-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
1/14
http://pim.sagepub.com/the Maritime Environment
Engineers, Part M: Journal of Engineering forProceedings of the
Institution of Mechanical
http://pim.sagepub.com/content/223/4/503The online version of
this article can be found at:
DOI: 10.1243/14750902JEME157
223: 5032009oceedings of the Institution of Mechanical
Engineers, Part M: Journal of Engineering for the Maritime
Environment
Z Zhang, X Huang, Y Chen and H HuaUnderwater sound radiation
control by active vibration isolation: An experiment
Published by:
http://www.sagepublications.com
On behalf of:
Institution of Mechanical Engineers
can be found at:Maritime EnvironmentProceedings of the
Institution of Mechanical Engineers, Part M: Journal of Engineering
for theAdditional services and information for
http://pim.sagepub.com/cgi/alertsEmail Alerts:
http://pim.sagepub.com/subscriptionsSubscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
http://pim.sagepub.com/content/223/4/503.refs.htmlCitations:
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/content/223/4/503http://pim.sagepub.com/content/223/4/503http://pim.sagepub.com/content/223/4/503http://www.sagepublications.com/http://www.sagepublications.com/http://www.imeche.org/homehttp://www.imeche.org/homehttp://pim.sagepub.com/cgi/alertshttp://pim.sagepub.com/cgi/alertshttp://pim.sagepub.com/subscriptionshttp://pim.sagepub.com/subscriptionshttp://pim.sagepub.com/subscriptionshttp://www.sagepub.com/journalsReprints.navhttp://www.sagepub.com/journalsReprints.navhttp://www.sagepub.com/journalsPermissions.navhttp://www.sagepub.com/journalsPermissions.navhttp://www.sagepub.com/journalsPermissions.navhttp://pim.sagepub.com/content/223/4/503.refs.htmlhttp://pim.sagepub.com/content/223/4/503.refs.htmlhttp://pim.sagepub.com/content/223/4/503.refs.htmlhttp://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/content/223/4/503.refs.htmlhttp://www.sagepub.com/journalsPermissions.navhttp://www.sagepub.com/journalsReprints.navhttp://pim.sagepub.com/subscriptionshttp://pim.sagepub.com/cgi/alertshttp://www.imeche.org/homehttp://www.sagepublications.com/http://pim.sagepub.com/content/223/4/503http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
2/14
Underwater sound radiation control by active vibrationisolation:
an experimentZ Zhang*, X Huang, Y Chen, and H Hua
State Key Laboratory of Mechanical Systems and Vibration,
Shanghai Jiaotong University, Shanghai, Peoples Republic
of China
The manuscript was received on 14 February 2009 and was accepted
after revision for publication on 29 June 2009.
DOI: 10.1243/14750902JEME157
Abstract: An experimental system, mainly including a rotary
machine, four active vibrationisolators and a water container, was
established to investigate the role of active vibration
isolation in suppressing vibration transmission as well as
underwater sound radiation. Finiteelement analysis and experimental
modal testing were employed to exhibit and validatevibration modes
of the fluid-coupled structure and the radiated sound field in
water. Soundfield given by this validated finite element model is
taken as the substitution for a realmeasurement. In the experiment,
the fundamental frequency of the rotary machine was chosento be
nearly equal to a natural frequency of the coupled system in order
to create a sound fieldin the water container by resonant
structural vibration. The rotary machine is supported by thefour
electromagnetic vibration isolators, which suppress the
quasi-periodical local vibrationindependently according to an
adaptive control method. The measured results havedemonstrated that
low-frequency sound radiation can be reduced by local active
vibrationisolation.
Keywords: active vibration isolation, underwater sound
radiation, fluidstructure interaction,
adaptive control
1 INTRODUCTION
Fluidstructure interaction and the pertinent sound
radiation have been thoroughly investigated since
the 1950s, but the research on active control of
sound radiation started very late. Compared with the
abundant work in the active control of structure-
borne sound in the air, there is scant research
concerning active control of vibration and/or sound
radiation from structures in heavy fluid [13].
