Embed Size (px)
Citation preview

UNIVERSIDAD DE MAGALLANESFACULTAD DE INGENIERIA
DEPARTAMENTO DE ELECTRICIDAD
DISEÑO DE PANEL DE CONTROL Y VIGILANCIA PARA VARADERO EN PLANTA INDUSTRIAL DE ASMAR MAGALLANES
BASADO EN EL USO DE PLC MODICON Y SOFTWARE LABVIEW.
MIGUEL ANGEL PRIETO QUEZADA -2008-

UNIVERSIDAD DE MAGALLANESFACULTAD DE INGENIERIA
DEPARTAMENTO DE ELECTRICIDAD
DISEÑO DE PANEL DE CONTROL Y VIGILANCIA PARA VARADERO EN PLANTA INDUSTRIAL DE ASMAR MAGALLANES
BASADO EN EL USO DE PLC MODICON Y SOFTWARE LABVIEW
“Trabajo de titulación presentado en conformidad a los
requisitos para obtener el Título de: Ingeniero de
Ejecución en Electricidad mención Electrónica
Industrial”
MIGUEL ANGEL PRIETO QUEZADA-2008-

AGRADECIMIENTOS i
Para quien en las largas jornadas de estudio y sin claudicar su apoyo estuvo
fielmente a mi lado, brindándome constantemente su amor y una voz firme y serena que
me hacía ver de lo que realmente podría lograr. Es para ti, amada Elizabeth que van mis
sinceros agradecimientos y te dedico este trabajo que sin lugar a dudas también es parte
de tu esfuerzo como esposa abnegada que siempre me apoyó y confió en mí.
También agradezco a mi profesor guía Sr. Jorge Naguelquin por el apoyo prestado
y su voluntad para poder resolver todas mis dudas.
Como también agradezco a la Gerencia de la Planta Industrial de Asmar
Magallanes por la confianza depositada en mí y de esta forma poder llevar acabo el
desarrollo del presente proyecto y a todos mis compañeros de trabajo que me apoyaron y
brindaron su ayuda en todo momento.

RESUMEN ii
Para el desarrollo del presente proyecto se ha generado la idea de poder optimizar
las faenas de maniobras de varada y desvarada de naves y embarcaciones que realizan
reparaciones en el Astillero de Asmar Magallanes, mediante la implementación de un
sistema de monitoreo que sirva de control y vigilancia, prestando apoyo a las
coordinaciones e instrucciones que se imparten durante el desarrollo de dichas
maniobras.
En la actualidad, no se cuenta con ningún dispositivo o sistema que realice estos
monitoreos y solo se ejecutan en forma manual y mediante un sistema de comunicaciones
por HF. El astillero ocupa gran cantidad de tiempo en el desarrollo de estas maniobras y
esta actividad es su fuente principal de ingresos, pues es la razón de ser de todo dique, el
de subir a varadero naves para sus reparaciones en seco.
Por tal motivo la idea es instalar 4 sensores tipo interloock en las camadas un
sensor fotoeléctrico en la parte superior del carro y un anemómetro cuyas señales se
canalizarán por medio de un cable blindado y acondicionado para ambiente submarino.
Posteriormente estas señales serán recepcionadas por el software LabVIEW que nos
permitirán monitorear los dispositivos que en el hemos dispuesto en terreno, también se
instalará un monitor de TV con señal HF que nos permita ver en tiempo real los
movimientos del carro de varada y de las naves que se disponen a subir a varadero.
Debido a que el objetivo es poder controlar en forma remota 4 winches neumáticos, los
cuales cumplen la función de ubicar y posicionar las naves al interior del carro de varada.
Para esto se construirá una consola de operación mediante 4 pulsadores que controlen en
forma remota las 4 electroválvulas. Estas señales también serán canalizadas por el
multiconductor que traslada las señales de los sensores. Dicho control de los winches se
realizará utilizando el PLC Modicon.

INDICE GENERAL iii
CAPITULO PRIMERO: INTRODUCCION PAGINA
1.1 ASPECTOS GENERALES…………………………………………….. 1
1.2 HISTORIA REGIONAL…………………………………………………. 2
1.3 OBJETIVO GENERAL DE LA MEMORIA……………………………. 4
CAPITULO SEGUNDO: CONCEPTOS GENERALES DEL CARRO DE VARADA
2.1 PRINCIPIO DE FUNCIONAMIENTO…………………………………. 5
CAPITULO TERCERO: PROPUESTA DE SOLUCION PARA AUTOMATIZACION
3.1 DESARROLLO DE L PROYECTO………………………….…….... 12
3.2 PANEL FRONTAL DE MONITOREO………………………………. 15
3.3 TARJETA DE ADQUISICION DE DATOS PCI 6025 E……………. 16
CAPITULO CUARTO: GENERALIDADES PLC MODICON E 984-265
4.1 BREVE DESCRIPCION DE LOS MODULOS PLC E984-265…….. 18
4.2 CARACTERISTICAS CONTROLADOR E984………………………. 19
4.2.1 EL CONTROLADOR E 984……………………………………. 19
4.2.2 PRINCIPIO DE FUNCIONAMIENTO…………………………. 21
4.2.3 MEMORIA Y PROGRAMACION DEL SISTEMA……………. 22
4.2.4 SISTEMA DE ENTRADAS Y SALIDAS I/O………………….. 23
4.2.5 COMUNICACIONES……………………………………………. 24
4.2.6 CONFIGURACION DE NUESTRO PROYECTO……………. 25
4.2.7 DIAGRAMA ESCALERA……………………………………….. 27
4.3 LABORATORIO................................................................................ 28
4.3.1 IMPLEMENTACION EN LABORATORIO……………………. 28
4.3.2 PLC Y MODULOS………………………………………………. 29
4.3.3 MODULOS DE ENTRADA Y SALIDA………………………… 30
4.3.4 CONSOLA DE MANDOS………………………………………. 31

INDICE GENERAL iv
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT
5.1 INTRODUCCION……………………………………………………….. 32
5.2 PROGRAMACION DE NUESTRO PROYECTO…………………….. 34
5.2.1 ASIGNACION DE ENTRADAS Y SALIDAS…………………. 35
5.2.2 ASIGNACION DE POSICION DE MODULOS………………. 36
5.2.3 EDITOR DE VARIABLES………………………………………. 37
5.3 IMPLEMENTACION EN LABORATORIO…………………………….. 38
5.3.1 CONEXION DEL PROGRAMA AL PLC………………………. 38
CAPITULO SEXTO: IMPLEMENTACION GENERAL
6.1 CONSOLAS DE OPERACION GENERAL…………………………… 43
6.2 SALA DE CONTROL…………………………………………………… 44
6.3 MODO DE OPERACION………………………………………………. 45
CAPITULO SEPTIMO: EVALUACION ECONOMICA
7.1 INTRODUCCION………………………………………………… 46
7.2 CUADRO DE GASTOS…………………………………………………. 47
7.3 PLC MODICON………………………………………………………….. 48
7.4 TARJETA DE ADQUISICION DE DATOS…………………………… 49
7.5 SENSOR DE POSICIONAMIENTO…………………………………… 50
7.6 SENSORES DE CONTACTO………………………………………….. 51
7.7 ANEMOMETRO…………………………………………………………. 52
7.8 CAMARA DE VIGILANCIA……………………………………………... 53
7.9 CABLE MULTICONDUCTOR………………………………………….. 54
7.10 MOTOREDUCTOR……………………………………………………… 55
7.11 ELECTROVALVULA……………………………………………………. 56
7.12 MANO DE OBRA……………………………………………………….. 57
CAPITULO OCTAVO: CONCLUSIONES…………………………………………… 59
CAPITULO NOVENO: REFERENCIAS BIBLIOGRAFICAS……………………… 60

INDICE GENERAL v
APENDICE A: BREVE REFERENCIA TECNICA DEL CARRO DE VARADA…. 61
APENDICE B: IMAGENES DE UNA SECUENCIA DE VARADA……………….. 62
APENDICE C: BREVE DESCRIPCION DE MODULOS DE ENTRADA Y SALIDA DEL
PLC MODICON E984 – 265………………………………………... 65
APENDICE D: BREVE DESCRIPCION TECNICAS DE:.....……….…………….. 67
D.1 SENSORES…………………………………………………….. 62
D.2 ANEMOMETRO………………………………………………… 63
D.3 MOTOREDUCTORES………………………………………… 64
D.4 CABLE DE CONTROL...……………………………………. 65
D.5 TARJETA DE ADQUISICION DE DATOS………………….. 66
D.6 PLC MODICON………………………………………………… 67
D.7 ELECTROVALVULA…………………………………………. 68
APENDICE E: BREVE DESCRIPCION TECNICA DE SOFTWARE LABVIEW… 69
APENDICE F: COTIZACIONES……………………………………………………… 75
APENDICE G: IMAGENES DE LABORATORIO………………………………… 82
APENDICE H: PLANO ESQUEMATICO……………………………………………. 87

CAPITULO PRIMERO
INTRODUCCION

CAPITULO PRIMERO: INTRODUCCION 1
1.1 ASPECTOS GENERALES
Para poder dar una idea más amplia del tema a exponer, conviene señalar que el
principal objetivo que motivó el desarrollo del presente proyecto no es otro que sustentar
la idea de poder potenciar a la planta industrial de Asmar Magallanes, que posee el título
del Astillero “MAS AUSTRAL DEL MUNDO” en la cual, su administración gerencial a
nivel corporativo están proyectando la idea y la necesidad de poder contar con un
varadero de mayor longitud, en donde podamos recibir y aparcar una mayor cantidad de
naves. Por tal motivo, he querido aportar a la idea de la empresa de contar con un
Astillero más moderno, autónomo y versátil incorporando un sistema de control y
vigilancia a las maniobras de varada y desvarada.
Uno de los objetivos será poder simular en laboratorios los distintos sensores que
se utilizarán para nuestro proyecto. También por otra parte es necesario hacer un catastro
de materiales y mano de obra utilizada para llevar acabo el proyecto de manera de poder
plantear la viabilidad y beneficio que implicaría dicha modernización.
Para darle un enfoque más realista es conveniente mencionar que en la actualidad
el estrecho de Magallanes es un paso marítimo internacional, casi obligatorio para la
mayoría de las embarcaciones que transitan por estas aguas, y por las cuales se aprecia
un gran flujo de naves y que en más de alguna ocasión nos han demandado trabajo a
gran escala.
En el escenario de una eventual mantención al canal de Panamá nuestro Estrecho
de Magallanes pasaría a ser un paso obligatorio para la mayoría de las naves, lo cual, sin
lugar a dudas traería innegablemente un mayor requerimiento por los servicios de nuestro
Astillero.

CAPITULO PRIMERO: INTRODUCCION 2
1.2 HISTORIA REGIONAL
La historia de los apostaderos navales en la región data desde 1892 en cuya fecha
la Armada comienza a desarrollar la actividad naviera en la zona. Prestando servicios a
las islas y lugares apartados en el estrecho.
En dicha época eran los hermanos Bónacic los únicos que prestaban servicios para
varadas de buques de hasta 1000 Toneladas. Y realizaban carenas y maestranza en
general. En esta sociedad con los hermanos Bónacic participaron también los armadores
Braun y Blanchard, los cuales luego de varias décadas de fusión toman el control absoluto
de los astilleros y pasaron a ser un establecimiento en su género como el más grande
montado en la costa sur del pacífico.
Luego en 1941 la compañía Interoceánica adquiere a Braun y Blanchard además
del varadero Miraflores ubicado en la Av. 21 de Mayo con Miraflores, 8 años más tarde
arrienda los mismos emplazamientos a la Compañía Marítima de Punta Arenas S.A.
(COMAPA). Este ambicioso proyecto duró muy poco, pues por mala administración y falta
de carga de trabajo el gobierno autoriza a la Armada de Chile a la expropiación de ambas
instalaciones. Y es así como nace en 1953 Asmar Magallanes en los terrenos que hoy se
conocen como Asmar 21 de Mayo frente al hogar del niño de Miraflores.
En marzo de 1983 Asmar adquiere terrenos pertenecientes a la Fuerza Aérea de
Chile en Bahía Catalina con el propósito de instalar un Astillero. Para tal efecto requería
de un socio nacional o extranjero. Y fue así como el 21 de septiembre de 1983 se contrajo
sociedad con “SANDOCK AUSTRAL LTDA.” Compañía Sudafricana con la cual se
construiría un Astillero para Naves superior a 1000 ton. Esta sociedad llevaría el nombre
de Sociedad Astilleros de Magallanes Ltda. (SAEM)
Con dicha sociedad se dio la prioridad a la construcción de un elevador marino de
4000 toneladas de levante diseñada por la firma norteamericana Crandall.
En el año 1992 Asmar absorbe a SAEM y se transforma así en un segundo astillero
de la planta industrial de Asmar (M) el cual operó con el nombre de Astillero Bahía
Catalina a contar de 1993.

