Embed Size (px)
Citation preview

UNIVERSIDAD POLITECNICA DE MADRID
ESCUELA TECNICA SUPERIOR
DE INGENIEROS DE TELECOMUNICACION
TRABAJO FIN DE MASTER
MASTER UNIVERSITARIO EN INGENIERIA DE
TELECOMUNICACION
DISENO DE UN ALGORITMO DE CORRECCION DE ERRORES DE
ALINEAMIENTO DE RADARES DE TIPO SECUNDARIO PARA REDES
DE VIGILANCIA DE TRAFICO AEREO
ANDER DONCEL LLAMAS
ENERO 2018


Trabajo Fin de Master
Tıtulo : Diseno de un Algoritmo de Correccion de Errores de Alineamiento de Radares de
Tipo Secundarios para Redes de Vigilancia de Trafico Aereo
Autor : Ander Doncel Llamas
Tutor : Gonzalo de Miguel Vela
Tribunal
Presidente :
Secretario :
Vocal :
Suplente :
y habiendo obtenido la siguiente calificacion:
Calificacion:
Madrid, a de de 2017


Resumen
En el desarrollo de este Trabajo de Fin de Master se lleva a cabo el diseno e implementacion
de un algoritmo de estimacion y correccion de los sesgos de medida de radares de tipo secunda-
rios (SSR) con el fin de evitar un posible funcionamiento incorrecto de un sistema de vigilancia
aerea en entornos de supervision multirradar.
En primer lugar, se implementa un entorno de simulacion que permite la definicion arbi-
traria de escenarios aereos y la generacion de datos radar en base a un determinado modelo
matematico de errores conocido. La utilizacion de este tipo de datos sera necesaria para veri-
ficar el correcto funcionamiento de los algoritmos que componen el sistema de procesado de
datos y alineamiento de trayectorias implementado.
Por otro lado, se comprobara que el sistema opera correctamente cuando los datos analizados
se correspondan a medidas de radares reales. A partir de los resultados obtenidos, quedara pro-
bado que el modelo matematico de errores escogido se adapta considerablemente a la realidad
y que, por tanto, el algoritmo de estimacion de sesgos y alineamiento de trayectorias implemen-
tado es valido para su utilizacion en entornos reales.
Por ultimo, se implementara un filtro de seguimiento a partir de la teorıa de los filtros Interac-
ting Multiple Model (IMM) para realizar la fusion de las medidas procedentes de los diferentes
radares con coberturas solapadas del escenario y llevar a cabo el seguimiento de las trayectorias
de las aeronaves. De esta manera, se posibilitara la vision de las trayectorias finales a mostrar
en la pantalla del controlador aereo con el objetivo de verificar el correcto funcionamiento del
sistema de alineamiento de trayectorias implementado.
Palabras Clave
Gestion de trafico aereo, Control de trafico aereo, Seguimiento de blanco, Radar secundario,
Calibracion de sensores, Filtro de Kalman, Filtro Interacting Multiple Model

RESUMEN

Summary
Along this Master Thesis development, in order to avoid any possible malfunctioning of a
multirradar airspace surveillance system, the design and implementation of a bias errors es-
timation and correction algorithm for Secondary Surveillance Radars (SSR) has been carried
out.
Firstly, a simulation environment that allows an arbitrary definition of airspace scenarios and
the generation of radar measurements based on a selected mathematical model has been deve-
loped. The use of this type of data will be necessary in order to verify the correct performance
of the algorithms that compose the data processing and trajectory alignment system.
In addition, the correct performance of the system will be tested under real radar measure-
ments. From the obtained results, it will be proven that the chosen mathematical error model
adapts itself considerably to the reality, and that, in consequence, the implemented bias esti-
mation and trajectory alignment algorithm is valid for its use in real Air Traffic Management
environments.
Finally, a tracking filter will be implemented based on the theory of Interacting Multiple
Model (IMM) filters in order to fuse the measurements coming from the different radars with
overlapped coverages and to carry out the tracking of the different aircraft trajectories. This
will allow the visualization of the final trajectories that will be shown on screen to the air trafic
controllers, allowing to verify the correct performance of the implemented trajectory alignment
system.
Keywords
Air Traffic Management, Air Traffic Control, Target tracking, Secondary Radar, Sensor re-
gistration, Kalman filter, Interacting Multiple Model filter

SUMMARY

Indice general
1. Introduccion 1
1.1. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Estructura de la memoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Sistema de Gestion de Trafico Aereo 5
2.1. Servicios del Sistema de Control de Trafico Aereo . . . . . . . . . . . . . . . . 6
2.1.1. Servicio de Vigilancia Aerea . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.2. Servicio de Vigilancia Sobre la Superficie de Aeropuertos . . . . . . . 7
2.1.3. Centro de Procesado de Datos . . . . . . . . . . . . . . . . . . . . . . 7
2.1.4. Gestion de Redes de Seguridad y Garantıa de Separacion . . . . . . . . 8
2.1.5. Sistemas de Visualizacion . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2. Sensores de Vigilancia Aerea . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.1. Radares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1.1. Radar de Vigilancia Primario . . . . . . . . . . . . . . . . . 10
2.2.1.2. Radar de Vigilancia Secundario . . . . . . . . . . . . . . . . 11
2.2.2. Automatic Dependant Surveillance - Broadcast (ADS-B) . . . . . . . . 12
2.2.3. Wide Area Multilateration (WAM) . . . . . . . . . . . . . . . . . . . . 12
3. Sistemas de Coordenadas 15

INDICE GENERAL
3.1. Sistema de Referencia Geodesico . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.1.1. World Geodetic System 1984 . . . . . . . . . . . . . . . . . . . . . . 16
3.1.2. Coordenadas Geodesicas . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2. Coordenadas Locales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3. Coordenadas Esfericas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3.1. Problematica de las coordenadas esfericas . . . . . . . . . . . . . . . . 20
3.4. Proyeccion estereografica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4. Modelo de Error de las Medidas de Radares Secundarios 25
4.1. Sesgo en Azimuth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.1.1. Desviacion del Eje la Antena . . . . . . . . . . . . . . . . . . . . . . . 26
4.1.2. Desvıo de los Ejes de Rotacion . . . . . . . . . . . . . . . . . . . . . . 29
4.1.3. Error de Calibracion del codificador optico . . . . . . . . . . . . . . . 31
4.1.4. Composicion del Sesgo en Azimuth . . . . . . . . . . . . . . . . . . . 34
4.2. Sesgo en Distancia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2.1. Error de Propagacion . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3. Sesgo en Altitud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5. Descripcion Funcional del Sistema 43
5.1. Bloque de Generacion de Datos . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.1.1. Generacion de Trayectorias . . . . . . . . . . . . . . . . . . . . . . . 45
5.1.2. Descripcion de los Radares . . . . . . . . . . . . . . . . . . . . . . . . 47
5.1.3. Simulacion de Medidas . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.1.4. Sesgar Medidas y Adicion del Ruido de Medida . . . . . . . . . . . . . 49
5.1.5. Multiplexacion de Datos . . . . . . . . . . . . . . . . . . . . . . . . . 50
INDICE GENERAL
5.2. Bloque de Procesado de Datos . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2.1. Asociacion de Medidas . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2.2. Estimacion de Sesgos . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.2.3. Correccion de la Medida . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.2.4. Seguimiento de Trayectorias . . . . . . . . . . . . . . . . . . . . . . . 54
5.3. Datos de Radares Reales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6. Filtro de Alineamiento 57
6.1. Asincronismo y Generacion de Conjuntos de Medidas . . . . . . . . . . . . . . 58
6.2. Modelo del Filtro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.3. Matrices de Proyeccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.4. Estimacion Recursiva de Sesgos . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.4.1. Inicializacion del Filtro . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.4.2. Composicion del Vector de Matrices de Proyeccion . . . . . . . . . . . 67
6.4.3. Proceso Iterativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
7. Filtro de Seguimiento 71
7.1. Seleccion de Modelos de Transicion . . . . . . . . . . . . . . . . . . . . . . . 72
7.1.1. Modo 1. Movimiento rectilıneo . . . . . . . . . . . . . . . . . . . . . 72
7.1.2. Modo 2. Giro de derechas . . . . . . . . . . . . . . . . . . . . . . . . 73
7.1.3. Modo 3. Giro de izquierdas . . . . . . . . . . . . . . . . . . . . . . . 75
7.2. Diseno del Filtro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7.2.1. Mezclado de Estimaciones . . . . . . . . . . . . . . . . . . . . . . . . 76
7.2.2. Filtrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.2.3. Actualizacion de Probabilidades . . . . . . . . . . . . . . . . . . . . . 78

INDICE GENERAL
7.2.4. Combinacion de Estimaciones de Estado . . . . . . . . . . . . . . . . 79
7.3. Transicion de Modelos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
8. Interfaz de Trabajo 83
8.1. Definicion del escenario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
8.1.1. Creacion o carga del escenario . . . . . . . . . . . . . . . . . . . . . . 83
8.1.2. Descripcion de Radares y Trayectorias . . . . . . . . . . . . . . . . . . 85
8.1.2.1. Parametros de Radares . . . . . . . . . . . . . . . . . . . . . 85
8.1.2.2. Parametros de Trayectorias . . . . . . . . . . . . . . . . . . 86
8.2. Visualizacion del Escenario . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
8.2.1. Dibujar Escenario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
8.3. Simulacion y Filtrado de Datos . . . . . . . . . . . . . . . . . . . . . . . . . . 90
8.4. Datos Reales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
9. Pruebas del Sistema 93
9.1. Evaluacion del Filtro de Alineamiento . . . . . . . . . . . . . . . . . . . . . . 94
9.2. Evaluacion del Filtro de Seguimiento . . . . . . . . . . . . . . . . . . . . . . . 100
9.3. Evaluacion del Sistema Completo . . . . . . . . . . . . . . . . . . . . . . . . 104
9.3.1. Datos Simulados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
9.3.2. Datos Reales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
10. Conclusiones y Lıneas Futuras de Trabajo 117
10.1. Lineas de Continuacion Futuras . . . . . . . . . . . . . . . . . . . . . . . . . 118
A. Transformacion de coordenadas 119
A.1. Conversion WGS84 a ENU . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119

INDICE GENERAL
A.1.1. Earth-Centered Earth-Fixed . . . . . . . . . . . . . . . . . . . . . . . 119
A.1.2. Conversion de coordenadas geodesicas a ECEF . . . . . . . . . . . . . 120
A.1.3. Conversion de ECEF a ENU . . . . . . . . . . . . . . . . . . . . . . . 121
A.2. Conversion ENU a Esfericas . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
B. Filtro de Kalman 125
B.1. Inicializacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
B.2. Estimacion Recursiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Bibliografıa 129

INDICE GENERAL

Indice de figuras
2.1. Elementos del sistema de Gestion de Trafico Aereo. . . . . . . . . . . . . . . . 6
2.2. Estimacion de posicion mediante WAM [3] . . . . . . . . . . . . . . . . . . . 13
3.1. Sistemas de coordenadas y transformaciones . . . . . . . . . . . . . . . . . . . 15
3.2. Coordenadas geodesicas [6]. . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3. Conversion de coordenadas cartesianas a esfericas [7]. . . . . . . . . . . . . . 20
3.4. Problematica de las coordenadas esfericas. . . . . . . . . . . . . . . . . . . . . 21
3.5. Deteccion de altura negativa de la aeronave. . . . . . . . . . . . . . . . . . . . 21
3.6. Proyeccion estereografica [8]. . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1. Coordenadas de Antena. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2. a) Offset en Azimuth b) Estrabismo de la Antena c) Inclinacion de la Antena [9]. 28
4.3. Desvıo de los ejes de rotacion del radar [9]. . . . . . . . . . . . . . . . . . . . 30
4.4. Codificador optico con sesgo por excentricidad [9]. . . . . . . . . . . . . . . . 31
4.5. Codificador optico con sesgo por desajuste respecto al plano horizontal [9]. . . 32
4.6. Error de distancia para diferentes altitudes [9]. . . . . . . . . . . . . . . . . . . 36
4.7. Cociente entre el sesgo en distancia a una determinada altitud h y el sesgo a una
altitud referencia hr = 14000m en funcion del valor de la altitud h [9]. . . . . . 37
4.8. Error de proyeccion producido por el sesgo de altitud [9]. . . . . . . . . . . . . 39

INDICE DE FIGURAS
5.1. Esquema de diseno y operacion del sistema planteado. . . . . . . . . . . . . . 44
5.2. Esquema de del proceso de generacion de la trayectoria de una determinada
aeronave. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.3. Generacion de detecciones radar. . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.4. Multiplexacion de datos radar. . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.5. Asociacion de medidas a trayectorias. . . . . . . . . . . . . . . . . . . . . . . 52
6.1. Aparicion de trayectorias ficticias en escenarios multirradar. . . . . . . . . . . 57
6.2. Asincronismo de medida en escenarios multirradar. . . . . . . . . . . . . . . . 59
6.3. Generacion de conjuntos de medidas temporales en escenarios multirradar [18]. 59
6.4. Diagrama de flujo de generacion de conjuntos de medidas. . . . . . . . . . . . 60
6.5. Ejemplo de seleccion de las 3 detecciones de entrada al Filtro de Alineamiento. 66
7.1. Diagrama de mezclado de estimaciones. . . . . . . . . . . . . . . . . . . . . . 77
7.2. Diagrama de filtrado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.3. Diagrama de actualizacion de probabilidad. . . . . . . . . . . . . . . . . . . . 79
7.4. Diagrama de combinacion de estimaciones de estado. . . . . . . . . . . . . . . 80
8.1. Parametros de definicion de un nuevo escenario. . . . . . . . . . . . . . . . . . 84
8.2. Menu de seleccion de trayectoria a modificar. . . . . . . . . . . . . . . . . . . 85
8.3. Ventanas de definicion de parametros radar. . . . . . . . . . . . . . . . . . . . 86
8.4. Ventanas de definicion de trayectorias. . . . . . . . . . . . . . . . . . . . . . . 87
8.5. Visualizacion de escenario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
8.6. Eleccion de anadir trayectorias al escenario. . . . . . . . . . . . . . . . . . . . 89
8.7. Dialogo de cantidad de trayectorias a anadir. . . . . . . . . . . . . . . . . . . . 89
8.8. Seleccion de tipos de trayectorias a visualizar. . . . . . . . . . . . . . . . . . . 90

INDICE DE FIGURAS
9.1. Escenario definido para analisis de sesgos y datos simulados. . . . . . . . . . . 94
9.2. Parametros de Sesgo en Distancia del Radar 1 (∆ρ0, α1, α2, α3). . . . . . . . . 97
9.3. Parametros de Sesgo en Azimuth del Radar 1 (θ0, sant, taxis, saxis). . . . . . . . 97
9.4. Parametros de Sesgo en Azimuth del Radar 1 (δRx, δRy, senc,s, senc,c). . . . . . 98
9.5. Parametros de Sesgo en Distancia del Radar 2 (∆ρ0, α1, α2, α3). . . . . . . . . 98
9.6. Parametros de Sesgo en Azimuth del Radar 2 (θ0, sant, taxis, saxis) . . . . . . . 99
9.7. Parametros de Sesgo en Azimuth del Radar 2 (δRx, δRy, senc,s, senc,c) . . . . . 99
9.8. Parametros de Sesgo en Altitud . . . . . . . . . . . . . . . . . . . . . . . . . . 100
9.9. Escenario de evaluacion del filtro de seguimiento IMM. . . . . . . . . . . . . . 101
9.10. Evaluacion IMM: RMSE de posicion, velocidad y rumbo. . . . . . . . . . . . . 103
9.11. Transicion de probabilidades de modelos del IMM. . . . . . . . . . . . . . . . 104
9.12. Resultado de correccion en sesgo del escenario con datos simulados (1). . . . . 106
9.13. Resultado de correccion en sesgo del escenario con datos simulados (2). . . . . 106
9.14. Resultado de trayectorias filtradas por el IMM. . . . . . . . . . . . . . . . . . 107
9.15. Google Earth: Trayectorias sesgadas vs Trayectoria Ideal. . . . . . . . . . . . . 108
9.16. Google Earth: Trayectorias alineadas vs Trayectoria Ideal. . . . . . . . . . . . 108
9.17. Google Earth: Trayectorias filtradas vs Trayectoria Ideal. . . . . . . . . . . . . 109
9.18. Rango de cobertura de los radares del escenario. . . . . . . . . . . . . . . . . . 110
9.19. Escenario real. Trayectorias sesgadas. . . . . . . . . . . . . . . . . . . . . . . 111
9.20. Escenario real completo (1). . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
9.21. Escenario real completo (2). . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
9.22. Escenario real. Trayectorias alineadas. . . . . . . . . . . . . . . . . . . . . . . 113
9.23. Escenario real. Trayectorias alineadas. . . . . . . . . . . . . . . . . . . . . . . 113
9.24. Escenario real. Trayectorias filtradas. . . . . . . . . . . . . . . . . . . . . . . . 114

INDICE DE FIGURAS
9.25. Escenario real. Trayectorias filtradas. . . . . . . . . . . . . . . . . . . . . . . . 114
A.1. Sistema de coordenadas ECEF . . . . . . . . . . . . . . . . . . . . . . . . . . 120
A.2. Transformacion de coordenadas locales a esfericas. . . . . . . . . . . . . . . . 122
B.1. Filtro de Kalman [19]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128

Capıtulo 1
Introduccion
Actualmente, pese a que la irrupcion de sensores de posicion modernos como el ADS-B y
WAM es considerada como el presente y futuro de los sistemas de control aereo, los radares
de tipo secundario (SSR) seguiran siendo uno de los pilares de cualquier sistema de vigilancia
aerea ejerciendo funciones de redundancia. Habitualmente, a fin de cubrir una zona extensa del
espacio aereo, se recurre a la utilizacion de multiples radares con areas de cobertura solapadas.
Esto conllevara la necesidad de realizar un procesado conjunto de las detecciones que cada radar
envıa de manera independiente a un centro de fusion de datos, donde las medidas provenientes
de cada radar se combinaran para formar una unica trayectoria para cada aeronave detectada.
Sin embargo, estos datos se veran afectados por un conjunto de errores de alineamiento de los
que sufre de manera independiente cada radar. Estas imperfecciones de medida, denominadas
sesgos, pueden provocar que cada centro de control situe una misma aeronave en diferentes
trayectorias, que, consecuentemente, puede conllevar un funcionamiento incorrecto del sistema
de vigilancia aerea.
Este proyecto, realizado en la Escuela Tecnica Superior de Ingenieros de Telecomunicacion
de la Universidad Politecnica de Madrid, emulara algunas de las funciones propias de un centro
de procesado de datos de los sistemas de control de trafico aereo. Principalmente, se centrara
en la implementacion de un algoritmo de estimacion de los sesgos de medida de los radares de
un determinado escenario aereo. Estas estimaciones permitiran realizar correcciones sobre las
propias medidas que facilitaran la posterior tarea de fusion de medidas procedentes de multiples
radares. Por tanto, adicionalmente, se implementara un filtro de seguimiento que procesara e
integrara los datos (corregidos en sesgo) procedentes de los diferentes radares del escenario en
cuestion para presentarlos en la pantalla del controlador aereo.
1

2 CAPITULO 1. INTRODUCCION
A lo largo del proyecto, se trabajara con datos radar de diferente ındole:
En primera instancia, se utilizaran medidas radar ficticias, generadas a partir de un pro-
ceso de simulacion de un determinado escenario aereo. Estas detecciones radar estaran
alteradas por ruido y sesgos de medida que se definiran a partir de un determinado modelo
matematico. Utilizando este tipo de datos, tanto la magnitud de los sesgos como el ruido
contenido por las medidas radar obtenidas habran sido escogidos de manera arbitraria. Por
tanto, el conocimiento de antemano de los parametros a estimar y corregir facilitara el
proceso de diseno y evaluacion del correcto funcionamiento del sistema.
Una vez se haya comprobado que el sistema funciona correctamente utilizando datos de
tipo simulados, se procedera a corroborar que el sistema implementado opera tambien
correctamente con datos procedentes de radares reales, pudiendo ası verificar si el modelo
de estimacion de errores de alineamiento utilizado resultarıa valido para su utilizacion en
sistemas de control de trafico aereo reales.
1.1. Objetivos
El objetivo principal de este proyecto consistira en implementar y probar un sistema de
estimacion y correccion de sesgos de radares de tipo secundario utilizados para el control de
trafico aereo.
Debido a pequenas imperfecciones de instalacion o desgaste de los componentes, los sesgos
de los radares seran cambiantes con el paso del tiempo, impidiendo ası que la correccion aplica-
da a las medidas pueda mantenerse constante una vez se conozcan los parametros que definen
los sesgos. Por tanto, en este proyecto se optara por un metodo de estimacion de parametros
dinamico, de manera que los sesgos puedan ser constantemente calculados a partir del trafico
existente.
Para conseguir el objetivo principal presentado, se perseguira la consecucion de los siguien-
tes objetivos:
Seleccion del modelo matematico de errores de las medidas radar a utilizar en el proyecto.
Desarrollo de una interfaz de trabajo que permita crear y simular escenarios de trafico
aereo compuestos por trayectorias y radares definidos arbitrariamente.
Diseno e implementacion sobre la interfaz de trabajo de un filtro de alineamiento que

1.2. ESTRUCTURA DE LA MEMORIA 3
estimara de manera dinamica para cada instante temporal los sesgos de los radares con los
que se hayan visto afectadas las medidas. A partir de la teorıa de los Filtros de Kalman
Extendidos y el modelo matematico de errores escogido, el filtro procesara y estimara una
serie de parametros que definen los sesgos que distorsionan las medidas recibidas. Estos
parametros se utilizaran para aplicar una correccion sobre las medidas sesgadas.
Diseno e implementacion sobre la interfaz de trabajo de un filtro de seguimiento Interac-
ting Multiple Model (IMM) que, una vez las medidas hayan sido corregidas en sesgo, inte-
gre y fusione las medidas procedentes de diferentes radares. De esta manera, el controlador
recibira una unica trayectoria por aeronave, generada a partir de las medidas procedentes
de diferentes radares.
Corroborar mediante la utilizacion de datos procedentes de radares reales el correcto fun-
cionamiento del sistema implementado.
1.2. Estructura de la memoria
El proyecto presentado en este documento se estructura en diez capıtulos, y su contenido es
el siguiente:
Capıtulo 1 - Introduccion: Se realiza una puesta en contexto del ambito en el cual se va
a enmarcar el proyecto presentado, ası como la presentacion de los principales objetivos
perseguidos y la estructura del documento presentado.
Capıtulo 2 - Sistema de Gestion de Trafico Aereo: Se describiran de forma general
las principales actividades y funciones de un Sistema de Gestion de Trafico Aereo y se
destaca el marco o ambito particular del mismo sobre el cual se va a desarrollar el proyecto
presentado.
Capıtulo 3 - Sistemas de Coordenadas: Este capıtulo detallara los diferentes sistemas
de coordenadas cuya utilizacion sera necesaria para llevar a cabo las diferentes tareas que
permitan el cumplimiento de los objetivos presentado.
Capıtulo 4 - Modelo de Error de las Medidas de Radares Secundarios: Se presentara y
desarrollara el modelo de sesgos de medida de radares secundarios seleccionado para este
proyecto. En los proximos capıtulos, el modelo se utilizara para definir matematicamente
los sesgos de los datos radar generados mediante la interfaz y, posteriormente, para llevar
a cabo el proceso de estimacion de sesgos.

4 CAPITULO 1. INTRODUCCION
Capıtulo 5 - Descripcion Funcional del Sistema: Se propondra y describira el esquema
general del proyecto y se detallara la composicion de los principales bloques funciona-
les del sistema. Se comenzara describiendo el procedimiento a seguir para llevar a cabo
correctamente la etapa de generacion de datos simulados que serviran para realizar una pri-
mera evaluacion del sistema, antes de dar paso a la utilizacion de datos de radares reales.
Finalmente, se describira la etapa de procesado de los datos radar recibidos. Los bloques
de alineamiento y seguimiento de las trayectorias se detallaran en profundidad en los si-
guientes capıtulos.
Capıtulo 6 - Filtro de Alineamiento: Se expondra el diseno del filtro de estimacion de
sesgos implementado que representa el principal objetivo de este proyecto. Para este di-
seno, se describira un algoritmo iterativo que permitira estimar de manera recursiva los
sesgos de los diferentes radares del escenario en cuestion.
Capıtulo 7 - Filtro de Seguimiento: Se describira el diseno filtro Interacting Multiple
Model (IMM) implementado para integrar las medidas procedentes de diferentes radares
y llevar a cabo el seguimiento de las trayectorias de las diferentes aeronaves detectadas.
Capıtulo 8 - Interfaz de Trabajo: Se presentara la interfaz de simulacion sobre la cual
se han desarrollado las diferentes etapas funcionales del proyecto. Se describiran tanto la
estructura como las diferentes funcionalidades del simulador.
Capıtulo 9 - Pruebas del Sistema: En primer lugar, se evaluara la calidad de los filtros de
alineamiento y seguimiento implementados. Posteriormente, se presentaran los resultados
que permitan analizar las prestaciones del sistema completo tanto utilizando datos de tipo
generados como procedentes de radares reales.
Capıtulo 10 - Conclusiones: Se explicaran las conclusiones extraıdas tras la realizacion
del proyecto y se propondran algunas de las posibles lıneas de continuacion futuras.

Capıtulo 2
Sistema de Gestion de Trafico Aereo
La Gestion del Trafico Aereo (GTA) es un termino que engloba todas las actividades y sis-
temas provistos para regular el trafico de aeronaves en espacios aereos y ofrecer informacion y
soporte a los pilotos. Entre sus objetivos y funciones mas relevantes, destaca la tarea de vigilan-
cia aerea a fin de evitar colisiones entre aeronaves, conocida como Control de Trafico Aereo.
Por otra parte, el mantenimiento de un flujo de trafico aereo controlado y ordenado se llevara
a cabo mediante la funcion de Gestion del Flujo de Trafico Aereo, que recoge todos los subsiste-
mas responsables de la gestion del plan de vuelo de las aeronaves. Utilizando tanto los datos ya
procesados como los recibidos por los Centros de Procesado de Datos, se encarga de almacenar
y actualizar los planes de vuelo de las aeronaves, ası como de llevar a cabo las modificaciones
necesarias y distribuir esta informacion al resto de sistemas del servicio de control de trafico
aereo [1]. Alrededor de 30 minutos antes de la hora prevista para el despegue, el sistema de
procesado de vuelos asignara un codigo identificador al transpondedor de la aeronave y prepara
el Sistema de Visualizacion del controlador aereo para que pinte el progreso de la trayectoria.
Posteriormente, una vez el avion haya iniciado su ruta, esta actividad sera la encargada de pro-
veer informacion de cambios en la trayectoria a los controladores y de facilitar la coordinacion
entre centros de control aereos adyacentes [1][2].
La Figura 2.1 ilustra los principales sistemas que conforman las actividades mencionadas.
5

6 CAPITULO 2. SISTEMA DE GESTION DE TRAFICO AEREO
Figura 2.1: Elementos del sistema de Gestion de Trafico Aereo.
La Seccion 2.1 ofrecera una vision general de los principales sistemas y funciones de los
que se compone la actividad de Control de Trafico Aereo, que sera la actividad en la que se
centre este proyecto. Por su parte, la Seccion 2.2 dara una vision de los principales sistemas
sensoriales empleados para llevar a cabo las tareas de vigilancia aerea en la actualidad.
2.1. Servicios del Sistema de Control de Trafico Aereo
Los sistemas de Control de Trafico Aereo (CTA) se componen de diversos sistemas que im-
plementan funciones especıficas de la tarea de vigilancia. En base a la clasificacion de servicios
presentada en [1], esta seccion ofrece una vision general de los diferentes sistemas y servicios
mas destacados que componen un sistema de CTA.

