Embed Size (px)
Citation preview

Theory of accelerated orbits and space charge effects in anAVF cyclotronCitation for published version (APA):Kleeven, W. J. G. M. (1988). Theory of accelerated orbits and space charge effects in an AVF cyclotron.Technische Universiteit Eindhoven. https://doi.org/10.6100/IR288492
DOI:10.6100/IR288492
Document status and date:Published: 01/01/1988
Document Version:Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers)
Please check the document version of this publication:
• A submitted manuscript is the version of the article upon submission and before peer-review. There can beimportant differences between the submitted version and the official published version of record. Peopleinterested in the research are advised to contact the author for the final version of the publication, or visit theDOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and pagenumbers.Link to publication
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal.
If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, pleasefollow below link for the End User Agreement:www.tue.nl/taverne
Take down policyIf you believe that this document breaches copyright please contact us at:[email protected] details and we will investigate your claim.
Download date: 16. Feb. 2022

THEORY OF ACCELERATED ORBlTS AND SPACE CHARGE EFFEaS
IN AN AVF CYCLOTRON
W J.G.M. KLEEYEN

THEORY OF ACCELERATED ORBlTS AND SP ACE CHARGE EFFECTS IN AN AVF CYCLOTRON
PROEFSCHRIFT
ter verkrijging van de graad van doctor aan de Technische Universiteit Eindhoven, op gezag van de Rector Magnificus, prof. dr. F.N. Hooge, voor een commissie aangewezen door het College van Dekanen in het
openbaar te verdedigen op vrijdag 19 augustus 1988 te 16.00 uur
door
WILLEM JAN GERARD MARIE KLEEVEN geboren te Horst
,.

Dit proefschrift is goedgekeurd door de promotoren: prof dr. ir. H.L Hagedoorn en prof. dr. F.W. Sluijter en de copromotor dr. ir. J.A. van der Heide

Aan mijn oude:rs

1. INTRODUCI'ION 1
1.1. General introduetion 1
1.2. Scope of the present study 3
2. THE MINICYanrRON PROJECf ILEC 7
2.1. Introduetion 7
2.1.1 Objectives of ILEC 7
2.1.2 Some main characteristics of ILEC 9
2.2. The ILEC magnetic field 13
2.3. The central region of ILEC 18
2.4. Calculation of extracted orbits 24
3. THEORY OF Aa:::ELERATED ORBlTS IN AN AVF CYCLOTRON 31
3.1. Introduetion 31
3.1.1 Representation of the partiele motion 32
3.1.2 Survey of this chapter 34
3. 2. The basic Hamil tonian 38
3.2.1 Representation of the magnetic field 39
3.2.2 Representation of the electric field 40
3.2.3 The basic Hamiltonian 44
3.3. The time independent orbit behaviour 45
3.3.1 The motion with respect to the equilibrium orbit 46
3.3.2 Definition of the orbit centre 51
3.3.3 The position of the partiele in terms of the
canonical variables 58
3.4. Accelerated partiele orbits in an AVF cyclotron 60
3.4.1 The accelerated equilibrium orbit 63
3.4.2 The motion with respect to the AE0 65
3.4.3 Flattopping 70
3.5. Resonances resulting from interference between the dee
system and the flutter profile 74

Appendix A: Same details in tbe derfvation of tbe time
independent orbt t bebaviour 79 A.l. Elimination of tbe equilibrium orbit 79 A.2. EUmination of tbe osctllating terms from tbe
Hami 1 tonfan 83
A.3. The relations between tbe post tton coordinates and
· tbe canonical variables 89
4. KOMENT AHALYSIS OF SPACE OIARGE EFFECTS IN AN AVF C't'CIDI'RON 91
4.1 Introduetion 91
4.2 Baste equations 93
4.3 The single partiele HamUtontan 96
4.4 The electria potenttal lunetion 106
4.5 Moment equations 112
4.6 Conelusion 120
5. <X>NCJJDING REMARKS 123
REFERENCES 127
SUMMARY 131
SAMENVATIING 133
NAWOORD 135
~p 1~

