid distribution captured by the camera is a challenging input to CFD simulation and
results of CFD and experiment depend largely on getting the correct initial condition. A target initial
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
7
condition study was initiated, where a random liquid distribution would be forced to a known initial
condition. Three favorable initial conditions were identified and labeled as IC1 (liquid in end-cap), IC2
(uneven split of liquid in either of end-caps), and IC3 (liquid coated to tank walls). IC1 was attainable
through an abrupt acceleration and retarding motion for a distance of a longitudinal length of the tank. IC1
and IC2 were attainable through spinning on minor axis and the magnitude of torque and duration
determined the initial condition that would be achieved. IC3 was tough to achive in numerical simulations.
2. Based on the guidance from kinematics study and non-dimensional mapping study, a variety of motion
profiles were developed for a specific maneuver. Comparison of fluid simulation with a frozen liquid
(solid) simulation to quantify the deviations in position, velocity, acceleration, rotation rates, and angular
acceleration were accomplished. An optimized motion profile was developed for each maneuver based on
conclusions from this study.
3. A fill volume sub-study was also performed in tandem to find the optimal fill volume for the SSE. A 20%
to 40% fill volume was determined to be ideal range for experimentation; hence, two sealed tanks, one with
20% fill volume of water and another tank with 40% fill volume of water will be sent to the ISS for
experimentation.
4. An optimized list of motion profiles for three different maneuvers was derived from the numerous
numerical simulations performed. Each session is approximately 5.5 hours, which includes assembly and
disassembly of experimental platform (including SPHERES and VERTIGO integration). This list also
included a consumable usage to conserve the resources and not lose precious time in replacing the
consumable during experimentation. Table 1 shows the three maneuvers to be performed by the SSE on the
ISS. The three maneuevres will be repeated three times.
Table 1 Experiment List per Test Session
References [12] and [13] provide a detailed overview of the analyses performed and specific results obtained.
IV. SSE - Ground Testing
The goals of the SSE Ground Testing was to verify that the Slosh payload when combined with the SPHERES and
the VERTIGO unit would function normally as intended. Major aspects of the Ground Testing was to verify the
following:
A. Mechanical Fit Check
The mechanical fit check of the SSE was performed in three different operations. The first mechanical fit check was
to verify the assembly of the manufactured Slosh payload was performed as per the CAD design intent. The second
mechanical fit check was to verify the mechanical connectivity between the Slosh Avionics Box and the VERTIGO
avionics stack. The third mechanical fit check was to verify the mechanical connectivity between the SPHERES and
the Slosh Frame Arm. Figure 5 shows images of the successful mechanical fit checks.
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
8
Figure 5 Mechanical Fit Check; a) Slosh payload, b)VERTIGO – Slosh Avionics, and c) SPHERES
–Slosh Frame Arm
B. Electrical Integration Test (VERTIGO-Slosh Avionics Box)
The verification for electrical integration is performed when the Slosh Avionics Box is connected electrically
with VERTIGO. Upon the VERTIGO power ‘ON’, the following have to be achieved:
1. The camera connected to the Slosh Avionics Box is able to receive power, capture images and record
image data on the VERTIGO hard drive.
2. The IMUs in the Slosh Avionics Boxes are able to receive power, receive inertial data and record that data
to the VERTIGO hard drive.
3. The light panels in the backdrop and hood are able to receive power and operate nominally.
The electrical integration was successfully accomplished on ground motion tables. The captured camera and
IMU data was analysed post-electrical integration test.
C. Flat Floor Testing
The purpose of the flat floor test is to verify correct functionality of the integrated SSE, and to verify the impact of
depleting SPHERES CO2 propellant level and water tank fill level on the intended motion profiles of the SSE. In
order to perform flat floor testing, the SSE must be mounted on an adaptor which is capable of levitating the
experiment. Specifically, the flat floor adapter must be capable of levitating the mass of the SSE without binding on
the flat floor for any of the motion trajectories being studied. The flat floor adapter must not require any design
changes to the SSE and must not restrict the capabilities of the SSE. Figure 6 shows a sample image of the SSE on
the flat floor table. The SSE shown in Figure 6 has ground units (not flight certified) of backdrop, hood, Slosh
Avionics Box, which are used for ascertain the flat floor test procedures for the SSE.
