Embed Size (px)
Citation preview

1
Thèse de doctorat de l’Université du Littoral
Spécialité Télédétection et méthodes statistiques
Présentée par :
Houda Yahi
Titre :
Méthodologie de prévision de la pollution atmosphérique particulaire :
Vers une télédétection satellitaire
JURY Gilles Bergametti Rapporteur Philippe Naveau Rapporteur Alain weill Examinateur Isabelle Chiapello Examinateur Natalie Poisson Examinateur Sylvie Thiria Directeur de thèse Richard Santer Directeur de thèse
Laboratoire d’Océanographie et du Climat : Expérimentations et approches numériques
Unité Mixte de Recherche 7159 CNRS/IRD/Université Pierre et Marie Curie/MNHN
Institut Pierre Simon Laplace

2
Résumé Les aérosols constituent un enjeu important pour l’étude de l’atmosphère. En effet ceux‐ci ont des conséquences sanitaires néfastes, modifient‐la visibilité et ont sur le bilan radiatif des effets directs (absorption/ réfraction de la lumière), semi directs (modification du profil vertical de température) et indirects (impacts sur la formation des nuages en tant que noyaux de condensation). Leur modélisation est particulièrement complexe, aussi bien physiquement que numériquement. Les mesures satellitaires d’épaisseur optique en aérosols (AOT) permettent la surveillance globale journalière du contenu atmosphérique en particules. Cependant la relation permettant de retrouver les concentrations massiques en (PM10) à partir des mesures optiques est loin d’être simple. Nous proposons une méthodologie basée sur une classification en types de temps qui permet de mettre en évidence des situations météorologiques typiques (types de temps en classant des variables météorologiques modèle) pour lesquelles, la relation (PM10, AOT) est simplifiée, et une prévision de (PM10) à partir d’épaisseur optique largement meilleure.

3
Table des matières
Résumé .................................................................................................................................................... 2
Table des matières .................................................................................................................................. 3
Introduction générale .............................................................................................................................. 5
1. Définition et physique des Aérosols .............................................................................................. 11
Introduction ....................................................................................................................................... 11
1.1 Caractéristiques physiques des aérosols ............................................................................... 13
1.1.1 Composition chimique ................................................................................................... 13
1.1.2 Granulométrie ............................................................................................................... 15
1.2 Caractéristiques optiques des aérosols ................................................................................ 18
1.2.1 Epaisseur optique et coefficient d’Angström ................................................................ 19
1.2.2 Albédo de diffusion simple ............................................................................................ 21
1.2.3 Fonction de phase ......................................................................................................... 21
1.2.4 Théorie de Mie .............................................................................................................. 22
1.3 Distribution verticale des aérosols ........................................................................................ 22
2. Outils instrumentaux et Méthodes Statistiques ........................................................................... 28
2.1 Introduction ............................................................................................................................... 28
2.2. Relation entre concentration massique au sol et épaisseur optique (AOT) ............................ 28
2.3 Outils instrumentaux de mesure ................................................................................................ 30
2.3.1 Mesures in situ de qualité de l’air ...................................................................................... 30
2.3.2 Aeronet‐ Photons ............................................................................................................... 32
2.3.3 Satellites .............................................................................................................................. 33
2.4 Modèles Météorologique et de Chimie‐Transport ..................................................................... 36
2.5 La carte topologique auto‐organisatrice de Kohonen ............................................................... 37
2.5.1 Architecture ......................................................................................................................... 38
2.5.2 Apprentissage ..................................................................................................................... 39
2.6 Classification et carte topologique ............................................................................................. 41

4
2.6.1 Etiquetage de la carte par données expertisées ................................................................. 42
2.6.2 Recherche d’une partition adaptée aux classes recherchées ............................................. 44
3. Méthode d’estimation du niveau de pollution à partir des types de temps .................................. 48
Introduction ....................................................................................................................................... 48
3.1 Les données de l’étude .............................................................................................................. 49
3.1.1 Les observations .................................................................................................................. 49
3.1.2 Les données modèles .................................................................................................... 50
3.2 Rôle des variables environnementales dans la relation PM10‐AOT ........................................... 51
3.3 Détermination des types de temps ............................................................................................ 56
3.4 Validation de la relation (PM, AOT) ........................................................................................... 62
3.4.1 Interprétation en « type de temps » .................................................................................. 62
3.4.2 Intérêt de l’utilisation des types de temps .......................................................................... 66
3.5 Qualité prédictive de la méthode .......................................................................................... 72
3.6 Discussion et conclusion ........................................................................................................ 74
4. Validation de la méthodologie : télédétection satellitaire de la pollution. ................................... 77
Introduction ....................................................................................................................................... 77
4.1 Les données de l’étude ............................................................................................................... 77
4.2 Détermination des types de temps ........................................................................................... 79
4.3 Validation de la relation (PM, AOT) .......................................................................................... 88
4.3.1 Interprétation en « type de temps » .................................................................................. 88
4.3.2 Intérêt de l’utilisation des types de temps .......................................................................... 94
4.4 Mise au point de huit fonctions prédictives de la pollution ..................................................... 101
4.5. Application satellitaire pour un événement de forte pollution ............................................... 107
Conclusion ....................................................................................................................................... 111
Conclusion générale ............................................................................................................................ 113
Références ........................................................................................................................................... 115

5
Introduction générale
La prévision des situations de pollution atmosphérique est une nécessité de notre société. En effet, ces situations, sont d’année en année passées d’un stade accidentel à un problème fréquent de santé publique. A ces considérations de santé publique, il faut ajouter leurs influences sur le climat.
Les aérosols, particules solides ou liquides en suspension dans l’atmosphère à l’exception des gouttelettes nuageuses, jouent un rôle complexe sur le bilan radiatif, défini comme la différence entre l’énergie entrante (solaire) et sortante (solaire et tellurique) du système Terre‐atmosphère. On parle de forçage radiatif lorsqu’un facteur extérieur au système climatique entraine un déséquilibre de ce bilan radiatif. Le forçage radiatif des aérosols est défini comme la modification du bilan radiatif terrestre qui résulte de la présence d’aérosols introduits par les activités humaines actuelles, comparé à la situation qui existait en 1750. Le forçage radiatif est dit positif lorsqu’il y a réchauffement du climat, et il est dit négatif en cas de refroidissement.
Les particules d’aérosols influencent le bilan radiatif terrestre en diffusant et en absorbant le rayonnement terrestre incident (effet direct), et en modifiant les propriétés radiatives et la durée de vie des nuages (effet indirect) [Forster et al. 2007]. La combinaison de l’action directe et indirecte sur le rayonnement solaire va dans le sens d’un refroidissement de la Terre (forçage radiatif négatif), puisqu’il y a moins d’énergie arrivant au sol. L’action sur le rayonnement infrarouge, par contre, a un effet comparable aux gaz à effet de serre (un forçage radiatif positif). La Figure 1, résume les différentes valeurs attribuées aux divers forçages (le forçage radiatif du aux aérosols est estimé en moyenne à ‐1.3 W.m2), en leur attribuant un niveau de connaissances qualitatif (LOSU : Level Of Scientific Understanding).

6
Figure 1– Estimations des forçages radiatifs des différents composants de l’atmosphère et incertitudes associées (rapport IPCC 2007, [Forster et al., 2007]).
Notons que l’estimation de l’effet direct total des aérosols est actuellement mieux précisée [Forster et al., 2007] qu’auparavant [Ramaswamy et al., 2001], car elle s’appuie sur une combinaison de simulations de modèles et d’observations (mesures au sol, aéroportées et satellitaires), alors que l’évaluation précise de l’effet indirect est plus délicate car elle nécessite de connaitre précisément les propriétés optiques du nuage avant interaction avec les aérosols.
D’un autre coté, l’appareil respiratoire est l’organe cible dans lequel les particules vont pénétrer plus ou moins profondément selon leur taille, les plus petites pouvant atteindre le compartiment le plus distal. De nombreuses études ont montré le rôle des particules en suspension dans certaines atteintes fonctionnelles respiratoires, le déclenchement de crises d’asthme et la hausse du nombre de décès pour cause cardio‐vasculaire ou respiratoire. On considérera en effet comme acquise les conclusions de l’OMS [OMS, 2006], qui indiquent

7
que « Les données sur les particules en suspensions dans l’air et leurs effets sur la santé publique sont uniformes1 et montrent des effets indésirables sur la santé, aux expositions auxquelles les populations urbaines sont actuellement soumises dans les pays développés, comme dans les pays en développement ».
L’éventail des effets sur la santé est large, mais ce sont surtout les systèmes respiratoires et cardio‐vasculaires qui sont affectés. L’ensemble de la population est touché, mais la sensibilité de la population peut montrer des variations selon l’état de santé et l’âge. On a montré que le risque augmentait avec l’exposition pour diverses pathologies et rien ne permet de penser qu’il existe un seuil au‐dessous duquel on pourrait s’attendre à ce qu’il n’y ait aucun effet indésirable sur la santé [….]. Les données épidémiologiques montrent des effets indésirables des particules suite à des expositions à court et à long terme».
Pour les effets à court terme, plusieurs études (AFHEA2 pour l’Europe et PSAS93 pour la France) ont montré que, pour une augmentation de 40 µg/m3 des concentrations de particules sur une journée, un accroissement de la mortalité cardio‐vasculaire (+2%) et respiratoire (+4%) ainsi que des hospitalisations pour maladies respiratoires chez les enfants de moins de 14 ans (+8%).
Les effets à long terme sont plus difficiles à évaluer car il faut caractériser l’exposition d’une population sur toute une vie. Néanmoins, des études récentes montrent l’impact d’une exposition modérée aux particules sur des adultes sains : augmentation de la mortalité cardiovasculaire notamment et des hospitalisations à proximité des grands axes de circulation. Selon l’étude APHEIS4 , une réduction de 5 µg/m3 en moyenne annuelle des particules de diamètre inférieure à 10 µm se traduirait par une diminution du nombre de décès : 19 pour 100 000 habitants. A Strasbourg, ce serait ainsi 40 à 90 vies sauvées chaque année (1500 pour la France).
La réglementation en la matière a très vite évolué5, à défaut de pouvoir éliminer totalement ce problème, l’accent est mis sur la meilleure possibilité d’enrayer son développement
1 « uniforme » est le terme employé par l’OMS, et peut être interprété comme « cohérent ».
2 Impact sanitaire de pollution atmosphérique urbaine – rapport 1 : Estimation de l’impact lié à l’exposition chronique aux particules fines sur la mortalité par cancer du poumon et par maladies cardio‐respiratoires en 2002 avec projections d’ici 2020. Afsse, mai 2004.
3 Indicateur sanitaire : décès anticipés (hors causes accidentelles)
4 « Particules » est entendu ici comme indicateur de la pollution atmosphérique, n’excluant donc pas l’influence de co‐polluants.
5 Au niveau européen sont apparues des directives fortes concernant les objectifs à court et moyen terme que devront atteindre les états membres en ce qui concerne l’environnement en général et la qualité de l’air en particulier. Par exemple, la directive du Conseil du 22/02/1999 impose une valeur limite de la concentration

8
rapide. La concentration massique en particules de diamètre aérodynamique inférieure à X µm (PMX en µg/m3) est utilisée comme mesure pour établir des indices de qualité de l’air. Elle se fait par l’intermédiaire d’un réseau de stations fixes réparties sur l’ensemble du territoire (environ 700 stations de mesure dotées d'instruments automatiques), nous utiliserons dans ce travail, les mesures de PM10, standard de mesure de qualité de l’air. Il est à noter, que la taille des particules est un critère essentiel, car elle détermine, leur temps de séjour dans l’air ainsi que la profondeur de la pénétration dans l’arbre pulmonaire6.
Figure 2– Pénétration des particules dans l’appareil respiratoire humain en fonction de leur diamètre.
des aérosols égale à 50 μ g /m3 qui ne peut être dépassée que pendant 35 jours par an, en moyenne
journalière, et ce avant le 01/01/2005. La norme devient encore plus stricte en 2010, quand le nombre de dépassement admissible diminuera à 7.
6 Les particules les plus grosses (>10 μm) se déposent rapidement et sont retenues au niveau du nez et des voies aériennes supérieures. Dans cette catégorie sont rassemblées, entre autres, les particules biologiques (spore, bactérie, pollen…). • Les particules de taille intermédiaire (entre 2,5 μm et 10 μm) se déposent au niveau de l’arbre trachéo‐bronchique et peuvent être éliminées par la toux. • Les particules fines (< 2,5 μm) atteignent en grand nombre les alvéoles pulmonaires.

9
Selon les critères nationaux, seuls les (PM10) sont réglementés. L’objectif de qualité fixé dans le décret 2002‐2013 du 15 février 2002 est de 30 µg.m‐3 en moyenne annuelle. Deux types de valeurs sont également définis dans ce décret sur les moyennes journalières et sur les moyennes annuelles de (PM10). Les valeurs limites en vigueur depuis le 1er janvier 2005 sont en tous points conformes à celles fixées dans la phase I de la directive 1999/30/CE du 22 avril 1999 du Conseil de l’Union Européenne.
Cependant, la plupart des stations de surveillance de la qualité de l’air sont proches de zones urbaines et laissent de larges régions sans observations opérationnelles. Un meilleur échantillonnage spatial représenterait donc une avancée importante dans la surveillance de la pollution. Le recours à la télédétection apparaît comme une manière d’obtenir cet échantillonnage, encore faut‐il que la détection de la pollution soit possible à distance. Dans ce travail, nous chercherons à répondre à la question suivante : « les PM10 peuvent‐ils être télé détectés ? ».
Les mesures d’épaisseur optique de l’atmosphère (ou Aerosol Optical Thickness, AOT), permettent la surveillance globale du contenu atmosphérique en aérosols. Elles représentent l’atténuation du rayonnement solaire intégré sur toute la colonne atmosphérique. Du point de vue de la physique de la mesure, des relations existent, qui mettent en correspondance la concentration massique et la mesure de l’épaisseur optique en aérosol. La détermination des épaisseurs optiques (AOT) est effectuée par des photomètres au sol et des radiomètres embarqués à bord de satellites (MERIS, MODIS, POLDER). Une estimation des PM10 avec une couverture spatiale régulière serait donc accessible s’il s’avérait possible de trouver une relation liant les deux quantités (PM10, AOT). Cette relation est caractérisée par sa très forte dépendance à la situation géographique et aux conditions météorologiques : la relation ne sera pas la même en hiver ou en été, à Lille ou à Marseille. Toutes les études soulignent les difficultés importantes à vaincre pour que la prédiction soit suffisamment précise et permette une exploitation opérationnelle. Les difficultés sont multiples et proviennent à la fois :
• de la variabilité de la relation qui dépend d’un grand nombre d’autres phénomènes
physiques
• des grandeurs physiques mesurées qui n’observent pas le même phénomène :
mesure au sol pour les PM10 (concentration massique des PM10 à 2m du sol), ou une
grandeur intégrée sur la colonne atmosphérique pour les AOT
• de la précision des mesures
• d’un échantillonnage spatial et temporel différent pour chacune des grandeurs

10
• Pour répondre à ces difficultés, cette thèse propose une méthode originale
permettant en particulier une approche pertinente en terme de relation (PM10, AOT)
basée sur une classification des situations météorologiques en types de temps. Nous
utiliserons pour cela des réseaux de neurones artificiels : les cartes auto‐
organisatrices. Les réseaux de neurones ont déjà montré leur utilité dans de
nombreux problèmes de télédétection appliquée aux sciences de l’environnement.
L’algorithme utilisé pour ce travail et qui constitue le cœur de la thèse permet de mettre en évidence des situations météorologiques typiques (types de temps) pour lesquelles la relation (PM10, AOT) est simplifiée, car dépendante au deuxième ordre des paramètres météorologiques.
Nous commençons par décrire la physique des aérosols (Chapitre 1) et les différentes méthodes, modèles et instruments utilisés dans cette thèse (Chapitre 2). Dans le Chapitre 3 la méthode est présentée en détail, et nous la validerons de manière qualitative et quantitative.
Enfin, le quatrième chapitre consiste à généraliser cette méthode sur une période de temps de plusieurs années et nous démontrons sa capacité de prédiction en utilisant comme mesure de validation des AOT au sol ainsi que satellitaires.

11
1. Définition et physique des Aérosols
Introduction L’atmosphère est l’enveloppe gazeuse qui entoure la planète terre. Elle est composée d’azote (78%), d’oxygène (20.94%), de vapeur d’eau, de gaz carbonique (CO2), de gaz rares et de toute une série de composés en faible concentration. Les teneurs en vapeur d’eau, CO2 et CH4 (méthane), ont des implications environnementales importantes, ils constituent les principaux gaz à effet de serre. En particulier, les concentrations croissantes de CO2 et CH4 au cours de ces dernières années en font des polluants globaux au niveau climatique. A cette composition gazeuse naturelle de l’atmosphère, viennent s’ajouter des polluants plus locaux, émis principalement par l’industrie, le chauffage domestique et le trafic automobile. Parmi les polluants primaires (directement émis par les sources), le SO2, les NOx et les composés organiques volatiles (COV) tiennent une place prépondérante. Dans l’atmosphère, ces polluants primaires réagissent entre eux, avec la vapeur d’eau et le rayonnement solaire, de sorte qu’une production photochimique de polluants secondaires a lieu. Le polluant secondaire le plus important aujourd’hui est l’ozone, dont la concentration peut atteindre 300 mg/m3, créant des épisodes de pollution en milieu urbain en été. En plus des gaz, l’atmosphère contient différentes particules (fines, solides, liquides ou mixtes). La Figure 1.1 donne une classification schématique des principales particules présentes dans l’atmosphère. Par définition, les aérosols7 sont de fines particules liquides ou solides de taille inférieure à 100 μm à l’exception des particules nuageuses (brouillard, glace, neige et pluie, ceux‐ci étant généralement définis par le terme « hydrométéores »), comme par exemple les pollens, les poussières minérales, les gouttes d’eau composant les nuages, les condensations des émissions nitreuses et sulfuriques des industries ou des volcans et enfin les particules de suie issues de la combustion incomplète de produits inflammables (chauffage, carburants automobiles et plus précisément le diesel).
7 Le terme « aérosol » a été inventé par M. SCHMAUSS en 1920. Il désigne la suspension, dans le milieu gazeux, de particules solides ou liquides, ou les deux, présentant une vitesse de chute négligeable.

12
Figure 1.1 ‐ Classification et taille des particules présentes dans l’atmosphère.
Figure 1.2 – Quelques images d’aérosols Les aérosols dits primaires sont injectés dans l’atmosphère sous leur forme définitive. On peut citer par exemple les aérosols de poussière désertique, les sels marins ou les cendres volcaniques. Les aérosols secondaires subissent eux des transformations chimiques, qui les font passer de la phase gazeuse à la phase particulaire, par condensation. C’est le cas par

13
exemple des sulfates qui proviennent de l’oxydation du dioxyde de soufre ou du soufre émis lors des éruptions volcaniques qui forment ensuite de l’acide sulfurique dans la stratosphère. Une fois dans l’atmosphère, les aérosols continuent à évoluer, formant une population mélangée de façon externe (chaque particule est un aérosol d’un type donné) ou interne (une particule peut être constituée de plusieurs espèces chimiques à la fois). Après une durée de vie typique d’une semaine dans la troposphère, les aérosols retombent au sol sous l’effet de la gravité (dépôt sec), ou lors de précipitations (dépôt humide). En plus d’avoir des sources et des tailles très différentes, les divers aérosols ont des compositions chimiques et des formes qui varient très fortement. La diffusion et l’absorption de la lumière par un aérosol seront donc différentes selon son type et sa taille.
1.1 Caractéristiques physiques des aérosols 1.1.1 Composition chimique
De part leur origine, leur formation et leur évolution dans l’atmosphère, les aérosols sont très différents. La figure 1.3 présente un aérosol au microscope électronique, ou l’on peut observer de fines particules de suie imbriquées dans une plus grande particule contenant essentiellement du sulfate et du nitrate. Il parait alors difficile de décrire cet aérosol, d’autant qu’il existe une incertitude quant à sa forme dans l’atmosphère du fait des artefacts de mesures : en effet, les aérosols sont instables et asséchés quand on les soumet au microscope électronique, et il est probable que l’aérosol observé n’est pas l’aérosol réel.