CAPITULO PRIMERO: INTRODUCCION 3
Posteriormente en los años 2002-2003 se inicia el traslado de las instalaciones de
Asmar 21 de Mayo para concentrar todas la faenas de maestranza, carena y reparaciones
de naves en el Astillero de Bahía Catalina en donde hasta la fecha se desarrollan las
actividades como Astilleros y Maestranzas de la Armada ASMAR MAGALLANES.

CAPITULO PRIMERO: INTRODUCCION 4
1.3 OBJETIVO DE LA MEMORIA
El objetivo principal de la presente memoria, es elaborar un sistemas de control y
vigilancia que sirva de apoyo a las maniobras de varada y desvarada que se ejecutan en
el Astillero de ASMAR MAGALLANES, utilizando sensores que aporten registros reales e
instantáneos que puedan ser transmitidos a una sala de control, y desde ese punto poder
coordinar de mejor manera las maniobras de forma rápida y segura.
Otro objetivo esencial es poder disminuir la cantidad de personal que participa en
estas maniobras, con lo cual, se puede ahorrar un considerable costo en horas hombre
(HH) y recursos. También se puede reducir sustancialmente el tiempo empleado para la
ejecución de las maniobras de varadas y desvaradas incidiendo fuertemente en el costo
de recursos monetarios.
Con el propósito de poder cumplir con estos objetivos, se cuenta con dos
herramientas para el desarrollo del presente proyecto, una que es fundamental y guarda
relación con la utilización del PLC y sus aplicaciones y la otra que se refiere al uso del
software LabVIEW como una herramienta de apoyo hacia la presentación del presente
proyecto.
Además en este proyecto se irán incorporando conceptos y términos náuticos de
las maniobras utilizadas en la actualidad para el desarrollo de dichos trabajos.

CAPITULO SEGUNDO
CONCEPTOS GENERALES DEL CARRO DE VARADA

CAPITULO SEGUNDO: CONCEPTOS GENERALES DEL CARRO DE VARADA 5
2.1 PRINCIPIO DE FUNCIONAMIENTO
El varadero de la planta Industrial de Asmar Magallanes Fig. 2.1 cuenta con un carro
principal de 145 m. de longitud por 32 m. de ancho y en sus bases se pueden posar naves
de hasta 3575 toneladas. Dicho carro es introducido mar adentro mediante un riel marino,
hasta una distancia desde la orilla de playa de 300 m., en donde se recepcionan las naves
que se aprestan a subir a varadero.
También en la línea del carro de varada, se cuenta con una vía de extensión de 150
m. en donde se encuentra otro carro, pero esta vez de transferencia, el cual, es el
encargado de tomar la nave que se ha traído desde el mar y desplazarla por esta vía
hasta su extremo final y así poder disponer nuevamente del carro de varada para poder
ejecutar una nueva maniobra.
La longitud total del carro de varada más su vía de extensión alcanza los 295 m.
Ante lo cual en ocasiones se ha podido atender hasta 5 naves de diversas esloras y
tonelajes.
FIG. 2.1: CARRO DE VARADA VISTA LATERAL

CAPITULO SEGUNDO: CONCEPTOS GENERALES DEL CARRO DE VARADA 6
Para llevar acabo una maniobra de varada o desvarada es importante mencionar
los procedimientos que allí se ejecutan, por tal motivo se detallarán a continuación dichos
procedimientos:
• Reunión de coordinación para maniobra (1 día antes de la varada o
desvarada). Confección de camadas.
• Cálculo de tonelaje y desplazamiento de nave que será reparada.
• Verificación de condiciones climáticas y de mareas para el día y hora
señalada de la maniobra.
• En el día de la maniobra, la distribución del personal sobre pasarelas en el
carro de varada, que por lo general son entre 10 a 12 personas.
• Disposición de personal de buzos, los que irán indicando la ubicación de la
nave en el carro.
• Se dispone a bordo de la nave que será subida al carro o en el caso
contrario botada al mar, de un jefe de maniobras y el Ingeniero naval.
• En tierra y con el control general de la maniobra se dispone el gerente de
producción del Astillero.
En grandes rasgos el desarrollo de esta actividad, consiste en establecer
comunicaciones entre el jefe de maniobras a bordo de la nave, y el jefe de la maniobra
general en tierra, el cual observa desde otro plano las actividades que se realizan. Las
comunicaciones son efectuadas por equipos HF. En el caso de una maniobra de varada el
jefe de maniobras en la nave se comunica por medio de señales establecidas con el
personal de buzos, los que le indican la posición de la nave al interior del carro y cuanto
falta para que esta se pose sobre sus camadas.
Cuando la nave se encuentra en posición y afirmada al carro, este se procede a
izar lentamente para que la nave a medida que el carro sube esta baje y se descanse
correctamente sobre sus camadas y es en este punto en donde los buzos cumplen un rol
fundamental ya que son ellos los que disponen la posición final de la nave sobre sus
camadas.

CAPITULO TERCERO
PROPUESTA DE SOLUCION PARA AUTOMATIZACION

CAPITULO TERCERO: PROPUESTA DE SOLUCION PARA AUTOMATIZACION 7
3.1 DESARROLLO DE NUESTRO PROYECTO
Para la interpretación más acotada conviene describir y graficar los sensores
requeridos para nuestro proyecto.
En la actualidad las maniobras de varada y desvarada se realizan en forma manual
y con el apoyo de los buzos, los cuales son los encargados de posicionar las naves en sus
camadas y de esta forma emergen a la superficie y van dando indicaciones de cómo
mover los winches mecánicos para posicionar correctamente la nave.
La propuesta para el desarrollo del proyecto de automatización y control se base
en la instalación de 4 sensores del tipo interlock acondicionados para ambiente
submarino y bajas temperaturas cuyas características se detallan en APENCICE D, los
que se instalarán en las camadas de las naves. También se requieren sensores
fotoeléctricos tipo láser, que de igual forma estén acondicionado para ambientes salinos y
bajas temperaturas cuyas características se detalla en el APENDICE D, el que se instalará
su parte emisora en la pasarela del carro de varada y su parte receptora en la posición
central de la nave que se apresta a subir a varadero. Según Fig. 3.1 se grafican los
puntos que deseamos censar.
FIG.: 3.1 SENSORES DE POSICION

CAPITULO TERCERO: PROPUESTA DE SOLUCION PARA AUTOMATIZACION 8
Continuando con el planteamiento antes señalado, dichos sensores se dispondrán
sobre las camadas (bases de madera) en donde se posa la nave cuando deja de flotar al
momento que se traslada hacia tierra y también en un costado de la pasarela sobre la
cual transitan los trabajadores que realizan las maniobras. La disposición de los sensores
se muestra en las Figuras 3.2 y 3.3
FIG.: 3.2 DISPOSICION DE SENSORES
FIG.: 3.3 POSICION SWITCH DE POPA

CAPITULO TERCERO: PROPUESTA DE SOLUCION PARA AUTOMATIZACION 9
También falta indicar los sensores que se utilizan al costado de las embarcaciones
y los que se disponen en proa ,Fig. 3.4.
Por otra parte, se cuenta con una señal analógica de un anemómetro, la que nos
indica la velocidad y dirección del viento. Esta y todas las otras señales eléctricas
provenientes de los sensores serán transportadas hacia tierra por medio de un cable
multiconductor submarino apantallado de 9 x 22 AWG que se ira enrollando en un carrete
dispuesto en el costado derecho carro como se aprecia en la Fig. 3.5
FIG.3.4 POSICION SWITCH COSTADO BABOR
FIG.3.5 UBICACION DEL CARRETE

CAPITULO TERCERO: PROPUESTA DE SOLUCION PARA AUTOMATIZACION 10
3.2 PANEL FRONTAL DE MONITOREO
Fig. 3.6 PANEL DE MONITOREO
Para la recopilación de la información de sensores de campo se utiliza el software
LabView del cual se detallan sus bondades y aplicaciones en el APENDICE E. Como es
conocido este software es muy amigable y de fácil programación, por tal motivo que no se
profundizara mayormente en este tema y se adhiere como una herramienta de apoyo al
proyecto.
Para tener una idea general de cómo será el panel de control, en la figura 3.6 se
aprecian los sensores que irán dispuestos en las camadas (proa, popa, babor y estribor),
como también el sensor de posición, por otra parte contaremos con instrumentos virtuales
con los cuales controlaremos las señales de velocidad y dirección del viento y la distancia
de nuestro carro cuando este se introduce en el mar y por último parámetros de corriente
que consume el motor eléctrico del carro de varada y presión de aire en el circuito
principal para la operación de nuestros winches neumáticos.

CAPITULO TERCERO: GENERALIDADES DEL SOFTWARE LABVIEW 11
3.3 TARJETA ADQUISICION DE DATOS PCI 6025 E
A continuación en la Fig. 3.7 se muestra un diagrama en bloque de la PCI 6025E
FIG. 3.7 DIAGRAMA EN BLOQUE PCI 6025E
Por otra parte también es importante mencionar que dichas placas en las entradas
tienen un aporte bipolar que cambia de acuerdo a la ganancia seleccionada. Cada canal
puede ser programado con una ganancia única 0.5, 1.0, 10, 100 según Fig. 3.8
FIG. 3.8 CUADRO DE GANANCIAS

CAPITULO TERCERO: PROPUESTA DE SOLUCION PARA AUTOMATIZACION 12
En la Fig. 3.9 se muestran los pines de conexión para la PCI 6025 E.
FIG. 3.9 REGLETA DE CONEXION

CAPITULO CUARTO
GENERALIDADES DEL PLC MODICON E 984-265

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 13
4.1 BREVE DESCRIPCION DE LOS MODULOS PLC E984-265
Una de las claves del éxito de los autómatas programables frente a los equipos de
relés o incluso frente a los equipos construidos a base de circuitos integrados, ha sido la
posibilidad de realizar funciones muy diversas con un mismo equipo y cambiando
únicamente un programa.
De acuerdo a este criterio, los sistemas de control se clasifican en dos grupos:
sistemas cableados y sistemas programables. Los primeros realizan una función de
control fija, que depende de los componentes que la forman y de la forma que se han
interconectado. Por lo tanto, la única forma de alterar la función de control es modificando
sus componentes o la forma de interconectarlos. Los sistemas programables, en cambio,
pueden realizar distintas funciones de control sin alterar su configuración física, sino sólo
cambiando el programa de control.
Dentro de la clasificación de sistema de control, el PLC pertenece a la familia de los
Autómatas Programables Industriales (API). Desde el punto de vista de su papel en el
sistema de control, el autómata programable es la unidad de control, incluyendo total o
parcialmente las interfaces con la señal del sistema. Por otro parte, se trata de un sistema
con hardware estándar, con capacidad de conexión directa a las señales de campo
(niveles de tensión y corrientes industriales, transductores y periféricos electrónicos) y
programables por el usuario.
Al conjunto de señales de consigna y de realimentación que entran en un autómata
se le denomina genéricamente entradas y al conjunto de señales de control obtenidas,
salidas, pudiendo ser ambas analógicas o digitales. El concepto de hardware estándar
que se ha indicado para el autómata se complementa con el de modalidad, entendiendo
como tal el hecho de que este hardware está fragmentado en partes interconexionables
que permiten configurar un sistema a la medida de las necesidades. El funcionamiento del
PLC depende de la información y el estado de sus entradas. El usuario ingresa un
programa (generalmente vía software) y se obtienen los resultados esperados que son las
salidas.

