Embed Size (px)
Citation preview

UNIVERSITA DEGLI STUDI DI
PADOVA
Facolta di Ingegneria
Corso di Laurea in Ingegneria dell’Informazione
Tesi di Laurea Triennale
Inferenza statistica per Hidden
Markov Models
Relatore: Laureando:
Prof. Lorenzo Finesso Marco Ruzza
Anno Accademico 2010-11

Alla mia famiglia,
che mi e sempre stata vicina
nel momento del bisogno.

Indice
1 Introduzione 1
2 HMM: tre definizioni, un unico concetto 4
2.1 Le tre definizioni . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Equivalenza tra le definizioni . . . . . . . . . . . . . . . . . . 8
2.3 Elementi, notazione e meccanismo di un HMM . . . . . . . . 9
3 Problemi collegati agli HMM 13
3.1 I tre problemi per gli HMM . . . . . . . . . . . . . . . . . . . 13
3.2 Problema di valutazione . . . . . . . . . . . . . . . . . . . . . 14
3.2.1 Calcolo diretto . . . . . . . . . . . . . . . . . . . . . . 14
3.2.2 Forward-procedure . . . . . . . . . . . . . . . . . . . . 15
3.2.3 Backward-procedure . . . . . . . . . . . . . . . . . . . 17
3.2.4 Forward-backward procedure . . . . . . . . . . . . . . 19
3.3 Problema di decodifica . . . . . . . . . . . . . . . . . . . . . . 19
3.3.1 Riduzione della complessita attraverso la ricorsione . . 20
3.3.2 Algoritmo di Viterbi . . . . . . . . . . . . . . . . . . . 21
3.4 Problema di addestramento . . . . . . . . . . . . . . . . . . . 22
3.4.1 Metodo di Baum-Welch . . . . . . . . . . . . . . . . . 23
4 Esempi di applicazione degli HMM 25
4.1 Riconoscimento vocale . . . . . . . . . . . . . . . . . . . . . . 25
4.2 Computer Vision . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3 Biologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5 Conclusioni 31
Bibliografia 32
II

Elenco delle figure
2.1 HMM del tipo ‘funzione deterministica di una catena di Markov’.
Nel dettaglio: (a) spazio degli stati X e spazio dei simboli os-
servabili Y; (b) natura markoviana del processo nascosto; (c)
generazione di natura deterministica dei simboli osservabili a
partire dagli stati nascosti; (d) una particolare realizzazione
dell’HMM in questione. . . . . . . . . . . . . . . . . . . . . . 5
2.2 HMM del tipo ‘funzione stocastica di una catena di Markov’.
Nel dettaglio: (a) spazio degli stati X e spazio dei simboli
osservabili Y; (b) natura markoviana del processo nascos-
to; (c) generazione di natura aleatoria dei simboli osserv-
abili a partire dagli stati nascosti; (d) particolare realizzazione
dell’HMM in questione. . . . . . . . . . . . . . . . . . . . . . 6
2.3 HMM del tipo ‘processo di Markov congiunto’. Nel det-
taglio: (a) spazio degli stati X e spazio dei simboli osservabili
Y; (b) natura markoviana del processo nascosto; (c) visione
delle transizioni da stato a stato del processo nascosto e del
processo congiunto. . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Sequenza di operazioni richieste per il computo della variabile-
forward αt+1(j). . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 Sequenza di operazioni richieste per il computo della variabile-
backward βt(i). . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Sequenza di operazioni richieste per il computo della variabile
ξt(i, j). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1 Catena di Markov presente nell’HMM per il riconoscimento
del DNA di Churchill. . . . . . . . . . . . . . . . . . . . . . . 29
III

Capitolo 1
Introduzione
Molte volte in ambito ingegneristico ci si trova a dover far fronte ad un
problema come il seguente. Un processo del mondo reale produce una se-
quenza di simboli osservabili, che possono essere a valori discreti (uscite di
esperimenti di lancio di una moneta, lettere da un alfabeto finito, ...) o con-
tinui (campioni del parlato, vettori di autocorrelazione, ...): cio che si chiede
e di costruire un modello del segnale che spieghi e caratterizzi l’occorrenza
dei simboli osservati, cosı da poter essere utilizzato per l’identificazione e il
riconoscimento di altre sequenze di osservazioni.
La teoria dei segnali e dei sistemi ci insegna che per affrontare un tale
problema si devono prendere alcune fondamentali decisioni, quale, per es-
empio, la forma del modello: lineare o non-lineare, tempo-variante o tempo-
invariante, deterministico o stocastico.
I modelli di sistemi lineari tempo-invarianti, che modellano i simboli os-
servati come l’uscita di un sistema lineare a parametri costanti eccitato da
un opportuno ingresso, si sono dimostrati utili per una grandissima vari-
eta di applicazioni. Molti segnali del mondo reale, tuttavia, non possono
essere significativamente modellati senza considerare una variazione tempo-
rale dei parametri prima accennati. Un tale problema puo essere affrontato
attraverso il seguente approccio.
Molti tra i segnali fisici che nel loro complesso necessitano di modelli
tempo-varianti possono essere ciononostante modellati da un sistema lin-
eare tempo-invariante se considerati in un intervallo di tempo sufficiente-
mente piccolo: la natura tempo-variante del processo puo essere vista come
una diretta concatenazione di questi brevi intervalli di tempo, ciascuno dei
quali singolarmente rappresentato da un modello di sistema tempo invari-
1

CAPITOLO 1. INTRODUZIONE 2
ante. Ciascuno di questi intervalli di tempo di osservazione viene visto come
un’unita con una durata prestabilita, che in molti sistemi fisici si determina
in modo empirico.
In molti processi, ovviamente, non ci si aspetta che le proprieta del pro-
cesso cambino sincronicamente con la durata dell’analisi di ogni unita, ne
che si osservino drastici cambiamenti da un’unita alla successiva, se non in
particolari casi. In molti casi, infatti, cio che si osserva e un cambiamen-
to di comportamento sequenziale: le proprieta del processo solitamente si
mantengono per un certo periodo di tempo e successivamente cambiano,
gradualmente o rapidamente, in un altro insieme di proprieta. Una rapp-
resentazione efficiente puo allora essere ottenuta utilizzando un modello di
intervallo di tempo comune per ogni parte stabile del segnale, con l’aggiun-
ta di una qualche caratterizzazione di come un tale periodo evolve verso il
successivo.
Ecco quindi che per modellare un mondo mutevole si usa una variabile
aleatoria per ogni aspetto del suo stato in ogni intervallo temporale. Le
relazioni tra queste variabili descrivono l’evoluzione dello stato. Il processo
di cambiamento puo essere visto come una serie di fotografie, ognuna delle
quali descrive lo stato in un particolare istante. Ogni fotografia contiene
un insieme di variabili aleatorie, alcune osservabili e altre no. Per semplic-
ita presumeremo che in ogni intervallo di tempo sia osservabile lo stesso
sottoinsieme di variabili e assumeremo che:
• i cambiamenti sono causati da un processo stazionario, ovvero che i
cambiamenti stessi sono regolati da leggi immutabili nel tempo;
• lo stato corrente dipende soltanto da una storia finita di stati prece-
denti; studieremo per semplicita la dipendenza di uno stato dal solo
stato precedente.
Da queste assunzioni nasce l’idea degli Hidden Markov Models (HMM),
processi doppiamente stocastici con un processo stocastico sottostante che
non e osservabile (hidden, nascosto), ma che puo solo essere osservato at-
traverso un altro insieme di processi stocastici che producono la sequenza di
simboli osservati.
Gli Hidden Markov Models furono originariamente introdotti nella let-
teratura statistica nel lontano 1957. In seguito furono usati con parziale
successo in varie applicazioni nel mondo dell’ingegneria a partire dalla fine

CAPITOLO 1. INTRODUZIONE 3
degli anni ’70. Alcune di questa applicazioni riguardano lo speech process-
ing e la codifica di sorgente. Recentemente, gli HMM sono stati utilizzati
anche in alcuni problemi di biologia computazionale, quali l’identificazione
dei geni di un organismo dal suo DNA e la classificazione di proteine in un
piccolo numero di famiglie.
Data la presenza nella letteratura di diverse definizioni di HMM, nel
capitolo 2 si considereranno le tre definizioni prevalenti, dimostrandone la
completa equivalenza dal punto di vista del potere espressivo.
In seguito nel capitolo 3 si analizzeranno i problemi di interesse per questi
modelli stocastici.
Infine nel capitolo 4 verranno offerti alcuni esempi di problemi ingegner-
istici affrontati attraverso gli HMM.