14
Figure 1.3 – Image au microscope électronique d’un aérosol constitué de particules de suie (flèches) dans une particule de sulfate et de nitrate [G.Gorzawski et G.Helas (Max Planck
Institute)].
Deux grandes catégories de particules qui se distinguent par leur mode de formation existent :
Les aérosols primaires sont émis directement dans l’atmosphère sous forme solide ou liquide. C’est le cas par exemple des aérosols minéraux arrachés des surfaces désertiques par le vent (émission par un processus de type mécanique).
Les aérosols secondaires sont quant à eux issus de processus de conversion des composés gazeux en particules. C’est le cas par exemple des aérosols de sulfate formés à partir du dioxyde de soufre (SO2).
Le Tableau 1.1, présente les différents types d’aérosols ainsi que les quantités émises dans l’atmosphère pour l’année 2000.
Origine Sources Estimation de l’intensité (Tg/an)
Naturelle 94%
Primaires Poussières minérales
Sels de mer Poussières volcaniques Débris biogéniques
Carbone suie
Secondaires Sulfates biogéniques et volcaniques Aérosols organiques secondaires
Nitrates
Total
2150 3340 33 56 5.7 78 16 3.9
5682.6
Anthropique 6%
Primaires Carbone suie
Poussières industrielles
Secondaires Sulfates anthropiques Nitrates anthropiques Aérosols organiques
Total
6.6 100
122 14.2 0.6
243.4 Total 5926

15
Tableau 1.1 ‐ Estimation des flux d’émission moyens annuels en masse de différents types d’aérosols pour l’année 2000 (rapport IPCC. 2001). Le téragramme est défini par
(1Tg=1012g).
Comme on peut le remarquer dans le tableau, la grande majorité des aérosols présents en masse dans l’atmosphère est d’origine naturelle (94%) contre 6% d’origine anthropique. Dans ce tableau, nous distinguons quatre catégories principales d’aérosols :
• les poussières minérales, ayant pour origine les zones arides et semi‐arides de la planète. L’érosion par le vent est à l’origine de la production primaire de ces aérosols. Le désert du Sahara est la principale source de ces aérosols.
• les aérosols marins (ou sels de mer), produits à partir du frottement du vent sur la surface de l’océan.
• les sulfates et les nitrates, les aérosols sulfatés sont principalement produits par des réactions chimiques à partir de gaz précurseurs comme le dioxyde de soufre. Les aérosols nitratés sont formés au cours de réactions chimiques des oxydes d’azote. La concentration de ces aérosols est très importante au‐dessus des zones urbaines et industrielles.
• les aérosols carbonés, provenant de la combustion de biomasse, de la production d’énergie (fumées industrielles) ou du transport automobile. Ces aérosols sont composés de carbone suie et de carbone organique.
Les sulfates, les nitrates et les aérosols carbonés proviennent en majeure partie de sources humaines et sont en général de petite taille (inférieure au micromètre). En revanche, les poussières minérales et les sels marins sont en majorité d’origine naturelle et constitués de particules comparativement plus grosses.
1.1.2 Granulométrie Les particules de l’aérosol atmosphérique couvrent une gamme de taille très étendue, de quelques angstrœms (un 10 milliardième de mètre) à quelques dizaines de µm (micromètres). Cette taille varie selon la nature et la source de production des particules et en fonction des réactions que subissent les aérosols durant leurs temps de résidence dans l’atmosphère (nucléation, coagulation, et condensation de gaz vers l’état particulaire). Pour caractériser cette population complexe, on introduit le concept de distribution, qui représente la fraction de masse (dM), de surface (dS) ou de nombre (dN) dans un petit intervalle de dimension dr, c.‐à‐d qu’on peut séparer le spectre de taille en intervalles fixes, et compter le nombre ou la masse des particules dont le diamètre est dans cet intervalle. Comme, la dimension des particules n’est pas facile à déterminer étant donné la variété des formes, la notion de diamètre aérodynamique d’une particule à été élaborée. Il correspond au diamètre équivalent d’une particule sphérique de masse volumique de 1g cm‐3 (masse

16
volumique de l’eau) qui aurait la même vitesse de chute dans l’air calme que la particule à l’étude.
On peut aussi remarquer, expérimentalement qu’il existe plusieurs modes dans la distribution en taille. La Figure 1.4, présente la distribution en masse d’une population de particules de diamètre aérodynamique différent, elle montre les trois modes les plus couramment observés : le mode de nucléation (aussi appelé « ultrafin », ou « d’Aitken », A), d’accumulation (B) et grossier (C).
Le mode de nucléation(A), correspondant à des particules dont le rayon physique est inférieur à 0.05 µm issues de la condensation de gaz autour d’un noyau de condensation. Ce sont de très petites particules, notamment par rapport aux longueurs d’ondes des rayonnements solaires et thermiques. Optiquement peu actives, on néglige souvent leur impact radiatif. Entre 0.05 µm et 1 µm se trouve le mode d’accumulation (B) qui résulte de l’agrégation de particules plus petites, de la condensation de gaz ou de la ré‐évaporation de gouttelettes. Enfin, les particules d’un diamètre supérieur à 1 µm se trouvent dans un mode dit grossier (C), qui est formé généralement des particules primaires et constitué de poussière minérale, de sel de mer et de nitrate.
Une distribution en taille observable près d’une source d’aérosol est souvent monomodale. Lorsque le temps de résidence dans l’atmosphère augmente, ou que deux sources locales produisent des aérosols différents, la distribution en taille devient bimodale, parfois trimodale.
Sur cette courbe (Figure 1.4) ont constate que les particules de très petites tailles ne pèsent rien. Si on établit le même genre de courbe en ordonné, le nombre de particules, on obtient quasi exactement le graphique opposé car les microparticules sont les plus nombreuses.

17
Figure 1.4 – Présentation simplifiée de la distribution en masse d’une population de particules de diamètres aérodynamiques différents. (A) : particules ultrafines ; (B) : mode d’accumulation et (C) : particules grossières. TPS = total des particules en suspension.
Mathématiquement, la loi log‐normale permet de bien caractériser une population couvrant une large gamme de taille. La détermination du nombre de particules n en fonction du logarithme népérien du rayon (r) s’écrit alors :

18
(1.1)
Ou n(r) est le nombre de particules dont le logarithme népérien du rayon est compris entre ln(r) et ln(r)+d(ln(r)), r0 est le rayon modal, σ0 l’écart‐ type du logarithme népérien du rayon (la largeur de la distribution) et n0 est le nombre de particules se trouvant dans le mode considéré. Une distribution multi‐ modale sera simplement décrite par une somme de log‐normales.
Il n’est pas toujours adéquat de s’intéresser à la distribution du nombre de particules. La distribution de la surface convient mieux si l’on s’intéresse aux réactions chimiques dans lesquelles interviennent les aérosols. Si l’on cherche à évaluer la masse des aérosols, la distribution du volume V sera intéressante. Celle‐ci s’écrit
(1.2)
Ou r1 et σ1 sont définis de la même façon que précédemment, et V0 est la concentration totale en volume des particules. Sachant que le rayon modal de la distribution de la nième puissance du rayon est donné pour la loi log‐normale par r0 exp(n ) et que les écarts‐types
restent inchangés (σ0=σ1), on passe du rayon modal de la distribution en volume, r1 à celui de la distribution en nombre, r0 de la manière suivante :
(1.3)
r1 est supérieur à r0, ce qui traduit le fait que la distribution du volume est décalée vers les grosses particules, qui y contribuent le plus. En effet, un aérosol de 10µm de diamètre pèse un million de fois plus qu’un aérosol de 10 nm. La masse est donc concentrée sur les gros aérosols, tandis que le nombre a tendance à être élevé pour des classes de petite taille.
1.2 Caractéristiques optiques des aérosols
Le spectre des radiations reçues du soleil par la surface terrestre diffère de celui émis par le soleil. En effet, une partie de ces radiations est atténuée par les constituants de l’atmosphère (particules, gaz) qui affectent l’intensité de ce rayonnement par deux mécanismes qui sont la diffusion et l’absorption (Voir Figure 1.5).

19
Figure 1.5 ‐ Présentation simplifiée de l’absorption et de la diffusion d’un rayon solaire.
Il est à noter que la diffusion dépend de la taille des particules par rapport à la longueur d’onde incidente. Lorsque la taille des particules est de l’ordre de la longueur d’onde incidente, on par parle de diffusion de Mie [1908, L] et c’est le cas des aérosols atmosphériques en présence d’un rayonnement solaire. Cette diffusion se produit la plupart du temps dans la partie inférieure de l’atmosphère où les grandes particules sont plus abondantes (La diffusion de Mie est à l’origine de la couleur blanche des nuages).
Par contre, les longueurs d’onde des spectres solaires et telluriques étant bien supérieures aux dimensions des molécules de gaz (les petites particules de poussière, molécules d’azote et molécules d’oxygène), la diffusion suit dans ce cas la théorie de Rayleigh[1889]. La diffusion de Rayleigh est le mécanisme dominant dans l’atmosphère supérieur (Le bleu du ciel est une conséquence de la diffusion de Rayleigh sur les molécules d’air).
L’interaction aérosol‐rayonnement est complètement caractérisée lorsqu’on connait la
quantité de rayonnement qu’une population d’aérosols peut diffuser et absorber, la
contribution de l’absorption à cette extinction, et la distribution angulaire de la diffusion. Les
quantités correspondantes sont respectivement l’épaisseur optique, l’albédo de diffusion
simple et la fonction de phase.
1.2.1 Epaisseur optique et coefficient d’Angström L’efficacité d’extinction d’une particule, notée Qext , est le rapport entre la section efficace d’extinction (Sext)et la section géométrique de la particule, elle est donnée par πr2 pour une particule sphérique de rayon r. Cette dernière est dépendante, de, l’indice de réfraction η, la taille de la particule r, la longueur d’onde λ, et l’altitude z.
(1.4)
Rayon absorbé
Rayon diffusé Rayon transmis

20
De la même manière, on définit l’efficacité de diffusion Qdif et d’absorption Qabs . Ces trois quantités vérifient par définition de l’extinction Qext=Qdif+Qabs (sans unité). Pour un ensemble d’aérosols supposés sphériques caractérisés par sa distribution en taille (en toute rigueur, dépendante de l’altitude), le coefficient d’extinction, σext (z,λ)(m‐1) s’écrit :
(1.5)
L’indice de réfraction η représente une propriété optique majeure de l’aérosol puisqu’il intervient dans l’extinction de la lumière en déviant la direction du rayonnement incident et/ ou en l’absorbant, il est relié directement à la composition chimique de l’aérosol ainsi qu’a l’humidité relative (la condensation de la vapeur d’eau à la surface de l’aérosol entraine une diminution de son indice de réfraction qui va tendre vers celui de l’eau) et à la longueur d’onde. Sa partie réelle Re(η) fixe la vitesse de propagation dans le milieu et renseigne sur la déviation de la lumière par la particule, alors que sa partie imaginaire Im(η), est reliée aux propriétés d’absorption des aérosols.
On peut obtenir l’épaisseur optique en intégrant σext entre deux altitudes zmin et zmax
(1.6)
Comme l’épaisseur optique est habituellement celle de la colonne atmosphérique, zmin et zmax sont respectivement égaux à 0 et + .
La dépendance spectrale de l’extinction est intéressante car elle renseigne sur la taille de la particule diffusante. Elle est mesurée par le coefficient d’Angström [1964] noté , défini par
Pour représenter la dépendance spectrale de τext(λ), on introduit un nouveau paramètre, le coefficient d’Angström a [Angström, 1964], tel que :
(1.7)
Généralement on prend λj égal à 865 nm, ce qui permet de décrire la dépendance spectrale
de τ par rapport à τ(865) qui est utilisé comme indicateur de la concentration en aérosols.
Plus le coefficient d’Angström est grand et plus la particule est petite ; plus la dépendance spectrale est grande ; les aérosols ont des coefficients d’Angström compris entre 0 (très grosses particules) et 3 (très fines particules). Une population de grosses particules dont le

21
nombre est distribué sur un seul mode peut avoir un coefficient d’Angström légèrement négatif.
En fait les phénomènes sont beaucoup plus compliqués : A la diffusion simple, vient se superposer la diffusion multiple due au fait que la lumière diffusée dans une direction peut être diffusée une seconde fois dans la direction de propagation. Ce phénomène compliqué à modéliser fait intervenir l’indicatrice de diffusion qui tient compte de la distribution angulaire de diffusion.
1.2.2 Albédo de diffusion simple
La part de la diffusion dans l’extinction est donnée par l’albédo de diffusion simple w0. Pour une population d’aérosols, il correspond au rapport entre le coefficient de diffusion σdiff et le coefficient d’extinction σext. Pour un aérosol non absorbant (w0=1). Dans le visible, la plupart des aérosols sont peu absorbants, avec des albédos de diffusion simple supérieurs à (0.9). Certains aérosols contenant une part importante de carbone suie ont toutefois une absorption plus grande, les propriétés d’absorption sont directement reliées à la composition chimique de l’aérosol et à la partie imaginaire de l’indice de réfraction. Plus cette dernière est élevée, plus l’aérosol est absorbant et plus l’albédo de diffusion simple est petit.
Des développements plus complets de cette présentation simplifiée sont donnés dans la thèse de [MeloëKacenelenbogen‐Tilot (2008)].
1.2.3 Fonction de phase La distribution angulaire de la diffusion d’une particule de rayon r est donnée par la fonction de phase P (Θ,r) ou Θ est l’angle de diffusion. Cette grandeur (divisée par 4π) représente la probabilité de diffusion du rayonnement incident dans le cône d’angle solide dΩ. Cette fonction est normalisée de la façon suivante :
(1.8)
La figure (1.6) montre la distribution angulaire de la diffusion d’une particule suivant sa taille. On y observe une diffusion vers l’avant des grosses particules (d=1µm) par rapport aux fines particules (d=0.01 µm). Cette figure décrit aussi l’angle de diffusion Θ de la particule défini entre l’onde du rayonnement incident et diffusé.

22
Figure 1.6‐ Distribution angulaire de la diffusion d’une particule suivant sa taille.
1.2.4 Théorie de Mie La diffusion d’un rayonnement incident par une particule à symétrie sphérique ou un cylindre infini à été formalisée par Mie [1908]. D’après cette théorie, l’extinction par une particule ne dépend que de son indice de réfraction complexe m et d’un paramètre de taille, noté x et égale à 2π/λ ou r est le rayon de la particule et λ la longueur d’onde du rayonnement. Le code Mie basé sur l’algorithme donné par Wiscombe[1980], permet de calculer, pour une distribution en taille log‐normale, l’épaisseur optique, l’albédo de diffusion simple et la fonction de phase.
1.3 Distribution verticale des aérosols L’atmosphère terrestre est l’enveloppe gazeuse entourant la Terre. Différentes couches peuvent être distinguées selon trois propriétés (Figure 1.7).

23
Figure 1.7 –Profils des différentes couches de l’atmosphère terrestre (N =neutrosphère), d’après [Aumont (2005)].
• Les propriétés dynamiques (en vert) : L’homosphère (0‐80 Km) désigne la couche ou la diffusion turbulente domine et permet une répartition homogène des espèces chimiques. L’hétérosphère (80‐500 Km) est une couche très stable dynamiquement. La diffusion moléculaire et la gravité régissent la répartition volumique horizontale des constituants atmosphériques dans cette couche. Les composés sont discriminés verticalement en fonction de leur densité. Les gaz les plus légers, tels que l’hélium, l’hydrogène et l’azote prédominent dans l’hétérosphère.
• Les propriétés électromagnétiques (en bleu) : L’ionosphère est une couche de gaz ionisé contenant une quantité importante d’électrons libres. Elle s’étend de 80 Km à 500 Km environ. La densité électronique passe par plusieurs maxima situés vers 100 Km, 180 Km et 350 Km d’altitude. Par opposition, la neutrosphère (N) s’étendant de la surface jusqu’ à la limite inférieure de l’ionosphère.
• Les propriétés thermiques (en rouge) : Le profil vertical de température permet de diviser l’atmosphère en cinq couches : la troposphère, la stratosphère, la mésosphère, la thermosphère et l’exosphère.

24
La troposphère est une couche de fluide hétérogène, dynamiquement très active ou se déroule l’essentiel des phénomènes météorologiques. Son épaisseur varie entre environ 7 à 8 Km aux pôles terrestres et 16 à 18 Km à l’équateur. Elle se caractérise par son gradient de température négatif et par de forts mouvements horizontaux et verticaux correspondant respectivement à l’advection et à la convection thermique des parcelles d’air. L’Organisation Mondiale de la Météorologie (OMM) définit son sommet, la tropopause, comme étant la région de l’atmosphère ou la température décroit de moins de 2°C/Km sur une épaisseur d’au moins 2 Km.
Ensuite la stratosphère s’étant de la tropopause à la stratopause (45 à 55 Km). Le gradient thermique est nul au niveau de la tropopause puis devient positif avec l’altitude jusqu’à ce que la température atteigne 0°C. La stratosphère contient 90% de l’ozone atmosphérique. On peut signaler que son gradient thermique positif est lié à l’absorption par l’ozone moléculaire du rayonnement de longueur d’onde inférieure à 270 nm. Cette couche d’ozone nous protège du rayonnement UV dangereux pour la santé et la végétation.
Dans la thermosphère, la température croit à nouveau avec l’altitude jusqu’à son sommet la thermopause dont l’altitude varie entre 350 et 900 Km. Il faut noter qu’entre 100 et 150 Km d’altitude, l’oxygène moléculaire absorbe le rayonnement ultraviolet de longueur d’onde située entre 100 et 200 nm. On observe ainsi une augmentation de la température avec l’altitude qui oscille entre 300°C et 1600°C au sein de la couche. La variation de l’altitude de la thermopause et de la température entre 100 et 150 Km est fonction de l’activité solaire.
L’exosphère est la dernière couche de l’atmosphère terrestre. L’altitude de la base de l’exosphère ou exobase varie entre 350 et 800 Km d’altitude en fonction de la température de la thermopause. L’hélium et l’hydrogène y sont les éléments prépondérants. Elle s’étend jusqu’à la limite extrême de l’atmosphère, soit 50 000 Km (de 30 000 Km aux pôles à 60 000 Km à l’équateur). C’est dans cette couche, que la plupart des satellites artificiels météorologiques ou de télécommunications sont placés en orbite, par exemple 1000km environ pour les satellites polaires héliosynchrones, et 36 000km pour les satellites géostationnaires.
C’est dans les deux premières couches, la troposphère et la stratosphère, que se manifeste principalement aujourd’hui la pollution de l’atmosphère. Parmi de nombreux facteurs climatologiques et météorologiques (vent, topographie locale, …..), la distribution verticale des aérosols est fortement influencée par la stabilité de l’atmosphère.
L’atmosphère est stable si une masse d’air, écartée de sa position d’équilibre, a tendance à y revenir ; cela dépend de la température de la masse d’air par rapport à l’air ambiant. Si la masse d’air soulevée est plus froide que l’air environnant, elle sera plus dense et redescendra à son niveau de départ. On dit, dans ce cas, que l’atmosphère est stable. La

25
structure thermique verticale de la troposphère tient alors une part importante dans la répartition des polluants.
La Figure 1.8 décrit la structure verticale simplifiée de la troposphère. On est, amené à distinguer dans la troposphère la couche d’air en contact avec le sol, dont l’épaisseur est de l’ordre de un kilomètre (mais variable avec les saisons, la latitude, l’altitude et la nature du sol, etc.). Elle est appelée la couche limite atmosphérique (abréviation : CLA).
FIG.1.8 ‐ Schéma de la structure verticale de la troposphère : la zone grise définie la Couche Limite Atmosphérique et le reste la troposphère libre.
Celle‐ci en raison de son contact avec le sol possède des propriétés particulières. Le vent est ralenti par le frottement du sol, la température varie pendant le cycle diurne. La force de Coriolis, due à la rotation de la Terre autour de l’axe des pôles, entraine une rotation de la direction du vent de l’ordre de 25 degrés entre le sol et le sommet de la couche. Il en résulte qu’un panache de polluants ne va pas se transporter dans la même direction en fonction de l’altitude où il se trouve. C’est aussi une couche où la turbulence va favoriser la dilution des polluants, mais cette turbulence dépend de la variation de la température en fonction de l’altitude, du vent, du relief, des obstacles sur le sol. On peut dès lors imaginer que la dilution des polluants près du sol dans toute la couche limite est un problème complexe.
Au dessus de la couche limite, dans la troposphère, entre 1 et 10 Km environ, se trouve un domaine que l’on appelle l’atmosphère libre. L’écoulement en première approximation est celui d’un système inertiel, sans interaction avec le milieu environnant, ceci pour une période de quelques jours.

26
Les premiers dizaines de mètres de la couche limite, prés du sol, constituent ce que l’on appelle la couche de surface. On est amené à la distinguer du reste de la couche parce qu’il est possible de la décrire avec des équations simplifiées, ce qui est bien sûr très utile lorsque l’on doit représenter mathématiquement les mouvements de l’air, ou les phénomènes atmosphériques. Dans le cas de la pollution atmosphérique, on utilisera, par exemple, les propriétés de la couche de surface pour mesurer et pour calculer les quantités de polluants qui se déposent sur le sol.
La couche limite est généralement plus fine dans le cas hautes pressions atmosphériques (supérieure à 1013hPa, conditions anticycloniques de ciel clair ou avec des nuages de beau temps) [Stull, 1988]. Dans le cas de hautes pressions, la structure verticale de la couche limite atmosphérique au cours de la journée est composée de 3 parties majeures : une couche de surface (ou « surface layer », environ 10% de la couche limite) à sa base, suivie d’une couche de mélange (ou « mixed layer ») et une zone d’entrainement (ou « entrainement zone »). Il est très difficile de définir une hauteur et une structure de couche limite dans le cas de basses pressions.
La température potentielle (Figure 1.9) montre habituellement une décroissance ou une valeur constante dans la couche de surface et la zone de mélange. On en déduit une atmosphère instable dans les deux premières couches et toute parcelle d’air chauffée à la surface par le soleil va s’élever jusqu’au sommet de la couche de mélange. Cette masse d’air ascendante est alors fortement freinée par une couche stable (zone d’entrainement au sein de laquelle la température potentielle augmente) qui fait office de « couvercle thermique ». On parle alors parfois de température d’inversion lorsque la stabilité de cette couche est importante.