2.1. SERVICIOS DEL SISTEMA DE CONTROL DE TRAFICO AEREO 7
2.1.1. Servicio de Vigilancia Aerea
El Servicio de Vigilancia Aerea representa una de las funciones claves en la gestion del
espacio aereo en las tareas de separacion y planificaciones del trafico. A fin de evitar colisiones
y asegurar la suficiente separacion entre aeronaves, sera necesario que los controladores aereos
sean conocedores de la posicion de las aeronaves.
Los metodos de separacion de trayectorias utilizados hoy en dıa por el Sistema de Vigilancia
Aerea hacen uso principalmente de radares y sistemas de sensores avanzados como el ADS-B,
detallados a continuacion en la Seccion 2.2. En ocasiones, es comun recurrir a la utilizacion
de confirmaciones de separacion visual por parte de los pilotos, aunque esta tecnica quedara
condicionada a la visibilidad permitida por las condiciones meteorologicas [2].
2.1.2. Servicio de Vigilancia Sobre la Superficie de Aeropuertos
Los movimientos de los aeronaves sobre tierra son principalmente gestionados por el Siste-
ma Avanzado de Guıa y Control de Movimientos en Superficie (A-SMGCS) en funcion de la
densidad de trafico actual de un aeropuerto [1].
Este sistema recibe informacion proveniente de los Sensores de Vigilancia descritos poste-
riormente en la Seccion 2.2 y lleva a cabo las tareas de procesado de datos en un modulo de
fusion. Posteriormente, estos datos seran monitorizados en un sistema de visualizacion especıfi-
co. De esta manera, los controladores obtienen una vision del trafico tanto de aeronaves como
de cualquier otro tipo de vehıculos sobre la superficie del aeropuerto, pudiendo ası detectar
intrusiones y evitar posibles colisiones [2].
2.1.3. Centro de Procesado de Datos
Los sistemas de Control de Trafico Aereo deben manejar datos enviados por multiples rada-
res y redes de sensores de diferente ındole, como podrıan ser el ADS-B o los sistemas inerciales.
A fin de proveer una informacion optima y precisa, sera necesario procesar y unificar todos es-
tos datos. Esta tarea de fusion sera llevada a cabo por el Centro de Procesado de Datos. Para
ello, se requerira analizar y procesar correctamente la informacion recibida mediante tecnicas y
algoritmos avanzados [1].
Los objetivos de este Trabajo de Fin de Master se centraran en la implementacion de algunas

8 CAPITULO 2. SISTEMA DE GESTION DE TRAFICO AEREO
de las funciones de procesado multirradar de un Centro de Procesado de Datos. De esta manera,
las detecciones de varios radares podran ser combinadas a fin de aumentar la robustez y con-
fiabilidad de la informacion provista. Sin embargo, para cumplir estos objetivos sera necesario
tener en cuenta las siguientes consideraciones:
Dado que las medidas recibidas por el Centro de Procesado de Datos estaran referidas a
las propias posiciones de los diferentes sensores contemplados, sera necesario establecer
un sistema de coordenadas comun sobre el que definir las medidas y poder llevar a cabo el
procesado de datos conjunto (Capıtulo 3).
Las medidas recibidas estaran afectadas por sesgos de diferente magnitud en funcion del
sensor de procedencia, lo cual puede dificultar considerablemente el proceso de fusion de
datos. Por ello, en base a un determinado modelo que defina matematicamente los parame-
tros que componen estos sesgos (Capıtulo 4), sera necesario llevar a cabo un proceso de
estimacion y correccion de estos sesgos (Capıtulo 6) a medida que se vayan recibiendo las
medidas.
Finalmente, utilizando filtros y algoritmos especıficos, se reconstruira una unica trayectoria
a partir de las medidas corregidas en sesgo de los multiples radares contemplados (Capıtulo 7).
Los resultados obtenidos por el Centro de Procesado de Datos podran ser enviados periodi-
camente a la pantalla del controlados o a cualquier otro bloque del sistema de Gestion del Trafi-
co Aereo que lo requiera, como consolas o el sistema de prediccion de trayectorias ilustrado en
la Figura 2.1.
2.1.4. Gestion de Redes de Seguridad y Garantıa de Separacion
A partir de la informacion provista por el Servicio de Vigilancia Aerea, los controladores
son capaces de separar un numero finito de trayectorias en el area de control que les haya sido
asignada. Sin embargo, ante el el crecimiento de trafico aereo actual, se ha recurrido al uso de
mecanismos y sistemas sofisticados automatizados que no requieren una exhaustiva implicacion
del controlador en este tipo de funciones [2].
Entre las diferentes funciones de automatizadas para asegurar la separacion de las aeronaves
cabe destacar el sistema de Alerta de Conflictos a Corto Plazo (STCA), encargada de detectar
conflictos inmediatos entre trayectorias y alertar a los controladores aereos de la incidencia.

2.2. SENSORES DE VIGILANCIA AEREA 9
Este sistema se utiliza frecuentemente junto al de Advertencia de Altitud de Mınima Seguri-
dad (MSAW), que determina la altitud mınima sobre la cual deberıa volar la aeronave en una
determinada zona para evitar obstaculos terrestres.
Pese a que en este proyecto nos centraremos unicamente en la vigilancia provista desde la
Tierra, cabe destacar la utilizacion del como el TCAS II como sistema anticolision abordo de las
propias aeronaves. Mediante este sistema, las aeronaves seran capaces de detectar la distancia,
altitud y rumbo de las aeronaves cercanas. En base a estas detecciones, el sistema TCAS II
generara senales de alerta que, a su vez, recomendaran a las aeronaves en alerta de colision
maniobras coordinadas de evasion de colision.
2.1.5. Sistemas de Visualizacion
Los Sistemas de Visualizacion reciben los datos procesados con los que se monitoriza el
estado aereo en la pantalla del controlador aereo. La presentacion de esta informacion debe
cumplir una serie de requisitos y reglas que faciliten al controlador la tarea de vigilancia, de
manera que se tenga acceso a los siguientes elementos [1].
El tipo de sensor utilizado para llevar a cabo la deteccion de la posicion monitorizada.
La visualizacion de las posiciones registradas para instantes temporales anteriores para
cada aeronave (traza).
La visualizacion de los vectores de velocidad de cada aeronave.
Informacion propia de cada aeronave (tipo, velocidad, plan de vuelo...).
2.2. Sensores de Vigilancia Aerea
Los sistemas sensoriales de vigilancia tienen como objetivo principal detectar y enviar a
los Centros de Procesado de Datos la mayor cantidad de informacion posible de las aeronaves
detectadas.
Actualmente, sensores de posicion modernos como de vigilancia automatica (ADS-B, ADS-
C) y multilateracion (WAM, MLAT) son considerados como el presente y futuro de los sistemas
de control aereo. Sin embargo, los sistemas de vigilancia actuales siguen hacen uso de radares
como sistema redundancia. Pese a que en la actualidad las redes de radares secundarios preva-

10 CAPITULO 2. SISTEMA DE GESTION DE TRAFICO AEREO
lecen como dominantes, los radares primarios son utilizadas como una red de soporte adicional
para situaciones en las que su uso pueda resultar ventajoso con respecto al radar secundario.
A lo largo de esta seccion se ofrecera una vision general de los principales sistemas de
deteccion utilizados en tareas de vigilancia aerea, haciendo especial incapie en los radares de
tipo secundario en la Seccion 2.2.1.2, puesto que seran la fuente de datos a utilizar en este
proyecto.
2.2.1. Radares
Los radares son sistemas que permiten la deteccion y seguimiento de las aeronaves del espa-
cio aereo. Atendiendo a su modo de operacion y capacidades, se distinguen esencialmente dos
tipos de radares: primario y secundario.
2.2.1.1. Radar de Vigilancia Primario
Los Radares de Vigilancia Primarios transmiten pulsos de alta frecuencia que se reflejan en
las aeronaves u otro tipo de blancos siguiendo el principio de reflexion de las ondas electro-
magneticas [3].
El sistema mide la diferencia temporal entre la emision y la recepcion del pulso, pudiendo
ası determinar la distancia a la que se encentra la aeronave. Por otro lado, la posicion del blanco
podra ser determinada por medio del azimuth y elevacion de la antena del radar en el momento
de la deteccion.
Los radares de tipo primario cuentan con la ventaja de no necesitar ningun tipo de comunica-
cion con un transpondedor instalado en las aeronaves, pero estan sujetos a recibir reflexiones no
deseadas por parte de otros objetos. Este tipo de reflexiones no deseadas se caracterizan como
clutter, y obligan a los sistemas de vigilancia primaria a incorporar mecanismos de supresion
de reflexiones no deseadas en sus funciones de procesado de datos [3].
A dıa de hoy, los radares primarios son esencialmente utilizados en los aeropuertos como
sistema de apoyo. Su uso se ha limitado a situaciones en las que se reciban aeronaves que no
dispongan de transpondedor o la comunicacion con el mismo sea imposible.

2.2. SENSORES DE VIGILANCIA AEREA 11
2.2.1.2. Radar de Vigilancia Secundario
Los Radares de Vigilancia Secundarios (SSR) estan formados por una estacion terrestre in-
terrogativa y un transpondedor a bordo de la aeronave. Este tipo de radares basa su funcio-
namiento en una vigilancia cooperativa, ya que cuando la estacion interroga a la aeronave (a
1030 MHz), los pulsos transmitidos no son reflejados, sino procesados y retransmitidos con la
respuesta correspondiente por parte del transpondedor de la aeronave (a 1090 MHz). De esta
manera, los radares de tipo secundario evitan en gran parte el problema de recepcion de senales
no deseadas del que sufren los radares primarios, pero existira la posibilidad que las respuestas
de aeronaves cercanas se interfieran entre sı. Sin embargo, este tipo de radares requiere de una
comunicacion bidireccional para la cual sera necesaria la instalacion de equipamiento adicional
en las aeronaves [1] [3].
Este proyecto se centrara unicamente en detecciones con procedencia en radares SSR. Las
medidas de distancia, azimuth y altitud de las aeronaves se obtendran utilizando diferentes
modos de interrogacion soportados por los transpondedores, siendo los modos A/C y S los mas
destacados.
Modo A/C: Los modos de interrogacion de A y C se lanzan alternativamente y de ma-
nera anonima, con el objetivo de que respondan unicamente los transpondedores que se
encuentren dentro del haz principal de la antena del radar. La respuesta al modo A estara
formada por un numero de identificacion y mientras que la del Modo C se correspondera
a la altitud barometrica de la aeronave [1].
Modo S: Es una evolucion del Modo A/C que, ademas de conservar todas sus funcionali-
dades y mejorar el nivel de resolucion de la altitud, permite llevar a cabo una interrogacion
selectiva de las aeronaves gracias al uso de un identificador unico de 24 bits dado a cada
transpondedor [1]. Ademas, incluye nuevas funciones de vigilancia que habilitaran solici-
tar la velocidad y el rumbo con respecto a la Tierra de la aeronave [2].
La distancia de la aeronave se calculara asociando los tiempos transcurridos entre el envıo
de las interrogaciones y la recepcion de las respuestas. Por su parte, el azimuth se determinara
a partir de la orientacion del radar. Por lo tanto, mediante el uso de radares secundarios, la esta-
cion terrestre sera capaz tanto de identificar como de determinar la posicion en 3 dimensiones
(distancia, azimuth y altitud barometrica) de las aeronaves detectadas [2].

12 CAPITULO 2. SISTEMA DE GESTION DE TRAFICO AEREO
2.2.2. Automatic Dependant Surveillance - Broadcast (ADS-B)
Las aeronaves equipadas con transpondedores ADS-B pueden transmitir una vez por se-
gundo informacion de su propio sistema de navegacion, dando a conocer posicion, velocidad,
meteorologıa u otro tipo de informacion relevante [2].
Por un lado, esta informacion se recibira en las estaciones de control terrestres, de manera
que el sistema ADS-B sustituya las funciones de un radar secundario al enviar la informacion de
manera mas frecuente y, generalmente, mas precisa. Por otro lado, los mensajes ADS-B podran
ser recibidos a su vez por otras aeronaves cercanas, pudiendo utilizar esta informacion para
proveer conocimiento del espacio aereo a los pilotos y evitar colisiones [1], tal y como se ha
mencionado en la Seccion 2.1.4.
2.2.3. Wide Area Multilateration (WAM)
Los sistemas de multilateracion de banda ancha (WAM) como sistema de vigilancia aerea
se componen de redes de sensores desplegados en areas donde la instalacion de radares puede
resultar costosa. Este sistema trabaja aprovechando senales emitidas por los transpondedores de
las aeronaves [1], pudiendo ser tanto respuestas dirigidas a los radares secundarios cercanos,
como squitters enviados por el sistema ADS-B [1] [2].
A partir de la diferencia temporal entre los instantes de recepcion de dos sensores diferentes
(TDOA), se podra llevar a cabo una estimacion de una superficie hiperbolica de 3 dimensiones
sobre la cual puede encontrarse la aeronave [3]. De esta manera, cada par de sensores sera
capaz de dibujar una hiperboloide correspondiente al TDOA medido a partir de sus instantes
de recepcion. Cuando la senal de una misma aeronave es detectada por 4 sensores diferentes,
la posicion de la misma podra calcularse atendiendo a la interseccion entre las hiperboloides
resultantes. Este efecto se ilustra en la Figura 2.2.
Dado que la precision de este sistema dependera en gran parte del calculo de la diferencia
de tiempos de recepcion, la sincronizacion de los relojes de la red de sensores sera de vital
importancia.

2.2. SENSORES DE VIGILANCIA AEREA 13
Figura 2.2: Estimacion de posicion mediante WAM [3]

14 CAPITULO 2. SISTEMA DE GESTION DE TRAFICO AEREO

Capıtulo 3
Sistemas de Coordenadas
A lo largo de las diferentes fases del proyecto, sera necesario recurrir a la utilizacion de di-
ferentes sistemas de coordenadas para describir la localizacion de las aeronaves y los radares en
funcion del objetivo de la tarea. Cada uno de estos sistemas define un punto de origen o parame-
tros descriptivos diferentes a los demas, de manera que se llevaran a cabo transformaciones de
las datos de un sistema a otro en funcion de la tarea objetivo.
Este capıtulo recoge y describe los principales sistemas de coordenadas utilizados, ası como
el objetivo y situacion de utilizacion de cada uno de ellos. La Figura 3.1 ofrece una vision de
las transformaciones que se llevaran a cabo entre los diferentes sistemas descritos.
Figura 3.1: Sistemas de coordenadas y transformaciones
3.1. Sistema de Referencia Geodesico
Los sistemas de referencia geodesicos consisten en un recurso matematico que permite asig-
nar puntos sobre una superficie terrestre que viene caracterizada por la definicion de Geoide,
que trata de describir la figura natural teorica de la Tierra [4].
15

16 CAPITULO 3. SISTEMAS DE COORDENADAS
Debido a la complejidad que presenta la definicion matematica del Geoide, la superficie
terrestre puede representarse con una alta precision mediante un elipsoide de revolucion, cuyas
caracterısticas se definen mediante un Datum de Referencia que aproxime su forma de la mejor
manera posible a la zona deseada de la Tierra, y, constituyendo ası el denominado Sistema
Geodesico de Referencia. En geodesia, el termino Datum se refiere a un modelo matematico
que define un conjunto de puntos de referencia en la superficie terrestre utilizados para describir
la localizacion de otros puntos sobre la Tierra [4]. Existen dos tipos de Datum:
Datum Horizontales: Utilizados para describir un punto sobre la superficie terrestre.
Datum Verticales: Utilizados para medir elevaciones o profundidades con respecto a la
superficie terrestre.
Sin embargo, existen multiples Datum desarrollados para referenciar puntos en determinadas
areas del planeta, por lo que cada uno describira un Elipsoide de Referencia de diferentes radios
y puntos centrales. Es por ello que a lo largo de la historia se han utilizado multiples elipsoides
para definir el Sistema Geodesico de Referencia en funcion del paıs, ya que cabe la posibilidad
de que un modelo se adapte de mejor o peor manera que otro en funcion del area del planeta
sobre la que se quiera trabajar [4].
3.1.1. World Geodetic System 1984
World Geodetic System 1984 (WGS84) es un sistema de referencia terrestre y Datum geodesi-
co centrado y fijo en la Tierra. Este estandar consiste en un sistema de coordenadas geograficas
que permite localizar cualquier punto de la Tierra y en un grupo de constantes y parametros
que definen diferentes caracterısticas de la Tierra como su tamano, forma, gravedad y campos
geomagneticos [5]. A dıa de hoy, es, generalmente, el sistema de referencia utilizado a nivel
mundial en ambitos de navegacion.
Este modelo trata de obtener un elipsoide que se adapte de la mejor manera posible a toda la
Tierra en lugar de a zonas particulares y es utilizado por sistemas globales de navegacion como
el GPS, razon por la que ha sido seleccionado como el Datum de Referencia a utilizar a lo largo
de este proyecto.
La Tabla 3.1 resume los parametros definidos por el sistema WGS84 [5].

3.1. SISTEMA DE REFERENCIA GEODESICO 17
Parametro Notacion Unidades Valor
Semieje Mayor a m 6378137
Semieje Menor b m 6356725.314
Elipticidad f - 0.0033528
Excentricidad e - 0.081819
Velocidad de Giro Angular de la Tierra ω rads 7.2921 · 10−5
Tabla 3.1: Parametros del sistema WGS84
donde,
Elipticidad: Representa la medida de compresion de un cırculo para convertirse en una
elipse.
f =a− ba
Excentricidad: Se corresponde al cociente entre su semidistancia focal y su semieje mayor.
Tomara valores entre contenidos en el intervalo 0 < e < 1.
e =
√a2 − b2
a2
3.1.2. Coordenadas Geodesicas
El sistema de coordenadas geodesico sera el utilizado para describir las posiciones de los ra-
dares y las trayectorias de las multiples aeronaves contempladas en el escenario cuestion sobre
cualquier punto de la superficie terrestre. Estas posiciones vendran definidas por los parame-
tros de latitud, longitud y altitud sobre el Elipsoide de Referencia descrito mediante el sistema
WGS84. De esta manera, el vector de posicion utilizando el sistema de coordenadas geodesico
como (3.1).
Pg =
Φ
λ
h
(3.1)
Latitud (Φ): Mide la distancia angular que hay entre el plano ecuatorial y la recta normal
(perpendicular) que cruza el punto de la superficie de la Tierra en cuestion [5].
Longitud (λ): Expresa la distancia angular en el plano ecuatorial entre el meridiano del
punto en cuestion sobre la superficie terrestre y el meridiano de origen, tambien conocido
como meridiano de Greenwich [5].

18 CAPITULO 3. SISTEMAS DE COORDENADAS
Altitud (h): Se caracteriza como la distancia local vertical entre el punto medido y la
superficie del elipsoide terrestre de referencia [5].
Figura 3.2: Coordenadas geodesicas [6].
3.2. Coordenadas Locales
Como ya se ha descrito en el Capıtulo 1, este proyecto llevara a cabo una etapa en la que
se trabajara con datos radar obtenidos mediante un proceso de generacion. Por tanto, una vez
definidas todas las trayectorias y posiciones de los radares en el sistema geodesico, en esta
etapa surgira la necesidad de obtener la vision que cada radar pudiera tener de las diferentes
trayectorias definidas para el escenario en cuestion.
Para ello, sera necesario referir todas las medidas de posicion de las aeronaves a un sistema
de coordenadas Cartesianas cuyo origen se corresponda a la posicion geografica de cada uno de
los radares, al que se denominara como sistema de coordenadas locales.
El sistema de coordenadas locales representara en este proyecto un sistema de referencia
con origen en los diferentes radares simulados, de manera que pueda analizarse la deteccion o
visualizacion de cada una de las trayectorias desde cada radar.
De entre las diferentes sistemas de coordenadas locales existentes, se utilizara la modalidad
East North Up. Este sistema define un plano horizontal sobre la superficie del elipsoide de

3.3. COORDENADAS ESFERICAS 19
referencia, de manera que el punto de tangencia sea la posicion geografica del radar deseada,
siendo a su vez el origen del que parten los ejes (X,Y,Z).
Eje X: Apunta al Este.
Eje Y: Apunta al Norte y representa el eje de referencia para el calculo del azimuth.
Eje Z: Apunta hacia arriba, siendo perpendicular al plano horizontal.
El proceso de transformacion de coordenadas geodesicas a coordenadas locales ENU puede
encontrarse en el Anexo A.
3.3. Coordenadas Esfericas
Tras llevar a cabo el proceso de transformacion de coordenadas geodesicas a locales, el
sistema sera capaz de obtener una vision de la posicion en la que cada uno de los radares situa
a las diferentes aeronaves en trayecto en el instante de tiempo deseado.
Sin embargo, como ya se ha explicado en la seccion 2.2.1, los parametros que un radar es
capaz de medir son distancia, azimuth y altitud de las diferentes aeronaves, en lugar de una de-
terminada posicion en coordenadas cartesianas como se estarıa obteniendo mediante el sistema
de coordenadas locales. Por tanto, a fin de obtener las medidas radar en el formato adecuado, se
optara por convertir el sistema de coordenadas locales ENU al sistema de coordenadas esfericas.
Las coordenadas esfericas son un sistema tridimensional que se basa en la idea de determinar
la posicion espacial de cualquier punto mediante una distancia y dos angulos. En consecuencia,
manteniendo como punto de origen la posicion de cada uno de los radares al igual que en las
coordenadas locales, un punto P quedara representado por un conjunto de 3 parametros que
localizaran cualquier punto en el espacio a partir de tres parametros.
Distancia. Distancia, en metros, del segmento que une la posicion del punto de origen con
la posicion donde se encuentra la aeronave objetivo.
Azimuth. Angulo de orientacion con respecto al eje de la coordenadas locales que apunta
al punto cardenal norte de la Tierra. Este angulo toma valores entre 0º y 360º.
Elevacion. Angulo que mide el nivel de elevacion del punto con respecto al plano formado
por los ejes Norte y Este de las coordenadas locales. Este angulo toma valores entre -90º y
90º.

20 CAPITULO 3. SISTEMAS DE COORDENADAS
Sin embargo, como se explicara a continuacion en la Seccion 3.3.1, la altitud real de la ae-
ronave con respecto a la superficie terrestre no podra ser contemplada mediante este sistema de
coordenadas. Por tanto, para poder definir las medidas de distancia, azimuth y altitud medidas
por un radar en un determinado instante temporal, sera necesario portar de manera independien-
te la altitud definida para el sistema de coordenadas geodesicas.
El proceso de conversion de coordenadas locales a esfericas puede encontrarse en el Anexo
A. La Figura 3.3 ilustra un ejemplo de un punto inicialmente definido en coordenadas locales
convertido a esfericas.
Figura 3.3: Conversion de coordenadas cartesianas a esfericas [7].
3.3.1. Problematica de las coordenadas esfericas
Una vez obtenidas las detecciones radar mediante la conversion a coordenadas esfericas,
cabe destacar que existira una cierta problematica relativa al angulo de elevacion obtenido.
Debido a que las coordenadas esfericas no contemplan la curvatura del elipsoide que repre-
senta a la Tierra, la elevacion obtenida sera relativa a un plano horizontal formado por el radar.
Este plano horizontal sera tangencial y con altura nula con respecto al elipsoide de referencia
unicamente en la posicion del radar. La Figura 3.4 ilustra la problematica descrita.

3.3. COORDENADAS ESFERICAS 21
Figura 3.4: Problematica de las coordenadas esfericas.
Puede comprobarse que debido a que la elevacion (ϕ) que se obtendra mediante las coor-
denadas esfericas no se correspondera a la elevacion del blanco con respecto a la superficie
elipsoidal (ϕ′), el calculo de la altitud de la aeronave (h) utilizando la elevacion medida no se
correspondera con la altitud real o verdadera (h′) de la misma sobre la superficie terrestre.
Como puede observarse en la Figura 3.5, en funcion de la lejanıa a la que se halle la aeronave,
sera habitual que el radar haga detecciones en las que la elevacion y la altitud con respecto al
plano horizontal medidas por el radar tomen valores negativos.
Figura 3.5: Deteccion de altura negativa de la aeronave.
En consecuencia, la altitud de una aeronave no podra ser determinada unicamente a partir
del parametro de elevacion detectada por los radares. Por ello, la estimacion del parametro de
altitud se lleva a cabo por la propia aeronave mediante medidas barometricas, siendo capaces de
estimar su altitud en funcion de la presion atmosferica detectada, para, posteriormente, enviarla
como respuesta al centro de control que interrogue al transpondedor de la aeronave en cuestion,
tal y como se ha descrito en la Seccion 2.2.1.2.
De esta manera, se resuelve el problema de deteccion de la altura de las aeronaves, ya que
este parametro se tomara a partir de interrogaciones del radar secundario y de manera indepen-
22 CAPITULO 3. SISTEMAS DE COORDENADAS
diente a las detecciones de distancia y azimuth.
3.4. Proyeccion estereografica
Los sistemas de vigilancia con fusion de datos requieren que las medidas obtenidas por los
diferentes radares esten expresados en un sistema de coordenadas Cartesianas comun a la hora
de llevar a cabo la fusion de las medidas.
En escenarios que contemplen unicamente un espacio o area terrestre pequena, una suposi-
cion de un modelo de Tierra plana podrıa resultar valido, pudiendo recurrir a la utilizacion de
las coordenadas locales descritas en la Seccion 3.2 como sistema de coordenadas comun, ya
que todos los radares dibujaran un plano horizontal practicamente igual al encontrarse a distan-
cias cortas. Sin embargo, en escenarios de mayor magnitud como los que se van a tratar en este
proyecto, el sistema de coordenadas locales no podra ser utilizado para este proposito, ya que
sera necesario tener en cuenta la curvatura de la Tierra y los planos horizontales que dibujaran
los radares contemplados en el escenario no seran coincidentes.
Por otro lado, una vez que las trayectorias y las posiciones de los radares esten definidas en
coordenadas geodesicas, estos resultados deberan ser presentados en la pantalla del controlador
aereo, que se encargara de llevar a cabo las labores de vigilancia necesarias. Sin embargo, el
hecho de disponer de toda esta informacion sobre un sistema de coordenadas de 3 dimensiones,
puede dificultar la correcta visualizacion del escenario
Por estas razones, surge la necesidad de transformar las trayectorias y las posiciones de
los radares definidos en coordenadas geodesicas a algun sistema cartesiano de referencia, de
manera que el escenario actual pueda verse en su totalidad sobre un plano en lugar de sobre
una superficie elipsoidal. Una solucion tıpica es la utilizacion de las proyecciones azimutales,
que son capaces de representar las posiciones calculadas sobre una superficie curvada como el
elipsoide terrestre sobre un plano comun. Este tipo de sistemas facilitan tanto los calculos de
distancia y superficie ası como la visualizacion del escenario por parte de un controlador aereo
al mostrar las trayectorias y posiciones de los radares del escenario sobre un plano comun.
Las proyecciones azimutales se obtienen mediante el reflejo de la red de meridianos y para-
lelos de las coordenadas geodesicas ya descritas sobre un plano tangente a la Tierra, y desde un
determinado foco de luz. Sin embargo, en funcion de la posicion de este foco de luz, se podran
diferenciar multiples tipos de proyecciones azimutales.

3.4. PROYECCION ESTEREOGRAFICA 23
El tipo de proyeccion escogida en este proyecto ha sido la estereografica, cuyo foco de luz
es el punto del elipsoide diametralmente opuesto al punto de tangencia del plano con la propia
elipsoide. La eleccion del punto de tangencia sera de gran importancia ya que correspondera
al punto central del plano proyectado. El concepto de proyeccion estereografica se ilustra en
la Figura 3.6. Puede verse que si el plano sobre el cual se quiere hacer la proyeccion fuera
tangente al polo norte del elipsoide terrestre, el foco de luz estarıa situado en el polo sur de la
esfera, desde el cual se podran llevar a cabo la reflexion multiples puntos del elipsoide sobre el
plano.
Figura 3.6: Proyeccion estereografica [8].
La posicion del punto P’ con latitud φ y longitud λ correspondiente a la proyeccion del
punto P sobre el plano viene definida por el sistema de ecuaciones presentado en [8], donde
el conjunto (x, y) definen en plano estereografico y k es un factor escalar. Los parametros a
y e se tomaran,respectivamente, los valores del semieje mayor y la excentricidad del elipsoide
descrito en la Seccion 3.1.1, mientras que φ0 y λ0 se corresponderan a la latitud y longitud del
punto central o tangencial escogido.
x = k cos(χ) sin(λ− λ0) (3.2)
y = k[cos(χ0) sin(χ)− sin(χ0) cos(χ) cos(λ− λ0)] (3.3)
k = Acos(χ)
am(3.4)
donde,
A =2am0
cos(χ0)(1 + sin(χ0) sin(χ) + cos(χ0) cos(χ) cos(λ− λ0))(3.5)

24 CAPITULO 3. SISTEMAS DE COORDENADAS
m =cos(φ)
(1− e sin(φ))(3.6)
m0 =cos(φ0)
(1− e sin(φ0))(3.7)
Los parametros, χ0 y χ se corresponden a los valores de latitud aparente del punto tangencial
y del punto a reflejar, respectivamente. Podran calcularse a partir de las ecuacion 3.8, donde
φN = φ0 si se desea calcular χ0 y φN = φ si se desea calcular χ.
χN = 2 arctan(tan(π
4+φN2
)((1− e sin(φN))
(1 + e sin(φN)))e2 )− π
2(3.8)

Capıtulo 4
Modelo de Error de las Medidas de
Radares Secundarios
Las medidas de los radares son afectadas por diferentes factores cuyo grado de impacto
puede ser diferente. Como consecuencia, cuando se utilizan diversos radares para cubrir una
determinada area, pueden producirse desalineamientos o diferencias entre las medidas de cada
uno que pueden llegar a provocar un comportamiento inadecuado del sistema. Estos errores son
conocidos como sesgos.
Este capıtulo introduce el modelo de sesgos planteado en [9] para las detecciones de Radares
de Vigilancia Secundarios (SSR). Este modelo se utilizara para el proceso de generacion de
datos que se detallara en el Capıtulo 5. Por otra parte, ejercera ademas de base para llevar a
cabo el proceso de estimacion y posterior correccion de los sesgos de cada radar tal y como se
detallara en el Capıtulo 6.
El modelo de medicion viene definido por,
ρm = ρ+ nρ + ∆ρ
θm = θ + nθ + ∆θ (4.1)
hm = h+ nh + ∆h
donde los terminos ρ, θ y h representan las medidas de distancia, azimuth y altitud ideales
respectivamente, mientras que nρ, nθ y nh representan un ruido blanco gaussiano que afectara
a estos parametros. Por su parte, los terminos ∆ρ, ∆θ y ∆h representaran los sesgos o errores
sistematicos debidos a una mala calibracion del sistema.
25

26 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS
Estos sesgos se describen a partir de diferentes modelos matematicos cuyos parametros cam-
bian a lo largo del tiempo en funcion de factores como las condiciones meteorologicas o el
envejecimiento de los radares. Por ello, este modelo permitira la estimacion dinamica de los
parametros de sesgo en sistemas de fusion de datos radar.
4.1. Sesgo en Azimuth
El sesgo en azimuth puede modelarse como el cumulo de errores producidos por desapunta-
mientos de la antena y errores de calibracion del codificador optico del radar [9].
En esta seccion se describiran los tres diferentes grupos que componen el sesgo en azimuth.
En primer lugar se describira el sesgo causado debido a una desviacion de la antena, represen-
tado como ∆θant. A continuacion, se detallara el sesgo proveniente del desvıo de los ejes de
rotacion de la antena, ∆θaxis. Por ultimo, se especificara el termino de sesgo producido por un
error de calibracion del codificador optico del radar, representado por el termino ∆θenc.
Finalmente, una vez obtenidas las expresiones matematicas para cada termino de sesgo, el
azimuth medido (θm) podra ser obtenido mediante la expresion (4.2), donde θ representa el
azimuth ideal [9].
θm = θ + ∆θm,ant + ∆θm,axis + ∆θm,enc (4.2)
4.1.1. Desviacion del Eje la Antena
El primer factor que afecta al sesgo en azimuth es la orientacion erronea de la perspectiva de
la antena debido a desajustes entre la antena y el eje de rotacion de la misma.
Para determinar la desviacion de la antena, se definira un nuevo sistema de coordenadas
denominado Sistema de Coordenadas de Antena que se describe de la siguiente manera:
Eje Y: Coincidente con la perspectiva de la antena.
Eje Z: Eje ideal de rotacion de la antena.
Eje X: Ortogonal a los ejes Y y Z y positivo hacia la derecha.