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 14
4.2 CARACTERISTICAS CONTROLADOR E984
4.2.1 EL CONTROLADOR E 984
Los controladores programables Modicon Compact brindan un alto desempeño,
flexibilidad de aplicación y compatibilidad con otros sistemas de control mediante su oferta
de protocolos. Como otros controladores en la familia 984, los Compact implementan un
set común de instrucciones para desarrollar una lógica de usuario además de la
capacidad de comunicación mediante modbus estándar y opcional Modbus Plus.
Los controladores Compact comparten la siguiente estructura de procesamiento con
todos los otros controladores de la familia 984. Fig., 4.1
• Una sección que almacena la lógica del usuario, RAM de estado (SRAM).
• Una sección de CPU que resuelve el programa de la lógica de usuario basado en
los valores de corrientes de entrada en SRAM y que a su vez actualiza los valores
de salida.
• Una sección de procesamiento I/O que dirige el flujo de señales desde los
módulos de entrada a la SRAM y provee una ruta sobre las cuales las señales de
salida son resueltas a nivel de lógica en la CPU y son enviados a los módulos de
salida.
• Una sección de comunicaciones que entrega uno o más puertos de interfaces.
Estas interfaces permiten al controlador comunicarse con paneles programables,
computadores anfitriones, herramientas de diagnóstico y otros dispositivos
maestros, así como con controladores adicionales y otros nodos en una red
Modbus o Modbus Plus.
Esta consistencia en la arquitectura permite a los controladores Compact tener
compatibilidad con otros controladores de la familia. Esto válida que las secuencias de
lógica de usuario creadas en controladores de mediano y alto desempeño, tales como

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 15
el 984 B o él 985-685 sea relocalizado en un Compact y que la lógica de usuario creada
para un controlador pequeño sea compatible con la de un controlador más
depurado. Esto también significa que un Compact puede ser fácilmente integrado en una
red de multicontroladores.
El Modicon Compact, es un producto que permite la integración de sistemas
pequeños dentro de un entorno global de la industria, siendo usado como estación de
control propiamente tal o como RTU para sistemas que requieran la integración de “islas”
mediante enlaces de telemetría.
FIG. 4.1 ARQUITECTURA DEL CONTROLADOR 984

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 16
4.2.2 PRINCIPIO DE FUNCIONAMIENTO
Cada sistema de control 984 consiste de un PLC relacionando módulos de entrada y
salida. Estos módulos de E/S están conectados a sensores de campo y dispositivos del
interruptor etc., relacionados directamente a la aplicación en curso.
Los módulos de entrada aceptan señales eléctricas, por ejemplo de dispositivos
sensores de campo, y las convierten en niveles aceptables de tensión para el
procesamiento en la CPU. Los módulos de salida reciben señales eléctricas desde la CPU
y las convierten en niveles de tensión o corriente necesarias para activar dispositivos
electrónicos. Fig. 4.2
La unidad central de procesamiento del 984 resuelve la lógica de usuario muy
rápidamente, a intervalos regulares, haciendo al control predictible. La lógica determina
las acciones a seguir, basado en la recepción de datos desde los módulos de entrada. Los
cambios resultantes en los estados de la salida son enviados a terreno.
FIG. 4.2: SECUENCIA DE EVENTOS PARA CONTROLADOR 984
ENTRADA AL PROCESADOR
MODULO DE ENTRADA
COMUNICACIÓN AL PROCESADOR
MODULO DE SALIDA
SALIDA DEL PROCESADOR
CONTROLADOR
PROCESO BAJO CONTROL

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 17
4.2.3 MEMORIA Y PROGRAMACION DEL SISTEMA
Toda la memoria de la familia 984 está basada en la tecnología CMOS con backup
de batería para mantener integridad durante la pérdida de energía eléctrica. Un interruptor
de protección de memoria previene de alteraciones no autorizadas del programa del
usuario. Baterías de Litio de larga duración soportan toda la memoria por más de un año
en caso de pérdida de energía.
Un sistema 984 tiene dos tipos de memoria: una del tipo de memoria permanente o
ejecutiva y otra del tipo de memoria lógica del usuario. La memoria permanente o
ejecutiva reside en la memoria no-volátil. La lógica de usuario, la configuración de datos y
el estado (status) del sistema de datos residen en la RAM volátil respaldada por baterías.
Se usa la configuración de datos para definir el nivel de grabado inicial del sistema, reside
en una tabla de datos.
El estado de entradas y salidas se almacena en la RAM de estado (status RAM).
Esta representación del estado de las corrientes eléctricas, por ejemplo, los dispositivos
de entrada y salida (I/O), es actualizada cada vez que el PLC escanea la lógica del
usuario. Fig., 4.3
Todos los PLC de la familia 984 pueden ser programados con lógica escalera: una
simple, intuitiva y gráfica técnica de programación. Modicon adhiere más funcionalidades
a su programa en la forma de bloques de función especiales. Estos bloques toman parte
en muchas de las rutinas complejas de programación requerida para una aplicación,
incluida las operaciones aritméticas, de transferencia de datos, matriciales de lógica
booleana, etc.

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 18
FIG. 4.3: MEMORIA DEL SISTEMA
4.2.4 SISTEMA DE ENTRADA Y SALIDA I/O
La lógica de la aplicación que es almacenada y resuelta por el PLC es implementada
hacia la planta por los módulos de entrada y salida. Estos módulos de I/O están cableados
hacia sensores u otros dispositivos electrónicos y enlazados al PLC mediante un bus I/O
para crear un sistema de control total.
Los subsistemas I/O pueden ser localizados junto con o en proximidad del PLC,
localizados a distancias de 4.5 Km. del PLC, dependiendo del tipo de cable. Las
comunicaciones remotas se efectúan a través de una interfaz I/O remota para cada
locación I/O.
Suministro de poder
Procesador
Memoria ejecutable
Memoria de uso
Unidad procesadora ppal.
Estados de memoria I/O
Información desde y hacia vías e interfaces
Información desde el módulo de entrada
Información a módulos de salida

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 19
4.2.5 COMUNICACIONES
Los dispositivos periféricos, tales como paneles de programación o computadores
anfitriones, se conectan directamente a un PLC 984 a través de los puertos Modbus,
estandarizados en cada 984.
Modbus es un protocolo basado en comunicaciones RS 232 usado para adquisición
de datos, edición de programas y operación de archivos.
Muchos 984 incluyen puertos de comunicación a Modbus Plus. Modbus Plus utiliza
tecnología puerto – puerto en la cual un controlador puede iniciar transiciones con
otros controladores, esto es, un controlador puede actuar como esclavo o como maestro
en transacciones separadas. Múltiples rutas internas son frecuentemente provistas para
permitir procesamiento concurrente de transacciones de maestros y esclavos. La red
Modbus Plus puede alcanzar una velocidad de 1 Mbit/s. Además soporta aplicaciones de
datos y operaciones de aplicaciones. Muchos PLC de la familia tienen puertos para
soportar comunicaciones ASII.

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 20
4.2.6 CONFIGURACION DEL PROYECTO
Para simular el funcionamiento del sistema, confeccionaremos una consola con 4
pulsadores de dos posiciones con retorno central los que mediante el PLC Modicon
controlarán las 4 electroválvulas de sus respectivos winches neumáticos, los cuales serán
instalados en el carro de varada para posicionar las naves en su interior. La importancia
que reviste el uso del PLC está reflejada en una condicionante que será introducida en la
configuración del PLC y tiene relación de que los winches podrán actuar en forma
individual o ambos de una banda en forma simultánea, pero nunca se podrán accionar de
manera que las fuerzas de cada banda se contrapongan. Como se observa el diagrama
de la Fig. 4.4 el winche 1 y 3 son los de la banda de estribor y los winches 2 y 4 los de la
banda de babor. Por tal motivo para situar la nave al interior del carro se podrán usar los 4
winches en forma simultanea e independientes entre sí o los winches de una banda ya
sea 1 y 3 ó 2 y 4, pero nunca podrán ser accionados a la vez los winches 1 y 2 ó 2 y 4
para así evitar que las fuerzas se contrapongan y eliminar un eventual riesgo para los
operadores que se encuentran a bordo del carro.
FIG. 4.4 ESQUEMA DE FUNCIONAMIENTO WINCHES NEUMATICOS

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 21
Para comprender el funcionamiento del sistema, definimos los pulsadores de
acuerdo a la posición de los winches en el carro de varada y para su accionamiento los
pulsadores se designaron como: 1Eb; 1Bb, 2Eb; 2Bb, 3Eb; 3Bb y 4Eb:4Bb esto debido a
que los winches giran en ambos sentidos de acuerdo al requerimiento de ubicación de la
nave.
Por ejemplo, una vez que la nave está dentro del carro, y se desea mover hacia la
izquierda debemos accionar los pulsadores 2Eb y 4Eb para entregar espías y 1Eb y 3Eb
para moverlo hacia la izquierda del operador lo que representa hacia estribor de la nave.
También podemos desplazarlo hacia la derecha del operador lo que significa moverlo a
babor de la nave para lo cual debemos de accionar los pulsadores 1Bb y 3Bb para
entregar espías y 2Bb y 4Bb para moverlo hacia la derecha del operador.
Otra maniobra que se puede realizar es que la nave se mueva en torno a su eje,
con lo cual la proa de la nave se logra desplazar hacia la derecha y la popa hacia la
izquierda o viceversa. Para poder realizar este movimiento se deben de accionar los
pulsadores 1Eb y 4Bb para girar la proa de la nave hacia la izquierda del operador y la
popa hacia la derecha del operador y en forma simultánea se deben de accionar los
pulsadores 2Eb y 3Bb para entregar espías.
Lo importante es que nunca se contrapongan las fuerzas ejercidas por los winches
1 y 2 ó 3 y 4 y si por error del operador se accionaran los pulsadores 1Eb y 2Bb o 3Eb y
4Bb el PLC inhabilita esta acción de acuerdo a la programación realizada y de esta forma
evitamos riesgos a personal y materiales.
Los pulsadores para relacionarlos con la programación interna del PLC se
designaron de la siguiente forma:
1Eb. = Uno_Izq. 3Eb.= Tres_Izq.
1Bb. = Uno_Der. 3Bb. = Tres_Der.
2Eb. = Dos_Izq. 4Eb. = Cuatro_Izq.
2Bb = Dos_Der. 4Bb. = Cuatro_Der.

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 22
4.2.7 DIAGRAMA ESCALERA
A continuación se efectuará la programación y configuración del PLC Modicon para
el uso de nuestro proyecto.
FIG. 4.5 DIAGRAMA ESCALERA
Debemos considerar antes de cualquier programación cuales serán las
restricciones que tendrá nuestro programa. En la Fig. 4.5 se representa el diagrama y
como el objetivo es controlar 4 electroválvulas que comanden 4 winches neumáticos. Lo
primero es dar la libertad de operación en forma independiente a cada uno o en forma
cruzada, pero nunca se podrán operar los winches en oposición, esto quiere decir, que si
por algún motivo el operador se equivoco en la manipulación y por error activó los winches
de tal forma que las fuerzas se opongan, el PLC inhabilita esta acción y por ende se
protege de que las espías se corten por ejercer fuerzas en sentido opuesto.
Nuestro diagrama además cuenta con 2 comparadores 1.13 y 1.31 los cuales
dentro de su lógica ven que si se pulsan simultáneamente (1Bb.) el cual está designado
en la programación del PLC como Uno_Izq. y (2Eb.) el cual está designado en la
programación del PLC como Dos_Der. o Tres_Izq. y Cuatro_Der. estos para la lógica de
programación del PLC significa = 1 y se activan las restricción 1 y 2 de los comparadores
1.13 y 1.31 las cuales abren los contactos N/C e interrumpen el circuito hacia las electro
válvulas que en este caso están representadas por 4 motores eléctricos.