1. INTRODUCTION
1.1. General introduetion
Since the first cyclotron was built by Lawrence 1) in 1929
accelerator designers extended their knowledge on beam dynamics in
circular accelerators considerably. At present there is still much
effort devoted to this aspect of accelerator design. The main reason
for this is that nowadays ever higher requirements are made with
regard to the performance of accelerators. It is the main purpose of
this thesis to present some new theoretica! insights in different
aspects of cyclotron beam dynamics that are of present interest. In
this general introduetion some basic developments made in this field
within the past will be outlined briefly in order to provide some
background for the analysis presented in this thesis.
Initially the theoretica! workon beam dynamics delt with the
partiele motion in the cylindrically symmetrie magnetic field of the
classica! cyclotron. In order to simplify that problem it was found
useful to separate the influences due to the accelerating electric
fields from the effects on the particles by the magnetic field. The
acceleration effects then are mainly considered in terms of the
vertical focussing action of the electric fields in the central
region 2>. The properties of the magnetic field are evaluated by
analyzing the time-independent orbit behaviour, i.e. the motion of a
partiele with constant energy. Such a partiele oscillates
horizontally and vertically around an ideal (equilibrium) orbit. For
a cylindrically symmetrie magnetic field this is a circle in the
median plane of the cyclotron. These oscillations were first studied
extensively in conneetion with the betatron accelerator and therefore
became known as betatron oscillations 3>. The frequencies of the
betatron oscillations provide a good measure for the focussing
properties of the magnetic field: the higher the betatron frequencies
the better the focussing of the beam.
As was already recognized in 1937 4>, the maximum energy
obtainable wi th a classica! cyclotron is limi ted d.ue to the
relativistic mass increase of the particles during acceleration. This
gives rise to phase shift between the revolution period of the
particles and the period of the RF electric field. This loss of
1

isochronism can not be compensated by applying a cylindrically
symmetrie magnette field which increases to larger radii because then
the vertical oscillations of the particles become unstable. An important impravement came with the invention ot an extra magnette
vertical focussing by Thomas S} in 1938 and its application 1:ri the
azimuthally varying field (AVF} cyclotron 6 • 7}. In an AVF cyclotron
the equilibrium orblts are no longer circles but closed orblts with
the same rotational symmetry as the magnette field. The extra verti
cal focussing resul ts from the azimuthal component of the magnette ·
field near the median plane and the radial veloei ty component which
give together a vertical component of the Lorentz force. The essen
tlal feature of an AVF cyclotron is that vertical stability can be
obtained also when the average magnette field increases with radius.
This makes it possible to keep the revolution frequency constant by
compensating for the relativistic mass increase by a corresponding increase of the average magnette field with radius.
Naturally, the introduetion of azimuthally varying magnette
fields complicated the analytica! treatment of cyclotron orblts
substantially. Nevertheless, by the work of a number of people the theory for non-accelerated particles developed rapidly S-12>. The
main purpose of this work was to obtain quant i tative means by which
the quality of the magnette field could be evaluated. Important quantities in this respect are the betatron frequencies and the
deviation between the actual average magnette field shape and the
ideal field shape necessary for isochronism (i.e. a constant
revolution frequency independent of energy}. For stability also the
non-linear character of the motion and the influence of small
magnette field errors are of importance. An extensive treatment of
non-accelerated orbi ts in an AVF cyclotron bas been pub! ished by
Hagedoorn and Verster 12) in 1962.
In recent years progress bas been made also with regard to the influence of dee structures on the orbit behaviour l3-16>. Before
that, acceleration effects were mostly treated separately from the
transverse orbit behaviour 17) or they were simulated by slowly
changing the relevant radius dependent parameters in the · time-independent orbit theory for the transverse motion 18). The
gel:!metrical shape of the dees is very important in the central region
of the cyclotron. Effects at larger radii have to be considered when
2

resonances introduced by the geometrical structure of the dees are
present. The need for a better insight into these problems also
arised with the development of high energy heavy ion cyclotrons where
the RF frequency may be equal to several times the revolution
frequency 13>. In such cases there may be astrong influence of the
transverse motion of the particles on the longitudinal motion and
vice versa. Some ten years ago Schulte and Ragedoorn 13- 15) developed
a general theory for the non-relativistic description of accelerated
particles in a cyclotron. This theory allows a simultaneous treatment
of the transverse and longitudinal motion and clearly shows the
influence of the accelerating structure. They work out the theory in
detail for particles in a cyclindrically symmetrie magnetic field and
indicate briefly how azimuthally varying magnette fields may be
incorporated 19>. Intheir treatment they used cartesian coordinates
since this turned out to be conventent for the description of the
acceleration process. If azimuthally varying magnette fields are to
be incorporated the use of cartesian coordinates turns out to become
rather complicated however.
In the past few years there bas been an increasing demand at
several cyclotron laboratorles for higher beam intenstties 20-23).
Therefore, the influence of space charge effects bas become
increasingly important. The space charge effect is a collective
effect in the sense that the Coulomb interaction between an
individual partiele and the electromagnetic self-field produced by
the beam plays an essential role. Analytica! studies of this problem
which appeared in literature thus far mainly deal with linear
accelerator structures 24- 26>. Up until now the analysis for the
cyclotron is mostly done with numerical calculations basedon many
partiele codes 23 •27)
1.2. Scope of the present study
One of the main subjects to be studled in this thesis is the
influence of the accelerating electric field on the motion of
particles in a cyclotron. A general relativistic theory will be
derived which allows a simultaneous study of the transverse and
longitudinal motion as well as the coupling between both motions.
This theory includes azimuthally varying magnetic fields and
therefore also decribes phenomena which are due to the intertering
3