4.1. SESGO EN AZIMUTH 27
Figura 4.1: Coordenadas de Antena.
La Figura 4.1 ilustra este nuevo sistema de coordenadas. Cabe destacar que, el sistema ro-
tara sobre el eje Z conjuntamente con la antena a medida que esta lleva a cabo el escaneo de
las aeronaves. Por lo tanto, considerando antenas bidimensionales que detectan las aeronaves
unicamente en su lobulo principal, el Sistema de Coordenadas de Antena vendra definido por
medio del sistema de ecuaciones (4.3).
x = 0
y = ρ cosϕ (4.3)
z = ρ sinϕ
Cabe destacar que asumiendo que la antena detectara blancos unicamente en su lobulo prin-
cipal, el eje X del Sistema de Coordenadas de Antena no tomara valores al ser ortogonal al Eje
Y. Ademas, al ser un sistema que rota conjuntamente con la antena, este sistema no diferenciara
el azimuth de los blancos, por lo que este parametro no influira en la definicion de ninguno de
los valores de los ejes (x, y, z).
Para el calculo del azimuth real medido contemplando la desviacion de la antena, se llevara
a cabo una serie de rotaciones sobre el sistema ideal (x, y, z) para transformarlo a un nuevo
sistema sesgado (x′, y′, z′) en funcion de los siguientes angulos de rotacion [9]:
Offset en Azimuth(θ0): Error generado con la rotacion de la antena en el plano horizontal.
A medida que la antena rota, es posible que se genere un sesgo constante en azimuth que
afectara por igual a todas las detecciones del radar.
Estrabismo de Antena sant: Desvıo o inclinacion del eje de rotacion de la antena.

28 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS
Inclinacion de Antena tant: Error producido por la inclinacion o rotacion de la antena en
el plano YZ.
Figura 4.2: a) Offset en Azimuth b) Estrabismo de la Antena c) Inclinacion de la Antena [9].
A partir de estos parametros, las matrices de rotacion quedaran definidas de la siguiente
manera [9].
Rz(θ0) =
cos(θ0) sin(θ0) 0
− sin(θ0) cos(θ0) 0
0 0 1
(4.4)
Rx(tant) =
1 0 0
0 cos(tant) − sin(tant)
0 sin(tant) cos(tant)
(4.5)
Ry(sant) =
cos(sant) 0 − sin(sant)
0 1 0
sin(sant) 0 cos(sant)
(4.6)
Aplicando las matrices, el nuevo Sistema de Coordenadas de Antena sesgado (x′, y′, z′) se
define mediante la expresion (4.7).
x′
y′
z′
= Rx(tant) ·Ry(sant) ·Rz(θ0)
x
y
z
(4.7)

4.1. SESGO EN AZIMUTH 29
El calculo del azimuth medido (θm,axis) se define como (4.8), en base al proceso transforma-
cion de coordenadas locales a esfericas descrito en el Anexo A.
θm,ant = arctanx′
y′(4.8)
A fin de obtener una aproximacion lineal de esta expresion, que sera de utilidad para llevar a
cabo el proceso de estimacion de este parametro de sesgo, el resultado se linealiza mediante una
serie de Taylor multidimensional sobre las variables θ0, sant y tant. La ecuacion (4.9) representa
esta aproximacion considerando unicamente los terminos de primer orden, donde ϕ representa
la elevacion ideal de la aeronave con respecto a la antena.
θm,ant = θ + θ0 − sant tan(ϕ) cos(θ) + tant tan(ϕ) sin(θ) (4.9)
Como ya se ha mencionado, dado que la antena detectara unicamente aeronaves en su lobulo
principal (θ ≈ 0) a medida que va rotando, (4.9) resultara en la ecuacion (4.10).
∆θm,ant = θm,ant − θ
∆θm,ant = θ0 − sant tan(ϕ) (4.10)
4.1.2. Desvıo de los Ejes de Rotacion
El error causado por el desvıo de los ejes se corresponde a la inclinacion que sufre el eje de
rotacion debido a la falta de ortogonalidad con la superficie de la Tierra sobre la que se situa el
radar.
Pese a que el efecto es similar al causado por el error de desviacion de antena descrito
anteriormente en la Seccion 4.1.1, este caso no contemplara rotaciones sobre el propio eje Z, ya
que el desvıo del sistema de ejes vendra provocado unicamente por la inclinacion sufrida sobre
el plano formado por los ejes X e Y. Por ello, el sistema de coordenadas referente en este caso
sera el propio sistema de coordenadas locales ENU y no hara falta definir un nuevo sistema de
caracter dinamico como el descrito para sesgo por desviacion de la antena [9].

30 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS
Figura 4.3: Desvıo de los ejes de rotacion del radar [9].
La Figura 4.3 ilustra el nuevo sistema de coordenadas (x’,y’,z’) que se obtendra tras las rota-
ciones aplicadas sobre el sistema de coordenadas locales ideales (x,y,z) utilizando las matrices
de rotacion (4.11) y (4.12).
Rx(taxis) =
1 0 0
0 cos(taxis) − sin(taxis)
0 sin(taxis) cos(taxis)
(4.11)
Ry(saxis) =
cos(saxis) 0 − sin(saxis)
0 1 0
sin(saxis) 0 cos(saxis)
(4.12)
El nuevo sistema de coordenadas sesgado contemplando el desvıo de los ejes vendra definido
por lo tanto por siguiente ecuacion:
x′
y′
z′
= Rx(taxis) ·Ry(saxis)
x
y
z
(4.13)
Finalmente, el calculo del azimuth medido (θm,axis) se define a partir de una expresion analo-
ga a (4.8).

4.1. SESGO EN AZIMUTH 31
Al igual que en el calculo de la componente de sesgo por desvıo de la antena descrita en
la Seccion 4.1.1, este resultado puede linealizarse con una serie multidimensional de Taylor
de primer orden sobre las variables sant y tant. De esta manera, se obtendra una aproximacion
lineal mediante la expresion (4.14). A partir de este resultado, el termino de sesgo debido a la
desviacion de los ejes de rotacion viene definido por (4.15).
θm,axis ≈ θ + taxis tan(ϕ) sin(θ)− saxis tan(ϕ) cos(θ) (4.14)
∆θm,axis ≈ [taxis sin(θ)− saxis cos(θ)] tan(ϕ) (4.15)
4.1.3. Error de Calibracion del codificador optico
El azimuth de la perspectiva de la antena se determina mediante un codificador optico ubi-
cado en el eje de rotacion de la misma. Sin embargo, debido a la complejidad y precision que
requiere su instalacion, es comun que se produzcan pequenos errores de calibracion que se
traducen en sesgos en azimuth.
Figura 4.4: Codificador optico con sesgo por excentricidad [9].
Uno de los errores con mayor impacto producido por este error de calibracion es el sesgo por
excentricidad del codificador. La Figura 4.4 muestra una instalacion imprecisa de un codificador

32 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS
optico que provocara que el centro de rotacion del radar (O) no se corresponda con el centro
geometrico del codificador (O’), lo cual supondra cometer errores de medida en azimuth.
Siguiendo la deduccion presentada en [9], el azimuth medido teniendo en cuenta el sesgo
por excentricidad (θm,enc) puede expresarse mediante la ecuacion (4.16).
θm,enc1 ≈ θ − ∆R
Rsin(θ) (4.16)
Por otro lado, la calibracion erronea del codificador optico con respecto al plano horizontal
del radar condicionara otro de los sesgos de azimuth.
Este desajuste provocara que la proyeccion a 2D de la circunferencia del codificador se
refleje como una elipse en el plano horizontal. Pese a que el azimuth ideal es representado en
el plano horizontal, el realmente medido se obtiene por medio del encoder rotado. Por lo tanto,
este desajuste supondra un error en la medida de del azimuth de la aeronave cuando no coincida
con el semieje mayor de esta elipse.
Este efecto se ilustra en la Figura 4.5. En la imagen de la izquierda se muestra un codificador
optico mal calibrado sobre el plano X-Y’, mientras que la linea de puntos sobre el plano X-Y re-
presentarıa la proyeccion del mismo. Por otro lado, en la imagen de la derecha la circunferencia
se corresponde a la proyeccion de un codificador optico calibrado perfectamente con respecto al
plano horizontal mientras que la elipse representa la proyeccion teniendo en cuenta el desajuste
de calibracion.
Figura 4.5: Codificador optico con sesgo por desajuste respecto al plano horizontal [9].

4.1. SESGO EN AZIMUTH 33
En base a la Figura 4.5, el valor de las componentes x, y, ym viene dada por,
x = r sin(θm) (4.17)
ym = r cos(θm) (4.18)
y = ym cos(senc) (4.19)
Partiendo de estas ecuaciones, la relacion entre θ y θm viene dada por la ecuacion (4.20), de
la cual se deduce la expresion (4.21) para el azimuth medido θm.
θ = arctan(x
y) = arctan(
tan(θm)
cos(senc)) (4.20)
θm = arctan(cos(senc) tan(θ)) (4.21)
Siguiendo la deduccion presentada en [9], la aproximacion lineal de esta componente del
sesgo de azimuth queda definida por 4.22 , siendo s2enc el angulo de inclinacion o desajuste del
codificador optico.
θm,enc2 ≈ θ − s2enc
4sin(2θ) (4.22)
Finalmente, combinando las expresiones (4.16) y (4.22) podra obtenerse una expresion para
el sesgo provocado por el error de calibracion de codificador optico. Sin embargo, en las Figuras
4.4 y 4.5 se ha considerado que tanto la excentricidad como la inclinacion de desajuste del co-
dificador se corresponden al eje X o, equivalentemente, al eje de azimuth igual a 0. Suponiendo
que los angulos de diferencia de excentricidad y del desajuste por inclinacion con respecto al
eje X vienen expresados por αecc y αenc respectivamente, la expresion del sesgo provocado por
el error de calibracion viene dada por la expresion (4.23).
∆θm,enc = −s2enc
4sin(2θ − 2αenc)−
∆R
Rsin(θ − αecc) (4.23)
Sin embargo, la expresion (4.23) puede sufrir problemas de linealidad en determinadas partes
del modelo. Por tanto, sera conveniente traducir esta ecuacion a la expresion (4.24) aplicando
identidades trigonometricas.

34 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS
∆θm,enc = senc,s sin(2θ) + senc,s sin(2θ) + ∆Ry∆sin(θ)−∆Rxcos(θ) (4.24)
donde,
senc,s =s2enc sin2(αenc)− s2
enc cos2(αenc)
4
senc,c = s2enc cos(αenc) sin(αenc)
∆Rx =∆R
Rsin(αecc)
∆Ry =∆R
Rcos(αecc)
4.1.4. Composicion del Sesgo en Azimuth
Combinando los terminos (4.10), (4.15) y (4.24), se obtiene finalmente el modelo matemati-
co del sesgo en azimuth, que queda descrito mediante la expresion (4.25).
∆θ = θ0 − sant tan(ϕ) + [taxis sin(θ)− saxis cos(θ)] tan(ϕ) (4.25)
− senc,s sin(2θ) + senc,s sin(2θ) + ∆Ry∆sin(θ)−∆Rxcos(θ)
4.2. Sesgo en Distancia
El sesgo en distancia puede venir afectado por diversos factores, siendo los listados a conti-
nuacion los mas relevantes [9]:
Error de Referencia Temporal (∆ρ0): Como ya se ha descrito en la Seccion 2.2.1, los
radares secundarios calculan la distancia en base a la diferencia de tiempo desde el envıo
de la interrogacion hasta la recepcion de la misma. Sin embargo, es frecuente que los
radares cometan un pequeno error constante debido a imprecisiones en el establecimiento
de referencias temporales, produciendo un desvıo constante en el calculo de la distancia.
Error del Reloj (αclk): Pequenos errores de calibracion en los relojes de los radares pueden
producir un error proporcional a la distancia real. Sin embargo, en sistemas modernos la
precision es lo suficientemente buena como para considerar este termino como desprecia-
ble.
Retardo del Transpondedor (∆ρdelay): Los transpondedores de los aviones pueden provo-
car un error en distancia de distribucion uniforme de entre -75 y 75 metros. Sin embargo,

4.2. SESGO EN DISTANCIA 35
como este modelo va a tratar escenarios con multiples blancos, el valor medio de esta
componente tenderıa a un valor cercano a 0, por lo que no se considerara en el modelo a
describir.
Error de Propagacion (∆ρprop): La relacion entre la diferencia de tiempos de la interro-
gacion y la respuesta y la distancia se hace utilizando la velocidad de la luz de acuerdo
a las especificaciones de la ISA (Atmosfera Estandar Internacional) a nivel del mar. Sin
embargo, este valor varıa a lo largo del camino de propagacion de acuerdo a cambios del
ındice de refraccion en determinadas alturas y condiciones climatologicas, produciendo
ası un nuevo termino de sesgo variable.
Considerando estos factores y descartando los terminos ∆ρdelay y αclk por las razones ya men-
cionadas, el modelo de sesgos de distancia quedara de acuerdo a la expresion (4.26).
∆ρ = ∆ρ0 + ∆ρprop (4.26)
Mientras que el termino ∆ρ0 sera constante para todas las medidas, ∆ρprop sera variable y
dependiente de diferentes condiciones que se detallan a continuacion en la Seccion 4.2.1.
4.2.1. Error de Propagacion
La variacion del ındice de refraccion de la atmosfera en funcion de la altitud afectara de
manera directa a la velocidad de la luz. Dado que los calculos de conversion de tiempo entre
interrogacion y recepcion a distancia se llevan a cabo utilizando el valor estandar de la velocidad
de la luz, se cometeran errores de calculo proporcionales a la propia distancia y la altitud a las
que se encuentre la aeronave, denominados errores de propagacion.
El modelo de refractividad exponencial descrito en [10] modela las variaciones atmosfericas
en funcion de la altitud en base a la ecuacion (4.27), por lo que es muy utilizada en aplicaciones
radar. El valor de refractividad N(h) dado para una altitud h viene definido por una altitud de
referencia H = 6950m y el ındice de refraccion a nivel del mar Ns que tıpicamente recibe un
valores entorno a 300 y 350.
N(h) = Ns exp(− hH
) (4.27)
La relacion entre la refractividad N(h) y el ındice de refraccion n(h) para una altitud h viene
definido por:
n(h) = 1 +N(h) · 10−6 (4.28)
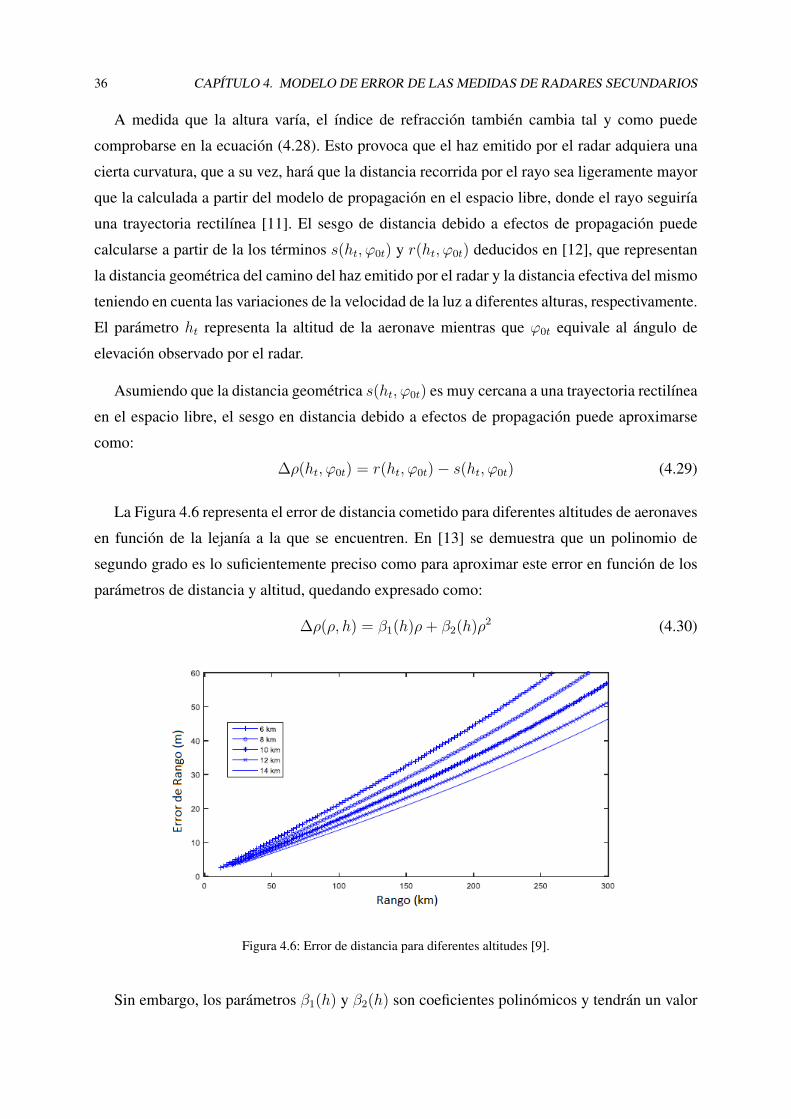
36 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS
A medida que la altura varıa, el ındice de refraccion tambien cambia tal y como puede
comprobarse en la ecuacion (4.28). Esto provoca que el haz emitido por el radar adquiera una
cierta curvatura, que a su vez, hara que la distancia recorrida por el rayo sea ligeramente mayor
que la calculada a partir del modelo de propagacion en el espacio libre, donde el rayo seguirıa
una trayectoria rectilınea [11]. El sesgo de distancia debido a efectos de propagacion puede
calcularse a partir de la los terminos s(ht, ϕ0t) y r(ht, ϕ0t) deducidos en [12], que representan
la distancia geometrica del camino del haz emitido por el radar y la distancia efectiva del mismo
teniendo en cuenta las variaciones de la velocidad de la luz a diferentes alturas, respectivamente.
El parametro ht representa la altitud de la aeronave mientras que ϕ0t equivale al angulo de
elevacion observado por el radar.
Asumiendo que la distancia geometrica s(ht, ϕ0t) es muy cercana a una trayectoria rectilınea
en el espacio libre, el sesgo en distancia debido a efectos de propagacion puede aproximarse
como:
∆ρ(ht, ϕ0t) = r(ht, ϕ0t)− s(ht, ϕ0t) (4.29)
La Figura 4.6 representa el error de distancia cometido para diferentes altitudes de aeronaves
en funcion de la lejanıa a la que se encuentren. En [13] se demuestra que un polinomio de
segundo grado es lo suficientemente preciso como para aproximar este error en funcion de los
parametros de distancia y altitud, quedando expresado como:
∆ρ(ρ, h) = β1(h)ρ+ β2(h)ρ2 (4.30)
Figura 4.6: Error de distancia para diferentes altitudes [9].
Sin embargo, los parametros β1(h) y β2(h) son coeficientes polinomicos y tendran un valor

4.2. SESGO EN DISTANCIA 37
diferente para cada altitud. Por ello, el modelo de la ecuacion (4.30) no es el mas adecuado,
ya que la mayorıa de las aeronaves detectadas en cada medida estara volando a distintas altitu-
des y los coeficientes β1 y β2 no seran los mismos para cada aeronave. En otras palabras, solo
se podrıan utilizar detecciones de aeronaves con la misma altitud para la estimacion de estos
coeficientes y proceder al calculo del sesgo en distancia debido a la propagacion. Sera recomen-
dable, por tanto, tratar de hallar un modelo que permita el uso simultaneo de todas las medidas
detectadas, independientemente de la altitud [9].
Una idea clave consistirıa en el desacoplo de las dependencias de distancia y altitud, de
manera que la ecuacion (4.30) pudiera traducirse como,
∆ρ(ρ, h) = f(ρ) · g(h) (4.31)
Para ello, el cociente entre una parabola a una determinada altitud h y otra a una altitud de
referencia hr escogida de manera arbitraria queda expresada como:
g(ρ, h) =∆ρ(ρ, h)
∆ρ(ρ, hr)(4.32)
A partir de las ecuaciones (4.31) y (4.32) podra deducirse la expresion (4.33). Puede ob-
servarse que, f(ρ) es una funcion no dependiente de h, ya que el valor de hr sera conocido
[9].
f(ρ) = ∆ρ(ρ, hr) = β1(hr)ρ+ β2(hr)ρ2 = α1ρ+ α2ρ
2 (4.33)
Figura 4.7: Cociente entre el sesgo en distancia a una determinada altitud h y el sesgo a una altitud referencia
hr = 14000m en funcion del valor de la altitud h [9].
Por otro lado, con el fin de obtener la funcion g(h), la Figura 4.7 representa el cociente

38 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS
entre el sesgo en distancia a una determinada altitud h y el sesgo a una altitud de referencia
hr = 14000 metros. En esta Figura 4.7 puede apreciarse que el cociente puede ser aproximado
mediante un modelo lineal. Por tanto, g(h) puede modelarse como una funcion lineal de h
normalizada a la altitud de referencia hr:
g(ρ, h) =∆ρ(ρ, h)
∆ρ(ρ, hr)≈ 1 + α3(1− h
hr) (4.34)
Finalmente, combinando las expresiones (4.31), (4.33) y (4.34), el sesgo en distancia causa-
do por la propagacion se modela de acuerdo a la ecuacion (4.35) [9].
∆ρprop = (α1ρ+ α2ρ2)[1 + α3(1− h
hr)] (4.35)
Finalmente, una vez obtenida la expresion matematica del error de propagacion causante del
sesgo en distancia, la expresion (4.26), quedara representada por,
∆ρ = ∆ρ0 + (α1ρ+ α2ρ2)[1 + α3(1− h
hr)] (4.36)
4.3. Sesgo en Altitud
Debido a la problematica presentada en la Seccion 3.3.1, la altitud de las aeronaves de-
tectadas se determina por medio de interrogaciones a la propia aeronave, ya que mediante el
parametro de elevacion determinado por el radar no serıa posible calcular la altitud correcta.
Siguiendo la descripcion presentada en [9], es posible diferenciar dos tipos de altitudes para
una aeronave:
Altitud Geometrica: Viene determinada por la distancia euclıdea entre el Nivel Promedio
del Mar (MSL) y la altitud a la que se encuentra la aeronave. Describe, por lo tanto, la
altura ideal a la que se encuentra una determinada aeronave y serıa posible de estimar por
medio del parametro de elevacion unicamente si se considerara un modelo de Tierra plana.
Altitud Barometrica: Este concepto describe la altitud calculada a partir la presion at-
mosferica detectada por el barometro con el que se equipa a una aeronave. Es el tipo de
altitud utilizado por los sistemas de Control de Trafico Aereo.
La altitud barometrica podra o no coincidir con la altura geometrica. Esta coincidencia ocu-
rrira unicamente cuando las condiciones atmosfericas sobre las que se encuentra la aeronave

4.3. SESGO EN ALTITUD 39
coincidan con las descritas por el modelo de la Atmosfera Estandar Internacional (ISA), que se
resumen de la siguiente manera [14]:
g0 = 9, 80665ms2
. Aceleracion estandar por la gravedad.
p0 = 101325Pa. Presion atmosferica.
T0 = 288, 15K. Temperatura.
a0 = 340, 294ms
. Velocidad del sonido.
Esta diferencia entre ambos tipos de altitudes introduce un termino de sesgo, cuyo efecto
podra ser notable al realizar la proyeccion estereografica de las medidas radar. El impacto de este
sesgo sera practicamente despreciable cuando la aeronave se detecta a una elevacion cercana a 0
al encontrarse cerca del plano de proyeccion. Sin embargo, este factor podra llegar a introducir
un error notable en la proyeccion cuando la aeronave se encuentra a una corta distancia con
respecto al radar y, en consecuencia, a una elevacion alta. Este efecto se describe graficamente
en la Figura 4.8, donde puede verse la diferencia entre las proyecciones ρmp y ρp producidas
por una altitud medida sesgada (hm) y la ideal (h), respectivamente para un mismo valor de
distancia (ρ).
Figura 4.8: Error de proyeccion producido por el sesgo de altitud [9].
El parametro de sesgo de la altitud que caracteriza la diferencia entre las altitudes de tipo
geometrica y barometrica sera dependiente de las condiciones atmosfericas. Siguiendo el mo-
delo propuesto en [14], se definen las ecuaciones (4.37) y (4.38), que determinan la relacion

40 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS
entre la altitud geometrica (hg) y barometrica (hp) en funcion de si la aeronave se encuentra por
debajo o por encima de la Tropopausa, ubicada a una altitud de 11000 metros con respecto al
nivel del mar.
Por debajo de la Tropopausa:
hg = hp −∆Hp +∆T
βTln(
T0 + βThpT0 + βT∆Hp
) (4.37)
Por encima de la Tropopausa:
hg = hg,trop +T0 + ∆T + βThp,trop
T0 + βThp,trop(hp − hp,trop) (4.38)
donde,
βT es un gradiente de temperatura constante para cada capa atmosferica.
βT =
−6, 5 · 10−3[K/m], hp ≤ 11000[m]
0[K/m], hp ≥ 11000[m](4.39)
hg,trop es la altitud geometrica cuando al altitud barometrica hp,trop = 11000m.
∆Hp es la diferencia entre la altitud calculada a partir de una presion barometrica medi-
da a nivel del mar con respecto a la altitud estimada bajo las condiciones de ISA. Este
valor dependera, por tanto, de la relacion entre la presion barometrica medida y el valor
de p0 dado por las condiciones de ISA ya descritas. El calculo de este parametro viene
determinado por la siguiente expresion de acuerdo a [14].
∆Hp =T0
βT[(pMSL
p0
)βTR
g0 − 1] (4.40)
donde pMSL representa la presion medida a nivel del mar y R = 287, 05287 m2
Ks2es la
constante de gas especıfica dada por la ley de los gases ideales.
∆T es la diferencia entre la temperatura presente (T ) y la temperatura estandar al nivel del
mar (T0). El valor de la temperatura presente puede estimarse a partir de (4.41).
T = Tb + βT (H −Hb) (4.41)
donde,
Tb =
T0[K], hp ≤ 11000[m]
216, 65[K], hp > 11000[m](4.42)
Hb =
0[m], hp ≤ 11000[m]
11000[m], hp > 11000[m](4.43)

4.3. SESGO EN ALTITUD 41
A fin de reducir el impacto de los sesgos de altitud en las proyecciones en el plano horizontal,
∆T y ∆Hp han de ser estimadas y corregidas. Para ello, [9] desarrolla un modelo lineal que
relacione las altitudes de tipo geometrica y barometrica en base al modelo de [14] presentado
previamente por medio de las ecuaciones (4.37) y (4.38).
Por debajo de la Tropopausa:
Utilizando la aproximacion lineal ln(1 + x) ≈ x cuando x ≈ 0 en el termino ln(1 +T0+βT hpT0+βT∆Hp
− 1) de la ecuacion (4.37), la ecuacion puede representarse como (4.44).
hg = hp −∆Hp +∆T
βT(T0 + βThp − T0 − βT∆Hp
T0 + βT∆Hp
) (4.44)
Aplicando operaciones algebraicas sobre (4.44), la ecuacion puede ser resolverse para hgy hp, resultando en (4.45) y (4.46), respectivamente.
hg = (hp −∆Hp)(1 +∆T
T0 + βT∆Hp
) (4.45)
hp =hg
1 + ∆TT0+βT∆Hp
+ ∆Hp (4.46)
Por encima de la Tropopausa:
Reagrupando los terminos de la expresion (4.38), se obtiene la siguiente expresion:
hg = hg,trop + (1 +∆T
T0 + βThp,trop)(hp − hp,trop) (4.47)
donde, hg,trop puede calcularse particularizando hp = hp,trop en la ecuacion (4.45).
Finalmente, resolviendo de manera algebraica la expresion (4.47) para hp, la ecuacion
resulta en (4.48).
hp =hg − hg,trop
1 + ∆TT0+βT hp,trop
+ hp,trop (4.48)

42 CAPITULO 4. MODELO DE ERROR DE LAS MEDIDAS DE RADARES SECUNDARIOS

Capıtulo 5
Descripcion Funcional del Sistema
En este capıtulo se va a proceder a describir el diseno y operacion del esquema funcional
planteado para llevar a cabo los objetivos del proyecto descritos en la Seccion 1.1.
La Figura 5.1 ilustra el esquema de bloques y el procedimiento operacional del sistema
disenado. Como se ha mencionado anteriormente, el proyecto distingue dos etapas en las que se
va a trabajar con datos de diferente ındole. En primer lugar, las K trayectorias de las aeronaves
y los N radares con las que se trabajara se generaran para un escenario planteado de manera
arbitraria, mientras que las detecciones de estos radares, generadas matematicamente, se veran
alteradas en base al modelo de error que se detallara en el Capıtulo 4. Esta etapa de generacion
requerira la consecucion de un procedimiento que se engloba en el Bloque de Generacion de
Datos. Por otro lado, a fin de llevar el sistema a un escenario mas realista, se trabajara tambien
con medidas de radares reales, recogidos por un determinado Centro de procesado de Datos.
Es por ello por lo que el esquema presentado distingue ambos casos como datos de entrada al
Bloque de Procesado de Datos.
A lo largo de las siguiente secciones se procedera a describir los diferentes bloques presen-
tados en la Figura 5.1 ası como las funcionalidades contempladas para cada uno de ellos.
43

44 CAPITULO 5. DESCRIPCION FUNCIONAL DEL SISTEMA
Figura 5.1: Esquema de diseno y operacion del sistema planteado.

5.1. BLOQUE DE GENERACION DE DATOS 45
5.1. Bloque de Generacion de Datos
Esta seccion describira las diferentes etapas o procedimientos a realizar para llevar a cabo
la generacion de datos radar simulados. A lo largo de este proceso, se recurrira al uso de los
diferentes sistemas de coordenadas descritos en el Capıtulo 3 y al modelo de error presentado
en el Capıtulo 4.
5.1.1. Generacion de Trayectorias
El objetivo de esta etapa consiste en el calculo de las trayectorias que seguiran cada una
de las aeronaves que se deseen contemplar en el escenario. La posicion de las aeronaves a lo
largo de su correspondiente trayectoria se actualizara en terminos de latitud, longitud y altitud
(Φ(t), λ(t), h(t)) del Sistema de Coordenadas Geodesico, ya descrito en la Seccion 3.1, para
cada instante temporal muestreado. Como se detallara posteriormente, la composicion de estas
trayectorias se llevara a cabo utilizando cırculos maximos [15] para los tramos rectilıneos y
cırculos mınimos [16] para los tramos de giro de la aeronave.
Figura 5.2: Esquema de del proceso de generacion de la trayectoria de una determinada aeronave.
Para llevar a cabo este proceso, sera necesaria la definicion previa de una serie de parametros

46 CAPITULO 5. DESCRIPCION FUNCIONAL DEL SISTEMA
que permitan el posterior calculo de la trayectoria completa de cada una de las aeronaves. La
Figura 5.2 presenta un esquema de esta etapa en la que los parametros a definir son:
Codigo: Identificador de la aeronave que recorrera la trayectoria a definir.
Posicion Inicial de la Aeronave (Φ0, λ0, h0): Describen la posicion inicial desde la cual
partira la aeronave en terminos de latitud, longitud y altitud iniciales.
Velocidad Inicial (v0): Velocidad en ms
a la cual se encuentra la aeronave en la posicion
inicial (Φ0, λ0, h0).
Azimuth Inicial (θ0): Angulo de orientacion con respecto al norte de referencia de la Tierra
con el que parte la aeronave desde la posicion (Φ0, λ0, h0).
Definicion de Tramos: La descripcion de la trayectoria se realizara a partir de cuatro vec-
tores de misma longitud:
• Vector de Intervalos: Define la duracion de los diferentes intervalos temporales de los
que esta compuesta la trayectoria de la aeronave.
• Vector de Aceleraciones Longitudinales: Aceleraciones lineales sufridas por el avion
a lo largo de su eje longitudinal en cada uno de los intervalos temporales.
• Vector de Aceleraciones Transversales: Aceleraciones sufridas por la aeronave en su
eje tangencial para cada intervalo temporal. Estas aceleraciones generaran los giros
del avion.
• Vector de Aceleraciones Verticales: Aceleraciones sobre el eje vertical de la aeronave,
que provocara cambios en la altitud de la misma.
Por simplicidad, se consideraran unicamente dos tipos de tramos. Los primeros seran tramos
rectilıneos que podran o no sufrir aceleraciones longitudinales. Por otro lado, para simular cur-
vas de las aeronaves, se consideraran tramos circulares recorridos a velocidad constante, en los
que no exista ningun tipo de aceleracion adicional mas alla de la transversal. Por ello, conti-
nuando con el esquema de la Figura 5.2, el primer paso para calcular las trayectorias consistira
en diferenciar el tipo de tramo.
En caso de tratarse de un tramo de movimiento rectilıneo, se calcularan los vectores de dis-
tancia recorrida x(t), velocidad v(t) y aceleracion a(t) para cada instante temporal muestreado
utilizando las formulas cinematicas (5.1) y (5.2), donde t es el intervalo temporal entre mues-
tras, ti es el instante de tiempo actual y ti−1 es el instante temporal anterior.

