Translational and Rotational Mechanical Systems Problems
3
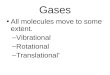
TRANSLATIONAL AND ROTATIONAL MECHANICAL SYSTEMS PROBLEMS 2.4‐ For the system shown in figure P2.4, draw the free body diagram for each mass and write the differential equations describing the system. 2.6‐ In the mechanical system shown in figure p2.6 the spring forces are zero when x1=x2=x3=0. Let the base be stationary do that x3(t) = 0 for all values of t. Draw free body diagrams and write a pair of couple differential equations that govern the motion when the only input is fa(t).
Translational and Rotational Mechanical Systems Problems
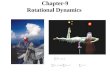
2.14Forthesystemshowninfigurep2.14.Thedisplacementsx1andx2aremeasuredrelativetoM3.Both
springs are undeflected when x1=x2=0. Draw free body diagrams and
write the modelingequations.