27
Figure 1.9 ‐ Profil de température potentielle, Ha est la hauteur de la couche limite atmosphérique [Stull., 1988].
En conclusion dans le cas des hautes pressions, les particules émises au sol et transportées par les masses d’air se retrouvent contenues en majorité dans cette couche limite atmosphérique (CLA) et ne la traversent que très peu.
D’après Gras [1991], la distribution verticale de la concentration massique en aérosols montre habituellement une décroissance exponentielle avec l’altitude jusqu’à une hauteur Ha et un profil de faible intensité et plus ou moins constant au‐delà de cette altitude. Le profil de concentration massique en aérosols peut alors s’exprimer de la façon suivante :
(1.9)
Avec PM(0) la concentration massique à la surface et Ha l’échelle de hauteur ou se trouve la majorité des aérosols.
D’après Jaenicke [1993], il a été observé des valeurs de Ha égales à 900m dans le cas des sels marins, 2000 m pour les aérosols désertiques et 730m dans le cas des aérosols continentaux naturels (aérosols composés en majorité de particules primaires et de produits de l’oxydation d’ammonium et de sulfates qui forment le fond atmosphérique sur lequel se superpose l’émission d’aérosols anthropiques) [Deepak and Gali, 1991]. Notons que l’intégration du profil de concentration massique sur la verticale entre le sol et une altitude infinie est égale au simple produit de PM(0) par la hauteur d’échelle Ha :
(1.10)
Il est important de noter que cette distribution verticale n’est qu’une simplification grossière. Rappelons que la hauteur Ha n’est décelable facilement que dans le cas de conditions climatiques anticycloniques (hautes pression) favorisant un mélange homogène des particules dans la couche limite. Cette distribution verticale est, en réalité, contredite dans le cas, très fréquent, de multiples couches d’aérosols dans la couche limite atmosphérique et/ou un transport de particules en altitude au‐dessus de cette couche [MeloëKacenelenbogen‐Tilot (2008)].

28
2. Outils instrumentaux et Méthodes Statistiques
2.1 Introduction Le but de cette thèse est de trouver la relation entre la mesure de la concentration massique au sol PM10 (mesurée par micro pesée) et la mesure par télédétection d’un signal électromagnétique émis par une station au sol ayant interagi avec les aérosols (épaisseur optique), afin de pouvoir prévoir les concentrations massiques en PM10 à partir des mesures d’épaisseurs optiques. Nous décrirons dans cette partie la relation théorique existante entre les deux paramètres, ainsi que les facteurs capables d’influer sur cette relation. Nous présenterons ensuite les outils pour réaliser les mesures. Nous utiliserons au cours de cette thèse, des stations de mesure in situ pour mesurer les concentrations massiques des PM10 au sol, un photomètre solaire pour la mesure par télédétection depuis le sol de l’épaisseur optique, ainsi que deux modèles de prévisions. Nous utiliserons des simulations météorologiques données par le modèle météorologique (MM5) ainsi que des simulations de concentration massique PM10 données par le modèle de chimie‐transport CHIMERE.
La dernière partie de ce chapitre, présente un état de l’art des différents développements statistiques permettant de traiter notre problématique. Nous détaillerons une méthode, non linéaire, les cartes topologiques auto‐organisatrices, qui représentent la seconde grande famille de réseaux de neurones. Celles‐ci font partie de la famille des modèles dits à « apprentissage non supervisé ». Nous utiliserons cette méthode pour fabriquer un Algorithme de classification (auto‐organisation) dans un premier temps (Chapitre 3) ainsi que pour la classification et prévision dans un deuxième temps (Chapitre 4).
2.2. Relation entre concentration massique au sol et épaisseur optique (AOT)
Nous allons essayer tout au long de ce travail d’estimer la capacité des mesures par télédétection au sol à évaluer la pollution en aérosols (concentration massique µg/m3), il est donc nécessaire, dans un premier temps, d’étudier la conversion d’une épaisseur optique (sans unité) en une concentration massique au sol (µg/m3). Une présentation plus complète de cette partie est dans la thèse de [MeloëKacenelenbogen‐Tilot (2008)].

29
Il est possible d’écrire le coefficient d’extinction (introduit dans la section 1.2.1, équation 1.5), en fonction du profil vertical de concentration massique en particule noté PM(z) (µg/m3) et de la section efficace spécifique d’extinction en masse (m2/µg).
(2.1)
Il est à noter qu’il existe une relation liant la section efficace spécifique d’extinction
en masse à la section efficace d’extinction en nombre introduite dans le premier
chapitre (section 1.5.1, équation 1.4).
D’après la relation 1.6, du premier chapitre, l’épaisseur optique est définie par l’intégration du coefficient d’extinction σext(z,λ)sur la colonne atmosphérique. En combinant les deux équations (1.6) et (2.1), nous obtenons la relation (2.2)
(2.2)
Si on regroupe la population de particules en un même type d’aérosol, et les propriétés optiques et microphysiques de ce type d’aérosols sont considérées constantes sur la colonne atmosphérique, nous pouvons dire que la section efficace d’extinction spécifique est constante sur la verticale, ce qui nous permet de la sortir de l’intégrale de l’équation (2.2). Pour le profil de concentration massique des aérosols PM(z), il est supposé connu et décroit en exponentielle négative avec l’altitude (section 1.6) [Gras 1991]. Il est alors possible d’écrire la relation suivante.
(2.3)
Où Ha est l’échelle de hauteur ou se trouvent la plupart des aérosols et PM(0) est la concentration massique au sol qui correspond, dans notre cas, aux mesures de concentration massique des particules de diamètre aérodynamique inférieur ou égal à 10 µm (PM10 pour « Particulate Matter »). Il est donc permis de convertir une épaisseur optique en une concentration massique au sol grâce à la relation suivante :
(2.4)
Finalement, en supposant qu’il n’y ait aucune erreur sur la mesure connue de l’AOT, la conversion d’une AOT en une mesure de PM nécessite tout de même la connaissance :

30
‐ Des propriétés optiques et microphysiques du type d’aérosol considéré (densité volumique ρ de la particule, section efficace d’extinction, Sext(λ) obtenue grâce à un code de Mie, indice de réfraction η et distribution en taille des particules n(r)),
‐ De la répartition verticale des aérosols et notamment, dans le cas d’un profil exponentiel, de la hauteur d’échelle Ha.
2.3 Outils instrumentaux de mesure
2.3.1 Mesures in situ de qualité de l’air
En application des directives européennes, la France est ainsi tenue de mesurer les polluants sur l’ensemble de son territoire et d’informer la population en cas de dépassement des seuils prédéterminés (Section 1.3). La surveillance de la qualité de l’air est confiée en France à une quarantaine d’AASQA réparties sur tout le territoire. L’Agence de l’environnement et de la maitrise de l’énergie (ADEME) assure la coordination technique de cette surveillance et gère la base nationale de qualité de l’air. Le laboratoire central de la surveillance de la qualité de l’air (LCSQA) assure le soutien technique et scientifique des AASQA [M. Marquis et M. Gauharou, Certified air‐quality monitoring agencies].
Ces quarante AASQA mettent en œuvre 720 stations fixes de mesure sur l’ensemble desquelles sont implantés plus de 2200 analyseurs automatiques dédiés à la mesure des polluants de l’air (situation en 2002). En plus de la concentration massique des poussières en suspension de diamètre aérodynamique inférieur à 10 micron (PM10) et 2.5 micron (PM2.5), ces stations mesurent un certain nombre d’autres polluants atmosphériques comme l’ozone, le dioxyde de soufre(SO2), le dioxyde d’azote(NO2), le monoxyde de carbone(CO), les composés organiques volatils (COV : benzène,…). L’ensemble de ces mesures ponctuelles présentent l’avantage d’être disponibles en routine (www.atmonet.org), et de donner des valeurs horaires des différentes concentrations pour les lieux où elles sont implantées.

31
Figure 2.1 ‐ Emplacement des stations de mesures de concentrations en PM10 en France en 2006 [MeloëKacenelenbogen‐Tilot (2008)].
Toutes les stations de mesures sont équipées du même type d’instruments gravimétriques qui sont des instruments automatiques (quasi) continus afin de fournir un ensemble homogène de données à haute résolution temporelle (plusieurs mesures par minute). Les concentrations massiques sont mesurées soit à l’aide de la méthode par absorption de rayons ß (jauge ß), soit par la méthode de microbalance oscillante (« Tapered Element Oscillating Microbalance » ou TEOM). Cette dernière technique représente 70% du taux d’équipement pour la mesure des PM10 et 100% pour la mesure des PM2.5. Les instruments TEOM, développés par Rupprecht & Patashnick, sont composés d’une microbalance utilisant un élément conique oscillant à sa fréquence naturelle, et d’un microprocesseur. Les particules aspirées au moyen d’une pompe de prélèvement sont déposées sur le filtre disposé en haut du cône et en augmentant la masse du système, elles produisent une décroissance de la fréquence naturelle de vibration [Patashnick and Rupprecht, 1991]. Cette variation de fréquence est enregistrée en continu et convertie en variation de masse par le microprocesseur. La précision sur la mesure de concentration massique est de l’ordre de quelques μg/m3. Dans certaines conditions, il a été observé que les concentrations massiques mesurées par l'analyseur TEOM pouvaient être significativement plus faibles que celles mesurées par la méthode de référence pour l’air ambiant (méthode gravimétrique manuelle à température ambiante tel qu’utilisée, par exemple, par l’instrument PARTISOL). D’après de précédentes études [Van Loon et al., 2004; Charron et al., 2004 ; Hodzic et al., 2005], les concentrations en PM10 mesurées par l’instrument TEOM sous estiment le contenu réel en aérosols de 20 à 50 % selon la station et la saison (sous estimation plus forte en hiver). De nombreuses études attribuent principalement cette divergence des résultats à la volatilisation importante d’espèces particulaires semi‐volatiles dans le TEOM [Green et al.,

32
2001; Muir, 2000; APEG, 1999 ; Allen et al., 1997]. En effet, dans sa configuration standard, le TEOM collecte un aérosol sur un filtre chauffé à 50°C ; ce qui peut expliquer en partie la perte, par évaporation, des composés les plus volatils, comme le nitrate d’ammonium et comme certains composés organiques. Notons qu’une sous‐estimation par le TEOM observée plus faible en été s’explique alors par des températures ambiantes et instrumentales (50°C) plus proches.
2.3.2 Aeronet Photons La télédétection des aérosols au sol n’offre pas la couverture globale des instruments satellitaires. Cependant, elle apporte des mesures du rayonnement solaire direct et diffuse à de nombreux angles et dans de nombreux canaux, cela de manière continue et très fiable.
Le réseau Aeronet (Aerosol Robotic Network) et sa composante française Photons (PHOtométrie pour le traitement Opèrationnel de Normalisation Satellitaire) fédère plusieurs dizaines de photomètres identiques à travers le monde [Holben et al. 1998]. On dispose dans certains endroits (peu nombreux, il est vrai) de presque 9 ans de données. Les photomètres sont fabriqués par la société Cimel, basée à Paris. Ils disposent d’une roue porte‐filtres permettant d’effectuer des mesures dans huit canaux placés entre 300 et 1050 nm. Les longueurs d’onde de base sont 440, 670, 870, 940 et 1020 nm. Les données sont transmises via un satellite géostationnaire toutes les quatre heures à un centre de traitement unique situé au Goddard Space Flight Center de la NASA.
Figure 2.2 – répartition des stations photométriques du réseau Aéronet dans le monde.
La station de mesures située sur le toit du LOA (Lille, France) est également équipée de photomètres solaires appartenant au Service d’Observation PHOTONS. Le photomètre solaire est un instrument permettant la restitution des propriétés optiques et microphysiques des aérosols, intégrées verticalement sur la colonne atmosphérique. Les

33
mesures photométriques ne sont possibles que de jour lorsque le soleil est visible et en absence de nuages. Les mesures sont de deux types :
‐ Visée solaire : on vise le disque solaire avec l’appareil, et on mesure l’atténuation par l’atmosphère du rayonnement solaire direct. On peut remonter ainsi à l’épaisseur optique à partir de cette mesure par la loi de Bouguer :
(2.5)
Où L(λ) est la luminance mesurée après la traversée de l’atmosphère, L0(λ) est la luminance hors atmosphère et µ0 le cosinus de l’angle zénithal solaire, τ(λ) est l’épaisseur optique totale (molécules et aérosols). Ce type de mesure permet d’obtenir une valeur relativement correcte de l’épaisseur optique puisqu’on ne fait appel à aucun modèle d’aérosols pour la déterminer et on évite donc les incertitudes liées au modèle. Luminance du ciel : cette mesure regroupe deux visées différentes : le protocole « Plan principal », qui consiste à effectuer des mesures de la luminance du ciel dans le plan principal (voir Figure 2.3a) et le protocole « Almucantar» procède à des mesures pour un angle θv=θs, en effectuant une rotation complète en azimut (voir Figure 2.3b).
Figure 2.3a – Protocole de mesure Plan
principal.
Figure 2.3b – Protocol de mesure
Almucantar. Cela permet pour les deux protocoles d’obtenir la distribution angulaire de la luminance du ciel. L’application d’algorithmes d’inversion [Dubovik et King, 2000] permet ensuite d’obtenir la distribution en taille des aérosols, leur fonction de phase et leur albédo de diffusion simple. Les données de ce réseau sont publiques, accessibles en temps quasi réel, et très largement utilisées notamment pour la validation des observations satellitaires d’aérosols.
2.3.3 Satellites Les principaux algorithmes satellitaires d’observation des aérosols au‐dessus des terres utilisent des approches différentes :
‐ L’extinction solaire c’est à dire la mesure de l’atténuation par visée directe du soleil, elle permet surtout l’étude des aérosols stratosphériques.

34
‐ L’infrarouge thermique, elle utilise l’émission thermique de la terre et des particules.
Son principal avantage est la possibilité de réaliser des mesures la nuit, surtout au‐dessus de surface désertiques [Herman et al., 1997].
‐ La rétrodiffusion de la lumière, qui est basée sur la mesure du signal solaire réfléchi et/ou diffusé par le système « Terre‐atmosphère ». c’est la méthode la plus répandue pour la télédétection des aérosols. Elle mesure la lumière solaire réfléchie par le système Terre‐atmosphère (Figure 2.3), en rétrodiffusion, la lumière aux courtes longueurs d’ondes détectée par un satellite est ainsi composée de la radiation diffusée par l’atmosphère ((1) sur la Figure 2.3) dans la direction du capteur et la radiation solaire réfléchie par la surface de la Terre ((2) sur la Figure 2.4).
Figure 2.4 – Schéma représentant la contribution au signal en rétrodiffusion, (1) – Signal atmosphérique, (2) – Contribution de la surface.
Ces deux termes résultent à leur tour de différentes contributions qui sont représentées schématiquement sur la Figure 2.5.
Lorsqu’un capteur regarde un pixel à la surface de la Terre, il voit différentes contributions au signal mesuré. Tout d’abord au premier ordre, le capteur voit la contribution du pixel et la contribution de la lumière diffusée à travers une seule rétrodiffusion dans l’atmosphère. Au second ordre, le capteur voit la lumière diffusée par une série de diffusion (en avant et en arrière) dans l’atmosphère et les effets d’environnement. Ces différentes origines de la lumière captée par un satellite doivent être prises en compte dans la modélisation du signal afin d’en extraire de la manière la plus précise la quantité recherchée.

35
Figure 2.5 – Schéma des différentes contributions au signal mesuré en rétrodiffusion.
Toutes ces méthodes sont dites passives. A cela, on peut ajouter une méthode dite active qui consiste à l’utilisation de Lidar et qui permet surtout d’obtenir des informations sur le profil vertical des aérosols [Kaufmann et al., 2003].
Pour valider notre algorithme de prévision de PM10, nous utiliserons quelques images d’épaisseur optique mesurées par le capteur MERIS. Il est [Rast et al., 1999] embarqué sur la plateforme d’observation de la Terre ENVISAT 8(ESA) a été mis en orbite le 1er mars 2002. La mission première de MERIS est l’observation de la couleur de l’eau et secondairement, on l’applique à l’étude de l’atmosphère et de la surface terrestre. MERIS est un capteur hyper spectral comprenant 15 bandes (400‐900nm). Il a pour objectif une mission globale couvrant
8 http://envisat.esa.int

36
l’océan ouvert (résolution spatiale de 1200m) et une émission régionale couvrant les terres émergées et les zones côtières (résolution spatiale de 300 m).
2.4 Modèles Météorologique et de Chimie‐Transport CHIMERE (CTM en anglais) est un modèle eulérien tridimensionnel de chimie transport (http://www.lmd.polytechnique.fr/chimere/). Ce type de modèle traduit l’état de l’art des connaissances en physique et chimie de l’atmosphère et permet de simuler le transport et la chimie des différents polluants photochimiques sur des domaines locaux à globaux fixés dans l’espace. La version utilisée dans notre travail est celle notée « V200606A ». La documentation complète concernant cette version du modèle de chimie‐transport CHIMERE peut être consultée à l’adresse suivante : http://euler.lmd.polytechnique.fr/chimere, ainsi que des descriptions détaillées de diverses applications de CHIMERE peuvent être trouvées dans la littérature [ Schmidt et al., 2005 ; Vautard et al., 2007]. Il est à noter que CHIMERE est le modèle utilisé au sein de la plateforme PREVAIR19 afin d’assurer les prévisions quotidiennes nationales de la qualité de l’air. La maintenance de cette plate‐forme opérationnelle est assurée par l’Institut National de l’Environnement Industriel et des Risques (INERIS). CHIMERE est aussi utilisé au niveau régional par associations de la qualité de l’air : Airparif210, Air pays de Loire311 et l’ORAMIP412.
Le modèle CHIMERE requiert différents jeux de données en entrée :
• Un cadastre d’émission anthropique, décrivant les flux d’émission des différents polluants primaires pris en compte dans ce modèle. Dans notre cas, le cadastre utilisé est celui d’EMEP1213 (« Co‐operative program for monitoring and evaluation of the long‐range transmissions of air pollutants in Europe”,[Vestreng, 2003]).
• Des données d’occupation des sols (Global Land Cover), permettant d’une part le calcul des émissions biogéniques et d’autre part qui combinées aux données dynamiques permettent de calculer le dépôt sec des polluants au sol.
• Un mécanisme chimique condensé qui représente schématiquement l’évolution chimique des espèces.
9 http://www.prevai.org
10 http://www.airparif.asso.fr
11 http://www.airpl.org
12 http://www.oramip.org
13 http://www.emep.int

37
• Des conditions aux limites, décrivant le transport des polluants à travers les limites du domaine du modèle, CHIMERE utilise le modèle de climatologie GOCART [GINOUX et al., 2004].
• Des données dynamiques, issues du modèle météorologique MM5.
Le modèle météorologique MM5 est un projet développé par le Pennsylvania State University (PSU) et le National Center for Atmospheric Research (NCAR). Une description détaillée des paramètrisations du modèle peut être trouvée en ligne14. MM5 comporte une résolution spatiale horizontale de 36 Km et verticale de 25 niveaux. La version utilisée dans cette étude est celle notée « 2.3.6 ».
Nous utilisons dans ce travail, le domaine de simulation « CONT3 » recouvrant une partie de l’Europe de l’ouest (entre 30°N et 60°N, ‐5°W et 20°E). Le produit aérosol (profil de concentration massique en PM10) est fourni par le modèle de chimie‐transport CHIMERE, et les simulations météorologiques par le modèle MM5, à une résolution de 0.5°* 0.5° (soit 55* 55 Km).
2.5 La carte topologique autoorganisatrice de Kohonen
La carte de Kohonen fait partie des modèles neuronaux les plus anciens [T. Kohonen.,1984]. Fortement inspiré par la biologie, il imite l’organisation topologique du cerveau des mammifères. Il s’agit d’un modèle statistique dont les propriétés théoriques sont liées aux méthodes statistiques de reconnaissance des formes comme la classification automatique, l’analyse en composantes principales non‐linéaire et l’approximation de fonction densité [H.Ritter., 1992] et [T.Kohonen., 1994]. Le principe sous‐jacent de ce modèle consiste à projeter un ensemble D de données X de dimension m dans un espace discret de dimension réduite (2 ou 3) en faisant apparaitre les corrélations qui existent au sein de D, l’espace topologique ainsi déterminé peut servir à visionner les données et propose une topologie permettant d’apprécier les proximités existantes entre les données de dimension m.
14 http://www.ucar.edu/mm5

38
Figure 2.6 ‐Carte topologique : treilli de neurones de dimension 2 muni d’un système de voisinage et entièrement connecté à la couche d’entrée.
2.5.1 Architecture Une carte de Kohonen est un réseau de neurones constitué de deux couches totalement connectées (FIG.1). La couche d’entrée prend la valeur du vecteur X, la seconde est un treilli régulier à deux ou trois dimensions dont chacun des nœuds est un neurone linéaire. Ce treilli représente un espace discret, de faible dimension d<<m, muni d’une topologie engendrée par sa structure. En effet, la géométrie du treilli (Figure 2.7) définit le type de voisinage de chaque neurone.
Figure 2.7 ‐ Deux géométries souvent employées pour définir un treilli de neurones. Une géométrie donnée définie le nombre de plus proches voisins d’un neurone.