5.1. BLOQUE DE GENERACION DE DATOS 47
v(ti) = v(ti−1) + a(ti)t (5.1)
x(ti) = x(ti−1) + v(ti−1)t+1
2a(ti)t
2 (5.2)
Conocido el vector de distancias, el punto inicial y el rumbo de la aeronave (que se man-
tendra constante para una trayectoria rectilınea), las posiciones de latitud y longitud podran ser
obtenidas mediante cırculos maximos [15] sobre una esfera modelada con la forma de la Tierra
a partir del modelo WGS84. Los puntos de latitud y longitud que conforman el tramo seran los
del arco que une el punto inicial con otro desplazado a una determinada distancia en la direccion
marcada por el rumbo sobre el cırculo maximo.
Por otro lado, si se tratara de un tramo circular, se aplicarıa la teorıa de los cırculos mınimos
sobre la superficie terrestre para conocer los puntos de la trayectoria de la aeronave [16]. Co-
nocidas la velocidad y la aceleracion transversal sufridas por la aeronave a lo largo del tramo,
pueden calcularse tanto el radio del cırculo que se dibujara sobre la superficie terrestre como
la velocidad angular a la que se circulara sobre el mismo. Los puntos de latitud y longitud que
conforman este tipo de tramos seran los del arco que une el punto inicial con otro desplazado
una determinada seccion del cırculo mınimo en funcion del tiempo transcurrido girando a la
velocidad angular calculada.
Cabe destacar que, para cada uno de los tramos, los valores de posicion y azimuth iniciales
se corresponderan a los del ultimo punto del tramo anterior. Por lo tanto, una vez finalizados los
calculos de un determinado tramo, los valores iniciales del siguiente deberan ser actualizados.
5.1.2. Descripcion de los Radares
Tras la definicion de las trayectorias, sera necesario describir tambien las caracterısticas de
los radares que se deseen contemplar en el escenario. Para ello, los parametros necesarios a
concretar para cada uno de los radares seran los siguientes:
Posicion del Radar (ΦR, λR, hR): Definicion de la posicion en latitud, longitud y altitud
(coordenadas geodesicas) del radar.
Azimuth Inicial (θ0,R): Angulo de orientacion inicial del radar con respecto al norte terres-
tre.
Velocidad de Giro (vgiro): Velocidad angular con la que girara el radar sobre su propio eje.
Puede expresarse en revoluciones por minuto.

48 CAPITULO 5. DESCRIPCION FUNCIONAL DEL SISTEMA
Ruidos de Medida (nρ, nθ): Desviaciones tıpicas de los ruidos de deteccion con los que el
radar toma las medidas de distancia y azimuth.
5.1.3. Simulacion de Medidas
Una vez las trayectorias y los radares se encuentren correctamente definidas, se procedera al
calculo de las medidas que cada uno de los radares detectara a lo largo del tiempo en el escenario
descrito. Esta seccion describe el procedimiento necesario para llevar a cabo esta tarea.
En primer lugar, conocidas las posiciones en coordenadas geodesicas tanto de cada radar n
(ΦRn , λ
Rn , h
Rn ) como las de cada trayectoria k en funcion del tiempo (Φk(t), λk(t), hk(t)), sera
necesario referir las medidas de cada una de las trayectorias a cada uno de los radares. Para ello,
sera necesario llevar a cabo una transformacion de coordenadas del sistema geodesico a coorde-
nadas esfericas descritas en el Capıtulo 3. Como ya se ha visto, este sistema permitira describir
cada trayectoria en terminos de distancia, azimuth y elevacion (ρn,k(t), θn,k(t), ϕn,k(t)) con
respecto al radar objetivo, cuya posicion pasara a ser el origen de este nuevo sistema de coorde-
nadas, emulando de esta manera los parametros de deteccion del radar. Dado que el parametro
de altitud no es determinado propiamente por el radar, simplemente se conservara el valor h(t)
del sistema de coordenadas geodesico.
Por lo tanto, conociendo la velocidad de angular del radar y el azimuth de la trayectoria con
respecto al radar en cada instante de tiempo, el objetivo sera encontrar los puntos en los que el
azimuth al que este apuntando el radar coincida con el de la trayectoria a medir. La Figura 5.3
muestra un ejemplo visual de esta tarea.
Figura 5.3: Generacion de detecciones radar.
La linea verde representa el giro del radar, cuyo azimuth se mueve de manera constante y
periodica entre 0 y 2π radianes en base de su velocidad de giro. Por otra parte, la linea azul

5.1. BLOQUE DE GENERACION DE DATOS 49
representa el azimuth al que se encontrara la trayectoria para cada instante de tiempo. En conse-
cuencia, los puntos a considerar como medidas vendran definidos por los instantes de tiempo en
los cuales el azimuth de la trayectoria y el del radar sean coincidentes y la distancia a la que se
encuentre la aeronave con respecto al radar sea inferior a su alcance maximo. De esta manera,
las medidas quedaran registradas en base a la distancia, azimuth y elevacion correspondientes a
un determinado instante de tiempo de medida.
5.1.4. Sesgar Medidas y Adicion del Ruido de Medida
Tras llevar a cabo el procedimiento presentado en los apartados anteriores, se habran obte-
nido las deteccion que cada radar medira a lo largo de un determinado tiempo de simulacion.
Sin embargo, estas medidas seran ideales y no se emularan a las de los radares reales, que su-
fren perturbaciones causadas por ruido y sesgos del propio radar. El siguiente paso, por lo tanto
consistira en distorsionar las medidas para adecuarlas a la realidad.
Para llevar a cabo esta tarea, sera necesario anadir los parametros que describan la magnitud
de estas perturbaciones a la descripcion de los radares. Por lo tanto, ademas de los parametros
de ruido de medicion ya mencionados en la Seccion 5.1.2, sera necesario definir, para cada
radar, los parametros o caracterısticas que sesgaran las medidas tomadas.
En primer lugar, a partir de las desviaciones tıpicas introducidas, se generaran senales de
ruido blanco que se anadiran a las medidas ideales ya obtenidas.
Por ultimo, a partir del modelo presentado en el Capıtulo 4, se generaran sesgos de medida
que se anadiran nuevamente a las medidas ideales a fin de alterarlas y obtener detecciones que
imiten en al maximo posible un escenario realista.
ρreal = ρideal + ∆ρ (5.3)
θreal = θideal + ∆θ (5.4)
hreal = hideal + ∆h (5.5)
donde ∆ρ y ∆θ podran obtenerse a partir de las expresiones 4.36 y 4.25, respectivamente. Por
su parte, la altitud barometrica (o real) hreal podra ser calculada a partir de las expresiones 4.37
y 4.38 en funcion de si la altitud geometrica ideal hideal obtenida inicialmente supera o no la
altitud de la Tropopausa.

50 CAPITULO 5. DESCRIPCION FUNCIONAL DEL SISTEMA
5.1.5. Multiplexacion de Datos
Una vez se disponga de todas las detecciones reales que mide cada uno de los radares con-
siderados, el ultimo paso del bloque de generacion consistira en generar el flujo de datos que
llegarıa al centro de procesado de datos.
Figura 5.4: Multiplexacion de datos radar.
En un escenario real, los radares enviaran constantemente medidas detectadas al centro de
procesado de datos. Por lo tanto, el flujo de datos que se recibira en funcion del tiempo estara
compuesto por las medidas de todos los radares del escenario con respecto a cualquiera de las
trayectorias.
Existiran diversas maneras en las que los radares envıan las medidas al Centro de Procesado
de Datos. Por un lado, es habitual que los radares envıen las medidas por bloques que agrupan

5.2. BLOQUE DE PROCESADO DE DATOS 51
las multiples detecciones realizadas en un determinado intervalo azimutal y temporal. Sin em-
bargo en este proyecto se ha optado por escoger el metodo en el cual los radares enviaran las
detecciones a medida que la realicen, de manera que el Centro de Procesado de Datos las reciba
cronologicamente.
El objetivo de esta etapa sera, por tanto, generar este trafico de datos multiplexando cro-
nologicamente las detecciones de los diferentes radares en un unico flujo.
La Figura 5.4 muestra un esquema del proceso de generacion del flujo de datos entrante
al centro de control para un escenario simple en el que se dispone unicamente de 3 radares y
4 trayectorias de aeronaves. En base a los instantes de tiempo en los que cada radar tome las
multiples muestras de cada una de las trayectorias del escenario, se obtiene un trafico de datos
que alterna medidas de diferentes radares con respecto a cualquier trayectoria ordenadas en el
tiempo, donde t1 < t2 < ... < tM siendo M es el numero total de muestras medidas por todos
los radares del escenario.
5.2. Bloque de Procesado de Datos
Una vez obtenido del flujo de datos procedente de los radares, ya sea a partir de datos simu-
lados o de un escenario real, se procede al procesado de estos datos.
El Bloque de Procesado de Datos emulara por tanto las funciones de los centro de control
de trafico aereo. Su objetivo sera realizar la estimacion y correccion de los sesgos de los que
sufre cada radar y llevar seguimiento de cada una de las trayectorias atendiendo a las medidas
recibidas por parte de todos los radares.
5.2.1. Asociacion de Medidas
La primera tarea a realizar a medida que las detecciones del flujo de datos vayan recibiendose
consistira en relacionar cada una de las medidas recibidas tanto al radar de procedencia como
la trayectoria o aeronave a la que se corresponde. La Figura 5.5 esquematiza este proceso de
asociacion.
Tal y como se ha mencionado en la Seccion 3.4, los sistemas de vigilancia con fusion de da-
tos requieren que todas las medidas obtenidas se definan bajo sistema de coordenadas comun.
Sin embargo, los datos radar recibidos en el centro de control vendran definidos por parametros
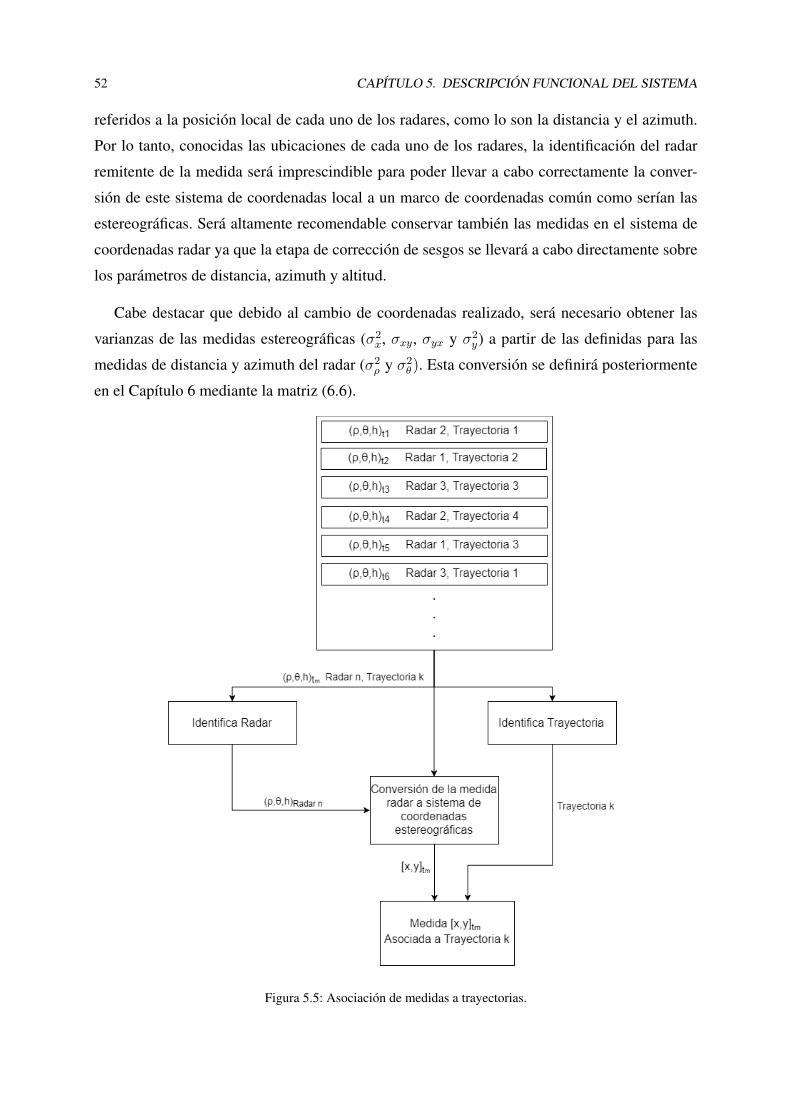
52 CAPITULO 5. DESCRIPCION FUNCIONAL DEL SISTEMA
referidos a la posicion local de cada uno de los radares, como lo son la distancia y el azimuth.
Por lo tanto, conocidas las ubicaciones de cada uno de los radares, la identificacion del radar
remitente de la medida sera imprescindible para poder llevar a cabo correctamente la conver-
sion de este sistema de coordenadas local a un marco de coordenadas comun como serıan las
estereograficas. Sera altamente recomendable conservar tambien las medidas en el sistema de
coordenadas radar ya que la etapa de correccion de sesgos se llevara a cabo directamente sobre
los parametros de distancia, azimuth y altitud.
Cabe destacar que debido al cambio de coordenadas realizado, sera necesario obtener las
varianzas de las medidas estereograficas (σ2x, σxy, σyx y σ2
y) a partir de las definidas para las
medidas de distancia y azimuth del radar (σ2ρ y σ2
θ). Esta conversion se definira posteriormente
en el Capıtulo 6 mediante la matriz (6.6).
Figura 5.5: Asociacion de medidas a trayectorias.

5.2. BLOQUE DE PROCESADO DE DATOS 53
Finalmente, habiendo definido la medida en coordenadas estereograficas, sera necesario
identificar en la propia medida el codigo de la aeronave detectada, de manera que la detec-
cion pueda asociarse a una determinada trayectoria. Es importante tener en consideracion que
en escenarios reales existira la posibilidad de recibir un mismo codigo identificador por parte
de dos aeronaves diferentes. Por tanto, para estos casos, se implementara, una asociacion por
posicion adicional a la asociacion por codigo ya definida, que deterine a que aeronave pertenece
realmente la medida en cuestion.
5.2.2. Estimacion de Sesgos
Como ya se ha mencionado, para poder llevar a cabo correctamente la fusion de datos en sis-
temas multirradar sera necesario llevar a cabo una correccion de los sesgos que sufren las medi-
das de los diferentes radares contemplados. Para ello, el bloque de Estimacion de los Parametros
Sesgos de la Figura 5.1 implementa un algoritmo capaz de estimar una serie de parametros a
partir de los cuales se podran calcular los sesgos que afectan a las medidas de cada uno de los
radares.
En escenarios reales, factores como el desgaste de los componentes pueden provocar que el
sesgo de los radares varıe con el paso del tiempo. Por ello, se optara por implementar un metodo
iterativo que permita estimar recursivamente los parametros de sesgo correspondientes a cada
radar a partir de un determinado trafico de oportunidad.
Los parametros a estimar por el filtro son aquellos que componen el modelo de sesgos pre-
sentado en el Capıtulo 4 y deberan ser estimados simultaneamente para los diferentes radares
a medida que cada uno vaya recibiendo sus correspondientes medidas de una misma aeronave.
Como ya se ha descrito en la etapa de asociacion de medidas (Seccion 5.2.1), para el correcto
funcionamiento del algoritmo de estimacion sera necesario que las medidas radar esten referidas
en un sistema de coordenadas comun, como las estereograficas.
Sin embargo, ya que los sesgos de altitud vienen dados por los errores cometidos por los
barometros de las aeronaves y no por los propios radares, los parametros correspondientes al
sesgo de altitud (5.7) se computaran de manera independiente a los de distancia y azimuth (5.6)
y se consideraran comunes para todas las aeronaves.
bradari =[
∆ρ0 α1 α2 α3 ∆θ0 sant taxis saxis ∆Rx ∆Ry senc,c senc,s
]T(5.6)
batm =[
∆Hp ∆T]T
(5.7)

54 CAPITULO 5. DESCRIPCION FUNCIONAL DEL SISTEMA
Dado que la finalidad de este filtro yace en estimar los parametros necesarios para corregir y
alinear cada una de las trayectorias sesgadas entorno a la idealmente seguida por la aeronave, el
algoritmo iterativo a implementar se denominara Filtro de Alineamiento. Debido a su comple-
jidad y a representar el objetivo principal del proyecto, su diseno y proceso de implementacion
se detallaran en profundidad en el Capıtulo 6.
5.2.3. Correccion de la Medida
Los parametros de sesgo de los vectores (5.6) y (5.7) estimados por el Filtro de Alineamiento
seran utilizados para aplicar una correccion sobre las medidas radar recibidas. Como ya se ha
mencionado, el Filtro de Alineamiento lleva a cabo la estimacion de parametros utilizando las
medidas radar proyectadas al plano estereografico. Sin embargo, estos parametros se utilizaran
para corregir las medidas de distancia, azimuth y altitud de cada radar, por lo que sera necesa-
rio haber guardado o retornar nuevamente a las medidas en este sistema de coordenadas para
llevar a cabo la correccion. Para ello, aplicando el modelo de error presentado en el Capıtulo 4,
las componentes de sesgo, azimuth y altitud medidas por el radar seran corregidas a un valor
teoricamente insesgado si las estimaciones de los parametros han resultado ser correctas.
Para realizar la correccion, se sustituiran los parametros estimados en las ecuaciones (4.10),
(4.15) y (4.24) del modelo de sesgos para, posteriormente, aplicar el termino de correccion de
sesgo correspondiente a las medidas de distancia, azimuth y altitud de cada radar.
ρcorregido = ρm,sesgado −∆ρestimado
θcorregido = θm,sesgado −∆θestimado (5.8)
hcorregido = hm,sesgado −∆hestimado
5.2.4. Seguimiento de Trayectorias
A medida que se vayan obteniendo las detecciones radar corregidas en sesgo, se llevara a
cabo un proceso de asociacion entre la medida y su trayectoria correspondiente, de manera que
los datos puedan ser presentados en la pantalla del controlador aereo. El objetivo sera fusionar
todos los reportes de detecciones radar independientes de una misma aeronave en una unica
trayectoria. A partir de las posiciones obtenidas y el seguimiento de trayectorias contemplado,
el controlador aereo supervisara la correcta separacion entre aeronaves a fin de evitar colisiones
entre las mismas.
5.3. DATOS DE RADARES REALES 55
Sin embargo, incluso asumiendo un caso perfecto de alineamiento total de las trayectorias
tras el proceso de correccion de sesgos, las detecciones seguiran estando afectadas por un deter-
minado ruido de medida, pudiendo provocar saltos bruscos de posicion y velocidad a lo largo
de la trayectoria que dificulten la funcion del controlador. Por tanto, sera necesario implementar
un filtro que sea capaz de realizar el seguimiento de las trayectorias a mostrar en la pantalla del
controlador de manera optima incluso cuando estas medidas recibidas esten sometidas a ruido
blanco.
En este proyecto se contemplara unicamente el seguimiento de las trayectorias sobre un
plano horizontal como el estereografico. Sin embargo, cabe destacar que los sistemas de Control
de Trafico Aereo reales implementan un segundo filtro que lleva a cabo el seguimiento de la
aeronave sobre un plano vertical a fin de seguir correctamente los desplazamientos en altitud de
las aeronaves.
En este proyecto, se ha optado por la implementacion de un filtro Interacting Multiple Model
(IMM) como sistema de seguimiento, ya que es considerado como uno de los algoritmos con
mejor relacion coste-efectividad para el seguimiento de aeronaves [17]. Este sistema basa su
modo de operacion en la combinacion de multiples modelos de Filtros de Kalman (Anexo B),
distinguiendo diferentes modelos para las fases de vuelo rectilıneas y las de giros o maniobra.
Su diseno e implementacion se detallan en profundidad en el Capıtulo 7.
De esta manera, gracias al proceso de filtrado del algoritmo IMM, se proporcionara al con-
trolador una vision adecuada del espacio aereo a partir de trayectorias generadas por procesado
multirradar, pudiendo ası aprovechar su alta tasa de actualizacion para facilitar y llevar a cabo
las tareas de vigilancia de la manera mas eficiente posible.
5.3. Datos de Radares Reales
Una vez se haya comprobado que la utilizacion de los filtros disenados mejoran los resulta-
dos mostrados en la consola del controlador, se sustituiran los datos de entrada de tipo generados
(o modelados) por datos recogidos por radares de vigilancia aerea reales.
La utilizacion de este tipo de datos permitira verificar la validez del modelo de errores de
alineamiento descrito en el Capıtulo 4 y permitira corroborar que el sistema no solo funciona
correctamente con datos radar generados sino que tambien es capaz de hacerlo con datos de
radares reales, cuyos sesgos no se conocen de antemano.

56 CAPITULO 5. DESCRIPCION FUNCIONAL DEL SISTEMA

Capıtulo 6
Filtro de Alineamiento
La correccion de los errores o sesgos de medida cometidos por los radares en sistemas que
implementan procesado multirradar es vital para poder llevar a cabo la fusion de datos correc-
tamente. Debido a que cada radar sufrira de sesgos de diferente magnitud, la utilizacion de
multiples radares para medir una misma trayectoria podra provocar la aparicion de multiples
trayectorias ficticias para una unica aeronave. Este efecto se ilustra conceptualmente en la Figu-
ra 6.1, donde las lineas de color representan la trayectoria medida por cada uno de los radares
sesgados con coberturas solapadas, mientras que la linea de puntos representarıa la trayectoria
seguida realmente por la aeronave.
Figura 6.1: Aparicion de trayectorias ficticias en escenarios multirradar.
57
58 CAPITULO 6. FILTRO DE ALINEAMIENTO
Sera necesario, por lo tanto, llevar a cabo una estimacion de la magnitud de los errores
que comete cada radar para poder aplicar ası una correccion sobre los medidas recibidas en el
centro de control. Sin embargo, debido a pequenas imperfecciones de instalacion y desgaste
de los componentes, los sesgos seran cambiantes con el paso del tiempo, impidiendo ası que
las correcciones aplicadas a las medidas sea puedan mantenerse constantes. Por ello, en este
proyecto se optara por un metodo de estimacion de parametros iterativo, de manera que los
sesgos puedan ser constantemente calculados a partir un determinado trafico existente.
Este capitulo describe en profundidad el diseno del filtro que se va a utilizar para la estima-
cion de los sesgos de cada uno de los radares. El filtro estimara una serie de parametros que
podran utilizarse de manera recursiva para aplicar una correccion sobre las medidas sesgadas
de los radares, de manera que las diferentes trayectorias ficticias visualizadas por cada radar
queden alineadas al maximo posible entre sı.
6.1. Asincronismo y Generacion de Conjuntos de Medidas
El proceso de estimacion los sesgos de un determinado radar utilizando unicamente sus pro-
pias medidas se antoja imposible. Al no disponer de fuentes que proporcionen opciones de
trayectorias alternativas, los procesadores rastreadores locales asumiran siempre que sus medi-
das son insesgadas. En otras palabras, los estimadores o procesadores locales desconoceran los
sesgos del propio radar, lo que hace necesaria la utilizacion de medidas de una misma aeronave
procedentes de multiples radares para posibilitar la estimacion de estos sesgos.
El algoritmo del Filtro de Alineamiento disenado en este proyecto utilizara constantemente
el residuo entre dos medidas de una misma aeronave detectadas por dos radares independientes
y con sesgos no necesariamente similares. Sin embargo, es importante tener en cuenta que las
medidas reportadas por estos radares generalmente seran asıncronas en el tiempo.
El efecto de este asincronismo se ilustra en la Figura 6.2, que muestra los instantes tempora-
les en los que dos radares independientes y sesgados miden la misma trayectoria. Puede verse
que los instantes de medida por parte de los radares i y j contemplados son diferentes.
Por lo tanto, para obtener un residuo que se aproxime al maximo posible al que se obtendrıa
si los radares fueran sıncronos, sera necesario interpolar el instante temporal de uno de los
radares al del segundo radar. Para poder llevar a cabo este proceso de interpolacion, la entrada
al filtro estara compuesta por un Conjunto de Medidas de una misma aeronave recogidas por
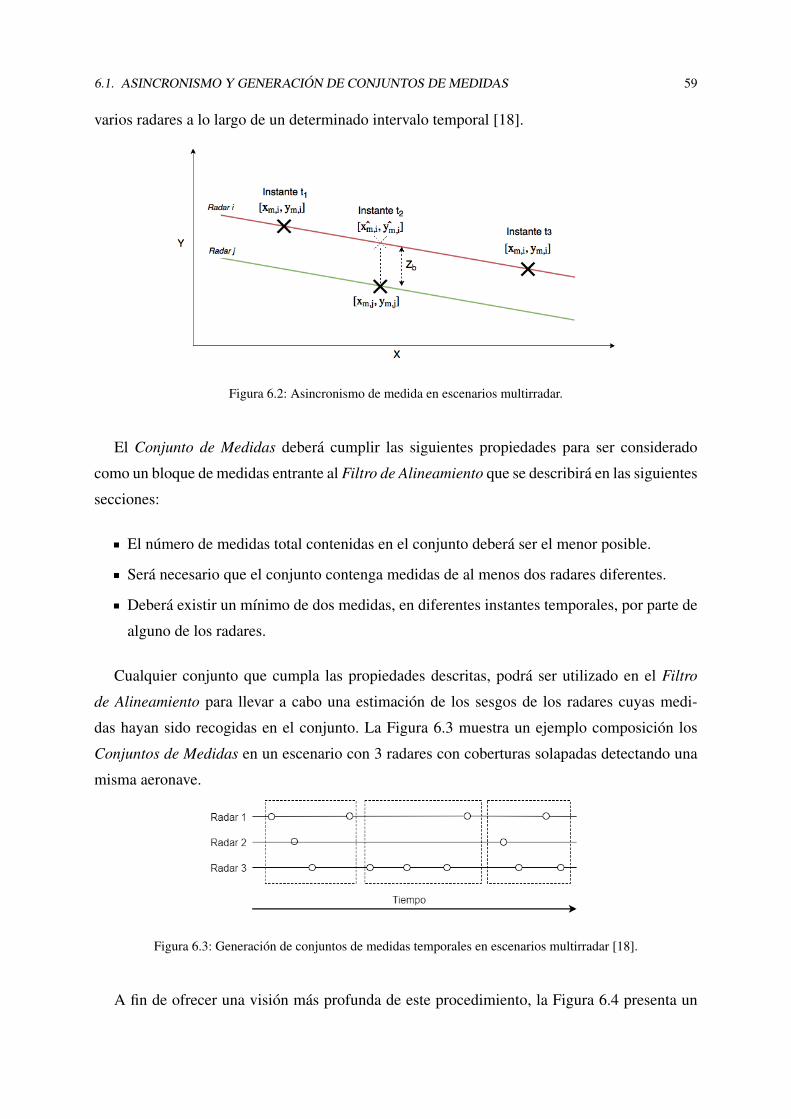
6.1. ASINCRONISMO Y GENERACION DE CONJUNTOS DE MEDIDAS 59
varios radares a lo largo de un determinado intervalo temporal [18].
Figura 6.2: Asincronismo de medida en escenarios multirradar.
El Conjunto de Medidas debera cumplir las siguientes propiedades para ser considerado
como un bloque de medidas entrante al Filtro de Alineamiento que se describira en las siguientes
secciones:
El numero de medidas total contenidas en el conjunto debera ser el menor posible.
Sera necesario que el conjunto contenga medidas de al menos dos radares diferentes.
Debera existir un mınimo de dos medidas, en diferentes instantes temporales, por parte de
alguno de los radares.
Cualquier conjunto que cumpla las propiedades descritas, podra ser utilizado en el Filtro
de Alineamiento para llevar a cabo una estimacion de los sesgos de los radares cuyas medi-
das hayan sido recogidas en el conjunto. La Figura 6.3 muestra un ejemplo composicion los
Conjuntos de Medidas en un escenario con 3 radares con coberturas solapadas detectando una
misma aeronave.
Figura 6.3: Generacion de conjuntos de medidas temporales en escenarios multirradar [18].
A fin de ofrecer una vision mas profunda de este procedimiento, la Figura 6.4 presenta un

60 CAPITULO 6. FILTRO DE ALINEAMIENTO
diagrama de flujo del proceso de generacion de los conjuntos de medida de entrada al filtro.
Figura 6.4: Diagrama de flujo de generacion de conjuntos de medidas.
Como ya se ha mencionado anteriormente, el Filtro de Alineamiento disenado trabajara so-
bre el sistema de coordenadas estereograficas, por lo que esta sera el primer paso a seguir una
vez se reciba una determinada medida radar. Tras leer el identificador de la trayectoria detectada
(Trayectoria k), la medida se anadira a un Conjunto de Medidas correspondiente a esta trayec-
toria. El conjunto ira acumulando medidas hasta que cumpla las condiciones necesarias para
ser utilizado por el Filtro de Alilneamiento. Tras enviar las medidas al algoritmo de estimacion,
el conjunto correspondiente a la Trayectoria k se reiniciara y comenzara a acumular nuevas
medidas hasta volver a cumplir las condiciones descritas.