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 23
4.3 LABORATORIO
4.3.1 IMPLEMENTACION EN LABORATORIO.
PLC
MODULOS DE ENTRADA Y SALIDA
CONSOLA FUENTES DE PODER MOTORES
FIG. 4.6 IMPLEMENTACION EN LABORATORIO
En laboratorio se dispuso del PLC Modicon con sus módulos de entrada y salidas
discretas, para lo cual usamos una consola de comandos 2 fuentes de poder de 24VDC
y 5 VDC y una maqueta que representa el carro de varada con sus 4 Winches
neumáticos. El principio de funcionamiento es “PODER CONTROLAR” los 4 winches
neumáticos del carro para poder acomodar a las naves al interior del mismo que se
disponen a subir a varadero y mediante el uso del PLC, haciendo uso de sus bondades se
introducirán las restricciones necesarias a su programación objeto poder realizar estas
maniobras.

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 24
4.3.2 PLC MODICON Y MODULOS
FIG. 4.7 PLC Y MODULOS
Podemos apreciar el PLC Modicon en el Nº 1 alimentado con 24 V desde una
fuente al costado derecho que transforma 220 V a los 24 VDC requeridos por el PLC. Los
zócalos en donde se disponen los módulos y el PLC están definidos por Software. El PLC
está en la posición 1-1, la fuente de poder en la posición 1-2, las posiciones 1-3 y 1-4
están disponibles, la posición 1-5 sirve de conexión hacia los módulos de entradas y
salidas discretas y analógicas. La posición 2-1 está el modulo DEP 208, las posición 2-2 y
2-3 están ocupadas por los módulos de entradas y salidas analógicas DAU 202 y ADU
205, en la posición 2-4 está el módulo de salida DAP 208 y la posición 2-5 está disponible.
31
21

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 25
4.3.3 MODULOS DE ENTRADA Y SALIDA
FIG. 4.8 CONEXION DE MODULOS
El módulo DEP 208 tiene la capacidad de recibir hasta 8 entradas binarias y detecta
señales de los dispositivos de detección de campo como ser botones pulsadores
conmutadores y que para nuestro caso provienen de los pulsadores 1,2,3 y 4 de la
consola de mando que representa los movimientos de los motores eléctricos en sentido
horario y en sentido antihorario. Este módulo esta alimentado con señales 220 VAC. Y las
señales de campo también con 220 VAC.
Los led dispuestos en oposición a cada entrada nos indican el correcto
funcionamiento de los dispositivos de campo.
El módulo de salida discreta ADU 208 es un dispositivo que cuenta con 8 salidas de
relé y utiliza una fuente externa para poder activar dichos relés y también cuenta con leds
indicadores a las salidas de relé para verificar su correcto funcionamiento.

CAPITULO CUARTO: GENERALIDADES PLC MODICON E984-265 26
4.3.4 CONSOLA DE MANDOS
FIG. 4.9 CONSOLA DE MANDO
En esta consola, Fig. 4.9, se disponen los pulsadores de control a distancia de los
motores eléctricos que para este caso y de acuerdo a la actividad desarrollada en el
astillero se identificaron como motor 1 BB y EB, motor 2 BB y EB, motor 3 BB y EB y
motor 4 BB y EB. Esto debido a que una vez en el interior del carro la nave se debe
desplazar hacia las bandas, de acuerdo a esto es que se disponen de los términos
náuticos de babor y estribor. Esta consola esta alimentada con 220 VAC. para los
pulsadores de control y de 8 relés de 24 VDC que son los encargados de alimentar los
motores eléctricos dispuestos en el carro de varada. Que para efecto de demostración en
el laboratorio utilizamos motores eléctricos en miniaturas de 5 VDC.
Estos motores en miniatura representan los winches neumáticos del carro de
varada y como mencionamos que estos winches pueden girar en ambos sentidos son los
pulsadores los que le dan estos movimientos. 1Eb hacia la izquierda, 1Bb hacia la
derecha, el mismo caso para todos los pulsadores y las combinaciones son diversas
exceptuando las restricciones antes mencionadas.

CAPITULO QUINTO
DESCRIPCION GENERAL DEL PROGRAMA CONCEPT
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 27

5.1 INTRODUCCION
Concept es un set de herramientas de programación bajo tecnología Microsoft-
Windows que entrega un ambiente de desarrollo singular para todos los programas en el
sistema a controlar. Usando editores familiares estandarizados reunidos en una sola
aplicación, se puede crear, integrar y mantener programas para controladores lógicamente
programables, comunicaciones y diagnósticos con la misma base de datos. La idea
esencial de Concept es simplificar el software de control. Provee a las familias Modicon,
Telemecanique, Momentum, Compact, Atrium y Quantum de aplicaciones a velocidades
más rápidas.
En los años recientes, los costos del hardware ha disminuido drásticamente, mientras
que el software ha llegado a ser una de las partes más caras de los sistemas de control. Y
eso se debe al motivo de requerir mucho tiempo para desarrollar, documentar, mantener y
expandir los sistemas de software. Concept está ligado a estándares Microsoft Windows
Gráfico usando interfase (GUI) y a estándar internacional IEC 1131 para controladores
lógicamente programable, haciendo sus aplicaciones comunes a los usuarios y simples de
utilizar. Concept alcanzó un nivel de certificación más alto en Abril de 1998 al incluir lista
de instrucciones (instrucción list) y texto estructurado (ST). Concept simplifica el estado
del programa con funciones que permiten descubrir errores e identificar variables sin uso.
Funcionalidad adicional incluye una estructura jerárquica para Concept que simplifica
programas complejos y otorga supervisión “fácil de leer “al usuario. También se puede
enriquecer la parte gráfica con textos, algo que reduce los errores y hace a los programas
fácilmente legibles. Por ejemplo, cuando se conecta una función de bloques, el editor
automáticamente chequea que las entradas y salidas sean adecuadas y que la conexión
es válida.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 28

Concept posee un simulador que permite ejecutar el programa IEC y chequear los
errores, además de herramientas de diagnóstico como libro de datos de errores que
automáticamente detecta el error y apunta al área del problema. También posee
documentación de errores y un mapeo para encontrar la solución. Como datos
adicionales, se puede decir que posee ayuda en línea (On- line Help), que posee
extensible documentación imprimible y además provee un poderoso monitoreo en línea
que incluye a Power Flow para diagramas en escalera, Activity Flow para carta de
funciones secuenciales (SFC) y data flow para funciones en diagramas de bloques, textos
estructurados y lista de instrucciones.
Concept permite a los usuarios importar o exportar programas del tipo estructurado
o lista de instrucciones ASCII bajo estándar IEC 1131, siendo capaz ,mientras se ejecuta
la importación, de renombrar símbolos, bloques de funciones y secciones. El sistema
supervisor tiene la facultad de asignar múltiples niveles de seguridad con clave
(passwords) y reduce la alternativa para cambios no autorizados a las aplicaciones. Los
rótulos para cada elemento de programación (tagnames) pueden ser directamente
accesados por la herramienta de la industria. Esta herramienta provee el acceso directo a
la base de datos para todo tipo de datos de Concept (localizable o no, elementales o
estructurados). Así se pueden escribir datos de control mediante los soportes de
aplicación de software OLE/OPC (base de datos, aplicaciones de Visual Basic etc.) y las
aplicaciones de clientes en OPC (HMI, SCADA, MES, ERP…)
La reutilización es lo poderoso de Concept. Cuando una función o un bloque de
funciones son diseñados y probados pueden ser utilizadas en otras aplicaciones en el
futuro como un bloque ya construido.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 29

5.2 PROGRAMACION DE NUESTRO PROYECTO
FIG.5.1 SELECION DEL PLC
Lo primero que debemos realizar es seleccionar nuestro PLC y que para este caso
es el PLC Compact PC- E 984-265. Este es el primer paso de la programación y los datos
vienen dados por fabricante y están impresos en un costado del PLC. El La Fig. 5.1 se
muestra la pantalla que aparece al inicio de la programación y si seleccionamos la
ventana de “Selección del PLC” , nos aparece la segunda pantalla Selección del PLC en
donde definimos nuestro tipo a usar.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 30

5.2.1 ASIGNACION DE E/S
FIG. 5.2 ASIGNACION DE ENTRADAS Y SALIDAS
En este cuadro definiremos las entradas y salidas de nuestras variables. En el
menú principal aparece una ventana que se identifica como “Asignación de E/S”, al
seleccionar esta ventana se abre una segunda pantalla que dice “Asignación de E/S” y en
la ventana de edición se entra para la configuración correspondiente. Fig. 5.2 muestra la
secuencia de estas pantallas.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 31
5.2.1 ASIGNACION DE POSICION DE MODULOS

FIG. 5.3 ASIGNACION DE POSICION DE MODULOS
Podemos apreciar que el PLC dispone de bastantes ranuras de expansión las
cuales están limitadas de acuerdo al tipo de PLC. Para nuestro caso utilizaremos las
posiciones 1-1 para el PLC, la posición 1-2 para la Fuente de poder, la posición 2-1 para
el módulo DEP 208 y la posición 2-4 para el módulo DAP 208. En la Fig. 5.3 podemos
apreciar la nomenclatura de los dispositivos instalados en sus respectivas posiciones
como también el tipo de entrada y salida.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 32
5.2.3 EDITOR DE VARIABLES

FIG. 5.4 EDITOR DE VARIABLES
Para este caso definimos las señales de los pulsadores como Uno_Izq. O Uno_
Der. Y los motores de las misma forma Motor 1_Der. Motor 2_Izq. En la Fig. 5.4 también
se puede apreciar el tipo de dato y su dirección asociada
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 33
5.3 IMPLEMENTACION EN LABORATORIO
5.3.1 CONEXION DEL PROGRAMA AL PLC

FIG. 5.5 CONEXION DEL PROGRAMA AL PLC
En la Fig. 5.5. Las líneas verdes representan el poder presente en los circuitos y
las líneas rojas representan a los circuitos que están listos para ser accionados por el
operador.
FIG. 5.6 CONEXION DEL PROGRAMA AL PLC
En esta secuencia se puede apreciar que se ha activado el pulsador Uno_Izq. quien
a su vez energizó el Motor1_Izq. haciendo girar el winche en sentido antihorario.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 34

FIG. 5.7 CONEXION DEL PROGRAMA AL PLC
En la Fig. 5.6. Se ha activado Uno_Der. Y se ha energizado Motor1_Der.
haciéndolo girar en sentido horario.
FIG. 5.8 CONEXION DEL PROGRAMA AL PLC
En esta secuencia se puede apreciar que se ha activado el pulsador Dos_Izq. quien
a su vez energizo el Motor2_Izq., haciendo girar el winche en sentido antiohorario.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 35

FIG. 5.9 CONEXION DEL PROGRAMA AL PLC
En la Fig. 5.9 Podemos apreciar otra acción ejecutada por el operado en la cual
acciona los cuatro pulsadores 1,2,3 y 4 a la vez lo cual no representa ningún peligro pues
en estas condiciones los winches estarían entregando espías y eso no reviste mayor
problema.
FIG. 5.10 CONEXIÓN DEL PROGRAMA AL PLC
En esta secuencia se puede apreciar que se ha activado el pulsador Dos_Izq. quien
a su vez energizo el Motor2_Izq. haciendo girar el winche en sentido antihorario. Y el
pulsador Cuatro_Izq. quien hace mover al Motor4_Izq. Y nos podemos dar cuenta que
también se pueden utilizar en forma diagonal o sea winches 1 y 4 como winches 2 y 3.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 36

FIG. 5.11 CONEXION DEL PROGRAMA AL PLC
En la Fig. 5.11 Podemos apreciar nuestra primera restricción, pues como se
mencionó los winches pueden operar en forma independiente y simultánea siempre y
cuando las fuerzas ejercidas por los mismos no se opongan, lo cual podría provocar serios
daños a personas y materiales. Por lo tanto cuando se acciona por error los pulsadores
Uno_Izq. y Dos_Der. Lo que haría que los winches operaran en sentidos contrarios, es
que se acciona la restricción 1 la cual es activada por el comparador 1.13 el cual a su vez
activa la bobina del contacto normalmente cerrado y lo habré de tal forma de interrumpir el
paso de energía hacia Motor1_Izq. y Motor2_Der.
CAPITULO QUINTO: DESCRIPCION GENERAL DEL PROGRAMA CONCEPT 37

FIG. 5.12 CONEXION DEL PROGRAMA AL PLC
En la Fig. 5.12 se puede apreciar la segunda restricción tal como en la anterior
en donde se menciona los problemas que tendría al accionar estos en sentido opuesto es
que al activarse los pulsadores Tres_Izq. y Cuatro_Der. Se activarían las restricciones 2
accionadas por el comparador 1.31 el cual a su vez activa la bobina del contacto
normalmente cerrado y lo habré de tal forma de interrumpir el paso de energía hacia
Motor3_Izq. y Motor4_Der.