However, structures filled with and/or surrounded
by heavy fluid are frequently met in applications, for
example, in the area of ship transportation. Vibration
of ship structures induced by power machinery is
harmful to passengers as well as the ocean environ-
ment, especially the vibration at low frequencies,
usually less than several hundred Hertz, is difficult to
control by passive means. Active isolation of vibra-
tions of power machinery is an effective means to
reduce vibration transmission and hence the sound
radiation of structures. There is plenty of research on
active vibration isolation, concerning control algo-
rithms as well as implementation [46]. Vibration of
structures is strongly influenced by heavy fluid at
low frequencies. The added inertia effect of fluid
clearly changes the natural vibration frequencies of
structures and, accordingly, the radiation of sound.
Therefore, fluidstructure interaction should be
considered in the control of low-frequency vibration.
Currently, the commonly used methods in describ-
ing fluidstructure interaction are the finite element
method (FEM) and/or the boundary element
method (BEM). The FEM/BEM methods are superior
in analysing structures coupled with unbounded
domain of fluid [79]. For the analysis of steady-state
structural vibration and sound radiation, the
coupled motion is usually given in the frequency
domain with fluid compressibility taken into ac-count. However,
it is more flexible to apply a time
*Corresponding author: State Key Laboratory of Mechanical
Systems and Vibration, Shanghai Jiaotong University,
Shanghai,
Peoples Republic of China.email: [email protected]
503
JEME157 Proc. IMechE Vol. 223 Part M: J. Engineering for the
Maritime Environment
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
3/14
domain model in simulation and to investigate non-
linearity in active vibration control. In order to carry
out active vibration isolation in real time, a lower
order model that describes the fluidstructure inter-
action with sufficient accuracy is necessary. The
validated numerical model (modal model) and the
directly measured model are appropriate to real-
time control and the latter is preferable in practice
and is adopted in this paper.
Adaptive cancellation is one of the adaptive
strategies that can cancel periodic disturbances
and is used widely in many fields, such as signal
processing as well as control engineering. In active
vibration isolation, cancellation with tracking filters
can suppress tonal vibrations at specified frequen-
cies, but needs online frequency estimation since the
centre frequencies of these filters are adjustedaccording to
disturbing forces/moments. Filtered-x
least mean squares (FxLMS) and recursive least
squares are important adaptive control algorithms
and, especially, FxLMS is often used in real applica-
tions owing to its fast computation and easy imple-
mentation. In noise cancellation, FxLMS is used
independently or combined with tracking filters to
control harmonic sound [1012]. FxLMS can also be
applied in the control of low-frequency vibration of
thin plates, where the vibration control involves
fluidstructure interaction [3]. In the control of
engine-induced mount vibration, the multi-channelactive
vibration isolation scenario with FxLMS has
achieved notable reduction in vibration [4]. In the
FxLMS algorithm, controller weights are updated
according to error signals and a large disturbance in
the error will lead to excessive adaptation of weights,
which can cause saturation in the controller output
and consequently deteriorate control performance.
For active vibration isolation, saturation will cause
high-frequency vibrations and even resonance in an
isolation system. However, controller saturation in
active vibration isolation has been rarely concerned
[13]. Non-linearity in vibration isolation is compli-cated and
is usually related to a particular problem.
In this paper, active vibration isolation and its
influence on the underwater sound field in a
plexiglass water container are discussed by an
experiment, which is the subsequent work of an
early investigation by the authors [9]. The work
demonstrates the effectiveness of active isolation in
the attenuation of sound radiation as well as the
influence of vibration modes to the radiated sound
field. Before conducting the experiment, FEM is first
employed to analyse the coupled vibration andexhibit underwater
sound field corresponding to
the natural vibration modes. The numerical model
and results are used to explain the controlled sound
field. In the implementation of active vibration
isolation, the adaptive controller is embedded with
tracking filters. The role of tracking filters is to track
vibration signals of oscillating frequencies. More-
over, saturation in controller output is alleviated by
compressing the updating of weights of the adaptive
controller and accordingly a good performance of
active isolation in the presence of abnormal dis-
turbances can be expected [14].
Detailed discussion is given in five sections. Finite
element analysis and model validation are given in
section 2; section 3 gives a short discussion on the
adaptive control algorithm; Experimental results are
presented in section 4, and conclusions are pre-
sented in section 5.
2 ANALYSIS AND VALIDATION OF THEEXPERIMENTAL MODEL
For the analysis of interaction between structures
and fluid within a finite space, the finite element
method is usually an appropriate choice since the
vibration displacements and sound pressure can be
described by a discrete model of finite degrees of
freedom. The natural vibration modes of the coupled
system are then obtained by solving matrix eigen-
value problems [15]. The purpose of numerical
analysis is to exhibit sound field in the water, which
is usually easy to simulate but difficult to measure.