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
9
Figure 6 Preliminary Flat Floor Testing
The key purpose of flat floor testing is to quantify the impact of CO2 tank fill level on the SSE trajectory for each of
the three motion profiles. The trajectories for translation (settling maneuver), rotation (passive thermal control
maneuver), and combined rotation and translation maneuvers (pitch to reorient maneuver) will be executed with a
single water tank for both equal CO2 tank fill levels between the two SPHERES units as well as different CO2 tank
levels between the two SPHERES units. This process is then repeated again for a different water volume. The data
acquired from these tests will provide an understanding of the sensitivity of the experiment to CO2 and water fill
volume as well benchmarking for the 6-DOF CFD and analytical models used to predict the behavior of the SSE
trajectories. The impact of the CO2 slosh on the trajectory deviation of the SSE during flat floor operation is also
negligible; instead the CO2 fuel imbalance changes the overall CG and inertia of the SSE and results in a different
trajectory. The adapter used for levitating the SSE employs two large CO2 tanks and the changing mass of this CO2
used for levitation also changes the overall mass of the experiment. Therefore, the mass of the levitation CO2 will be
monitored through weight measurement and the updated total mass of the system will be used for trajectory analysis.
The SSE Flat Floor testing is currently underway and scheduled to be completed by mid-July 2013.
V. SSE - Flight Safety Review
The Flight Safety Review (FSR) process is defined in Space Shuttle Program (SSP) 30599, Safety Review
Process, International Space Station Program. SSP 30599 provides information and guidance on flight certifying
payloads for both launch and operations aboard the ISS. The safety review process for the Slosh payload is managed
by a Payload Safety Review Panel (PSRP) in four different safety review meetings held at different junctures of the
project. A Phase 0 FSR was held (July 19, 2012) so that the Payload Developer (PD) can provide a detailed
description of the payload material, construction and intended operations aboard the ISS. The PSRP then identifies
applicable hazards, which then has to be eliminated or mitigated by the PD. The standard list of hazards causes,
controls, and verification methods are provided in Johnson Space Center (JSC) form 1230, Flight Payload
Standardized Hazard Control Report. Phase I-II FSR (March 6, 2013) was held to verify the completion status of the
applicable hazards. Typically the Phase III FSR is held to verify the completion of analysis, testing, and relevant
waivers for payloads flight certification. All the applicable hazards for the Slosh payload have been addressed either
by analysis, testing, and or procurement of official waivers. A brief summary of applicable hazards, hazard controls,
and verification method for the Slosh payload is provided in Table 2.
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
10
Table 2 Slosh Standard Hazard Controls Summary
Hazard Hazard Controls
(Complies with)Verification Method Status
MAPTIS approved materials
Perform flammability assessment (tests)
By analysis
MAPTIS approved materials
Perform offgassing assessment (tests)
By analysis
Review the SSE CAD drawings
Sharp edge inspection (Nylon Glove Test)
4Touch Temperature IVA Resulting in
Crew InjurySSP 50005 Perform Test Temperature Test Completed
Review and modify Stowage bag
configuration
Pass a vibration test at flight levels/post-
test visual inspection is needed
6
Electromagnetic Radiation (Non-
Ionizing) causing injury to crew or
interference with ISS systems
SSP 30237 Perform EMI testing Completed
7 Lasers causing injury to crew
8
Noise Exposure causing hearing damage
or crew injury/death from communication
interference or inability to detect cautions
and alarms
9Battery Failure causing crew injury
(shock, burn, fire, toxicity hazard)
10Capacitors used as energy storage
devices
Review of design to assure implementation
of proper wire sizing and circuit.
Protection for Slosh Experiment to verify it
meets requirements in TA-92-038.
Inspection of "as-built" hardware to ensure
wire sizing and circuit protection is in
accordance with drawing/design.