CAPITULO SEXTO
IMPLEMENTACION GENERAL
CAPITULO SEXTO: IMPLEMENTACION GENERAL 38
6.1 CONSOLAS DE OPERACION GENERAL

Para poder complementar de mejor forma nuestro proyecto, es que se ha decidido
la incorporación de winches neumáticos para mejorar las maniobras al interior del carro
de varada. Dichos winches serán controlados por electroválvulas, las cuales serán
comandadas y controladas a distancia por el PLC Modicon. Como se describió en el
capítulo cuarto.
En la estación del pilar box , que en la actualidad es la sala de control del winche
principal del carro de varada se implementará una sala de control en donde se instalarán
nuestros monitores uno con el software LabVIEW y el otro con la señal de VHF
proveniente de la cámara de video instalada en el carro, además una consola de control
para las electroválvulas de los winches neumáticos, Fig. 6.1. El objetivo de estos winches
será posicionar a la nave dentro del carro de varada lo más próximo a su posición final,
para así posteriormente en dicha posición afirmarlo al carro a través de las espías e ir
subiéndolo lentamente hasta que se pose sobre sus camadas.
También como los winches se controlarán por un operador que se encuentra
situado en la sala de control (pilar box), la cual estará distante del desarrollo de la
maniobra, y es aquí en donde se instalará un monitor de TV con una señal de VHF, la cual
transmitirá en directo a través de una cámara vía cable RG 59 la maniobra en tiempo real
y así dicho operador podrá ver en todo momento el desarrollo de la maniobra e ir
observando en su monitor los movimientos que ejecutan los winches que él está
comandando. La cámara será instalada en el carro, de forma tal, que se puedan apreciar
a ambos costados.
Nuestra consola cuenta con 4 pulsadores de dos posiciones con retorno central ,
los cuales le darán las señales al PLC para que este a su vez controle las electroválvulas
de cada winche y así de esta forma poder operar recogiendo o entregando a las espías
que afirman la nave, según las instrucciones impartidas por el jefe de maniobras. Para
este efecto los operadores de esta consola deberán estar permanentemente comunicados
con el jefe de maniobras mediante equipos VHF.
CAPITULO SEXTO: IMPLEMENTACION GENERAL 39
6.2 SALA DE CONTROL

CONSOLA DE WINCHES MONITOR CARRO MONITOR LABVIEW
Fig. 6.1 CONSOLA DE MONITOREO CONTROL Y VIGILANCIA
La figura 6.1 muestra como quedará la sala de control en el pilar box. Se tendrá la
consola de mando de los winches neumáticos compuesta por los 4 pulsadores, también
un monitor que será el encargado de reproducir las filmaciones de las maniobras de
varada y desvarada de naves para que el operador pueda apreciar y acomodar
correctamente la nave al interior del carro y por último un según monitor en el cual estará
representado el software LabVIEW y mediante este software se recopilará la información
provenientes de los dispositivos de campo. Como ser la de los sensores de
posicionamiento, sensores de contacto, las señales del anemómetro, las señales
intensidad de corriente del motor del winche principal y sensor de presión de aire del
circuito principal.
PLC CAMARA DAQ
WINCHE

CAPITULO SEXTO: IMPLEMENTACION GENERAL 40
6.3 MODO DE OPERACION
Lo fundamental es poder comprender y retomar la idea inicial del proyecto, el cual,
en su génesis plantea ser un sistema de apoyo a las maniobras que se ejecutan en las
labores de varada y desvarada, por lo cual en nuestra sala de control se tendrán dos
monitores, uno que envía una señal de VHF de una filmación en vivo y que representa las
actividades de varada y el otro monitor registrará los sensores que tenemos en el campo
mediante el software LabVIEW. Por último se cuenta con un panel de pulsadores, los que
controlan las electroválvulas de los winches neumáticos a través del PLC Modicon.
Por lo tanto, al iniciarse una maniobra de varada se constituye el operador, el cual,
verificará que todos los dispositivos y sensores estén funcionando adecuadamente para
dar inicio a la maniobra. Se determinará la profundidad a la cual se deberá bajar el carro,
de acuerdo al desplazamiento de la nave que será llevada a varadero y teniendo en
cuenta las condiciones de tiempo reinante y verificando los consumos de corriente y
presión de aire en el circuito.
Al entrar la nave al interior del carro y cuando el sensor de posicionamiento lo
indique, la nave será detenida y afirmada al carro, ahora en este paso entra la operación
de los winches neumáticos, para lo cual, el operador deberá de observar su monitor
permanentemente e ir acomodando la nave al interior del carro, para luego subir éste y
confirmar que los interruptores de presión en las camadas comiencen a encenderse, con
lo cual le indicarán que la nave ya se encuentra posada sobre sus camadas y podrá seguir
subiendo el carro con mayor seguridad.

CAPITULO SEPTIMO
EVALUACION ECONOMICA

CAPITULO SEPTIMO: EVALUACION ECONOMICA 41
7.1 INTRODUCCION
Para poder realizar una evaluación lo más acertada posible es que se considerarán
varios factores en la línea de producción y sus procesos asociados, de forma tal de incluir
en ellos índices de optimización de recursos en el ámbito de materiales y horas hombre
(HH), por otra parte, también se deben de considerar los aspectos de seguridad y
modernización y el valor agregado que adquiere el astillero con esta implementación de
nueva tecnología. Estos costos de la nueva tecnología serán reflejados en la compra de
los siguientes implementos:
• PLC MODICON.
• SOFTWARE.
• TARJETA DE ADQUISICION DE DATOS.
• PC.
• SENSORES.
• ANEMOMETRO.
• WINCHES NEUMATICOS.
• CABLE MULTICONDUCTOR.
• CONSOLA Y MICELANEOS.
• CAMARA Y MONITOR DE TV.
• ELECTROVALVULAS.
• MANO DE OBRA.
• NOTA: SE CUENTA CON COMPUTADOR PARA CARGAR SOFTWARE
A continuación haremos un análisis financiero del costo que significa el subir una
nave de 2500 ton. de desplazamiento, para lo cual se considera el costo en horas
hombre(HH), materiales, gastos y consumos asociados.
El tiempo requerido para ejecutar dicha maniobra, si las condiciones
meteorológicas son normales, o sea mar plana y vientos de 4 a 12 nudos, es de

aproximadamente 3 horas con 40 minutos. Y si las condiciones no son tan favorables se
podría incrementar hasta 4 horas con 25 minutos.
CAPITULO SEPTIMO: EVALUACION ECONOMICA 42
7.2 CUADRO DE GASTOS.Centro de
costoCantidad
De HHServicios Materiales Apoyos
371Maniobras
184 Grúas y Horquilla Madera, clavos Remolcador Panga
320Ingeniería
24 Cálculos de
desplazamiento
Papel
200Producción
4 Control Gral.
370Mantención
24 Electricidad Petróleo
Total 236 216.000 350.450 175.250
FIG.7.1 CUADRO DE GASTOS
Para el cálculo final se debe de considerar las horas hombre (HH) empleadas en la
maniobra a un costo de $ 5.325 más la corrección económica que se realiza al término
de la tarea y de acuerdo al tiempo utilizado en dicha maniobra cuyo factor puede ser de
1.2 a 1.5 dependiendo del desplazamiento de la nave a subir, lo cual al final nos da una
suma equivalente y aproximada de $ 2.398.080.
Que se deduce de las 236 HH multiplicadas por $ 5.325 más los servicios
$216.000, materiales $ 350.450 y los apoyos $ 175.250 y el total multiplicado por el
mínimo factor de 1.2 por ser una nave menor.
Lo más trascendental de nuestro proyecto es poder incidir fuertemente en el
concepto de ahorro de horas hombre (HH) utilizadas en las maniobras, para lo cual
implementando este nuevo sistema de monitoreo reduciríamos entre un 15 a 20 % el
personal que participa en las maniobras y de esta forma poder sustentar la idea que entre
el mediano a largo plazo la modernización se logrará pagar por si sola ya que por varada
se considera un ahorro 45 horas hombre (HH) promedio a un costo de $ 5.325 tenemos
un ahorro neto de $ 239.625 eso al multiplicarlo por 2 nos da un monto de $ 479.250 que
representa una maniobra completa de varada y desvarada de una unidad de 2.500 Ton. Y
si promedio al año se realizan unas 11 varadas tendríamos un no menos despreciable
ahorro de $ 11.981.250 ante lo cual se podría plantear la viabilidad de nuestro proyecto,
pues este se lograría pagar al cabo de 3 años. Ya que al cuantificar todos los materiales

requeridos para nuestro proyecto más la mano de obra e insumos varios la suma total de
$ 31.341.024
CAPITULO SEPTIMO: EVALUACION ECONOMICA 43
7.3 PLC MODICON
Para el control de los winches neumáticos dispuestos en el carro de varada y cuyo
objetivo es posicionar a las naves al interior del carro es que utilizaremos el PLC Modicon
el cual tiene un costo de acuerdo a cotización Schneider Nº 90058822 que se adjunta en
APENDICE F de:
• PLC MODICON Y ACCESORIOS …………………$ 4.377.710 .-
Fig. 7.2 PLC MODICON

CAPITULO SEPTIMO: EVALUACION ECONOMICA 44
7.4 TARJETA DE ADQUISICION DE DATOS
Para el control de los diversos dispositivos que hemos dispuesto en el campo es
que mediante el software LabVIEW controlaremos estas señales y a través de la tarjeta de
adquisición de datos PCI 6025E que tiene un valor según cotización Nº ETT- CO
-1268_2007 que se adjunta en APENDICE F de:
• TARJETA DE ADQUISICION DE DATOS PCI 6025E …………………$ 1.263.024 .-
Fig. 7.3 TARJETA DE ADQUISICION DE DATOS

CAPITULO SEPTIMO: EVALUACION ECONOMICA 45
7.5 SENSOR DE POSICIONAMIENTO
Para la detección de la nave al interior del carro ocuparemos un sensor fotoeléctrico
con un reflector el que serviría de ayuda para indicar el momento exacto que la nave esté
en correcta posición Fig. 7.4. Dicho sensor tiene un costo de acuerdo a cotización RS Nº
FCG134151-48887 que se adjunta en APENDICE F de:
• SENSOR DE POSICIONAMIENTO…………………$ 286.650.-
Fig. 7.4 SENSOR DE POSICIONAMIENTO

CAPITULO SEPTIMO: EVALUACION ECONOMICA 46
7.6 SENSORES DE CONTACTO
También para poder detectar el instante en que la nave toca las camadas se
dispondrán de 4 interruptores del tipo interlock sellados y acondicionados para ambientes
acuáticos salinos Fig. 7.5 con un costo de acuerdo a cotización RS Nº FCG134151-48887
que se adjunta en APENDICE F de:
• 4 SENSORES DE PRESION………………..$ 319.824.-
Fig. 7.5 SWITCH DE CONTACTO

