Embed Size (px)
Citation preview

Tire ModelingLateral and Longitudinal Tire Forces
Gurkan Erdogan, PhD
April 27, 2009
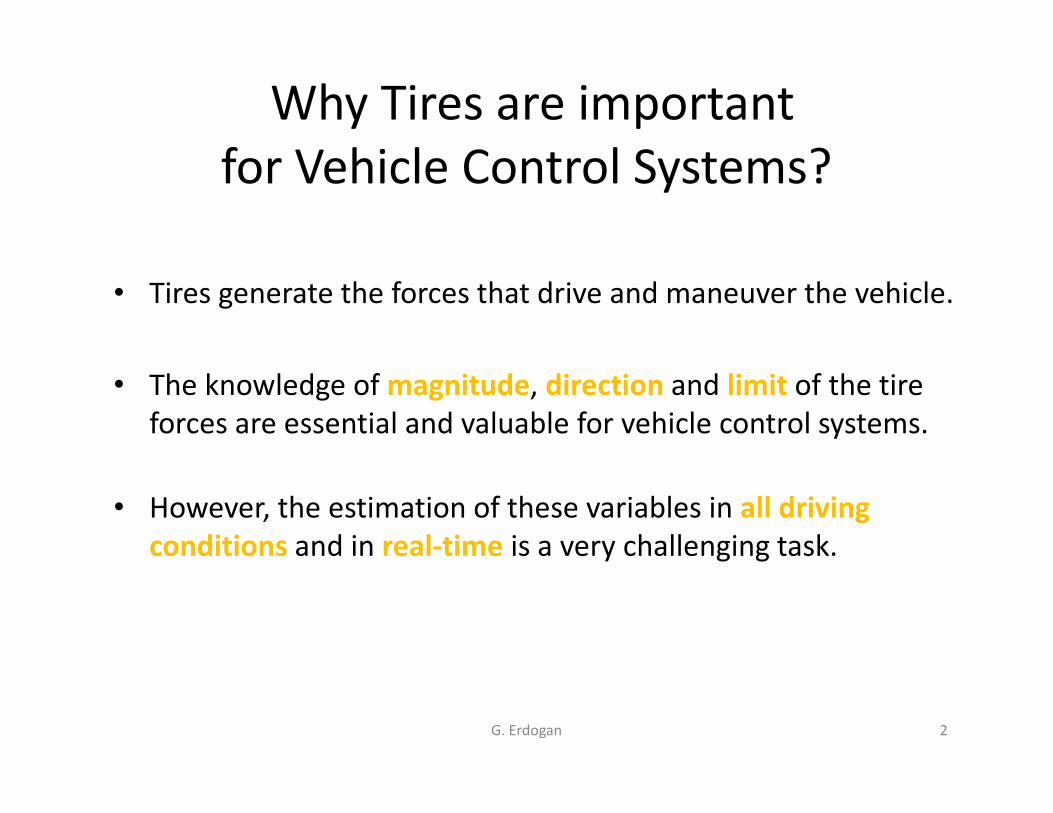
Why Tires are important
for Vehicle Control Systems?
• Tires generate the forces that drive and maneuver the vehicle.
• The knowledge of magnitude, direction and limit of the tire
forces are essential and valuable for vehicle control systems.forces are essential and valuable for vehicle control systems.
• However, the estimation of these variables in all driving
conditions and in real-time is a very challenging task.
G. Erdogan 2
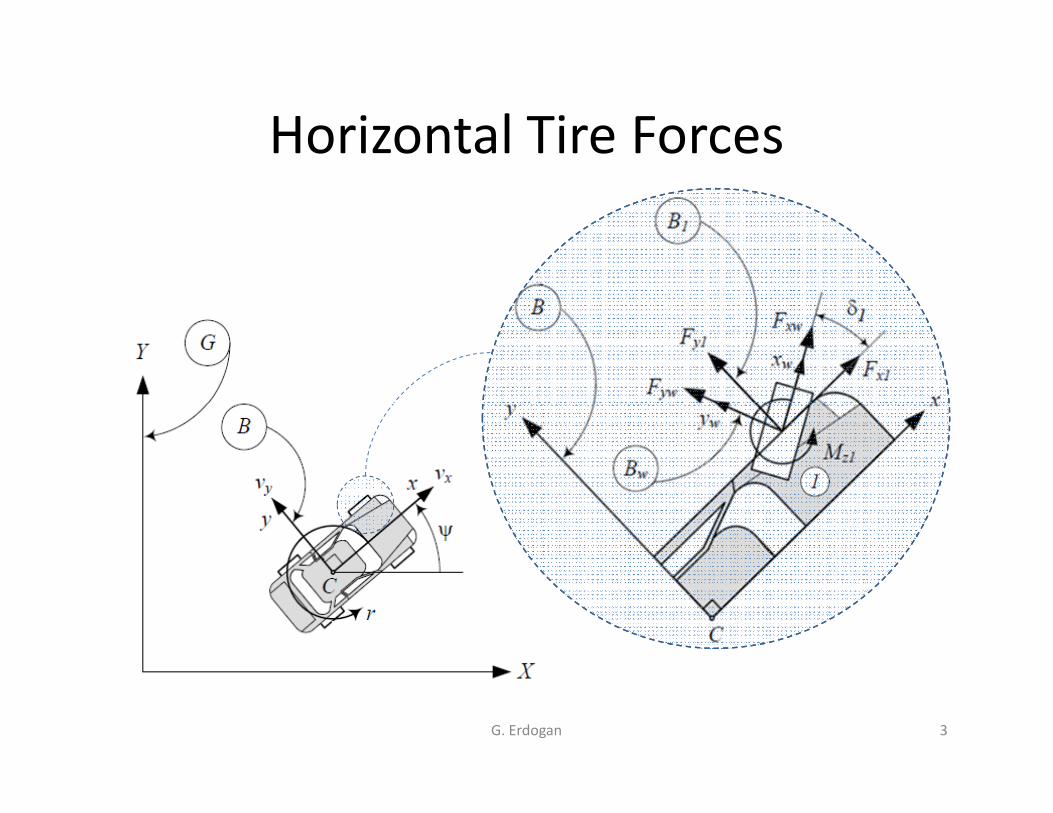
Horizontal Tire Forces
G. Erdogan 3
How tire force is generated?
• Tire forces are generated inside the contact patch, in
other words between the tire and the ground.
• Tire forces are a combination of two factors: • Tire forces are a combination of two factors:
– Friction/sliding in the contact patch, and
– Elastic deformations/slipping of the tire.
G. Erdogan 4
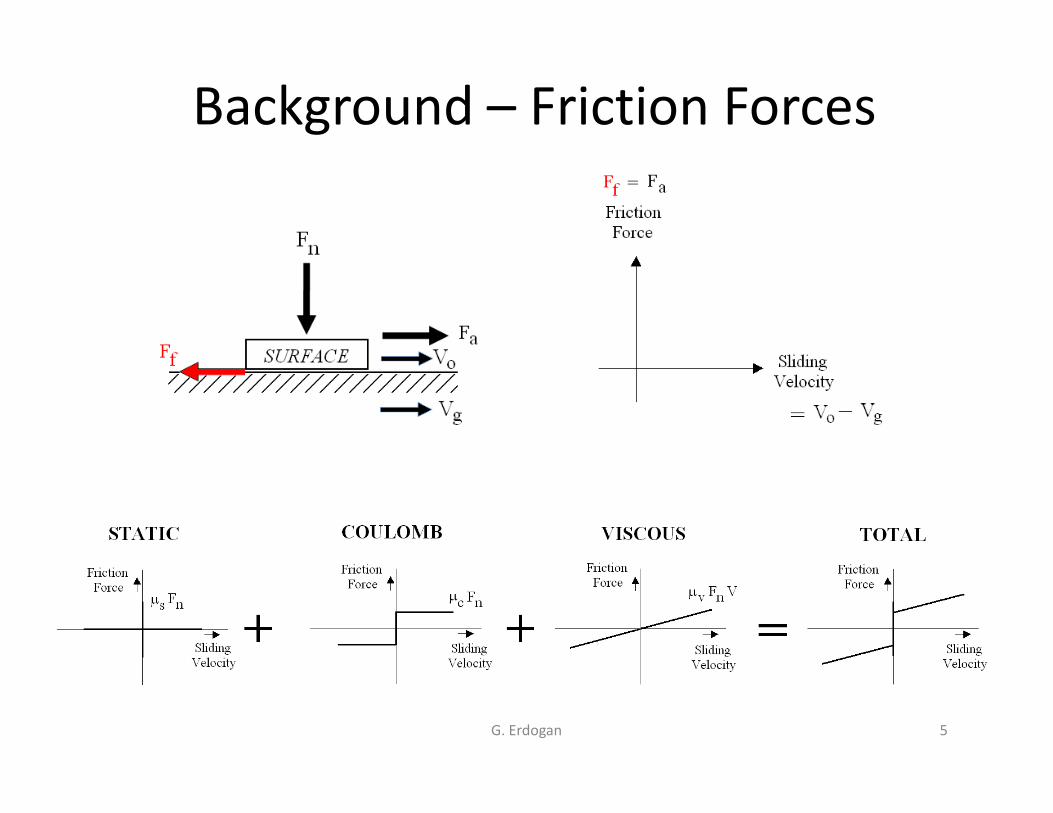
Background – Friction Forces
G. Erdogan 5

Background – Friction Forces
• Stribeck Effect
– Stribeck (1902) observed that the friction force is decreasing
continuously with increasing velocities for low velocities.
