Embed Size (px)
Citation preview

OPTIMAL CONTROL APPLICATIONS AND METHODSOptim. Control Appl. Meth. 2009; 30:287–308Published online 23 October 2008 in Wiley InterScience (www.interscience.wiley.com). DOI: 10.1002/oca.864
Tuning a dynamic inversion pitch axis autopilot usingMcFarlane–Glover loop shaping
George Papageorgiou∗,† and Michal Polansky
Honeywell, Spielberk Office Centre, Holandska 4, Brno 639 00, Czech Republic
SUMMARY
Honeywell and others have successfully applied dynamic inversion control to many flight control problems.It is a simple and systematic design procedure that guarantees nominal performance. However, unlikeH∞ methods, it does not provide any robustness guarantees. In this paper, we propose a procedure fordesigning a linear time-invariant dynamic inversion autopilot with guaranteed robustness. We will usethe generalized stability margin to choose the dynamics that will be inverted (A and B matrices), andMcFarlane–Glover loop shaping to select the C matrix of the inverted plant, the desired dynamics, anda robust state estimator. The proposed procedure is illustrated by designing a pitch axis autopilot thatachieves robust performance with a number of Boeing 747 aircraft models. Copyright q 2008 John Wiley& Sons, Ltd.
Received 25 November 2007; Revised 8 July 2008; Accepted 24 July 2008
KEY WORDS: robust performance; H∞ control; McFarlane–Glover loop shaping; generalized stabilitymargin; dynamic inversion control; flight control
1. INTRODUCTION
Dynamic inversion (DI) control [1, 2] and McFarlane–Glover loop shaping [3, 4] are two verypopular and powerful controller design techniques. They both enjoy much support from the controlscommunity, they have both been evaluated by researchers and practicing engineers, and they haveboth been successfully flight tested.
However, they are the result of different philosophies. DI control is the product of time-domainthought, and McFarlane–Glover loop shaping is the product of frequency-domain thought, wherethe plant model uncertainty can be naturally and systematically treated. Therefore, DI control
∗Correspondence to: George Papageorgiou, Honeywell, Spielberk Office Centre, Holandska 4, Brno 639 00, CzechRepublic.
†E-mail: [email protected]
Contract/grant sponsor: Honeywell Internal R&D
Copyright q 2008 John Wiley & Sons, Ltd.

288 G. PAPAGEORGIOU AND M. POLANSKY
comes with performance guarantees but no robustness guarantees, and McFarlane–Glover loopshaping comes with many meaningful robustness guarantees.‡
Within the flight controls community DI control is more popular than McFarlane–Glover loopshaping (this is especially true in the United States). What is attractive about DI control is thatit is conceptually simple, it has many similarities with classical control, and it naturally handlesnonlinear systems, resulting in self-scheduled controllers. In most cases, the lack of robustnessguarantees is compensated by rules-of-thumb for achieving robustness developed over many appli-cations. On the other hand, two decades after the solution to the H∞ control problem waspublished, Ricatti equations and H∞ control are largely unknown among production engineers.
Recently, we came across a flexible launch vehicle control problem where it was challengingto design a good performance DI controller [2]. For flexible plants, the state feedback and stateestimator problems seem to be tightly coupled, and design of the state feedback matrix withoutconsideration of the state estimator seems to result in poor performance and robustness.
In this paper, we propose a very elegant and simple procedure for tuning a DI controller. Alldevelopments will be for single-input single-output (SISO), linear time-invariant (LTI) plants ofrelative degree one. Preliminary results indicate that the tuning procedure can be extended toplants with relative degree greater than one and to multi-input multi-output (MIMO) plants. Sucha tuning procedure will enable systematic design of DI controllers for flexible plants and willalso enable the development of a systematic DI controller design procedure that could potentiallyreduce controller design cycles.
Tuning a DI controller usingH∞/� or linear quadratic (LQ) control is not a new idea. In [5] theauthors designed the desired dynamics of a DI controller using �-synthesis, in [6] the authors usedH∞ synthesis, and in [7] LQ control was used. McFarlane–Glover loop shaping has also beenused to improve or guarantee the robustness of a DI controller. In [8] a DI controller is augmentedwith a phase-lead filter to improve robustness, and in [2] the authors use McFarlane–Glover loopshaping and convex optimization to tune the desired dynamics. However, the first solution resultsin a high-order controller and the second solution is computationally expensive as the optimizationboils down to a system of linear matrix inequalities.
This paper is organized as follows. In Sections 2 and 3 we give overviews of DI control andMcFarlane–Glover loop shaping, respectively. The tuning procedure, which is the main result ofthis paper, is presented in Section 4. In Section 5, we apply the tuning procedure to a representativepitch axis control problem. Finally, conclusions are given in Section 6.
2. DI CONTROL
In this section, we will briefly introduce DI control. For more details on DI control see [1, 2] andreferences therein.