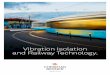
One part of the experimental model is the
plexiglass water container with a plexiglass plate
installed on its top, as shown in Fig. 1. The wall
thickness of the container is 50 mm and its dimen-
sions are 60067006800 mm (height). The plate is
20 mm thick and the dimensions of the surface in
contact with water are 3006600mm. In the finite
element model, the container is modelled with 8512
solid elements, the plate with 296 shell elements and
the water with 23 013 fluid elements. Mechanical
properties of the materials are listed in Table 1.
The coupling between the container and water is
on the five interfaces where the container contacts
the water. The top surface of the water is partly
coupled with the plate and there are two separate
free water surfaces. In the computation, the pressure
on the free surfaces is set to zero (The effect of air is
neglected and the coupled system is assumed to
vibrate in vacuo). The model without water is first
analysed, and the first four natural frequencies of the
dry plate are listed in Table 2, in which thecomputed results
and the measured results obtained
504 Z Zhang, X Huang, Y Chen, and H Hua
Proc. IMechE Vol. 223 Part M: J. Engineering for the Maritime
Environment JEME157
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
4/14
by modal testing are very close. Then, the model
with water is analysed and the first four natural
frequencies of the wet plate are also listed in Table 2.
As can be seen, the computed frequencies are again
close to the measured ones. In Table 2, all the
frequencies of the plate clearly decrease after it is
coupled with the water, which implies a strong
interaction between the plate and the water. Figure 2
gives the first four mode shapes of the plate coupled
with water. In these mode shapes, the first and the
third are bending modes and the second and the
fourth are torsional modes. Pressure distributions
corresponding to the four natural modes are shown
in Fig. 3. As can be seen, the distribution is closely
related to a vibration mode and the maximum
pressure corresponds almost to the largest ampli-
tude of the mode shape.The finite element model was validated by
modal
testing. Apart from the natural frequencies, mode
shapes of the plate in the coupled system were also
measured. Figure 4 gives the measurement points as
well as the measured mode shapes. The location of
these points is determined on the basis of computed
mode shapes in order fully to exhibit the node lines
as well as the peak lines. Compared with the shapes
in Fig. 2, the measured shapes have almost the same
peak and node lines.
As the model is validated, one can obtain a
reasonable pressure field in the water container byanalysis.
Figures 5(a) and 6(a) are slices of pressure
distribution corresponding respectively to the first
and second natural vibration modes of the plate. The
two slices are at the same location, 150 mm away
from the inside wall surface of the container. In the
slice, 12 observation points are selected, among
which the first three points are near the free surface
and the rest are located 100500 mm below the free
surface with even distance of 50 mm. By dividing the
pressure at every point by the maximum pressure,
one can give normalized values to each point.
Figures 5(b) and 6(b) show the variation of thenormalized values
of the 12 points with respect to
the depth. It can be seen from the two figures that
sound fields to the first two vibration modes are
distinct. The sound pressure induced by the first
mode is distributed globally while that by the second
mode is distributed locally. This difference is
attributed to the different radiation directivity of
vibration modes. For the first mode, every point on
the plate vibrates in phase, but for the second mode,
any two points located symmetrically about the
node line vibrates out of phase, resulting in strongdirectivity
in the field.