39
Lors de la projection de l’ensemble D sur ce treilli, en fin d’apprentissage, chaque neurone j va capter un sous –ensemble de données . On appelle cj la cardinalité du
neurone (chaque neurone possède en fin d’apprentissage une cardinalité différente). Nous verrons dans le paragraphe suivant que le vecteur poids wj d’un neurone j est un représentant du sous‐ensemble Xj. Ainsi chaque neurone représente un sous‐ensemble de données à l’aide d’un signal de même nature que les signaux traités, et le réseau approxime les relations de voisinage existant entre les différents sous‐ensembles Xj de l’ensemble D à travers la topologie du treilli : un groupe de neurones voisins sur le treilli représente des ensembles de données voisins dans l’espace Rm. La carte de Kohonen en fin d’apprentissage est un résumé ordonné des données étudiées, et on peut parler de quantification vectorielle de l’ensemble D. Le choix de la forme et de la dimension du treilli se fait à priori et dépend de l’idée dont on se fait de la complexité du processus qui a généré D.
2.5.2 Apprentissage
Ce paragraphe décrit une version simple de l’apprentissage de la carte topologique []. Le terme « auto‐organisatrice » vient du fait que cet apprentissage est non‐supervisé. Il est stochastique, chaque itération comprend deux étapes : une étape de compétition entre les neurones qui détermine la région du treilli que l’on va ajuster, et une étape d’adaptation des poids de la zone sélectionnée à la donnée courante.
Initialisation Grace au codage préalable des données, on peut initialiser les poids d’une façon aléatoire entre ‐1 et 1. Etape de compétition A l’itération t, les neurones du treilli calculent leur état en parallèle à partir d’une donnée sélectionnée aléatoirement x(t) présentée en entrée. Seule la région du treilli dont la taille varie avec les itérations la plus « active » va modifier ses poids. Cette région est définie par le neurone dont l’état est le plus grand voisinage, dont la taille sur le treilli varie avec le temps. Le voisinage modélise de façon simplifiée un couplage latéral entre les neurones sélectionnés et ses voisins et permet d’introduire les contraintes topologiques dans la représentation finale de l’ensemble D. Choisir le neurone j le plus actif revient à chercher celui dont le vecteur poids wj (de même dimension que les données d’entrée) est le plus proche de x(t) au sens de la distance euclidienne :
(2.6)
Où r désigne tour à tour chaque neurone du treilli.

40
Eatpe d’adaptation Pour déterminer le voisinage Vj(t) du neurone selectionné j, on utilise une fonction noyau K positive et symétrique, d’intégrale égale à 1, qui sert à calculer la force de l’influence du neurone j sur les autres neurones r de la carte :
(2.7)
Où T(t) est une fonction paramètre et δ(r,j) est la distance sur le treilli entre le neurone j et le neurone r. la fonction T(t) est une fonction décroissante de R+ et permet de contrôler la taille du voisinage Vj(t).Le voisinage comprendra de moins en moins de neurones au fur et à mesure que l’apprentissage progresse. La distance δ(r,j) est définie comme étant la longueur sur le treilli du plus court chemin entre les neurones r et j. La modification des vecteurs poids des neurones à l’itèration t, Δwr(t), sert à les rapprocher de l’exemple présenté x(t) suivant l’équation :
(2.8)
Où est le pas d’apprentissage est inférieur à 1.
Algorithme de base. A l’itération t :
1. Choisir x(t)=xi 2. Déterminer le neurone gagnant j(t) 3. Déterminer la tempèrature T(t) et le pas d’apprentissage 4. Modifier les poids (Eq. 3) 5. T=t+1 jusqu’à la convergence de l’algorithme.
L’avancement de l’apprentissage s’exécute en effectuant un contrôle de l’arreur RMS (Eq.A.9) en prenant comme signal erreur :
Avec
(2.9)
Où xik est la kieme composante de la iiemme donnée, et wi
jk est la k ieme composante du vecteur
poids du neurone gagnant de la iieme donnée. A la fin de l’apprentissage, chaque observation xi est assignée à son neurone gagnant, et comme déjà évoqué précédemment, chaque neurone j regroupe plusieurs observations . Puisque le neurone j est
associé à un vecteur poids wj le plus proche possible (au sens de la distance euclidienne) du sous‐ensemble de données Xj, ce vecteur poids peut être vu comme un représentant de ce

41
sous‐ensemble. La qualité de la représentation de D à travers la carte topologique peut s’estimer numériquement par le critère de contraste, qui sert à apprécier la régularité du partitionnement de l’ensemble D :
(2.10)
Où Nref est le nombre de neurones de la carte, cj est la cardinalité du neurone j, et č est la cardinalité moyenne de la carte. Le contraste vaut zéro quand tous les neurones ont la même cardinalité qui vaut alors la moyenne.
2.6 Classification et carte topologique
Parmi les différentes applications réalisées à l’aide des cartes auto‐organisatrice, un assez grand nombre concerne des problèmes de classification. L’auto‐organisation, telle que nous venons de la décrire, ne permet pas de résoudre directement ce type de problèmes : le résultat de l’apprentissage non supervisé permet d’affecter une observation à un sous‐ensemble d’une partition, indépendamment de toute notion de classe. On considère que l’on dispose d’un très grand nombre d’observations bruitées dont on ne connait pas exactement la classe. La partition proposée dépend de la densité de probabilité qui est sous‐jacente à l’ensemble des observations de l’ensemble d’apprentissage. Les régions ayant une forte densité d’observations vont être décrites par une sous partition fine, celles de faible densité par une sous partition plus grossière. La grande quantité de données disponibles dans les régions de fortes densités permet d’obtenir une information plus précise pour ces régions. D’autre part, la partition proposée est de nature géométrique et dépend du codage choisi pour représenter les observations. Ainsi, pour un même problème, différents codages peuvent être à l’origine de différentes partitions de l’espace des observations. Avec l’algorithme des cartes auto‐organisatrices, le choix du codage introduit d’une manière implicite des informations sur le problème à traiter.
L’idée principale de l’algorithme est de faire apparaitre des groupements cohérents (les sous‐ensembles de la partition) en relation avec l’application traitée. Si l’application envisagée consiste en un problème de classification en S classes, les différents sous‐ensembles doivent s’intégrer au mieux avec celles‐ci. On cherche alors à affecter chaque sous‐ensemble de la partition à l’une des S classes. Puisque chaque sous‐ensemble est associé à un neurone de la carte, le problème de classification se résume à celui de l’étiquetage de chaque neurone de la carte à l’aide de l’une des S classes du problème. L’étiquetage peut se faire de deux manières différentes :

42
1. Puisque chaque sous ensemble de la partition P est représenté par un référent et que celui‐ci est une observation moyenne, il est possible de demander à un expert du domaine d’application de reconnaitre, grâce aux caractéristiques de cette observation, la classe à laquelle elle appartient.
2. En utilisant des données expertisées. 3. En regroupant les neurones de la carte d’une manière statistique, le recours à
l’expertise ne se faisant qu’à l’issue de cette phase.
2.6.1 Etiquetage de la carte par données expertisées On suppose dans la suite que l’on cherche à effectuer une classification en S classes et que les étiquettes e ces classes sont prises dans l’ensemble des étiquettes L=li, i=1,…..,S. En fin d’apprentissage, quand tous les paramètres de la carte ont été estimés, chaque observation x peut être affectée à un neurone c de la carte et prendre comme étiquette celle de ce neurone (lc). Le problème est donc de répartir les différentes étiquettes de L sur tous les neurones de la carte. L’étiquetage des neurones de la carte représente la première phase à mettre en œuvre si l’on veut obtenir un classifieur, si le nombre de données expertisée est très grand, l’étiquetage peut se faire à l’aide d’un vote majoritaire (voir Figure 2.8) :

43
Figure.2.8 ‐ Principe de l’étiquetage de la carte à partir des données expertes : les
données expertisées sont affectées à leur neurone par la carte. Les neurones prennent une étiquette parmi S, selon le vote majoritaire obtenu en utilisant des données
expertes de chaque neurone.
• Affecter l’ensemble des données expertisées aux différents neurones de la carte en utilisant la règle d’affectation de l’algorithme d’apprentissage considéré.
• Parmi l’ensemble des données affectées au neurone c, choisir l’étiquette li apparue le plus souvent : le neurone c devient un représentant de la classe li.
• Le sous‐ensemble affecté au neurone c est considéré comme un sous‐ensemble de la clase li ; toutes les observations de ce sous‐ensemble prennent alors l’étiquette li.
A la fin de la phase d’étiquetage, l’ensemble de neurones Ci qui ont la même étiquette li correspondent aux différentes fonctions densités qui approchent la répartition des données de la classe li. Le grand nombre de données expertes garantit dans ce cas la qualité du classifieur. Bien entendu, les neurones qui représentent des observations situées aux frontières de différentes classes peuvent être mal étiquetés. Il se peut également que les neurones n’aient capté aucune donnée experte: les zones de l’espace des observations relatives à ces neurones sont alors mal connues.

44
2.6.2 Recherche d’une partition adaptée aux classes recherchées Si le nombre d’observations étiquetées par l’expert est trop petit, la méthode d’étiquetage ci‐dessus est mal adaptée. Le vote majoritaire peut introduire un nombre important d’erreurs ; la présence d’une seule observation étiquetée, si celle‐ci est erronée, entraine l’étiquetage du neurone. Si cette observation a été mal identifiée par l’expert, ou si elle n’est pas représentative du neurone auquel elle a été affectée, une région toute entière de l’espace des observations est elle‐même mal étiquetée. Cette région, qui peut être grande, va entrainer par la suite des erreurs de classification. D’autre part, étant donné le nombre réduit des données étiquetées, un nombre important de sous‐ensembles de la partition peut se trouver sans aucune observation expertisée : les neurones correspondants ne se voient attribuer aucune étiquette. Il est possible, dans ce cas, d’envisager une autre approche en regroupant « au mieux » les différents sous‐ensembles d’observations. On cherche alors à obtenir une partition plus grossière, l’étiquetage n’intervenant qu’après cette première phase de regroupement des neurones. Le fait de regrouper plusieurs neurones permet de fusionner plusieurs sous‐ensembles de la partition, et permet d’utiliser un nombre plus grand de données expertes pour l’étiquetage du regroupement. Bien entendu, la même restriction subsiste sur la qualité de la représentation : les ambigüités ne disparaissent que si les groupements sont cohérents avec la classification recherchée, et si le vote majoritaire permet de choisir la bonne classe. Si l’on considère que la carte et la partition obtenues à la fin de l’auto‐organisation sont de bonne qualité, la prise en considération des propriétés des algorithmes de la carte auto‐organisatrice permet de faire les deux hypothèses suivantes :
• La quantification des données est de bonne qualité : chaque vecteur référent représente bien l’ensemble des observations qui lui sont affectées.
• L’ordre topologique est bon, deux sous‐ensembles relatifs à des neurones proches sur la carte sont constitués d’observations proches dans l’espace des observations.

45
Figure.2.9‐ Recherche d’une partition adaptée aux classes recherchées. La méthode consiste à regrouper les neurones de la carte par classification ascendante hiérarchique (CAH) et à tester les différentes partitions obtenues en fonction des données expertisées.
La seconde hypothèse suppose de plus qu’il existe une structure dans les données qui est sous jacente au problème de classification, l’ordre topologique de la carte permet d’exhiber cette structure : deux sous‐ensembles représentés par des neurones voisins ont donc une forte probabilité de représenter des observations appartenant à la même classe. Bien entendu, les hypothèses que nous venons de considérer sont très fortes, et sous entendent de plus que l’on a identifié le bon codage des données pour effectuer la classification. Ceci suppose qu’une étude préalable a été faite dans le but d’obtenir une bonne représentation des observations et donc une sélection adéquate des variables et un codage pertinent pour le problème de classification traité. Un exemple de l’effet des différents codages sur la classification sera donné dans le paragraphe sur les applications. La classification ascendante hiérarchique [Jain et Dubes (1988)], qui est une méthode de classification automatique, permet d’effectuer la seconde phase nécessaire à l’élaboration du classifieur en regroupant « au mieux » les neurones (Figure 2.8 et Figure 2.9). Il s’agit d’une méthode qui calcule une hiérarchie de partitions, chaque partition permettant de regrouper d’une manière différente les neurones de la carte. Les différentes partitions de la hiérarchie sont déterminées d’une manière itérative, en commençant par la partition la

46
plus fine qui est composée de l’ensemble des singletons (les neurones). La classification hiérarchique utilise cette partition initiale et procède à des regroupements successifs en fusionnant à chaque itération deux sous‐ensembles de neurones. Le choix des deux sous‐ensembles qui vont fusionner à une étape donnée est effectué à l’aide d’une mesure de similitude définie entre deux sous‐ensembles. On choisit, parmi tous les couples de sous‐ensembles qui constituent la partition à cette étape, les deux sous‐ensembles de neurones les plus semblables, au sens de la mesure choisie.
Figure 2.10 ‐ Regroupement des neurones de la carte par classification ascendante hiérarchique : les feuilles de l’arborescence représentent les neurones (ici 6 neurones) ; l’axe des ordonnées donne, pour chaque regroupement ou palier agrégatif, l’indice
d’agrégation pour la similarité choisie.
(11)
(10)
(9)
(8)(7)
(1) (4) (3) (6) (2) (5)
Indice de dissimilarité

47
L’algorithme de classification hiérarchique se résume de la manière suivante :
Algorithme de classification hiérarchique
1. Initialisation. Considérer la partition formée par les singletons ; chaque neurone est alors affecté à un sousensemble distinct. Choisir le nombre K de groupement que l’on souhaite former.
2. Pour une partition donnée, trouver les deux sousensembles les plus proches au sens du critère de similitude choisi, et les fusionner de manière à former un seul sousensemble.
3. Si le nombre de groupement de la partition courante est inférieure à K, revenir à l’étape (2), sinon fin de l’algorithme.
Différentes mesures de similitude sont proposées dans la littérature [Jain et Dubes (1988)]. La mesure de similitude la plus connue est celle de Ward, qui consiste à opérer des regroupements de façon à ce que la somme des inerties des groupements obtenus reste la plus petite possible : ceci revient à favoriser des groupements les plus compacts possible dans l’espace (euclidien) des données. En retenant le critère de Ward pour effectuer des groupements de neurones de la carte, on se place dans l’espace des observations ; le regroupement se fait alors par l’intermédiaire des vecteurs poids Wc. Mais les neurones appartiennent à la carte qui a une structure topologique discrète définie par le graphe : il est alors possible de favoriser des groupements en tenant compte de cette structure discrète. On sera amené à favoriser des groupements de neurones représentant des régions connexes sur la carte. Le choix de l’une de ces représentations, ou d’une stratégie mixte en combinant les deux, a une influence fondamentale sur les regroupements obtenus. La classification hiérarchique permet d’engendrer un nombre variable de sous‐ensembles, car le processus de regroupement peut être arrêté à tout moment. Pour une mesure de similarité donnée, le nombre d’éléments de la partition que l’on choisit dépend du nombre S de classes recherchées. Ce nombre dépend aussi de la consistance entre la partition (qui est calculée de manière totalement statistique) et des S classes du problème traité que l’on cherche à déterminer. Ce nombre peut être plus grand que S si statistiquement une classe n’est pas très homogène. On considère alors que l’expert a regroupé en une même classe des cas qui, du point de vue de l’espace des observations, sont assez différents. L’analyse de la partition la plus cohérente obtenue à l’aide de la méthode de classification hiérarchique permet de voir s’il y a homogénéité ou pas des classes proposées par l’expert. Elle peut donc permettre de proposer une classification plus fine en S’ classes (S’>S).

48
3. Méthode d’estimation du niveau de pollution à partir des types de temps
Introduction
La première analyse statistique de ce chapitre consiste à étudier l’existence d’une relation entre AOT et PM10 ainsi que sa dépendance aux conditions météorologiques, et cela en utilisant l’Analyse en Composante Principale (ACP). Cette méthode statistique linéaire permet une analyse des corrélations entre les variables. Cette étude met en évidence le rôle complexe des variables météorologiques dans la relation PM10‐AOT.
La deuxième étude statistique consiste à trouver des situations météorologiques typiques (types de temps) pour lesquelles la relation (PM10, AOT) est simplifiée, car dépendant au deuxième ordre des paramètres météorologiques. Chacun des types de temps ainsi élaboré permet de faire apparaître des classes cohérentes de concentration massique en PM10 et d’épaisseur optique (AOT) pour lesquelles la relation recherchée apparaît plus clairement.
Afin de pouvoir valider statistiquement cette approche, il importe dans un premier temps de réunir les données les plus fiables et les plus nombreuses. Certaines observations essentielles, comme les profils verticaux de la concentration massique des aérosols mesurés par Lidar, sont disponibles en trop petit nombre. Les données des modèles météorologiques et les modèles de chimie‐transport étant maintenant accessibles avec des résolutions spatiales fines, nous avons donc décidé dans un premier temps d’investiguer le bien fondé de l’hypothèse faite sur les types de temps, en utilisant quand cela était possible les données sortant des modèles qui sont beaucoup plus simples à gérer que les données réelles étant donné leur échantillonnage spatial et temporel discret. Afin d’améliorer l’échantillonnage temporel des observations, nous avons utilisé les mesures du réseau AERONET effectuées par les photomètres CIMEL pour la partie optique. De plus étant donné la forte variabilité des relations recherchées aux conditions géographiques, nous avons limité notre étude à la région Lilloise, région qui a fait l’objet d’un grand nombre d’études sur le sujet. Afin de simplifier le problème, nous avons négligé dans cette phase exploratoire, la variabilité annuelle et inter annuelle. Nous avons donc réalisé l’étude sur une seule année et une seule saison : l’été 2007.