G. Erdogan 6

Background – Elastic Force
xkF ×=( )εσ ×= E
G. Erdogan 7
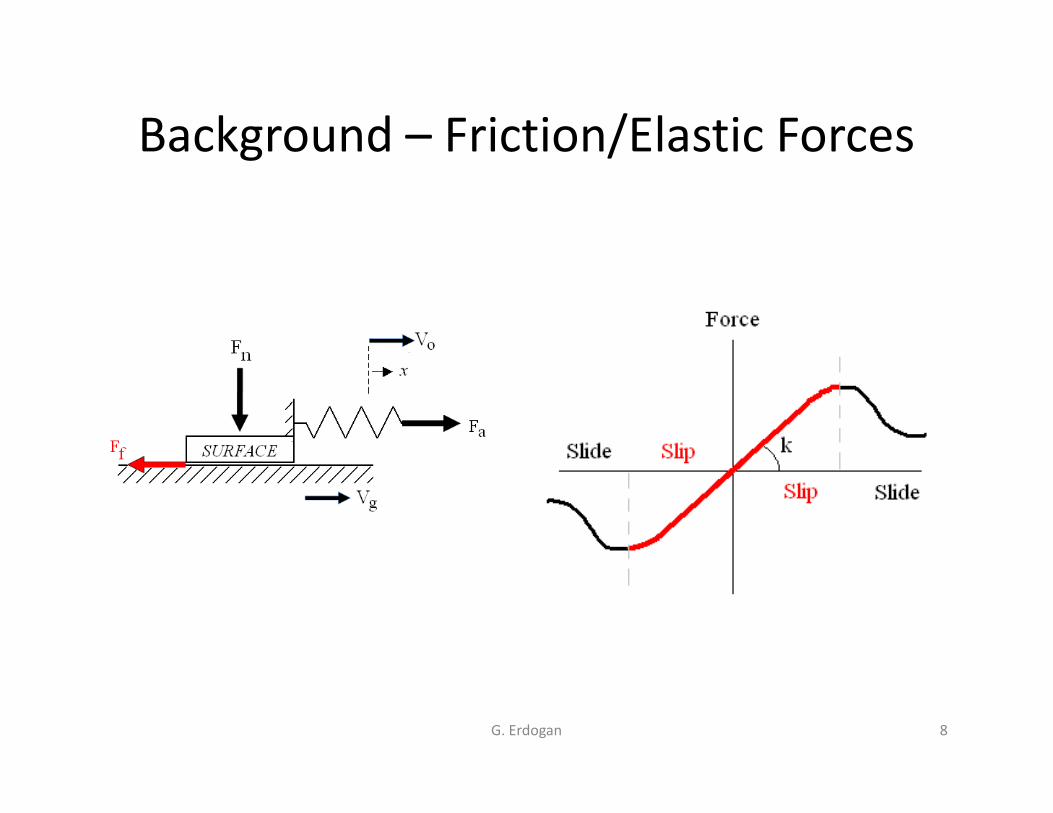
Background – Friction/Elastic Forces
G. Erdogan 8
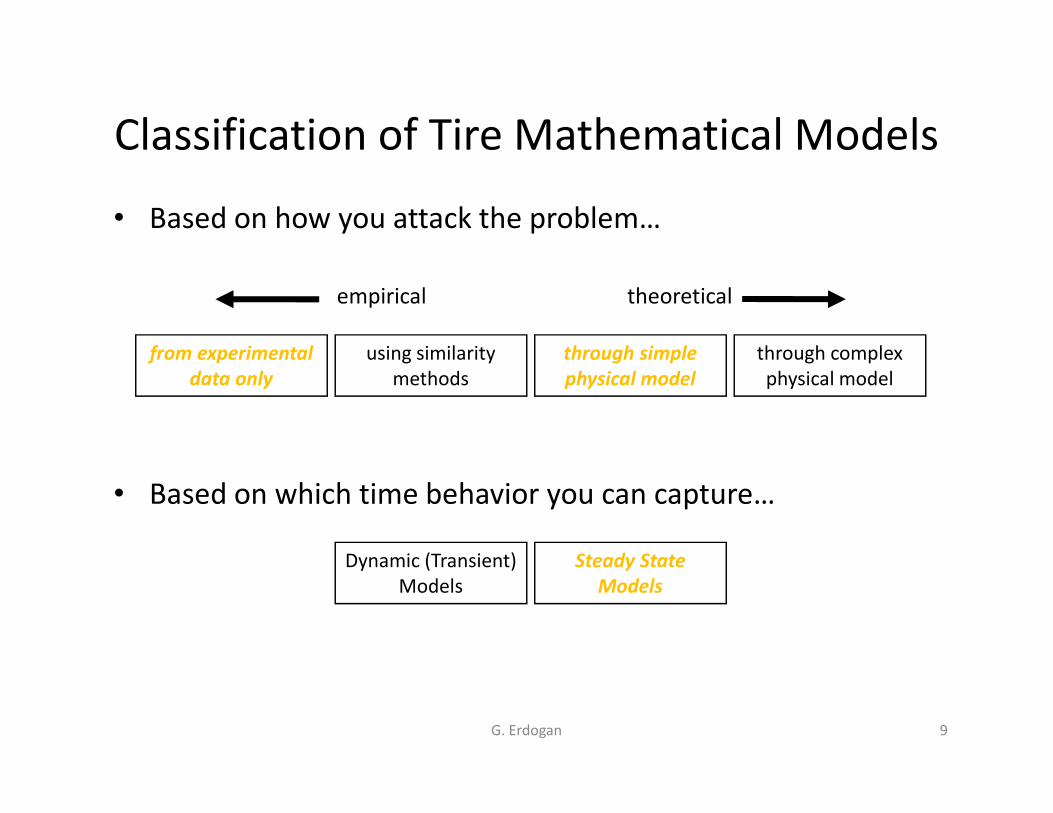
Classification of Tire Mathematical Models
• Based on how you attack the problem…
from experimental
data only
using similarity
methods
through simple
physical model
through complex
physical model
empirical theoretical
• Based on which time behavior you can capture…
G. Erdogan 9
Steady State
Models
Dynamic (Transient)