CAPITULO SEPTIMO: EVALUACION ECONOMICA
47
7.7 ANEMOMETRO
Para poder medir las condiciones imperantes de viento es que requerimos de un
instrumento que pueda realizar la lectura de intensidad y dirección del viento, por tal
motivo hemos seleccionado un anemómetro que cumple estas funciones Fig. 7.6 y 7.6.1
con un costo de acuerdo a cotización TRANSMARINE Nº E377/07 la que se adjunta en
APENDICE F de:
• ANEMÓMETRO………………………………. $ 880.900.-
Fig. 7.6 INDICADOR DE VELOCIDAD Fig. 7.7 TRANSDUCTOR

CAPITULO SEPTIMO: EVALUACION ECONOMICA
48
7.8 CAMARA DE VIGILANCIA
Para poder monitorear constantemente los movimientos de la nave al interior del
carro contaremos con un circuito de vigilancia, por medio de una cámara la que se
instalará en el carro y transmitirá en directo la maniobra, Fig. 7.7 y 7.7.1 dicho sistema
tiene un costo de acuerdo a cotización RS Nº FCG134267-48887 la que se adjunta en
APENDICE F de:
• SISTEMA DE VIGILANCIA…………………..$ 252.350 .-
Fig. 7.8 CAMARA DE VIGILANCIA

Fig. 7.9 MONITOR
CAPITULO SEPTIMO: EVALUACION ECONOMICA 49
7.9 CABLE MULTICONDUCTOR
Para poder transmitir todas nuestras señales provenientes desde el carro
utilizaremos 250 MT. de un multiconductor de características apropiadas a ambientes
salinos Fig. 7.8 con un costo de acuerdo a cotización RS Nº FCG134151-48887 la que se
adjunta en APENDICE F de:
• MULTIPAR 9 X 0.25MM……………………………..$ 821.766.-
Fig. 7.10 MULTICONDUCTOR

CAPITULO SEPTIMO: EVALUACION ECONOMICA
50
7.10 MOTOREDUCTOR
Para poder realizar los ajustes necesarios de posición de las naves al interior del
carro se requiere winches neumáticos controlados por medio de electro válvulas, para tal
efecto utilizaremos moto reductores Fig. 7.9 los que cumplirán la función de winches y
tienen un costo de acuerdo a cotización VIGNOLA Nº 163381 que se adjunta en
APENDICE F de:
• MOTOREDUCTOR GASP 3.2 HP…………………..$ 13.860.000 .-

Fig. 7.11 MOTOREDUCTOR
CAPITULO SEPTIMO: EVALUACION ECONOMICA
51
7.11 ELECTRO VALVULA
Para poder operar los motoreductores es necesarios contar con mecanismos de
corte y admisión de aire para lo cual se instalaran electroválvulas a cada motoreductor.
Fig. 7.10 con un costo de acuerdo a cotización VIGNOLA Nº 164541 que se adjunta en
APENDICE F de:
• ELECTRO VALVULA…………………..$ 1.918.800 .-

Fig. 7.12 ELECTROVALVULA
CAPITULO SEPTIMO: EVALUACION ECONOMICA
52
7.12 MANO DE OBRAPara la implementación del proyecto en cuestión se requiere contar con personal
del área eléctrica y neumática considerando que se necesita instalar PLC más software y
canalización del cable multiconductor hacia los distintos dispositivos de campo, como
también requerimos la instalación de los dispositivos sensores, además de la regulación y
montaje del los winches neumáticos. Esto considerando que se cuentan con todos los
implementos para realizar dicho montaje se considera un plazo de montaje y pruebas
finales de 25 días hábiles, para lo cual requerimos del siguiente personal.
• 1 Ingeniero de ejecución eléctrico.

• 2 Técnicos de nivel superior electricistas.
• 2 Técnicos de nivel superior en mecánica subespecialidad de neumática.
• 1 Técnico nivel medio soldador.
Ahora cuantificaremos las horas estimadas en la implementación del proyecto y
aplicaremos dichos valores a cada especialidad que interviene en la obra. Como se
considera trabajar desde las 08:00 hasta las 17:00 de lunes a viernes. Esto arroja un total
de 40 horas semanales y 120 horas el proyecto total.
Ingeniero eléctrico:
Presentación de planos creación del proyecto y supervisión de la obra. Lo cual lo hace
partícipe desde el inicio al final de la obra por lo tanto serán 120 horas y una hora de
Ingeniería cuesta $ 22.000 lo cual suma un total de $2.640.000 .-
Electricistas.
Participaran también durante toda la obra serán los encargados de canalizar el cable
multiconductor, además de instalar los distintos dispositivos de campo a medir como la
implementación de la consola y el software LabVIEW por lo tanto son 2 técnicos que
estarán 120 c/u durante el desarrollo de la obra. Y una hora de un técnico electricista
cuesta $ 14.000 por tal motivo los dos técnicos suman un valor de $ 3.360.000.
CAPITULO SEPTIMO: EVALUACION ECONOMICA
53
Mecánicos:En este caso sólo intervendrán en el último proceso y que implica el montaje de los
4 winches neumáticos y la regulación de los mismos, por tal motivo se considera una
semana laboral el tiempo que implica en desarrollo de esta actividad. Por tal motivo se
consideran 40 Hrs. por cada especialista en mecánica y cada hora de esta especialidad
tiene un valor de $ 13.750 lo cual suma un valor total de $ 550.000 y por dos
mecánicos $ 1.100.000.

Soldador:
Este especialista sólo será requerido para realizar apoyo del montaje de winches y
bases para sensores y dispositivos. Por tal motivo se considera un apoyo y para
cuantificarlo se le asignaron 20 Hrs. Y cada hora de esta especialidad tiene un valor de
$ 13.000, lo cual tiene un valor total de $ 260.000.
En resumen tenemos un costo de mano de obra total de: $ 7.360.000.-
Por lo tanto al realizar un balance general de los gastos que involucra el proyecto
tenemos lo siguiente:
• Costo en materiales …………………………….$ 23.981.024
• Costo de la mano de obra………………………$ 7.360.000
Costo Total de Proyecto………………………….$ 31.341.024

CAPITULO OCTAVO
CONCLUSIONES
CAP ITULO OCTAVO: CONCLUSIONES 54
En consideración de la tecnología actual en uso, nuestro astillero cuenta con un
sistema de control eléctrico que data de los años 80 y en el cual nunca se ha considerado
modernización alguna a su sistema, esto producto de su confiabilidad que ha demostrado
a lo largo de su vida útil, lo cual, no impide en poder realizar alguna mejora al proceso
que involucra el desarrollo de estas maniobras y de esta forma sin intervenir su actual
sistema de control poder incorporar un sistema de monitoreo que sirva de apoyo a las
maniobras de varada y desvaradas.

Por tal motivo y luego de un análisis financiero como se detalló en el capítulo
séptimo queda reflejada la viabilidad de poder ejecutar un proyecto de modernización de
estas características. Y demostrado el uso sencillo pero no menos importante del PLC
Modicon con su lógica de programación nos brinda un alto nivel de seguridad y confianza
al desarrollo de las maniobras. Al darle al PLC Modicon la importancia que reviste en
nuestro proyecto, queda reflejada que ante cualquier implementación de automatización o
la incorporación de nueva tecnología ante la necesidad visible y tangible de un problema
el uso de estos controladores lógicos programables PLC pueden ser de gran aporte desde
sus más simples funciones hasta las más complejas.
La cual considerando su futura prolongación vendrá a apoyar aun más la idea de
darle un mayor valor agregado a nuestro astillero.
Los sistemas de control y vigilancia en todo aspecto son siempre un factor de
ayuda para poder prevenir y proteger las vidas humanas y los bienes materiales. Todo
proceso, que se pueda decir contar con un sistema de monitoreo en línea, sin lugar a
dudas que el producto final de ese proceso se verá beneficiado al contar con un sistema
de monitoreo, control y vigilancia logrando con ello poder aumentar el nivel de producción
y otorgarle un mayor valor agregado al producto final y un reconocido prestigio para la
empresa.

CAPITULO NOVENO
REFERENCIAS BIBLIOGRAFICAS
CAPITULO NOVENO: REFERENCIAS BIBLIOGRÁFICAS
55
• ASMAR: SU CONTRIBUCIÓN A LA INDUSTRIA NAVAL EN CHILE Autor: Carlos MARTIN Fritz
www.asmar.cl
• NATIONAL INSTRUMENT. Manual de Uso DAQ PCI 623E-624E-625E
www.natinst.com

• TUTORIAL LABVIEW POR NATIONAL INSTRUMENT.
www.natinst.com
• CATALOGO RS 2006 - 2007.
www.rschile.cl
• Vignola S.A
www.vignola.cl
• CONTROL MULTIVARIABLE MEDIANTE REALIMENTACIÓN DE ESTADO USANDO PLC MODICON.
Autor: Alfredo SIMMONS Núñez.Ubicación: Biblioteca Central UMAG. Colección: Trabajo de titulación.Clasificación: T S 592c 2005
www.sid.umag.cl
• EQUIPAMIENTO ELECTRÓNICO PARA NAVEGACION RAYMARINE
www.raymarine.com

APENDICE ABREVE DESCRIPCION TECNICA DEL CARRO DE VARADA
APENDICE A: DESCRIPCION TECNICA DEL CARRO DE VARADA 56
El Astillero de Amar (M) emplazado en la actualidad en Bahía Catalina, cuenta con un carro varadero que data del año 1986, el cual fue construido por una empresa Sudafricana en conjunto con la Armada de Chile y de la cual nació la empresa (SAEM).
Dicha fusión canalizó todos sus esfuerzos para realizar la construcción de esta estructura, la cual se hizo pensando en satisfacer la necesidad que el rubro naviero demandaba en dicha época, que de acuerdo a estadísticas comerciales no era menor y fue así como en el año 2000 la Armada de Chile adquiere para si la totalidad de dicho Astillero y se termina la sociedad con la empresa Sudafricana. Y desde esa fecha pasa a cumplir funciones estratégicas para la defensa nacional y también como apoyo a las necesidades de empresas navieras nacionales y extranjeras. Tomando el nombre de Asmar Magallanes.

Este varadero cuenta con un riel marino para varar buques de hasta 3575 toneladas, el carro de varada tiene una longitud total de 145 m, y cuenta con un carro de transferencia de 150 m.
El carro de varada es introducido mar adentro hasta una distancia máxima de 300 m.
Por otra parte el carro de varada tiene otra particularidad la cual hace posible dividirlo en 2 secciones para así poder utilizar una de ellas con embarcaciones de menor tonelaje sin ser necesario desplazar todo el carro hacia el mar. Y poder realizar desvaradas y varadas simultaneas independientes. Es decir si se tienen 2 naves al interior del carro de varada es posible bajar una nave realizando la división del carro y la otra nave podría continuar en reparaciones. El carro de varada es tractado por un motor eléctrico de las siguientes características : 380 V., 385 HP, 504 AMP., y 50 Hz. de la General Electric con intercalaciones de velocidad más un freno magnético.