6.2. MODELO DEL FILTRO 61
6.2. Modelo del Filtro
El filtro sigue las bases del modelo presentado en [9] y plantea hacerlo escalable a entornos
con un elevado numero de radares con coberturas solapadas.
Como ya se ha mencionado en la Seccion 5.2.2, el objetivo que se plantea para este filtro
es la estimacion de los diferentes parametros del modelo de error presentado en el Capıtulo
4. Considerando N el numero de radares totales del escenario contemplado, los parametros a
estimar estaran contenidos en el siguiente vector columna:
b =
bradar1
...
...
bradarN
batm
(6.1)
donde,
bradari =[
∆ρ0 α1 α2 α3 ∆θ0 sant taxis saxis ∆Rx ∆Ry senc,c senc,s
]T(6.2)
batm =[
∆Hp ∆T]T
(6.3)
Puede verse que el vector (6.1) no particulariza los parametros de sesgo de altitud para cada
uno los radares, como sı lo hace con los de distancia y azimuth. Como ya se ha visto en la
Seccion 4.3, el termino de altitud es estimado utilizado barometros de la propia aeronave y su
sesgo viene dado por las condiciones atmosfericas en las que se encuentre la aeronave. Por
tanto, este tipo de sesgo es independiente a los propios radares. En este proyecto, se considerara
que todas las aeronaves se encuentran bajo las mismas condiciones atmosfericas, por lo que los
parametros ∆Hp y ∆T se consideraran comunes a todos los barometros.
La estimacion de los parametros indicados, se llevara a cabo utilizando el residuo entre
medidas de una misma aeronave detectada por varios radares en un mismo instante temporal.
Para ello, a la entrada del filtro se dispondra de las componentes de posicion de la aeronave
medidas por cada radar proyectadas a coordenadas estereograficas, que pueden modelarse de la
siguiente manera:
Zm,i =
[xm,i
ym,i
]=
[x
y
]+Hb,ibi +Hb,atmbatm +
[wx
wy
](6.4)

62 CAPITULO 6. FILTRO DE ALINEAMIENTO
A partir de la expresion 6.4, el vector de residuos entre las medidas sesgadas de dos radares
puede definirse mediante,
Zb = Zm,i − Zm,j (6.5)
La composicion de matrices Hb,i y Hb,atm se detalla en profundidad en la Seccion 6.4. Por
su parte, las componentes (x, y) definen la posicion ideal en la que se encuentra la aeronave,
mientras que (xm,i, ym,i) se corresponden a la posicion estereografica deducida a partir de las
medidas un determinado radar i.
Las componentes wx y wy representan el ruido gaussiano blanco para las componentes x e
y respectivamente, que resultan de la proyeccion a coordenadas estereograficas de los ruidos de
medida (nρ, nθ, nh) indicados en el sistema de ecuaciones (4.1). Conocidos los valores de las
desviaciones estandar de las medidas de distancia y azimuth para cada radar (σρ, σθ), la matriz
de covarianzas de una determinada medida del Radar i vendra representada por (6.6) de acuerdo
a [18].
Ri(k) =
[(ρm,i)
2σ2θ cos(θm,i) + σ2
ρ sin(θm,i) (σ2ρ − (ρm,i)
2σ2i ) sin(θm,i) cos(θm,i)
(σ2ρ − (ρm,i)
2σ2i ) sin(θm,i) cos(θm,i) (ρm,i)
2σ2θ sin(θm,i) + σ2
ρ cos(θm,i)
](6.6)
Como ya se ha descrito en la Seccion 6.1, las medidas realizadas por radares diferentes con
respecto a una misma aeronave rara vez van a ser coincidentes en el tiempo, lo cual va a suponer
que el residuo de medida entre dos radares no se calcule correctamente.
De esta manera, la expresion (6.5), que serıa valida unicamente en entornos de detecciones
sıncronas, pasara a representarse por (6.7), siendo Zm,i la medida del radar i interpolada al
instante de medida del radar j.
Zb = Zm,i − Zm,j (6.7)
La medida Zm,i quedara definida necesariamente por 2 medidas Zm,i tomadas en diferentes
instantes de tiempo. Por lo tanto, la ecuacion (6.7) puede expresarse de acuerdo a la siguiente
expresion,
Zb = [µ1Zm,i(t1) + µ2Zm,i(t3)]− Zm,j(t2) (6.8)
donde
µ1 = t3−t2t3−t1 (6.9)
µ2 = t2−t1t3−t1 (6.10)
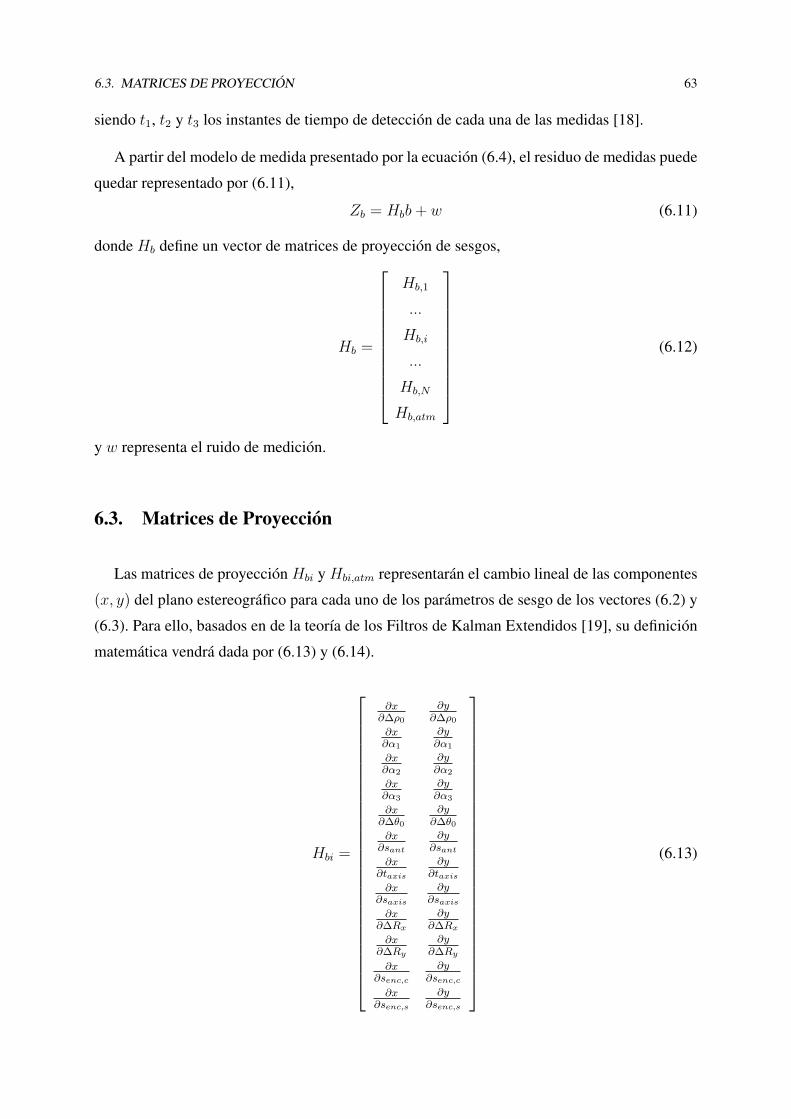
6.3. MATRICES DE PROYECCION 63
siendo t1, t2 y t3 los instantes de tiempo de deteccion de cada una de las medidas [18].
A partir del modelo de medida presentado por la ecuacion (6.4), el residuo de medidas puede
quedar representado por (6.11),
Zb = Hbb+ w (6.11)
donde Hb define un vector de matrices de proyeccion de sesgos,
Hb =
Hb,1
...
Hb,i
...
Hb,N
Hb,atm
(6.12)
y w representa el ruido de medicion.
6.3. Matrices de Proyeccion
Las matrices de proyeccion Hbi y Hbi,atm representaran el cambio lineal de las componentes
(x, y) del plano estereografico para cada uno de los parametros de sesgo de los vectores (6.2) y
(6.3). Para ello, basados en de la teorıa de los Filtros de Kalman Extendidos [19], su definicion
matematica vendra dada por (6.13) y (6.14).
Hbi =
∂x∂∆ρ0
∂y∂∆ρ0
∂x∂α1
∂y∂α1
∂x∂α2
∂y∂α2
∂x∂α3
∂y∂α3
∂x∂∆θ0
∂y∂∆θ0
∂x∂sant
∂y∂sant
∂x∂taxis
∂y∂taxis
∂x∂saxis
∂y∂saxis
∂x∂∆Rx
∂y∂∆Rx
∂x∂∆Ry
∂y∂∆Ry
∂x∂senc,c
∂y∂senc,c
∂x∂senc,s
∂y∂senc,s
(6.13)

64 CAPITULO 6. FILTRO DE ALINEAMIENTO
Hbi,atm =
[∂x
∂∆Hp
∂y∂∆Hp
∂x∂∆T
∂y∂∆T
](6.14)
Una vez formado el Conjunto de Medidas para una determinada trayectoria de acuerdo al
procedimiento presentado en la Seccion 6.1, se calcularan las matrices de proyeccion corres-
pondientes a cada una de las medidas que componen el conjunto.
Dado que los parametros de sesgo a estimar estan contenidos en las expresiones matemati-
cas de distancia, azimuth y altitud medidas, sera necesario encontrar la relacion entre los ejes
del plano estereografico (x, y) y las coordenadas radar (ρ, θ, h). Sin embargo, como ha podido
comprobarse en la Seccion 3.4, la relacion matematica entre estos dos sistemas de coordena-
das puede resultar muy compleja, por lo que el calculo de las derivadas resultarıa altamente
laborioso.
A fin de facilitar estos calculos, sera conveniente realizar el calculo de las derivadas sobre
el sistema de coordenadas locales ENU para, posteriormente, aplicar a la matriz obtenida un
proceso de transformacion de coordenadas locales a estereograficas. De esta manera, las nuevas
matrices a calcular se definen como Gbi y Gbi,atm. Dado que el sistema de coordenadas locales
cuenta con 3 ejes, (X, Y, Z), estas matrices contaran con una columna adicional que las matrices
Hbi y Hbi,atm.
Gbi =
∂X∂∆ρ0
∂Y∂∆ρ0
∂Z∂∆ρ0
∂X∂α1
∂Y∂α1
∂Z∂α1
∂X∂α2
∂Y∂α2
∂Z∂α2
∂X∂α3
∂Y∂α3
∂Z∂α3
∂X∂∆θ0
∂Y∂∆θ0
∂Z∂∆θ0
∂X∂sant
∂Y∂sant
∂Z∂sant
∂X∂taxis
∂Y∂taxis
∂Z∂taxis
∂X∂saxis
∂Y∂saxis
∂Z∂saxis
∂X∂∆Rx
∂Y∂∆Rx
∂Z∂∆Rx
∂X∂∆Ry
∂Y∂∆Ry
∂Z∂∆Ry
∂X∂senc,c
∂Y∂senc,c
∂Z∂senc,c
∂X∂senc,s
∂Y∂senc,s
∂Z∂senc,s
(6.15)
Gbi,atm =
[∂X∂∆Hp
∂Y∂∆Hp
∂Z∂∆Hp
∂X∂∆T
∂Y∂∆T
∂Z∂∆T
](6.16)
Tal y como se demuestra en el Anexo A.2, la relacion entre las medidas en coordenadas radar

6.3. MATRICES DE PROYECCION 65
(ρm, θm, hm), junto con el parametro de elevacion y las coordenadas locales ENU (X, Y, Z)
utilizadas en este proyecto viene representada por,
X = ρm sin(θm) cos(ϕ) (6.17)
Y = ρm cos(θm) cos(ϕ) (6.18)
Z = ρm sin(ϕ) (6.19)
donde,
ρm = ρi + ∆ρ (6.20)
θm = θi + ∆θ (6.21)
ϕ = arcsin(2R(hm−hradar)+h2m−h2radar−ρ
2m
2ρm(R+hi)) (6.22)
siendo ρi y θi las medidas de distancia y azimuth ideales, respectivamente.
Las componentes de sesgo en azimuth (∆θ), distancia (∆ρ) y altitud (hm) se definen me-
diante las expresiones matematicas lineales (4.25), (4.36) y (4.46) obtenidas en el Capıtulo 4,
respectivamente. De esta manera, a partir de estas definiciones, se podra llevar a cabo el calculo
de las derivadas parciales de cada uno de los terminos contemplados para cada uno de los ejes
del sistema de coordenadas locales utilizado.
Una vez obtenidas las matrices Gbi y Gbi,atm, se les aplicara un proceso de cambio de coor-
denadas locales a estereograficas a fin de obtener las matrices Hbi y Hbi,atm deseadas. Esta tarea
se llevara a cabo mediante las expresiones (6.23) y (6.24).
Hbi = AStereoGeodeticBGeodeticECEF CECEF
Local Gbi (6.23)
Hbi,atm = AStereoGeodeticBGeodeticECEF CECEF
Local Gbi,atm (6.24)
donde
CECEFLocal es la matriz que transforma las componentes en coordeandas locales de las matri-
ces Gbi y Gbi,atm al sistema ECEF.
BGeodeticECEF es la matriz que transforma las componentes en ECEF al sistema geodesico de
referencia.
AStereoGeodetic es la matriz que proyecta los parametros referenciados en el sistema geodesico a
coordenadas estereograficas.
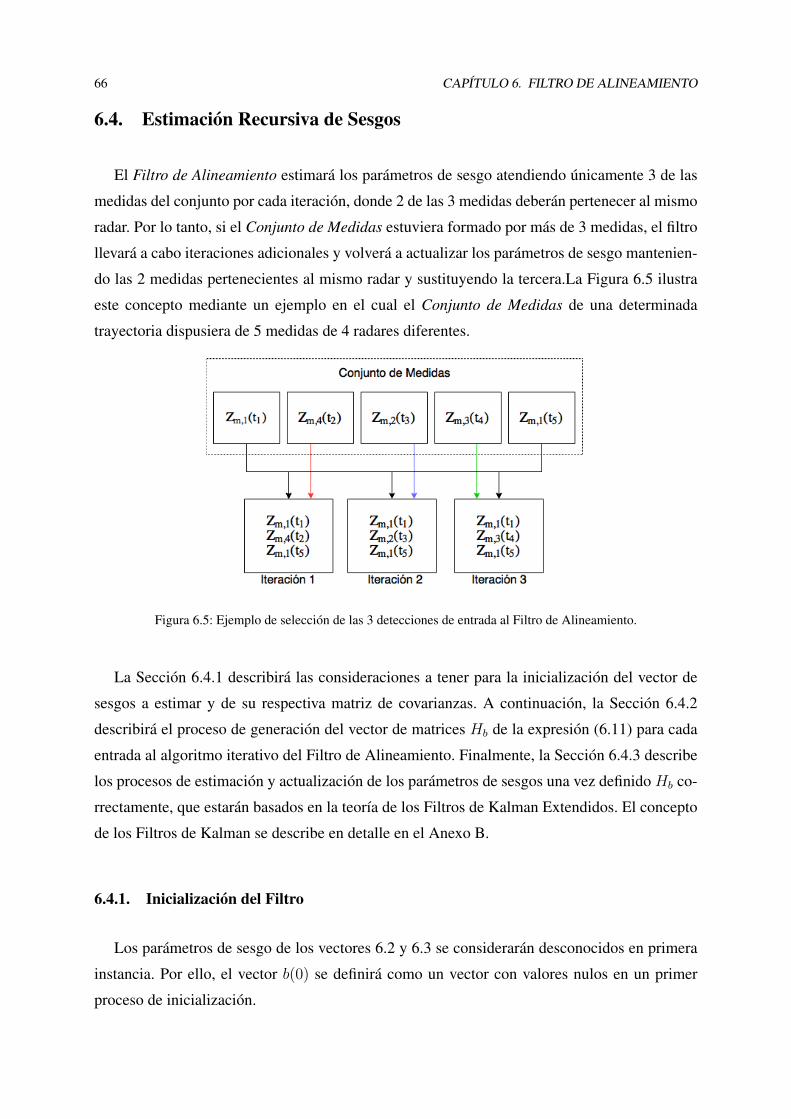
66 CAPITULO 6. FILTRO DE ALINEAMIENTO
6.4. Estimacion Recursiva de Sesgos
El Filtro de Alineamiento estimara los parametros de sesgo atendiendo unicamente 3 de las
medidas del conjunto por cada iteracion, donde 2 de las 3 medidas deberan pertenecer al mismo
radar. Por lo tanto, si el Conjunto de Medidas estuviera formado por mas de 3 medidas, el filtro
llevara a cabo iteraciones adicionales y volvera a actualizar los parametros de sesgo mantenien-
do las 2 medidas pertenecientes al mismo radar y sustituyendo la tercera.La Figura 6.5 ilustra
este concepto mediante un ejemplo en el cual el Conjunto de Medidas de una determinada
trayectoria dispusiera de 5 medidas de 4 radares diferentes.
Figura 6.5: Ejemplo de seleccion de las 3 detecciones de entrada al Filtro de Alineamiento.
La Seccion 6.4.1 describira las consideraciones a tener para la inicializacion del vector de
sesgos a estimar y de su respectiva matriz de covarianzas. A continuacion, la Seccion 6.4.2
describira el proceso de generacion del vector de matrices Hb de la expresion (6.11) para cada
entrada al algoritmo iterativo del Filtro de Alineamiento. Finalmente, la Seccion 6.4.3 describe
los procesos de estimacion y actualizacion de los parametros de sesgos una vez definido Hb co-
rrectamente, que estaran basados en la teorıa de los Filtros de Kalman Extendidos. El concepto
de los Filtros de Kalman se describe en detalle en el Anexo B.
6.4.1. Inicializacion del Filtro
Los parametros de sesgo de los vectores 6.2 y 6.3 se consideraran desconocidos en primera
instancia. Por ello, el vector b(0) se definira como un vector con valores nulos en un primer
proceso de inicializacion.

6.4. ESTIMACION RECURSIVA DE SESGOS 67
bradari(0) =
0
0
...
0
(6.25)
batm(0) =
[0
0
](6.26)
De la misma manera, sera necesario inicializar la matriz de covariazas P utilizada en a lo
largo del proceso iterativo de estimacion descrito posteriormente. Esta matriz se inicializara a
partir de (6.27), cuya diagonal esta formada a partir de las varianzas esperadas para cada uno de
los parametros de sesgo de los diferentes radares y para los terminos de sesgo de altitud.
P (0) =
σ21,∆ρ 0 ... 0 0 ... 0 0
0 σ21,α1
... 0 0 ... 0 0
.. ... ... ... ... ... ... ...
0 0 ... σ22,∆ρ 0 ... 0 0
0 0 ... 0 σ22,α1
... 0 0
... ... ... ... ... ... ... ...
... ... ... ... ... ... ... ...
0 0 ... 0 0 ... σ2∆H 0
0 0 ... 0 0 ... 0 σ2∆T
(6.27)
Las varianzas de esta matriz se definiran de manera arbitraria inicialmente. Dado que el vec-
tor de sesgos b se habra inicializado con valores nulos, estas varianzas se calcularan definiendo
la desviacion tıpica de cada parametro como un valor razonable o esperado a priori para cada
uno de los parametros de sesgo contemplados.
6.4.2. Composicion del Vector de Matrices de Proyeccion
Suponiendo que de las 3 medidas introducidas por iteracion al algoritmo 2 son pertenecientes
al Radar i y 1 al Radar j, las matrices Hb,i, Hb,j y Hb,atm seguiran la siguiente composicion,
Hb,i =[
(−µ1Hbi(t1)− µ2Hbi(t3))]
(6.28)
Hb,j =[Hbj(t2)
](6.29)

68 CAPITULO 6. FILTRO DE ALINEAMIENTO
Hb,atm =[
(−µ1Hbi,atm(t1)− µ2Hbi,atm(t2)) +Hbj,atm)]
(6.30)
donde t1 y t3 representan los instantes de medida de las 2 medidas correspondientes al Radar
i, mientras que t2 se corresponde al instante me medida del Radar j. Por su parte, el resto de
matrices Hb,n 6=i 6=j correspondientes al resto de radares que componen el vector de matrices Hb
definido como (6.12) seran matrices nulas, de manera que el algoritmo estime unicamente los
sesgos correspondientes a los radares i y j contemplados en cada iteracion.
Puede comprobarse que los parametros de sesgos de altitud actualizaran sus parametros por
cada iteracion, ya que la matriz Hb,atm tomara siempre valores independientemente de los rada-
res de procedencia de las medidas.
6.4.3. Proceso Iterativo
Tras el proceso de inicializacion descrito en la Seccion 6.4.1 y la correcta composicion de
la matriz Hb en funcion de las medidas contempladas para la iteracion, los parametros de sesgo
de los vectores (6.2) y (6.3) seran estimados de manera recursiva mediante un Filtro de Kalman
Extendido.
Para llevar a cabo el proceso de prediccion, los sesgos se consideraran constantes [20] entre
instantes temporales, de manera que la matriz Φ se correspondera a la matriz identidad. Por lo
tanto, el vector de parametros (b) del nuevo instante y su respectiva matriz de covarianzas (P )
vendran definidos por,
b(k) = Φb(k − 1) (6.31)
P (k) = P (k − 1)ΦP (k − 1)′ +Q(k − 1) (6.32)
siendo k el instante temporal actual. Dado que en escenarios reales los parametros de sesgo no
van a ser constantes en su totalidad, la matriz Q debera definirse con unos valores pequenos de
covarianza.
A partir de esta prediccion, se calculara la diferencia entre el vector de residuos medido Zby el obtenido diferenciando y proyectando el vector predicho b.
Zb(k) = Zm,j − Zm,i (6.33)
r(k) = Zb(k)−Hb(k)b(k) (6.34)
Por otra parte , la matriz de covarianzas del vector de covarianzas de la diferencia r estimada

6.4. ESTIMACION RECURSIVA DE SESGOS 69
se calculara de la siguiente manera,
S(k) = Hb(k)P (k)Hb(k)T +R(k) (6.35)
siendo R la matriz de covarianzas de las medidas [18],
R = Rj(t2) + µ21Ri(t1)2 + µ2
2Ri(t3)2 (6.36)
dondeRi yRj son obtenidas mediante la matriz (6.6) utilizando los valores de medida obtenidos
por cada radar en cada instante temporal.
A partir de los valores obtenidos, se calculara la ganancia del filtro y se actualizaran los
parametros de sesgo del vector b y su respectiva matriz de covarianzas P .
K(k) = P (k)Hb(k)S(k)
(6.37)
b(k) = b(k) +K(k)r(k) (6.38)
P (k) = (I −K(k)Hb(k))P (k) (6.39)

70 CAPITULO 6. FILTRO DE ALINEAMIENTO

Capıtulo 7
Filtro de Seguimiento
Una vez aplicada la correccion de sesgos a las medidas radar recibidas, se deseara enviar
estas detecciones a la pantalla del controlador. Sin embargo, estas medidas seguiran estando
afectadas por ruido blanco aditivo de medida, que podra provocar saltos bruscos de posicion y
velocidad a lo largo de la trayectoria.
Una posible solucion a este problema es la utilizacion de los Filtros de Kalman, detallados
en el Anexo B. Estos filtros son algoritmos capaces de estimar el estado oculto de un sistema
dinamico basandose en un determinado modelo de movimiento, incluso cuando el sistema esta
sometido a ruido blanco aditivo.
Sin embargo, la trayectoria de cualquier aeronave esta formada de multiples fases de vuelo,
que distinguen tramos que pueden ser rectilıneos o con determinadas maniobras de giro. Por
tanto, el uso de un unico Filtro de Kalman podra resultar eficaz unicamente en determinadas
fases de la trayectoria, donde el modelo definido concuerde con el seguido por la aeronave.
Por lo tanto, a fin de reducir la precision y retardo de respuesta ante maniobras de las aero-
naves, se buscara implementar un algoritmo mejorado que ofrezca mejores prestaciones a los
controladores.
El filtro Interacting Multiple Model se presenta como solucion a este problema. Este algorit-
mo basa su funcionamiento en el uso de multiples filtros de Kalman funcionando en paralelo,
donde cada uno ha sido modelado para un determinado modelo de movimiento. La trayectoria
final se construira aplicando una combinacion probabilıstica a los estados predichos por cada
filtro.
71

72 CAPITULO 7. FILTRO DE SEGUIMIENTO
7.1. Seleccion de Modelos de Transicion
Por lo general, las aeronaves controladas mediante sistemas de Control de Trafico Aereo
tienen dos modos basicos de vuelo:
Movimiento uniforme y rectilıneo, que mantiene constantes la velocidad y el azimuth de
la aeronave.
Maniobras de giro o de ascenso/descenso de la aeronave.
Esta seccion introduce y describe las diferentes modalidades o tipos de movimiento escogi-
dos para el diseno del filtro IMM de este proyecto. Los modos escogidos han sido los siguientes:
Modo 1: Movimiento recto, lineal y uniforme de la aeronave.
Modo 2: Giro de derechas del avion sujeto a cambios aleatorios de la velocidad angular de
giro.
Modo 3: Giro de izquierdas del avion sujeto a cambios aleatorios de la velocidad angular
de giro.
Para ello, modelando la trayectoria mediante un sistema lineal de coordenadas cartesianas
(x, y) como las coordenadas estereograficas, el movimiento de una aeronave puede venir defi-
nida a partir de la siguiente expresion,
Xi(k) = FiXi(k − 1) +Giνi(k) (7.1)
donde Fi y Gi se corresponden a las matrices de transicion y de ganancia de ruido para cada
uno de los modelos i, respectivamente. por su parte, νi representa una secuencia de ruido blanco
que modela aceleraciones constantes para cada intervalo temporal [17].
7.1.1. Modo 1. Movimiento rectilıneo
El modelo de movimiento uniforme puede modelarse de acuerdo a pequenas variaciones
aleatorias en la aceleracion sumadas al movimiento lineal y uniforme de la aeronave. La ecua-

7.1. SELECCION DE MODELOS DE TRANSICION 73
cion de movimiento 7.1 de este modelo se particulariza mediante 7.2 para este modelo,
X1(k) =
1 0 T 0
0 0 0 T
0 0 1 0
0 0 0 1
X1(k − 1) +
T 2
20
T 0
0 T 2
2
0 T
ν1(k) (7.2)
donde X1(k) =[x y vx vy
]Trepresenta el vector de estado de las posiciones y velocida-
des de la aeronave para el instante temporal k.
Mediante el ruido de proceso ν1(k), este modelo asume que la aeronave se somete a una
aceleracion constante en cada periodo T , de manera que las aceleraciones esten incorreladas
entre periodos al ser ν1(k) una secuencia gaussiana blanca [21]. Dado que este ruido de proceso
representara la aceleracion a lo largo del periodo T , el incremento de los terminos de velocidad
(vx y vy) sera de ν1(k)T , mientras que los de posicion (x, y) sufriran una variacion de ν1(k)T2
2.
Por lo tanto, la covarianza del ruido de proceso sera de,
Q1(k) = E[G1ν1(k)ν1(k)TGT1 ] = G1σ
2ν1GT
1 =
T 4
40 T 3
20
0 T 4
40 T 3
2
T 3
20 T 2 0
0 T 3
20 T 2
σ2ν1
(7.3)
donde σ2ν1
se corresponde a la varianza de la secuencia de ruido blanco ν1. Este parametro
se escogera de manera arbitrarıa para llevar a cabo el diseno del filtro. De acuerdo a [21],
se obtendra un funcionamiento correcto del modelo utilizando un valor de σ2ν1
tiene que ser
pequeno (≈ 10−4−10−6), dado que los cambios de velocidad sufridos a lo largo de un intervalo
T deberan ser pequenos en comparacion a la velocidad actual de la aeronave.
7.1.2. Modo 2. Giro de derechas
Este modelo asume una velocidad angular w constante de giro a lo largo del intervalo tempo-
ral T . Una posibilidad para definir modelos de giro podrıa ser establecer una velocidad angular
de giro w constante y conocida para la matriz F2. Sin embargo, dado que esta velocidad de
giro no va a ser conocida de antemano, el modelo presentado en la ecuacion (7.4) asume una
velocidad de giro desconocida y que, por tanto, sera necesaria estimar [22].