Fig. 1 The water container, plate and water: (a) topview; (b)
without water (unmeshed); (c) with
water (meshed)
Underwater sound radiation control by active vibration isolation
505
JEME157 Proc. IMechE Vol. 223 Part M: J. Engineering for the
Maritime Environment
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
5/14
The overall experimental system is shown in
Fig. 7. As can be seen, the container is almost full
of water, which contacts the lower surface of the
plexiglass plate. Four active isolators are installed
between the plexiglass plate and an aluminium plate
with dimensions 3006
1806
8 mm. The fan, havingan eccentric mass, is used as a rotary
machine and
supported on the aluminium plate. Its nominal
speed is 2400r/min and the nominal fundamental
frequency is therefore 40Hz. The first natural
frequency of the aluminium plate is about 466 Hz,
much higher than this fundamental frequency as
well as the first natural frequency of the plexiglassplate. The
active isolators are electromagnetic
Table 1 Mechanical properties
Youngs modulus/bulkmodulus (N/m2) Density (kg/m3) Poissons ratio
Sound speed (m/s)
Plexiglass 3.956109 1200 0.35 Water 2.256109 1000 1500
Table 2 Computed and measured natural frequencies of the
plate
No water in the container, active isolators not installed
Computed (Hz) 70.3 134.8 213.5 318.3Measured (Hz) 71.40.5
137.50.5 209.20.5 314.0 0.5
Container filled with water, active isolators not installed
Computed (Hz) 28.3 79.0 85.6 190.6Measured (Hz) 29.00.5 78.40.5
89.20.5 186.2 0.5
Container filled with water, active isolators installed
Measured (Hz) 39.40.5 81.30.5 97.00.5 209.5 0.5
Fig. 2 The first four mode shapes of the plate
506 Z Zhang, X Huang, Y Chen, and H Hua
Proc. IMechE Vol. 223 Part M: J. Engineering for the Maritime
Environment JEME157
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
6/14
actuators. Diameter and height of each actuator are
50 and 40 mm respectively and the first natural
frequency is 66Hz. Natural frequencies of the
plexiglass plate are altered after the installation of
active isolators, which are also measured and listed
in Table 2. The table shows that each natural
frequency becomes larger the first rises to
39.4 Hz, but the second has only a small variation.
Since the first natural frequency is very close to the
fundamental frequency of the fan, the radiated
sound exhibits a strong resonance at this frequency,
as can be observed in the experiment. Theoretically,
not only the natural frequencies but also mode
shapes of the plate will change with the installation
of active isolators, so will the induced sound field.
However, the sound field to the first natural
frequency is similar to that in Fig. 5 because the
plexiglass plate in Fig. 7 can be regarded as a
stiffened one by the actuators and the aluminium
plate.
In the experiment, four accelerometers are in-
stalled beside the active isolators to measure the
responses of the plexiglass plate and one acceler-
ometer on the aluminium plate to measure the
vibration of the fan. Moreover, one sound pressure
transducer is immersed in water to measure the
underwater sound pressure induced by the resonant
vibration of the plexiglass plate. The controller is a
PC with one NI-PCI6259 board inside, which has 32
input channels and 4 output channels.
3 ADAPTIVE METHOD IN ACTIVE VIBRATIONISOLATION
The vibration induced by the rotating eccentric mass
is composed of harmonics. For periodical responses,
the control method adaptive cancellation is an
effective way to counteract the influence of distur-
bance. The adopted adaptive control system is
shown in Fig. 8, where Hs(z) and Hc(z) are the
transfer functions respectively from Fd and Fc to the
vibration acceleration at point S. Fd and Fc represent
respectively the disturbance force and the control
force. In Fig. 8(b), the control force Fc is applied to
cancel the vibration of S induced by the disturbance
force Fd. The reduction of vibration at point S will
result in a decrease of sound radiation from the plate
structure. Adaptation of Fc is realized according to
the vibration of point S, i.e. the error signal. The
adaptive controller is constructed on the FxLMS
algorithm. In the figure, F(z) represents tracking
filters, Hc(z) is the estimate of Hc(z), W(z) the
controller, d(k) the disturbance, e(k) the error signal,
r(k) the reference signal, y(k) the response induced
by u(k).
The discrete transfer function ofF(z)
shown inFig. 8(a) can be described by
Fig. 3 Pressure distribution on the top surface of thewater
Underwater sound radiation control by active vibration isolation
507
JEME157 Proc. IMechE Vol. 223 Part M: J. Engineering for the
Maritime Environment
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
7/14
Fig. 4 The first four mode shapes of the plate (left measurement
points; right mode shapes)
Fig. 5 Sound field to the first vibration mode: (a) a slice of
the sound field (normalized pressure);(b) normalized pressure
versus depth
508 Z Zhang, X Huang, Y Chen, and H Hua
Proc. IMechE Vol. 223 Part M: J. Engineering for the Maritime
Environment JEME157
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
8/14
F z ~ F1 z , F2 z , , Fn z T,
Fi z ~bi0zbi2z
{2
1zai1z{1zai2z{2, i~1*n 1
where ai1~{2exp {fvi=fs
cosffiffiffiffiffiffiffiffiffiffiffiffi
1{f2p
vi=fs
, ai2~
exp {2fvi=fs , bi0~1=2 1{ exp {2fvi=fs , bi25
2bi0, fs is the sampling frequency. In the adaptive
isolation, the centre frequencies vi of F(z) are
estimated by online frequency estimators.
