Embed Size (px)
Citation preview

University of Nigeria Virtual Library
Serial No
Author 1 OSUAGU, C. C.
Author 2 EKEMEZIE, P.N.
Author 3
Title A Self Organizing Fuzzy Logic Controller
Keywords
Description A Self Organizing Fuzzy Logic Controller
Category Engineering
Publisher
Publication Date
Signature

Fax (042) 770645; 771500 OFFICE O F 'THE DEAN Telex: 51496 ULlONS N1G E-Maif: misunn Q aol. corn
Tel: 042 - 77186'3
Our !Qf:.. .... . ... . .. . . .. . . . . . . . . . . . . . . . . . . . . . , . .... ,..
Engr. P.A. Ekeinezie and Engr. Dr. C.C. Osuagwu Dept. of ~lektronic Engineering University of Nigeria, Nsuklca.
Dear Engr. Ekemezie and Dr. Osuagwu,
ACCEPTANCE OF PAPER FOR PUB1,ICATION
March 6 , 1998 Date: ......... .....................................
1 am pleased to inform you that your paper titled "A Self-Organising Fuzzy Logic Controller " has been accepted for publication in Nigerian Jaurnal of Technology. The paper will appear in the next issue of the Journal.
Best wishes.
Yours faithfully,
Engr. Prof. S.O. Onyegegbu.

4 ' A SELF-ORGAN'ISING FUZZY LOGIC CONTROLLER
Paul N. Ekemezie , Charles C. Osuagwu I
Department of Electronic Engineering . Department of Electronic Engineering Univeroity of Nigeria, Neukka. University of Nigeria, Neukk'a.
*
Abstract
'One major drawback of fuzzy logic contr,ollers is the difficulty
encountered in the contruction of a rule-base t h s t is suitable for
the controlled process.- In this paper we tackle this problem by
proposing an 'algorithm that allows a designer to initially specify
a possibly inaccurate rule~base, which is then mide more and more
accurate in the course of operation of the control system. The
ef f ect.ivscess of the proposed self-organising procedurk has been
investigatsd by means of computer simulation. The results of the
silr,ulati.on studies 'indicate that the proposed algorithm is
ef f E:.I- .j (.I<+ -
1. Introduction
The greatest limitation of fuzzy logic control is the lack of a
.systematic methodology for , .. developing fuzzy rules. The rule-base
of a fuzzy logic controller - (FLC) often needs to be manuzilly -.
adjusted en a trial-and-error b a s i s i-n order for the concrol system
to reach the desired level of performance. .: This tuning process
could be quite compiicated, and could be t i i n k corlsuinii~s for d
first-l: Line FLC developer [I] .
Apart trci;i : Irricial tuning problem, there is this general
problem in process control, namely, that changes in the operatng
for. This means that a FLC needs to be continually tunzd if IL 1s

to be practically relevant-. The on-the-job tuning process is no , i . I I
I . 1 , -
les- - - x - h * - - n m ~ than thcr ini ti a1 t-ilninrr nf the nv=t-tam Wenre i + i n
de s
to
FLC
whi
t a k
of
der
aPF
USE
met
sat
gel ' LO!
tec
ot:
te,

fuzzy log
Linkens 2
structure
teacher s
fuzzy con1
used by
(MRAC) , a
claimed t
are comp
network F
Careful s
that the
(SFCA) wh
make thc
eff icienc
the netwc
an archit
controller- uaseu o r 1 L r l r a r ~ t i LU S ~ L L - L ~ ~ L - I L ,ALY rule-~ase. A r l r;nLs
paper, we want to formulate an adaptive FLC strategy based on these
ideas. .s developed in [Sl for neuro-
fuzzy cc t r a d i t i o n a l FLC.
The papt, +, w,,,,.,ub- -, .le define the research problem
in § 2. The self -0rqanisinq FLC alqorithm is aresented in § 3.
Simula
descri 6
studie
remark









