Embed Size (px)
Citation preview

Unfolding 3D Laser Images of
Underground Tunnels
Po Kong Lai, School of Electrical Engineering & Computer Science, University of Ottawa
Claire Samson, Dept. of Earth Sciences, Carleton University
AGU-CGU-GAC-MAC Joint Assembly
May 4th 2015
Montreal, Québec

Motivation & Goals
• Visualization of 3D mesh models of tunnels requires:
– Multiple vantage points
– Dedicated high-performance and costly hardware in field
• Main Goal:
– Take a triangulated mesh model generated from a point
cloud of an underground tunnel and convert it into a 2D
map
– The final 2D map should be easy and intuitive to interpret
1

Dataset
• Subsection of large underground tunnel
Outside View – Double Sided Lighting
41 m
8.2 m
6.7 m
2

3

Background Theory
• Well studied problem in differential geometry
– Known as surface parametrization
• Very few surfaces can be mapped from 3D to 2D
without error
– Error is known as metric distortion
– Visualized as stretching and shearing of the surface
– The degree of stretching and shearing described through
the Jacobian matrix
4

Surface Parameterization
• Given:
– Surface 𝑆 ∈ ℝ3
– Parameter domain Ω ∈ ℝ2
• Find a bijective function 𝑓 such that:
– 𝑓 ∶ 𝑆 → Ω
– 𝑓−1 ∶ Ω → S
• When 𝑆 is a mesh, the problem is known as mesh
parameterization
5

Mesh Parameterization
• Let 𝑀 be a mesh with the following parametric
representation:
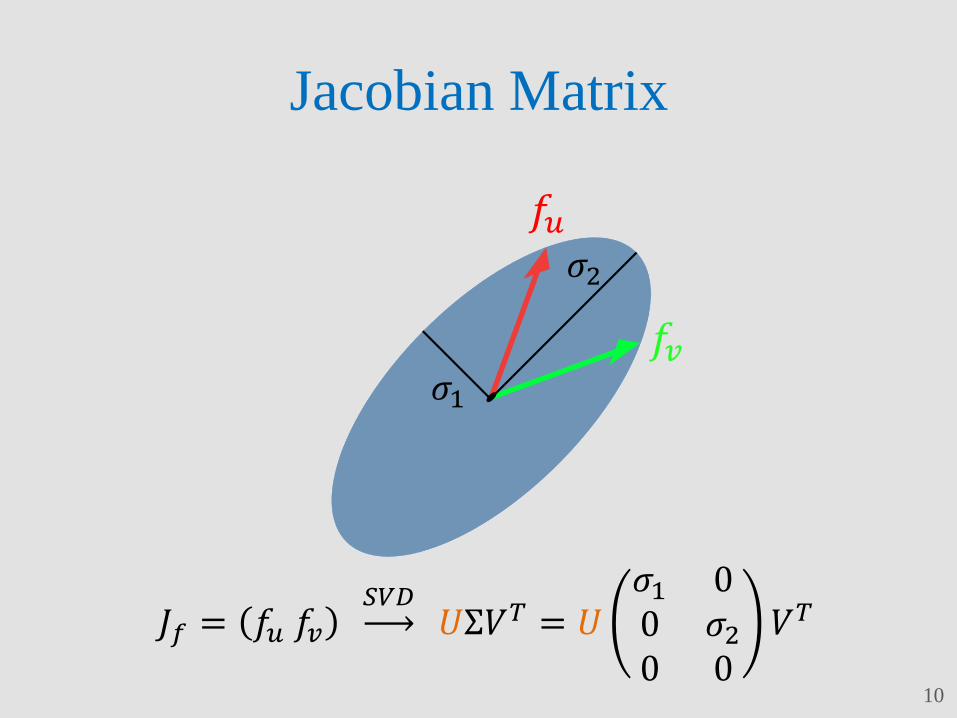
• The partial derivatives 𝑓𝑢 and 𝑓𝑣 are vectors which
maps movement in Ω to 𝑀
𝑓 𝑢, 𝑣 = (𝑥 𝑢, 𝑣 , 𝑦 𝑢, 𝑣 , 𝑧 𝑢, 𝑣 ), where 𝑢, 𝑣 ∈ Ω
6