Models
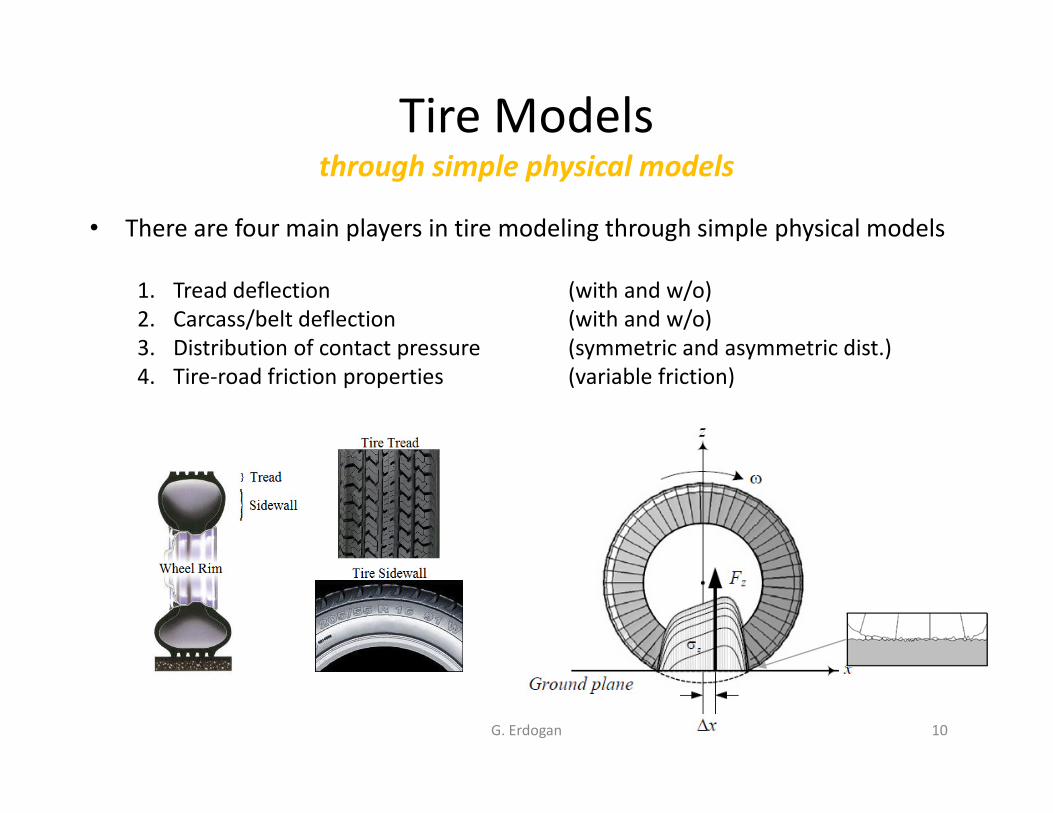
Tire Modelsthrough simple physical models
• There are four main players in tire modeling through simple physical models
1. Tread deflection (with and w/o)
2. Carcass/belt deflection (with and w/o)
3. Distribution of contact pressure (symmetric and asymmetric dist.)
4. Tire-road friction properties (variable friction)
G. Erdogan 10

Tire Modelsthrough simple physical models
• Brush Model– BM (Rigid Carcass)
– BM + Linear Carcass Defection
– BM + Parabolic Carcass Defection
– BM + Asymmetric Carcass Deflection– BM + Asymmetric Carcass Deflection
• String Model– Stretched String (No Tread Element)
– BM + Stretched String
• Beam Model
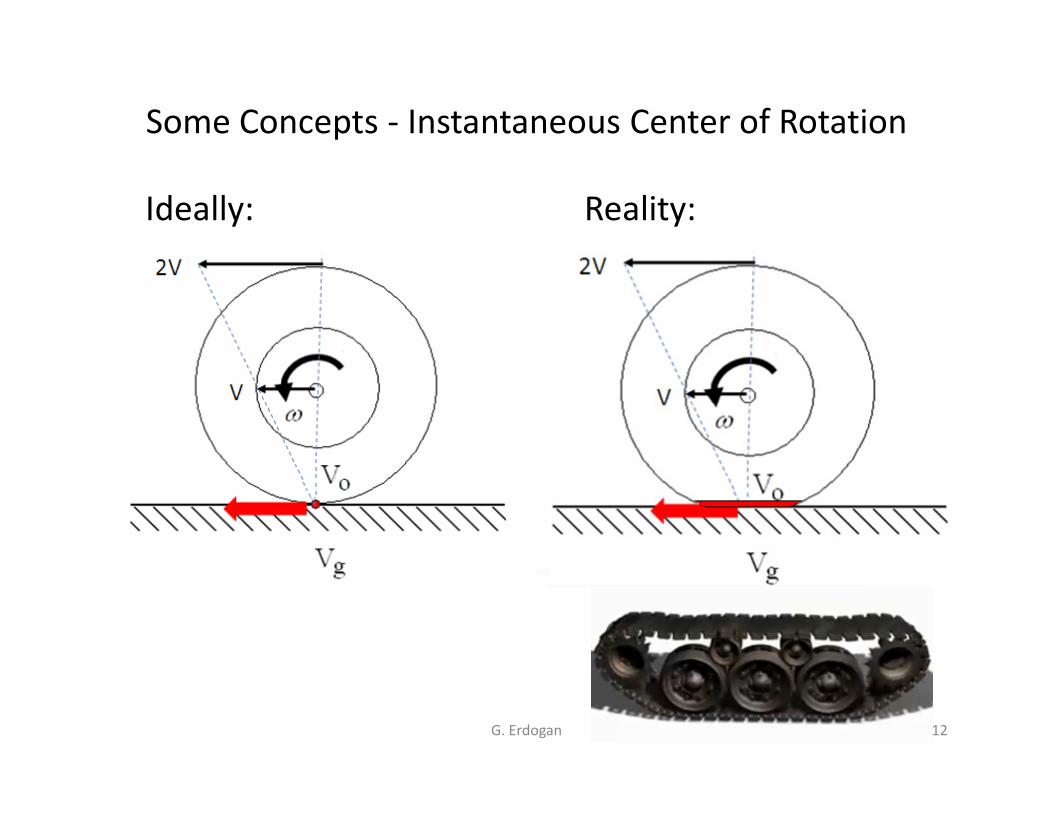
Ideally:
Some Concepts - Instantaneous Center of Rotation
Reality:
G. Erdogan 12
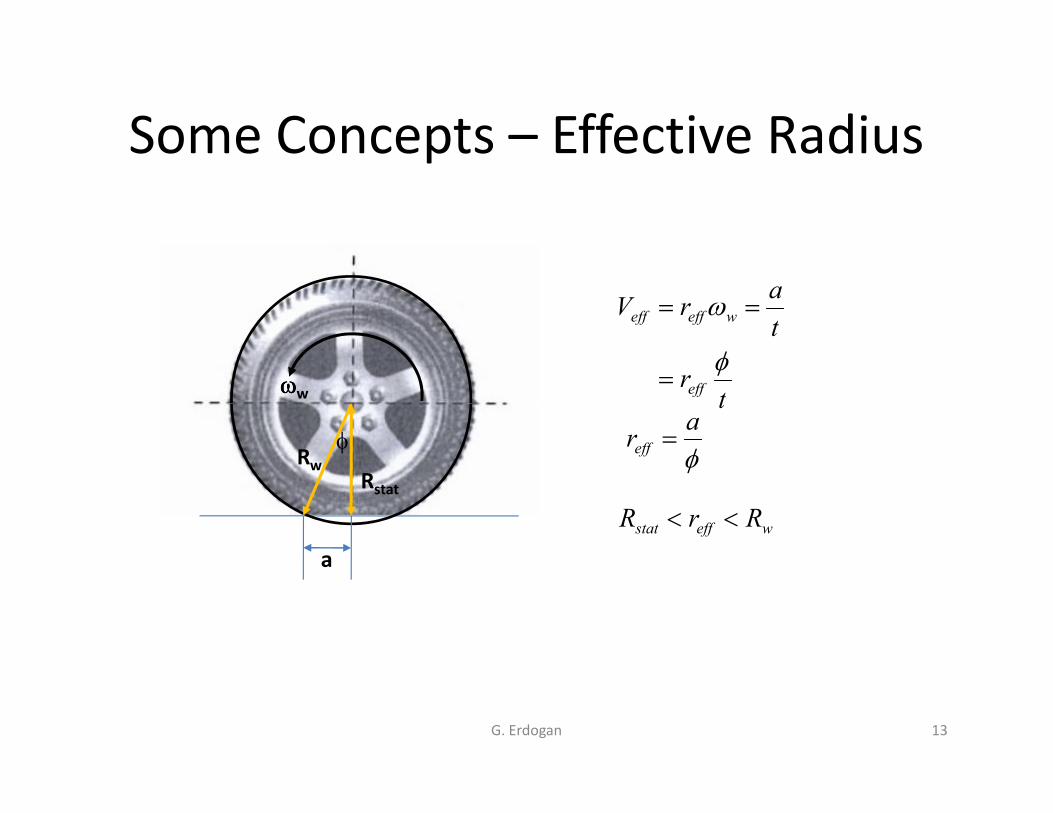
ωωωωw
Some Concepts – Effective Radius
tr
t
arV
eff
weffeff
φ
ω
=
==
Rstat
Rw
a
φ
G. Erdogan 13
t
φa
reff =
weffstat RrR <<
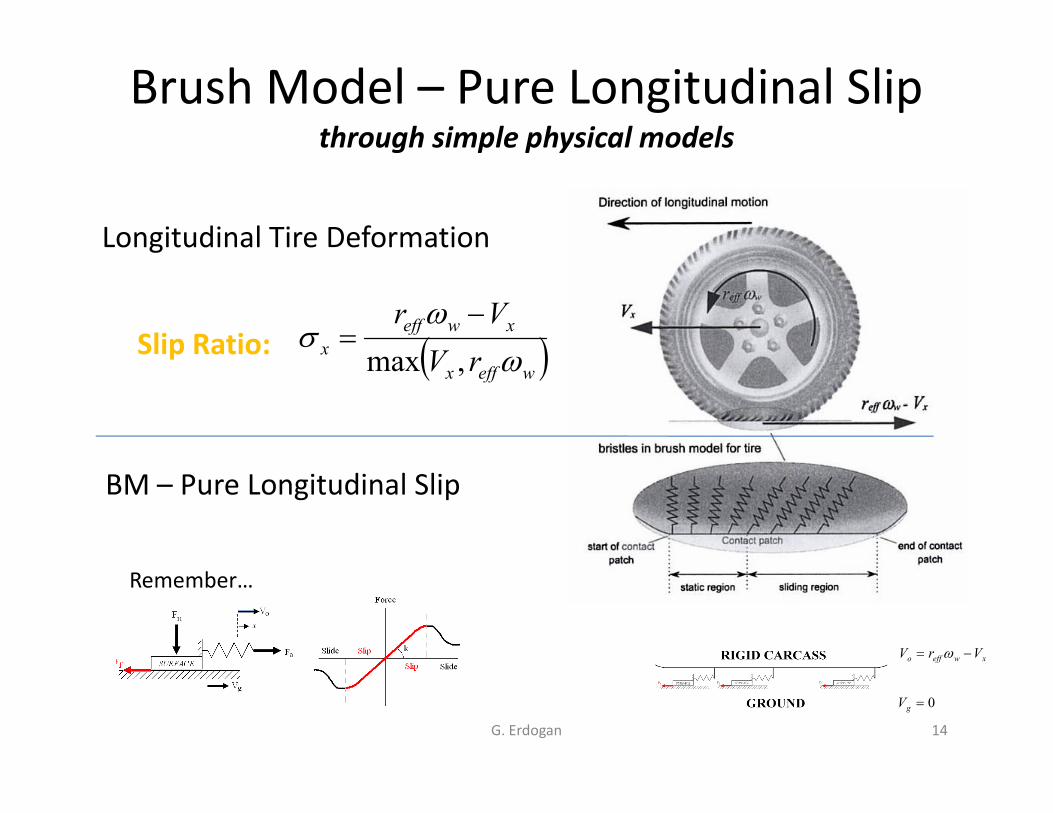
Slip Ratio: ( )weffx
xweff
xrV