Capitolo 2
HMM: tre definizioni, un
unico concetto
In questo capitolo prenderemo in considerazione le tre diverse definizioni
di Hidden Markov Model che sono prevalenti in letteratura, e mostreremo
che sono tutte equivalenti tra loro in termini di potenza espressiva. In altre
parole, se un processo stocastico stazionario su un alfabeto finito ha uno dei
tre qualsiasi tipi di HMM, allora esso ha tutti e tre i tipi di HMM. Tuttavia,
la dimensione dello spazio degli stati e in generale differente nei tre tipi di
HMM. Sotto questo aspetto, la definizione di ‘processo di Markov congiunto’
e la piu economica in termini di dimensioni dello spazio degli stati, mentre
la definizione di ‘funzione deterministica di un processo di Markov’ e la piu
onerosa.
L’espressione ‘il processo stocastico ha un HMM’, utilizzata in preceden-
za e nel seguito, significa che ‘il processo stocastico puo essere rappresentato
attraverso un Hidden Markov Model’.
2.1 Le tre definizioni
La prima di questa definizioni e piuttosto popolare nell’ambito della
statistica.
Definizione 2.1.1. Sia {Yt} un processo stocastico stazionario con valori
in un insieme finito Y. Allora {Yt} ha un HMM del tipo ‘funzione deter-
ministica di una catena di Markov’ se esistono un processo di Markov {Xt}
4

CAPITOLO 2. HMM: TRE DEFINIZIONI, UN UNICO CONCETTO 5
con valori in un insieme finito X = {1, ..., N}, detto spazio degli stati, e una
funzione f : X→ Y tali che Yt = f(Xt).
Figura 2.1: HMM del tipo ‘funzione deterministica di una catena di Markov’.
Nel dettaglio: (a) spazio degli stati X e spazio dei simboli osservabili Y; (b) natu-
ra markoviana del processo nascosto; (c) generazione di natura deterministica dei
simboli osservabili a partire dagli stati nascosti; (d) una particolare realizzazione
dell’HMM in questione.
Si noti che l’esistenza di X ed f non e sempre verificata perche si vuole
uno spazio degli stati finito. Se e permesso uno spazio degli stati di cardi-
nalita infinita, allora si puo sempre costruire un HMM (del tipo ‘funzione
deterministica di una catena di Markov’).
La definizione che segue e invece molto popolare nell’ambito dell’ingeg-
neria.
Definizione 2.1.2. Sia N un numero intero finito. Allora {Yt} ha un HMM
del tipo ‘funzione stocastica di una catena di Markov’ se la legge di {Yt} e
la stessa del processo {Zt} ottenuto come specificato di seguito: esistono un
intero M e una coppia di matrici A ∈ [0, 1]N×N e B ∈ [0, 1]N×M tali che
valgono le proprieta:
1. A e stocastica per righe; in altre parole, ogni riga di A somma a uno.
2. B e stocastica per righe; in altre parole, ogni riga di B somma a uno.

CAPITOLO 2. HMM: TRE DEFINIZIONI, UN UNICO CONCETTO 6
3. Sia π ∈ [0, 1]N un vettore stocastico riga tale che π = πA. Sia {Xt}una catena di Markov con valori in X = {1, ..., N} con matrice di
transizione tra gli stati A e distribuzione iniziale π. Zt viene scelto in
modo aleatorio da M secondo la legge P (Zt = u|Xt = j) = bju.
Figura 2.2: HMM del tipo ‘funzione stocastica di una catena di Markov’. Nel
dettaglio: (a) spazio degli stati X e spazio dei simboli osservabili Y; (b) natura
markoviana del processo nascosto; (c) generazione di natura aleatoria dei simboli
osservabili a partire dagli stati nascosti; (d) particolare realizzazione dell’HMM in
questione.
In questo caso A e B costituiscono la matrice di transizione tra gli stati
e la matrice di output, rispettivamente, dell’HMM.
Infine introduciamo una definizione che si rivela molto utile dal punto
di vista teorico ed e la piu economica in termini di dimensioni dello spazio
degli stati.
Definizione 2.1.3. Sia {Yt} un processo stocastico stazionario sull’alfabeto
finito Y = {1, ...,M}. Il processo {Yt} ha un HMM del tipo ‘processo di
Markov congiunto’ se esiste un altro processo stocastico stazionario {Xt}su uno spazio degli stati finito X = {1, ..., N} tale che valgono le seguenti
proprieta:

CAPITOLO 2. HMM: TRE DEFINIZIONI, UN UNICO CONCETTO 7
1. Il processo congiunto {Xt, Yt} e di Markov. Percio
P(Xt = xt, Yt = yt|Xt−1 = xt−1, Yt−1 = yt−1, Xt−2 = xt−2, ...) =
= P(Xt = xt, Yt = yt|Xt−1 = xt−1, Yt−1 = yt−1).
2. Inoltre, e vero che
P(Xt = xt, Yt = yt|Xt−1 = xt−1, Yt−1 = yt−1) =
= P(Xt = xt, Yt = yt|Xt−1 = xt−1) ,
, m(yt)xt−1xt
.
Figura 2.3: HMM del tipo ‘processo di Markov congiunto’. Nel dettaglio: (a)
spazio degli stati X e spazio dei simboli osservabili Y; (b) natura markoviana del
processo nascosto; (c) visione delle transizioni da stato a stato del processo nascosto
e del processo congiunto.
Dalla definizione e chiaro che
P(Xt = xt|Xt−1 = xt−1, Xt−2 = xt−2, ...) =
= P(Xt = xt|Xt−1 = xt−1).
In altre parole, {Xt} e esso stesso un processo di Markov.
A questo punto e possibile definire le matrici M (u), u ∈ Y, di dimensione
N ×N , aventi come elementi proprio le probabilita m(u)ij . Definendo ora
aij ,∑u∈Y
m(u)ij ∀i, j.

CAPITOLO 2. HMM: TRE DEFINIZIONI, UN UNICO CONCETTO 8
e chiaro che la matrice N ×N avente come elementi i termini aij costituisce
proprio la matrice di transizione tra stati A del processo di Markov nascosto
{Xt}.
2.2 Equivalenza tra le definizioni
Dimostreremo ora che i tre modelli visti in precedenza sono equivalenti.
Lemma 2.2.1. Le seguenti affermazioni sono equivalenti:
1. Il processo {Yt} ha un HMM del tipo ‘funzione deterministica di una
catena di Markov’.
2. Il processo {Yt} ha un HMM del tipo ‘funzione stocastica di una catena
di Markov’.
3. Il processo {Yt} ha un HMM del tipo ‘processo di Markov congiunto’.
Dimostrazione. 1. ⇒ 2. Chiaramente ogni funzione deterministica di una
catena di Markov e anche una funzione ‘stocastica’ della stessa catena di
Markov, con ogni elemento di B uguale a zero o a uno. Per la precisione,
poiche X e Y sono insiemi finiti, la funzione f induce semplicemente una
partizione dello spazio degli stati X in M sottoinsiemi X1, ...,XM dove Xu ,
{j ∈ X : f (j) = u}. Quindi due stati in Xu sono indistinguibili attraverso
il processo di misurazione {Yt}. Poniamo ora bju = 1 se j ∈ Xu e zero
altrimenti.
2. ⇒ 3. Se {Yt} e modellato come un HMM rappresentabile da una
funzione stocastica del processo di Markov con {Xt} nel ruolo di catena
di Markov sottostante, allora il processo congiunto {(Xt, Yt)} e di Markov.
Infatti, se definiamo (Xt, Yt) ∈ X × Y, allora dalle condizioni dell’HMM ne
consegue che
P [(Xt+1, Yt+1) = (j, u) | (Xt, Yt) = (i, v)] = aijbju
Definiamo ora
M (u) := [aijbju] ∈ [0, 1]N×N .
Allora il processo {(Xt, Yt)} e di Markov, con matrice di transizione tra stati
data da M (1) M (2) . . . M (M)
......
......
M (1) M (2) . . . M (M)
.