A DI controller can be thought of as having two loops: an inner loop referred to as the inversionand an outer loop referred to as the desired dynamics. The objective of the inversion is to invertthe plant dynamics and to make the inner closed-loop transfer function equal to an integrator (fora plant of relative degree one) or a chain of integrators (for a plant of relative degree greater than
‡Why care about guarantees? Guarantees are important because they can be used to develop systematic designprocedures and reduce design cycles.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 289
Figure 1. A novel DI controller; the novelty is in the model that is used to derive the inversion.
one). The objective of the desired dynamics is to set the desired closed-loop performance androbustness. For a plant model of relative degree one, the first step in the derivation of the inversionis to differentiate the controlled variable once. Consider, for example, an SISO LTI plant modelP=[A, B,C,0] of relative degree one.§ The first step in the derivation of the inversion is
y =Cx⇒y =Cx=CAx+CBu (1)
where x ∈Rn is the plant model state, u∈R is the control input, and y∈R is the controlled variable.The second step in the derivation of the inversion is to set y equal to the output of the desireddynamics and to solve for u, i.e.
y= yd⇒[from (1)]CAx+CBu= yd⇒u=(CB)−1(−CAx+ yd) (2)
where yd∈R is referred to as y dot desired and is the output of the desired dynamics. Thus, in theabsence of plant model uncertainty, inversion (2) inverts the plant dynamics and makes the transferfunction from yd to y (with zero initial conditions) equal to an integrator. Since P is SISO and ofrelative degree one, CB is a non-zero scalar. For MIMO plants, CB is not necessarily square andinvertible. How to invert CB in the general case is the subject of the so-called control allocation[9]. There are many choices for the desired dynamics. A typical choice, depicted in Figure 1, is
xi = Kb fi(yc− y)
yd = Kb(xi+ fcyc− y)
(3)
§A transfer function with state-space realization [A, B,C,D] is of relative degree greater than or equal to one if,and only if, D=0.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

290 G. PAPAGEORGIOU AND M. POLANSKY
where yc is the commanded output and xi is the integrator state. Therefore, in the absence of plantmodel uncertainty and for zero initial conditions,
y=Kb(xi+ fcyc− y)⇒
y+Kb y=Kb xi+Kb fc yc⇒
[from (3)]y+Kb y+K 2
b fiy=Kb fc yc+K 2
b fiyc⇒
(choose fc+ fi
fc=1
)
(s+Kb fc)
(s+Kb
fifc
)y=Kb fc
(s+Kb
fifc
)yc⇒
y
yc= Kb fc
s+Kb fc(4)
where s is the Laplace operator.Unlike anH∞/� controller, a DI controller does not guarantee nominal stability (NS) and comes
with no robustness guarantees. With reference to the above example, (4) is the only guaranteeprovided by DI control. Note that the lack of robustness guarantees does not imply that DI controlis inherently not robust. Guarantees are important because they can help reduce the amount ofcontroller analysis and controller re-design required in order to meet the closed-loop requirements.
Also, as can be seen from (2), a DI controller requires a state measurement. Therefore, if acomplete state measurement is not available, then a state estimator needs to be designed. For mostaerospace applications, designing a robust state estimator is typically straightforward, e.g. by usingcomplementary or Kalman filtering techniques. However, for a plant with lightly damped polesand/or zeros, e.g. a flexible launch vehicle, it could be a more challenging task [2].
Consider the novel DI controller illustrated in Figure 1. To meet the closed-loop requirements,the designer has the following degrees of freedom:
1. The controlled variable (y).2. The desired dynamics. It is typical to choose the desired dynamics with a proportional path,
an integral path, and a command path.3. The inverted model, i.e. the model that is used to derive the inversion. The inverted model,
also referred to as the On-Board AirCraft (OBAC) model in aerospace applications, has thesame dynamics (A and B matrices) as the nominal plant model P but could have a differentC matrix. The C matrix of the inverted model, denoted by C , can be used to improve therobustness and is a non-standard tuning parameter introduced in this paper.¶ Typically, it issufficient to choose C=C . Note that if C �=C , then the transfer function from yd to y willnot be equal to an integrator.
¶Another way to affect achieved robustness not explored in this paper is to partially invert the dynamics of thenominal plant.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 291
Figure 2. The four ‘gains’ of a typical DI controller.
In Figure 2 we have redrawn Figure 1 to highlight the four ‘gains’ of a typical DI controller: aproportional gain, an integral gain, a command gain, and a state feedback gain.
Multiple aerospace applications of DI control have resulted in rules-of-thumb for achieving ahigh performance and robust closed-loop system. Some of these design guidelines for choosingthe controlled variable, the desired dynamics, and the OBAC are presented in [2, 10]. The lack ofguarantees, that was mentioned above, is compensated by the existence of these design rules.
Honeywell and others have been very successful in applying DI control to a variety of aerospacevehicles, e.g. [11–16] and reference therein. Some of the vehicles that Honeywell has worked withare: the F-18 HARV [1], the X-38 CRV [17], various business jets, the NASA Boeing 757 [18],the X-45 J-UCAV, the DARPA ducted fan MAV, a Yamaha RMAX helicopter [19], and a flexiblelaunch vehicle [2]. It is also worth noting that Honeywell sells DI autopilots. Based on our richexperience with DI control, which ranges from desktop simulations all the way to flight testing andcertification, we believe that DI control for aerospace vehicles is a very mature controller designtechnique.
3. MCFARLANE–GLOVER LOOP SHAPING
In this section, we will give a brief overview of McFarlane–Glover loop shaping that is also referredto in the literature as H∞ loop shaping. For more details on McFarlane–Glover loop shaping see[3, 4] and references therein.
As in the previous section, consider an SISO LTI plant model P . Define the generalized stabilitymargin of the standard feedback interconnection between a plant model P and a controller Cas [20]‖
b(P,C) :=∥∥∥∥∥[P
1
](1−CP)−1[−C 1]
∥∥∥∥∥−1
∞=min
�
|1−CP|√1+|P|2√1+|C |2 ( j�)
It is proved in [21] that 0�b(P,C)�1. The larger the value of the generalized stability margin,the more robust the feedback interconnection.