Vr
ω
ωσ
,max
−=
Brush Model – Pure Longitudinal Slipthrough simple physical models
Longitudinal Tire Deformation
G. Erdogan 14
xweffo VrV −= ω
0=gV
Remember…
BM – Pure Longitudinal Slip
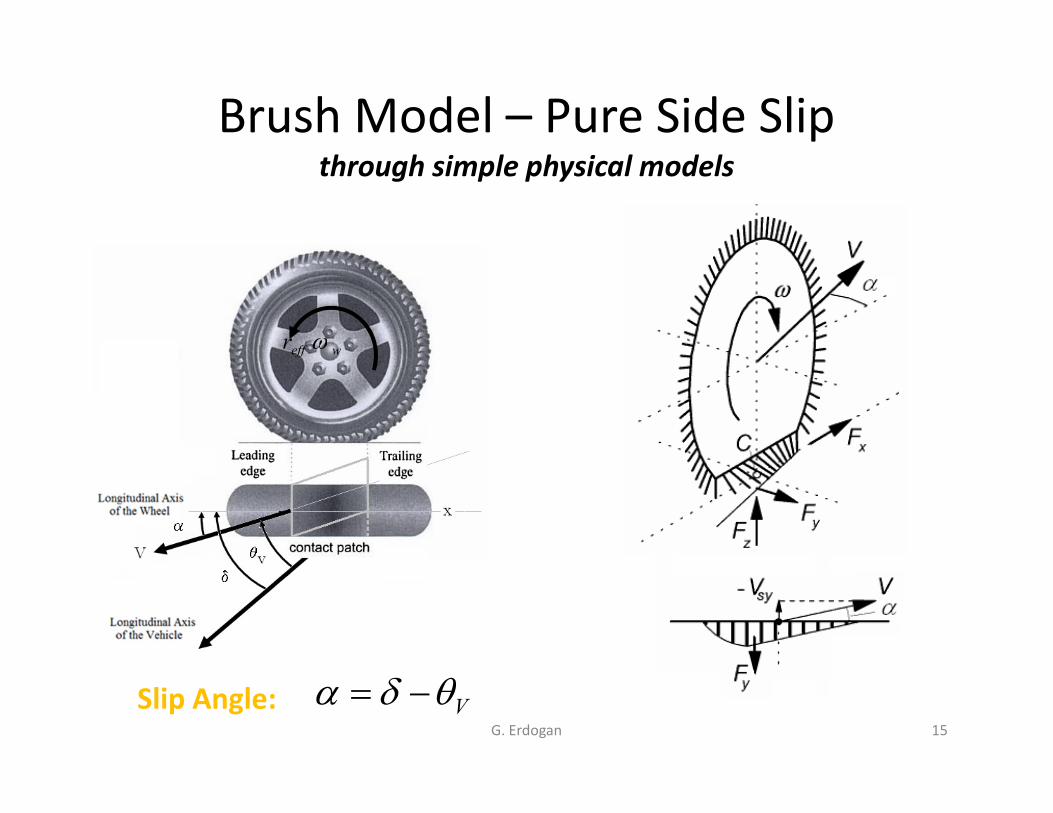
Brush Model – Pure Side Slipthrough simple physical models
weffr ω
G. Erdogan 15
Vθδα −=Slip Angle:
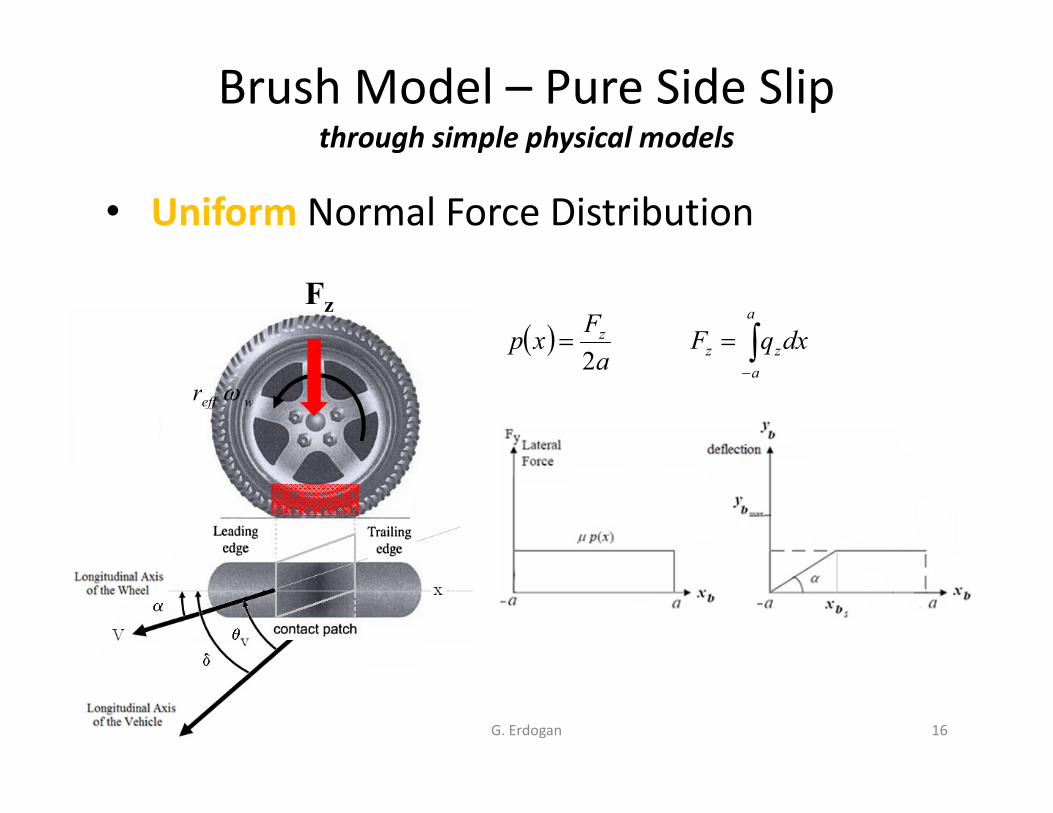
Brush Model – Pure Side Slipthrough simple physical models
• Uniform Normal Force Distribution
weffr ω
Fz
( ) ∫−
==a
a
zzz dxqFa
Fxp
2
G. Erdogan 16
weffr ω
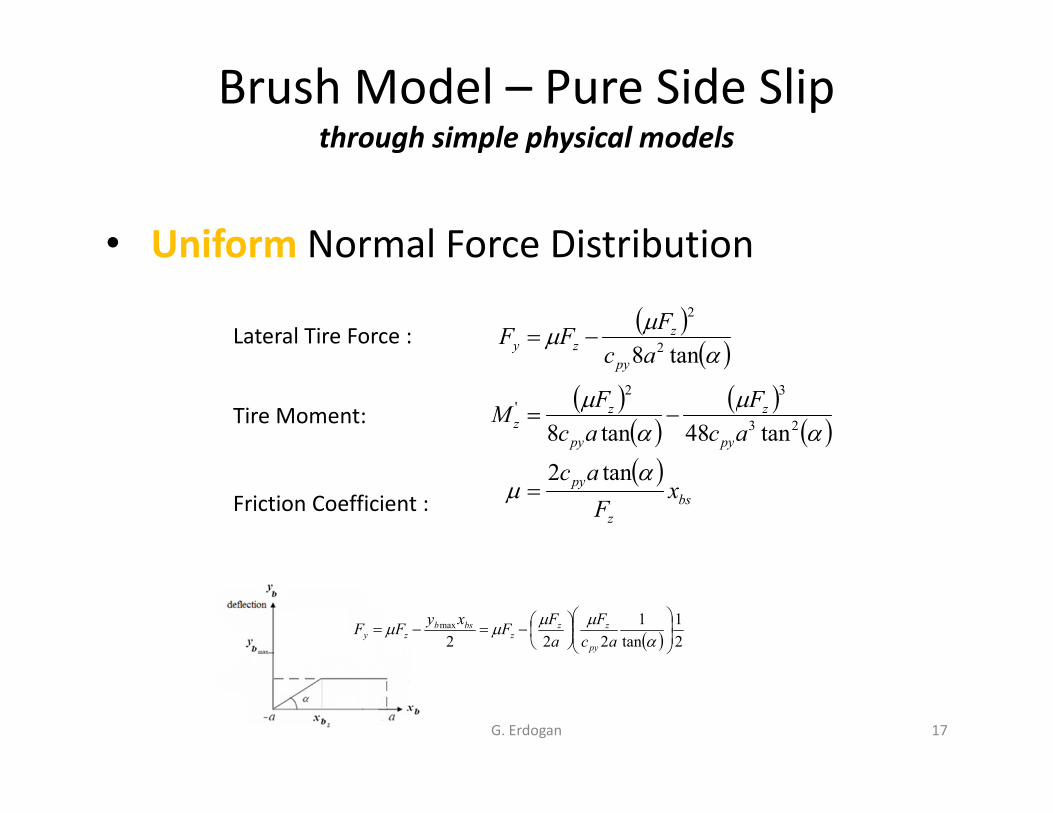
• Uniform Normal Force Distribution
Brush Model – Pure Side Slipthrough simple physical models
( )( )
( ) ( )zz
py
zzy
FFM
ac
FFF
µµ
αµ
µtan8
32
'
2
2
−=
−=Lateral Tire Force :
Tire Moment:
G. Erdogan 17
( )( )
( )( )
( )bs
z
py
py
z
py
zz
xF
ac
ac
F
ac
FM
αµ
αµ
αµ
tan2
tan48tan8 23
'
=
−=
Friction Coefficient :
Tire Moment:
( ) 21
tan
1
222
max
−=−=α
µµµµ
ac
F
a
FF
xyFF
py
zzz
bsbzy
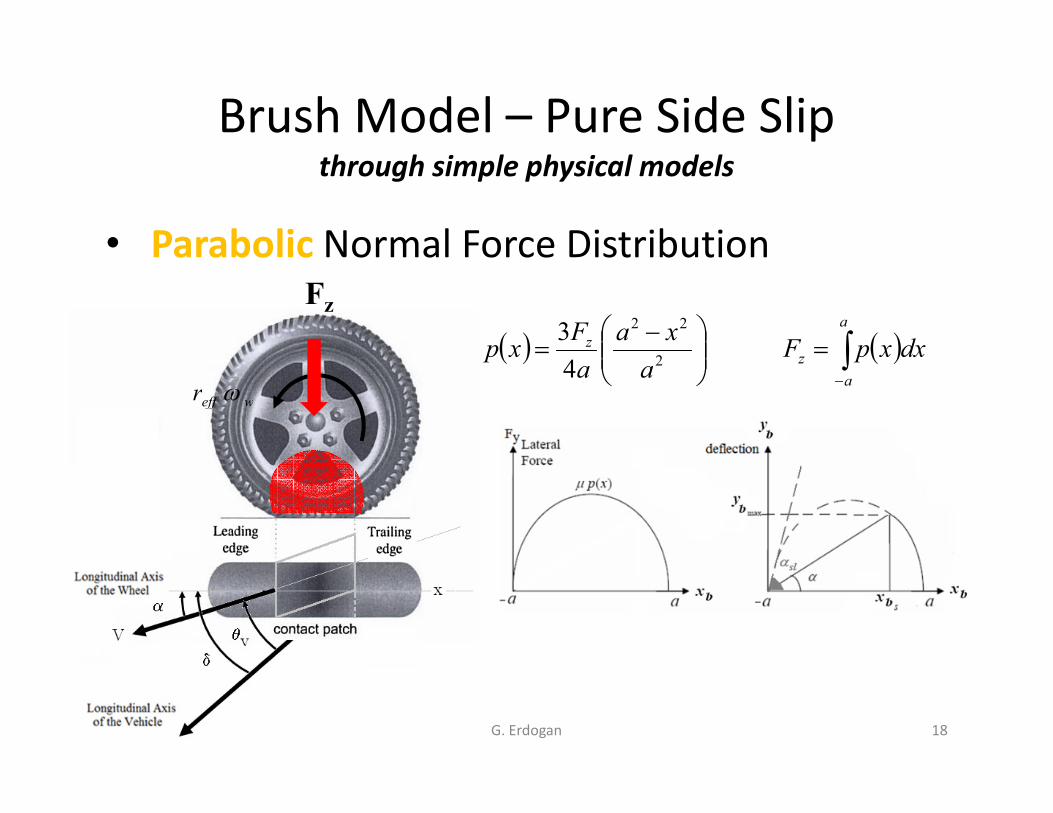
• Parabolic Normal Force Distribution
weffr ω
Fz