49
Le premier paragraphe présente l’ensemble des données que nous allons utiliser. Le second paragraphe présente une première analyse justifiant la classification en types de temps. Le troisième paragraphe présente la méthodologie employée pour définir les types de temps et les résultats obtenus pour l’été 2007 à Lille. Il discute de la validité géophysique de la classification trouvée. Le quatrième paragraphe montre les relations obtenues après application de la classification et valide la méthode de manière qualitative et quantitative.
3.1 Les données de l’étude
3.1.1 Les observations Nous utiliserons au cours de cette étude, les mesures d’épaisseur optique en aérosols obtenues par télédétection depuis le sol à l’aide de photomètres solaires, ainsi que les mesures in situ (effectuées à 2m du sol) de concentration massique en aérosols (PM10). Cette étude se concentre sur la région Lilloise (zone A1) et nous avons donc pris en considération toutes les stations de mesures de PM10 et d’AOT se trouvant dans cette région pour les mois de l’été 2007 (01/06/2007 au 31/08/2007). Cette zone possède cinq stations de mesures de concentration massique PM10 et un seul photomètre CIMEL mesurant l’AOT (se trouvant sur le toit du LOA), toutes ces stations sont dans un rayon de 10km (voir Figure 3.1).
Station de mesure de PM10
Potomètre (CIMEL)

50
Figure 3.1 ‐ Localisation de la zone A1 et emplacement des stations de mesures.
• Les stations de PM10
Dans le cadre de la surveillance de la pollution par les aérosols, les agences de qualité de l’air (voir partie 2.3.1) mesurent tous les jours, 24 h sur 24h, en France la concentration massique en PM10 (« Particulate‐Matter » dont le diamètre est inférieur a 10 µm, (PM10)obs). Pour notre L’étude nous avons considéré la moyenne des concentrations horaires produites par les 5 stations se trouvant dans l’agglomération Lilloise (Figure 3.1), ce qui nous fait 2208(92 jours*24h) mesures sur notre période d’étude. Cette moyenne sera considérée par la suite comme représentative de la concentration de PM10 sur la zone Lilloise.
• Le réseau AERONET
Le réseau mondial de photomètres AERONET (Aerosol Robotic Network) fournit des mesures en visée directe du soleil en ciel clair permettant de restituer l’épaisseur optique en aérosols à différentes longueurs d’onde. Ces photomètres effectuent des mesures de distribution angulaire de luminance du ciel, permettant d’accéder à différents paramètres tel que la distribution en taille des aérosols, leur albédo de diffusion simple et leur indice de réfraction (voir partie 2.3.2).
Nous utiliserons, les mesures horaires (prises entre 05h et 18h d’une manière automatique par le photomètre) disponibles, de niveau 1.5, à trois longueurs d’onde différentes (430nm, 760nm, 870nm) provenant du seul photomètre Lillois. Etant donné la couverture nuageuse, nous avons collecté sur notre période d’étude (01 juin 2007 au 31 août 2007) 227 mesures horaires d’AOT aux trois longueurs d’onde. La moyenne sur les valeurs horaires des trois longueurs d’onde sera considérée par la suite comme représentant la mesure optique sur la zone Lilloise.
3.1.2 Les données modèles
Pour les données modèles, nous avons utilisé les simulations réalisées dans le cadre du Projet européen GEMS (http:/euler.Lmd.polytechnique.fr/GEMSchimer/) sur un domaine recouvrant une partie de l’Europe de l’Ouest (entre les latitudes 35°N et 70°N et les longitudes ‐10°W et 35°E) (voir partie 2.4). Dans le cadre de notre étude, nous avons utilisé les profils verticaux en concentration massique PM10 simulés par le modèle de chimie‐transport CHIMERE ainsi que les profils verticaux des variables météorologiques (vent zonal, vent méridional, température, humidité) fournies par le modèle météorologique MM5.
Ces deux modèles fournissent des données toutes les heures à une résolution de 0.5° x 0.5° soit environ 55Km x 55Km. La résolution verticale est de huit couches d’épaisseur variable :

51
la première couche est d’environ 50m et l’épaisseur des suivantes augmente avec l’altitude. La dernière couche est de 2 km d’épaisseur et s’étend jusqu’à une altitude d’environ 5.5 km.
Pour cette étude, nous avons cherché à mettre en relation des valeurs de PM10 et d’AOT comparables, donc des quantités intégrées. Nous avons approximé la concentration massique intégrée, en effectuant une intégration par la méthode des trapèzes des profils de PM10 simulés par le modèle de chimie‐transport Chimère. Cette méthode permet d’estimer une concentration massique intégrée des (PM10)Int de la couche limite et d’une partie de l’atmosphère libre (jusqu'à une altitude de 5.5Km).
De cette manière, la région Lilloise est caractérisée chaque heure par un vecteur de dimension 8x 4 + 1 (8 niveaux pour le vent zonal, le vent méridional, la température et l’humidité, plus la valeur intégrée (PM10)Int ). Pour la période allant du 01 juin au 31 août 2007, la matrice des données est composée de 2208 vecteurs de dimension 33 en coïncidence avec les 2208 observations de PM10 prises à 2m du sol ((PM10)obs ,paragraphe 3.1.1).
Dans la suite de cette étude, nous appelons DATA‐1 l’ensemble des 2208 situations horaires provenant des modèles (variables météorologiques et PM10). La deuxième base de données appelée DATA‐2 correspond aux 227 situations de DATA‐1 possédant une mesure d’épaisseur optique et une mesure (PM10)obs. DATA‐2 va permettre de mettre en relation les variables météorologiques, la concentration massique (PM10)Int et la valeur d’AOT.
3.2 Rôle des variables environnementales dans la relation PM10AOT
Afin d’illustrer la complexité de la relation qui lie les PM10 aux AOT, nous avons représenté sur la Figure 3.2, les diagrammes de dispersion entre les AOT et les (PM10)obs observées (Figure 3.2a) ou les (PM10)Int intégrées (Figure 3.2b). Nous avons effectué la régression linéaire de l’AOT en fonction de PM10 (Obs et Int) en utilisant l’ensemble DATA‐2.

52
Figure 3.2a ‐ Diagramme de dispersion entre la concentration massique observée (PM10)Obs
(μg/m3) et l’épaisseur optique (AOT).
Figure 3.2b ‐ Diagramme de dispersion entre la concentration massique modèle (PM10)Int (μg/m3) et l’épaisseur optique (AOT).
On observe qu’il n’existe pas de relation significative directe entre les deux grandeurs, le coefficient de corrélation linéaire est de (R=0.156) pour les PM10Obs, et de (R=0.16) pour les (PM10)Int.
L’objet de cette première étude est de répondre à la question initiale : « existe‐t‐il une relation de premier ordre entre PM10 et AOT et quel rôle jouent les variables environnementales dans cette relation ».
Pour cela, nous avons opté pour une méthode statistique linéaire d’analyse factorielle appelée, Analyse en Composante Principale (ACP). C’est une technique descriptive permettant d’étudier les relations qui existent entre les variables quantitatives, sans tenir compte à priori d’une quelconque structure.
Cette méthode remonte à Cauchy, mais elle a été formulée pour la première fois en statistique par Person, en 1901 [Person (1901)], qui décrivait cette analyse par la recherche des lignes et des plans correspondant au meilleur ajustement à un système de points de
Observations (PM10)Obs Modèle (PM10)Int

53
l’espace, autrement dit, une image de dimension réduite du nuage de points [Jackson(1991)]. L’ACP est devenue un outil largement répandu pour, la description multidimensionnelle‐analyse exploratoire multivariée [Lebart et al. (1995)], la compression surtout dans le traitement de signal, pour la classification de données et la reconnaissance des formes.
Cette méthode appliquée à une matrice X(n,m), permet une analyse des corrélations entre les m variables, elle extrait à partir de la matrice X(n,m) où n objets sont décrits par m variables, les facteurs principaux c’est à dire un système d’axes portant le maximum de l’inertie du nuage projeté des points initiaux.
Théoriquement l’ACP s’attache à la résolution de l’équation suivante :
Z=U*Φ’+E (3.1)
Où :
‐ Z (n,m) est la matrice X centrée réduite(standardisée ).
‐ Φ (m,p) est la matrice de saturation. Chaque coefficient Φjk de la matrice de saturation Φ est ici la corrélation de l’élément j au facteur principal k. le nombre de colonnes de Φ correspond au nombre de facteurs.
‐ U(n,p) est la matrice des scores dans laquelle chaque coefficient uik est ici proportionnel à la contribution du facteur principal k à l’objet i.
‐ E(n,m) est la matrice des erreurs d’approximation de Z par le produit U*Φ’.
En d’autres termes, il s’agit d’approximer Z par le produit matriciel UΦ qui minimise ||E|| définie par :
(3.2)
Les matrices U et Φ sont obtenues en effectuant une décomposition en valeurs singulières de Z qui nous donne une solution UΦ, optimale mais non unique.
Ici X(n,m) est une matrice dont les objets sont les 227 situations de DATA‐2 et les m variables correspondent aux quatre variables (température, humidité, AOT et PM10) , ce qui nous fait une matrice X(227,4) de 227 objets et de quatre variables, une forte corrélation entre un facteur principal et au moins deux variables, signale l’existence d’une relation entre ces deux là. La force de cette relation dépend de l’inertie expliquée par ce facteur principal.

54
Nous avons réalisé deux Analyses en Composantes Principales normalisées. Les deux analyses ont été réalisées à partir de DATA‐2 en faisant intervenir les variables météorologiques de surface (humidité, température), les AOT et les PM10Obs pour la première analyse (PCA‐1) et les AOT et les PM10Int pour la seconde(PCA‐2).
La qualité des résultats de l’ACP dépend du choix du nombre de facteurs principaux retenus pour reconstituer les données ou encore de la dimension de sous espace de représentation.
Pour notre étude, nous utiliserons comme critère de choix du nombre de facteurs principaux, la qualité globale de la représentation, définie comme la part d’inertie expliquée par un certain nombre de facteurs principaux par rapport à l’inertie totale.
Nous avons choisi donc de garder les deux premiers facteurs principaux qui représentent une inertie de 81.33% de l’inertie pour PCA‐1 et 84.7% pour PCA‐2.
Pour PCA‐1 l’inertie du premier facteur est égale à 53.11%, et celle du second est de 28.22%. Pour PCA‐2 le premier facteur représente 52.02% et le second 32.25%.
La méthode la plus naturelle pour donner une signification à un facteur principal F est de le relier aux variables initiales (température, humidité, AOT et PM10) en calculant les coefficients de corrélation entre le facteur principal F et chaque variable et en ne s’intéressant qu’aux plus forts coefficients de corrélation en valeurs absolues.
Pour le couple de facteurs principaux, on synthétise usuellement les corrélations sur une figure appelée « Cercle de corrélations », où chaque variable est repérée par un point (abscisse par rapport au premier facteur principal et d’ordonnée par rapport au deuxième facteur principal).
Les Figures 3.3a et 3.3b, représentent la projection des variables dans le plan des facteurs principaux (Cercles de corrélation), et le Tableau 3.1, les valeurs numériques des corrélations entre les variables initiales et les deux premiers facteurs principaux. Les résultats sont similaires et font ressortir un premier facteur beaucoup mieux corrélé aux variables météorologiques.

55
Figure 3.3a ‐ Nuage des variables (AOT, Humidité, Température, (PM10)Obs ) sur le plan des facteurs
principaux 1 et 2. Pour les (PM10)obs.
Figure 3.3b ‐ Nuage des variables (AOT, Humidité, Température, (PM10)Int) sur le plan des facteurs
principaux 1 et 2. Pour les (PM10)Int.
PCA‐1 Facteur1 Facteur2
AOTAERONET 0.20 ‐ 0.71
Humidité 0.73 0.35
Température 0.83 0.35
(PM10)obs 0.74 ‐0.21
PCA‐2 Facteur1 Facteur2
AOTAERONET 0.28 ‐0.81
Humidité 0.81 0.32
Température 0.77 0.40
(PM10)Int 0.57 ‐0.60
Tableau 3.1 : Corrélations entre les variables et les facteurs principaux.
PCA‐1 PCA‐2
Facteur 1
Facteur 2
Facteur 1
Facteur 2

56
Pour PCA‐1 et PCA‐2, on note de fortes corrélations entre les variables météorologiques (Humidité, Température), la concentration massique d’aérosols PM10 et le premier facteur principal, ce qui n’est pas étonnant l’été. Pour ce premier facteur, et pour les deux analyses, l’AOT est faiblement représenté. Le rôle de l’épaisseur optique apparaît quand on regarde le second facteur où elle est bien représentée dans les deux analyses. Alors que l’AOT semble peu reliée aux PM10 pour PCA‐1, le lien est plus évident pour PCA‐2 (sur le facteur principal 2) . Cette différence peut s’expliquer par l’utilisation de la quantité intégrée (PM10) Int à la place de l’observation (PM10) Obs mesurée à deux mètres du sol. Au regard de ces résultats, utiliser (PM10)In devrait permettre de trouver une relation reliant AOT et PM10. Plusieurs analyses ont été effectuées en faisant intervenir les différents niveaux pour les variables météorologiques et les mêmes conclusions ont été obtenues. Le premier facteur qui représente une plus grande énergie montre le rôle prépondérant des variables météorologiques pour expliquer la pollution ; au second ordre il apparaît des liens entre AOT et PM10. Ceci est en accord avec les résultats trouvés dans la littérature [B.Pelletier et al.] qui montrent une amélioration de la prévision des concentrations en PM10 à partir des AOT si on rajoute les variables météorologiques. Les deux analyses PCA‐1 et PCA‐2 confirment ces résultats, mais la différence d’énergie entre les deux facteurs pour les deux analyses montre que l’amélioration est en grande partie due à l’utilisation de la météorologie. Une plus grande précision devrait pouvoir être obtenue dans la relation (AOT, PM10), si au lieu de faire intervenir l’ensemble des variables (météorologiques, AOT) dans la fonction de régression recherchée, on corrigeait dans un premier temps l’effet dû à ces variables. Le paragraphe 3.3 introduit la notion de type de temps et montre la dépendance de la relation PM‐AOT à ces types.
3.3 Détermination des types de temps
Pour établir les types de temps, nous avons utilisé un algorithme de classification automatique appelé Cartes Topologiques. Nous avons donné dans le chapitre 2 (partie 2.5) une description détaillée de cette méthode. Sa particularité la plus importante est qu’il rend possible la comparaison de groupements réalisés directement à partir des données. Une observation est affectée à un groupement qui est projeté sur un nœud de la Carte. La comparaison des projections liées à deux observations distinctes permet d’apprécier la proximité des groupements dont elles sont issues. Des observations semblables ont la même

57
projection ; si des projections sont différentes, la dissemblance grandit avec la distance qui existe entre ces projections (la distance étant calculée sur la Carte). Les différents groupements sont identifiés sur la Carte, et il est possible de considérer simultanément l’espace des groupements et celui des observations. D’autre part, chaque groupement ainsi constitué est représenté par un vecteur référent de même dimension ayant les mêmes caractéristiques que les vecteurs que l’on a classés.
Comme nous l’avons mentionné au paragraphe précédent, la pollution sur la zone Lilloise dépend des conditions météorologiques locales, mais aussi de celles qui interviennent à des échelles spatiales plus grandes. Pour cette étude nous avons considéré en première approximation, que l’information utile pouvait être obtenue en prenant en compte une zone (A2) de 400x400 km2 autour de Lille ; nous considérons donc ici des informations de moyenne échelle. Nous avons utilisé les données météorologiques du modèle MM5 sur cette zone en considérant douze points de grilles réparties selon les cellules en vert sur la Figure 3.4. Sur cette figure la maille qui recouvre la région Lilloise (les cinq stations au sol (PM10) Obs et le photomètre CIMEL) est représentée en bleu.
Pour obtenir la classification en type de temps concernant la région Lilloise durant l’été 2007, nous avons constitué une base de données météorologique (DATA‐3) de 2208 lignes correspondant aux 2208 situations de DATA‐1. Chaque ligne est alors composée du profil du vent zonal, vent méridional, et de la température sur chacune des 12 mailles sélectionnées pour représenter la zone A2. Une donnée de DATA‐3 est donc un vecteur de dimension 288 (12x (8x3) représentant les 12 mailles et en chaque maille les données MM5 sur les 8 niveaux des trois variables météorologiques.
Etant donné le faible nombre de mesure AOT à notre disposition pour valider par la suite l’approche en type de temps, nous avons choisi une carte de Kohonen carrée de petite dimension (3x3 neurones). Cette carte permet de faire une partition de DATA‐3 en 9 groupements de situations météorologiques similaires. La Figure 3.5a, montre le nombre de données captées par chaque neurone en fin d’apprentissage. Chaque neurone représente ici une situation météorologique moyenne des situations qu’il a captées.

58
Figure 3.4 ‐ Représentation de la zone A2 et des mailles pour lesquelles on considère les données de vent méridional, zonal, température produites par MM5. La maille bleu
représente l’agglomération Lilloise (zone A1) (voir figure 1).
Figure 3.5a ‐ Nombre de situations captées par les neurones pour les 2208 situations de
DATA‐3
Figure 3.5b ‐ Nombre de situations captées par les neurones pour les 227 situations
ayant une valeur d’AOT

59
Les 227 situations météorologiques sur Lille de DATA‐2, pour lesquelles on connaît la valeur d’AOT, ont été projetées sur la Carte et réparties entre les 9 neurones. La Figure 3.5b donne le nombre de situations captées pour chaque neurone.
Pour chacun des neurones, nous avons effectué la moyenne des valeurs d’AOT et de (PM10)Int et nous avons affecté au neurone cette moyenne. La Figure 3.6a (resp 3.6b) représente la Carte moyenne d’AOT (resp (PM10)Int) de chaque neurone(ces moyennes sont représentées par une échelle de couleur sur la Figure.3.6). Les deux figures font apparaître des corrélations entre les deux projections AOT et (PM10) Int. On remarque que les neurones 1, 2, 3 qui ont une faible épaisseur optique, ont aussi une faible concentration en (PM10) Int. Les neurones 4, 5, 6 ont une épaisseur optique et une concentration massique en (PM10) Int moyenne. Les neurones 7 et 8 ont une forte épaisseur optique et une forte concentration en (PM10)In . Il reste une exception pour le neurone 9, ou la Figure 3.6a indique une situation de pollution moyenne (0.11<AOT<0.14) alors que la Figure3.6b indique une très forte pollution ((PM10)Int. > 35000 μg/m
3).
Figure 3.6a ‐ Carte de Kohonen représentant les moyennes d’AOT affectées à chaque
neurone.
Figure 3.6b ‐ Carte de Kohonen représentant les moyennes (PM10)Int
(μg/m3) affectées à chaque neurone.
Si l’on regarde simultanément les Figures 3.6a et 3.6b, il est possible de regrouper les neurones qui ont des valeurs d’AOT et de (PM10) Int similaires.

60
La Figure 3.7a (respectivement 3.7b) présente pour chaque neurone la moyenne des valeurs d’AOT (respectivement (PM10)Int) qui lui a été affectée.
Nous avons identifié à partir de cette figure quatre classes distinctes, dont les valeurs moyennes sont données dans le Tableau 3.2, nous indiquons également la valeur moyenne de (PM10)Obs calculées dans chaque classe. La classe 1 « neurones 1, 2, 3 » (respectivement 2 « neurones 4, 5,6 » et 3 « neurones 7,8 ») est caractérisée par des faibles (respectivement moyennes et fortes) valeurs d’AOT et de (PM10)Int, la classe 4, composée du neurone 9, regroupe des situations où les AOT ont des valeur moyenne (comme dans la classe 2) , mais avec des concentrations massiques (PM10)Int très fortes.
Figure 3.7a ‐ Valeur AOT des neurones.

61
Figure 3.7b ‐ Valeur (PM10)Int (en (µg/m3)des neurones.
Figure 3.7 ‐ Valeurs en AOT et (PM10)Int des neurones (la valeur d’un neurone est la moyenne des valeurs des situations captées par le neurone).
Classe 1 Classe 2 Classe 3 Classe 4
Nb de situations 62 80 46 39
AOT
moyenne 0.09 0.10 0.20 0.12
Ecart type 0.04 0.03 0.10 0.04
(PM10)Obs (µg/m3)
moyenne 14.1 17.7 21.9 20.8
Ecart type 6.5 7.8 8.8 6.08
(PM10)Int (104x µg/m3)
moyenne 1.8 2.9 3.4 4.9
Ecart type 0.6 1.03 1.2 2.1
Tableau 3.2 ‐ Moyenne et écart type des Valeurs d’AOT, de (PM10)Obs et de (PM10)In ; pour les quatre classes (calculées sur la population de chaque classe).
Les classes que nous venons d’identifier semblent homogènes, si l’on s’en tient aux valeurs moyennes d’AOT et de (PM10)In obtenues à l’aide de DTA‐2. Le problème est alors de comprendre si :

62
• les classes identifiées correspondent à des situations météorologiques
cohérentes et constituent ce que nous appellerons dans la suite les « types de
temps ».
• la méthode proposée a un caractère prédictif.
3.4 Validation de la relation (PM, AOT)
3.4.1 Interprétation en « type de temps » Afin de pouvoir interpréter les types de temps constitués par les quatre classes que nous venons de former, nous avons analysé la classification à partir des 2208 situations de DATA‐1. Chacune des données correspond à une situation météorologique à grande échelle et est donc associée à une carte MM5 (vent, température). Nous associons à chaque classe la situation météorologique (ou un type de temps) obtenue en moyennant l’ensemble des cartes MM5 associées aux situations captées par la classe. Les Figures 3.8 (a‐b‐c‐d) et 3.9 (a‐b‐c‐d), montrent les cartes moyennes de vent et de température obtenues sur la France pour les quatre classes.

63
(a)‐ « Type 1 »
(b) ‐ « Type 2 »
(c) ‐ « Type 3 »
(d) ‐ « Type 4 »
Figure 3.8 ‐ cartes moyennes de vent obtenues sur la France pour les quatre classes.

64
(a) ‐ « Type 1 »
(b) ‐ « Type 2 »
(c) ‐ « Type 3 »
(d) ‐ « Type 4 »
Figure 3.9 ‐ cartes moyennes de température obtenues sur la France pour les quatre classes.

65
L’analyse des deux Figures 3.7 et 3.8, permet de bien cerner les différences entre les quatre classes « météorologiques » qui ont été déterminées comme des « sorties » de l’analyse statistique, voir les Figures 3.8 et 3.9, ainsi que la classification représentée dans le Tableau 3.3.
Type de temps Vitesse duvent
Direction duvent
Température
1 “Cold‐Moderate‐SW” 4 225 11.9 Situation générale anticyclonique
2 “Cold‐Low‐SW” 2.5 220 14.9 Situation générale anticyclonique
3 “Medium‐Low‐NNE” 2.5 5 16.9 Situation à tendance dépressionnaire
4 “Warm‐Weak‐S” 1.6 175 19.9 Situation générale anticyclonique
Tableau 3.3 – Caractéristiques météorologiques des types de temps.
Les types de temps 1 et 2 correspondent à des vents de sud‐ouest d’intensités 1.5 m/s de différence et de températures différentes (3 degrés de différence), dans la suite nous appellerons les types de temps 1 et 2 respectivement « Cold‐Moderate‐SW » et « Cold‐Low‐SW ». Le type de temps 3 est associé à un vent de secteur Nord à Nord Est modéré. La température y est nettement supérieure aux types de temps 1 et 2 de deux à trois degrés, qu’on nommera « Medium‐Low‐NNE ». Le type de temps 4 est caractéristique d’un vent faible de secteur plutôt Sud et une température nettement plus élevée à l’ensemble des autres classes et portera le nom « Warm‐Weak‐S ».
La Figue 3.10, résume notre algorithme de classification des situations météorologiques en type de temps.