Consider the standard McFarlane–Glover loop shaping block diagram depicted in Figure 3.McFarlane–Glover loop shaping has two steps. In the first step, the designer specifies the desired
‖We will use C to denote both a controller and the C matrix of a nominal plant. The meaning of C will becomeapparent from the context.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

292 G. PAPAGEORGIOU AND M. POLANSKY
Figure 3. The standard McFarlane–Glover loop shaping block diagram.
closed-loop performance by pre- and/or post-compensating (so-called shaping) the plant model Pwith frequency-dependent weights W1 and W2, respectively (the choice of weights can be guidedby the principles of classical loop shaping [22]). The second step is to synthesize anH∞ controllerthat maximizes the robustness of the desired closed-loop performance specified in the first step.This is done by solving the following H∞ maximization (e.g. by using the Matlab commandncfsyn [23]), which corresponds to a generalized stability margin maximization:
maxstab C∞
‖Tw→z‖−1∞ = maxstab C∞
b(Ps,C∞)=� (5)
where stab is short for stabilizing, w=[w1 w2]T, z=[z1 z2]T, Ps=W2PW1 is the so-calledshaped plant, and � is the achieved generalized stability margin. Note that the second step ofMcFarlane–Glover loop shaping does not undo the first step because if � is sufficiently large, thenC∞ will not significantly modify Ps at frequencies where |Ps| is much larger or much smallerthan unity [24], i.e. at those frequencies |PsC∞|≈|Ps|. Therefore, C∞ effectively only adjusts thephase of Ps at frequencies where |Ps| is close to unity to improve robustness.
The implemented controller, i.e. the controller that is used to control the real plant, is C=W1C∞W2. Therefore, part of the implemented controller is chosen directly by the designer (W1and W2) and part of it comes from the H∞ maximization (C∞). The McFarlane–Glover loopshaping controller is the only H∞ controller that can be expressed as an observer with statefeedback [20, 25]. This observer structure is illustrated in Figure 4. Also note that unlike a DIcontroller, the McFarlane–Glover loop shaping controller is an output feedback controller, i.e. itincludes a state estimator.
The achieved generalized stability margin � guarantees that the loop transfer function PC doesnot enter a region about the −1 point of its Nyquist plot or equivalently the (0,−180◦) point of itsNichols plot [26, 27]. From this guaranteed exclusion region, it is easy to compute the followingguarantees (also reported in [20]) for the upper gain margin, the lower gain margin, and the phasemargin:
GM�1+�
1−�, GM�1−�
1+�, PM�2 arcsin � (6)
Therefore, for example, �=0.4 guarantees that
GM�7.3dB, GM�−7.3dB, PM�43.5◦
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 293
Figure 4. The McFarlane–Glover loop shaping controller can be expressed as a shaped plant observerwith state feedback. The command pre-filter is a free parameter that in this paper is chosen to be
W2. Note that [As, Bs,Cs,0] is the state-space realization of Ps.
suggesting that �=0.4 is a modern counterpart of the decade old ‘6dB and 45◦’ rule-of-thumb forthe gain and phase margins. Note that the exclusion region guarantee also holds for single-loopanalysis of an MIMO closed-loop system [27].
In the general case, H∞ controller synthesis boils down to solving two coupled Ricatti equa-tions. For McFarlane–Glover loop shaping though, the controller synthesis problem, given by (5),decouples into three steps [21, 24]. The first step, a normalized LQ problem, inputs Ps and outputsthe state feedback matrix F in Figure 4. The LQ problem solved is
minz2∈L2[0,∞)
∫ ∞
0(z21+z22)dt (7)
where z1= Psz2 (see Figure 3). The second step is to compute � (e.g. by using the Matlab commandncfsyn [23]) and this step also depends only on the shaped plant. The third step inputs Ps, F ,and � and outputs the observer gain matrix L in Figure 4. Therefore, the first and second stepsare independent and depend only on the shaped plant. However, the third step depends on F (firststep) and � (second step), and corresponds to synthesis of an H∞ observer with the knowledgeof the state feedback matrix.
The McFarlane–Glover loop shaping controller comes with a number of guarantees, some ofwhich are listed below. NS is guaranteed by synthesis since maximization (5) is over all stabilizingcontrollers. There are a number of nominal performance guarantees that are valid frequency byfrequency [24]:
|Tyc→y |= |Ps|√1+|Ps|2
, |Tyc→u |= |W1W2|√1+|Ps|2
, |Td→y |�1
�
1√1+|Ps|2
(8)
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

294 G. PAPAGEORGIOU AND M. POLANSKY
Note that the first two guarantees depend only on the shaped plant.∗∗ A powerful robust stability(RS) guarantee that quantifies how the generalized stability margin degrades in the presence ofuncertainty is [20]
arcsin b(W2P�W1,C∞)�arcsin �−arcsin ��(Ps,W2P�W1) (9)
where P� is a perturbed plant model (note that � denotes any type of uncertainty), b(W2P�W1,C∞)
is the generalized stability margin of W2P�W1 in feedback with C∞ for which (6) also holds, and��(·, ·) denotes the �-gap metric [20]. The �-gap metric between two plants P1 and P2 is defined as
��(P1, P2) :=max�
|P1−P2|√1+|P1|2
√1+|P2|2
( j�)
and is a measure of the difference between two plants from a feedback perspective, i.e. howdifferent two plants behave when in feedback with the same controller (it can be computed usingthe Matlab command gapmetric [23]). A robust performance (RP) guarantee from [20] is
‖�Tyc→y‖∞� ��(Ps,W2P�W1)
sin[arcsin �−arcsin ��(Ps,W2P�W1)] (10)
where �Tyc→y denotes the difference in the transfer function from yc to y when P is replaced byP�. It should be apparent that the larger the value of �, the larger the left-hand side of (9) and thesmaller the left-hand side of (10). Therefore, � is a measure of both RS and RP.