Brush Model – Pure Side Slipthrough simple physical models
( ) ( )∫−
=
−=
a
a
zz dxxpF
a
xa
a
Fxp
2
22
4
3
G. Erdogan 18
weffr ω

Brush Model – Pure Side Slipthrough simple physical models
• Parabolic Normal Force Distribution
αθδ =− V
G. Erdogan 19
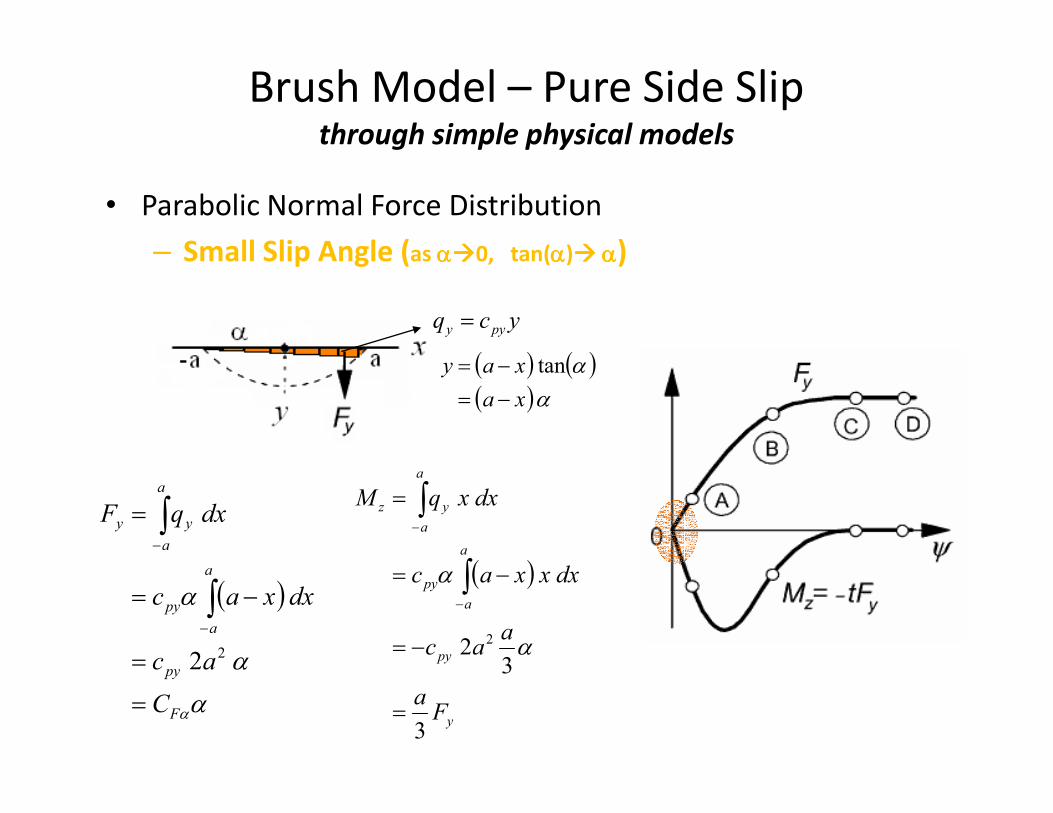
• Parabolic Normal Force Distribution
– Small Slip Angle (as αααα����0, tan(αααα)���� αααα)
( ) ( )( )α
αxa
xay
−=
−= tan
ycq pyy =
Brush Model – Pure Side Slipthrough simple physical models
( )
y
py
a
a
py
a
a
yz
Fa
aac
dxxxac
dxxqM
3
32 2
=
−=
−=
=
∫
∫
−
−
α
α( )
α
α
α
αF
py
a
a
py
a
a
yy
C
ac
dxxac
dxqF
=
=
−=
=
∫
∫
−
−
22
( )αxa −=
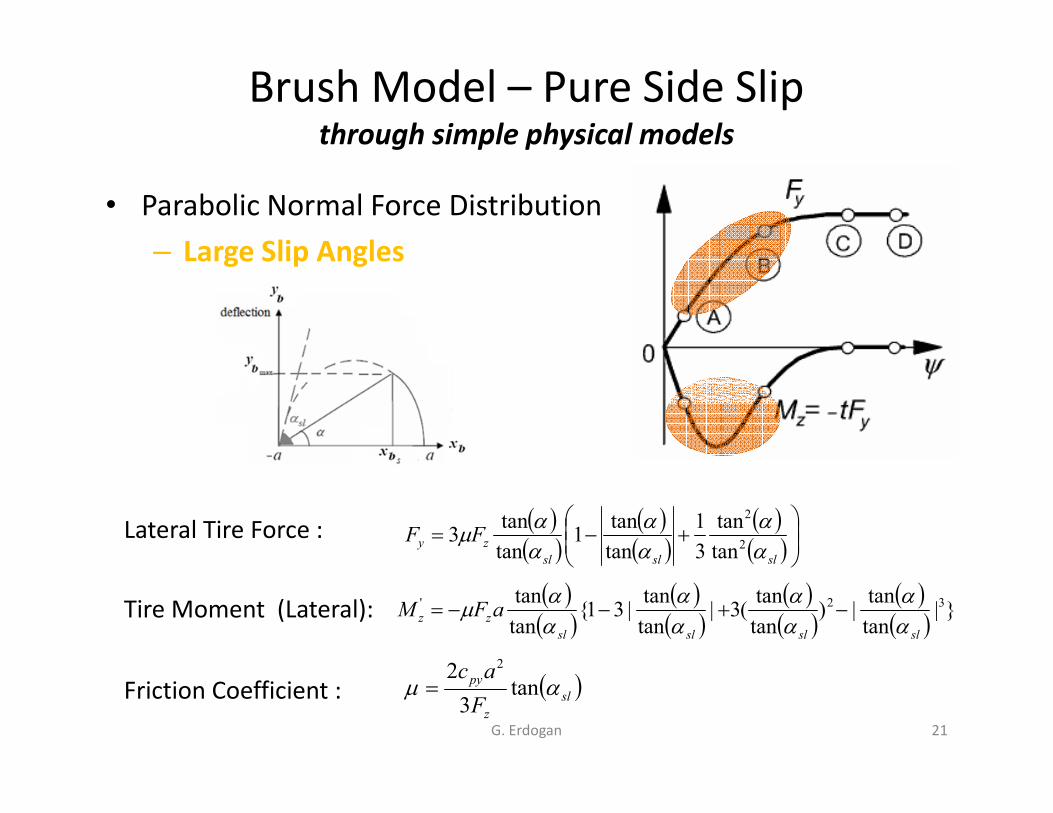
Brush Model – Pure Side Slipthrough simple physical models
• Parabolic Normal Force Distribution
– Large Slip Angles
G. Erdogan 21
( )( )
( )( )
( )( )
+−=
slslsl
zy FFαα
αα
αα
µ2
2
tan
tan
3
1
tan
tan1
tan
tan3
( )slz
py
F
acαµ tan
3
2 2
=
Lateral Tire Force :
Friction Coefficient :
( )( )
( )( )
( )( )
( )( )
}|tan
tan|)
tan
tan(3|
tan
tan|31{
tan
tan 32'
slslslsl
zz aFMαα
αα