66
Figure 3.10 – Schéma fondamental de la méthode ; le haut de la figure représente la classification des situations météorologiques en groupes ; le bas montre l’association entre
les groupes et les types de temps.
3.4.2 Intérêt de l’utilisation des types de temps
‐ Relation AOT‐(PM10)Int
Afin de montrer l’impact de la notion de « type de temps », sur la relation (PM10)Int ‐ AOT, nous avons étudié l’amélioration qui en résultait lorsque l’on fait des régressions pour chaque classe (définie à partir du type de temps). Les Figures 3.11a‐b‐c‐d et le Tableau 3.2 montrent ces relations pour le type 1 (resp 2 ; 3, 4). Si l’on compare les Figures 3.11a‐b‐c‐d à la Figure 3.2b du paragraphe 3.2 pour lesquelles DATA‐2 avait été utilisée sans faire intervenir la notion de type de temps, on observe une amélioration de la régression. Les coefficients de corrélation linéaire sont de (R=0,33) pour le type 1, (R=0,55) pour le type 2, (R=0,71) pour le type 3 et (R=0.66) pour le type 4. Alors que pour les trois premiers types, les nuages des points sont homogènes, on observe pour le type 4 une configuration plus délicate. La Figure 3.11d montre deux nuages de points assez séparés. Si l’on représente (Figure 3.12) les profils MM5 de (PM10)Int associés à ce type de temps, on observe que les

67
profils du nuage de point situé en bas et à gauche de la Figure 3.11d est caractérisé par des fortes valeurs dans les basses couches (Figure 3.12a), alors que le nuage situé en haut et à droite de la Figure 3.11d a de fortes valeurs dans les plus hautes couches de l’atmosphère (Figure 3.12b).
Figure 3.11a ‐ Régression linéaire de AOT par rapport à
(PM10)Int (μg/m3) pour les données de type 1 (R=0.33).
Figure 3.11e ‐ Régression linéaire de AOT par rapport à
(PM10)Obs (μg/m3) pour les données de type 1 (R=0.30).
Figure 3.11b ‐ Régression linéaire de AOT par rapport à
(PM10)Int (μg/m3) pour les données de type 2 (R=0.55).
Figure 3.11f ‐ Régression linéaire de AOT par rapport à
(PM10)Obs (μg/m3) pour les données de type 2 ( R=0.31).

68
Figure 3.11c ‐ Régression linéaire de AOT par rapport à
(PM10)Int (μg/m3) pour les données de type 3 (R=0.71).
Figure 3.11g ‐ Régression linéaire de AOT par rapport à
(PM10)Obs (μg/m3) pour les données de type 3 (R=0.021).
Figure 3.11d ‐Régression linéaire de AOt par rapport à
(PM10)Int (μg/m3) pour les données de type 4 (R=0.66).
Figure 3.11h ‐ Régression linéaire de AOt par rapport à
(PM10)Obs (μg/m3) pour les données de type 4 (R=0.10).
Figure 3.11 ‐ Diagramme de dispersion entre (PM10)Int (respectivement (PM10)Obs) et AOT, et régression linéaire d’AOT par fonction de(PM10). (a‐e) pour le type 1, (b‐f) pour le type 2,
(c‐g) pour le type 3, (d‐h) pour le type 4.

69
(a)
(b)
Figure 3.12 ‐ Profils de (PM10) modèle chimère constituant le type 4 “Warm‐Weak‐S”.

70
Pour comprendre ces différences, il faut revenir à la manière dont les données qui ont servi à la classification ont été élaborées. Pour chaque profil modèle CHIMERE de [(PM10)], nous avons huit niveaux, la distance entre les niveaux augmente avec l’altitude, elle atteint 2Km entre les deux derniers niveaux. Etant donné la manière dont nous avons effectué l’intégration des profils de PM10, fait que les valeurs de (PM10) intégrées sur le profil, peuvent être très fortes, si une ou plusieurs valeurs de niveaux sont fortes, contrairement à la valeur de l’épaisseur optique. Le photomètre calcule de manière plus précise la valeur intégrée en épaisseur optique (intègre sur des petits morceaux), alors que les données que nous avons utilisées sont intégrées à partir de 8 points. Etant donnée la méthode utilisée pour l’intégration des PM10, la présence de nuage d’aérosols dans les hautes couches, pèse très fortement dans le calcul du (PM10)Int. Il est donc probable que la relation recherchée est biaisée pour ces situations.
‐ Relation AOT‐(PM10)Obs
D’un autre côté, si l’on compare les régressions obtenues pour les (PM10)Obs à ce qui était obtenu précédemment avec (figure 3.2a), la notion de « types de temps » ne permet pas de toujours améliorer la régression ((PM10)Obs‐AOT) (Figures 3.11e‐f‐g‐h). Pour les situations météorologiques à faible pollution (type 1 et type 2), la relation est améliorée (R=0.30 pour le type 1 et R=0.31 pour le type 2) et comparable à celle que l’on trouve pour la relation (PM10)Int‐AOT. Il n’y a aucune relation pour les deux autre types de temps (3 et 4) : (R=0.021 pour le type 3 et R=0.10 pour le type 4). Pour les fortes pollutions, on retrouve ici le fait que la mesure au sol des PM10 n’est pas représentative de la quantité d’aérosol dans l’atmosphère. Au contraire la mesure PM10 au sol est représentative des situations de faible pollution où 90% des aérosols se trouvent dans la couche limite. Les Figures 3.11a‐b et 3.11‐e‐f sont en correspondance et l’on peut en conclure que les (PM10)Obs et (PM10)Int délivrent la même information quand la pollution est faible. Pour les fortes pollutions, l’utilisation du profil de (PM10) est indispensable pour obtenir une relation acceptable. Dans tous les cas, l’utilisation des types de temps permet de séparer les différents cas.
Afin de vérifier la consistance temporelle de cette classification, nous avons représenté sur la Figure 3.13, la série temporelle des types de temps prévue pour les 2208 situations de DATA‐1. Cette figure montre qu’il existe des événements météorologiques liés aux types de temps qui persistent pendant plusieurs jours. Si on s’intéresse aux transitions d’un type de temps à un autre, nous remarquons par exemple que (80%) des transitions du type de temps 1 qui traduit une très faible pollution vont vers le type de temps 2 “Cold‐Low‐SW” c’est‐à‐dire une pollution moyenne.

71
Figure 3.13 ‐ Time series of the four weather types for the 2208 situations (summer 2007).
Nous avons calculé les probabilités de transition d’un type de temps à un autre. La Figure 3.14, présente le diagramme de transition. Les valeurs sur les flèches sont les probabilités de transition d’un type de temps à un autre (c’est‐à‐dire d’un indice de pollution à un autre). Le type de temps le plus fréquent est le « Cold‐Low‐SW » et la transition la plus fréquente est vers le type « Cold‐Moderate‐SW ».
Le type « Cold‐Low‐SW » indique que la plupart du temps, la pollution peut être assez bien prévue. La seule possibilité pour « Medium‐Low‐NNE » est de se déplacer vers « Cold‐Low‐SW ».

72
Figure 3.14 – Graphique des transitions entre les quatre différents types de temps.
3.5 Qualité prédictive de la méthode
Les relations linéaires reliant PM10 à AOT calculées au paragraphe précèdent l’ont été pour apprécier qualitativement l’intérêt de l’approche type de temps. Dans ce paragraphe nous cherchons à déterminer dans les mêmes conditions la validité de l’approche en prédiction.
L’étude de la relation (AOT, PM10) qui est fortement non linéaire et son pouvoir de prédiction seront étudiés au chapitre 4.

73
La validité en prédiction à été effectuée en utilisant les données de l’été 2006. La carte des types de temps a été calibrée avec les données de l’été 2007 et le test à été effectué en projetant celle de l’été 2006.
Pour valider la qualité prédictive des régressions linéaires obtenues, nous avons utilisé un ensemble de critères pour comparer les performances de la méthode:
Avec :
AOTthéorique : la valeur mesurée.
AOTcarte : la valeur projetée par la carte.
S: le nombre de mesures.
Erreur relative : L’erreur relative, comme son nom l’indique donne la marge d’erreur par rapport à la valeur en question.
(3.3)
La moyenne des résidus
(3.4)
L’écart type des résidus
(3.5)
L’été 2007 était très nuageux et comportait moins de mesures d’AOT que l’été 2006 pour lequel on observe plus de situations météorologiques différentes. Nous avons donc regardé le pouvoir prédictif des régressions en ne considérant que les situations météorologiques (des profils de vent zonale, méridionale et température) de l’été 2006 comprises entre plus ou moins deux écarts types de celles de l’été 2007, le nombre limite de types de temps détecté à l’été 2007 dû au faible nombre de mesures d’AOT disponibles ne permet pas de statuer sur l’ensemble de cas, beaucoup plus nombreux de l’été 2006. La Table 3.4, donne les valeurs obtenues pour ces comparaisons. D’une manière générale les deux années donnent des performances du même ordre, prouvant la généralisation.

74
E M T
1 “Cold‐Moderate‐SW”
Ensemble d’apprentissage : été 2007 52.2% 0.17 0.49
Ensemble de test : Eté 2006 44.2% 0.14 0.42
2 “Cold‐Low‐SW”
Ensemble d’apprentissage : été 2007 43% 0.12 0.40
Ensemble de test : Eté 2006 30.9% 0.03 0.31
3 “Medium‐Low‐NNE”
Ensemble d’apprentissage : été 2007 45% 0.14 0.42
Ensemble de test : Eté 2006 52% 0.24 0.46
4 “Warm‐Weak‐S”
Ensemble d’apprentissage : été 2007 32% 0.082 0.31
Ensemble de test : Eté 2006 57% 0.11 0.53
Tableau 3.4 ‐ Comparaison des performances d’estimations des AOT en utilisant la relation entre ((PM10)Int et AOT) établit pour chaque type de temps en utilisant les
situations de l’été 2007 avec celles utilisant les situation (PM10)Int de l’été 2006. (a) pour le type 1, (b) pour le type 2, (c) pour le type 3, (d) pour le type 4.
3.6 Discussion et conclusion
L’étude que nous avons effectuée n’a été menée que sur une seule année dans des conditions où la pollution particulaire ne pouvait pas être considérée comme très préoccupante.
Nous avons cependant pu mettre au point une méthode d’analyse associant l’exploitation de mesures d’AOT (réseau AERONET), l’observation de PM10 en surface et des informations couplées sur la situation météorologique et les PM10 intégrés issus du modèle MM5 associé au module physico‐chimique CHIMERE. Il convient de noter que les modèles MM5 et CHIMERE ont une capacité d’assimilation des données mesurées qui est potentiellement supérieure à la seule disposition de données de PM10 en réseau et seront dans l’avenir aptes à assimiler les données de PM10 existantes et de restituer d’une part un champ spatial de PM10 en surface et d’autre part de calculer des PM10 intégrés.

75
Les PM10 intégrés que nous avons utilisés sont plus représentatifs que les PM10 observés puisqu’ ils représentent les apports en PM10 dans la couche limite. Les PM10 observés correspondent à des observations de surface souvent lacunaires et pas toujours représentatives de la pollution particulaire dans la couche limite.
Nous avons pu ainsi identifier quatre classes de pollution caractérisées des valeurs d’AOT et du couple de valeurs PM10 observés et PM10 intégrés. Bien que faible le nombre de situations observées pour chacune des classes est compris entre 39 et 62 ce qui donne une valeur statistique suffisante à ces observations.
Les classes observées sont les suivantes :
‐ classe de très faible pollution : aussi bien les valeurs d’AOT que les couples de valeurs de PM10 et PM10 intégrés sont faibles
‐ une classe de faible pollution dans laquelle le niveau d’AOT est assez voisin de la classe 1 tandis que le couple de valeurs PM10 et PM10 intégrés est supérieur à la classe 1.
‐ une classe de niveau de pollution moyen à forte où le niveau d’AOT est deux fois supérieur aux classes 1 et 2 et le niveau de PM10 et PM10 intégrés sont assez forts
‐ une classe de pollution où le niveau d’AOT est modéré tandis que le niveau de PM10 est équivalent à la classe 3 avec un niveau de PM10 intégré très fort. Cette classe met en évidence le rôle de la stratification des PM10 dans la couche limite.
Ces quatre classes statistiquement significatives correspondent à deux types de situations météorologiques régionales (anticyclonique pour les classes 1,2,4) et dépressionnaire pour la classe 3.
Nous avons maintenant un outil d’observation, d’analyse et de prévision de la pollution particulaire. Il reste donc à analyser sur plusieurs années la validité de la méthode et voir si d’autres classes apparaissent.
La méthode proposée est générale, puisque l’application a montré des performances similaires quand elle était appliquée à des données (l’été 2006) qui n’ont pas participé à la calibration. Cependant le nombre de classes est encore à améliorer. En effet, si l’on part d’un ensemble d’apprentissage plus représentatif. Certaines classes comme la classe 1 et 2 restant assez proches tant du point de vue de la pollution que de la météorologie pourraient éventuellement fusionner alors que d’autres, par exemple pour des cas de très fortes pollutions particulaires comme pour l’année 2003 sont susceptibles d’être mises en évidence.

76
Nous avons maintenant un outil d’observation, d’analyse et de prévision de la pollution particulaire. Il reste donc à analyser sur plusieurs années la validité de la méthode et voir si d’autres classes apparaissent. L’épaisseur de la couche limite n’a pas non plus été prise en compte. Certes, elle est difficile à estimer précisément dans un modèle, mais devrait être analysée dans des conditions hivernales pour des couches d’inversion thermiques basses, lorsque les taux de dilution de la pollution sont faibles.

77
4. Validation de la méthodologie : télédétection satellitaire de la pollution.
Introduction La méthodologie que nous avons présentée au chapitre 3, va maintenant être appliquée sur une série temporelle plus longue. Nous avons effectué la même étude sur la zone Lilloise pour les étés allant de 2003 à 2007. Des résultats similaires à ceux du chapitre précédent ont été obtenus montrant la robustesse de l’approche grâce à une plus longue série d’observation. La limitation entrevue au moment de la validation de la méthode (partie 3.5) est maintenant levée : le nombre de types de temps que nous avons pris en compte est plus important (huit types de temps) et permet de tester d’une manière très rigoureuse les performances obtenues. En particulier, nous proposerons dans ce chapitre des indices de pollution basés sur une valeur moyenne d’AOT prédite à partir du type de temps.
Le nombre de mesures d’épaisseurs optiques observées sur cette longue période est maintenant suffisant pour proposer des fonctions non‐paramétriques permettant la prévision de la pollution à partir de ces observations. La fin du chapitre introduit l’imagerie satellitaire et montre quelle pourrait être à la portée de l’étude si l’on envisageait de faire des cartes de pollution satellitaires. Comme au chapitre 3, l’introduction de l’imagerie satellitaire dans ce chapitre ne constitue qu’un début d’étude dont les nombreux prolongements seront discutés dans le dernier chapitre de ce travail (conclusions ‐perspectives).
4.1 Les données de l’étude Les variables utilisées dans ce chapitre sont semblables à celles décrites au chapitre 3, mais présentent des différences quant aux dimensions et au nombre de données. Afin de rendre le plus clair possible la lecture du chapitre, nous avons repris l’ensemble de la description des différentes données utilisées. L’étude porte toujours sur l’été dans la région Lilloise et concerne, les mêmes variables que dans l’étude précédente, (mesures d’épaisseur optique obtenues à l’aide du photomètre solaire, mesures in situ de concentration massique en aérosols (PM10)obs et simulations modèles),. Nous rappelons qu’il existe cinq stations de mesures de concentration massique PM10 et un seul photomètre solaire (Voir Figure 3.1).

78
• Les stations de PM10
Nous utiliserons la moyenne des concentrations horaires produites par les 5 stations se trouvant dans l’agglomération Lilloise, ce qui nous fait 11040 (5 étés *92 jours*24h=11040) mesurées sur la période d’étude (étés 2003‐2007).
• Le réseau AERONET
Nous utiliserons les mesures horaires (prises entre 05h et 18h d’une manière automatique par le photomètre) disponibles, de niveau 1.5, à trois longueurs d’onde différentes (430nm, 760nm, 870nm) provenant du seul photomètre Lillois. Etant donné la couverture nuageuse, nous avons collecté sur la période d’étude (étés 2003‐2007) 836 mesures horaires d’AOT aux trois longueurs d’onde. La moyenne sur les valeurs horaires des trois longueurs d’onde sera considérée comme représentant la mesure optique sur cette zone au moment de l’analyse des types de temps. Les spectres d’AOT, constitués des trois mesures d’AOT pour les longueurs d’onde à « 430nm, 760nm, 870nm », seront utilisés à la fin de cette étude dans l’apprentissage pour la prévision des (PM10).
• Les données modèles
Les sorties des modèles proviennent des réanalyses effectuées à l’INIRIS (Institut National de l’Environnement industriel et des Risque). L’INERIS a en charge la plateforme de prévision de la qualité de l’air PREV’AIR (plateforme nationale de prévision de la qualité de l’air).Les simulations portent sur un domaine recouvrant une partie de l’Europe de l’Ouest (entre les latitudes 35°N et 70°N et les longitudes ‐10°W et 35°E) (voir partie 2.4). Nous avons utilisé les profils verticaux en concentration massique PM10 simulés par le modèle de chimie‐transport CHIMERE ainsi que les profils verticaux des variables météorologiques (vent zonal, vent méridional, température, humidité) fournis par le modèle météorologique MM5, à une résolution de 0.5° x 0.5° soit environ 55Km x 55Km.
Pour cette étude :
La résolution verticale des deux modèles (CHIMERE) est de 20 couches d’épaisseur variable « la première couche est d’environ 50m et l’épaisseur des suivantes augmente avec l’altitude. La dernière couche est d’environ 2 km d’épaisseur et s’étend jusqu’à une altitude d’environ 11 km ». Les profils verticaux des variables météorologiques MM5 vont jusqu'à une altitude de 11 Km et sont constitués aussi de 20 niveaux.

79
De cette manière, la région Lilloise est caractérisée à chaque heure par un vecteur de dimension 20x 4 + 1 (20 niveaux pour le vent zonal, le vent méridional, la température et (PM10) CHIMERE, et la valeur intégrée (PM10)Int ). Pour la période couvrant les étés 2003‐2007(allant du 01 juin au 31 août), cela représente un total de 11040 vecteurs de dimension 81. Certaines journées étant manquantes, la matrice des données est composée de 9576 vecteurs de dimension 81.
Dans la suite de cette étude, nous appellerons data‐1 l’ensemble des 9576 situations horaires provenant des modèles (variables météorologiques et PM10).
La deuxième base de données, correspond aux situations météorologiques qui possèdent une mesure d’épaisseur optique et une mesure (PM10)obs. Cette base va être utilisée, dans un but prédictif, pour mettre en relation les variables météorologiques, la concentration massique (PM10)Obs et la valeur d’AOT. Nous avons dans ce chapitre procédé à une validation très rigoureuse de nos résultats et séparé l’ensemble des données disponibles en un ensemble d’apprentissage représentant 80% des 836 situations de data‐1 sélectionnées d’une manière aléatoire et un ensemble de test comportant les 20% des situations restantes. La base d’apprentissage (data‐2‐app) contient donc 676 observations et la base de test (data‐2‐test) 160 observations. Nous rappelons qu’au cours de cette étude, data‐2‐app et data‐2‐test, ne serviront jamais pour établir les types de temps. Néanmoins, ils serviront au paragraphe 4.5 pour la prévision de la concentration massique PM10.
4.2 Détermination des types de temps Pour obtenir la classification en type de temps concernant la région Lilloise en prenant en compte les cinq étés allant de 2003 à 2007, nous allons utiliser les cartes auto‐organisatrices. Pour cela, nous avons constitué une base de données météorologique (data‐3) de 9576 lignes correspondant aux 9576 situations de data‐1. Chaque ligne est composée du profil vertical de vent zonal, vent méridionale et de température, sur chacune des 12 mailles sélectionnées pour représenter la zone A2 (Voir la Figure 3.4).
Une données de data‐3 est un vecteur de dimension (720 =12*(3*20)) représentant les 12 mailles prises en considération pour caractériser le type de temps sur la région de Lilles et en chaque maille les données MM5 (les trois variables météorologique) sur les 20 niveaux.
Etant donnée la dimension de notre base data‐3, nous avons choisi une carte carrée de grande dimension (10*10 neurones). Cette carte permet de faire une répartition de data‐3 en 100 groupements de situations météorologiques similaires. L’apprentissage est effectué dans les mêmes conditions qu’au chapitre3.
La Figure 4.1, montre le nombre de données captées par chaque neurone en fin d’apprentissage.