In order to meet the closed-loop requirements, the designer has the following degrees of freedom:
1. The plant model (P) used for controller synthesis.2. The frequency-dependent weights (W1 and W2).
McFarlane–Glover loop shaping has successfully flown on the QinetiQ VAAC Harrier aircraft[28, 29], on the Canadian NRC Bell 205 helicopter [30], and more recently on a Yamaha RMAXrobotic helicopter [31]. Based on our experience with McFarlane–Glover loop shaping, whichranges from desktop simulations all the way to flight testing, we believe that McFarlane–Gloverloop shaping for aerospace vehicles is an attractive controller design technique.
4. TUNING A DI CONTROLLER USING MCFARLANE–GLOVER LOOP SHAPING
In this section, we will show how to tune the DI controller illustrated in Figure 1 using McFarlane–Glover loop shaping.
We will consider an SISO LTI plant model P of relative degree one. Preliminary results indicatethat the tuning procedure can be extended to plants with relative degree greater than one and toMIMO plants, but not all the formulae stated in this section will be the same. The tuning procedureis built on the three-step solution of McFarlane–Glover loop shaping described in the previous
∗∗A tighter version of the third guarantee is derived in [20].
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 295
section and its steps are:
1. With respect to Figure 3, set W1=1 and shape the plant model P with W2=Kp+Ki/s. Theproportional gain is used to specify the desired rise time and the ratio of the two gains isused to specify the desired settling time.
2. Solve the normalized LQ problem (7). Denote the resulting state feedback matrix by F=[Fi Fx ], where Fi multiplies the integrator state of W2 and Fx multiplies the state or stateestimate of P .
3. Choose Kb, and compute C, fi, and fc (the remaining parameters in Figure 1) from Fx ,Ki,and Kp. Since Kb does not affect the achieved feedback properties, it is chosen to normalizeone of the elements of C .
4. If a state estimator is required, i.e. a complete state measurement is not available, thencompute �. If �<0.4, then go back to Step 1 and modify the integral and/or proportionalgains. First try reducing the ratio of the two gains to reduce the phase lag around cross-over. If this is not sufficient, then reduce the proportional gain. If ��0.4, then compute theMcFarlane–Glover loop shaping observer gain matrix or design a state estimator using someother method.
Through a sequence of block diagram manipulations, we will now show how Fx and the twogains of W2 map to the four gains of the DI controller illustrated in Figure 2 (Step 3 of the tuningprocedure). Start with Figure 4 and set W1=1 and W2 equal to a proportional and integral filterand remove the state estimator. The resulting block diagram is depicted in Figure 5. Note that uand z1 are the input and output of the shaped plant, respectively. Removing the proportional pathof the post-compensator and expanding the command pre-filter results in Figure 6. Consider thefollowing lemma that will be stated without proof.
Lemma 1Given an SISO plant model P of relative degree one and with P( j0) �=0. Solve the normalizedLQ problem (7) with Ps=(Kp+Ki/s)P . If a solution exists, then
F2i =1, Tyc→y( j0)Fi=−1, det(A+BFx ) �=0
Assuming, without loss of generality, that Fi=−1, then Figure 6 can be redrawn as Figure 7 that isvery similar in structure to Figure 2.†† By equating the gains of Figures 7 and 2, we can computethe desired DI parameters. Since y=Cx ,
Fx = (C B)−1(−C A−KbC)⇒C BFx = −C A−KbC⇒
[det(A+BFx ) �=0 from Lemma 1]C = −KbC(A+BFx )
−1
††If Fi=1, then multiply Tyc→y by −1.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

296 G. PAPAGEORGIOU AND M. POLANSKY
Figure 5. Step 1 of the block diagram manipulations.
Figure 6. Step 2 of the block diagram manipulations.
Figure 7. Final step of the block diagram manipulations.
and
fc= C BKp
Kb, fi= C BKi
K 2b
Recall from Section 3 that the gain of the transfer function from yc to y is equal to
|Tyc→y |= |W2P|√1+|W2P|2
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 297
This simple equation can guide the designer when choosing the proportional and integral gains ofW2 in Step 1. From LQ theory [32], the stability margins at the plant input u are guaranteed to be
GM=∞, GM�−6dB, PM�60◦
The controller in Step 3 will provide these robustness guarantees. If a state estimator is added, thenthe degradation of these stability margins could be arbitrarily bad [33]. If, however, the McFarlane–Glover loop shaping state estimator is used, or an estimator ‘close’ to the McFarlane–Glover loopshaping state estimator (Step 4), then the designer can expect robustness margins ‘close’ to (6).
5. DESIGN EXAMPLE
In this section, we will apply the tuning procedure outlined in the previous section to an aircraftpitch axis control problem. Through this example, we will demonstrate that the tuning procedureis systematic and that it results in good performance controllers.