12
Mating/Demating Power Connectors
causing crew injury due to generation of
molten metal or damage to ISS mission-
or life-critical electrical equipment
Meets the low power
criteria of letter MA2-99-
170
Verify circuit protection keeps current
under 3A.Completed
13 Rotating Equipment causing crew injury
14 Interference with Translation Paths
Design does not impede
emergency IVA egress to
the remaining adjacent
pressurized volumes.
Per desktop analysis, the SSE is a free-
floating experiment which does not impede
emergency IVA egress to the remaining
adjacent pressurized volumes
Completed
15 Structural Failure
16 Structural Failure of Sealed Containers
17 Structural Failure of Vented Containers JSC 1230
Check the design of the avionics box to
ensure Maximum Effective Vent Ratio
(MEVR) for a 0.01 psid pressure
differential is less than or equal to 2000 in.
Completed
Material Flammability NASA STD-6001B Completed1
2 Material Offgassing NASA STD-6001B Completed
Mechanical Hazards Causing Injury to
IVA Crew (sharp edges, pinch points,
etc.)
3 SSP 51700 Completed
CompletedSSP 50835Shatterable Material releasing 50 micron
or larger fragments causing injury to crew5
Not Applicable
Not Applicable
Not Applicable
Not Applicable
Not Applicable
11 SSP 57000 Completed
Refer Unique Hazard
Refer Unique Hazard
Electrical Power causing crew injury or
damage to electrical equipment
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
11
Flammability and offgassing assessment was performed as per NASA STD 6001B on the 3D printed plastic
components of the SSE. All the components of the SSE are either Materials and Processes Technical Information
System (MAPTIS) approved, have passed flammability and offgassing assessment and or deemed acceptable by
analysis.
A sharp edge inspection of each individual component, as well as the assembled experiment, was conducted to
verify that edges, corners, or protrusion geometries are in compliance with SSP 51700 Section 3.22.1, Sharp Edges
and Corner Protection. A nylon glove test was used to perform this verification.
Requirements for touch temperature are based of SSP 50005, section 6.5.3, where a minimum temperature of 4
ºC (39 ºF) and a maximum temperature of 45 ºC (113 ºF) is passable for any components susceptible to temperature
changes. The Touch Temperature testing was performed at NASA MSFC, EMC/EMI facility for the flight Slosh
hardware articles in the ISS configuration (complete operational SSE assembly). Temperature readings were taken at
pre-defined locations on the surface of the SSE. The temperature readings were taken every five minutes after the
SSE startup for a total duration of 60 minutes. The detailed procedure for performing the Touch Temperature is
defined in the Touch Temperature Test Plan, which was reviewed and witnessed by Government personnel. The
touch temperature ranges of the Slosh hardware are within the prescribed temperature limits as defined in SSP
50005.
The lens of the camera is susceptible to shattering during launch or stowage due to vibration loads. Each camera
will be stowed in a double bag configuration, where the inner most bag is optically clear so that a crew member can
visually inspect the camera lens prior to opening the bag. If a crack exists or the lens has been damaged, the camera
is not removed and will not be used. The Slosh hardware was vibration tested in its stowage configuration (bubble
wrapped and packed in class III triple CTB and tested to a maximum flight random vibration envelope as specified
in SSP 50835 (Table 3.1.1.2.1.2.3.2-3 and Table 3.1.1.2.1.2.3.2-4). All the three axis of the triple CTB was vibration
tested for a duration of 180 seconds per axis (Qualification standard or three time the duration of proto-flight
standard). The lenses of the camera were in no way damaged during the vibration test and the cameras continue to
function as intended (post-vibration). The LED panels in the Hood and Backdrop were not damaged or shattered
during the vibration test. The structural integrity of the Slosh tank was not damaged and there was no leakage
present post vibration.
An EMI test for Radiated Emissions (RE02) was performed on the operational SSE at NASA MSFC, EMI Test
Facility. The entire SSE (SPHERES/VERTIGO/SLOSH system) complement was subjected to Electromagnetic
Emissions testing as specified in SSP 30237 and SSP 30238.