74 CAPITULO 7. FILTRO DE SEGUIMIENTO
X2(k) =
1 0 sin(wT )w
−1−cos(wT )w
0
0 1 1−cos(wT )w
sin(wT )w
0
0 0 cos(wT ) − sin(wT ) 0
0 0 sin(wT ) cos(wT ) 0
0 0 0 0 1
X2(k − 1) +
T 2
20 0
0 T 2
20
T 0 0
0 T 0
0 0 T
ν2(k) (7.4)
Dado que este modelo estimara el parametro w ademas de las velocidades y posiciones, el
vector de estado del modelo vendra definido porX2(k) =[x y vx vy w
]T. Sin embargo,
sera necesario evitar que en los tramos rectilıneos el parametro w estimado se aproxime a 0, ya
que la similitud que adquirirıan este modelo y el rectilıneo podrıa provocar confusiones al filtro.
Por tanto, se debera escoger arbitrariamente un valor wmin que ejerza como lımite inferior de la
velocidad angular a fin de evitar este problema.
En este caso, el ruido de proceso ν2 se correspondera a un vector de 3 componentes indepen-
dientes de ruido blanco [22], que se representa como ν2(k) =[ν2,x ν2,y ν2,w
]T. Al igual
que para el modelo rectilıneo, las dos primeras componentes modelaran aceleraciones aleatorias
constantes para cada periodo T , y se definiran mediante una desviacion estandar de σ2ν2,l
. Por
otro lado, la tercera componente de ruido modela las aceleraciones en la velocidad angular de
giro w y se define a partir de una desviacion estandar de σ2ν2,w
. Por lo tanto, teniendo en cuenta
las ganancias de ruido definidas para este ruido de proceso, la covarianza del ruido de proceso
sera de,
Q2(k) = E[G2ν2(k)ν2(k)TGT2 ] = G2Σν2G
T2 = G2
σ2ν2,l
0 0
0 σ2ν2,l
0
0 0 σ2ν2,w
GT2 (7.5)
donde Σν2 se corresponde a la matriz de covarianzas del ruido de proceso ν2.
La desviacion estandar de la velocidad de giro (σν2,w) se escogera a partir del procedimiento
presentado en [21]. En primer lugar, sera conveniente establecer un valor de σν2,w alto (≈ 0.1)
a fin de agilizar la deteccion y transicion al modelo de giro cuando la aeronave entre tome una
curva. Sin embargo, una vez que la aeronave haya entrado a la curva, sera mas conveniente uti-
lizar un ruido de proceso pequeno a fin de mantener el modelo a lo largo de la misma. Por tanto,
una vez llevada a cabo la transicion de modelo y el avion se encuentre girando, la desviacion
estandar σν2,w pasara a definirse a partir de,
1
2Ω ≤ σν2,w ≤ Ω (7.6)

7.2. DISENO DEL FILTRO 75
donde,
Ω =w
Tbank(7.7)
siendo Tbank el tiempo que la aeronave tarda en ladearse para entrar a una curva. El tiempo pro-
medio que toma un avion comercial en ladearse puede considerarse de entorno a los 5 segundos
[21].
7.1.3. Modo 3. Giro de izquierdas
El modelo contemplado para los giros de izquierdas sigue un procedimiento analogo al pre-
sentado para los giros de derechas en la seccion anterior. La unica diferencia de este movimiento
con respecto al modelo de la ecuacion (7.4) se dara en la matriz de transicion F3, donde los sig-
nos correspondientes a los terminos de velocidad en x e y deberan ser intercambiados a fin de
alterar el sentido de la curva. Por tanto, la ecuacion o modelo de movimiento para los giros de
izquierdas de la aeronave vendran definidos a partir de 7.8.
X3(k) =
1 0 sin(wT )w
1−cos(wT )w
0
0 1 −1−cos(wT )w
sin(wT )w
0
0 0 cos(wT ) sin(wT ) 0
0 0 − sin(wT ) cos(wT ) 0
0 0 0 0 1
X3(k − 1) +
T 2
20 0
0 T 2
20
T 0 0
0 T 0
0 0 T
ν3(k) (7.8)
La matrizQ3(k) se obtiene particularizando la expresion dada en 7.5 para el ruido de proceso
ν3(k), cuya varianza sera de σ2ν3
.
7.2. Diseno del Filtro
Esta seccion describe el diseno completo del filtro Interacting Multiple Model implementado
para este proyecto, que toma como base el proceso de implementacion presentado en [22]. Para
ello, se detallara cada una de las 4 etapas diferenciadas de las que consta una iteracion del
algoritmo.
Por cada instante temporal en el que se reciba una medida de una determinada aeronave, se
llevara a cabo una iteracion del algoritmo IMM a fin de actualizar el estado y posicion de la
aeronave en cuestion. Para ello, sera necesario introducir los siguientes parametros de entrada,
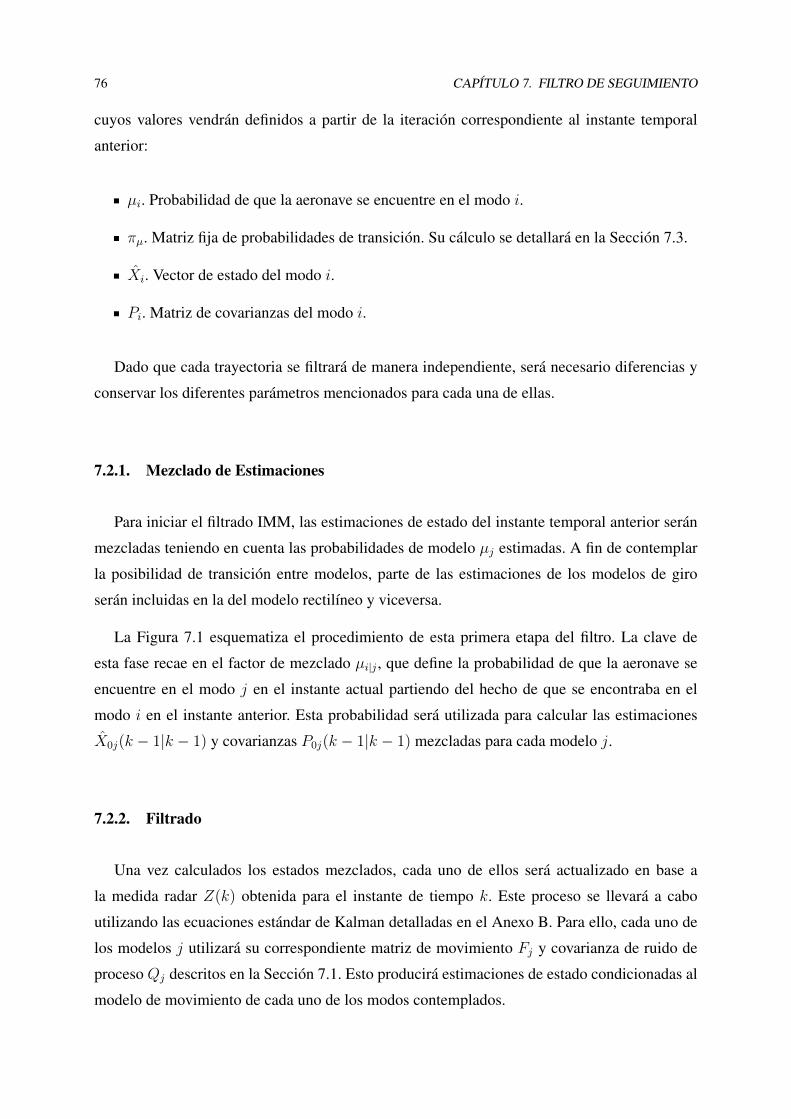
76 CAPITULO 7. FILTRO DE SEGUIMIENTO
cuyos valores vendran definidos a partir de la iteracion correspondiente al instante temporal
anterior:
µi. Probabilidad de que la aeronave se encuentre en el modo i.
πµ. Matriz fija de probabilidades de transicion. Su calculo se detallara en la Seccion 7.3.
Xi. Vector de estado del modo i.
Pi. Matriz de covarianzas del modo i.
Dado que cada trayectoria se filtrara de manera independiente, sera necesario diferencias y
conservar los diferentes parametros mencionados para cada una de ellas.
7.2.1. Mezclado de Estimaciones
Para iniciar el filtrado IMM, las estimaciones de estado del instante temporal anterior seran
mezcladas teniendo en cuenta las probabilidades de modelo µj estimadas. A fin de contemplar
la posibilidad de transicion entre modelos, parte de las estimaciones de los modelos de giro
seran incluidas en la del modelo rectilıneo y viceversa.
La Figura 7.1 esquematiza el procedimiento de esta primera etapa del filtro. La clave de
esta fase recae en el factor de mezclado µi|j , que define la probabilidad de que la aeronave se
encuentre en el modo j en el instante actual partiendo del hecho de que se encontraba en el
modo i en el instante anterior. Esta probabilidad sera utilizada para calcular las estimaciones
X0j(k − 1|k − 1) y covarianzas P0j(k − 1|k − 1) mezcladas para cada modelo j.
7.2.2. Filtrado
Una vez calculados los estados mezclados, cada uno de ellos sera actualizado en base a
la medida radar Z(k) obtenida para el instante de tiempo k. Este proceso se llevara a cabo
utilizando las ecuaciones estandar de Kalman detalladas en el Anexo B. Para ello, cada uno de
los modelos j utilizara su correspondiente matriz de movimiento Fj y covarianza de ruido de
proceso Qj descritos en la Seccion 7.1. Esto producira estimaciones de estado condicionadas al
modelo de movimiento de cada uno de los modos contemplados.

7.2. DISENO DEL FILTRO 77
Figura 7.1: Diagrama de mezclado de estimaciones.

78 CAPITULO 7. FILTRO DE SEGUIMIENTO
Figura 7.2: Diagrama de filtrado.
7.2.3. Actualizacion de Probabilidades
Tras actualizar cada modelo en base a la medida radar recibida, las probabilidades de mode-
lo µj se recalcularan a partir de la funcion de verosimilitud Λj y las probabilidades de modelo

7.2. DISENO DEL FILTRO 79
estimadas en la etapa de Mezclado de Estimaciones. A partir de la magnitud de los residuos de
medida νj(k) y de covarianza Sj(k) calculados en la etapa de Filtrado, la funcion de verosi-
militud tomara valores mayores o menores que haran que las probabilidades µj incrementen o
reduzcan su valor, ajustandose ası a la expectativa de seguimiento obtenida para cada uno de los
modelos.
Figura 7.3: Diagrama de actualizacion de probabilidad.
7.2.4. Combinacion de Estimaciones de Estado
Finalmente, se deseara obtener una medida definitiva X(k|k) que sera enviada a la pantalla
del controlador aereo, dado que hasta el momento se dispondra unicamente de los 3 diferentes
estados estimados para cada uno de los modelos. Para ello, se construira una medida combinada
a partir de los estados y de las probabilidades µj actualizadas obtenidas para cada modelo. A su
vez, se calculara tambien la matriz de covarianzas combinada para este estado final. El proceso
y las ecuaciones de esta etapa se ilustran en la Figura 7.4.

80 CAPITULO 7. FILTRO DE SEGUIMIENTO
Figura 7.4: Diagrama de combinacion de estimaciones de estado.
7.3. Transicion de Modelos
Modelando el sistema como una secuencia de Markov la probabilidad de transicion del modo
1 al modo 2 se define como,
Pm2(k)|m1(k − 1) = π12 (7.9)
donde π12 es una probabilidad fija.
Sin embargo, cabe destacar que para poder modelar el sistema como un proceso de Markov,
los intervalos temporales entre medidas deberan de ser constantes. Dado que en entornos de
procesado multirradar este intervalo no sera constante, sera necesario modificar la secuancia de
Markov de manera que las probabilidades de transicion sean dependientes del intervalo T entre
las dos ultimas actualizaciones de posicion o medidas recibidas [22].
Como se ha descrito en la Seccion 7.1, el filtro implementado estara compuesto de 3 mode-
los. Por tanto, siendo µi(T0) la probabilidad de que la aeronave se encuentre en el modo i en el
instante T0, las probabilidades en el instante T0 + T se corresponden a,µ1(T0 + T )
µ2(T0 + T )
µ3(T0 + T )
= π(T )
µ1(T0)
µ2(T0)
µ3(T0)
(7.10)

7.3. TRANSICION DE MODELOS 81
donde π(T ) es una matriz 3x3 que contiene las probabilidades de transicion πij(T ).
La matriz π(T ) queda definida a partir de la ecuacion 7.11 descrita en [23], donde rij repre-
senta el ratio de transicion instantaneo del modo i al modo j.
π(T ) =
−r12 − r13 r21 r31
r12 −r21 − r23 r32
r13 r23 −r31 − r32
π(T ) (7.11)
De acuerdo con [22], en los casos en los que sea razonable asumir que los intervalos tempo-
rales entre medidas de una misma trayectoria son T < 10s, la ecuacion 7.11 puede aproximarse
como 7.12.
π(T ) =
1− r12T − r13T r21T r31T
r12T 1− r21T − r23T r32T
r13T r23T 1− r31T − r32T
π(T ) (7.12)
Para aplicaciones de Control de Trafico Aereo, se ha verificado que los valores
r12 = r13 = (48s)−1
r21 = r31 = (600s)−1
r23 = r32 = (1200s)−1
proveen un buen rendimiento para aeronaves con modalidad de vuelo de tipo comercial [22].

82 CAPITULO 7. FILTRO DE SEGUIMIENTO

Capıtulo 8
Interfaz de Trabajo
Para llevar a cabo la implementacion de las diferentes etapas funcionales descritas en el
Capıtulo 5, se ha desarrollado una interfaz grafica en MATLAB que actuara como herramienta
de trabajo. Sobre esta, se podran describir diferentes escenarios aereos y simularlos a fin de
obtener las detecciones radar que se recibiran en el centro de procesado de datos. De la misma
manera, el programa permitira estimar y corregir las medidas sesgadas utilizando el Filtro de
Alineamiento detallado en el Capıtulo 6 para, posteriormente, llevar a cabo correctamente el
seguimiento de cada trayectoria mediante el filtro del Capıtulo 7.
A lo largo de este capıtulo, se describiran tanto la estructura como las diferentes funcionali-
dades del simulador.
8.1. Definicion del escenario
Para poder llevar a cabo las simulaciones deseadas, sera necesario definir de una manera
inteligente y adecuada el escenario aereo que a contemplar. Para ello, el proceso de definicion
de parametros que presente la interfaz ha de ser, simple e intuitivo.
8.1.1. Creacion o carga del escenario
Una vez arrancado el programa, se debera escoger el escenario a simular. Para ello, se podra
elegir entre definir un nuevo escenario o, simplemente, recargar un determinado escenario ya
definido que haya sido guardado anteriormente. De la misma manera, la interfaz sera capaz de
83

84 CAPITULO 8. INTERFAZ DE TRABAJO
cargar y procesar archivos de texto plano que contengan datos de radares y medidas reales re-
cibidas en un determinado centro de procesado de datos, tal y como se detallara posteriormente
en la Seccion 8.4.
La Figura 8.1 muestra la ventana de definicion de parametros obtenida en caso de que la
eleccion sea la de definir un nuevo escenario.
Figura 8.1: Parametros de definicion de un nuevo escenario.
Como ya se ha mencionado en capıtulos anteriores, en este proyecto se considerara que todas
las aeronaves se encuentran a la misma temperatura y que la diferencia de presion medida a
nivel del mar sera constante para todo el espacio aereo contemplado. Por tanto, estos datos seran
introducidos como parametros genericos del propio escenario. Por otra parte, se requerira definir
el punto de proyeccion escogido para llevar a cabo las posteriores proyecciones estereograficas
necesarias.
Tras finalizar el proceso de creacion o recarga del archivo del escenario, se visualizara una
nueva opcion en la pestana Archivo con nombre Guardar Escenario, que podra ser utilizada
para guardar o sobrescribir archivos que puedan ser recargados en otro momento ne la interfaz.

8.1. DEFINICION DEL ESCENARIO 85
8.1.2. Descripcion de Radares y Trayectorias
Una vez se haya escogido el tipo de escenario deseado, la interfaz habilitara (entre otras)
las pestanas Radares y Trayectorias, a traves de las cuales se podra proceder a la definicion los
parametros descriptivos de los radares y las trayectorias que se quieran tener en cuenta en el
marco de simulacion.
Por otra parte, una vez finalizado este proceso de definicion o si se opta por cargar un esce-
nario predefinido, la interfaz permitira modificar parametros y eliminar radares o trayectorias
que finalmente no se deseen contemplar en las simulaciones posteriores.
Figura 8.2: Menu de seleccion de trayectoria a modificar.
8.1.2.1. Parametros de Radares
Si se opta por incorporar un nuevo radar al escenario seleccionando la opcion Nuevo Ra-
dar de la pestana Radares, se requerira la introduccion de los parametros radar en una serie
de 3 ventanas que iran apareciendo de manera secuencial a medida que se vayan rellenando
los parametros requeridos. La Figura 8.3 muestra, de izquierda a derecha, esta secuencia de
dialogos de definicion de parametros que se iran mostraran al usuario,
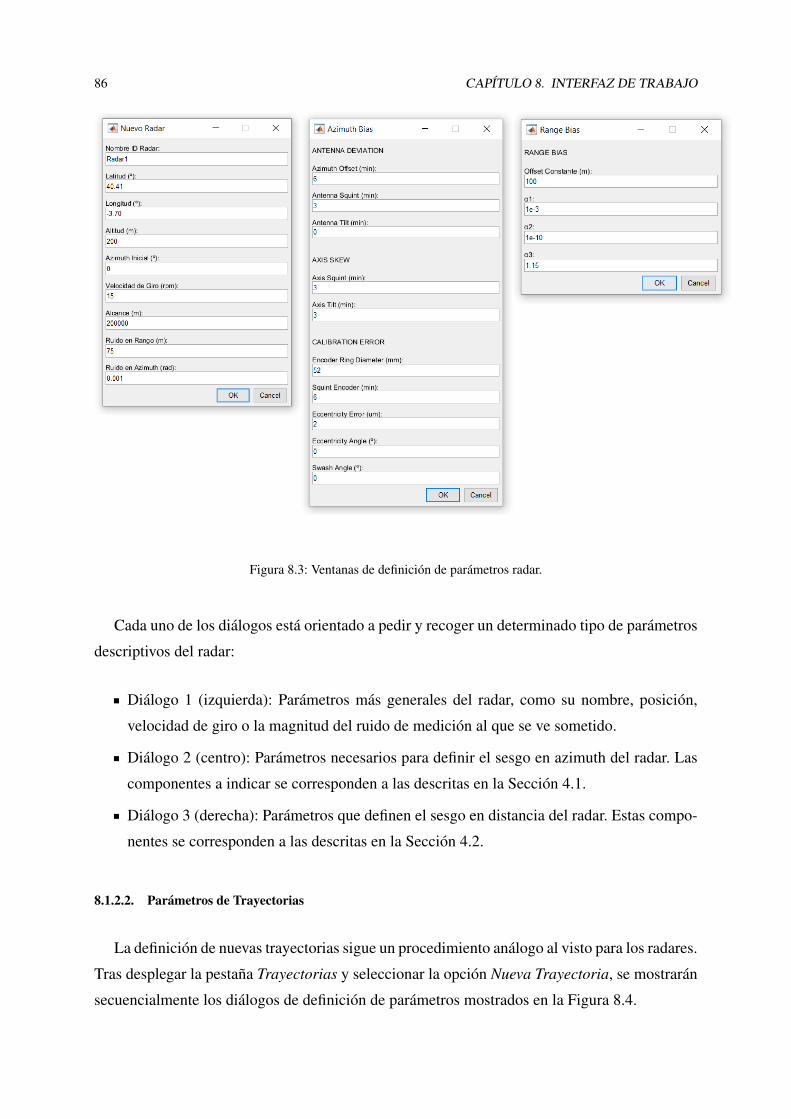
86 CAPITULO 8. INTERFAZ DE TRABAJO
Figura 8.3: Ventanas de definicion de parametros radar.
Cada uno de los dialogos esta orientado a pedir y recoger un determinado tipo de parametros
descriptivos del radar:
Dialogo 1 (izquierda): Parametros mas generales del radar, como su nombre, posicion,
velocidad de giro o la magnitud del ruido de medicion al que se ve sometido.
Dialogo 2 (centro): Parametros necesarios para definir el sesgo en azimuth del radar. Las
componentes a indicar se corresponden a las descritas en la Seccion 4.1.
Dialogo 3 (derecha): Parametros que definen el sesgo en distancia del radar. Estas compo-
nentes se corresponden a las descritas en la Seccion 4.2.
8.1.2.2. Parametros de Trayectorias
La definicion de nuevas trayectorias sigue un procedimiento analogo al visto para los radares.
Tras desplegar la pestana Trayectorias y seleccionar la opcion Nueva Trayectoria, se mostraran
secuencialmente los dialogos de definicion de parametros mostrados en la Figura 8.4.

8.2. VISUALIZACION DEL ESCENARIO 87
Figura 8.4: Ventanas de definicion de trayectorias.
Dialogo de Parametros Iniciales: Recoge los parametros relativos a la posicion y estado
(velocidad y azimuth) iniciales de la aeronave que recorrera la trayectoria a describir.
Dialogo de Definicion de Tramos: Define los vectores de duracion y las aceleraciones de
cada tramo de la trayectoria de la aeronave descritos en la Seccion 5.1. La longitud de
los vectores de los 4 campos a definir en la interfaz debera ser la misma para un correcto
funcionamiento del programa.
8.2. Visualizacion del Escenario
Una vez finalizado el proceso de descripcion del entorno de simulacion mediante la defini-
cion de los radares y las trayectorias a contemplar, el escenario ideal planteado podra ser vi-
sualizado en la pantalla del simulador seleccionando la opcion Dibujar Escenario de la pestana
Simulacion. En base a los datos introducidos, la interfaz procesara las trayectorias en cuestion
y las dibujara sobre el plano estereografico cuyo punto de tangencial haya sido definido ante-
riormente. Se hara lo propio tambien con las posiciones de los radares contemplados. La Figura
8.5 muestra un caso simple en el cual se contemplan unicamente un radar, representado por una
X , y una trayectoria. Los cırculos de color rojo y verde representaran los puntos de partida y de
llegada de la aeronave, respectivamente.

88 CAPITULO 8. INTERFAZ DE TRABAJO
Figura 8.5: Visualizacion de escenario.
Sin embargo, para poder llevar a cabo correctamente la posterior estimacion de sesgos y
obtener los resultados deseados, sera necesario definir escenarios con una mayor abundancia
de trayectorias y de radares que el ilustrado en la Figura 8.5. Realizar este proceso de defini-
cion utilizando unicamente los dialogos mostrados en las Figuras 8.3 y 8.4 puede resultar un
tanto tedioso y extenso. Por lo tanto, se ha desarrollado un metodo de definicion del escenario
sobre la propia pantalla de visualizacion para agilizar este proceso. Este metodo se describe a
continuacion en la Seccion 8.2.1.
8.2.1. Dibujar Escenario
Tras seleccionar la opcion Dibujar Escenario de la pestana Simulacion, se mostrara el dialo-
go de la Figura 8.6, que pregunta al usuario si desea anadir nuevas trayectorias al escenario. Si
la respuesta es afirmativa, se pedira introducir el numero de trayectorias a anadir mediante un
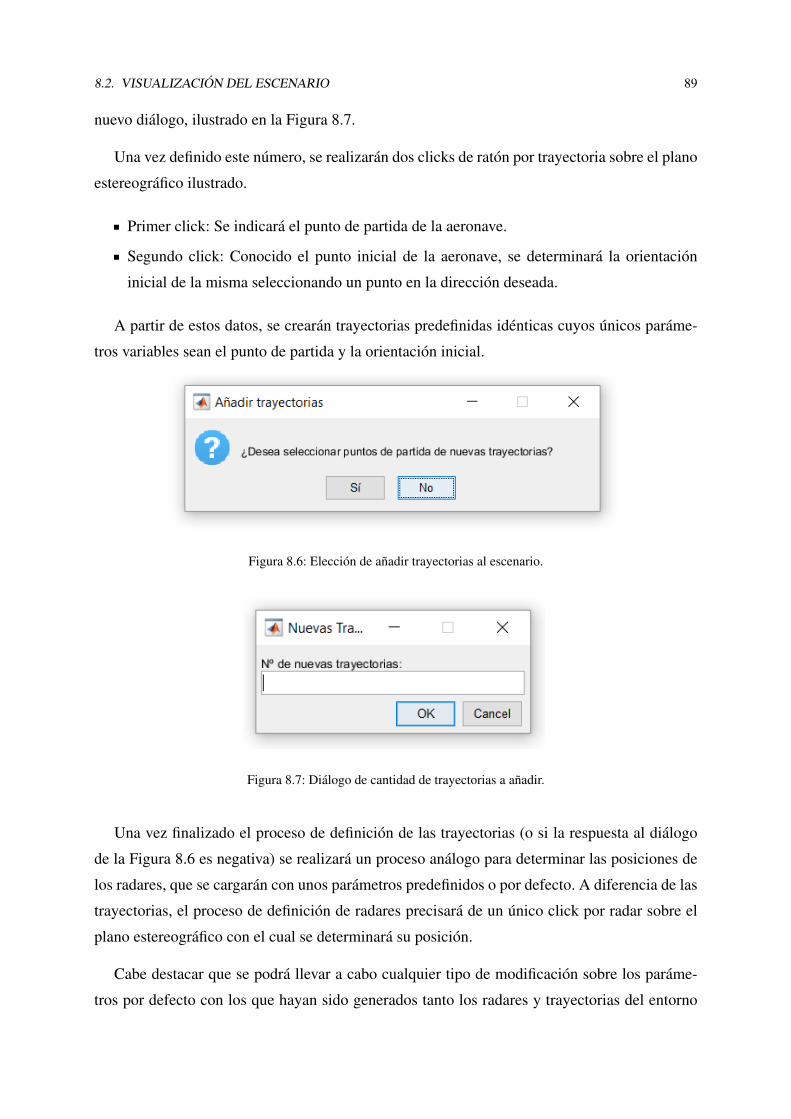
8.2. VISUALIZACION DEL ESCENARIO 89
nuevo dialogo, ilustrado en la Figura 8.7.
Una vez definido este numero, se realizaran dos clicks de raton por trayectoria sobre el plano
estereografico ilustrado.
Primer click: Se indicara el punto de partida de la aeronave.
Segundo click: Conocido el punto inicial de la aeronave, se determinara la orientacion
inicial de la misma seleccionando un punto en la direccion deseada.
A partir de estos datos, se crearan trayectorias predefinidas identicas cuyos unicos parame-
tros variables sean el punto de partida y la orientacion inicial.
Figura 8.6: Eleccion de anadir trayectorias al escenario.
Figura 8.7: Dialogo de cantidad de trayectorias a anadir.
Una vez finalizado el proceso de definicion de las trayectorias (o si la respuesta al dialogo
de la Figura 8.6 es negativa) se realizara un proceso analogo para determinar las posiciones de
los radares, que se cargaran con unos parametros predefinidos o por defecto. A diferencia de las
trayectorias, el proceso de definicion de radares precisara de un unico click por radar sobre el
plano estereografico con el cual se determinara su posicion.
Cabe destacar que se podra llevar a cabo cualquier tipo de modificacion sobre los parame-
tros por defecto con los que hayan sido generados tanto los radares y trayectorias del entorno

90 CAPITULO 8. INTERFAZ DE TRABAJO
utilizando, respectivamente, las opciones Modificar Radar y Modificar Trayectoria.
8.3. Simulacion y Filtrado de Datos
Tras completar la descripcion del entorno y corroborarlo mediante visualizacion del mis-
mo, se podra proceder a la etapa de simulacion. Para ello, la pestana Simulacion ofrecera dos
opciones adicionales a la de Dibujar Escenario ya vista anteriormente:
Generacion de Medidas Radar: Esta opcion permitira al usuario obtener las medidas de
distancia, azimuth y altitud de cada una de las trayectorias existentes detectadas por cada
radar, siguiendo el procedimiento presentado en la Seccion 5.1. Estas detecciones presen-
taran una distorsion con respcto a su valor ideal en funcion de las especificaciones de sesgo
y ruido de medida definidas para cada radar.
Filtrado de Medidas: Una vez finalizada la etapa de generacion, esta opcion permitira al
usuario proceder a la fase de procesado de medidas. Para ello, siguiendo el la descripcion
funcional presentada en la Seccion 5.2, el programa estimara y corregira los sesgos de las
medidas radar recibidas utilizando el Filtro de Alineamiento detallado en el Capıtulo 6.
Tras corregir el sesgo de las medidas, se utilizaran para llevar a cabo el seguimiento de la
trayectoria utilizando el Filtro IMM descrito en el Capıtulo 7.
Figura 8.8: Seleccion de tipos de trayectorias a visualizar.
Finalizado el proceso de procesado y filtrado de las detecciones radar, los resultados obte-
nidos podran visualizarse mediante la opcion Plot Resultados de la pestana Plot. Esta opcion

8.4. DATOS REALES 91
permitira al usuario seleccionar los tipos de trayectorias que desee visualizar a fin de facilitar la
comparativa deseada, tal y como se muestra en la Figura 8.8.
8.4. Datos Reales
La interfaz permitira a su vez trabajar con datos reales, cargados a partir de ficheros de texto
plano. Para ello, se debera seleccionar la opcion Cargar Datos Reales de la pestana Archivo,
apreciable en la Figura 8.1, y seleccionar los respectivos archivos que contengan los parametros
de los radares utilizados y medidas reales detectadas. Una vez procesados estos archivos, el
proceso de visualizacion y filtrado seran analogos al descrito para el caso de datos generados.
Cabe destacar que en esta situacion no se dispondra de las trayectorias idealmente seguidas
por las aeronaves detectadas, dado que el archivo de medidas contendra unicamente las medidas
radar.