For each adaptive controller Wi(z), the adaptation
of its coefficients can be given by equation (2)according to the
LMS algorithm
wi kz1 ~wi k zmei k
cz ri k k k2ri k
u k ~P
i
wTi k ri k , i~1*n 2
where ri(k) is the output of Hc(z) under the inputri(k), r(k)5
(r1(k),r2(k),...,rn(k))
T, ei(k) the output ofFi(z) under the input e(k), m is an
adjustingparameter, c. 0. However, in this paper, equation(2) is
replaced by a modified formula.
Since the control signal u(k) is the output of W(z)
under the input r(k), and one step update of coeffi-cients of
W(z) given in equation (2) is proportional
Fig. 6 Sound field to the second vibration mode: (a) a slice of
the sound field (normalizedpressure); (b) normalized pressure
versus depth
Underwater sound radiation control by active vibration isolation
509
JEME157 Proc. IMechE Vol. 223 Part M: J. Engineering for the
Maritime Environment
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
9/14
to the filtered error signal ei(k), excessive adaptation
will occur when there is a large shock in the error
signal, which can result in saturation in controlleroutput.
Output saturation can produce high-fre-
quency excitation and even instability, which will
deteriorate vibration isolation. Therefore, the adap-
tation formula in equation (2) should be modified to
consider this circumstance. For an ideal saturation
sat u k ~
d, u k wd
u k , u k j jd
{d, u k v{d
8>: , dw0 3
the following formula can be deduced by solving anoptimization
problem [14]
Fig. 7 Experimental system for active vibration isola-
tion and underwater sound radiation control:(a) photograph; (b)
front view; (c) top view
Fig. 8 Active isolation and the adaptive controlscheme with
tracking filters
510 Z Zhang, X Huang, Y Chen, and H Hua
Proc. IMechE Vol. 223 Part M: J. Engineering for the Maritime
Environment JEME157
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
10/14
wi kz1
~fu wTi k ri k
wi k zmei k
cz ri k k k2ri k
!
4
where fu wTi k ri k
is the derivative of a sigmoid
function f(u) with respect to the variable u. Accord-
ing to the definition of sigmoid functions, as u(k)
approaches saturation, fu wTi k ri k
decreases fast
to zero and consequently reduce the adaptation
step of wi(k). This property guarantees that
fu wTi k ri k
is able to weaken any excessive
updating of wi(k) and alleviate output saturation.
Moreover, equation (4) can degrade to equation (2)
as long as no output saturation occurs.
4 EXPERIMENTAL RESULTS
Figure 9 is the measured fundamental frequency of
the fan, which indicates that the rotation speed is
not constant but oscillates between 40.5 and 41.1 Hz.
In the figure, there are 4800 samples in total,
corresponding to a 12 s record under the sampling
frequency 400 Hz. Therefore, the oscillation fre-
quency of the speed is very small as compared with
the fundamental frequency. The given adaptive
algorithm with real-time tracking filters is not
sensitive to the variation of speed, which can
guarantee a large attenuation of quasi-periodical
vibrations even under unsteady excitation.
Transfer functions from the control voltage to the
local acceleration responses at the four active
isolators are measured for further implementation
of active isolation. Figure 10 gives the measured
frequency response functions (FRFs), and the FRF
from the control voltage of the second active isolator
to the measured sound pressure at point 4 (marked
in Figs 5 and 6) is also shown for comparison. The
following conclusions can be drawn from these
measured curves.
1. FRFs of the four active isolators are almost the
same except at the natural frequencies.2. In the
pressure/voltage curve, all peaks corre-
spond to the natural frequencies of the plate as
well as the active isolators, and at the observation
point, sound pressure induced by the second
mode (at 81 Hz) is stronger than the other three
modes of the plate.
3. When excited by white noise, natural vibration of
the active isolators will create higher sound
pressure than the first four modes of the plate,
which implies that the natural vibration should be
damped in the implementation of active isolation.