5.1. The aircraft short period dynamics
The short period (pitch axis) dynamics of an aircraft can be accurately approximated by[�
q
]=
[Z� 1
M� Mq
][�
q
]+
[0
M�
]� (11)
where � is the angle of attack, q is the pitch rate, � is the elevator angle, and Z�,M�,Mq , and M�are parameters that depend upon the aircraft and the flight condition. The corresponding transferfunctions are
q
�= M�(s−Z�)
s2−(Z�+Mq)s+(Z�Mq −M�),
�
q= 1
s−Z�
Typically, the short period poles are complex, and if this is the case, then from the first transferfunction the short period natural frequency �sp and the short period damping �sp are
�sp=√Z�Mq −M�, �sp=− Z�+Mq
2�sp
5.2. Problem statement
We will be working with 12 LTI Boeing 747 models summarized in Tables I and II. The aircraftmodels, referred to as TRue AirCraft (TRAC) models, have been generated by trimming andlinearizing a high-fidelity nonlinear model of the Boeing 747 [34]. All 12 models are at approxi-mately the same dynamic pressure but for different combinations of Mach number, altitude, mass,and center-of-gravity location. For each model in Table I, we state its number together with itsshort period natural frequency and damping. Therefore, for example, model #4 has a short periodnatural frequency of 1.34 rad/s and a short period damping of 0.75. Also, it corresponds to a lightand aft loaded configuration that is flying at low altitude.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

298 G. PAPAGEORGIOU AND M. POLANSKY
TableI.Sh
ortperiod
naturalfrequencyanddamping
forthe12
Boeing747modelsused
intheexam
ple.
M,h,q
W,CG
0.85
,40
kft,9.5kP
a0.66
,30
kft,9.2kP
a0.52
,20
kft,8.8kP
a0.39
,5kft,9.0kP
a
Light
/aft
160ton,
33%
#1:
1.26
rad/s,
0.51
#2:
1.12
rad/s,
0.62
#3:
1.18
rad/s,
0.67
#4:
1.34
rad/s,
0.75
Mid
/mid
250ton,
25%
#5:
0.98
rad/s,
0.44
#6:
1.01
rad/s,
0.46
#7:
1.07
rad/s,
0.49
#8:
1.18
rad/s,
0.56
Heavy
/forw
ard
350ton,
12%
#9:
0.54
rad/s,
0.66
#10
:0.83
rad/s,
0.45
#11
:0.91
rad/s,
0.45
#12
:0.97
rad/s,
0.52
TableII.Sh
ortperiod
parametersforthe12
Boeing747modelsused
intheexam
ple.
#1
#2
#3
#4
#5
#6
#7
#8
#9
#10
#11
#12
Z�
[s−1]
−0.566
−0.688
−0.806
−1.057
−0.362
−0.438
−0.512
−0.666
−0.259
−0.313
−0.344
−0.436
M�
[s−2]
−1.164
−0.776
−0.765
−0.789
−0.774
−0.809
−0.873
−0.947
−0.169
−0.555
−0.661
−0.693
Mq
[s−1]
−0.718
−0.702
−0.771
−0.945
−0.505
−0.489
−0.535
−0.653
−0.457
−0.436
−0.474
−0.577
M�
[s−2]
2.22
32.37
12.14
91.91
21.57
21.67
11.51
51.34
91.41
21.50
21.36
21.21
2
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 299
Autopilots are typically scheduled on dynamic pressure. During autopilot design, aircraft modelsare grouped together according to q, and models with a similar q are used to design a single LTIautopilot. The last step in the autopilot design process is to schedule the resulting autopilots withdynamic pressure.
Since q is approximately the same for all models, all models will be associated with one flightcondition. The problem statement for this example is to design a single LTI controller that meetsthe desired closed-loop requirements with all 12 Boeing 747 models.
We will be controlling pitch rate. Typical requirements are maximum rise time, RS as capturedby a Nichols chart exclusion region, maximum overshoot, minimum damping, and disturbancerejection. In this example, we will consider a maximum rise time of 1 s and RS as defined by theNichols chart exclusion region given in Figure 14.
In the design and analysis of the pitch axis controller, we will be using two first-order elevatormodels:
�
�c= �
s+�
where �∈{5,10} rad/s.
5.3. Pitch axis DI with state estimation control
In this subsection, we will describe a controller that we will compare with our tuned DI controller.Consider DI control of the pitch axis dynamics of an aircraft without a measurement of the angle ofattack. The lack of an � measurement is typical for a civil aircraft. Choose the controlled variableto be q and compute the inversion using the short period model (11):
�= 1
M�(−M��−Mqq+ qd)
where � is the angle-of-attack estimate. Choose a simple � estimator motivated by the pitch axisdynamics (11):
˙�= Z��+q
Also choose desired dynamics with proportional, integral, and command paths. The resultingcontroller, referred to as a dynamic inversion with state estimation (DISE) controller [2], is illus-trated in Figure 8.
In the absence of plant model uncertainty and disturbances,
fc+ fifc
=1⇒ q
qc= Kb fc
s+Kb fc
5.4. The three controllers
We will be comparing three controllers:
1. A DISE controller designed with Kb=4, fc=0.5, and fi=0.25.2. A McFarlane–Glover loop shaping controller designed with W1=1 and W2=Kp+Ki/s. The
zero of W2 is set to 2 rad/s and the proportional gain is computed such that |W2P|=1 at
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

300 G. PAPAGEORGIOU AND M. POLANSKY
3 rad/s (i.e. the cross-over frequency is larger than the short period natural frequency), whereP is the plant model used for controller design.