αα
αα
µ −+−−=Tire Moment (Lateral):
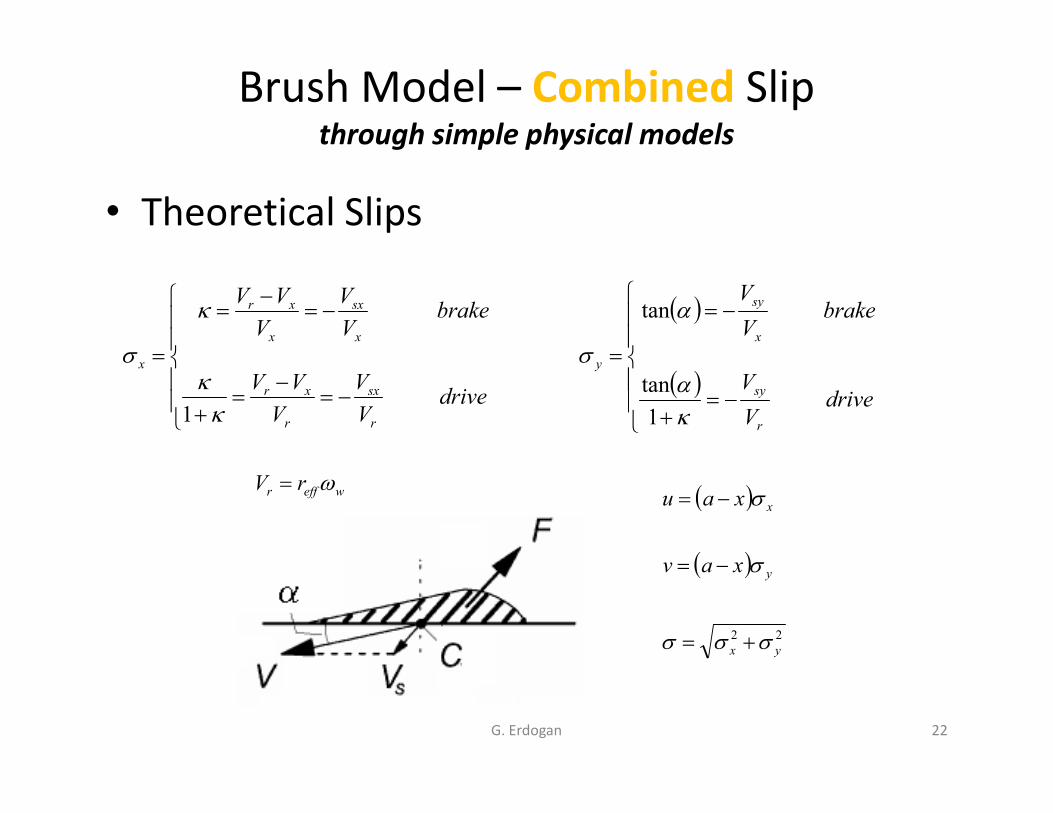
• Theoretical Slips
( )
( )
−=+
−=
=
−=−
=+
−=−
=
=
driveV
V
brakeV
V
driveV
V
V
VV
brakeV
V
V
VV
sy
x
sy
y
sxxr
x
sx
x
xr
x
κα
α
σ
κκ
κ
σ
1
tan
tan
1
Brush Model – Combined Slipthrough simple physical models
G. Erdogan 22
−=+
−==+
driveV
driveVV
rrr κκ 11
weffr rV ω= ( )
( )
22
yx
y
x
xav
xau
σσσ
σ
σ
+=
−=
−=
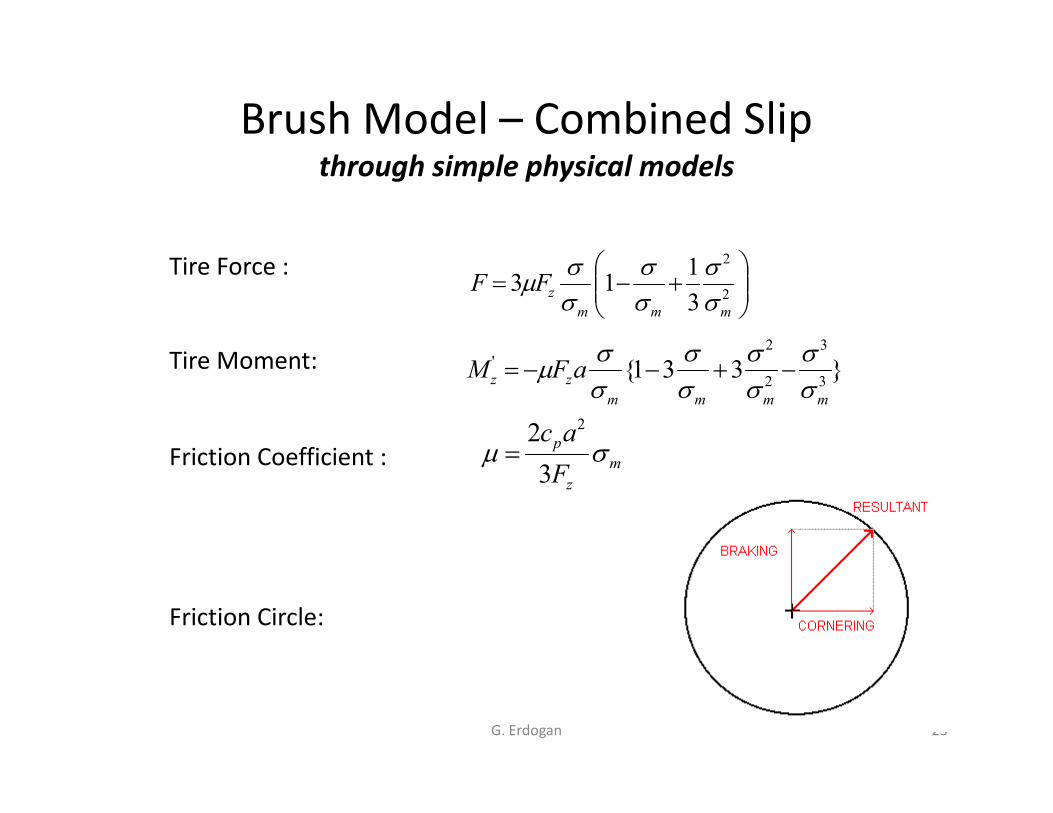
+−=
2
2
3
113
mmm
zFFσσ
σσ
σσ
µTire Force :
}331{3
3
2
2'
mmmm
zz aFMσσ
σσ
σσ
σσ
µ −+−−=Tire Moment:
Brush Model – Combined Slipthrough simple physical models
G. Erdogan 23
m
z
p
F
acσµ
3
2 2
=Friction Coefficient :
mmmm
Friction Circle:
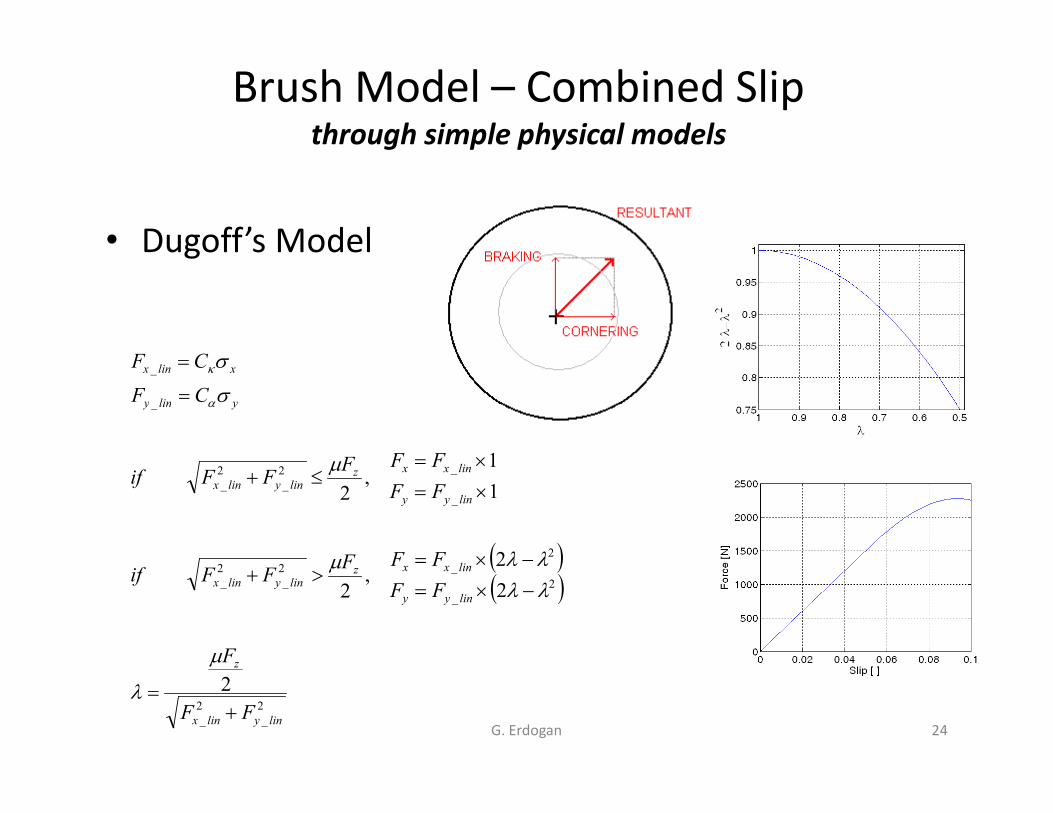
• Dugoff’s Model
_
_
yliny
xlinx
CF
CF
=
=
σ
σ
α
κ
Brush Model – Combined Slipthrough simple physical models
G. Erdogan 24
( )( )
2
_
2
_
2
_
2
_2
_
2
_
_
_2
_
2
_
_
2
2
2,
2
1
1,
2
linylinx
z
linyy
linxxzlinylinx
linyy
linxxzlinylinx
yliny
FF
F
FF
FFFFFif
FF
FFFFFif
CF
+=
−×=
−×=>+
×=
×=≤+
=
µ
λ
λλλλµ
µ
σα
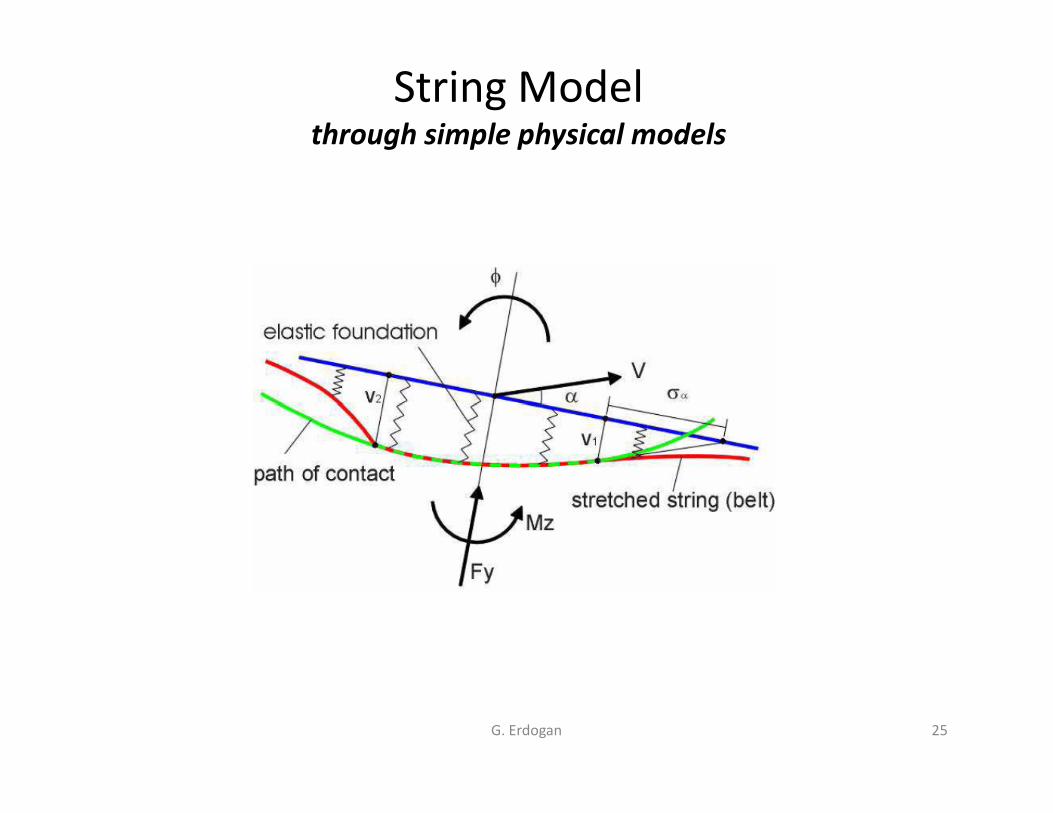