CAPITOLO 2. HMM: TRE DEFINIZIONI, UN UNICO CONCETTO 9
Infine, si noti che P[(Xt+1, Yt+1) = (j, u)] dipende solo da Xt ma non da Yt.
Percio il processo congiunto {(Xt, Yt)} soddisfa tutte le condizioni richieste
per un modello HMM della tipologia ‘processo di Markov congiunto’.
3.⇒ 1. Sia {Xt} un processo di Markov tale per cui il processo congiunto
{(Xt, Yt)} sia anch’esso di Markov. Allora chiaramente {Yt} = f {(Xt, Yt)}per una funzione f opportuna, corrispondente alla proiezione su {Yt}. Percio
esso e anche un HMM rappresentabile da una funzione deterministica di una
catena di Markov.
2.3 Elementi, notazione e meccanismo di un HMM
Tra le definizioni presentate nelle sezioni precedenti, d’ora in poi con-
sidereremo la seconda definizione, che descrive un HMM come una fun-
zione stocastica di una catena di Markov. Nel seguito verranno quindi es-
posti nel dettaglio gli elementi e il meccanismo di questa tipologia di HMM
particolarmente utilizzata nel mondo dell’ingegneria.
Un HMM del tipo ‘funzione stocastica di una catena di Markov’ e costi-
tuito da diversi elementi; la notazione utilizzata sara la seguente:
• T : lunghezza della sequenza di osservazioni (numero totale di cicli di
clock).
• N : numero di stati (nascosti) nel modello.
• M : numero di distinti simboli osservabili.
• X = {1, 2, ..., N} : spazio degli stati nascosti.
• Y = {1, 2, ...,M} : spazio delle possibili osservazioni.
• π = (π1, π2, ..., πN ) : vettore probabilita degli stati iniziali.
• A =
a11 a12 . . . a1N...
......
...
aN1 aN2 . . . aNN
∈ RN×N : matrice di transizione tra gli
stati, con aij = P (Xt+1 = j|Xt = i).
• B =
ba11 b12 . . . b1M
......
......
bN1 bN2 . . . bNM
∈ RN×M : matrice di output, con

CAPITOLO 2. HMM: TRE DEFINIZIONI, UN UNICO CONCETTO 10
bij = P (Yt = j|Xt = i).
• Xk : variabile aleatoria rappresentante lo stato in cui il sistema si trova
al k-esimo ciclo di clock.
• Yk : variabile aleatoria rappresentante il simbolo osservato al k-esimo
ciclo di clock.
• xk : numero reale indicante lo specifico valore assunto dalla variabile
aleatoria Xk al k-esimo ciclo di clock; ovviamente xk ∈ X ∀k : 1 ≤k ≤ T .
• yk : numero reale indicante lo specifico valore assunto dalla variabile
aleatoria Yk al k-esimo ciclo di clock; ovviamente yk ∈ Y ∀k : 1 ≤k ≤ T .
Per questo tipo di modello faremo le seguenti assunzioni:
1. Gli stati nel modello sono presenti in un numero finito, che denoteremo
con N . Non definiremo rigorosamente cosa sono gli stati, ma diremo
semplicemente che all’interno di uno stato il segnale presenta alcune
proprieta misurabili e distintive.
2. A ogni ciclo di clock, t, si entra in un nuovo stato sulla base di una dis-
tribuzione delle probabilita di transizione che dipende solamente dallo
stato subito precedente (proprieta di Markov). Si noti che la tran-
sizione puo essere tale che il processo rimane nello stato precedente.
Con la notazione introdotta, si ha che:
P(Xt = xt|Xt−1 = xt−1, Xt−2 = xt−2, ...) =
= P(Xt = xt|Xt−1 = xt−1).
3. In seguito ad una transizione viene prodotto un simbolo di output os-
servabile in accordo a una distribuzione di probabilita che dipende sola-
mente dallo stato attuale. Tale distribuzione di probabilita rimane fis-
sa per un determinato stato, per cui ci sono N distribuzioni delle prob-
abilita di osservazione che rappresentano ovviamente variabili aleatorie

CAPITOLO 2. HMM: TRE DEFINIZIONI, UN UNICO CONCETTO 11
o processi stocastici. Formalmente:
P(Y1 = y1, Y2 = y2, ..., Yn = yn|X1 = x1, X2 = x2, ..., Xn = xn) =
= P(Y1 = y1|X1 = x1)P(Y2 = y2|X2 = x2)...P(Yn = yn|Xn = xn) =
=
n∏i=1
P(Yi = yi|Xi = xi).
In altre parole, la sequenza {Yn} e condizionatamente indipendente
dato {Xn}.
Si noti come la terza assunzione permetta di instaurare la seguente
equivalenza:
m(u)ij , P(Yt+1 = u,Xt+1 = j|Xt = i) =
= P(Yt+1 = u|Xt+1 = j,Xt = i)P(Xt+1 = j|Xt = i) =
= [assunzione 3] =
= P(Yt+1 = u|Xt+1 = j)P(Xt+1 = j|Xt = i) =
= aijbju.
Utilizzando il modello, una sequenza di T osservazioni {Y1 = y1, ..., YT = yT },esprimibile nella forma compatta
{Y T1 = yT1
}, e generata nel modo seguente:
1. Si sceglie uno stato iniziale, x1, secondo la distribuzione iniziale π ;
2. Si pone t = 1 ;
3. L’uscita yt si ottiene in accordo con bxtyt , la distribuzione di probabilita
delle osservazioni per lo stato xt ;
4. La transizione allo stato xt+1 all’istante t + 1 e legata ad axtxt+1 , la
distribuzione di probabilita di transizioni tra stati per lo stato xt ;
5. Si pone t = t+ 1 ; si ritorna al punto 3 se t < T ; altrimenti si termina
la procedura.
Nel seguito spesso si utilizzera la notazione compatta λ = (A,B, π) per
rappresentare un HMM. La specificazione di un HMM coinvolge la scelta
di un numero di stati, N , e di un numero di simboli discreti M : la scelta
fatta in sede di spiegazione della notazione di etichettare gli stati con dei
numeri, avendo quindi a che fare con un X = {1, 2, ..., N} piuttosto che
con un X = {x1, x2, ..., xN}, si giustifica quindi col fatto che l’interesse e

CAPITOLO 2. HMM: TRE DEFINIZIONI, UN UNICO CONCETTO 12
per il numero di stati e non per la natura degli stati, e che un’espressione
dello spazio di stato del secondo tipo avrebbe inutilmente appesantito la
notazione.

Capitolo 3
Problemi collegati agli HMM
3.1 I tre problemi per gli HMM
Dato un HMM descritto come nell’ultima parte del precedente capitolo,
esistono tre problemi di interesse che devono essere risolti per il modello per
risultare utile nelle applicazioni del mondo reale. Questi problemi sono i
seguenti:
1. Trovare la probabilita di una sequenza osservata dato un HMM (val-
utazione).
2. Trovare la sequenza di stati nascosti che piu probabilmente ha generato
una sequenza osservata (decodifica).
3. Identificare i parametri (A,B, π) di un HMM data una sequenza di
osservazioni (addestramento).
Il problema di valutazione piu essere tradotto nel seguente modo: data
una sequenza di osservazioni{Y T1 = yT1
}e il modello λ = (A,B, π), si chiede
di calcolare P(Y T1 = yT1 |λ
). Visto in un altro modo, dato il modello e una
sequenza di osservazioni si chiede di valutare il modello. L’ ultimo punto di
vista risulta molto utile: se si pensa al caso in cui si ha a che fare con molti
modelli in competizione, la soluzione al problema 1 consente di scegliere il
modello che si accorda nel miglior modo con le osservazioni. Per calcolare
la probabilita di una sequenza di osservazioni dato un particolare HMM,
e quindi scegliere il piu probabile HMM, possono essere utilizzati in modo
efficiente vari algoritmi ricorsivi, quali il forward, il backward e il forward-
backward.
13