3. A tuned DISE controller (see Figure 1) with Kb, C, fi, and fc computed using the proposedtuning procedure. We use the same weights as those used to design the McFarlane–Gloverloop shaping controller and the angle-of-attack estimator is the same as the DISE controller’s� estimator.
Figure 8. Dynamic inversion pitch rate control with angle-of-attack estimation.
0 2 4 6 8 10 120.58
0.585
0.59
0.595
0.6
0.605
0.61Comparison of epsilon for all TRACs
TRAC
epsi
lon
Tuned DISEHinfDISE
Figure 9. The generalized stability margin achieved by the three controllers with all 12 TRACs. The circledenotes which TRAC is used as the OBAC.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 301
Given F=[FI F� Fq ], the state feedback matrix from the LQ optimization (7), the parametersKb, C, fc, and fi of the tuned DISE controller can be computed from the following equations:
Kb=−M�Fq −Mq + F�M�+M�
Z�, C=
[− F�M�+M�
Z�1
], fc= Kp
KbM�, fi= Ki
K 2b
M�
where Kb has been chosen so that the element of C that multiplies pitch rate is equal to 1.
5.5. Selecting an OBAC
In this subsection, we will discuss how to select an OBAC from a group of TRACs. The processhas three steps:
1. Design a controller using every TRAC in the group, i.e. design 12 controllers. Also, designa W2 using every TRAC in the group and associate the weight with the controller.
2. For every TRAC and controller pair, compute the generalized stability margin, i.e. create a12×12 table. To compute the generalized stability margin, use the W2 associated with thecontroller.
3. Select the controller that does the best with all TRACs, i.e. compute the worst � foreach controller over all TRACs and select the controller with the best worst-case perfor-mance. The TRAC that was used to design the best performance controller is named as theOBAC.
If the servo and actuator models are known, then we can use that information in the selectionof the OBAC. In this example, Step 1 will not use that information, but Step 2 will.
5.6. Analysis results
The three controllers were designed as described above. The generalized stability margin achievedwith all 12 TRACs is depicted in Figure 9. From Figure 10 it is apparent that all three controllersare pretty similar with the DISE controller having a slightly lower bandwidth and the McFarlane–Glover loop shaping controller rolling off at high frequency. This roll-off is due to the observer. Acomparison of the DISE and tuned DISE parameters in Table III reveals that the main differencebetween the two controllers is the angle-of-attack term in C . Thus, the output of the OBAC of thetuned DISE controller is q+k�� instead of simply q . The effect of this is to change the zero ofthe inverted model from Z� to Z�−k�.‡‡
The achieved closed-loop performance is summarized in Table IV with no actuators and inTable V with an average speed and a very slow actuator. Note that the OBAC is different in all threecases. That is because the OBAC is selected with the knowledge of the actuators. As can be seenin Tables IV and V, performance between all three controllers is comparable. McFarlane–Gloverand tuned DISE are faster with tuned DISE having a larger overshoot. For the 5 rad/s actuatormodel, all OBACs correspond to light/aft high flying models.
‡‡Consequently, the desired dynamics will control (s−k�)/s, not 1/s.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

302 G. PAPAGEORGIOU AND M. POLANSKY
10 10 10 100
101
102
10
100
–2
–3 –2 –1
–3 –2 –1
102
104
Frequency (rad/sec)
10 10 10 100
101
102
50
100
150
200
Pha
se (
deg)
Mag
nitu
de [–
]
Frequency (rad/sec)
Hinf controllerDISE controllerTuned DISE controller
Figure 10. The Bode plots of the three controllers.
Table III. A comparison of the parameters of theDISE and tuned DISE controllers.
DISE control Tuned DISE
Kb 4 3.93fi 0.25 0.297fc 0.5 0.59C [0 1] [−0.248 1]
Table IV. Achieved closed-loop performance without actuator dynamics.
Hinf contr. DISE control Tuned DISE
OBAC 9 2 8Min. � 0.591 0.585 0.607Min. GM Inf. Inf. Inf.Min. PM (deg.) 73.2 77.0 77.0Min. damping 0.82 0.74 0.82Max. rise time (s) 0.44 0.85 0.46Max. overshoot 0.02 0.08 0.12
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 303
Table V. Achieved closed-loop performance with actuator dynamics.
Actuators’ natural frequency 10 rad/s Actuators’ natural frequency 5 rad/s
Hinf contr. DISE control Tuned DISE Hinf contr. DISE control Tuned DISE
OBAC 2 4 1 2 2 1Min. � 0.459 0.484 0.490 0.396 0.407 0.405Min. GM 16.4 Inf. Inf. 13.7 Inf. Inf.Min. PM (deg.) 56.8 62.5 59.1 47.5 54.5 48.6Min. damping 0.62 0.74 0.64 0.53 0.57 0.55Max. rise time (s) 0.69 0.65 0.64 0.75 0.84 0.70Max. overshoot 0.19 0.10 0.23 0.26 0.13 0.30
0 2 4 6 8 100
0.5
1
1.5step on q
q [d
eg/s
]
0 2 4 6 8 100
0.5
1
1.5
2
time [s]
elev
ator
def
lect
ion
[deg
]
Figure 11. Step response of the tuned DISE controller with no actuator dynamics. The solid time historyis with the TRAC that is used as the OBAC.