APENDICE B IMAGENES DE UNA SECUENCIA DE VARADA
APENDICE B: IMAGENES DE UNA SECUENCIA DE VARADA 57
CARRO EN POSICION INICIAL

FIG. B1 CARRO EN POSICION INICIAL DESPLAZAMIENTO DEL CARRO HACIA EL MAR
FIG. B2 CARRO EN DESPLAZAMIENTO HACIA EL MAR
APENDICE B: IMAGENES DE UNA SECUENCIA DE VARADA 58
CARRO EN POSICION FINAL PARA RECEPCION DE NAVE

FIG. B3 CARRO EN POSICION FINAL EN EL MAR
INGRESO DE NAVE AL INTERIOR DEL CARRO
FIG. B4 INGRESO DE LA NAVE AL CARRO
APENDICE B: IMAGENES DE UNA SECUENCIA DE VARADA 59
CARRO CON NAVE FUERA DEL AGUA Y LISTA A SER TRANSFERIDA

FIG. B5 CARRO EN POSICION FINAL FUERA DEL MAR

APENDICE CBREVE DESCRIPCION DE MODULOS DE ENTRADA Y SALIDA
DEL PLC MODICON
APENDICE C 60
C.1 MODULOS PARA EL PLC E984-265 BREVE DESCRIPCION.
El DEP 208 es un módulo de entradas binarias con ocho circuitos de entradas de 230 VCA independientes. Detecta las señales de entradas de los dispositivos de detección

de campo como botones pulsadores, conmutadores de límites o proximidad y otras fuentes de entrada de CA, y convierten dichas señales en niveles de tensión que puede utilizar el PLC en una exploración lógica.Las señales están cableadas en campo en un grupo de ocho entradas. Cada entrada está opto aislada del bus E/S.
LED
El DAP 208 tiene nueve LED. Un led verde en oposición al borne 1 señala la presencia de 5 V del bus de E/S. Ocho led rojos en oposición a los bornes 3, 5, 7, 9, 14, 16, 18 y 20 señalan la presencia de tensión en las entradas 1 a 8 , respectivamente.
DIAGRAMA DE CABLEADO Y ESQUEMA SIMPLIFICADO DEL DEP 208
FIG. C.1 DIAGRAMA DE CABLEADO
APENDICE C 61
C.2 VISTA GENERAL DEL MODULO DE SALIDA DEL DAP 208-258
El DAP 208/258 es un módulo de salida de 8 puntos de salidas de relé. Utiliza señales lógicas del controlador para activar ocho contactos de relee normalmente abiertos

y aislados individualmente. La tensión de alimentación para cualquier carga de salida debe ser igual a 24 a 154 VCC o 24 a 250 VAC.LED
El DAP 208/258 tiene nueve LED. Un LED verde en oposición al borne 1 señala la presencia de tensión en la bobina de relee cuando está ENCENDIDO Ocho LED rojos en oposición a los bornes 3, 5, 7, 9, 14, 16, 18 y 20 señalan cuando están ENCENDIDOS que las bobinas de relee están alimentadas en las salidas 1 a 8, respectivamente y señala que los contactos están cerrados y las cargas alimentadas. Estos LED están en paralelo con las bobinas y no con la carga.
El cableado de campo para cada salida se conecta a un borne doble. Este módulo requiere una alimentación de 24 VCC externa para soportar el accionador de relé (incluso si todas las salidas utilizan alimentación CA.). El DAP 258 funciona igual que el DAP 208, salvo que el DAP 258 opera en un rango de temperatura más amplio.El módulo DAP 258 está disponible con revestimiento conforme. El modelo con revestimiento conforme es el DAP 258C, que cumple con la Norma de ferrocarriles EN 50 155.
Cableado simplificado módulo de salida DAP 208/258
FIG. C.2 DIAGRAMA DE CABLEADO

APENDICE D
BREVE DESCRIPCION TECNICA DE SENSORES, ANEMOMETRO, MOTOREDUCTORES, CABLE DE CONTROL, TARJETA DE ADQUISICION DE
DATOS, PLC MODICON Y ELECTROVALVULA
APENDICE D 62
D.1 SENSOR DE POSICIONAMIENTO

FIG. D.1 SENSOR DE POSICIONSMIENTO
• Compuesto por deflector fotoeléctrico y reflector.• Carcaza de plástico.• Avisador acústico integrado.• Led de ayuda al ajuste.• Led de indicación visual.• Conexión por terminal roscado.• Voltaje de alimentación 20-264 VAC/DC• Dimensiones(mm) 70x18x45 y 85x27x61.• Distancia de detección 9m.• Temperatura de funcionamiento de -20ºC a + 55ºC.• Código RS 281-1717
APENDICE D 63
D2 ANEMOMETRO

FIG. D.2.1 TABLA DE ESPECIFICACIONES FIG. D.2.2 DIMENCIONES
FIG. D.2.3 DISPLAY DEL ANEMOMETRO
APENDICE D 64
D3 MOTOREDUCTORES

FIG. D.3 MOTOREDUCTOR
• Revoluciones de giro 20: 1• Base montable• Presión de trabajo máxima 163 lbs.
FIG. D.3.1 TABLA TORQUE/VELOCIDAD
• Entre 80 y 100 PSI que sería la presión del circuito principal en el astillero y de acuerdo a la curva de torque V/S velocidad , tenemos un torque nominal en libras por pulgada de aproximadamente 4000 lb. X pulgada. Con una velocidad nominal de aproximadamente 75 revoluciones por minuto.
APENDICE D 65

D4 MULTICONDUCTOR
FIG. D.4 DIAGRAMA DE CABLEADO
• Cable multiconductor de comunicación y control con apantallamiento individua de 22 awg.
• Tensión nominal de 300 V.• Temperatura de funcionamiento de -20ºC a + 60ºC
APENDICE D 66

D5 TARJETA DE ADQUISICION DE DATOS
Tarjeta de adquisición de datos PCI 6025E cuyas características más relevantes es que cuenta con 18 canales de los cuales 8 son diferenciales de entrada analógica con dos canales de salidas analógicas y un terminal de conexiones de 100 pines y 32 líneas de I/O digitales.
Esta tarjeta cuenta con sistemas de control de tiempo los cuales constan de tres grupos los cuales son entradas análogas, salidas análogas y un contador de propósito general. Estos grupos son un total de 7 en 24 BIT y 3 en 16 BIT. Con una máxima resolución de 50 nS.
Esta placa suministra 2 canales de voltaje para salidas analógicas al conector I/O. Con un rango de +-10 V.
También poseen 8 líneas digitales de I/O (0…7) para uso general.
FIG. D.5 REGLETA DE CONEXIONES PCI -6025E
APENDICE D 67

D6 PLC MODICON
FIG.D.6 CARACTERISTICAS DEL PLC MODICON
FIG.D.6.1 FUENTE DE PODER EXTERNA PARA MODULOS DE I/O
DATOS DE PLACA
PLC MODICONTSX COMPACTPC- E984-265CPU 8 K LOGIC 16 KINTEGRATED PS 24 VOL DC, 1 AMP.60 º C OPERACION
APENDICE D 68

D7 ELECTROVALVULA
FIG.D.7 ELECTOVALVULA

APENDICE E
BREVE DESCRIPCION TECNICA DE SOFTWARE LABVIEW

APENDICE E: 69
E1 BREVE DESCRIPCION DEL SOFTWARE
LabVIEW constituye un revolucionario sistema de programación para aplicaciones
que involucren adquisición, control, análisis y presentación de datos. Las ventajas que
podemos mencionar son las siguientes:
• Reduce el tiempo de desarrollo en las aplicaciones al menos de 4 a 10 veces
debido a que es muy intuitivo y fácil de aprender.
• Dota de gran flexibilidad al sistema permitiendo cambios y actualizaciones tanto en
el software como hardware.
• Da la posibilidad a los usuarios de crear soluciones completas y complejas.
• Con un único sistema de desarrollo se integran las funciones de adquisición,
análisis y presentación de datos.
• El sistema está dotado de un compilador gráfico para lograr la máxima velocidad
de ejecución posible.
• Tiene la posibilidad de incorporar aplicaciones escritas en otros lenguajes.
LabVIEW es un entorno de programación destinado al desarrollo de aplicaciones,
similares a los sistemas de desarrollo comerciales que utilizan el lenguaje en C o Basic.
Sin embargo, LabVIEW se diferencia de dichos programas en un importante aspecto: los
citados lenguajes de programación se basan en líneas de textos para crear el código de
fuente del programa, mientras que LabVIEW emplea la programación gráfica o lenguaje
en C para crear programas basados en diagramas de bloques.
Para el empleo de LabVIEW no se requiere de gran experiencia en programación,
ya que se emplean icono, términos e ideas familiares a científicos e ingenieros y se apoya
sobre símbolos gráficos en lugar de lenguaje escrito para construir las aplicaciones. Por
ello resulta mucho más intuitivo que el resto de lenguaje de programación convencional.

APENDICE E 70
LabVIEW posee extensas librerías de funciones y subrutinas. Además de funciones
básicas de todo lenguaje de programación, LabVIEW incluye librerías específicas para la
adquisición de datos, control de instrumentación VXI, GPIB y comunicación serie, análisis
presentación y almacenamiento de datos.
LabVIEW también proporciona potentes herramientas que facilitan la depuración de
los programas.
Los programas desarrollados mediante LabVIEW se denominan Instrumentos
virtuales (VIS), porque su apariencia y funcionamiento imitan los de un instrumento real.
Sin embargo son análogos a las funciones creadas con los lenguajes de programación
convencionales. Los VIS tienen una parte interactiva con el usuario y otra parte de código
de fuente, y aceptan parámetros procedentes de otros VI.
Todos los VIS tienen un panel frontal y un diagrama de bloques. Las paletas
contienen las opciones que se emplean para crear y modificar los VI.
El panel frontal es la interfaz gráfica del VI con el usuario. Recoge las entradas
procedentes del usuario y representa las salidas proporcionadas por el programa.
FIG. E1: PANEL FRONTAL

APENDICE E 71
El diagrama de bloques constituye el código de fuente del VI. En el diagrama de
bloques es donde se realiza la implementación del programa del VI para controlar o
realizar cualquier procedimiento de las entradas y salidas que se crearon en el panel
frontal.
El diagrama de bloque incluye funciones y estructuras integradas en las librerías
que incorpora LabVIEW.
FIG. E2 DIAGRAMA DE BLOQUES
(a) Función de generación aleatoria utilizada para generar valores al azar.
(b) Terminales (control e indicador) que representan los dispositivos a conectar.
(c) Estructura simple de acuerdo a ciclo que se desea crear.
El diagrama en bloques se construye conectando los distintos objetos entre sí,
como si de un circuito se tratara. Los cables unen terminales de entrada y salida con los
objetos correspondientes y por ellos fluyen los datos.
Controles llamados paletas son utilizados para crear y modificar tanto en el panel
frontal como en el panel de diagrama de bloques.
FIG. E3 PALETA DE COMANDOS

APENDICE E 72
Estos controladores contiene las herramientas necesarias para editar y depurar los
objetos del panel frontal como del diagrama de bloques.
FIG. E4 PALETA DE CONTROLES
La paleta de control se utiliza únicamente en el panel frontal. Contiene todos los
controles e indicadores que se emplearán para crear la interfaz del VI con el usuario.
La paleta de funciones se emplea en el diseño del diagrama de bloques. La paleta
de funciones contiene todos los objetos que se emplean en la implementación del
programa del VI, ya sean funciones aritméticas, de entrada / salida de señales, entrada /
salida de datos a fichero, adquisición de señales, temporización de la ejecución del
programa.
FIG. E5 PALETA DE FUNCIONES

APENDICE E 73
E2 PROGRAMACION EN LABVIEW
Con el entorno Gráfico de programación de LabVIEW se comienza a programar a
partir del panel frontal.
En primer lugar se definirán y seleccionarán de la paleta de controles todos los
controles (entradas que dará el usuario) e indicadores (salidas que representarán en
pantalla los resultados).
Una vez colocados en la ventana correspondiente al panel frontal todos los objetos
necesarios, en ella se encuentran los terminales correspondientes a los objetos situados
en el panel frontal, dispuestos automáticamente por LabVIEW.
Se deben ir situando las funciones, estructuras, etc. que se requieren para el
desarrollo de programa, las cuales se unen a los terminales mediante cables.
Para facilitar la tarea de conexión de todos los terminales, en el menú “Help” puede
elegirse la opción “Show Help”, con lo que al colocar el cursor del ratón sobre un elemento
aparece una ventana con información relativa a éste (parámetros de entrada y salida).
Además, si se tiene seleccionado el cursor de cableado, al situar éste sobre un elemento
se muestran los terminales de forma intermitente.
Ahora para el desarrollo de nuestro VI es necesario definir los sensores que
deseamos utilizar y cual es la variable a medir, objeto poder acotar al máximo las
necesidades anteriormente planteadas y poder llevar a cabo nuestro proyecto.
Se recuerda que se utilizarán sensores del tipo interlock los cuales al cambiar de
estado (N/A a N/C) enviarán sus señales a través del multiconductor para ser
acondicionados y posteriormente recepcionados por la tarjeta de adquisición de datos que
transformará esta señal al lenguaje del software LabVIEW.
También mediante el multiconductor se transmitirán señales digitales provenientes
de los sensores de posición y que se transmitirán de la misma forma para ser visualizados
en pantalla por el software LabVIEW. Como también serán transmitidas las señales
analógicas para medir corriente del motor eléctrico, velocidad y dirección del viento,
presión en el circuito de aire y distancia recorrida por el carro