92 CAPITULO 8. INTERFAZ DE TRABAJO

Capıtulo 9
Pruebas del Sistema
A medida que se vayan implementando las diferentes funcionalidades del sistema sera nece-
sario llevar a cabo una serie de pruebas que certifiquen el correcto funcionamiento del mismo,
de manera que, una vez finalizada la implementacion del sistema, se pueda proceder con cer-
teza a mostrar los resultados finales obtenidos. Por ello, este capıtulo ilustrara y detallara tanto
las diferentes pruebas y analisis realizados para llevar a cabo el la evaluacion del sistema de
correccion de sesgos y fusion de datos implementado.
En primer lugar, la Seccion 9.1 detallara el proceso de evaluacion del filtro de alineamiento.
Para ello, se utilizaran datos de tipo simulados cuyos parametros de sesgo a estimar se seleccio-
naran de manera arbitraria, lo cual facilitara la comprobacion de su correcto funcionamiento.
De la misma manera, sera necesario evaluar el funcionamiento del filtro de seguimiento
implementado. Con este objetivo, la Seccion 9.2 analizara el comportamiento del filtro ante las
medidas de una determinada trayectoria conocida.
Finalmente, una vez comprobado el correcto funcionamiento de los filtros de alineamiento y
seguimiento implementados, la Seccion 9.3 procedera a mostrar los resultados obtenidos para
simulaciones del sistema en su totalidad. Se comenzara analizando el sistema bajo la utiliza-
cion de datos de tipo generados y por ultimo, se mostraran los resultados obtenidos cuando las
medidas a analizar sean procedentes de radares reales.
93
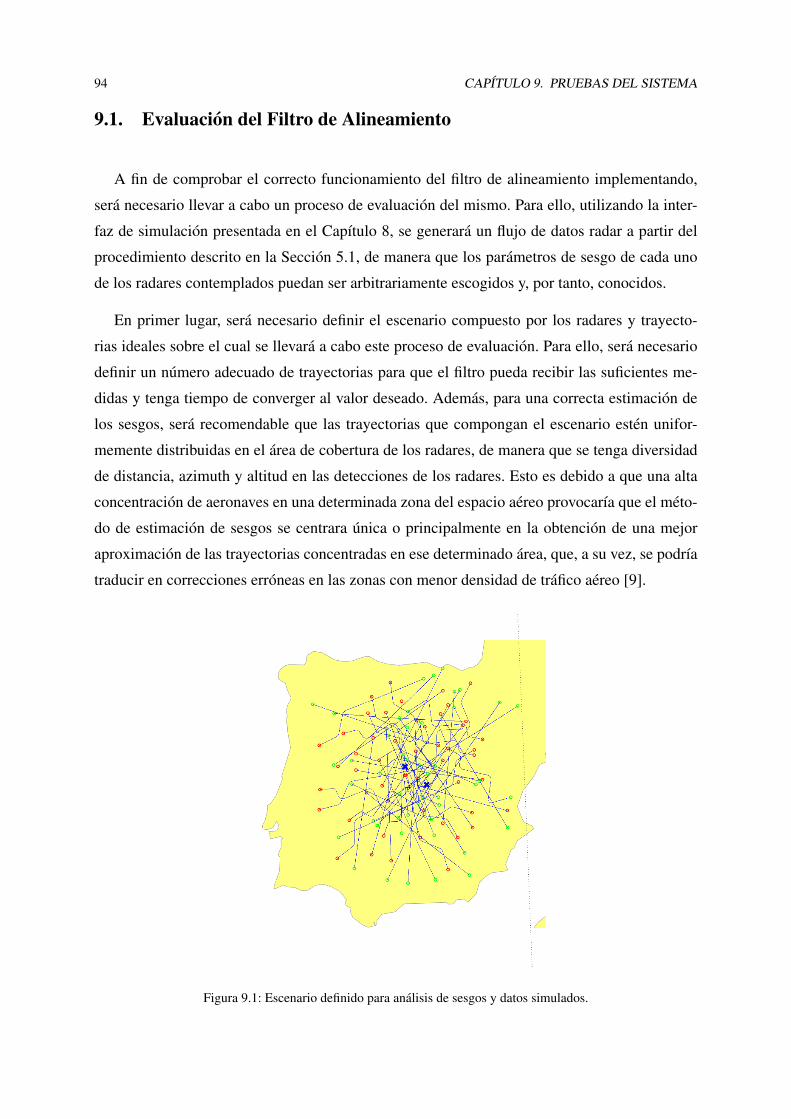
94 CAPITULO 9. PRUEBAS DEL SISTEMA
9.1. Evaluacion del Filtro de Alineamiento
A fin de comprobar el correcto funcionamiento del filtro de alineamiento implementando,
sera necesario llevar a cabo un proceso de evaluacion del mismo. Para ello, utilizando la inter-
faz de simulacion presentada en el Capıtulo 8, se generara un flujo de datos radar a partir del
procedimiento descrito en la Seccion 5.1, de manera que los parametros de sesgo de cada uno
de los radares contemplados puedan ser arbitrariamente escogidos y, por tanto, conocidos.
En primer lugar, sera necesario definir el escenario compuesto por los radares y trayecto-
rias ideales sobre el cual se llevara a cabo este proceso de evaluacion. Para ello, sera necesario
definir un numero adecuado de trayectorias para que el filtro pueda recibir las suficientes me-
didas y tenga tiempo de converger al valor deseado. Ademas, para una correcta estimacion de
los sesgos, sera recomendable que las trayectorias que compongan el escenario esten unifor-
memente distribuidas en el area de cobertura de los radares, de manera que se tenga diversidad
de distancia, azimuth y altitud en las detecciones de los radares. Esto es debido a que una alta
concentracion de aeronaves en una determinada zona del espacio aereo provocarıa que el meto-
do de estimacion de sesgos se centrara unica o principalmente en la obtencion de una mejor
aproximacion de las trayectorias concentradas en ese determinado area, que, a su vez, se podrıa
traducir en correcciones erroneas en las zonas con menor densidad de trafico aereo [9].
Figura 9.1: Escenario definido para analisis de sesgos y datos simulados.

9.1. EVALUACION DEL FILTRO DE ALINEAMIENTO 95
Los resultados presentados en esta seccion se obtendran a partir del escenario mostrado en
la Figura 9.1, que estara compuesto por 50 trayectorias y 2 radares cuyos parametros de defini-
cion se detallan en la Tabla 9.1. Cabe destacar que ademas de la definicion de los parametros
que modelaran los sesgos de las medidas de los radares, sera necesario detallar las desviacio-
nes tıpicas del ruido blanco de las medidas de distancia y azimuth. Este ruido representara las
imprecisiones de medida aleatorias adicionales a los sesgos de las que padecen los radares,
de manera que pueda comprobarse que el algoritmo implementado se comporta correctamente
incluso bajo estas circunstancias.
Por su parte, las trayectorias definidas tendran una duracion total de 2000 segundos y volaran
a altitudes diferentes y a una velocidad constante de 200 m/s a lo largo de las mismas. El es-
cenario combinara trayectos completamente rectilıneos con trayectorias que alternen intervalos
rectilıneos con tramos de giro.
Parametro Radar 1 Radar 2 Unidades
Latitud 40.5722 40.0695 º
Longitud −4.3853 −3.5912 º
Alcance 500 500 km
vgiro 15 15 RPM
σρ 50 50 m
σθ 0.0859 0.0859 º
Parametros de Sesgo
∆ρ0 100 150 m
α1 1 · 10−3 1.5 · 10−3 m/m
α2 1 · 10−9 1 · 10−9 m/m2
α3 1.15 1.15 -
∆θ0 0.5 0.3 º
sant 0.1 0.1 º
taxis 0.2 0.1 º
saxis 0.2 0.1 º
∆R 4 3 µm
Rencoder 26 26 mm
αecc 0 0 º
senc 0.1 0.1 º
αenc 0 0 º
∆H 245.42 m
∆T 5 º
Tabla 9.1: Parametros de definicion los radares del escenario definido.

96 CAPITULO 9. PRUEBAS DEL SISTEMA
Tras inicializar tanto los valores de los parametros a estimar ası como la matriz de covarian-
zas del filtro de la manera descrita en la Seccion 6.4.1, se comenzara el proceso de estimacion
de los parametros de manera recursiva.
Finalizado este procedimiento, las Figuras 9.2-9.8 muestran los resultados obtenidos para
cada uno de los parametros de sesgos de los dos radares. El valor estimado para de cada uno
de los parametros estara representado mediante la linea azul, mientras que las lineas rojas re-
presentaran el intervalo de confianza del 95 %, definido por los valores de x ± 2σ, donde x
es el valor del parametros estimado y σ la desviacion estandar del parametro en cuestion [24]
estimada por el propio filtro de alineamiento mediante la matriz de covarianzas P . Por ultimo,
la linea de color negro se correspondera al valor objetivo o ideal de cada uno de los parametros
de sesgo con los que se han generado los datos utilizados, de manera facilite la visualizacion de
si la estimacion de cada parametro es correcta o no.
Como puede comprobarse, la estimacion de los parametros es satisfactoria incluso aunque
las medidas de los radares esten sometidas a ruido blanco, dado que convergen a valores muy
proximos a su valor ideal. Ademas, puede verse que estas estimaciones estan contenidas practi-
camente en su totalidad en el intervalo de confianza del 95 % establecido.
Sin embargo, es apreciable que el parametro α3 no converge al valor establecido en ninguno
de los dos radares. Tras llevar a cabo una serie de pruebas, ha podido comprobarse que este he-
cho se debe a imperfecciones propias de la proyeccion estereografica al proyectar las posiciones
del elipsoide terrestre, ya que se ha probado que el algoritmo estima el valor ideal del parame-
tro α3 correctamente asumiendo un modelo de Tierra plana. Sin embargo, como se comprobara
posteriormente en la Seccion 9.3.1, la correccion de sesgos seguira siendo valida, ya que este
efecto sera compensado por pequenas desviaciones de otros parametros con respecto a su valor
ideal.

9.1. EVALUACION DEL FILTRO DE ALINEAMIENTO 97
Figura 9.2: Parametros de Sesgo en Distancia del Radar 1 (∆ρ0, α1, α2, α3).
Figura 9.3: Parametros de Sesgo en Azimuth del Radar 1 (θ0, sant, taxis, saxis).
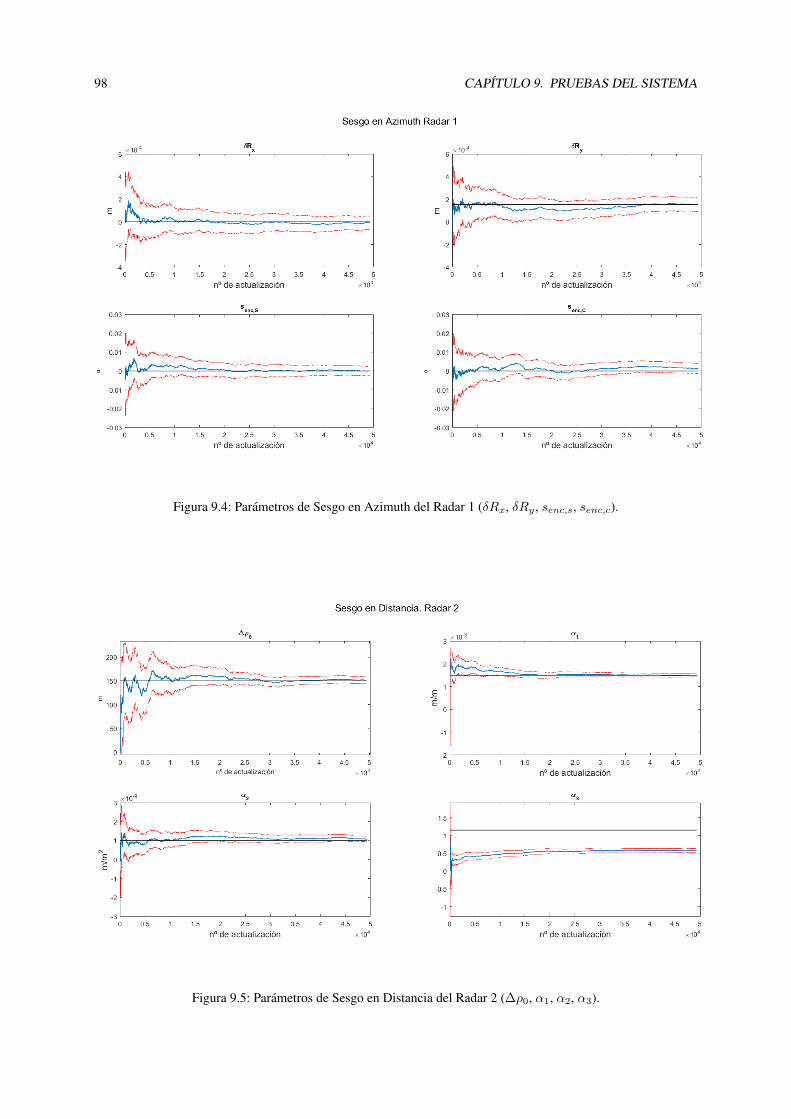
98 CAPITULO 9. PRUEBAS DEL SISTEMA
Figura 9.4: Parametros de Sesgo en Azimuth del Radar 1 (δRx, δRy , senc,s, senc,c).
Figura 9.5: Parametros de Sesgo en Distancia del Radar 2 (∆ρ0, α1, α2, α3).

9.1. EVALUACION DEL FILTRO DE ALINEAMIENTO 99
Figura 9.6: Parametros de Sesgo en Azimuth del Radar 2 (θ0, sant, taxis, saxis)
Figura 9.7: Parametros de Sesgo en Azimuth del Radar 2 (δRx, δRy , senc,s, senc,c)

100 CAPITULO 9. PRUEBAS DEL SISTEMA
Figura 9.8: Parametros de Sesgo en Altitud
9.2. Evaluacion del Filtro de Seguimiento
Tal y como se ha descrito en el Capıtulo 7, el seguimiento de las trayectorias se realizara
mediante un filtro IMM de 3 modelos. Por ello, una vez implementado, sera necesario llevar a
cabo un proceso de evaluacion del comportamiento de este filtro, de manera que sus parame-
tros puedan ajustarse para obtener un mejora en el funcionamiento del algoritmo. Esta seccion
describira proceso de evaluacion del filtro de seguimiento implementado.
En primer lugar sera necesario definir la trayectoria ideal a utilizar para llevar a cabo la
evaluacion del filtro, ilustrada en la Figura 9.9. La aeronave mantendra una velocidad constante
de 200 m/s a lo largo de la trayectoria, compuesta por los siguientes tramos:
Tres tramos rectilıneos de duracion de 300 segundos.
Un tramo de giro de derechas de aceleracion tangencial de 3 m/s2 y duracion de 150
segundos
Un tramo de giro de izquierdas de aceleracion tangencial de 4 m/s2 y duracion de 150
segundos.

9.2. EVALUACION DEL FILTRO DE SEGUIMIENTO 101
Figura 9.9: Escenario de evaluacion del filtro de seguimiento IMM.
Dado que este filtro recibirıa, en un caso ideal, las medidas corregidas en sesgo, se utilizaran
dos radares insesgados para tomar las medidas de la aeronave que sigue la trayectoria descrita.
Sin embargo, estas detecciones sı estaran afectadas por ruido o imprecisiones de medida. Los
parametros de precision de medida en distancia y azimuth definidos para ambos radares han sido
de σρ = 100 metros y σθ = 0.143 grados, respectivamente. La velocidad de giro seleccionadas
para ambos radares sera de 15 RPM.
La visualizacion y evaluacion de los resultados obtenidos permitira llevar a cabo un ajuste
de los parametros del filtro, de manera que se adapte correctamente tanto a tramos rectilıneos
como a tramos de maniobra y se minimicen los tiempos de transicion de un modo a otro. Para
ello, sera interesante ajustar los valores de las desviaciones tıpicas de los ruidos de proceso de
cada modo i (σνi). Siguiendo el razonamiento presentado en la Seccion 7.1, tras un proceso de
pruebas y ajuste se ha comprobado que el sistema funciona de manera adecuada utilizando los
siguientes valores:
Modo 1: Se utiliza σν1 = 10−6 considerando ası que las distintas aceleraciones a las que
se somete la aeronave en los diferentes periodos T son bajas.
Modos 2 y 3: Se utiliza σνi,w = 0.1 a fin de agilizar la deteccion de la curva y la expresion

102 CAPITULO 9. PRUEBAS DEL SISTEMA
(7.6) cuando pueda considerarse que la aeronave haya entrado a la curva (µi > 0.5).
Por otro lado, la modificacion de los valores de rij aumentara o disminuira las probabilidades
de transicion entre de un modo a otro entre medidas. Para las pruebas realizadas, se han utilizado
los valores recomendados por [22], ya detallados en la Seccion 7.3.
La evaluacion del filtro se llevara a cabo analizando los valores de la Raız del Error Cuadrati-
co Medio (RMSE) de la posicion, velocidad y rumbo de la aeronave a lo largo de la trayectoria.
Los resultados presentados en esta seccion se obtendran en base a N = 200 iteraciones de
Monte Carlo. Por tanto, el valor de RMSE se definira a partir de la ecuacion (9.1) [17],
RMSE =
√√√√ 1
N
N∑i=1
[xi(k)− xi(k)]2 (9.1)
donde,
xi(k) representa el valor ideal conocido del parametro en cuestion en el instante temporal
k e iteracion i.
xi(k) representa la estimacion del parametro en cuestion obtenido a partir de la salida del
filtro IMM para el instante temporal k e iteracion i.
Para el caso particular de la posicion, se distinguiran los errores cometidos con respecto
al eje longitudinal y al transversal de la trayectoria. La obtencion de estas componentes, para
cualquier instante temporal k, se llevara a cabo a partir de los valores conocidos de la posicion
en los ejes X e Y del plano estereografico y el rumbo ideal (θ) de la aeronave, siguiendo la
expresion (9.2). [xlongitudinal(k)
xtransversal(k)
]=
[cos(θ(k)) sin(θ(k))
−sin(θ(k)) cos(θ(k))
][X(k)
Y (k)
](9.2)
Por su parte, la estimacion de la velocidad de la aeronave se realizara de manera directa a
partir del modulo de las componentes de velocidad en los ejes X e Y estimados por el IMM.
Por ultimo, la estimacion del rumbo de la aeronave en un determinado instante temporal k
podra determinarse a partir de las componentes en X e Y de los vectores de velocidad estimados
por el filtro IMM,
θ(k) = arctan(vu,x(k)
vu,y(k)) (9.3)
siendo,
vu,x(k) =vx(k)
|v(k)|(9.4)

9.2. EVALUACION DEL FILTRO DE SEGUIMIENTO 103
vu,y(k) =vy(k)
|v(k)|(9.5)
La Figura 9.10 muestra el valor de RMSE de los parametros mencionados. Las curvas de
error mostradas presentan un comportamiento tıpico de los algoritmos IMM, en las que se pue-
den observar fases de transicion habituales al inicio y terminacion de las dos maniobras de la
trayectoria definida. Debido al retardo de intercambio de las probabilidades de los diferentes
modelos definidos, el algoritmo no sera capaz de adaptarse a la maniobra de manera inmedia-
ta. Esto provocara que la estimacion del filtro cometa errores de estimacion durante un corto
intervalo de tiempo hasta detectar la maniobra y adaptarse a la misma.
Figura 9.10: Evaluacion IMM: RMSE de posicion, velocidad y rumbo.
Dado que los modelos de maniobra definidos tratan constantemente de estimar la velocidad
angular de giro de la aeronave, puede observarse que durante las fases de maniobra se come-
teran errores mayores que en los intervalos rectilıneos, ya que este parametro no se mantendra
completamente constante debido al ruido de las medidas recibidas. Una manera de ganar pre-
cision en este aspecto podrıa darse mediante la definicion de un mayor numero de modelos de
giro ajustados a determinados tipos de giro (desde lentos a bruscos) a cambio de aumentar del
coste computacional del sistema.

104 CAPITULO 9. PRUEBAS DEL SISTEMA
Por otra parte, cabe destacar que dado que el estado inicial de la aeronave se ha conside-
rado desconocido, durante las primeras muestras el filtro confiara unicamente en las medidas
recibidas ante la ausencia de informacion de estimaciones anteriores. En consecuencia, esta
etapa de inicializacion del filtro provoca los elevados errores iniciales apreciables en todos los
parametros de la Figura 9.10. Sin embargo, puede observarse como a medida que el filtro va
recibiendo mas medidas, los errores descienden y el filtro se ajusta en la medida de los posible
a la trayectoria idealmente seguida por la aeronave.
Por ultimo, la Figura 9.11 muestra la transicion de probabilidades de los diferentes modelos
dinamicos del filtro. Puede comprobarse que en los intervalos de maniobra de la aeronave, la
probabilidad correspondiente al sentido de giro de la curva toma los valores mas altos, mientras
que en intervalos en los que no existe ningun tipo de maniobra estas probabilidades prevalecen
con un valor bajo y sera el modelo rectilıneo el que predomine.
Figura 9.11: Transicion de probabilidades de modelos del IMM.
9.3. Evaluacion del Sistema Completo
Tras corroborar el correcto funcionamiento de los filtros de alineamiento y seguimiento im-
plementados, se procedera a analizar los resultados provistos por el sistema en su totalidad.

9.3. EVALUACION DEL SISTEMA COMPLETO 105
Para ello, la Seccion 9.3.1 detallara los resultados de la correccion que el sistema sera capaz
de aplicar cuando se reciban datos de entrada de tipo generados. Finalmente, en la Seccion 9.3.2
se analizaran los resultados obtenidos por el sistema cuando los datos de entrada procedan de
radares SSR de control de trafico aereo reales, pudiendo ası verificar la exactitud del modelo de
error de las medidas utilizado en este proyecto.
9.3.1. Datos Simulados
Esta seccion analizara los resultados obtenidos cuando las detecciones radar recibidas por el
sistema sean generadas por la propia interfaz de simulacion a partir del procedimiento presen-
tado en la Seccion 5.1. Por tanto, el objetivo principal sera evaluar la precision de la correccion
que el sistema aplicara a partir de la estimacion de sesgos vista en la Seccion 9.1.
Por simplicidad y con el fin de profundizar en la situacion analizada en la Seccion 9.1, se
detallaran los resultados obtenidos para el escenario de la Figura 9.9 cuando el sistema imple-
mentado es utilizado en su totalidad, de manera que las medidas sean corregidas a partir de los
sesgos estimados y, posteriormente, fusionadas en el filtro de seguimiento.
En la etapa de generacion, el modelado de los sesgos de los radares se llevara a cabo nue-
vamente a partir de los parametros definidos en la Tabla 9.1. Por su parte, las desviaciones
tıpicas de ruido de medida en distancia y azimuth se incrementaran a σρ = 80m y σθ = 0.15º,
respectivamente, para ambos radares.
Finalizada la posterior etapa de filtrado donde se llevara a cabo tanto la estimacion y co-
rreccion de sesgos como la fusion de datos, la interfaz de simulacion permitira visualizar los
resultados obtenidos. Las Figuras 9.12 y 9.13 muestran la correccion que el algoritmo imple-
mentado aplica sobre las medidas sesgadas en una determinada zona del espacio aereo, donde
los asteriscos representan las medidas sesgadas y los cırculos las medidas corregidas. Puede
verse como las trayectorias corregidas en sesgo de ambos radares del escenario, (diferenciadas
por colores) quedan alineadas sobre la trayectoria ideal, eliminando ası el efecto de los sesgos.
Observando los resultados obtenidos, ha podido comprobarse que los parametros de sesgo
con los que se ha modelado el Radar 1 (color azul) provocan una mayor desviacion de las
medidas que las del Radar 2 (color rojo) especialmente a distancias lejanas debido a disponer
de parametros de sesgo en azimuth son considerablemente mayores.
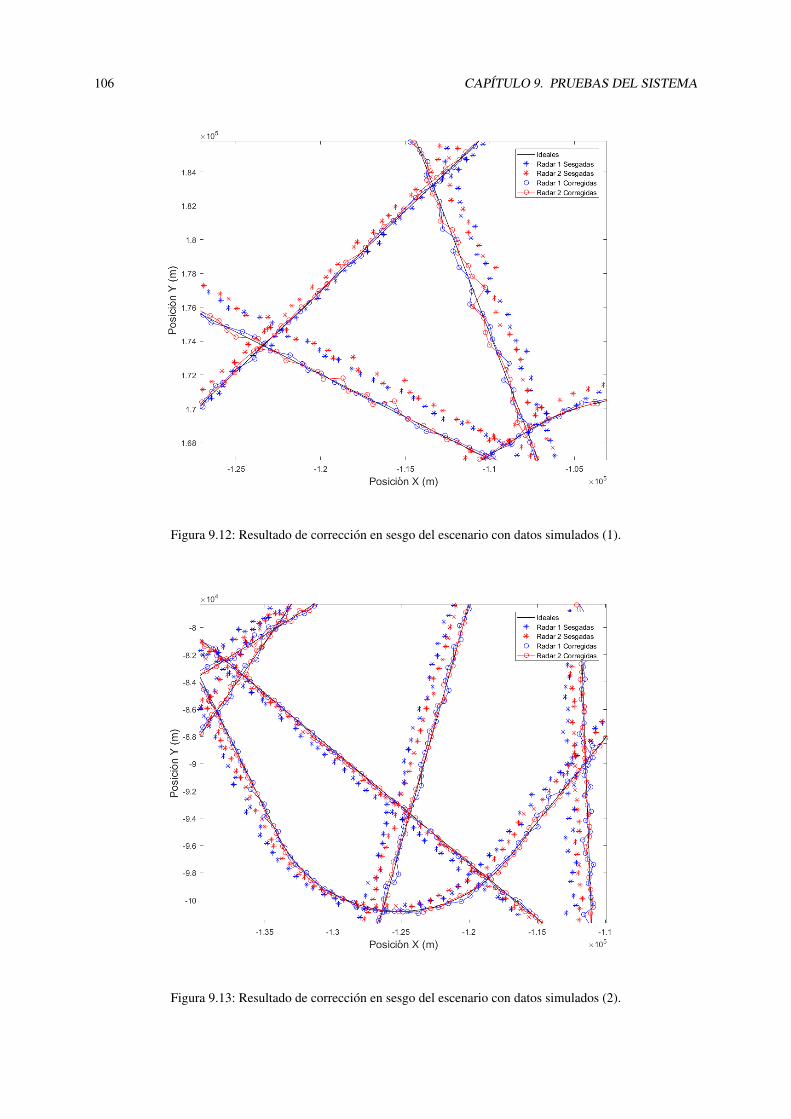
106 CAPITULO 9. PRUEBAS DEL SISTEMA
Figura 9.12: Resultado de correccion en sesgo del escenario con datos simulados (1).
Figura 9.13: Resultado de correccion en sesgo del escenario con datos simulados (2).

9.3. EVALUACION DEL SISTEMA COMPLETO 107
Una vez comprobada que la correccion de los sesgos es satisfactoria, se procede a consta-
tar la salida del filtro de seguimiento, cuyos parametros de entrada habran sido las posiciones
corregidas en sesgo, pero afectadas aun por el ruido de medida de los radares. La Figura 9.14
muestra tanto las trayectorias obtenidas a la salida del filtro de seguimiento (color verde) ası
como la trayectorias ideales (color negro) inicialmente definidas para cada una de las aerona-
ves. Como puede apreciarse, las trayectorias filtradas se superponen considerablemente con las
ideales, probando ası el funcionamiento correcto del sistema.
Figura 9.14: Resultado de trayectorias filtradas por el IMM.
A fin aproximar a la realidad y ofrecer una nueva vision del entorno simulado, se ha desarro-
llado un programa que permita transformar los resultados obtenidos a formato KML, de manera
que puedan ser visualizados en la herramienta Google Earth. Las Figura 9.15 permite visualizar
las medidas originales de los radares sesgados frente a la ideal, mientras que la Figura 9.16
sustituye las trayectorias originalmente medidas por las alineadas tras la correccion en sesgo.
Finalmente, la Figura 9.17 ofrece una vision general del resultado final del sistema mostrando
las trayectorias filtradas definitivas que componen el escenario.

108 CAPITULO 9. PRUEBAS DEL SISTEMA
Figura 9.15: Google Earth: Trayectorias sesgadas vs Trayectoria Ideal.
Figura 9.16: Google Earth: Trayectorias alineadas vs Trayectoria Ideal.

9.3. EVALUACION DEL SISTEMA COMPLETO 109
Figura 9.17: Google Earth: Trayectorias filtradas vs Trayectoria Ideal.
Por ultimo, al disponer de las trayectoria ideales al tratarse de un escenario generado, la Tabla
9.2 realiza una comparativa del Error Cuadratico Medio (RMSE) cometido en posicion por una
determinada trayectoria del escenario. Este calculo se llevara a cabo siguiendo la ecuacion 9.6
[9].
RMSE =
√√√√ 1
N
N∑i=1
[(xideal(k)− x(k))2 + (yideal(k)− y(k))2] (9.6)
donde (xideal(k), yideal(k)) representan la posicion de la trayectoria en el plano estereografico
en el instante temporal k mientras que (x(k), y(k)) representaran la posicion de la trayectoria
en la etapa correspondiente para el mismo instante temporal k.
Parametro RMSE Radar 1 RMSE Radar 2
Medidas Sin Correccion 1128.59 m 808.2 m
Medidas Corregidas en Sesgo 247.601 m 251.24 m
Trayectoria Filtradas 99.138 m 93.952 m
Tabla 9.2: RMSE de las trayectorias medidas en las diferentes fases del sistema.