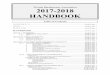
The power source for all electronic equipment in the SSE is supplied by VERTIGO’s internal battery. The Slosh
Avionics Box consists of 4 pairs of LEDs on the external surface that provide visual confirmation regarding the
proper functionality of the various internal components. The colored LEDs provide a quick visual feedback to the
operator confirming that the box is working properly. If the LEDs indicate the box is not working, a replacement
box will be installed on the experiment and the defective box will not be used. In the order of operations, two red
LEDs indicate an incoming voltage of 5V and 12V from VERTIGO (Figure 7). Two green LEDs indicate proper
circuit protection and the power output for camera/lighting system and IMUs (Figure 7). Two yellow LEDs indicate
input commands to the IMUs. Finally, two blue LEDs indicate data being received from the IMUs. For example, a
non-lit green LED would indicate problems with the circuit protection line. This would result in no power output to
the corresponding system as the box is designed to prevent any power distribution in case of hardware failure.
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
12
Figure 7 SPHERES-VERTIGO-Slosh Avionics Box package in operation; two lit red LEDs indicate
correct voltage, two lit green LEDs indicate circuit protection and power output
A review of the mechanical and electrical drawings, as well as an inspection of the Slosh Avionics Box was
performed to satisfy the guidelines of the section 11 and 12 in Table 2.
The verification for Structural Failure of Vented Container was performed using the criteria outlined in the
standard hazard document. The criteria states that the ratio of the total volume of the container to the open vent area
should be less than 2,000 in. The total volume of the Slosh Avionics Box is 242.5 cm3 (14.8 in
3) and the vent area is
0.32 cm2 (0.05 in
2), which provides a volume-to-area ratio of 296 in, and results in a factor of safety of over 6.
The PSRP combined the Standard hazard 15 and 16 with additional hazards to form a unique hazard titled
“Leakage of the Slosh Tank”. The unique hazard required pressure testing the tank to maximum delta pressure of 1.5
atms, review of manufacture procedure, review of fill procedures and evaluating the toxic rating of the liquid
contained in the Slosh tank. The Slosh tank was pressure tested for a 1.5 atm pressure differential to verify the
structural integrity. Structural integrity was verified through a leak test and visual inspection for cracks. Four
different types of pressurization tests were completed and summary of the results are provided below:
1. The first pressure test is a gradual increase of pressure within the Wet Slosh tank (full of water) from
ambient pressure to a pressure differential of 1.5 atmospheres (22.0 ± 1.0 psig). The gradual increase of
pressure took 80 seconds. The increased internal pressure was held constant for 60 second duration and the
tank was then inspected. Result: PASS
2. The second pressure test is a rapid increase of pressure within the Wet Slosh tank from ambient pressure to
a pressure differential of 1.5 atmospheres (22.0 ± 1.0 psig). The rapid increase of pressure took 0.5 seconds.
The increased internal pressure was held constant for 60 second duration and the tank was then inspected.
Result: PASS
3. The third pressure test is a gradual increase of pressure within the Dry Slosh tank (no water) from ambient
pressure to a pressure differential of 1.5 atmospheres (22.0 ± 1.0 psig). The gradual increase of pressure
took 80 seconds. The increased internal pressure was held constant for 60 second duration and the tank was
inspected. Result: PASS
4. The fourth pressure test is a rapid increase of pressure within the Dry Slosh tank from ambient pressure to a
pressure differential of 1.5 atmospheres (22.0 ± 1.0 psig). The rapid increase of pressure took 0.5 seconds.
The increased internal pressure was held constant for 60 second duration and the tank was inspected.
Result: PASS
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903

American Institute of Aeronautics and Astronautics
13
Besides the Standard hazards and the unique hazard, the PD had to perform a collision analysis for a scenario in
which the SSE would strike the walls of the ISS. The PD also had to verify (analysis and testing) the effectiveness of
the clamp mechanism (which secures the SPHERES unit with the Slosh Frame) during a potential collision scenario.