With the measured FRFs of active isolators and the
adaptive control structure shown in Fig. 8, active
control is implemented and each active isolator
generates cancelling forces according to the local
vibration accelerations to counteract vibration
caused by the rotating fan and the corresponding
radiated sound. Since the excitation of the fan is
mainly composed of vibration at the fundamental
frequency and forces the plate to vibrate resonantly
at its first natural frequency, the spectrum of
radiated sound from the plate at the fundamental
frequency is dominant when no control is imple-mented. After
active control, the radiation at the
fundamental frequency is suppressed substantially,
as shown in Fig. 11, where the spectrum at the first
natural frequency of the isolator (about 66 Hz) is
raised to some extent. In the resonant condition, the
pressure at those points shown in Fig. 5 was
measured and the results are given in Table 3, from
which one can see that the trend implied by the
pressure-depth data is similar to that shown in
Fig. 5.
Figure 12 gives the acceleration responses at the
foot of the second active isolator before and after
Fig. 9 The fundamental frequency of the fan
Underwater sound radiation control by active vibration isolation
511
JEME157 Proc. IMechE Vol. 223 Part M: J. Engineering for the
Maritime Environment
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
11/14
active isolation respectively, from which it can be
seen that vibration at the fundamental frequency
(around 40.8 Hz) is suppressed by 90 per cent, but
increases at the second and the fifth harmonic
frequencies (near 81, 205 Hz), and clearly rises at
the first natural frequency of the isolator (about66 Hz).
Comparing Fig. 12 with Fig. 11, it can be seen
that the spectra of sound pressure at the second and
fifth harmonic frequencies keep almost the same
except at around 66 Hz, which increases by almost
20 dB. Nevertheless, the total vibration and sound
are attenuated by a large percentage. The reason for
this phenomenon is that the radiated sound field atabout 81 or
205 Hz has strong directivity and the
Fig. 10 Measured FRFs of the control channels: (a) acceleration
versus voltage; (b) pressureversus voltage
512 Z Zhang, X Huang, Y Chen, and H Hua
Proc. IMechE Vol. 223 Part M: J. Engineering for the Maritime
Environment JEME157
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
12/14
measurement point is not in the radiation direction,
which renders the measured sound pressure insen-
sitive to the variation of vibration of the plate. The
directivity is closely related to forced vibration
modes of the plate, and the two vibration modes at
81 and 205 Hz are actually similar to those given in
Fig. 5.
5 CONCLUSION
Active vibration isolation and sound radiation of an
experimental system with fluidstructure interaction
are discussed. The vibration characteristics of the
plate coupled with water in a plexiglass container areanalysed
by the FEM and validated by modal testing,
which forms a base for the explanation of controlled
sound radiation in the water container. Active
vibration isolation is realized on the basis of an
adaptive algorithm with embedded tracking filters
that are used to ensure the control process insensi-
tive to the fluctuation of vibration frequencies. Four
actuators operate independently to cancel local
vibrations at each active isolator. The vibration and
radiated sound at the fundamental frequency are
suppressed substantially after active isolation. At
certain high-order harmonic frequencies, vibration
of the plate increases but results in indiscernible
change in sound pressure. The radiated sound field
is closely related to vibration modes, those modes ofstrong
directivity in radiation induce only local
Fig. 11 Sound pressure before and after control (Ref5161026 Pa
and depth 5 500 mm):(a) time domain responses: (b) spectra
Table 3 Sound pressure at different locations (Hanning window
and linear average)
No. 1 2 3 4 5 6 7 8 9 A B C
Depth (mm) 5 10 25 100 150 200 250 300 350 400 450 500Sound
pressure (Pa) 3.4 10.2 29.8 97.9 103.3 102.1 102.9 103.9 101.6
101.2 99.6 99.0
Underwater sound radiation control by active vibration isolation
513
JEME157 Proc. IMechE Vol. 223 Part M: J. Engineering for the
Maritime Environment
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
13/14
radiation, having weak influence on the sound
pressure at locations away from the radiation
direction, which usually cause a discrepancy in the
attenuation of vibration and sound at certain
harmonic frequencies after active isolation.
ACKNOWLEDGEMENT
This work was fully supported by the NSF of China(Grant No.
10672099).
F Authors 2009
REFERENCES
1 Lee, H. K. and Park, Y. S. A near-field approach toactive
control of sound radiation from a fluid-loaded rectangular plate.