String Modelthrough simple physical models
G. Erdogan 25
• The steady state tire models are handy when we have constant linear and angular velocities.
• Experimental data used to validate the slip/force curves are obtained using specialized equipment that allows independent linear and angular velocity modulation so as to cover the whole slip range.
Dynamic (Transient) Tire Modelsthrough simple physical models
• This steady-state point of view is rarely true in reality, especially when the vehicle goes through continuous successive phases between acceleration and braking.
• Dynamic models capture the transient behavior of the tire-road contact forces under time-varying velocity conditions.– Bliman
– Kinematic TM
– Dahl TM
– LuGre TM
G. Erdogan 26
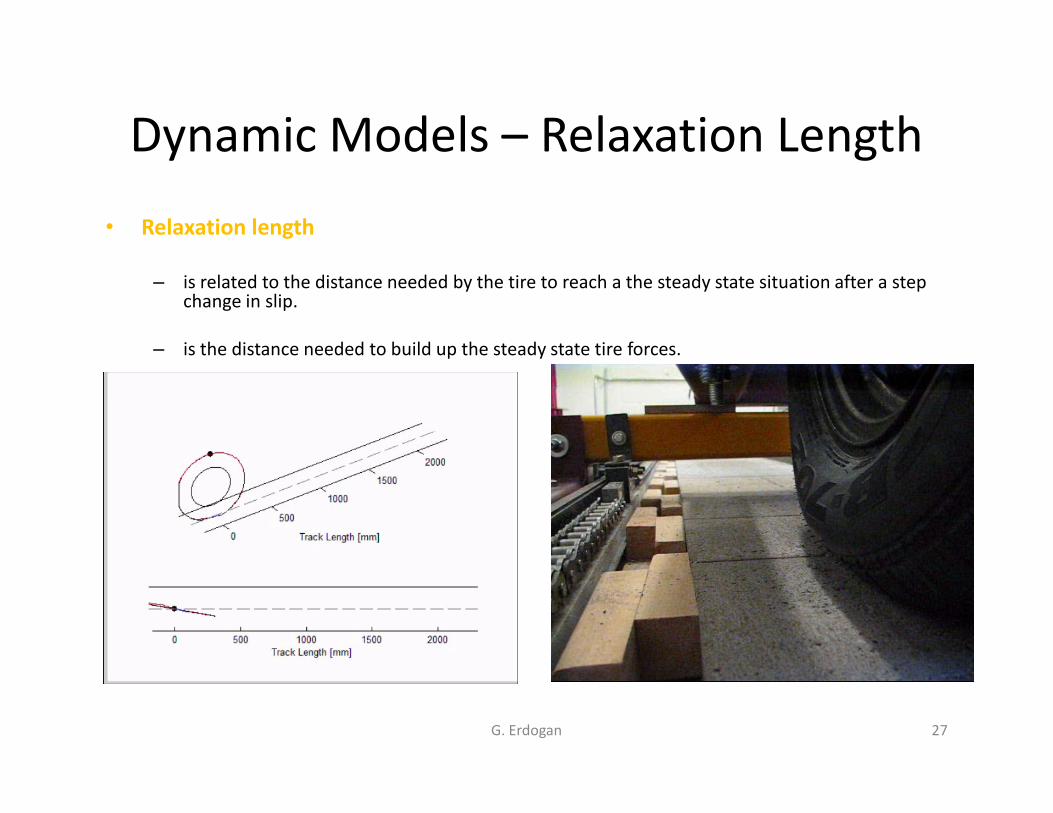
Dynamic Models – Relaxation Length
• Relaxation length
– is related to the distance needed by the tire to reach a the steady state situation after a step change in slip.
– is the distance needed to build up the steady state tire forces.