Jacobian Matrix
𝐽𝑓 = 𝑓𝑢 𝑓𝑣 𝑆𝑉𝐷
𝑈Σ𝑉𝑇 = 𝑈𝜎1 00 𝜎20 0
𝑉𝑇
𝑓𝑢
𝑓𝑣
7

Jacobian Matrix
𝑓𝑢
𝑓𝑣
8
𝐽𝑓 = 𝑓𝑢 𝑓𝑣 𝑆𝑉𝐷
𝑈Σ𝑉𝑇 = 𝑈𝜎1 00 𝜎20 0
𝑉𝑇

Jacobian Matrix
𝜎1 𝜎2
𝑓𝑢
𝑓𝑣
9
𝐽𝑓 = 𝑓𝑢 𝑓𝑣 𝑆𝑉𝐷
𝑈Σ𝑉𝑇 = 𝑈𝜎1 00 𝜎20 0
𝑉𝑇
Jacobian Matrix
𝜎1
𝜎2
𝑓𝑣
𝑓𝑢
10
𝐽𝑓 = 𝑓𝑢 𝑓𝑣 𝑆𝑉𝐷
𝑈Σ𝑉𝑇 = 𝑈𝜎1 00 𝜎20 0
𝑉𝑇

Jacobian Matrix
𝑁 Tangent Plane
3D Surface
𝜎2
𝜎1
𝑓𝑢
𝑓𝑣
11
Metric Distortion
• Special combinations of 𝜎1 and 𝜎2:
– 𝜎1 = 𝜎2 = 1 ↔ 𝑓 is isometric (preserves length)
– 𝜎1 = 𝜎2 ↔ 𝑓 is conformal (preserves angles)
– 𝜎1𝜎2 = 1 ↔ 𝑓 is equiareal (preserves area)
• In practice: some combination of conformal and
equiareal
• Goal of mesh parameterization algorithms:
– Minimize conformal/equiareal error
12

Mesh Parameterization Methods
• Examined two state-of-the-art methods:
– Least Squares Conformal Mapping (LSCM)
– Angle Based Flattening (ABF++)
• LSCM
– Minimize conformal error per triangle: 𝐸𝑡 = 𝜎1,𝑡 − 𝜎2,𝑡2
• ABF++
– Minimize difference between 3D angles and 2D angles of
the triangles
13

Strike & Dip Visualized on Mesh
14

LSCM and ABF++ Results
LSCM ABF++ 15

Why the strange shape?
• Both methods are optimization based and thus has no
constraint for intuitive interpretation
• Any “bumps” are flattened
• To preserve the 3D surface area it must be displaced
in the 2D map
• Large number of bumps results in unintuitive final
shape
16

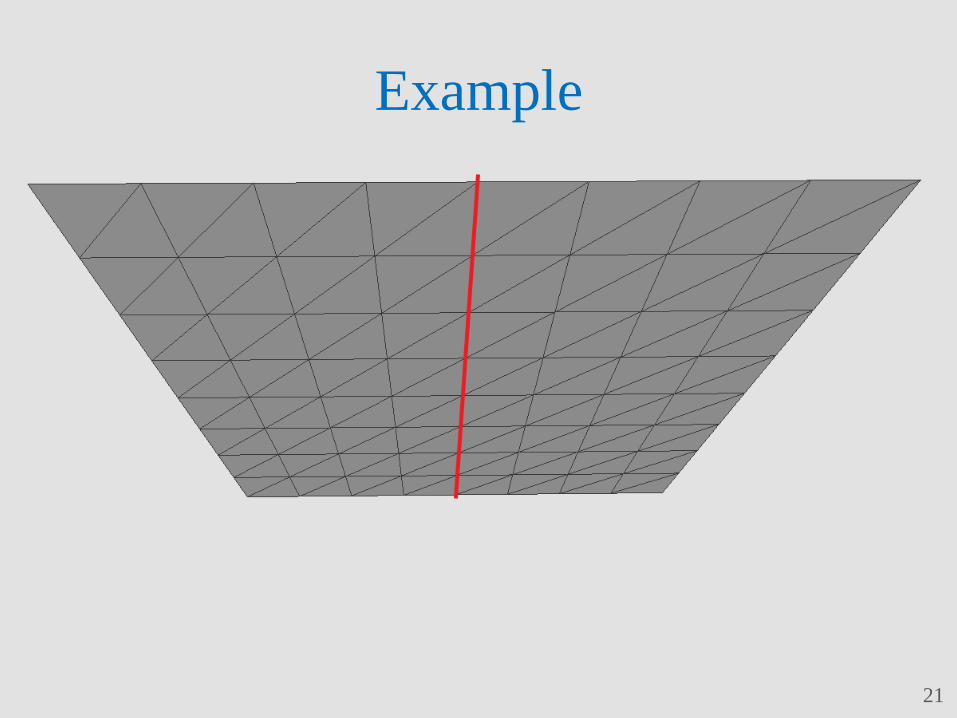
Mesh Deformation and Projection
Strategy
• Apply a global function, 𝐺 𝑣, 𝑑 to all vertices
– Implemented in Blender as a modifier
– Rotates the outer vertices at a greater rate than the inner
vertices
• Manually determine 𝑑 and position mesh to be
projected onto a 2D plane
17