J. Sound Vibr., 1996,196(5), 579593.
2 Li, S. and Zhao, D. Numerical simulation of activecontrol of
structural vibration and acoustic radia-
tion of a fluid-loaded laminated plate. J. SoundVibr., 2004,
272, 109124.
3 Carra, S., Amabili, M., Ohayon, R., and Hutin, P.M. Active
vibration control of a thin rectangularplate in air or in contact
with water in presence oftonal primary disturbance. Aerospace Sci.
Technol.,2008, 12(1), 5461.
4 Winberg, M., Hansen, C., Claesson, I., and Li, X.
Active control of engine vibrations in a collins classsubmarine.
Blekinge Institute of Technology Re-search, Report No. 2003:11.
5 Daley, S., Johnson, F. A., Pearson, J. B., andDixon, R. Active
vibration control for marine appli-cations. Control Engng Practice,
2004, 12(4), 465474.
6 Daley, S., Hatonen, J., and Owens, D. H. Activevibration
isolation in a smart spring mount usinga repetitive control
approach. Control EngngPractice, 2006, 14(9), 991997.
7 Everstine, C. G. and Henderson, F. M. Coupledfinite
element/boundary element approach for
fluid-structure interaction. J. Acoust. Soc. Am.,1990, 87(5),
19381946.
Fig. 12 Acceleration responses with and without control: (a)
time domain responses; (b) spectra
514 Z Zhang, X Huang, Y Chen, and H Hua
Proc. IMechE Vol. 223 Part M: J. Engineering for the Maritime
Environment JEME157
at UNIV OF NEW SOUTH WALES on August 9,
2011pim.sagepub.comDownloaded from
http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/http://pim.sagepub.com/
-
8/6/2019 Underwater Sound Radiation Control by Active Vibration
Isolation an Experiment
14/14
8 Yu, G. Y. Symmetric collocation BEM/FEM cou-pling procedure
for 2-D dynamic structural-acous-tic interaction problems. Comput.
Mechanics, 2002,29, 191198.
9 Zhang, Z., Chen, Y., Yin, X., and Hua, H. Active
vibration isolation and underwater sound radiationcontrol. J.
Sound Vibr., 2008, 318(4-5), 725736.10 Elliott, S. J., Stothers, I.
M., and Nelson, P. A. A
multiple error LMS algorithm and its application tothe active
control of sound and vibration. IEEETransactions on Acoustics,
Speech, and SignalProcessing, 1987, 35(10), 14231434.
11 Kim, S. and Park, Y. Active control of multi-tonalnoise with
reference generator based on on-linefrequency estimation. J. Sound
Vibr., 1999, 227(3),647666.
12 Mazeaud, B. and Galland, M. A. A multi-channelfeedback
algorithm for the development of activeliners to reduce noise in
flow duct applications.
Mech. SystemsSignal Process., 2007, 21(7), 28802899.
13 Teel, A. R., Zaccarian, L., and Marcinkowski, J. J.An
anti-windup strategy for active vibration isola-tion systems.
Control Engngg Practice, 2006, 14(1),1727.
14 Wang, J. Theoretical and experimental study ofactive
vibration isolation with an adaptive algo-rithm, Masters Thesis,
Shanghai Jiaotong Univer-sity, 2008.
15 Fahy, F. and Gardonio, P. Sound and structuralvibration, 2nd
edition, 2007 (Academic Press,Boston).
APPENDIX
Notation
ai1, ai2, bi0,
bi0, bi2
coefficients of the ith tracking
filterd(k) disturbance
e(k) error signal
fs sampling frequency
f(u) sigmoid function
Fd, Fc disturbance force, control force
F(z)5 (F1(z),
F2(z),...,Fn(z))T
tracking filters
Hc(z), Hs(z) transfer functions
Hc(z) estimate of Hc(z)
r(k)5 (r1(k),
r2(k),...,rn(k))T
reference signals
u(k) control signal
wi(k) weight vector of the ith controller
W(z)5 (w1(z),
w2(z),...,wn(z))T
controller
y(k) response signal induced by u(k)
ei(k) output of Fi(z)
m, c. 0, d. 0 scalar variables
ri(k) output of Hc(z)
vi centre frequency
Underwater sound radiation control by active vibration isolation
515
JEME157 Proc. IMechE Vol. 223 Part M: J. Engineering for the
Maritime Environment