Embed Size (px)
Citation preview

University of Pennsylvania GRASP1
Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage
Peng Cheng Jim Keller Vijay Kumar
GRASP LabUniversity of Pennsylvania
The 2008 ICRA Workshop onCooperative Control of Multiple Heterogeneous UAVs for Coverage and
Surveillance

University of Pennsylvania GRASP2
Intelligence Surveillance and Reconnaissance (ISR) tasks
Motivation
ONR, Code 30

University of Pennsylvania GRASP3
Motivation3D city maps, such as Google Maps®
New York, Google Maps ®

University of Pennsylvania GRASP4
MotivationAn FAA approved UAV for city law enforcement in Miami

University of Pennsylvania GRASP5
Goal3D Coverage for Reconnaissance and Surveillance in Urban Environments
Two Problems:1. Cooperative coverage with multiple UAVs
Task allocation with minimal communication in finite timeScalable and decentralizedAd-hoc organization
2. 3D coverage of urban structuresComplete coverage with optimality guaranteeDynamic constraints of fixed-wing UAVsLimited field of view of the onboard camera
An Almost Communication-Less Approach to Task Allocation for Multiple UAVsPeng Cheng Vijay Kumar
ThA1: Path Planning Algorithms; Thur. 10:20-10:40am

University of Pennsylvania GRASP6
Task 1 needs 10% UAVs
Task 3 needs 30% UAVsTask 4 needs 40% UAVs
Task 2 needs 20% UAVs
A group of unknown number of UAVs

University of Pennsylvania GRASP7
Positive min. fwd. speed
Limited turning rate
Limited turning rate
Each UAV:• Does not know the total number of UAVs• Does know the task specification and bounded region• Has GPS provide compass and synchronized clock• Has fixed-wings must fly forward (Dubin’s car)• Has limited omni directional sensing range • Has no communication between UAVs
Objective:Determines a task to accomplish in finite time

University of Pennsylvania GRASP8
An Example
Initial configurations Intended task allocation
Task Allocation
1
2 3
4
Allocate the UAVs to provide persistent coverage of the border of the sea. 25% of UAVs are respectively allocated to the 1st and 2nd closed curves, 37.5% for the 3rd curve, and 12.5% for the 4th curve.
Video

University of Pennsylvania GRASP9
Our Solution
Decentralized and scalable with minimal communication (O(1) computation time and O(1) memory with respect to the number of UAVs)Establishes consensus on the total number and task allocation of UAVs in finite timeApplicable for a large group of fixed-wing UAVswith ad-hoc organization
Thur. 10:20-10:40amThA1: Path Planning Algorithms

University of Pennsylvania GRASP10
3D Coverage Problem
Achieve a complete coverage of a building with an onboard camera on a fixed-wing UAV
φ

University of Pennsylvania GRASP11
Challenges
Complicated and coupled dynamics of the UAVComplicated to compute the covered surface area of the buildingHard to provide performance guarantee on
Complete coverageTime optimality

University of Pennsylvania GRASP12
A Search-Based Solution
Sensor footprint of the onboard camera
Area of interest Expensive to compute a solutionHard to provide guarantee on complete coverage

University of Pennsylvania GRASP13
Pattern-Based Solutions - I
Sensor footprint of the onboard camera
Area of interest

University of Pennsylvania GRASP14
Pattern-Based Solutions - II
Sensor footprint of the onboard camera
Area of interest Hard to quantify the time optimality whileincorporating system dynamics

University of Pennsylvania GRASP15
Our Objectives
Compute a coverage plan in real-timeApplicable for the fixed-wing UAVsProvide performance guarantee
Complete coverageTime optimality
Simplified dynamics and
building models
Improved pattern-based
coverage +

University of Pennsylvania GRASP16
A Simplified UAV Model
Decoupled dynamicsIn x-y plane, the Dubin’s car model
In z direction, the double integrator model
( vf has a positive lower bound for the fixed-wing UAVs)

University of Pennsylvania GRASP17
Simplified Building Models
( )FBO
The hemisphere model
The cylinder model

University of Pennsylvania GRASP18
Constant Coverage Rate
O
A C
DB
Tight lower bound on the time to achieve complete coverage of the hemisphere

University of Pennsylvania GRASP19
The Lower Bound on Coverage Time

University of Pennsylvania GRASP20
Coverage Plan for the Hemisphere Model
Constant factor optimality: T ≤ k TL ≤ k Topt

University of Pennsylvania GRASP21
Constant Factor Optimality
max'minmax
minmax'
''
,,
,
2212
8510
22
zzzz
zzz
Lf
zzL
i iiht
ivtLthall
vvaa
aaa
Tv
vaT
TTTTTT
=+
=
⎟⎟⎠
⎞⎜⎜⎝
⎛++
+≤
+++
≤+= ∑ ∑
ππ
π

University of Pennsylvania GRASP22
Multiple UAV Persistent Coverage
UAVsofnumber the:
rate refreshing :
n
T
TTn
f
f
all=