Example
18

Example
19

Example
20
Example
21

v
u
(0,0)
Tunnel Mesh Deformed
22

Strike & Dip Visualized on Mesh
23
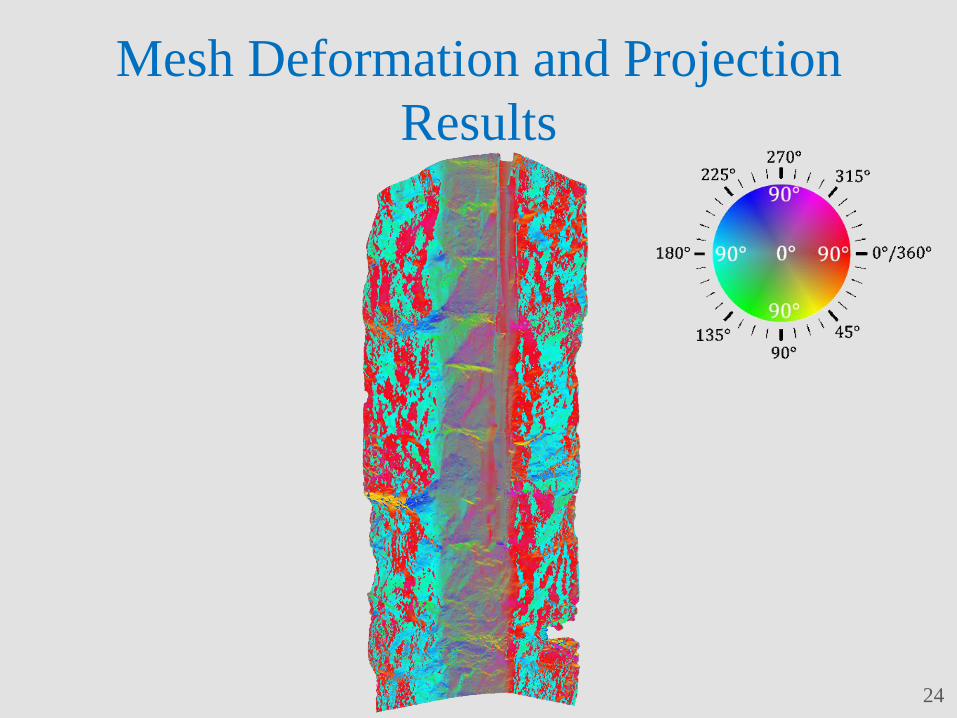
Mesh Deformation and Projection
Results
24

Metric Distortion Evaluation
• Utilize measures found in differential geometry
• Stretch 𝐿2
– 𝐿2 𝑡 =𝜎1,𝑡2 +𝜎2,𝑡
2
2 where t is a triangle in mesh 𝑀
– 𝐿2 𝑀 = 𝐿2 𝑡
2𝐴𝑟𝑒𝑎 𝑡𝑡∈𝑀
𝐴𝑟𝑒𝑎 𝑡𝑡∈𝑀
• Angular distortion
– 𝐴𝑛𝑔𝐷 𝑀 = 𝜃3𝑑−𝜃2𝑑
2𝜃3𝑑,𝜃2𝑑 ∈𝐴
𝐴 where 𝐴 is the set of
angle pairs
25

Metric Distortion Evaluation
Unfolding Method Stretch 𝐿2 Angular Distortion
LSCM 636554 0.0404
ABF++ 357237 0.0390
Mesh Deformation
& Projection
228 0.0814
26

Metric Distortion Visualization
ABF++ Mesh Deformation
&
Projection 27

Summary
• Mesh parameterization algorithms:
– Automatic
– Introduces the least amount of angular distortion
– Produce unintuitive 2D maps
• Mesh deformation and projection strategy
– Requires user input
– Good compromise between angular and stretch distortion
– Produces intuitive 2D maps
28

Conclusion
• Best approach for unwrapping 3D mesh models of
tunnels:
– First apply automatic mesh parameterization
– Perform mesh deformation and projection if
parameterization is not satisfactory
29

References
1. Hormann, Kai, Bruno Lévy, and Alla Sheffer. “Mesh parameterization:
Theory and practice.” (2007).
2. Lévy, Bruno, et al. “Least squares conformal maps for automatic texture
atlas generation.” ACM Transactions on Graphics (TOG). Vol. 21. No. 3.
ACM, 2002.
3. Sheffer, Alla, et al. “ABF++: fast and robust angle based
flattening.” ACM Transactions on Graphics (TOG) 24.2 (2005): 311-330.
4. Blender. http://www.blender.org/foundation/
5. MeshLab. http://meshlab.sourceforge.net/
6. ALICE Graphite. http://alice.loria.fr/WIKI/index.php/Graphite/Graphite
30





