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 14
Il problema di decodifica consiste nel trovare la sequenza di stati piu
probabile date certe osservazioni: data una sequenza di osservazioni{Y T1 = yT1
}si chiede di scegliere una sequenza di stati
{XT
1 = xT1}
che e in un certo sen-
so ottimale. Questo e un tipico problema di stima. Solitamente si usa un
criterio di ottimizzazione per risolvere questo problema nel miglior modo
possibile. Sfortunatamente, come vedremo, ci sono molti possibili criteri di
ottimizzazione che possono essere imposti e quindi la decisione del model-
lo e in forte collegamento con l’uso che si vuol fare della sequenza di stati
nascosti. Un tipico uso della sequenza di stati nascosti e di comprendere
la struttura del modello, e di ottenere medie statistiche, comportamento,
etc. all’interno dei singoli stati. Per determinare la piu probabile sequenza
di stati nascosti data una sequenza di osservazioni si utilizza l’algoritmo di
Viterbi.
Il problema di identificazione consiste nell’aggiustare i parametri del
modello λ = (A,B, π) al fine di massimizzare P(Y T1 = yT1 |λ
). Esso e cru-
ciale per moltissime applicazioni e, senza dubbio, il piu difficile da risolvere.
Qualora le matrici A e B non siano direttamente (empiricamente) misura-
bili, come molto spesso avviene nel caso di applicazioni reali, si utilizza
l’algoritmo forward-backward.
3.2 Problema di valutazione
L’obiettivo del problema di valutazione e di calcolare la probabilita di
una sequenza di osservazioni dato un Hidden Markov Model; si vuole cioe de-
terminare P(Y T1 = yT1
∣∣λ) con ovviamente i parametri del modello (A,B, π)
noti.
3.2.1 Calcolo diretto
Il modo piu diretto per raggiungere tale obiettivo consiste nel numerare
tutte le possibili sequenze di stati di lunghezza T (il numero di osservazioni).
Per ogni singola sequenza {X1 = x1, X2 = x2, ..., XT = xT }, che in forma
compatta puo essere indicata come{XT
1 = xT1}
, la probabilita di osservare
una sequenza{Y T1 = yT1
}e P(Y T1 = yT1 |XT
1 = xT1 , λ), dove
P(Y T1 = yT1 |XT
1 = xT1 , λ)
= bx1y1bx2y2 ...bxT yT

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 15
La probabilita di una tale sequenza di stati XT1 = xT1 , d’altra parte, e data
da
P(XT
1 = xT1 |λ)
= πx1ax1x2ax2x3 ...bxT−1xT
La probabilita congiunta di Y T1 = yT1 e XT
1 = xT1 , cioe la probabilita che
Y T1 = yT1 e XT
1 = xT1 abbiano luogo contemporaneamente, e data semplice-
mente dal prodotto tra i due termini sopra: P(Y T1 = yT1 , X
T1 = xT1 |λ
)=
P(Y T1 = yT1 |XT
1 = xT1 , λ)P(XT
1 = xT1 |λ). La probabilita di Y T
1 = yT1 si ot-
tiene quindi sommando questa probabilita congiunta su tutte le possibili
sequenze di stati:
P(Y T1 = yT1 |λ
)=∑∀xT
1
P(Y T1 = yT1 |XT
1 = xT1 , λ)
P(XT
1 = xT1 |λ)
=∑
∀x1,x2,...,xT
πx1bx1y1ax1x2bx2y2 ...axT−1xT bxT yT
L’interpretazione del calcolo mostrato e la seguente. Inizialmente (all’istante
t = 1) ci si trova nello stato x1 con probabilita πx1 , e viene generato il
simbolo y1 con probabilita bx1y1 . In seguito si compie la transizione allo
stato x2 con probabilita ax1x2 e viene generato il simbolo y2 con probabilita
bx2y2 . Questo processo continua fino a quando avviene l’ultima transizione
dallo stato xT−1 allo stato xT con probabilita axT−1xT e si genera il simbolo
yT con probabilita bxT yT . Una breve riflessione dovrebbe convincere il lettore
che il calcolo di P(Y T1 = yt1|λ
)attraverso il calcolo diretto appena trattato
richiede un numero di calcoli dell’ordine di 2T ·NT , poiche ad ogni istante
t = 1, 2, ..., T ci sono N stati a cui e possibile andare e per ogni addendo
della sommatoria sono richiesti circa 2T calcoli. (Per la precisione, occorrono
(2T − 1))NT moltiplicazioni e NT − 1 addizioni.) Una richiesta del genere
e computazionalmente inattuabile, anche per piccoli valori di N e T ; per
esempio con N = 5 e T = 100 si arriva a un ordine di 2 · 100 · 5100 ≈ 1072
calcoli! Chiaramente e necessaria una procedura piu efficiente in grado di
risolvere il problema 1. Una tale procedura esiste ed e nota col nome di
forward-procedure.
3.2.2 Forward-procedure
In questa sezione verra analizzata la forward-procedure (letteralmente
‘procedura in avanti’), che permette di calcolare la probabilita di una se-
quenza osservata in modo ricorsivo.

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 16
Si consideri la variabile-forward αt(xt) definita come:
αt(xt) , P(Y t1 = yt1, Xt = xt|λ
)rappresentante cioe la probabilita della parziale sequenza di osservazioni
(fino all’istante t) e dello stato xt, dato il modello λ. A questo punto si puo
risolvere il problema attraverso αt(xt) in modo induttivo con la seguente
procedura:
1. α1(x1) = πx1bx1y1 1 ≤ x1 ≤ N
2. per t = 1, 2..., T − 1 1 ≤ xt+1 ≤ N
αt+1(xt+1) =
(N∑
xt=1
αt(xt)axtxt+1
)bxt+1yt+1
3. infine, P(Y T1 = yT1 |λ
)=∑N
xT=1 αT (xT ) .
Figura 3.1: Sequenza di operazioni richieste per il computo della variabile-forward
αt+1(j).
Il passo 1 da inizio alle probabilita-forward con la probabilita congiunta
dello stato X1 = x1 e dell’osservazione iniziale Y1 = y1.
Il passo 2 consiste nel tener conto di come lo stato xt+1 possa essere rag-
giunto dagli N possibili stati xt, xt = 1, 2, ..., N , all’istante t. Poiche αt(xt)

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 17
e la probabilita congiunta di osservare la sequenza Y t1 = yt1 e di trovarsi
nell’istante t nello stato xt, allora il prodotto αt(xt)axtxt+1 e la probabilita
congiunta di osservare la sequenza Y t1 = yt1 e di trovarsi nell’istante t + 1
nello stato xt+1 giungendo dallo stato xt. Sommando questo prodotto su
tutti gli N possibili stati xt all’istante t, con xt = 1, 2, ..., N , si ottiene la
probabilita di trovarsi in xt+1 all’istante t + 1 e, congiuntamente, di aver
osservato la parziale sequenza di osservazioni suddetta (probabilita totale).
Fatto cio e noto xt+1, e facile constatare che αt+1(xt+1) si ottiene moltipli-
cando la somma appena vista per la probabilita di osservare Yt+1 = yt+1
dato lo stato Xt+1 = xt+1, vale a dire bxt+1yt+1 .
Infine il passo 3 permette di calcolare P(Y T1 = yT1 |λ
)attraverso la sem-
plice somma delle variabili-forward finali αT (xT ). Esso consiste infatti nel-
l’applicazione del teorema della probabilita totale: poiche gli eventi XT =
1, XT = 2, ..., XT = N sono disgiunti e formano una partizione dello spazio
campionario, si ha che:
P(Y T1 = yT1 |λ) = =
N∑i=1
P(Y T1 = yT1 , XT = i|λ)
dove appunto P(Y T1 = yT1 , XT = i|λ) costituisce αT (i).
Se si vuole esaminare la complessita di computazione richiesta dalla pro-
cedura si vede che per il calcolo di αt(xt), per 1 ≤ t ≤ T e 1 ≤ xt ≤ N ,
e richiesto un numero di calcoli dell’ordine di N2T , contro i 2TNT richi-
esti dal calcolo diretto. (Per la precisione, occorrono N(N + 1)(T − 1) +N
moltiplicazioni e N(N−1)(T −1) addizioni.) Per N = 5, T = 100 occorrono
circa 3000 computazioni per la forward-procedure contro i 1072 per il calcolo
diretto, un risparmio di circa 69 ordini di grandezza!
3.2.3 Backward-procedure
La probabilita di una sequenza osservata puo essere calcolata anche me-
diante la backward-procedure (letteralmente ‘procedura all’indietro’), un
modo analogo, e per certi versi duale, alla forward-procedure appena vista.
Definiamo la variabile βt(xt):
βt(xt) , P(Y Tt+1 = yTt+1|Xt = xt, λ)
rappresentante la probabilita di una sequenza di osservazioni parziale dal-
l’istante t + 1 fino alla fine, dati lo stato xt all’istante t e il modello λ. Si
puo trovare βt(xt) per ogni istante e per ogni stato in modo induttivo:

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 18
1. βT (xT ) = 1 1 ≤ xT ≤ N
2. per t = T − 1, T − 2, ..., 1 1 ≤ xt+1 ≤ N
βt(xt) =
N∑xt+1=1
axtxt+1bxt+1yt+1
3. infine, P(Y T1 = yT1 |λ
)=∑N
x1=1(β1(x1)πx1) .
Figura 3.2: Sequenza di operazioni richieste per il computo della variabile-backward
βt(i).
Il passo 1 definisce in modo arbitrario βT (xT ) qualsiasi sia xT .
Il passo 2 mostra che per essere nello stato xt all’istante t e per tener conto
del resto della sequenza di osservazioni si deve compiere una transizione
ad ognuno degli N possibili stati all’istante t + 1, tener conto del simbolo
osservato yt+1 all’istante t+ 1 e infine considerare il resto della sequenza di
osservazioni.
Il passo 3 consiste nell’applicazione del teorema della probabilita totale:
poiche gli eventi X1 = 1, X1 = 2, ..., X1 = N sono disgiunti e formano una
partizione dello spazio campionario, si ha che:
P(Y T1 = yT1 |λ) =
= P(Y T1 = yT1 , X1 = 1|λ) + P(Y T
1 = yT1 , X1 = 2|λ) + ...+ P(Y T1 = yT1 , X1 = N |λ) =
= P(Y T1 = yT1 |X1 = 1, λ)P(X1 = 1|λ) + ...+ P(Y T
1 = yT1 |X1 = N,λ)P(X1 = N |λ)

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 19
dove appunto P(Y T1 = yT1 |X1 = i, λ)P(X1 = i|λ) costituisce β1(i) e i termini
P (X1 = i|λ) sono rappresentati da πi.
Ancora una volta il calcolo di βt(xt) per 1 ≤ t ≤ T e 1 ≤ xt ≤ N richiede
un numero di calcoli dell’ordine di N2T .
3.2.4 Forward-backward procedure
Infine il problema di valutazione puo essere risolto con una procedura che
utilizza entrambe le variabili forward e backward precedentemente definite.
L’idea e di utilizzare ancora una volta il teorema della probabilita totale,
applicato sui valori assunti dalla variabile Xt al generico istante t. Supponi-
amo dunque che il processo di Markov nascosto assuma nell’istante t il valore
xt. Si ha che:
P(Y1 = y1, Y2 = y2, ..., YT = yT , Xt = xt|λ) =
= P(Y t1 = yt1, Y
Tt+1 = yTt+1, Xt = xt|λ) =
= P((Y t1 = yt1, Xt = xt), Y
Tt+1 = yTt+1|λ) =
= P(Y t1 = yt1, Xt = xt|λ)P(Y T
t+1 = yTt+1|Y t1 = yt1, Xt = xt, λ) =
= P(Y t1 = yt1, Xt = xt|λ)P(Y T
t+1 = yTt+1|Xt = xt, λ)
dove a questo punto il primo fattore coincide con αt(xt) e il secondo con
βt(xt).
Per la probabilita totale:
P(Y T1 = yT1 |λ) =
=
N∑xt=1
P(Y T1 = yT1 , Xt = xt|λ) =
=N∑
xt=1
[αt(xt)βt(xt)]
3.3 Problema di decodifica
Il problema di decodifica consiste nel trovare la piu probabile sequenza
di stati nascosti: preso un HMM, si vuole determinare da una sequenza di
osservazioni la sequenza di stati nascosti sottostante che piu probabilmente
potrebbe averla generata.
Si puo trovare la sequenza piu probabile di stati nascosti elencando tutte
le possibili sequenze di stati nascosti e trovando la probabilita della sequenza

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 20
osservata per ogni combinazione. La sequenza piu probabile di stati nascosti
XT1 = xT1 sara tale che:
xT1 = arg maxx1,x2,...,xT
P(Y T1 = yT1 |XT
1 = xT1 , λ)
Questa via e praticabile, ma trovare la sequenza piu probabile calcolando in
modo esaustivo ogni combinazione e computazionalmente molto dispendioso.
Come nella forward-procedure, si puo sfruttare la tempo invarianza delle
probabilita per ridurre la complessita del calcolo.
3.3.1 Riduzione della complessita attraverso la ricorsione
Vediamo ora come trovare in modo ricorsivo la piu probabile sequenza
di stati nascosti data una sequenza di osservazioni e un HMM.
Lo scopo e di trovare la sequenza di stati ottimale associata ad una data
sequenza di osservazioni. Poiche vi sono molti possibili criteri di ottimiz-
zazione, esistono molteplici modi per risolvere tale questione. Uno dei pos-
sibili criteri di ottimizzazione e di scegliere gli stati xt al variare dell’istante
t che sono singolarmente i piu probabili.
In tale direzione risulta utile definire la variabile γt(xt):
γt(xt) , P(Xt = xt|Y T1 = yT1 , λ)
indicante la probabilita di trovarsi nello stato xt all’istante t, data l’intera
sequenza di osservazioni e il modello λ. Una breve riflessione porta a verifi-
care che γt(xt) e banalmente esprimibile in funzione della variabile forward
α·(·) e della variabile backward β·(·) nel seguente modo:
γt(xt) =αt(xt)βt(xt)
P(Y T1 = yT1 |λ)
poiche αt(xt) tiene conto delle osservazioni Y1 = y1, Y2 = y2, ..., Yt = yt e del-
lo statoXt = xt, mentre βt(xt) considera Yt+1 = yt+1, Yt+2 = yt+2, ..., YT = yT
dato lo stato Xt = xt. Il denominatore P(Y T1 = yT1 |λ) costituisce sem-
plicemente il fattore di normalizzazione, rendendo γt(xt) una probabilita
condizionata, soddisfacente quindi∑N
xt=1 γt(xt) = 1.
Utilizzando γt(xt), lo stato individualmente piu probabile xt all’istante
t e:xt = arg max
xt=1,2,...,N[γt(xt)] 1 ≤ t ≤ T

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 21
Potrebbero tuttavia esserci dei problemi con il criterio e la soluzione visti
sopra. Quando ci sono transizioni non permesse, ovvero axtxt+1 = 0 per
qualche xt e xt+1, la sequenza di stati ottenuta potrebbe essere infatti una
sequenza di stati impossibile. La soluzione proposta infatti determina sem-
plicemente lo stato piu probabile di volta in volta senza considerare la strut-
tura globale del traliccio, gli stati raggiungibili da uno stato, e la lunghezza
della sequenza di osservazioni. Comunque e ancora utile dal momento che
nella pratica simili situazioni indesiderabili non sempre avvengono.
Lo svantaggio dell’approccio trattato e quindi la necessita di vincoli
globali di qualche tipo sulla sequenza di stati ottimale trovata. Quasi ba-
nalmente, un criterio di ottimizzazione di questo tipo e trovare il miglior
cammino singolo con la piu alta probabilita, ovvero massimizzare P(Y T1 =
yT1 , XT1 = xT1 |λ). Una tecnica formale per trovare questa miglior sequenza
di stati singola esiste ed e nota col nome di algoritmo di Viterbi.
3.3.2 Algoritmo di Viterbi
I passi formali nell’algoritmo di Viterbi per trovare la singola sequenza
di stati migliore sono i seguenti:
1. Inizializzazione.
δ1(x1) = πx1bx1y1 1 ≤ x1 ≤ N
ψ1(x1) = 0
2. Ricorsione.
Per 2 ≤ t ≤ T e 1 ≤ xt ≤ N
δt(xt) = max1≤xt−1≤N
[δt−1(xt−1)axt−1xt ]bxtyt
ψt(xt) = arg max1≤xt−1≤N
[δt−1(xt−1)axt−1xt ]
3. Fine.P = max
1≤xT≤N[δT (xT )]
xT = arg max1≤xT≤N
[δT (xT )]
4. Cammino all’indietro.
Per t = T − 1, T − 2, ..., 1
xt = ψt+1(xt+1)