influenees of a given geometrieal dee system with the azimutbally
varying part of the magnette field. An example of this is the
electrie gap crossing resonance 2S). The treatment is in fact a
generalization of the theory for aceelerated partieles in a cyclotron as developed by Schulte and Hagedoorn 13- 14). An important dUferenee
ts however that we start the derivation in polar instead of cartesian
eoordinates. This makes it possible to incorporate azimuthally
varying magnet ie fields in a more conventent wa:y. avoiding the
complex representation of these fields in cartesian coordinates.
Nevertheless, af ter some canonical transformatlans we end up wi tb the
same final representation of the partiele motion as in Ref. (13)
namely the representation by energy, phase and post U on eoordinates
of a properly defined orbit centre. Another important diEferenee with
the treatment of Schul te and Hagedoorn concerns the treatment of the
dee systems. Instead of assuming a Heaviside distributton we
represent the spattal part of the aceelerating voltage by a Fourier
series. This makes it posstble to treat different dee systems
simultaneously and to incorporate not only RF structures with one or
. two dees as in Ref. (13) but also multi-dee systems which moreover ma.y be spiral shaped. Thus most practical dee systems can be treated in a general manner.
The second main part of this thesis deals wi tb space charge
effects in an AVF cyclotron. In comparison with linear accelerator
structures, cyclotrons (and also other types of circular
accelerators} have the special feature that the transverse position of a partiele with respect to the relerenee orbit depends on the
longi tudinal momentum. This coupling is due to the dispersion in the
bending magnets, i.e. particles with a deviating longitudinal
momentum oscillate around a deviating equilibrium orbit. An important
consequence of this is that a change in longi tudinal momentum spread
due to longitudinal space charge forces immediately influences the
transverse distributton of the particles in the bunch. For instance, particles in the "tail" of the bunch ma.y lose energy due to the
repulsive longt tudinal space charge force and thus move to a lower
radius. The oppostte ma.y happen for the leading particles in the bunch. For the isochronous cyclotron there is another important
feature namely the fact that the revolution frequency does not depend
on the longi tudinal momentum. As a consequence there is no RF
4

focussing in the longitudinal phase space to counteract the
longitudinal space charge force. Numerical calculations as done by
Adam 29) show that under this condition the coupling between the
longitudinal and transverse motion can become an important effect
that strongly influences the properties of the beam.
Approximate representations for relevant properties of the bunch such
as the sizes, the momenturn spread and the emittances can be obtained
from the second order moments of the phase space distributton
function. We will derive an analytica! model which describes the time
dependenee of these moments under space charge conditions and which
takes into account the special features of an isochronous cyclotron.
The derivation of this model is based on the RMS approach {RMS stands
for Root Mean Square). The utility of this approach was first
demonstrated by Lapostolle 30) and Sacherer 2S) in conneetion with
linear accelerators. Our model takes into account the linear part of
the space charge forces as determined by a least squares metbod which
minimizes the difference between the actual shape of the electric
field and the assumed linear shape. The model does not take into
account non-linear space charge effects. For the calculation of the
self-field it is assumed that the charge distributton in the bunch
bas ellipsoidal symmetry. Since the longitudinal-transverse coupling
may destroy the symmetry of the bunch with respect to the reierenee
orbit we allow the ellipsoid to be rotated around the vertical axis
through the bunch.
The analytica! models to be developed can be used for any
specific cyclotron by adapting some relevant parameters. In this
study some results will be illustrated for the Isochronous Low Energy
Cyclotron ILEC49>. This smal! 3 MeV proton cyclotron is presently
under construction at the Eindhoven University. Most probably the
first beam will be obtained in the course of this year. One of the
aims of ILEC is to produce an extracted beam with high intensity (~
100 ~) and low energy spread(~ 0.1%). To achieve this the cyclotron
will be equipped with two 6th harmonie dees for the application of
the flattopping principle. The acceleration itself will be done with
two
2nd harmonie dees. The rather.complex configuration of main dee
system and flattopping system was also one of the motivations_to
study the influence of muiti-dee systems in more detail. The aim to
reach a high beam current and a low energy spread was the main reason
5