University of Pennsylvania GRASP23
Multiple UAV Multiple Buildings
Br
( )FBO( )FBO
( )FBO
( )FBO

University of Pennsylvania GRASP24
Multiple UAV Multiple Buildings
Br
( )FBO( )FBO BO
Br
Gr( )FBO BO
Br
Gr( )FBO BO
Br
Gr
( )FBO BO
Br
Gr

University of Pennsylvania GRASP25
Multiple UAV Multiple Buildings
Br
( )FBO( )FBO BO
Br
Gr( )FBO BO
Br
Gr( )FBO BO
Br
Gr
( )FBO BO
Br
Gr

University of Pennsylvania GRASP26
Preliminary Results with Dynamic Models

27GRASP
Autopilot connected for hardware-in-the-loop testing in lab
Offset view of aircraft from simulator
Active Waypoint
Aircraft location
Autopilot connected for hardware-in-the-loop testing in lab
Offset view of aircraft from simulator
Active Waypoint
Aircraft location
Overview of System

28GRASP
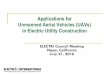
Power Required for Maneuvering Flight
05
1015
05
1015
2025
250
300
350
400
450
500
Flight Path Angle - degrees
Bank Angle - degrees
Pow
er R
equi
red
-Wat
ts
Navigation Limits
Assumption of Decoupled Requirements for Turning and Climbing SegmentsAppropriate for Simulated Flight Conditions:
• Velocity near minimum power required• Maximum angle of bank low in magnitude

29GRASP
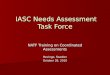
Trim Angle of Attack for Maneuvering Flight
05
1015
0
5
10
15
20
25
6
6.5
7
7.5
8
Flight Path Angle - degrees
Bank Angle - degrees
Trim
Ang
le o
f Atta
ck -
degr
ees Flight Plan entirely within range of linear aerodynamics

30GRASP
Simulation Data for Hemispherical Flight Path Over a Building in Lower Manhattan (17 State St.)
Simulation Model:• Nonlinear Equations of Motion• Linear Aerodynamic Forces and Moments
Visualization:• FlightGear v9.9
Air Vehicle Configuration:• Quarter scale Piper Cub J3 • PiccoloTM Autopilot Hardware-in-the-loop
Flight Conditions:• Sea Level/Standard Day Ambient Conditions• Cruise Airspeed set to 15 m/s• Maximum Commanded Angle of Bank set to 15o (minimum radius of turn = 85.7m)• Target Climb Angle: 15o (maximum power)• No winds
Building Height: 208mCamera FOV: 35o
Trajectory Requirements for Air Vehicle:• increase in power required to climb(φ = 0) = mgVηpropsin(γ) ~ 820*sin(γ) [Watts]
• increase in power required to turn(γ = 0) = (mg)2Vηprop ~ 33*sec2(φ)) [Watts]qSπAecos2(φ)
} Dictates 4 Tiers for Complete Coverage; 96 waypoints

31GRASP
FlightGear Scenery Sparse Compared to RealityPermits Execution of Hemispherical Flight Plan

32GRASP
T =0 @ first waypointT =0 @ first waypoint
Launch pointLaunch point
Last point in time historyLast point in time historyReference Point for Reference Point for δδNorthing, Northing, δδEasting Easting measurementsmeasurements
Flight Plan Flight Plan Actual PathActual Path
Map-view of Simulated Flight Path

33GRASP
Cartesian view of flight plan
East - m
North - m
Alt. - m

34GRASP

35GRASP
0 50 100 150 200 250 300 350 400 4500
100
200
300
400
500
600
Time - sec
delta
Nor
thin
g, d
elta
Eas
ting
and
Alti
tude
from
refe
renc
e - m δδNorthing from Reference:Northing from Reference:
Flight Plan:Flight Plan:Actual Path:Actual Path:
δδEasting from Reference:Easting from Reference:Flight Plan:Flight Plan:Actual Path:Actual Path:
δδAltitude from Reference:Altitude from Reference:Flight Plan:Flight Plan:Actual Path:Actual Path:
Trajectory Following Performance:• Within expected limits for Piccolo except during transition phases
Time History Data

36GRASP
GRASP Autonomous UAV
Flight Test Data/Imagery6August06
Pipersville, PA
Trajectories for Time Optimal Surveillance

37GRASP
Flight Field – Pipersville, Pennsylvania

38GRASP
Autopilot and Camera Installation on Aircraft
Fixed forward-looking camera: 30o down from level attitude
Ground Station Antenna
Autopilot Housing
Airspeed/AltitudeSensor
GPS Antenna

39GRASP
Coverage of Flightline

40GRASP
Landing/Recovery

University of Pennsylvania GRASP41
Conclusion
Real-time trajectory design for fixed-wing UAVsfor coverage of urban structuresPerformance guarantee
Complete coverageConstant-factor time optimality
Verified with the hardware-in-the-loop simulation results
Thank you! Questions!An Almost Communication-Less Approach to Task Allocation for Multiple UAVs
Thur. 10:20-10:40amThA1: Path Planning Algorithms