G. Erdogan 27
( )veFz
FF
coulomb
o
F
x
coulombo
frictionndeformatio
sgn1
−=
=
−σ
σ zF
vvz
coulomb
oσ−=&
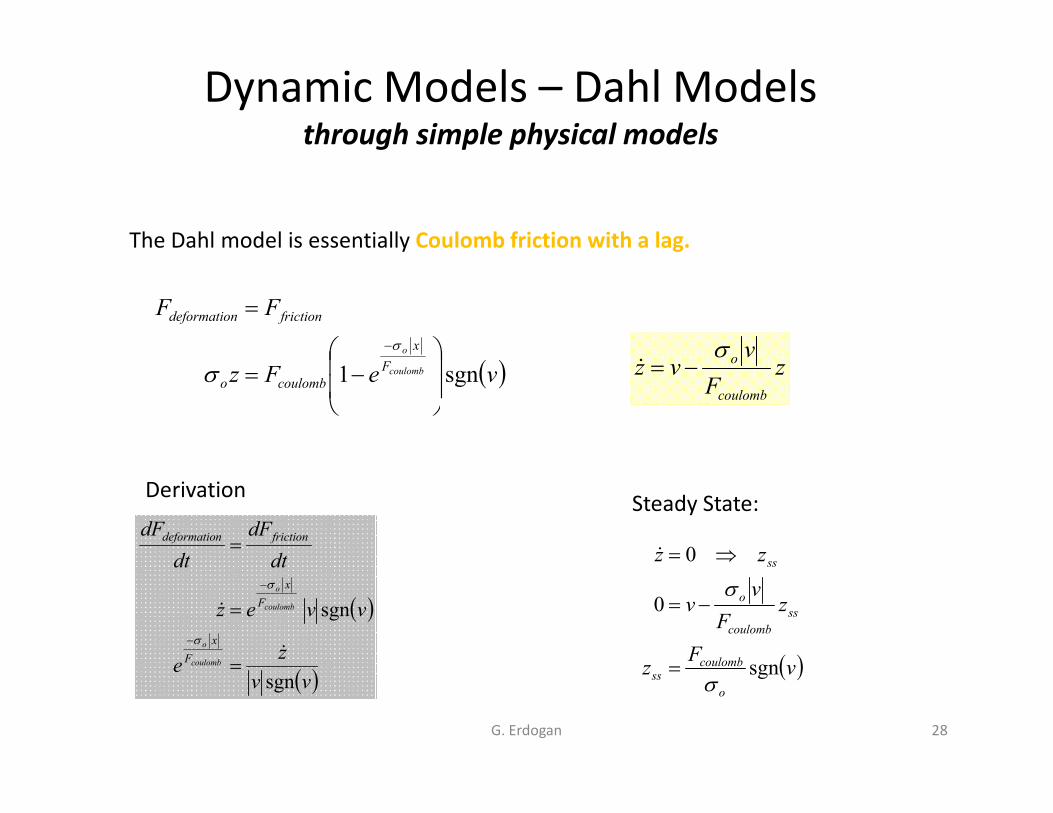
Dynamic Models – Dahl Modelsthrough simple physical models
The Dahl model is essentially Coulomb friction with a lag.
G. Erdogan 28
( )
( )vv
ze
vvez
dt
dF
dt
dF
coulomb
o
coulomb
o
F
x
F
x
frictionndeformatio
sgn
sgn
&
&
=
=
=
−
−
σ
σ
Derivation
( )vFz
zF
vv
zz
o
coulombss
ss
coulomb
o
ss
sgn
0
0
σ
σ
=
−=
⇒=&
Steady State:
( ) ( )
( ) ( ) ( )veFvfzz
orveFz
FF
vg
x
coulombo
vg
x
coulombo
frictionndeformatio
o
o
sgn1
,sgn1
1
−=++
−=
=
−
−
σ
σ
σσ
σ
&
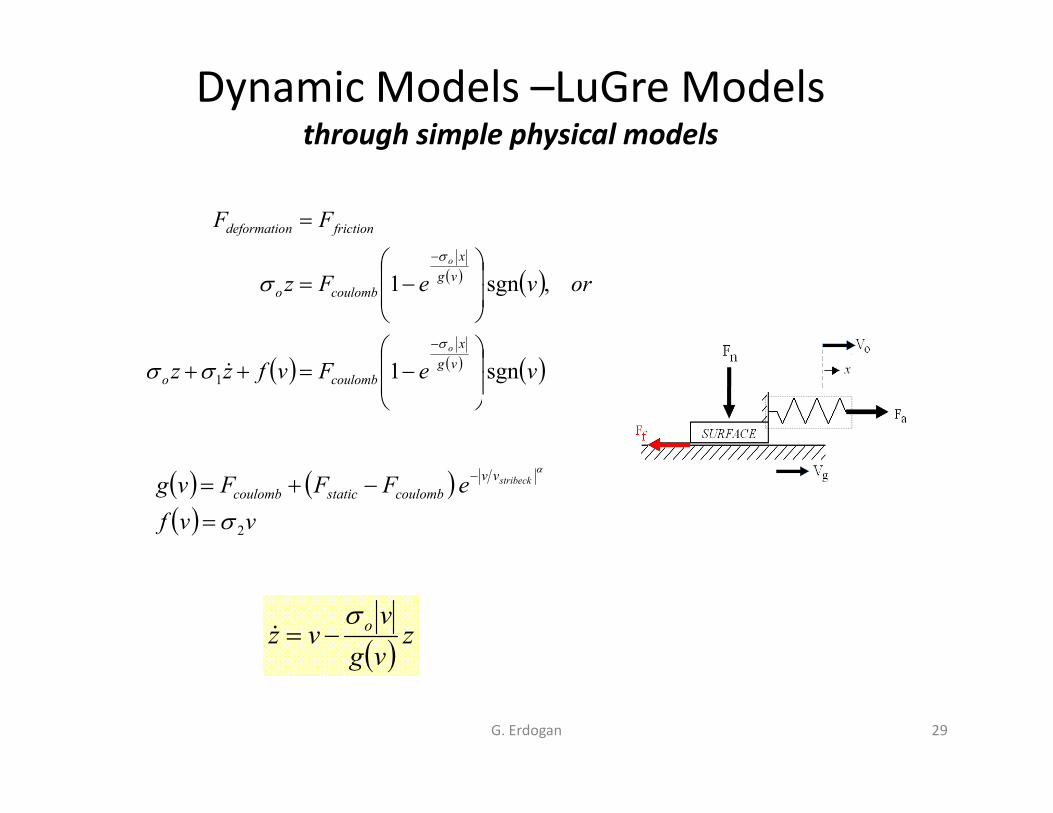
Dynamic Models –LuGre Modelsthrough simple physical models
G. Erdogan 29
( )z
vg
vvz
oσ−=&
( ) ( )( ) vvf
eFFFvg stribeckvv
coulombstaticcoulomb
2σ
α
=
−+= −
Tire Modelsfrom experimental data only
• Pacejka TM
• Burckhardt TM
• Kiencke and Daiss TM
G. Erdogan 30
TIREBLACK BOX
Create
TIRE
DEFORMATION
Measure
TIRE FORCE
( )SlipfForce =
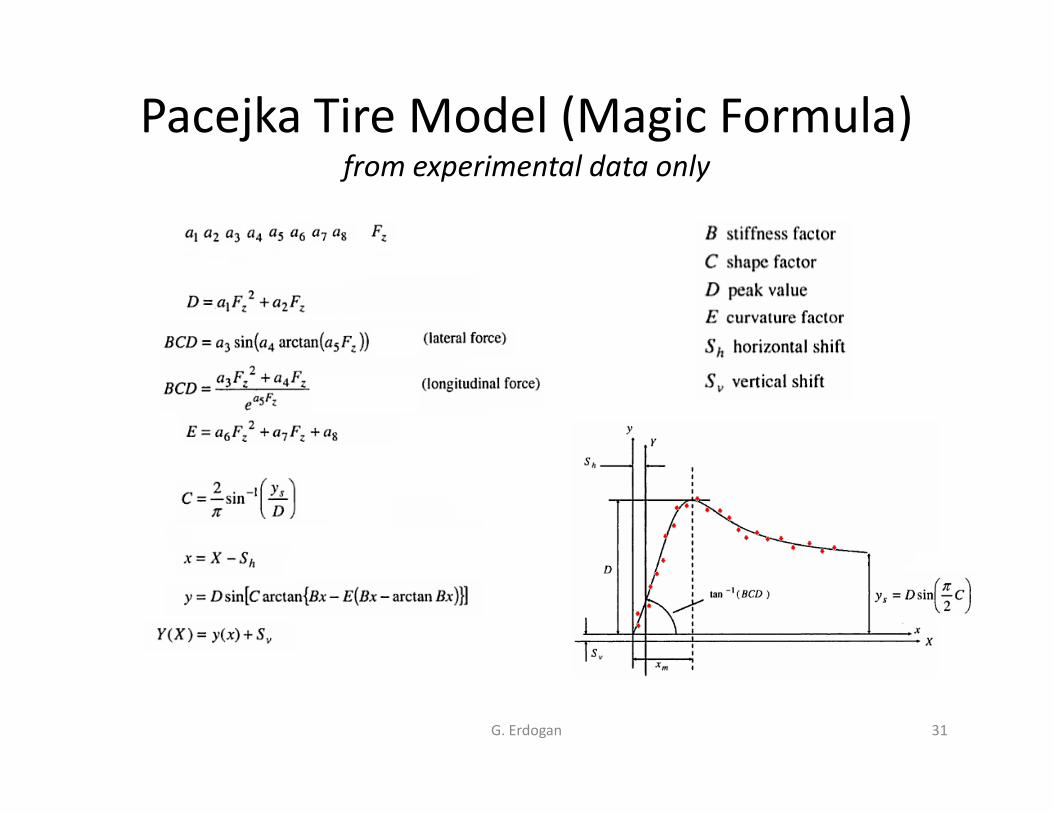
Pacejka Tire Model (Magic Formula)from experimental data only
G. Erdogan 31
References
• Vehicle Dynamics and Control, 2005, R. Rajamani
• Tire and Vehicle Dynamics, 2005, H.B. Pacejka
• Contact Mechanics, 1987, K.L. Johnson
• Vehicle Dynamics: Theory and Application, 2009, R. N. Jazar
G. Erdogan 32
THANKS …
G. Erdogan 33