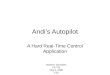
Figures 11–16 illustrate the linear step responses and Nichols charts at the elevator input for thetuned DISE controller with no actuator dynamics, a 10 rad/s actuator model, and a 5 rad/s actuatormodel (there is one plot for each TRAC). The outlier in the step response plots corresponds toTRAC #8 (TRAC #8 has a much smaller Z�). The step responses are acceptable and the Nicholsdiamond specification is never violated.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

304 G. PAPAGEORGIOU AND M. POLANSKY
0 2 4 6 8 100
0.5
1
1.5step on q
q [d
eg/s
]
0 2 4 6 8 100
0.5
1
1.5
2
time [s]
elev
ator
def
lect
ion
[deg
]
Figure 12. Step response of the tuned DISE controller with actuator dynamics at 10 rad/s. Thesolid time history is with the TRAC that is used as the OBAC.
0 2 4 6 8 100
0.5
1
1.5step on q
q [d
eg/s
]
0 2 4 6 8 100
0.5
1
1.5
2
time [s]
elev
ator
def
lect
ion
[deg
]
Figure 13. Step response of the tuned DISE controller with actuator dynamics at 5 rad/s. Thesolid time history is with the TRAC that is used as the OBAC.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 305
0
–5
–10
–15
–20–220 –200 –180 –160 –140 –120 –100 –80 –60
5
10
15
20Open Loop Nichols Chart
phase (deg)
gain
(dB
)
Figure 14. Nichols chart of the tuned DISE controller without actuator dynamics. The solidline is with the TRAC that is used as the OBAC.
0
5
10
15
20Open Loop Nichols Chart
phase (deg)
gain
(dB
)
–5
–10
–15
–20–220 –200 –180 –160 –140 –120 –100 –80 –60
Figure 15. Nichols chart of the tuned DISE controller with actuator dynamics at 10 rad/s.The solid line is with the TRAC that is used as the OBAC.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

306 G. PAPAGEORGIOU AND M. POLANSKY
0
5
10
15
20Open Loop Nichols Chart
phase (deg)
gain
(dB
)
–5
–10
–15
–20–220 –200 –180 –160 –140 –120 –100 –80 –60
Figure 16. Nichols chart of the tuned DISE controller with actuator dynamics at 5 rad/s. The solid lineis with the TRAC that is used as the OBAC.
6. CONCLUSIONS
In this paper, we have proposed a procedure for tuning a DI controller using McFarlane–Gloverloop shaping. We considered SISO LTI plant models of relative degree one.
The proposed tuning procedure is simple and systematic. The inputs into the tuning procedureare two gains (the proportional and integral gains of W2) and the outputs are the C matrix of theOBAC (C) and the desired dynamics (proportional, integral, and command paths). The procedurecan also provide a robust state estimator.
The tuned DI controller comes with robustness guarantees. Without a state estimator the robust-ness guarantees are those of an LQ controller. With a state estimator that is equal to or ‘close’to the McFarlane–Glover loop shaping state estimator, the robustness guarantees are those of or‘close’ to those of a McFarlane–Glover loop shaping controller.
Preliminary results also indicate that the tuning procedure will also work if the relative degreeof the plant model is greater than one and for an MIMO plant.
The proposed tuning procedure was applied to an example pitch axis control problem and theresulting tuned DI controller was compared with a couple of ‘standard’ in the literature controllers.The result was that the tuned DI controller is of comparable performance.
Also discussed in the example was how to choose the OBAC dynamics (A and B matrices)given a group of plant models. A systematic procedure based on the generalized stability marginhas been proposed.
We believe that the proposed procedure will be of great benefit in two cases. The first case isfor flexible plants when a state estimator will be required and it will not be possible to decouple
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

TUNING A DYNAMIC INVERSION PITCH AXIS AUTOPILOT 307
the state feedback and state estimator designs. The second case is when a large number of plantmodels are provided and a short design cycle is required.
ACKNOWLEDGEMENTS
This work has been supported by Honeywell, Inc. Internal Research and Development funds.
REFERENCES
1. Enns D, Bugajski D, Hendrick R, Stein G. Dynamic inversion: an evolving methodology for flight control design.International Journal of Control 1994; 59(1):71–91.
2. Enns D, Papageorgiou G. Dynamic inversion tutorial—theory and example applications. One-day Workshop atthe AACC American Control Conference, Minneapolis, MN, 2006. Workshop notes available upon request.
3. McFarlane D, Glover K. A loop shaping design procedure using H∞ synthesis. IEEE Transactions on AutomaticControl 1992; 37(6):759–769.
4. Papageorgiou G, Glover K. H∞ loop shaping: why is it a sensible procedure for designing robust flightcontrollers? Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, 1999. No.AIAA 99-4272/3.
5. Reiner J, Balas G, Garrard W. Robust dynamic inversion for control of a highly maneuverable aircraft. AIAAJournal of Guidance, Control, and Dynamics 1995; 18(1):18–24.
6. Sadraey M, Colgren R. Robust nonlinear controller design for a complete UAV mission. Proceedings of the AIAAGuidance, Navigation, and Control Conference, Keystone, CO, 2006. No. AIAA 06-6687.
7. Fer H, Enns D. Nonlinear longitudinal axis regulation of F-18 HARV using feedback linearization and LQR.Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, 1997; 4173–4178.