for our interest in the influence of' space charge effects. Since an
important part of this study was started in relation with ILEC we
sball devote some attention to tbe construction of tbis machine in
cbapter 2. In cbapter 3 tbe general theory lor accelerated orbits in
an AVF cyclotron will be presented. The a:nalytical treatment of space
charge effects will be given in cbapter 4.
6

2. 1llli MINICYa.oTRON PROJECf ILEC 49)
2.1. Introduetion
The Isochronous Low Energy Oyclotron (ILEC) is designed for
the acceleration of protons to a fixed energy of 3 MeV. The first
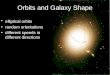
beam is expected in the course of this year. In Fig. {2.1} we give an
artistic view of the cyclotron. In Fig. (2.2) a layout of its main
components is given. Figure (2.3) shows a photograph of ILEC as it is
installed at the Eindhoven University. The main technica! parameters
are summarized in table I.
In this chapter we give the objectives and the main
characteristics of ILEC. Furthermore we give a brief overview of the
numerical orbit calculations which were carried out during the
construction of ILEC. Attention is paid also to the measurement of
the magnetic field in the median plane and the measurement and
numerical calculation of the electric field shape in the centre of
the cyclotron. The discussion of the orbit calculations deals mainly
with the evaluation and optimization of the magnetic field
properties, the calculation of first orbits and the calculation of
the extraction process. The results given should be considered as
illustrative examples.
2.1.1. Objectives of ILEC
At the time that the project was started it was recognized
that the cyclotron should have to be realized to a large extent by
students and that it should ask for only a modest financial
investment. For this reason it was decided to built a small machine.
Nevertheless this machine should offer the opportunity to do
accelerator research compatible with larger cyclotrons.
Furthermore the cyclotron should be suited for applications like
mieroprobe element analysis 31>. For this purpose it is desirabie to
have a beam with high intensity and low energy spread. This explains
our interest in the influence of space charge effects. In summary the
main objectives of ILEC are:
1} to produce a 3 MeV proton beam with high intensity {2 100 ~) and
low energy spread (~ 0.1%)
7

2) to create a facility for expertmental studies of the influence of
space charge on the beam properties like the bunch-sizes,
emi ttances and energy spread
3) to apply the machine as a mieroprobe facility for element analysis
4) to apply the machine as a proton injector for EUTERPE 32). This is
a small electron-proton storage ring planned to be built at the
Eindhoven University.
a:ion-source . b: mo.gnet-coil c: resonator-tank d: extrador
. e:Oee-system
f. vacuumchamber g: hydrauUc-liff device h: adjustable -support i:vacuumpump j: beam-exit
Fig. (2.1): Artistic view of the minicyclotron ILEC. Dimensions in millimeters. Drawn by P. Magendans.
8

2.1.2. Some main cbaracteristics of ILEC
The ILEC magnetic field possesses four-fold rotational
symmetry. The azimuthal variation of the magnetic field is realized
with four straight sector-shaped hills with an azimuthal width of 40°
and four valleys with an azimuthal width of 50°. The radial growth of
the average magnetic field as needed for isochronism is realized by
increasing the height of the hills with radius. In order to reduce
the ampere turns needed for generating the main magnetic field it is
profitable to apply a smal! gap between the poles of the cyclotron.
In ILEC the average gap-width is kept smal! by placing the R.F.
accelerating structure (the dees) in the valleys of the magnet.
To assure a stabie acceleration process, two dees are used
which are located in two opposite valleys of the magnet (see Fig.
(2.2)). They are operated in the push-push mode (i.e. both dees
oscillate in phase) and in the second harmonie acceleration mode
(i.e. the frequency of the accelerating voltage equals two times the
(ideal) revolution frequency of the particle}.
In addition to its smal! dimensions there is another special
feature in the construction of ILEC namely the application of the
flattopping principle. This technique must provide a proper basis for
high beam currents and low energy spread. To achieve such beam
properties it would be favourable to have a block-shaped time
dependenee of the accelerating voltage because then half of a RF
period would be available for acceleration and the energy gain per
turn would be phase-independent. In the flattopping principle the
block-shape is approximated by adding to the basic sinusoirlal
accelerating voltage its third harmonie Fourier component with the
proper phase and amplitude. In ILEC this third harmonie signa! (sixth
harmonie with resPect to the revolution frequency} is fed to two
additional dees which are placed on two opposite hills.
ILEC is equipped with an internal ion source, located in the
centre of the cyclotron and mounted through an axial hole in the
yoke. It is a Penning souree with self-heated cathodes. The design is
a scaled-down version of a construction proposed by Bennett 33>. When the particles have reached their final energy, they are
extracted from the cyclotron. This is done with a horizontal D.C.
electric field applied between the two electrodes of an electrostatic
deflector (the extractor). The inner electrode (the septum) must not
9