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 22
L’algoritmo di Viterbi e simile, a parte i passi di cammino all’indietro, alla
procedura forward-backward; la differenza piu sostanziale riguarda la mas-
simizzazione, non piu la somma, sugli stati precedenti. Ancora una volta
una struttura a traliccio implementa in modo efficiente la computazione.
3.4 Problema di addestramento
Il terzo problema consiste nell’aggiustare i parametri del modello (A,B, π)
al fine di massimizzare P(Y T1 = yT1 |λ), la probabilita di una sequenza di os-
servazioni dato il modello. Questo e senza dubbio il problema piu complesso
dei tre che abbiamo trattato. Non vi e alcuna via nota per risolvere un
problema di massima verosimiglianza in modo analitico. Il risultato e tut-
tavia ottenibile mediante metodi di discesa del gradiente ottenendo quindi
un minimo (massimo) locale e non globale. Molto spesso la computazione
del gradiente e piuttosto difficoltosa, per cui la discesa avviene mediante
algoritmi approssimati come il random direction descent o il line search.
L’algoritmo piu utilizzato, che comunque fornisce massimi locali, e basato
su Expectation-Maximization o semplicemente EM, ed e il Baum-Welch.
Prima di affrontare l’algoritmo di Baum-Welch, definiamo ξt(xt, xt+1)
come la probabilita di essere nello stato xt al tempo t e nello stato xt+1 al
tempo t+ 1, dati modello ed osservazioni; formalmente:
ξt(xt, xt+1) , P(Xt = xt, Xt+1 = xt+1|Y T1 = yT1 , λ).
Possiamo esprimere questa probabilita come:
ξt(xt, xt+1) =αt(xt)axtxt+1bxt+1yt+1βt+1(xt+1)
P(Y T1 = yT1 , λ)
dove αt(xt) tiene conto delle prime t osservazioni terminando allo stato xt al
tempo t, il termine axtxt+1bxt+1yt+1 coincide con la transizione allo stato xt+1
all’istante t + 1 e dell’occorrenza del simbolo osservabile yt+1, e βt+1(xt+1)
tiene conto della rimanente parte della sequenza di osservazioni. Il denom-
inatore P(Y T1 = yT1 |λ) =
∑xt
∑xt+1
αt(xt)axtxt+1bxt+1yt+1βt+1(xt+1) serve
per normalizzare ξt(xt, xt+1).
Ricordando la definizione di γt(xt) come la probabilita di essere nel-
lo stato xt al tempo t, possiamo scrivere γt(xt) in funzione di ξt(xt, xt+1)

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 23
Figura 3.3: Sequenza di operazioni richieste per il computo della variabile ξt(i, j).
sommando ξt(xt, xt+1) tra tutti i possibili xt+1:
γt(xt) =N∑
xt+1=1
ξt(xt, xt+1)
Se si somma γt(i) sopra l’indice di tempo t si ottiene una quantita inter-
pretabile con il numero atteso di volte (nel tempo) che lo stato i viene
visitato o, equivalentemente, il numero atteso di transizioni fatte dallo stato
i nella somma se si esclude l’ultimo istante, T . Analogamente, sommando
ξt(i, j) su t (da t = 1 a t = T ) si ottiene il numero atteso di transizioni dallo
stato i allo stato j. In formule:
T−1∑t=1
γt(i) = valore atteso di transizioni fatte da i
T−1∑t=1
ξt(i, j) = valore atteso di transizioni dallo stato i allo stato j
Utilizzando queste formule e il concetto di conteggio delle occorrenze di un
evento si puo utilizzare il metodo di Baum-Welch per ottenere una stima
migliore dei parametri dell’HMM.
3.4.1 Metodo di Baum-Welch
Le formule per ottenere iterativamente una stima migliore dei parametri
λ′ = (A′, B′, π′) partendo da una precedente stima λ = (A,B, π) sono:

CAPITOLO 3. PROBLEMI COLLEGATI AGLI HMM 24
1.π′i = probabilita di essere nello stato i all’istante t = 1
= γ1(i)
2.
a′ij =valore atteso di transizioni dallo stato i allo stato j
valore atteso di transizioni dallo stato i
=T−1∑t=1
ξt(i, j)/T−1∑t=1
γt(i)
3.
b′jk =valore atteso di volte nello stato j e simbolo osservato k
valore atteso di volte nello stato j
=T∑
t=1 , Yt=k
γt(j)/T∑t=1
γt(j)
A questo punto delle due l’una:
• Il modello iniziale λ = (A,B, π) definisce un punto critico della fun-
zione di verosimiglianza, nel qual caso λ′ = λ.
• Il modello λ′ e piu probabile, nel senso che P(Y T1 = yT1 |λ′) > P(Y T
1 =
yT1 |λ). In altre parole, il nuovo modello λ′ = (A′, B′, π′) ha con maggior
probabilita prodotto la sequenza di osservazioni.
In conclusione, se si usa iterativamente λ′ al posto di λ e si esegue una nuova
stima, si puo migliorare la probabilita delle osservazioni a partire dal modello
fino al raggiungimento di un certo punto limite. Il risultato ottenuto sara la
miglior stima del modello.

Capitolo 4
Esempi di applicazione degli
HMM
4.1 Riconoscimento vocale
Il primo esempio si rifa al lavoro di Rabiner e Juang [1]: gli HMM ven-
gono utilizzati per costruire un riconoscitore di singole parole. Utilizzando
una notazione simile a quella vista nei capitoli precedenti, supponiamo di
avere un vocabolario di N parole da riconoscere. A disposizione si hanno un
training set di M simboli osservabili per ogni parola (pronunciata da una o
piu persone) e un test set indipendente.1 Per poter avere un riconoscimento
vocale si eseguono i seguenti punti:
1. Si costruisce un HMM per ogni parola nel vocabolario. Si utilizzano le
osservazioni dall’insieme di M simboli per stimare i parametri ottimi
per ogni parola, ottenendo cosı il modello λn per l’ n-esima parola del
vocabolario, 1 ≤ n ≤ N .
2. Per ogni parola sconosciuta del test set, caratterizzata da una sequen-
za di osservazioni Y1 = y1, Y2 = y2, ..., YT = yT , e per ogni modello di
parola, λn, si calcola Pn = P(Y T1 = yT1 |λn) secondo la procedura vista
nel capitolo 3.
3. Si sceglie la parola il cui modello ha probabilita maggiore:
n = arg max1≤n≤N
Pn
1Il training set e l’insieme di esempi utilizzati per addestrare il sistema, mentre il test
set e l’insieme di esempi utilizzati per valutare le prestazioni del sistema.
25

CAPITOLO 4. ESEMPI DI APPLICAZIONE DEGLI HMM 26
Struttura della catena di Markov Per il riconoscimento della parola
nel caso in cui gli istanti di inizio e fine pronuncia siano approssimativamente
noti risulta vantaggioso utilizzare un HMM con matrice di transizione tra
gli stati non completa.
Cio e reso possibile dal fatto che per la pronuncia delle singole parole la
natura progressiva della sequenza di stati e abbastanza univoca e il numero
di stati necessari per ogni modello di parola e solitamente maneggevole.
Se l’obiettivo fosse quello di modellare un segnale vocale corrispondente
ad un’intera conversazione tali semplificazioni sul modello potrebbero non
essere adeguate.
Facendo corrispondere molto semplicemente gli stati ai suoni presenti
nella parola, e chiaro che la natura sequenziale del processo di cambiamento
dei suoni pronunciati ritrova una perfetta corrispondenza nella struttura
markoviana attraverso cui si cerca di modellarli.
Informazione di durata Poiche gli HMM permettono di eseguire una
vera e propria segmentazione (utilizzando la soluzione al problema 2), al
fine di riconoscere la parola risulta molto utile l’analisi della permanenza,
in termini di tempo, in un certo stato. Essendo approssimativamente noti
gli istanti iniziale e finale della pronuncia della parola, per ogni modello
di parola tale informazione di durata e spesso rappresentata in una forma
normalizzata: Pj(I|T ) equivale alla probabilita di essere nello stato j per
esattamente gli I/T della parola, dove T e il numero di frame nella parola
e I il numero di frame spesi nello stato j.
4.2 Computer Vision
Oltre che nel campo della speech recognition gli HMM risultano molto
utili anche in diverse applicazioni di Computer Vision. L’approccio basato
sugli HMM fornisce un’intrinseca sequenzialita temporale alla rappresen-
tazione del sistema e si e dimostrato efficace, per esempio, per il riconosci-
mento di modelli spaziali 1- o 2-D: la flessibilita data dall’addestramento per-
mette al modello di apprendere le dinamiche che sottendono effettivamente
i dati piuttosto che quelle immaginate dal programmatore.
Una possibile applicazione potrebbe essere il riconoscimento della po-
sizione di un viso posto di fronte ad una webcam, come descritto nell’elabo-