80
Figure 4.1 ‐ Nombre de situations captées par les neurones pour les 9576 situations de data‐3.
Etant donné le faible nombre de mesures d’AOT disponibles par rapport au nombre de données de data‐3, nous allons rassembler les neurones en groupes, en appliquant une classification hiérarchique (CAH) à notre carte auto‐organisatrice. L’utilisation de la CAH demande de choisir un critère de similarité (voir la partie 2.6.2). Selon ce critère, on agrège les deux groupes les plus proches pour former un nouveau groupe. Ce nouveau groupe peut, à nouveau être agrégé. On procède ainsi de façon itérative jusqu’à n’avoir qu’un seul groupe.
Cette méthode produit un arbre qui résume la succession de ces regroupements appelé dendrogramme. Le niveau auquel ce dendrogramme est coupé permet de déterminer le nombre de classes (ou clusters) produites.
La classification retenue est celle issue d’une classification ascendante hiérarchique en huit classes avec le critère de Ward comme critère de similarité et une contrainte de voisinage. La Figure 4.2 donne le regroupement en huit classes des 100 neurones en utilisant cette classification et la figure 4.3a le nombre de situation de data‐3 de chaque classe.
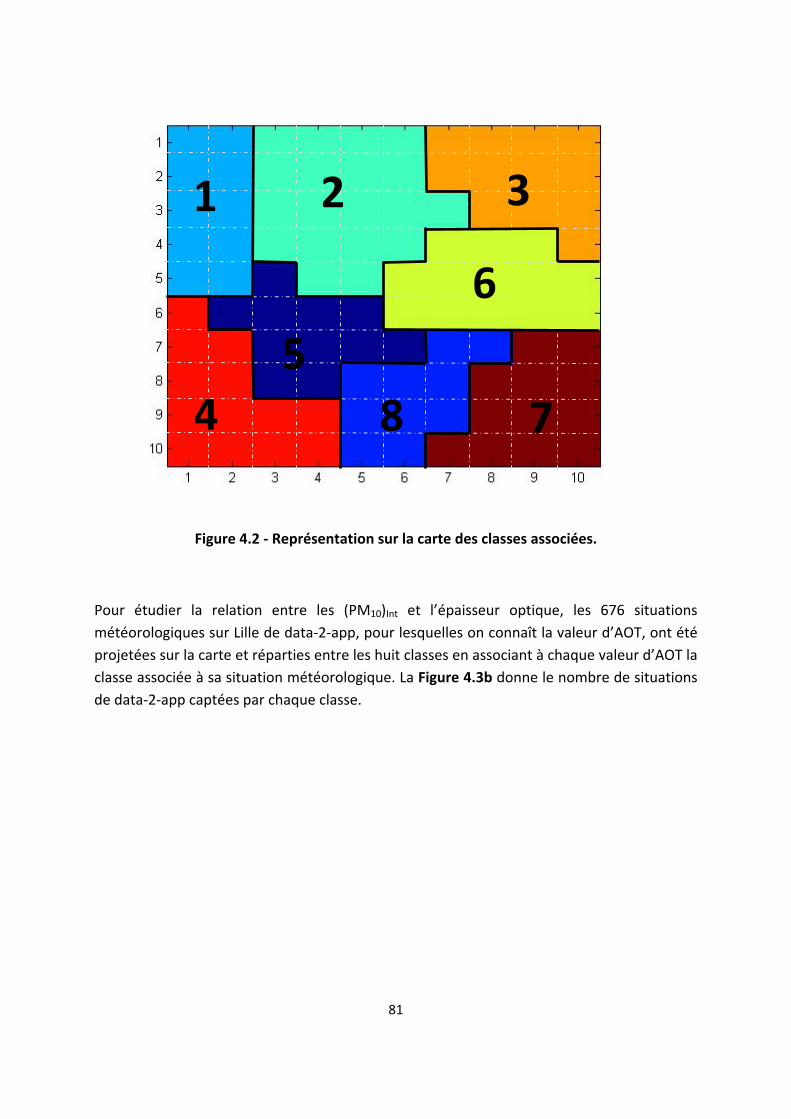
81
Figure 4.2 ‐ Représentation sur la carte des classes associées.
Pour étudier la relation entre les (PM10)Int et l’épaisseur optique, les 676 situations météorologiques sur Lille de data‐2‐app, pour lesquelles on connaît la valeur d’AOT, ont été projetées sur la carte et réparties entre les huit classes en associant à chaque valeur d’AOT la classe associée à sa situation météorologique. La Figure 4.3b donne le nombre de situations de data‐2‐app captées par chaque classe.
1
4 5
2
6
3
8 7

82
Figure 4.3a ‐ Nombre de situations captées par les 8 classes pour les 9576 situations de
data‐3
Figure 4.3b ‐ Nombre de situations captées par les 8 classes pour les 676 situations de
data‐2‐app.
Pour chaque classe, nous avons effectué la moyenne des valeurs d’AOT et de (PM10)Int et nous avons affecté à la classe cette moyenne. La Figure 4.5a (resp 4.5b) représente la carte moyenne d’AOT (resp (PM10)In) de chaque classe (ces moyennes sont représentées par une échelle de couleur). Les deux figures font apparaître des corrélations entre les deux projections d’AOT et de (PM10) Int.

83
Figure 4.5a ‐ Carte représentant les moyennes d’AOT effectuées à partir de data‐2‐app pour chacune des 8 classes.
Figure 4.5b ‐ Carte représentant les moyennes de (PM10)Int effectuées à partir de data‐2‐app pour chacune des 8 classes.

84
On remarque que :
• La classe 1 a une faible épaisseur optique, et une faible concentration massique en (PM10)Int .
• La classe 2 a une épaisseur optique et une concentration massique moyenne.
• La classe 3 à une épaisseur optique moyenne et une concentration massique en (PM10)Int plutôt faible, comparée à la classe 1
• Les classes 4 et 6 (resp 7 et 8) ont une épaisseur optique forte (resp très forte) et une concentration massique en (PM10)Int forte (resp très forte).
• L’épaisseur optique de la classe 5 est forte avec une faible concentration massique en (PM10)Int.
la moyenne d’AOT et (PM10)Int pour chaque classe (Figures 4.6a et 4.6b), représente une estimation de l’état de la pollution de la classe, et va servir dans la suite, à proposer des indices de pollution.
Nous remarquons qu’il existe une cohérence entre les deux estimations (moyennes d’AOT et (PM10)Int) pour les classes (1‐2‐4‐7‐8), et nous isolerons les classes (3‐5‐6) dont les estimations soulignent une contradiction. La figure 4.6c présente, en fonction des classes, la moyenne des valeurs de (PM10)Obs en noir et des (PM10)Surf (le premier point du profil vertical de (PM10) CHIMERE) en vert pour chaque classe. D’une manière générale on observe un bon accord entre les deux courbes. Cependant le modèle CHIMERE en surface surestime la pollution faible et sous‐estime plutôt les fortes pollutions :
• La classe 1 étant très faiblement polluée, le modèle donne des valeurs en moyenne trop fortes.
• L’accord est parfait pour les classes 2 (caractérisée par pollution moyenne)‐4(caractérisée pollution forte)‐8(caractérisée pollution très forte))
• Les classes 3‐5‐6 présentent des contradictions que nous allons analyser, on note aussi une explosion de l’estimation de (PM10)Obs pour la classe 7.
Les contradictions qui existent entre les différentes courbes de la Figure 4.6, pour les classes 3‐5‐6‐7 peuvent avoir différentes causes : la défaillance du photomètre, une estimation non adaptée du (PM10)Int obtenue en intégrant le profil vertical des concentrations massiques données par le modèle CHIMERE, ou une mauvaise modélisation proposée par CHIMERE.
Nous remarquons que pour les classes 3,5 et 6, les estimations de la pollution en AOT et (PM10)Obs sont cohérentes.

85
Une très bonne cohérence avec l’estimation par le modèle CHIMERE, de la concentration de surface (PM10)Surf pour la classe 5, ce qui peut indiquer une mauvaise estimation (intégration sur le profil) de la concentration massique en(PM10)Int.
Nous remarquons une sous estimation par le modèle, de la concentration de surface (PM10)Surf pour les classes 3 et 6. Nous supposons alors que le modèle sous estime la pollution pour ces deux classes.
L’estimation en AOT pour la classe 7, indique une forte pollution, mais pas aussi excessive que celle donnée par les stations de mesures au sol de (PM10)Obs. une explication possible serait que (PM10)Obs est une mesure prise à 2m (à hauteur humaine), alors que le photomètre est situé sur le toit d’un bâtiment, donc néglige la pollution qui est près du sol.

86
Figure 4.6‐ Valeur (a) : AOT [sans unité], (b) : (PM10) Int [µg/m3], (c) : (PM10)Obs [µg/m
3] en noir, et (PM10)Surface [µg/m
3] en vert, des huit classes.

87
Les valeurs moyennes en AOT, (PM10)Int ,(PM10)Obs et (PM10)Surf des huit classes identifiées sont données dans le Tableau 4.1.
Nous pouvons à a cette étape définir des indices de pollution :
La classe 1 (respectivement 2 ,3) est caractérisée par un indice de pollution faible (respectivement moyen).
Les classes 4, 5,6 (respectivement 7,8) sont caractérisées par un indice de pollution fort (respectivement très fort).
Classe1
Classe2 Classe3 Classe4
Classe5 Classe6
Classe7
Classe8
Nombre de situations
56 105 25 66 53 99 206 66
AOT Moyenne
0.10 0.12 0.14 0.20 0.20 0.21 0.24 0.27
Ecart type
0.048 0.067 0.051 0.094 0.097 0.14 0.16 0.12
(PM10)Obs Moyenne
16.62 19.04 19.84 24.09 23.41 24.68 34.56 28.87
Ecart type
7.62 9.35 7.35 6.41 7.66 8.71 14.96 6.87
(PM10)Surface
Moyenne
20 .33 18.32 17.20 25.51 25.54 19.65 25.84 28.59
Ecart type
9.87 10.64 9.81 14.04 12.87 8.57 9.11 7.85
(PM10)Int Moyenne
4.5 4.83 4.18 6.08 4.44 5.05 6.72 6.73
Ecart type
1.24 2.26 1.09 1.15 1.77 1.97 2.59 3.12
Tableau 4.1 ‐ Moyenne et écart type des Valeurs d’AOT, de (PM10)Obs ,(PM10)Surface et de (PM10)In ; pour les huit classes (calculés sur la population de chaque classe).

88
Les classes que nous venons d’identifier semblent homogènes, si l’on s’en tient aux valeurs moyennes d’AOT et de (PM10)In obtenues à l’aide de data‐2‐app. Nous proposons d’utiliser ces valeurs moyennes d’AOT comme indice de pollution :
Indice 1 : AOT<011, ce qui correspond à une pollution faible (classe1).
Indice 2 : O.11≤ AOT< 0.17, ce qui correspond à une pollution moyenne ou habituelle (classe 2 et 3).
Indice 3 : O.17≤ AOT< 0.23, ce qui correspond à une pollution forte (classe 4,5 et 6).
Indice 4 : O.23≤ AOT, ce qui correspond à une pollution très forte (classe 7 et 8).
Comme dans le Chapitre 3, il s’agit maintenant de comprendre si la notion de type de temps peut se généraliser. Nous allons donc analyser les situations météorologiques de chaque classe et voir si leur cohérence permet de déterminer ce que nous appelons les « types de temps ».
4.3 Validation de la relation (PM, AOT)
4.3.1 Interprétation en « type de temps » Afin de pouvoir interpréter les types de temps constitués par les huit classes obtenues, nous avons analysé la classification à partir des 9576 situations de data‐3. Chacune des données correspond à une situation météorologique à grande échelle et est donc associée à une carte MM5 (vent, température). Nous associons à chaque classe la situation météorologique (ou un type de temps) obtenue en moyennant l’ensemble des cartes MM5 associées aux situations captées par la classe. Les Figures 4.7 (a‐b‐c‐d‐e‐f‐g‐h) et 4.8 (a‐b‐c‐d‐e‐f‐g‐h), montrent les cartes moyennes de vent et de température obtenues sur la France pour les huit classes.

89
(a) ‐ « Type 1 »
(b) ‐ « Type 2 »
(c) – « Type 3 » (d) – « Type 4 »

90
(e) – « Type 5 » (f) – « Type 6 »
(g) – « Type 7 » (h) – « Type 8 »
Figure 4.7 ‐ cartes moyennes de vent obtenues sur la France pour les huit classes.

91
(a) – « Type 1 »
(b) – « Type 2 »
(c) – « Type 3 » (d) – « Type 4 »

92
(e) – « Type 5»
(f) – « Type 6 »
(g) – « Type 7 »
(h) – « Type 8 »
Figure 4.8 ‐ cartes moyennes de température obtenues sur la France pour les huit classes.

93
L’analyse des deux Figures 4.7 et 4.8 ainsi que le Tableau 4.2, permet de cerner les différences entre les huit classes.
Type de temps Vitesse vent à 10m (m/s)
Direction vent
à 10 m
Température à 2m
Type de temps 1 2.7 285 14 « W‐NW »
Type de temps 2 2.94 246 16.35 « W‐SW »
Type de temps 3 3.34 200 17 « S‐SW »
Type de temps 4 1.43 352 15.55 « N‐NW »
Type de temps 5 0.79 322 16.5 « N‐NW »
Type de temps 6 1.18 240 20.1 « W‐SW »
Type de temps 7 1.51 94 22.48 « E »
Type de temps 8 2.27 10 17.53 « N‐NE »
Tableau 4.2 – Caractéristiques météorologiques des types de temps.
• Le type de temps 1 correspond à un écoulement ouest-nord ouest « W-NW » d’intensité 2.7 m/s et de température de 14 degrés, et correspond à une pollution d’Indice 1.
• Le type 3 correspond à un écoulement sud-sud ouest « S-SW » d’intensité 3.34 m/s et de température de 17 degrés, et correspond à une pollution d’Indice 2.
• Les types de temps 2 et 6 correspondent à des écoulements d’ouest-sud ouest « W-SW » d’intensités (respectivement de 2.94m/s et 1.18 m/s) et de températures différentes (3.75 degrés de différence). Ces deux types correspondent respectivement à une pollution d’Indice 2 et 3.
• Les types de temps 4 et 5 correspondent à des écoulements nord-nord ouest « N-NW» d’intensité 0.44 m/s et de températures similaires (0.44 degrés de différence). Ces deux types correspondent à une pollution d’Indice 3.
• Le type 7 correspond à un écoulement sud-sud est « S-SE » d’intensité 1.51m/s et de forte température (22.48 degrés). Ce type correspond à une pollution d’Indice 4.
• Le 8 correspond à un écoulement nord-nord est « E » d’intensité 2.27m/s et d’une température de 17.53 degrés. Ce type correspond à une pollution d’Indice 4.

94
La Figue 4.9 résume notre algorithme de classification.
Figure 4.9 – Schéma fondamental de la méthode ; le haut de la figure représente la classification des situations météorologiques en classe ; le bas montre l’association entre
les classes et les types de temps.
4.3.2 Intérêt de l’utilisation des types de temps
Notre méthode d’analyse nous permet non seulement de caractériser chaque classe par un type de temps et un indice de pollution, mais aussi par un spectre d’épaisseur optique à trois longueurs d’onde (430nm, 760nm, 870nm) et un profil vertical de concentration massique CHIMERE comme le montre les deux Figures 4.10 et 4.11.

95
Figure 4.10 ‐ Spectre caractéristique de l’épaisseur optique à trois longueurs d’ondes (430nm, 760nm, 870nm) pour chaque classe.
Figure 4.11 ‐ profil CHIMERE caractéristique pour chaque classe (20 niveaux).

96
Les huit spectres d’AOT de la Figure 4.10 et les profils verticaux de (PM10) CHIMERE de la Figure 4.11, qui caractérisent les différentes classes sont bien évidemment différents entre eux. Nous pouvons s’en assurer en regardant les spectres d’AOT sur la même figure (voir Figure 4.12). A partir de la Figure 4.12, nous pouvons non seulement affirmer que les huit spectres sont différents les un des autres, mais se classent aussi en respectant la moyenne et l’indice de pollution correspondant à chaque classe.
Figure 4.12 ‐ Spectre caractéristique de l’épaisseur optique à trois longueurs d’onde (430nm, 760nm, 870nm) pour les huit classes.
La Figure 4.13, est un zoom de la partie basse des profils verticaux de (PM10) CHIMERE (Figure 4.11), nous avons rajouté aussi la valeur moyenne de (PM10)Obs de chaque classe (étoile rouge sur la Figure 4.13).
Cette Figure, montre que les profils de (PM10) CHIMERE en noir ainsi que la valeur moyenne de (PM10)Obs en rouge sont différents d’une classe à une autre. Nous notons la parfaite estimation de la pollution du modèle CHIMERE pour les classes 2, 4 et 8. Le profil CHIMERE
C8
C7
C6
C4
C3
C2 C1
C5
Indice 4
Indice 3
Indice 2
Indice 1

97
caractéristique de la classe 5 détecte un nuage d’aérosols à 1800 m (Voir partie 3.4.2 et Figure 3.12).
Figure 4.13 ‐ profils CHIMERE et valeurs de (PM10)Obs caractéristiques des huit classes.
Chaque classe est aussi caractérisée par une relation entre l’épaisseur optique et la concentration massique en (PM10). Les Figures 4.14 (a‐b‐c‐d‐e‐f‐g‐h) et (i‐j‐k‐l‐m‐m‐o‐p) présentent respectivement les diagrammes de dispersion de (PM10)Int et (PM10)Obs en fonction de l’épaisseur optique (AOT) pour les huit classes et cela pour les deux bases de données constituant data‐2 , c’est‐à‐dire data‐2‐app (en noir sur la Figure 4.14) et data‐2‐test (en rouge sur la Figure 4.14).

98
Figure 4.14.a – Diagramme de dispersion
entre l’AOT et (PM10)Int (μg/m3) pour la classe 1.
Figure 4.14.i – Diagramme de dispersion
entre l’AOT et (PM10)Obs (μg/m3) pour la classe 1.
Figure 4.14.b – Diagramme de dispersion entre l’AOT
et (PM10)Int (μg/m3) pour la classe 2.
Figure 4.14.j – Diagramme de dispersion
entre l’AOT et (PM10)Obs (μg/m3) pour la classe 2.
Figure 4.14.c: – Diagramme de dispersion
entre l’AOT et (PM10)Int (μg/m3) pour la classe 3.
Figure 4.14.k– Diagramme de dispersion
entre l’AOT et (PM10)Obs (μg/m3) pour la classe 3.

99
Figure 4.14.d – Diagramme de dispersion
entre l’AOT et (PM10)Int (μg/m3) pour la classe 4.
Figure 4.14.l – Diagramme de dispersion
entre l’AOTet (PM10)Obs (μg/m3) pour la classe 4.
Figure 4.14.e – Diagramme de dispersion
entre l’AOT et (PM10)Int (μg/m3) pour la classe 5.
Figure 4.14.m: – Diagramme de dispersion
entre l’AOT et (PM10)Obs (μg/m3) pour la classe 5.
Figure 4.14.f – Diagramme de dispersion
entre l’AOTet (PM10)Int (μg/m3) pour la classe 6.
Figure 4.14.n – Diagramme de dispersion
entre l’AOT et (PM10)Obs (μg/m3) pour la classe 6.

100
Figure 4.14.g – Diagramme de dispersion entre l’AOT
et (PM10)Int (μg/m3) pour la classe 7.
Figure 4.14.o – Diagramme de dispersion
entre l’AOT et (PM10)obs (μg/m3) pour la classe 7.
Figure 4.14.h– Diagramme de dispersion
entre l’AOT et (PM10)Int (μg/m3) pour la classe 8.
Figure 4.14.p – Diagramme de dispersion
entre l’AOT et (PM10)Obs (μg/m3) pour la classe 8.
Figure 4.14 ‐ Diagramme de dispersion entre (PM10)Int (respectivement (PM10)Obs) et AOT pour les huit classes.

101
4.4 Mise au point de huit fonctions prédictives de la pollution
Comme nous pouvons le constater à partir de la Figure 4.14 la relation dans chaque classe entre les PM10 et l’AOT n’est pas linéaire. Estimer les concentrations massiques à partir des épaisseurs optiques en effectuant une régression linéaire comme dans l’étude précédente (voir 3.4.2), ne donnera pas des concentrations massiques en PM10 satisfaisantes. Pour cette raison nous allons utiliser une méthode non linéaire pour la prévision.
L’algorithme des cartes auto‐organisatrices sera utilisé ici aussi, mais dans un but de prédiction. Nous allons donc utiliser les cartes auto‐organisatrices pour prévoir la concentration massique en PM10 à partir des AOT et cela pour chaque classe. Afin d’affiner la relation AOT PM10 que nous voulons déterminer, nous utiliserons comme variables d’entrée de la carte auto organisatrice, les spectres d’AOT et les variables météorologiques locales (profil de vent zonal, vent méridionale, température à Lille). On a donc huit cartes auto organisées. Chaque neurone peut alors être associé à une moyenne de (PM10)Int, (PM10)Obs, et à un profil vertical de PM10 CHIMERE. De cette manière, on obtient trois fonctions non paramétriques permettant de prédire les différentes relations AOT PM10. Nous présentons dans la suite les performances des 3*8 relations établies (trois relations par type de temps).
Pour plus de précision dans la prévision, nous avons choisi une grande carte carrée de 36 neurones (6*6). Pour chacune des huit cartes apprises, Le Tableau.4.3, montre le nombre de données utilisées pour l’apprentissage et le test pour chaque classe. Bien entendu, un nombre plus grand d’observations, doit permettre d’affiner encore les relations que nous allons établir.
Classe 1
Classe 2
Classe 3
Classe 4
Classe 5
Classe 6
Classe 7
Classe 8
Total
Ensemble d’apprentissage
56 105 25 66 53 99 206 66 Data‐2‐app
Ensemble de test
27 25 4 13 12 11 49 19 Data‐2‐test
Tableau.4.3 ‐ Nombre de données participant à l’apprentissage et au test pour chaque classe.
Pour chacune des fonctions considérées et pour chaque classe, nous avons entrainé la carte auto organisatrice qui lui est dédiée à l’aide des données de data‐2‐app qui lui sont dédiées et teste les performances sur data‐2‐test.