Rulebaee :
Iiavi,ng specified the fuzzy- sets, the next task in the ,FLC design
process is to eliclt the control rules. Since the fuzzy reasoner
has only two inputs, each of which can fall into any of seven fuzzy
regions, writing the rules s i m p l y involves deciding what the outpuz I
'fuzzy set should be dor &&'possible input dbrnbination. From chc
interaction of the t 'wo inputs, a seven-by-seven matrix can be I
constructed showing the output for each input combination (Table
1). This matrix is the rulebase for the fuzzy controller. I
Table 1. Rulebase matrix.
' Ikfinition of the iliiciil' rulebase rhakes u'se o£ Table I. The
rulebase is stored as in Table 1, but with the control o u t p u r I
linguistic labels (NL, NM, NS, 2 , PSI PM, PL) replaced by the
I Change- i n error
E r r o r
NL
NM
NL '
NL
NL
NL
NM
NS
NS
7.R
PS
NL
NL
NM
NM
NS
ZR
I: I z
NS
-- ' 7
NL
I
I
NM
NS
Zii
ZR
PS
PS
ZR
PS
PM
ZR
I
NM
( PL
NM
NS
ZR
PS
PS
FM
PS
I
NM
NS
ZR
FS
PS
PM
PL
PM
NS
PL
NS
NS
ZR
PS
PM
PL
FL
IZR
PS
PM
,PL
PL
PL