CAPITOLO 4. ESEMPI DI APPLICAZIONE DEGLI HMM 27
rato di Belardinelli [5], che prende spunto dal lavoro di Rao, Schon, Meltzoff
[6].
Segmentazione Il primo problema da affrontare e l’identificazione del-
la zona dei frame contenente il viso da seguire. Per poter individuare in
maniera automatica questa zona, isolandola dallo sfondo e da altri elementi
presenti sulla scena, si procede alla segmentazione dei frame di interesse:
questa operazione separa gruppi di oggetti in partizioni tali che gli elementi
all’interno di un cluster siano il piu vicini possibile gli uni agli altri e il piu
lontano possibile dagli elementi degli altri cluster.
Metrica per i movimenti Una volta individuato l’oggetto da seguire
ci si pone il problema di introdurre una metrica adatta alla descrizione
degli spostamenti, al fine di ottenere dei dati che rappresentino in maniera
consistente le dinamiche oggetto dell’apprendimento. Si puo quindi scegliere
di constatare gli spostamenti relativi dell’oggetto segmentato ad intervalli
regolari in ogni video.
Modellazione con HMM A questo punto si possono individuare gli el-
ementi costitutivi di un HMM rispetto al sistema in esame: gli stati sono
costituiti da un insieme di movimenti della testa discretizzati, per esempio:
fermo, destra, destra-in alto, alto, sinistra-in alto, sinistra, sinistra-in bas-
so, in basso, destra-in basso; le osservazioni possono essere costituite da
una coppia di simboli dell’alfabeto {+,−,=} indicanti la variazione rispetto
all’asse x e rispetto all’asse y rispetto al frame precedente; la matrice di
transizione potrebbe essere inizializzata privilegiando lo stato di immobilita
e le traslazioni verso destra e verso sinistra, ritenute gli stati piu frequenti; la
matrice di output parimenti puo essere inizializzata assegnando, per esempio,
una probabilita piu alta alla coppia (−,=), corrispondente ad una’avvenu-
ta traslazione verso sinistra, qualora lo stato che l’ha prodotta sia appunto
quello corrispondente alla posizione ‘a sinistra’; distribuzione di probabilita
a priori degli stati si puo assumere, per esempio, con una componente piu
elevata per una zona centrale e con componenti piu basse per gli angoli.
Addestramento Infine la fase di addestramento consiste in una prima
operazione di stima delle matrici delle transizioni e di output, per esempio
con il calcolo del Maximum Likelihood delle stesse partendo dalle matrici

CAPITOLO 4. ESEMPI DI APPLICAZIONE DEGLI HMM 28
viste sopra ed basandosi sulla sequenza di emissioni (derivate dal vettore di
spostamenti prodotto dalla segmentazione) e sulla sequenza di stati effettiva
(desunti per ispezione visiva dalla sequenza di frame), e, come seconda oper-
azione, la fase di vero addestramento delle matrici in base a un training set
che si suppone dato, utilizzando per esempio uno stimatore Maximum Like-
lihood dei parametri del modello che fa uso dell’algoritmo di Baum-Welch e
fornendo come parametri iniziali le matrici trovate con l’operazione di stima.
4.3 Biologia
Gli HMM applicati al data mining 2 sono spesso usati nella bioinformat-
ica. Nel seguito prenderemo in considerazione l’attivita di riconoscimento e
confronto di sequenze proteiche, ben descritto nell’elaborato di Marin [3].
Una proteina e descritta da una sequenza di amminoacidi, che costitu-
iscono un alfabeto di simboli finito. Tuttavia, da una parte non siamo certi
che le sequenze di amminoacidi che studiamo non contengano errori, dall’al-
tra accade talvolta che un amminoacido, su due proteine con la medesima
funzione, possa prendere il posto di un altro.
Database mining e classificazione Se prendiamo un modello HMM ad-
destrato possiamo utilizzarlo per trovare in un database sequenze simili a
quelle utilizzate per l’addestramento: poiche tutte le proteine di una stessa
famiglia sono associate ad una sequenza di amminoacidi simile, risulta possi-
bile addestrare un modello su un training set di sequenze note appartenenti
ad una stessa famiglia e quindi ricercare in una sequenza di amminoacidi (o
un suo frammento) la codifica di proteine appartenenti alla stessa famiglia
con un certo grado di probabilita.
Per quanto riguarda la classificazione e possibile addestrare un modello
per ogni famiglia di proteine, e quindi associare alla sequenza di amminoaci-
di una probabilita di appartenenza ad una certa famiglia. In questo caso
il problema e quello di disporre di un training set sufficientemente ampio
da rendere significativa questa operazione. Si supponga di avere N classi di
oggetti all’interno di un database, con N incognito. Si ha una rappresen-
tanza sufficiente come training set per M classi di oggetti; a questo punto si
2Per data mining si intende il processo di estrazione di un sapere o di una conoscenza
a partire da grandi quantita di dati (attraverso metodi automatici o semi-automatici) e
l’utilizzazione industriale o operativa di questo sapere.
CAPITOLO 4. ESEMPI DI APPLICAZIONE DEGLI HMM 29
effettua l’addestramento di M modelli, ciascuno con il training set associato
ad una delle classi note. Risulta ora possibile sia classificare le sequenze di
amminoacidi presenti nel database in base agli M modelli noti, sia raggrup-
pare le rimanenti sequenze non classificate in base agli score (normalizzati)
ottenuti; l’idea e che se due sequenze di amminoacidi ottengono punteggi
simili sugli stessi modelli, allora e probabile che appartengano ad una stessa
famiglia. Naturalmente maggiore e il numero M di classi noti nel training
set, migliori saranno i risultati derivanti dall’applicazione di questa tecnica.
Vediamo ora due esempi specifici.
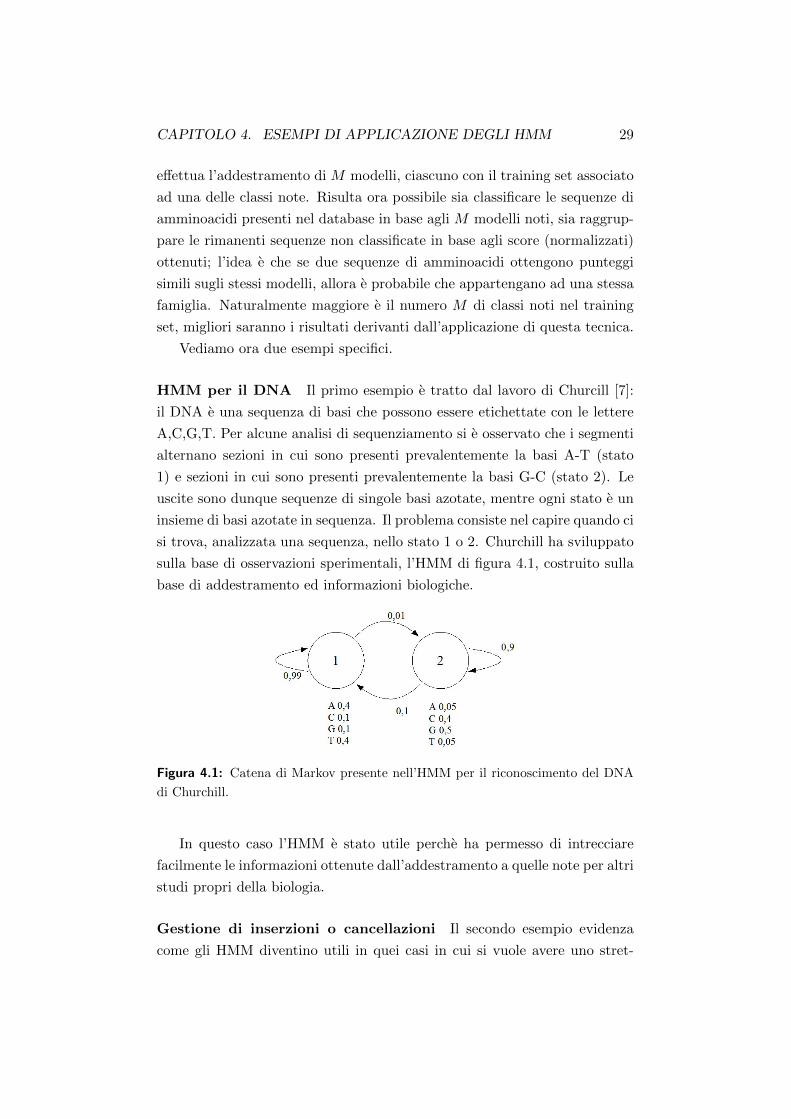
HMM per il DNA Il primo esempio e tratto dal lavoro di Churcill [7]:
il DNA e una sequenza di basi che possono essere etichettate con le lettere
A,C,G,T. Per alcune analisi di sequenziamento si e osservato che i segmenti
alternano sezioni in cui sono presenti prevalentemente la basi A-T (stato
1) e sezioni in cui sono presenti prevalentemente la basi G-C (stato 2). Le
uscite sono dunque sequenze di singole basi azotate, mentre ogni stato e un
insieme di basi azotate in sequenza. Il problema consiste nel capire quando ci
si trova, analizzata una sequenza, nello stato 1 o 2. Churchill ha sviluppato
sulla base di osservazioni sperimentali, l’HMM di figura 4.1, costruito sulla
base di addestramento ed informazioni biologiche.
Figura 4.1: Catena di Markov presente nell’HMM per il riconoscimento del DNA
di Churchill.
In questo caso l’HMM e stato utile perche ha permesso di intrecciare
facilmente le informazioni ottenute dall’addestramento a quelle note per altri
studi propri della biologia.
Gestione di inserzioni o cancellazioni Il secondo esempio evidenza
come gli HMM diventino utili in quei casi in cui si vuole avere uno stret-