110 CAPITULO 9. PRUEBAS DEL SISTEMA
9.3.2. Datos Reales
Tras comprobar la mejora de resultados que el sistema es capaz de proveer para datos simu-
lados, se procedera a evaluar el sistema bajo un escenario realista, en el que los datos de entrada
procedan de radares reales.
Tal y como se ha descrito en la Seccion 8.4, la interfaz de simulacion desarrollada en este
proyecto sera capaz de leer y procesar los archivos que contengan tanto la informacion de los
datos correspondientes a las medidas radar recibidas ası como la descripcion de los diferentes
radares utilizados en el escenario.
Los datos analizados contienen detecciones de un total de 227 trayectorias medidas por 11
radares independientes y con coberturas solapadas entre sı, tal y como puede apreciarse en la
Figura 9.18.
Figura 9.18: Rango de cobertura de los radares del escenario.
La Figura 9.19 muestra la totalidad las trayectorias medidas por cada uno de los radares de
este escenario diferenciadas por colores. Sin embargo, como cabıa esperar, los distintos sesgos
de medida de los radares podran provocar que un misma trayectoria presente diferentes trazas

9.3. EVALUACION DEL SISTEMA COMPLETO 111
separadas en el espacio aereo para cada uno de los radares. Este efecto puede comprobarse en
las Figuras 9.20 y 9.21, que debido a la extensa dimension del escenario analizado, enfocan
unicamente determinadas zonas del espacio aereo.
Figura 9.19: Escenario real. Trayectorias sesgadas.
El objetivo principal sera por tanto, comprobar que el sistema implementado estima y corrige
los sesgos de los radares, de manera que las medidas de una misma trayectoria detectada por
diferentes radares queden correctamente alineadas.
Una vez completado el procesado de los datos, se procedera a analizar los resultados obte-
nidos. Las Figuras 9.22 y 9.23 muestran la correccion aplicada a las zonas del espacio aereo
mostradas anteriormente en las Figuras 9.20 y 9.21. Como puede comprobarse, esta correc-
cion es considerable, ya que las trayectorias quedan considerablemente alineadas y afectadas
unicamente por los ruido de medida de los radares.
Finalmente, al igual que en el caso de datos simulados, las Figuras 9.24 y 9.25 muestran
las trayectorias obtenidas por el filtro de seguimiento a medida que haya ido recibiendo las
detecciones corregidas en sesgo de los multiples radares de escenario.
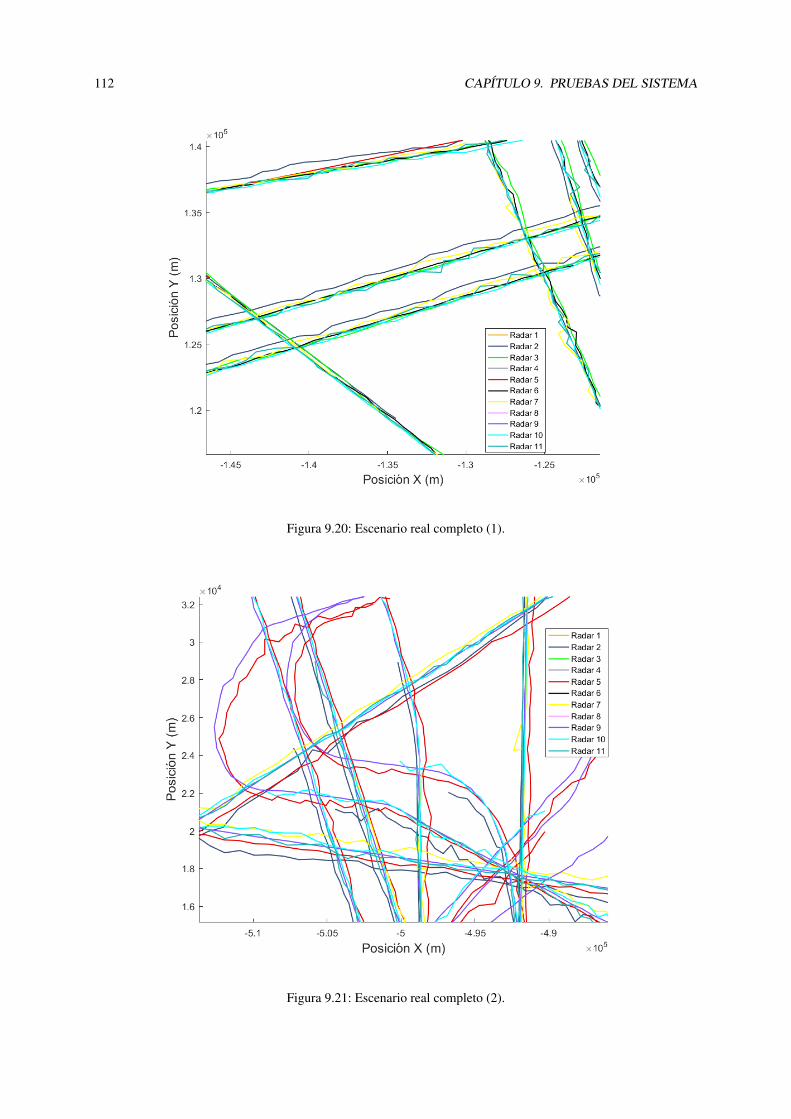
112 CAPITULO 9. PRUEBAS DEL SISTEMA
Figura 9.20: Escenario real completo (1).
Figura 9.21: Escenario real completo (2).

9.3. EVALUACION DEL SISTEMA COMPLETO 113
Figura 9.22: Escenario real. Trayectorias alineadas.
Figura 9.23: Escenario real. Trayectorias alineadas.

114 CAPITULO 9. PRUEBAS DEL SISTEMA
Figura 9.24: Escenario real. Trayectorias filtradas.
Figura 9.25: Escenario real. Trayectorias filtradas.

9.3. EVALUACION DEL SISTEMA COMPLETO 115
Por ultimo, a fin de obtener unas aproximaciones numericas de la mejora del sistema, se
calcularan los errores cometidos utilizando la estimacion RMSE para las diferentes fases del
sistema. Sin embargo, a diferencia de la evaluacion bajo la utilizacion de datos simulados, las
trayectorias ideales seran desconocidas, por lo que estos calculos no podran realizarse de la
misma manera. Por tanto, en lugar de calcular el RMSE de las medidas de cada radar con
respecto a una determinada trayectoria de referencia, se tratara de obtener una aproximacion
de la diferencia entre las posiciones medidas por los diferentes radares de una misma aeronave
antes y despues de la aplicacion de la correccion de sesgos.
Para poder aproximar correctamente las diferencias de posicion medida entre dos radares
independientes sera necesario extrapolar las detecciones de uno de ellos al instante temporal de
medida del otro, ya que, generalmente, el instante de deteccion no sera el mismo. Por tanto,
habra que disponer de, al menos, dos medidas por parte de uno de los radares en cuestion.
Dado que en este escenario cada aeronave es frecuentemente detectada por un elevado nume-
ro de radares simultaneamente, se ha optado por llevar a cabo estos calculos sobre un conjunto
de medidas. Esta etapa de agrupacion se llevara a cabo de una manera analoga al procedimiento
y caracterısticas presentadas en la Seccion 6.1 e ilustrado en la Figura 6.3, de manera que los
conjuntos cumplan las siguientes caracterısticas basicas:
Cada conjunto debe contener 2 medidas de un mismo radar.
Cada conjunto debe contener medidas de un mınimo de 2 radares independientes.
Cada conjunto debe contener el mınimo numero de medidas posible.
El procedimiento de calculo del RMSE para cada trayectoria se representa mediante las ex-
presiones (9.7)-(9.9). Las medidas de cada trayectoria del escenario formaran en un total de
Nconjuntos conjuntos, donde cada uno de ellos contendra medidas de NRB radares diferentes,
pudiendo ser este numero variable para cada conjunto. Para cada conjunto, se extrapolaran la
posiciones medidas por un determinado radar i, del cual se dispondra de 2 medidas, a los ins-
tantes temporales de medida del resto de los radares (j) que conformen el conjunto, de manera
que la diferencia en los ejes x e y pueda calcularse correctamente. Finalmente, el valor final de
error devuelto por el conjunto se obtendra promediando el total de las diferencias estimadas,
que dependera del numero de radares que compongan el conjunto.
errorx(n) =1
NRB − 1
NRB−1∑j 6=i
(xj(k)− xi(k)) (9.7)

116 CAPITULO 9. PRUEBAS DEL SISTEMA
errory(n) =1
NRB − 1
NRB−1∑j 6=i
(yj(k)− yi(k)) (9.8)
RMSEtrayectoria =
√√√√ 1
Nconjuntos
Nconjuntos∑n=1
[errorx(n)2 + errory(n)2] (9.9)
donde,
(xi(k),yi(k) se corresponden a la posicion, extrapolada al instante temporal k, medida por
el radar i.
(xj(k),yj(k) se corresponden a la posicion medida por el radar j en el instante temporal k.
La Tabla 9.3 recoge los resultados obtenidos aplicando los calculos correspondientes sobre
las medidas radar utilizando unicamente areas con coberturas solapadas de, al menos, 2 radares.
Los valores mostrados se corresponden al promedio del RMSE calculado para cada una de las
trayectorias del escenario contenidas en el area de cobertura comun de radares.
Parametro RMSE Estimado
Medidas Sin Correccion 454.13 m
Medidas Corregidas en Sesgo 288.19 m
Tabla 9.3: RMSE de las trayectorias medidas en las diferentes fases del sistema.
Como cabıa esperar a partir de los resultados visualizados en las figuras anteriormente mos-
tradas, la utilizacion del algoritmo reduce la separacion entre las medidas de los diferentes ra-
dares, donde gran parte del error restante sera debido al ruido de medida, que quedara reducido
posteriormente mediante el uso del Filtro de Seguimiento.
Por ultimo, cabe destacar que los valores RMSE obtenidos para las trayectorias sin correc-
cion podran ser variables en funcion de los radares que hayan proporcionado estas detecciones.
Esto se debera a que, como ha podido intuirse en las Figuras 9.20 y 9.21, los radares pade-
ceran de sesgos diferentes. Ademas, ha podido observarse que debido a los diferentes ruidos
de medida de los radares, algunas trayectorias podran mostrar diferencias de posicion mas ele-
vadas o inferiores tanto para las medidas sin correccion como para las corregidas en funcion
a los radares que las detectan, ya que, al igual que con los sesgos, sufriran ruidos de medida
diferentes.

Capıtulo 10
Conclusiones y Lıneas Futuras de Trabajo
A lo largo de este Trabajo de Fin de Master se han implementado algunas de las principales
funciones de un centro de procesado de datos de los sistemas de control de trafico aereo sobre
entornos multirradar. En particular, el proyecto ha centrado sus objetivos en la estimacion y
correccion de los sesgos de medida de los radares. Asimismo, se ha implementado una etapa
final de fusion de datos radar, de manera que pueda visualizarse la trayectoria que se mostrara
en la pantalla del controlador aereo.
En primer lugar, se destaca que el desarrollo de un entorno de simulacion sobre el cual se
han podido definir escenarios arbitrarios y obtener los correspondientes datos radar modela-
dos ha permitido verificar el correcto diseno y funcionamiento de los filtros de alineamiento
implementado y seguimiento implementados.
A su vez, la utilizacion de datos de tipo simulados ha permitido comprender el efecto de
un calculo incorrecto en alguna de las derivadas del filtro de alineamiento, ya que ha podido
comprobarse que habitualmente determinados parametros trataran de compensar, en la medida
de lo posible, los errores de estimacion de otros parametros.
Tras corroborar el correcto funcionamiento del sistema bajo la utilizacion de datos de tipo
generados, las pruebas presentadas en la Seccion 9.3.2 han demostrado que el algoritmo im-
plementado corrige los sesgos en las medidas de distancia, azimuth y altitud de los diferentes
radares reales de manera satisfactoria. De esta manera, se ha comprobado que el sistema sera
capaz de minimizar el RMSE entre trayectorias y llevar a cabo la correccion de sesgos correcta-
mente incluso aunque las medidas esten afectadas por ruido blanco o imprecisiones de medicion
aleatorias adicionales.
117

118 CAPITULO 10. CONCLUSIONES Y LINEAS FUTURAS DE TRABAJO
Cabe destacar que la utilizacion de un modelo de errores con un alto numero de grados de
libertad (o parametros) como el escogido para este trabajo permite ajustar de manera mas precisa
los sesgos a corregir para cada uno de los radares. Sin embargo, el tiempo de convergencia al
valor ideal del conjunto de parametros sera mayor que para modelos mas simples o con un
numero de parametros inferior como el presentado en [18].
Por ultimo, ha podido comprobarse que la utilizacion de un filtro de seguimiento IMM que
combine diferentes modelos de movimiento mejora las prestaciones que ofrecerıa un simple
filtro de Kalman con un modelo de movimiento fijo. Sin embargo, el coste computacional del
sistema sera mayor debido a que esta implementacion equivaldra aproximadamente a computar
varios filtros de Kalman de manera paralela.
10.1. Lineas de Continuacion Futuras
De cara a futuras implementaciones relativas a este proyecto, cabrıa destacar dos lineas de
continuacion.
En primer lugar, el modelo de sesgos utilizado tanto para generar datos como para la es-
timacion de parametros asume que las condiciones atmosfericas son constantes a lo largo del
escenario, de manera que los errores de medida cometidos por todos los barometros de las dife-
rentes aeronaves se consideraran iguales. Dado que en la realidad las condiciones atmosfericas
variaran lentamente con la posicion, como futura implementacion podrıa considerarse una ex-
tension del modelo teniendo en cuenta unas determinadas funciones de presion y temperatura
que varıan con la posicion geografica.
Por otro lado, podrıa resultar de interes desarrollar un filtro de seguimiento IMM que com-
bine un mayor numero de modelos que el implementado en este proyecto, de forma que pueda
comprobarse que las trayectorias filtradas se ajustan de una manera mas precisa a los diferentes
tipos de maniobras que realicen las aeronaves en un entorno de trafico aereo.

Anexo A
Transformacion de coordenadas
A.1. Conversion WGS84 a ENU
El proceso de transformacion de coordenadas geodesicas a locales diferencia dos etapas, ya
que la conversion entre estos dos sistemas de coordenadas no se puede llevar a cabo de manera
directa.
El primer paso consiste en una conversion intermedia del sistema geodesico a las coordena-
das Earth-Centered Earth-Fixed (ECEF). Una descripcion mas extensa del sistema ECEF puede
encontrarse en este anexo en el apartado A.1.1. A continuacion, en la Seccion A.1.2 se descri-
bira el proceso de conversion de coordenadas geodesicas al sistema ECEF.
Finalmente, una vez realizada esta primera conversion, se realizara una segunda transforma-
cion del sistema ECEF a ENU, cuyo proceso se detalla en la Seccion A.1.3.
A.1.1. Earth-Centered Earth-Fixed
Earth-Centered Earth Fixed (ECEF) es un sistema de coordenadas cartesianas con origen en
el centro de masas de la Tierra y que rota conjuntamente con el planeta, de manera que sus ejes
permanezcan fijos con respecto a la superficie del mismo. Este sistema se define a partir de las
siguientes caracterısticas [5]:
El origen del sistema es el centro de masa de la Tierra.
El eje Z se corresponde al eje de rotacion de la Tierra.
119

120 ANEXO A. TRANSFORMACION DE COORDENADAS
El eje X cruza la interseccion entre el plano ecuatorial y el meridiano de referencia Green-
wich.
El eje Y completa el sistema formando 90º tanto con respecto a los ejes X y Z.
La Figura A.1 ofrece una vision de este sistema de coordenadas.
Figura A.1: Sistema de coordenadas ECEF
A.1.2. Conversion de coordenadas geodesicas a ECEF
Siguiendo el proceso presentado en [5], la conversion de coordenadas geodesicas a ECEF
sigue el sistema de ecuaciones A.1,
Xe
Y e
Ze
=
(RN + h) cosϕ cosλ
(RN + h) cosϕ sinλ
(RN(1− e2) + h) sinϕ
(A.1)
donde,

A.1. CONVERSION WGS84 A ENU 121
(Xe, Y e, Ze) es la tupla de coordenadas ECEF
h altitud del blanco
λ es la longitud del punto
ϕ es la latitud del punto
e es la excentricidad
Por otro lado, RN representa el Radio Normal de la Tierra, que define el radio del elipsoide
terrestre en direccion este a oeste y viene representado por
RN =a√
1− e2 sin2 ϕ(A.2)
donde a es el Semieje Mayor descrito en la Seccion 3.1.1.
A.1.3. Conversion de ECEF a ENU
Una vez realizada la conversion de coordenadas geodesicas al sistema ECEF, se llevara a ca-
bo una nueva operacion para poder transformar finalmente el sistema de coordenadas geodesico
al sistema de coordenadas locales ENU.
En base a los procesos descritos en [5] y [25], el proceso de transformacion viene dado por
la matriz de rotacion A.3.
Recef2enu =
− sinλ0 cosλ0 0
− sinϕ0 cosλ0 − sinϕ0 sinλ0 cosϕ0
cosϕ0 cosλ0 cosϕ0 sinλ0 sinϕ0
(A.3)
donde λ0 y ϕ0 se corresponden, respectivamente, a la longitud y latitud de un punto de
referencia sobre la superficie terrestre escogido arbitrariamente que representara el origen de
coordenadas ENU.
De esta manera, el proceso de conversion de ECEF a ENU queda definido por la ecuacion
A.4 E
N
U
= Recef2enu
(Xe −Xe
0)
(Y e − Y e0 )
(Ze − Ze0)
(A.4)
donde,

122 ANEXO A. TRANSFORMACION DE COORDENADAS
(E,N,U) es la tupla de coordenadas ENU
(Xe, Y e, Ze) es la tupla de coordenadas ECEF de la posicion objetivo a convertir
(Xe0 , Y
e0 , Z
e0) es la tupla de coordenadas ECEF de la posicion de referencia escogida
Para este proyecto, los ejes del sistema de coordenadas ENU se particularizaran de la si-
guiente manera en el sistema de coordenadas cartesiano de coordenadas locales:
Eje East −→ Eje X.
Eje North −→ Eje Y.
Eje Up −→ Eje Z.
A.2. Conversion ENU a Esfericas
La conversion entre los ejes (X, Y, Z) del sistema de coordenadas locales ENU a esfericas
(r, θ, φ) puede deducirse a partir de la Figura A.2 y viene representado por las ecuaciones (A.5
- A.7) de acuerdo al proceso matematico analogo al descrito en [26].
Figura A.2: Transformacion de coordenadas locales a esfericas.

A.2. CONVERSION ENU A ESFERICAS 123
r =√x2 + y2 + z2 (A.5)
θ = arctanx
y(A.6)
ϕ = arctanz√
x2 + y2(A.7)
A su vez, la transformacion inversa es facilmente deducible de manera analoga en la pro-
pia Figura A.2, siendo (A.8 - A.10) el conjunto de ecuaciones que conforma el sistema con
capacidad de transformar de coordenadas esfericas a coordenadas locales ENU [26].
x = r sin θ cosϕ (A.8)
y = r cos θ cosϕ (A.9)
z = r sinϕ (A.10)

124 ANEXO A. TRANSFORMACION DE COORDENADAS

Anexo B
Filtro de Kalman
Un estimador optimo es un algoritmo computacional que procesa unas determinadas me-
didas con el objetivo de obtener estimaciones de mınimo error [19]. El filtro de Kalman es
considerado como una de las tecnicas de filtrado optimo mas utilizadas para estimar los estados
de sistemas lineales. Para ello, considera conocidas las siguientes propiedades:
El modelo dinamico del sistema.
Distribuciones estadısticas de los ruidos que afectan a las medidas.
Informacion de la condicion inicial.
El algoritmo considera que el ruido introducido por los sensores de medida sera de tipo
gaussiano. Por tanto, el filtro de Kalman constituira una solucion recursiva optima (de mıni-
ma varianza) siempre y cuando los modelos estadısticos y dinamicos asumidos se ajusten a la
realidad [19].
El objetivo del filtro se basa en la combinacion de los modelos estadısticos y dinamicos
mencionados para poder llegar a una estimacion del estado del sistema. Este estado estimado
se representa mediante un vector x(k) que incluye generalmente los parametros de posicion y
velocidad del blanco, aunque es extensible a la inclusion de parametros adicionales como los
de aceleracion. A su vez, este vector de estimacion estara asociado a una matriz de covarianzas
del error P (k), que vendra definida por,
P (k) = E[(x(k)− x(k)(x(k)− x(k)T ] (B.1)
125

126 ANEXO B. FILTRO DE KALMAN
El filtro de Kalman representa el modelo del sistema mediante la ecuacion (B.2),
x(k) = Φ(k − 1)x(k − 1) + w(k − 1) (B.2)
donde,
Φ(k− 1) es la matriz que modela la transicion del estado del sistema del instante temporal
k − 1 a k.
w(k − 1) es el vector de ruido de proceso que se asume con distribucion normal, blanco y
de media cero, cuya matriz de covarianza viene representada por Q(k).
Por otra parte, el modelo de medida que se asumido por el filtro para los sensores sera,
z(k) = H(k)x(k) + n(k) (B.3)
donde,
H(k) caracteriza la proyeccion de componentes del vector de estado x(k) sobre el vector
de medida z(k).
El vector n(k) se corresponde al ruido de medida por el que se veran afectados los senso-
res, y seguira una distribucion normal, blanca y de media cero. La matriz de covarianzas
de este vector de ruido vendra representada por R(k).
B.1. Inicializacion
En primer lugar, se llevara a cabo el proceso de inicializacion del filtro. Para ello, sera nece-
sario determinar los valores iniciales que tomaran tanto el vector de estado como la matriz de
covarianzas del error de estimacion.
El vector de estado se inicializara indicando el valor esperado de cada uno de los parametros
que lo componen [19].
x(0) = E[x(0)] (B.4)
Generalmente, si no se conoce esta informacion, el vector x se inicializa simplemente a partir
de la informacion proveniente de la primera medida z(0) recibida. Cabe destacar que para llevar
a cabo la inicializacion de parametros como la velocidad o la aceleracion, la utilizacion de una
unica medida no sera suficiente para inicializarlos.

B.2. ESTIMACION RECURSIVA 127
A su vez, la matriz de covarianzas P se inicializara indicando el valor de incertidumbre
esperado para cada uno de los parametros que componen el vector de estado [19].
P (0) = E[(x(0)− x(0))(x(0)− x(0)T ] (B.5)
Las varianzas que definen la incertidumbre de cada parametro compondran la diagonal de la
matriz P y mientras que los terminos cruzados se asumiran nulos inicialmente.
B.2. Estimacion Recursiva
Tras el proceso de inicializacion, el filtro de Kalman iterara de manera recursiva para llevar
a cabo la estimacion de parametros. Cada una de estas iteraciones diferencia dos etapas:
Prediccion y extrapolacion de la estimacion de medidas y de la covarianza de error de las
mismas.
Actualizacion de las prediciones mediante la incorporacion de una nueva medida.
En primer lugar, en la etapa de prediccion, la extrapolacion del vector de estado x se calculara
mediante la expresion (B.6), mientras que la extrapolacion de la matriz de covarianzas P se
llevara a cabo mediante la expresion (B.7) [19],
x(k|k − 1) = Φ(k − 1)x(k − 1|k − 1) (B.6)
P (k|k − 1) = Φ(k − 1)P (k − 1|k − 1)Φ(k − 1)T +Q(k − 1) (B.7)
donde,
x(k − 1|k − 1) es el vector de estado actualizado en la iteracion anterior para el instante
temporal k − 1.
x(k|k − 1) es el vector de estado predicho para el instante temporal k a partir del vector
de estado x(k − 1|k − 1).
P (k − 1|k − 1) es la matriz de covarianzas de error actualizado en la iteracion anterior
para el instante temporal k − 1.
P (k|k−1) es la matriz de covarianzas de error predicha para el instante temporal k a partir
de la matriz P (k − 1|k − 1).

128 ANEXO B. FILTRO DE KALMAN
A continuacion, se procedera a la actualizacion tanto del vector de medida como de la matriz
de covarianzas obtenidas en la etapa de prediccion. Para ello, se llevara a cabo el calculo de la
matriz de ganancia de Kalman K, que minimiza los elementos de la diagonal de la matriz de
covarianzas P . Esta matriz se calcula mediante la expresion (B.8) [19].
Una vez calculada la matriz de ganancias de Kalman, la actualizacion del vector de estado se
llevara a cabo mediante la expresion (B.9) utilizando la medida recibida para el instante tempo-
ral k, representada por z(k) [19]. De la misma manera, la matriz de covarianzas se actualizara
a partir de la expresion (B.10).
K(k) = P (k|k − 1)H(k)T [H(k)P (k|k − 1)H(k)T +R(k)]−1 (B.8)
x(k|k) = x(k|k − 1) +K(k)[z(k)−H(k)T x(k|k − 1)] (B.9)
P (k|k) = (I −K(k)H(k))P (k|k − 1) (B.10)
donde,
x(k|k) es el vector de estado actualizado para el instante temporal k.
P (k|k) es la matriz de covarianzas de error actualizada para el el instante temporal k.
La Figura B.1 esquematiza el funcionamiento del filtro de Kalman.
Figura B.1: Filtro de Kalman [19].

Bibliografıa
[1] B. Olivier, G. Pierre, H. Nicolas, O. Loıc, T. Olivier, and T. Philippe. Multi Sensor Data
Fusion Architectures for Air Traffic Control Applications, 2009.
Disponible en: http://www.intechopen.com/books/sensor and data fusion/ mul-
ti sensor data fusion architectures for air traffic control applications.
[2] M.S. Nolan. Fundamentals of Air Traffic Control. Delmar CENGAGE Learning, 1990.
[3] W.H.L. Neven, T.J. Quilter, R. Weedon, and R.A. Hogendoorn. Wide Area Multilateration.
Report on EATMP TRS 131/04, 2005.
[4] I. Alonso Fernandez-Coppel. Localizaciones Geograficas: El Datum.
http://www.cartesia.org/data/apuntes/cartografia/cartografia-geograficas-utm-datum.pdf,
2001. Ultimo acceso 08-01-2018.
[5] A. Noureldin, T. B. Karamat, and J. Georgy. Fundamentals of Inertial Navigation,
Satellite-Based Positioning and their Integration. Springer, 2013.
[6] V. Nogueira Froes. Topografıa Basica. Pontifıcia Universidade Catolica de Goias, Brasil,
2015.
[7] Mathworks. Transform Cartesian coordinates to spherical.
https://es.mathworks.com/help/matlab/ref/cart2sph.html, 2002. ’Ultimo acceso 08-01-
2018.
[8] J.P. Snyder. Map Projections - A Working Manual. U.S. Geological Survey Professional
Paper, 1987.
[9] A. Jarama, J. Lopez-Araquistain, G. de Miguel Vela, and J.A. Besada. Complete Syste-
matic Error Model of SSR for Sensor Registration in ATC Surveillance Networks. Sensors
MDPI, 2017.
129

130 BIBLIOGRAFIA
[10] B. R. Bean. The Radio Refractive Index of the Air. Proceedings of the IRE, vol. 50, no 3,
1962.
[11] Y. Zeng. Radar Beam Tracing Methods Based on Atmospheric Refractive Index. Journal
of Atmopheric and Oceanic Technology, 2014.
[12] D. K. Barton. Radar System Analysis and Modelling. Artech House, 2004.
[13] G. de Miguel Vela, J. Besada, and J.M. Abbud. Correction of systematic errors in Wide
Area Multilateration. Tyrrhenian International Workshop on Digital Communications-
Enhanced Surveillance of Aircraft and Vehicles, 2011.
[14] D. Poles. Revision of Atmosphere Model in BADA Aircraft Performance Model. EURO-
CONTROL Experimental Centre, 2010.
[15] E. Weisstein. Great Circle. http://mathworld.wolfram.com/GreatCircle.html, 2002. Ulti-
mo acceso 08-01-2018.
[16] E. Weisstein. Small Circle. http://mathworld.wolfram.com/SmallCircle.html, 2002. Ulti-
mo acceso 08-01-2018.
[17] I. Simeonova and T. Semerdjiev. About the Specifics of the IMM Algoritm Design. Nu-
merical Methods and Applications. NMA 2002. Lecture Notes in Computer Science, vol
2542., 2003.
[18] X. Lin, Y. Bar-Shalom, and T. Kirubarajan. Multisensor-Multitarget Bias Estimaion for
General Asynchronous Sensors. IEEE Transactions on Aerospace and Eslectronic Systems
Vol.41, 2005.
[19] A. Gelb, J.F. Kasper, R.A. Nash, C.F. Price, and A. Sutherland. Applied Optimal Estima-
tion. The Analytic Sciences Corporation, 1974.
[20] X. Lin and Y. Bar-Shalom. Exact Multisensor Dynamic Bias Estimation with Local Tracks.
Proceedings of the Sixth International Conference of Information Fusion, 2003.
[21] Y. Bar-Sahlom, X. Tian, and P. K. Willet. Tracking and Data Fusion: A Handbook of
Algorithms. YBS Publishing, 2011.
[22] K. Kastella and M. Biscuso. Tracking Algorithms for Air Traffic Control Applications. Air
Traffic Control Quarterly, Vol.3, 1995.
[23] A. Papoulis. Probability, Random Variables and Stochastic Processes. McGraw-Hill,
1965.

BIBLIOGRAFIA 131
[24] A.M. Law and W. D. Kelton. Simulation Modeling and Analysis. McGraw Hill Interna-
tional Series, 2000.
[25] S.P. Drake. Converting GPS Coordinates to Navigation Coordinates. Defence Science
and Technology Group, 2002.
[26] G.M. Siouris. Aerospace Avionics Systems: A Modern Synthesis. Academic Press, 1993.





