8. Tierno J, Glavaski S. Phase-lead compensation of pitch axis control laws via McFarlane–Glover H∞ loopshaping. Proceedings of the 38th IEEE Conference on Decision and Control, Phoenix, AZ, 1999; 1538–1543.
9. Enns D. Control allocation approaches. Proceedings of the AIAA Guidance, Navigation, and Control Conference,Boston, MA, 1998. No. AIAA 98-4109.
10. Honeywell Technology Center, Lockheed Martin Skunk Works, Lockheed Martin Tactical Aircraft Systems.Application of multivariable control theory to aircraft control laws. Technical Report WL-TR-96-3099, Wright-Patterson Air Force Base, 1996.
11. Lane S, Stengel R. Flight control design using non-linear inverse dynamics. Automatica 1988; 24(4):471–483.12. Magni J-F, Bennani S, Terlouw J (eds). Robust Flight Control: A Design Challenge. Lecture Notes in Control
and Information Sciences. Springer: Berlin, 1997; no. 224.13. Papageorgiou C. Robustness analysis of nonlinear dynamic inversion control laws for flight control applications.
Ph.D. Dissertation, University of Cambridge, U.K., 2003.14. Adams R, Buffington J, Sparks A, Banda S. Robust multivariable flight control. Advances in Industrial Control
Series. Springer: Berlin, 1994.15. Brinker J, Wise K. Stability and flying qualities robustness of a dynamic inversion aircraft control law. AIAA
Journal of Guidance, Control, and Dynamics 1996; 19(6):1270–1277.16. Snell S, Enns D, Garrard W. Nonlinear inversion flight control for a supermaneuverable aircraft. AIAA Journal
of Guidance, Control, and Dynamics 1992; 15(4):976–984.17. Wacker R, Enns D, Bugajski D, Munday S, Merkle S. X-38 application of dynamic inversion flight control.
Advances in the Astronautical Sciences 2001; 107:233–250.18. Ganguli S, Papageorgiou G, Glavaski S, Elgersma M. Piloted simulation of fault detection, isolation and
reconfiguration algorithms for a civil transport aircraft. Proceedings of the AIAA Guidance, Navigation, andControl Conference, San Francisco, CA, 2005. No. AIAA 05-5936.
19. Enns D, Keviczky T. Dynamic inversion based flight control for autonomous RMAX helicopter. Proceedings ofthe AACC American Control Conference, Minneapolis, MN, 2006; 3916–3923.
20. Vinnicombe G. Uncertainty and Feedback: H∞ Loop-shaping and the �-gap Metric. Imperial College Press:London, 2001.
21. Glover K, McFarlane D. Robust stabilization of normalized coprime factor plant descriptions with H∞-boundeduncertainty. IEEE Transactions on Automatic Control 1989; 34(8):821–830.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca

308 G. PAPAGEORGIOU AND M. POLANSKY
22. Doyle J, Francis B, Tannenbaum A. Feedback Control Theory. Macmillan: New York, 1992.23. Balas G, Chiang R, Packard A, Safonov M. Robust Control Toolbox User’s Guide. The MathWorks, Inc.: Natick,
MA, 2005.24. Zhou K, Doyle J, Glover K. Robust and Optimal Control. Prentice-Hall: Englewood Cliffs, NJ, 1996.25. Sefton J, Glover K. Pole/zero cancellations in the general H∞ problem with reference to a two block design.
Systems and Control Letters 1990; 14:295–306.26. Glover K, Vinnicombe G, Papageorgiou G. Guaranteed multi-loop stability margins and the gap metric. Proceedings
of the 39th IEEE Conference on Decision and Control, Sydney, Australia, 2000; 4084–4085.27. Papageorgiou G, Hyde R. Analysing the stability of NDI-based flight controllers with LPV methods. Proceedings
of the AIAA Guidance, Navigation, and Control Conference, Montreal, Canada, 2001. No. AIAA 01-4039.28. Hyde R. H∞ aerospace control design—a VSTOL flight application. Advances in Industrial Control Series.
Springer: Berlin, 1995.29. Papageorgiou G, Glover K, D’Mello G, Patel Y. Taking robust LPV control into flight on the VAAC Harrier.
Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, Australia, 2000; 4558–4564.30. Smerlas A, Postlethwaite I, Walker D, Strange M, Howitt J, Horton R, Gubbels A, Baillie S. Design and flight
testing of an H∞ controller for the NRC Bell 205 experimental fly-by-wire helicopter. Proceedings of the AIAAGuidance, Navigation, and Control Conference, Boston, MA, 1998. No. AIAA 98-4300.
31. La Civita M, Papageorgiou G, Messner W, Kanade T. Design and flight testing of a high-bandwidth H∞loop shaping controller for a robotic helicopter. AIAA Journal of Guidance, Control, and Dynamics 2006;29(2):485–494.
32. Kalman R. When is a linear control system optimal? ASME Journal of Basic Engineering 1964; 51–60.33. Doyle J. Guaranteed margins for LQG regulators. IEEE Transactions on Automatic Control 1978; 23(4):756–757.34. Marcos A, Balas G. Development of linear-parameter-varying models for aircraft. AIAA Journal of Guidance,
Control, and Dynamics 2004; 27(2):218–228.
Copyright q 2008 John Wiley & Sons, Ltd. Optim. Control Appl. Meth. 2009; 30:287–308DOI: 10.1002/oca