102
La Figure 4.15, présente pour les données de data‐2‐test, les diagrammes de dispersion entre la valeur initiale et celles obtenues par nos fonctions non paramétriques de régression.
La Figure 4.15 (a‐b‐c‐d‐e‐f‐g‐h), montre les diagrammes de dispersion de la concentration massique intégrée estimée par nos fonctions non paramétriques de prévision appelée (PM10)Int_estimèe en fonction de la concentration intégrée donnée par le modèle CHIMERE (PM10)Int. La Figure 4.15 (i‐j‐k‐l‐m‐n‐o‐p), montre le diagramme de dispersion de la concentration massique estimée par nos fonctions de prévision (PM10) estimée par rapport à la concentration massique mesurée à 2m (PM10) Obs.
(a) (i)
(b)
(j)
(PM10)Int
(PM10)Int
(PM10)Obs
(PM10)Obs
Classe 1 Classe 1
Classe 2 Classe 2

103
(c) (k)
(d)
(l)
(e) (m)
(PM10)Int
(PM10)Int
(PM10)Int
(PM10)Obs
(PM10)Obs
(PM10)Obs
Classe3 Classe 3
Classe 4 Classe 4
Classe 5Classe 5

104
(f) (n)
(g) (o)
(PM10)Int
(PM10)Int
(PM10)Obs
(PM10)Obs
Classe 6 Classe 6
Classe 7 Classe 7

105
(h) (p)
Figure 4.15 – Diagrammes de dispersion entre ((PM10) Int à gauche pour les huit classes (respectivement (PM10)Obs à droite) et ((PM10)Int estimée par nos fonctions non
paramétriques de régression (respectivement (PM10)Obs estimée ).
Pour évaluer numériquement nos performances de prévision, nous avons utilisé les mêmes indices d’évaluation que dans le chapitre 3 à savoir la moyenne relative(RRMS), et l’écart type. Nous avons ajouté à ces paramètres d’évaluation l’erreur (RMS), et le coefficient de corrélation, pour avoir une meilleure idée de l’ordre de grandeur de l’erreur commise. Le Tableau 4.4, montre les performances de la prévision (data‐2‐test) en utilisant les paramètres d’évaluation cités plus haut. Pour la prévision du profil vertical de (PM10), nous avons regardé les performances par rapport à la concentration de surface.
(PM10)Int (PM10)Obs
Classe 8 Classe 8

106
Numéro de la classe
Nombre de situations captées
RMS RRMS Moyenne Ecart type Corrélation
Classe 1 27 (PM10)obs [µg/m3] 10.61 34% 0.09 0.33 0.18
(PM10)Int [10*4 µg/m3] 3.23 39% 0.07 0.39 0
(PM10)Surface [ µg/m3] 12 .74 80% 0.21 0.80 0
Classe 2
25
(PM10)obs [µg/m3] 5.92 27% 0.03 0.28 0.60
(PM10)Int [10*4 µg/m3] 1.4 51% 0.07 0.51 0.57
(PM10)Surface [µg/m3] 8.2 99% 0.3 1.01 0.56
Classe 3
4
(PM10)obs [µg/m3] 3.34 23% 0.21 0.11 0.72
(PM10)Int [10*4 µg/m3] 5.47 9% 0.03 0.09 0.97
(PM10)Surface [ µg/m3] 4.48 25% 0.16 0.22 0.49
Classe 4
13
(PM10)obs [10*4 µg/m3] 5.18 28% 0.03 0.28 0.74
(PM10)Int [10*4 µg/m3] 9.8 27% 0.09 0.25 0.66
(PM10)Surface [µg/m3] 5.56 25% 0.12 0.22 0.90
Classe 5
12
(PM10)obs [µg/m3] 6.26 29% 0.10 0.28 0.003
(PM10)Int [10*4 µg/m3] 9.82 24% 0.08 24 0.72
(PM10)Surface [µg/m3] 15.86 39% 0.24 0.32 0.0562
Classe 6
11
(PM10)obs [µg/m3] 4.95 41% 0.13 0.41 0.82
(PM10)Int [10*4 µg/m3] 1.22 23% 0.24 0.37 0.37
(PM10)Surface [µg/m3] 7.02 26% 0.07 0.26 0.40
Classe 7
49
(PM10)obs [µg/m3] 8.6228 34% 0.04 0.17 0.92
(PM10)Int [10*4 µg/m3] 2.38 44% 0.06 0.23 0.82
(PM10)Surface [µg/m3] 8.16 47% 0.10 0.47 0.77
Classe 8
19
(PM10)obs [µg/m3] 6.84 23% 0.04 0.23 0.35
(PM10)Int [10*4 µg/m3] 3.97 5% 0.0006 0.05 0.98
(PM10)Surface [µg/m3] 3.49 17% 0.05 0.17 0.90

107
Tableau 4.3 – Performances d’erreurs d’estimation des concentrations massiques sur l’ensemble du test (data‐2‐test).
4.5. Application satellitaire pour un événement de forte pollution
Afin de vérifier la consistance temporelle de cette classification, nous avons représenté sur la Figure 4.16, la série temporelle des types de temps prévus pour l’été 2003. Cette Figure montre qu’il existe des événements météorologiques liés aux types de temps qui persistent pendant plusieurs jours.
Si on s’intéresse au mois d’aout 2003 où une grande partie de l’Europe de l’ouest incluant la France a connu une canicule exceptionnelle, nous remarquons (carré en rouge sur la Figure 4.16), que durant tous le mois les transitions s’effectuent entre les types de temps caractérisés par des indices de pollution 3 et 4 qui indiquent respectivement de forte et très forte pollution, dont l’Indice 4 (pollution très forte) est majoritaire (type de temps 7 et 8).
Figure 4.16 – Série temporelle des types de temps pour l’été 2003.

108
Nous allons nous intéresser à la première quinzaine du mois d’août où les records absolus de température maximale ont été battus sur plus de 70 stations du réseau français. La période allant du 03/08/2003 au 12/08/2003 sur la Figure 4.16, est caractérisée par le type de temps 7 et une pollution très forte (Indice 4).
La Figure 4.17, présente pour la période allant du 03/08/2003 au 12/08/2003 six images satellitaires d’épaisseur optique à 440 nm MERIS. Les rectangles noirs sur la Figure 4.17 représentent la surface carrée de résolution de 110 Km qui représente la région Lilloise utilisée pour notre étude. Cette période est caractérisée par notre outil d’analyse et de prévision par le type de temps 7 et une pollution très forte (Indice 4) (voir Figure 4.16).

109
Figure 4.17 : Images satellitaires MERIS couvrant notre zone d’étude mesurées à 12h, (a) ‐ le 05/08/2003, (b) – 06/08/2003, (c) – 08/08/2003, (d) – 09/08/2003, (e) – 11/08/2003 et
(f) – 12/08/2003.
Dans un premier temps, nous avons calculé la moyenne de l’AOT sur la surface carrée de résolution égale à 110 Km, couvrant la région Lilloise (voir Figure 4.18), ainsi que la moyenne de l’AOT de la petite surface de (15 Km) ou se trouve les cinq stations fixes de mesure de (PM10)Obs et le photomètre (voir Figure 4.19).
Figure 4.18 – Carré de surface de 110 Km de résolution couvrant Lille.

110
Figure 4.19 – carré de surface de 15 Km de résolution couvrant les stations de mesure Lilloise.
Nous allons évaluer la capacité satellitaire à estimer la pollution sur cette période de canicule caractérisée par une forte pollution. La Figure 4.20, montre les courbes d’AOT mesurées par le photomètre Lillois, le capteur MERIS à une résolution de 110 Km et 15 Km et cela pour les mêmes dates et heures (12h). Le Tableau 4.4, montre les corrélations entre les mesures de concentration massique au sol (PM10)Obs et les différentes mesures d’AOT.
Figure 4.20 – Valeurs de l’épaisseur optique (AOT) mesurée par le photomètre, le satellite MERIS à une résolution 110 Km et à 15 Km.
AOT Photomètre
AOT MERIS (110 Km)
AOT MERIS (15 Km)
Jours
AOT

111
Photomètre Satellite (résolution 110 Km)
Satellite (résolution 15 Km)
Corrélation ((PM10)Obs), AOT)
0.62 0.55 0.72
Tableau 4.4 – Corrélation entre les mesures de concentration massique (PM10)Obs) et l’épaisseur optique mesurée par le photomètre, le satellite à deux résolutions différentes
110 Km et 15 Km.
Le Tableau 4.4, montre une concentration massique au sol ((PM10)Obs plus corrélée à l’épaisseur optique satellitaire à 15 Km de résolution qu’à l’épaisseur optique mesurée par le photomètre, cela peut s’expliquer par le fait que la concentration massique en ((PM10)Obs) et l’épaisseur optique satellitaire à 15 Km de résolution sont moyennées sur la même surface, alors que la mesure du photomètre est plus locale. Ce résultat est encourageant et indique une amélioration sensible de la prévision de concentration massique à partir des spectres d’AOT satellitaires moyennés sur une surface de 15 Km.
Conclusion
Nous avons mené une étude sur cinq étés (2003‐2007) dans des conditions où la pollution particulaire présentant des périodes de faibles et fortes pollution.
Notre outil d’observation, d’analyse et de prévision de la pollution particulaire mis au point dans le Chapitre 3 a pu être validé, et cela en observant huit classes de pollution statistiquement significatives caractérisées chacune par un spectre d’épaisseur optique moyen, de profil de concentration massique PM10 CHIMERE moyen, et de la moyenne de concentration massique au sol (PM10)Obs.
A partir de cette étude nous avons proposé quatre indices de pollution allant de 1(faible pollution « moyenne d’AOT sur les trois longueurs d’onde <0.11 ») à 4 (très forte pollution : moyenne d’AOT sur les trois longueurs d’onde >0.22).
Ces huit classes correspondent à six types de temps :
• Classe 1 caractérisée par un « Indice 1 » et une direction de vent « W‐NW ».
• Classe 2 caractérisée par un « Indice 2 » et une direction de vent « W‐SW ».
• Classe 3 caractérisée par un « Indice 2 » et une direction de vent « S‐SW ».
• Classes 4 et 5 caractérisées par un « Indice 3 » et une direction de vent « N‐NW ».
• Classe 6 caractérisée par un « Indice 3 » et une direction de vent « W‐SW ».

112
• Classe 7 caractérisée par un « Indice 4 » et une direction de vent « E ».
• Classe 8 caractérisée par un « Indice 4 » et une direction de vent « N‐NE ».
Notre méthode à été validée en prédiction pour les huit classes avec un nombre de situations statistiquement significatif (20% de data‐2). Les performances de prédiction de cet outil sont maintenant satisfaisantes.
Nous avons montré dans la dernière partie de ce travail, le potentiel satellitaire pour estimer la pollution en (PM10)Obs après la classification en types de temps, en observant pour un évènement de forte pollution une corrélation significative (R=070) entre l’AOT satellitaire et (PM10)Obs , plus forte que la corrélation obtenue (R=0.60) entre l’AOT mesurée par le photomètre et (PM10)Obs.

113
Conclusion générale Cette thèse nous a permis de mettre au point une méthodologie d’analyse et de prévision de la pollution particulaire à partir de la télédétection, basée sur les réseaux de neurones. Dans ce travail, nous nous sommes focalisés sur la région Lilloise en été, en associant l’exploitation de mesures d’épaisseur optique(AOT, réseau AERONET), de concentration massique au sol (PM10)Obs, des simulations de variables météorologiques et des profils verticaux de concentration massique (PM10) donnés respectivement par le modèle météorologique MM5 et le modèle de chimie transport CHIMERE.
L’apport majeur de ce travail réside dans la définition des types de temps obtenus en classant les situations météorologiques à l’aide des cartes auto‐organisatrices. Chaque type de temps donne naissance à une classe de pollution caractérisée non seulement par des conditions météorologiques similaires, mais aussi par un spectre d’épaisseur optique à trois longueurs d’onde, une valeur moyenne de concentration massique(PM10)Obs au sol, et un indice de pollution.
La méthode a été mise au point sur une période de deux années (2006‐2007) puis validée sur une période de cinq années (2003‐2007).
Les 5 années de validation nous ont permis de distinguer huit types de temps associés à huit classes de pollution. Chacune de ces classes étant caractérisée par un spectre d’épaisseur optique à trois longueurs d’onde ainsi qu’un indice de pollution (allant de l’Indice 1 : faible à 4 : très fort). Les classes observées sont les suivantes :
‐ Classes 1 caractérisée par un « Indice 1 » et une direction de vent « W‐NW ».
‐ Classe 2 caractérisée par un « Indice 2 » et une direction de vent « W‐SW ».
‐ Classe 3 caractérisée par un « Indice 2 » et une direction de vent « S‐SW ».
‐ Classes 4 et 5 caractérisées par un « Indice 3 » et une direction de vent « N‐NW ».
‐ Classe 6 caractérisée par un « Indice 3 » et une direction de vent « W‐SW ».
‐ Classe 7 caractérisée par un « Indice 4 » et une direction de vent « E ».
‐ Classe 8 caractérisée par un « Indice 4 » et une direction de vent « N‐NE ».
La classification réalisée en huit « type de temps » s’est montrée suffisamment consistante pour permettre la mise au point de fonctions non paramétriques de prévision de la pollution particulaire. Le pouvoir prédictif est tout à fait satisfaisant. D’autre part, le passage à la télédétection satellitaire a montré que la méthode proposée possédait un fort potentiel pour effectuer une analyse spatiale de la pollution. Une étude de cas pour l’été 2003 a montré la consistance temporelle de la méthode.

114
Les perspectives de cette étude sont très nombreuses puisque :
‐ L’application de la méthodologie a de plus grandes séries chronologique doit permettre d’affiner les fonctions de prédiction
‐ Une étude de sensibilité doit permettre de déterminer l’étendue spatiale pour laquelle les types de temps déterminés à Lille sont encore valables.
‐ L’un des problèmes rencontré est celui des différentes échelles sur lesquelles sont estimées les différentes variables de l’étude. En particulier les variables météorologiques que nous avons utilisées pour déterminer les fonctions de prévision sont à une résolution de 55km, alors que les particules sont mesurées ponctuellement. L’utilisation d’une météorologie plus locale devrait permettre de raffiner ces prévisions
‐ La classification obtenue doit permettre d’analyser les profils de PM10 produits par CHIMERE et ceux estimés statistiquement. On doit de cette manière comprendre qu’elles sont les situations météorologiques qui sont le moins bien représentées par le modèle CHIMERE.
‐ A terme, il doit donc être possible d’appliquer la détermination des types de temps à d’autres zones géographiques.
‐ La prévision sur les périodes d’hiver ne doit pas poser de problèmes supplémentaires. Les études préliminaires (ACP, ..) ont été réalisées pour ces données d’hiver et les conclusions apportées sont similaires à celles de l’été. Cependant en hiver la présence importante de pluie rend les prévisions plus précaires, la survenue de la pluie change la pollution elle‐même. Il faudrait donc ajouter une étude préalable de la pluie.

115
Références
Angström, A., The parameters of atmospheric turbidity, Tellus, 16, p 6475, 1964 Aumont B. (2005). Production d'ozone troposphérique et régimes chimiques. Cours Master Recherche "SGE" spécialité "Atmosphère et qualité de l'air", Université Paris VII.
Deepak and Gali, 1991 dans Seinfeld and Pandis, 1998 Deepak, A., and Gali, G., The international Global Aerosol Program (IGAP) Plan. Deepak Publishing, Hampton, VA., 210 pages, 1991 Dubovik, O., A. Smirnov, et al., Accuracy assessments of aerosol optical properties retrieved from Aerosol Robotic Network (AERONET) Sun and Sky radiance measurements, J.Geophys. Res., 105(D8), p 9791‐9806, 2000. Forster, P., V. Ramaswamy, P. Artaxo, T. Berntsen, R. Betts, D.W. Fahey, J. Haywood, J.Lean, D.C. Lowe, G. Myhre, J. Nganga, R. Prinn, G. Raga, M. Schulz and R. VanDorland, Changes in Atmospheric Constituents and in Radiative Forcing. In: Climate Change 2007: The Physical Science Basis. Contribution of Working Group I to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change [Solomon, S., D. Qin, M. Manning, Z. Chen, M. Marquis, K.B. Averyt, M.Tignor and H.L. Miller (eds.)]. Cambridge University Press, Cambridge, United Kingdom and New York, NY, USA, p 129‐234, 2007 Ginoux, P., Prospero, J.M., Torres, O., Chin, M., Long term simulation of dust distribution with the GOCART model: correlation with the North Atlantic Oscillation. Environmental Modeling and Software 19, 113‐128, 2004.
Gras, J. L., Southern hemisphere tropospheric aerosol microphysics, J. Geophys. Res.,96(D3), p 5345–5356, 1991
Green, D., Fuller, G., Barratt, B., Evaluation of TEOM ‘correction factors’ for assessing the EU Stage limit values for PM10, Atmos. Environ., 35, p 2589 – 2593, 2001. P32
Herman J. R, P. K. Bhartia, O. Torres, C. Hsu, C. Seftor, and E. Celarier, Global distribution of UV‐absorbing aerosol from Nimbus 7/TOMS data, J. Geophys. Res., 102, p 16911‐16922, 1997a Holben, B. N., T. F. Eck, et al., AERONET‐A federated instrument network and data archive for aerosol characterisation, Rem. Sens. Environ, 66, p 1‐16, 1998 P32
Jaenicke R., Tropospheric aerosols, In Hobbs, P. V. editor, Aerosol‐Cloud‐Climate interactions, p 1‐31, Academic Press, San Diego, CA, 1993
116
Meloë Kacenelenbogen‐Tilot, Application de la télédétection spatiale à la surveillance de la pollution en aérosols ,2008.
Mie, G., Beiträge zur Optik trüber Medien, speziell kolloidaler Metallösungen, Ann. Geophys., 25, p 377‐445, 1908.
Patasnick, H., Rupprecht, E.G., Continuous PM‐10 measurement using the tapered element oscillating microbalance , J Air waste Manage Assoc., 41, p 1079‐1083, 1991.
Ramaswamy, V., O. Boucher, J. Haigh, D. Hauglustaine, J. Haywood, G. Myhre, T.Nakajima, G.Y. Shi, S. Solomon, Radiative forcing of climate change. In: Climate Change 2001: The Scientific Basis. Contribution of Working Group I to the Third Assessment Report of the Intergovernmental Panel on Climate Change [Houghton, J.T., et al. (eds.)]. Cambridge University Press, Cambridge, United Kingdom and New York, NY, USA, p 349–416, 2001. Rast, M., Bezy, J.L., and Bruzzi, S., “The ESA Medium Resolution Imaging Spectrometer MERIS: A review of the instrument and its mission”, International Journal of Remote Sensing, 20, pp. 1681‐1702, 1999. Schmidt, H., Derognat, C., Vautard, R., Beekmann, M., A comparison of simulated and observed ozone mixing ratios for the summer of 1998 in Western Europe, Atmos. Environ., 35, 6277–6297, 2001. Stull R.B., An introduction to boundary layer meteorology, Ed. Springer, ISBN : 978‐90‐277‐2769‐5, 680 pages, 1988. 26 Vestreng, V., Review and revision of emission data reported to CLRTAP, EMEP Status Report, July 2003. Van Loon M., Model intercomparison in the framework of the review of the unified EMEP model. Technical report TNO‐MEP R2004/282, Apeldoorn, The Netherlands, 2004. Vautard R., Builtjes P. H. J., Thunis P., Cuvelier C., Bedogni M., Bessagnet B., Honoré C., Moussiopoulos N., Pirovano G., Schaap M., Stern R., Tarrason L. et Wind P. (2007). Evaluation and intercomparison of Ozone and PM10 simulations by several chemistry transport models over four European cities within the CityDelta project. Atmospheric Environment 41(1): 173‐188.
Vestreng, V., Review and revision of emission data reported to CLRTAP, EMEP Status Report, July 2003.

117





