VI. Conclusion
The primary objective of the SSE is to acquire long duration, low-gravity liquid slosh data aboard the ISS. This
paper presents a progress update of the SSE, which is scheduled to be launched in December 2013 and perform
experiments during increment 37-38. An initial check-out session will be done to ensure all components of the SSE
are functioning as intended. There are three allotted session for the SSE; a 20% liquid fill level tank will be used for
session 1 (three maneuvers as defined in Table 1), a 40% liquid fill level tank will be used for session 2 (three
maneuvers as defined in Table 1), and a 40% fill level solid mass tank will be used for session 3 (three maneuvers as
defined in Table 1). The experimental data acquired will be part of NASA Kennedy Space Center (KSC) Launch
Services Program (LSP) Slosh catalog, which will be openly available to fluid slosh researcher in industry and
academia.
Acknowledgments
The authors wish to express gratitude to Dr. Paul Schallhorn, Jacob Roth, Brandon Marsell (NASA KSC,
Launch Services Program), and David Piryk from a.i solutions for technical input and funding this project. The
authors also wish to thank Dr. Alvar Saenz-Otero and Dr. David Miller from MIT Space Systems Lab for technical
advice regarding SPHERES and VERTIGO.
References
1 Kyle,. Space Launch Report. http://www.spacelaunchreport.com/jupiter4.html (accessed July 2012).
2 Hydrogen vent test rig in Space Power Chamber No.2. http://awt.grc.nasa.gov/siteimgdetail/detail.np/detail-90.html (accessed
July 2012).
3 Strikwerda, T. E. and et al. NEAR Shoemaker: Major anomaly survival, delayed rendezvous and mission success; Guidance
and control 2001: Breckenridge, CO, 2001.
4 Jones, E. M. The First Lunar Landing. http://www.history.nasa.gov/alsj/a11/a11.landing.html (accessed Oct 24, 2011).
5 Schlee, K. Modeling Spacecraft Fuel Slosh at Embry-Riddle Aeronautical University.
http://www.mathworks.com/company/newsletters/articles/modeling-spacecraft-fuel-slosh-at-embry-riddle-aeronautical-
university.html (accessed July 2012).
6 Musk, E. Space Exploration Technologies Corporation - Update Archive.
http://www.spacex.com/updates_archive.php?page=0107-0707. (accessed June 25, 2013).
7 F1-DemoFlight2-Flight-Review. http://www.spacex.com/F1-DemoFlight2-Flight-Review.pdf. (accessed June 25, 2013).
8 Zhou, R., Vergalla, M., Chintalapati, S., Kirk, D., and Gutierrez, H., "Experimental and Numerical Investigation of Liquid
Slosh Behavior Using Ground-Based Platforms," Journal of Spacecraft and Rockets, Vol. 49, No. 6, Nov-Dec 2012, pp. 1194-
1204.
9 Faure, J., Vergalla, M., Zhou, R., Chintalapati, S., Gutierrez, H., and Kirk, D., "Experimental Platform for the Study of Liquid
Slosh Dynamics Using Sounding Rockets," International Review of Aerospace Engineering, Vol. 3, No. 1, 2010, pp. 59-66.
10 Schallhorn, P., Roth, J., Marsell, B., Kirk, D., Gutierrez, H., Saenz-Otero, A., Dorney, D., and Moder, J. "Acquisition of
Long-Duration, Low-Gravity Slosh Data Utilizing Existing ISS Equipment (SPHERES) for Calibration of CFD Models of
Coupled Fluid-Vehicle Behavior," 1st Annual International Space Station (ISS) Research and Development Conference,
Denver, CO, 26-28 Jun. 2012.
11 MATLAB Documentation. http://www.mathworks.com/help/matlab/ (accessed Apr 21, 2013).
12 Chintalapati, S., Holicker, C. A., Schulman, R. E., Contreras, E., Gutierrez, H. M., and Kirk, D. R. "Design of an
Experimental Platform for Acquisition of Liquid Slosh Data aboard the International Space Station," 48th
AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit , Atlanta, Georgia, July 2012.
13 Chintalapati, S. Design of an Experimental Platform for Acquisition of Liquid Slosh Data aboard the International Space
Station, Florida Institute of Technology; Master's Thesis, Melbourne, 2012.
Dow
nloa
ded
by F
LO
RID
A I
NST
ITU
TE
OF
TE
CH
NO
LO
GY
on
July
27,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
013-
3903