second set) were put into consideration. L 1 '
Simulation Procedure
, The :
the : the
appn
each
time
The
1: haul
equa
chat
the ;
' firs
simulation program was- run for fifty cycles, so as to enable ' . T
learning process to possibly stabilise. By stabilisation of
lea~ning process is meant that there will nat be any
acihble adjustmen; oi the rulebase from cycle to cycle. In
cycle the contrql system is given a step input and the c'ycle
is such that the system settles to a steady state responqe.
cycle time used for the simulation study was 5 secbnds, even
gh any time greater than the settling time could have served
lly well. (The simulation program was designed in such a way
the rulebase resulting from a cycle is avail~ble for use in
next ~ y c l e . ) The response of the system was recorded after the
t, twentieth and f i f Pieth cycles. 'The resulting rulebase a£ ter
f i r e + t w a n t i o r h and f i f t i 0 t h rvrl ~s W P Y O 7 7 cr, - , - s ~ n ~ d e d t-n the , ,, - c, - ..-...-A - - .. -..- - - - -- -.. - . I - . - -L ..--- -...-- ---VL..-U, uY
1 find out how the adaptation mechanism modified the rulebase.
5 Results and discussion
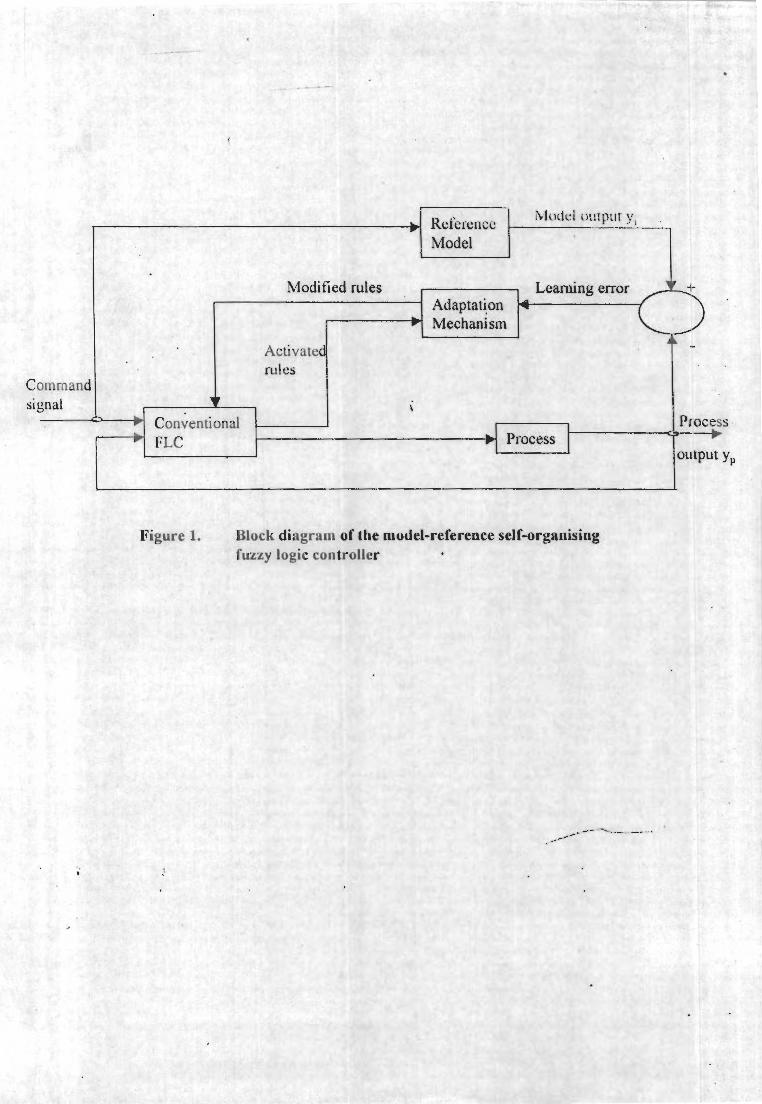
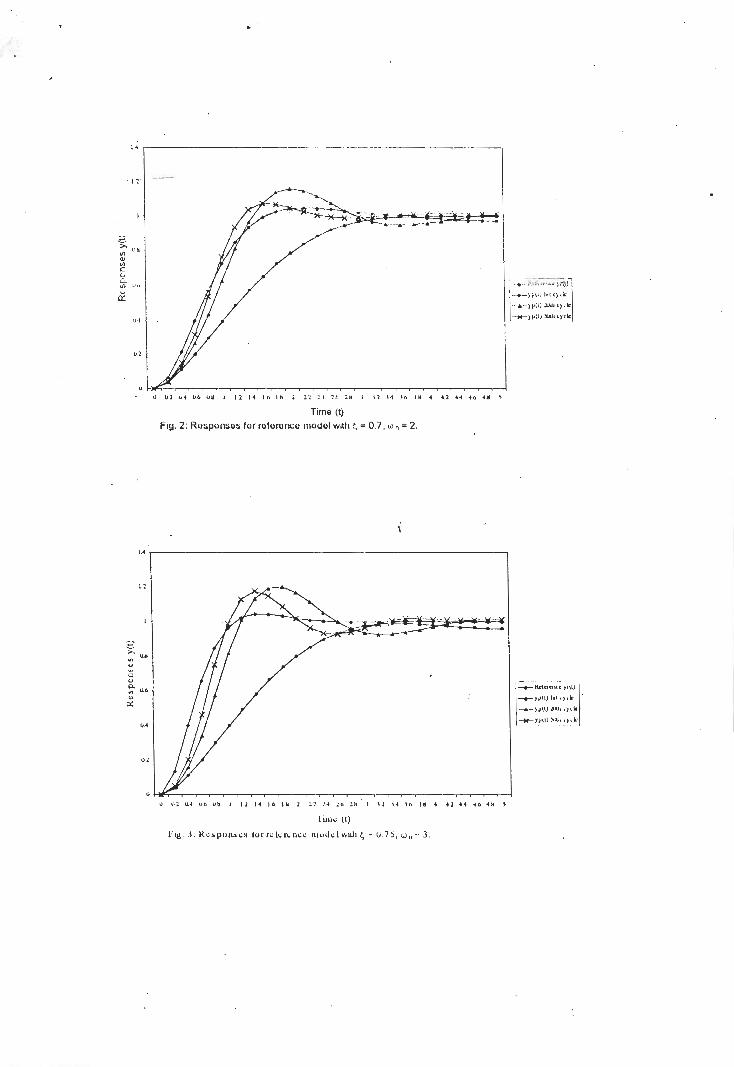
Fig. 2 shows the outpht responses of the process in comparison with
che reference model a£ ter the first, twentieth and fiftieth cycles
c ~ f the adap,tatiic I n >n procedure, for the reference model parameters w
Takl a 3 c h n ~ ~ ~ c the a d i i i ~ r m u n t - nf + h a r i r l nhaca
Fig. 3 SI~UWS LIE U U L ~ U C LCSLJUIISCY U L L L L ~ ~ L U L X S S III C . U N i p d L L Y U I 1 W L L I ~
t:he reference model agtes the first, twentieth and fiftieth cycles