APENDICE E 74
E3 LABVIEW
A través de los años el software LabVIEW se ha ido perfeccionando y para aquellos que se iniciaron con la versión 6.0 se les comunica que la National Instrument ya ha elaborado una versión más sofisticada y con mayores recursos y por supuesto mucho más amigable de lo que ya es el software y están en la versión 8.1.
Como se ha definido este software es sin lugar a dudas un revolucionario sistema para graficar aplicaciones que involucren adquisición, control, análisis y presentación de datos.
Ahora podemos encontrar en la Web un gran soporte para poder adquirir información de cursos o tutorías los cuales son de fácil comprensión y la mayoría de las dudas se pueden aclarar pues la National Instrument cuenta con profesionales a los cuales se les puede consultar mediante correo referente a alguna aplicación o algún proyecto por ejecutar y entregan toda la información necesaria como para poder ir desarrollando y mejorando la idea planteada.
LINK DE CONECCION
LabVIEW Edición de Estudiantes www.ni.com.labviewse
Recursos Web www.ni.com
Zona de Desarrollo NI www.zone.ni.com
Notas de Aplicaciones Grupo de noticias LabVIEW www.info-labview.org
Instrument Driver Library www.ni.com/idnet

APENDICE F
COTIZACIONES

APENDICE F 75
F1 PLC

APENDICE F 76
F2 TARJETA DE ADQUISICION DE DATOS

APENDICE F 77
F3 WINCHES NEUMATICOS
Señores: ASMAR Fecha: 04/09/2007Rut : 1-9 -Local: 00 Fax :Dirección: Fono:Ciudad : TALCAHUANOAt.Sr(a): MIGUEL PRIETO C O T I Z A C I O N [163381]Referencia:mapriq@gmail.com--------------------------------------------------------------------------------ITEM DIGITO UNID CANT. D E S C R I P C I O N UNIT. $ TOTAL $--------------------------------------------------------------------------------001 02110644 CU 1,00 MOTOREDUCTOR GAST 3,2HP 3.465.000,00 3.465.000 CAT: 16AM-13-HB20 15-5 RPM GIRO REVERSIBLE EJE 1 7/8", REVERSIBLE GAST MANUFACTUR U.S.A.
FORMA DE PAGO:
--------------------------------------------------------------------------------VALORES NETOS MAS I.V.A., VALIDEZ DE LA OFERTA 15 DIASSTOCK PARA ENTREGA INMEDIATA, SUJETO A VENTA PREVIA.MATERIAL PUESTO EN NUESTRAS BODEGAS: SANTIAGO, VALPARAISO, TALCAHUANO, ANTOFAGASTA Y/O PUERTO MONTTCONSULTE POR AMPLIACION DE STOCK EN PRODUCTOS VICKERS Y MOTORES CHAR-LYNN--------------------------------------------------------------------------------NOTA:
Esperando que la presente cotización sea de su interés, Saluda Atte.
MAURICIO PEZOVendedor Técnicompezo@vignola.cl--------------------------------------------------------------------------------- Valparaíso Santiago Talcahuano Antofagasta Puerto Montt 32-351111 02-7758385 41-588858 55-453030 65-350150 w w w. v i g n o l a. c l
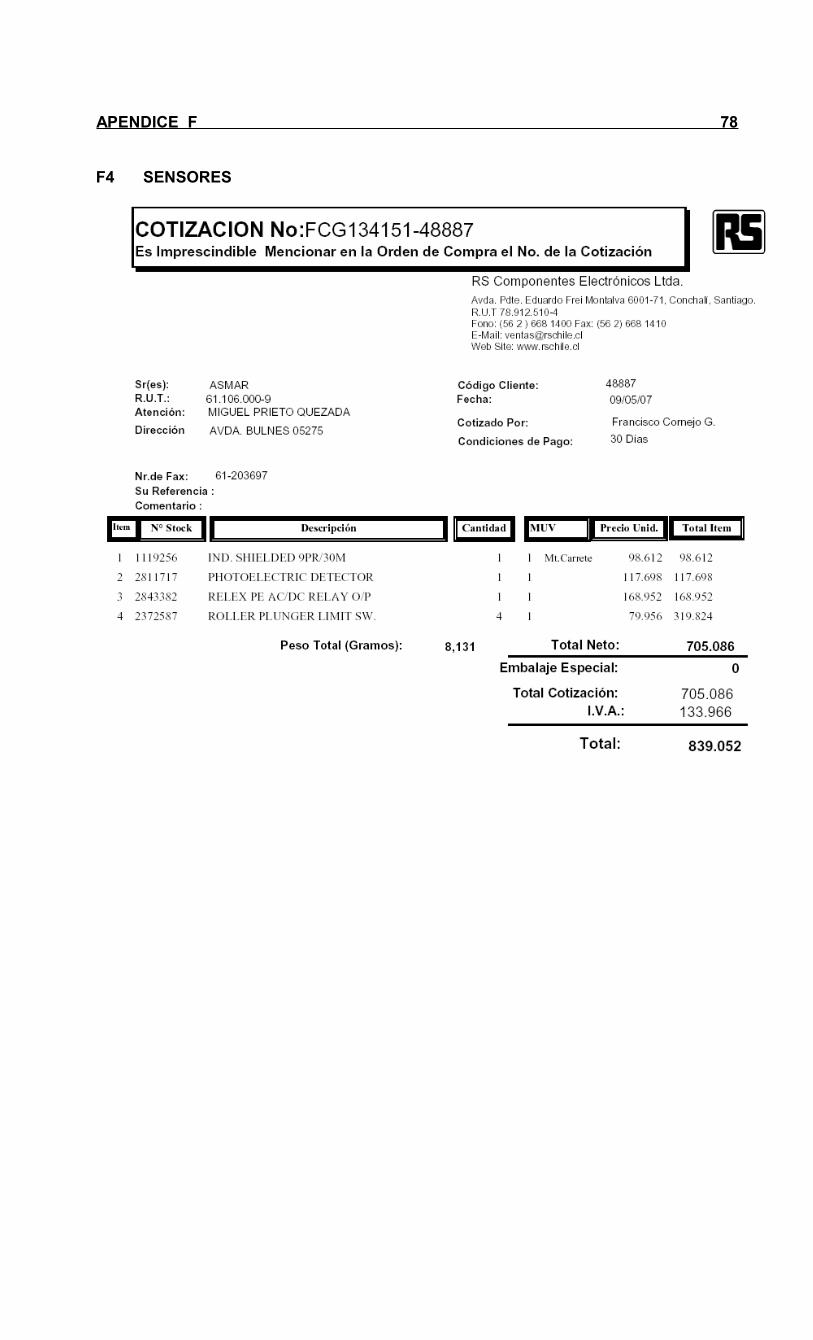
APENDICE F 78
F4 SENSORES

APENDICE F 79
F5 ANEMOMETRO

APENDICE F 80
F6 CAMARA Y MONITOR

APENDICE F 81
F7 ELECTROVALVULA
Señores :ASMAR Fecha: 16/10/2007Rut : 1-9 -Local : 00 Fax :Direccion: Fono :Ciudad :TALCAHUANOAt.Sr(a).:MIGUEL PRIETO C O T I Z A C I O N [164541]Referencia:mapriq@gmail.com--------------------------------------------------------------------------------ITEM DIGITO UNID CANT. D E S C R I P C I O N UNIT. $ TOTAL $--------------------------------------------------------------------------------001 02053152 UN 1,00 VALVULA SEGURIDAD 1" NORGREN 469.700,00 469.700 CAT:16-001-060# 0-125 PSI. AIRE 480 P.C.M. NORGREN CO U.S.A.002 02143003 CU 1,00 VALV. POPPET 3V/2P N.CERRADA 446.600,00 446.600 CAT:D1036C-00-P1 CONEX. 1" NPT 110 V 50 HZ
NORGREN VALVULA U.S.A
FORMA DE PAGO:
--------------------------------------------------------------------------------VALORES NETOS MAS I.V.A., VALIDEZ DE LA OFERTA 15 DIASSTOCK PARA ENTREGA INMEDIATA, SUJETO A VENTA PREVIA.MATERIAL PUESTO EN NUESTRAS BODEGAS : SANTIAGO, VALPARAISO, TALCAHUANO, ANTOFAGASTA Y/O PUERTO MONTTCONSULTE POR AMPLIACION DE STOCK EN PRODUCTOS VICKERS Y MOTORES CHAR-LYNN--------------------------------------------------------------------------------NOTA :
Esperando que la presente cotización sea de su interés, Saluda Atte.
MAURICIO PEZOVendedor Técnicompezo@vignola.cl--------------------------------------------------------------------------------- Valparaíso Santiago Talcahuano Antofagasta Puerto Montt 32-351111 02-7758385 41-588858 55-453030 65-350150 w w w . v i g n o l a . c l

APENDICE G IMAGENES DE LABORATORIO

APENDICE G 82
G1 VISTA GENERAL DEL PROYECTO PLC, MODULOS, CONSOLA, FUENTES DE PODER Y MAQUETA DEL CARRO
FIG. G.1 IMPLEMENTACION EN LABORATORIO
PLC MODICON
MODULOS DE ENTRADA Y SALIDA DISCRETA
CONSOLA DE PULSADORES
FUENTES DE PODER
MAQUETA

APENDICE G 83
G2 MAQUETA DEL CARRO CON SUS 4 WINCHES REPRESENTADO POR MOTORES ELECTRICOS
FIG. G.2 MAQUETA DEL CARRO DE VARADA
WINCHE Nº1
CARRO DE VARADA
WINCHE Nº2
WINCHE Nº3

APENDICE G 84
G3 MAQUETA CON SUS 4 MOTORES ELECTRICOS
FIG. G.3 REPRESENTACION DE WINCHES
WINCHE Nº1 WINCHE Nº3 WINCHE Nº2 WINCHE Nº4

APENDICE G 85
G4 CONSOLA FUNTE DE PODER Y MAQUETA
FIG. G.4 CONSOLA Y FUENTE DE PODER
CONSOLA FUENTE DE PODER
MAQUETA DE CARRO DE VARADA

APENDICE G 86
G5 PLC Y MODULOS DE ENTRADA Y SALIDA
FIG. G.5 PLC Y SUS MODULOS DE ENTRADA Y SALIDA
PLC MODICON FUENTE DE PODER EXTERNA
MODULO DE ENTRADA DISCRETA
MODULO DE SALIDA DISCRETA

APENDICE H PLANO ESQUEMATICO

APENDICE H 87
H1 PLANO ESQUEMATICO
FIG. H.1 PLANO ESQUEMATICO
En el presente esquema se muestra la red de aire del astillero la cual está existente y se acoplará a nuestro carro de varada. La presión de aire en el circuito es de 100 PSI.
Las líneas de control de las electrovalvulas más los sensores de presión y el sensor de posicionamiento serán trasladadas por nuestro cable multiconductor hasta la sala de control pilar box.
En la sala de control Pilar Box se realizará el monitoreo y dirección de nuestro proyecto de control y vigilancia al carro de varada.
RED DE AIRE EXISTENTE
RED DE 110VAC. EXISTENTE
SALA DE CONTROLPILAR BOX
WINCHES NEUMATICOS
ELECTOVALVULAS
SENSORES DE PRESION
SENSOR DE POSICIONAMIENTO












![Trelew [El Topo Blindado]](https://img.dokumen.tips/doc/110x75/577cc8511a28aba711a2799a/trelew-el-topo-blindado.jpg)
