CAPITOLO 4. ESEMPI DI APPLICAZIONE DEGLI HMM 30
to controllo sulle penalita da assegnare alle inserzioni o alle cancellazioni
nel riconoscimento della sequenza. Intuitivamente con gli HMM riusciamo
a trattare variazioni diverse sui pattern in modo diverso, e questo li rende
estremamente flessibili. Una proteina e codificata da amminoacidi che cos-
tituiscono un alfabeto di venti simboli: per ragioni biologiche, ma anche
per errori nel campionamento, due proteine con medesima funzione possono
differire nella loro sequenza per:
• sostituzione di un amminoacido con uno simile (tabelle di sostituzione
danno il grado di similarita degli amminoacidi);
• inserzione di un amminoacido;
• eliminazione di un amminoacido.
Naturalmente piu dissimilarita presentano due sequenze, meno probabilita
vi e che appartengano alla stessa famiglia di proteine. Una tecnica consiste
nel definire per ogni Matching anche uno stato di cancellazione e uno di
inserzione. Per ogni transizione verso questi stati si definiscono probabilita
basse; inoltre per gli stati di Matching e di inserzione si definiscono le prob-
abilita di emissione di amminoacidi per quella famiglia di proteine. Per ogni
prolungamento della sequenza da riconoscere si aggiungono al modello 49
parametri (20 probabilita di emissione per lo stato M, 20 per lo stato D, piu
9 probabilita di transizione).
Questo modello e molto flessibile: ad esempio e noto che le inserzioni
all’inizio della sequenza sono meno gravi di quelle centrali (potrebbe trattarsi
di un problema sperimentale di allineamento), e questo puo essere modellato
evitando di penalizzare con basse probabilita le transizioni verso lo stato 0.

Capitolo 5
Conclusioni
I principali vantaggi dell’impiego degli HMM in task relativi al data
mining sono legati da una parte al robusto impianto statistico-teorico che
sostiene gli algoritmi forniti, dall’altro alla relativa efficienza degli stessi.
Inoltre questi modelli si rivelano utili in molte applicazioni poiche:
• effettuano matching di sequenze che differiscono per qualche inseri-
mento o cancellazione, con valutazione della relativa penalita;
• trattano agevolmente sequenze di lunghezza variabile;
• possono svolgere compiti di allineamento, data mining/classificazione,
analisi strutturale e pattern discovery.
I principali limiti nell’applicazione degli HMM sono essenzialmente due. In
primo luogo i parametri da stimare crescono velocemente con il numero di
stati del modello iniziale, e con l’alfabeto in input. Questo oltre a portare
problemi relativi al tempo di calcolo, introduce anche serie difficolta negli
algoritmi di training dovute al moltiplicarsi di massimi locali. Il secondo
problema e che le probabilita di transizione non dipendono dalla funzione di
emissione, ma solo dallo stato nascosto. Una classica correlazione che non
puo essere colta dagli HMM e la seguente: supponiamo che lo stato Xt = i
nel caso in cui emetta Yt = j sia sovente seguito dallo stato Xt+1 = k con
emissione Yt+1 = l e che, analogamente per altre due coppie stato-uscita, lo
stato Xt′ = i′ nel caso in cui emetta Yt′ = j′ sia sovente seguito dallo stato
Xt′+1 = k′ con emissione Yt′+1 = l′: purtroppo questo chiaramente esula
dalle capacita rappresentative degli HMM fin qui approfonditi, in quanto
viene contro l’ assunzione fatta nel capitolo 2 a pagina 10 di dipendenza di
31

CAPITOLO 5. CONCLUSIONI 32
un’uscita dal solo stato attuale. Cio impedisce di scrivere m(u)ij attraverso
il prodotto aijbju; tuttavia adottando le probabilita m(u)ij l’idea base degli
algoritmi di risoluzione dei vari problemi rimane ancora valida.

Bibliografia
[1] L.R. Rabiner e B.H. Juang, An introduction to hidden Markov models,
IEEE ASSp Mag., vol. 3, n.1, pp. 4-16, 1986.
[2] M. Vidyasagar, The Complete Realization Problem for Hidden Markov
Models: A Survey and Some New Results, pp. 10-14, 2009.
[3] A. Marin, Hidden Markov Models e applicazioni al Data Mining, pp.
4-11, 2006, Universita Ca’ Foscari di Venezia.
[4] S.J. Russell, P. Norvig, Intelligenza artificiale. Un approccio moderno.,
seconda edizione Pearson, pp. 173-191, 2005.
[5] A. Belardinelli, Apprendimento di movimenti della testa tramite Hid-
den Markov Model, pp. 80-90, 2006, Universita degli studi di Roma ‘La
Sapienza’.
[6] R.P.N. Rao, A.P. Shon, A.N. Meltzoff, A Bayesian Model of Imitation
in Infants and Robots, in ‘Imitation in Robots, Humans, and Animals:
Behavoiural, Social and Communicative Dimensions’, K.Dautenham and
C.Nehaniv (eds), Cambridge University Press, 2004.
[7] G.A. Churchill, Stochastic models for heterogeneus dna sequences, Bull
Math Biol 51, pp. 79-94, 1989.
33

Ringraziamenti
Desidero porgere i miei ringraziamenti al prof. Lorenzo Finesso per il
tempo dedicatomi e per l’interesse che ha saputo trasmettermi per questa
materia.
Dato che terminato il triennio ognuno prendera una diversa strada, voglio
ringraziare Davide, Colla e Frack per gli indimenticabili momenti passati in-
sieme in questi anni. Questa prima parte del cammino universitario sarebbe
stata per me molto piu dura (e noiosa) se non avessi avuto il loro aiuto e la
loro amicizia.
Infine ringrazio la mia famiglia: i miei genitori per essermi stati sempre
vicini e mio fratello Andrea per il punto di riferimento che mi offre.
Marco Ruzza
34
























![Aleatoriedad Deterministica Aplicaciones MC Computacional - CC063 MÉTODO: generadores de números pseudo-aleatorios (3) 7 Esta regla produce enteros en rango [0,M-1]. Cuando un entero](https://img.dokumen.tips/doc/110x75/5bb3d73c09d3f2734f8cc8a5/aleatoriedad-deterministica-aplicaciones-mc-computacional-cc063-metodo-generadores.jpg)