self-organising cont'roller could possibly force the process .:o
it.
In Table 2, ic can be seen that the adaptation rnechanisni adjus=s
*its rulebase in respqnqe.to the learning error. Starting with rile . initial rule-base shown in Eq. (201, the adaptation mechani:m
continually adjusted the fired rules as control progres6ed. Rules
that were not fired were not affected by the adaptation mechanism.
A '
aki,ng a closer look at table 2, one can see which of the rules
hat were adjusted by the adaptation mechanism, and which were n o t .
11 the rules represented by the first and second columns of t.he
ulebase matrix were not influenced by the adaptation mechanism.
n the third columk; R,, and R,, were' not adjusted. The
djustment of the rules in the third column started right from the
irst cycle, and considerable adjustment was done. In the i o u r c h
olumn, only R,, and R,, were noL adjusted. Also, the ad jus t r n~ l i t : of @
he rules in the fourth column started right from the first cy;;;~,
.nd considerable adjustment was done. In the fifth column, three
8f tha rules are qdjusted; R,,, R,, and RS5. There was no
tdjustment of the rules in the sixrh column. In the seventh
:olurnn, only R,, is adjusted, and by a significant amount.
The adjustment pactern indicated in table 2 is not sur~risins, when
varia
and f
surpr



tef erences
W. C. Daugherty et all I1Perforrnance evaluation of a self- tuning fuzzy cohtroller, " Proc. IEEE Int . Conf . on Fuzzy Sys., pp. 389-397, March 1992.
T. ~rocyck and E. H. Marndani, A linguistic self-organising controller," Autornatica, V o l . 15, pp. 15-30, 1979.
W. ~ e d r y c z , "Design, of fuzzy control algorithms with tk.2 aid of fuzzy mode1s;""in Industrial Applications of Fuzzy control, ed. by M. Sugeno. Amsterdam: North - Holland, 1985.
T. Takagi and M. Sugeno, "Fuzzy identification of 'systems and its applications to modeling and control, " IEEE Trans. Sys. an znd Cyber. Vol. SMC-15, pp. 116-132, 1'385.
* J. Nie and D. A. Linkens, "Fast self -learning multivariabl- fuzzy controllers constructed f r a n a modif i cd Cr'N l t r : t w ~ i k Int. 3. Control. vol. 60, no. 3, pp 369-393, 19~5.'
J. Nie and D. X. Linkens, "A hybrid neural-network-bast-,: self-organizing contr6llerIM Int. J. Control. vol. 60, no. 2, pp 197-222, 1994.
D. A. Linkens and J. Nie, "~ack-propagation neural -networ k based fuzzy controller with a self -learning teacher, Int . J. Control. vol. 60, no. 1, pp 17-39, 1994.
I . f 4 ' 6
B. Kosko, "Addition as fuzzy mutual entropy," Informatior: Sciences, vol. 73, pp. 2 7 3 - 2 6 4 , T t . 1993. .
I
I. J. Nagrath and M. Gopal, Control ~y'stems Engineering, 2 ed. New Delhi: Wiley Eastern, 1981.
i101 J. J. ~istefand, 111, SchaumJ s Outline of Feedback and control Systems.. New York: McGraw-Hill, 1976.
[Ill E. Kreysig, Advanced Engineering Mathematics, 4 ed. N e w Yqrk: John Wile9 & sans, 1979.
-I 0 U 1 " 4 Ub U I 1 1 1 14 I b I b 1 21 LI 2 0 2 8 I I 2 $ 4 I b JLI 4 4 2 44 4b 4d 5
Fig. 2: Responses for refemnce model wR)i.E, = 0.7. w = 2.





