Fig. (2.2): Lay-out of the minicyclotron ILEC
10
(drawn by P. Magendans). The magnatie focussing channel (not shown in the figure) wil! be placed in the dee on the right. In order to compensate the first harmonie field perturbation produced by one channel an identical dumm,y wil! be placed in the dee on the left. Also not shown in the figure are the magnetic field correcti.on coils. These wUI be placed in the two valleys not used for the 2nd harmonie dees and the two hills not used for the 6th harmonie dees.

affect the internal orbits and therefore will be kept at ground
potential. The outer electrode will be on a negative potentlal such
that the electric field is directed outward.
After passing the extractor the particles enter into the
fringing field of the magnet. In this part of the cyclotron the beam
experiences a strong horizontally defocussing action which is due to
the negative gradient (in outward direction) of the magnetic field .
In order to prevent that the beam diverges to much, some kind of
focussing must be applied before the beam leaves the cyclotron. In
ILEC this is done with a passive magnetic focussing channel. Such a
channel is built up of small iron bars which are magnetized by the
main field of the cyclotron, The bars are shaped and arranged in such
a way that the magnetic field produced by the bars has an approxima
tely constant positive gradient in outward direction normal to the
beam. This field-shape counteracts the defocussing action of the
fringing field .
Fig. (2. 3): The Isochronous Low Energy Cyclotron (ILEC) as installed at the Eindhoven University.
11

Jl'agnet systea
4-fold rotational syDDDetry
radial hUls (40°, gap 33-36 11111)
flat valleys (50°, gap 50 nm)
pole radius: 20 cm
extraction radius: 17.3 cm
linal energy: 2.9 MeV
average magnette field: 1.43 T
field flutter: ~ 0.25 . . -4
field stability: 2•10
main eoils: 2 x 140 A x 192 turns
power eonsumption: 6.3 k'W
weight: 3 tons
harmonie corr. eoils
on hUls 2x2x2
in valleys: 3 x 2 x 2
Flattop system
2 separate 6th harmonie dees
dee a:ngle: < 40° (r-dependent)
gap voltage: ~ 3.5 kV
dee/dunmy-dee gap: 6 11111
verticàl aperture: 15 11111
Q-value: 500
Ion souree . self heated ca~e PIG souree (Bennett type 33))
anode material: copper
catbode material: tantalUIII
RF system
two coupled dees
2nd harmonie aceeleration
push-push mode
dee a:ngle: 50°
gap voltage: 36 kV
dee/dUJIIIlY-dee gap: 8 111111
vertical aperture: 15 111111
voltage stabiltty: < 10-4
frequency: 43.5 ± 0.5 MHz
frequency stability: 10-7
drive: < 10 k'l class AB
coupling: capacitive
Q-value: 2000
rough tuning: moving short
fine tuning: capacitive
Va.cuua systeaa
working pressure: 10-5 torr ·
oll dilfusion pump: 3000 1/sec
rotary pump: 20 m3/h
vacuum ehamber
length
width
helgth
material
1200111111
720 lllll
125 11111
alumlniUIII
Extraction systea '\
electrostatle dellector and
passive magnette focussing
cha.nnel
Table I: the main technica! parameters of ILEC
12

2.2. The ILEC JmgDetic field
The magnetic field in the median plane of the cyclotron bas
been mapped with the aid of automatic and computer controlled roea
suring equipment. The measuring device is a Hall probe. This probe
was calibrated against NMR. The calibration curve of the Hall probe
was fit with a fifth degree polynomial. The current through the Hall
probewas kept constant with a precision current source.
The measuring equipment consists of a magnetic field measuring
machine (MMM), constructed at the Philips Research Laboratories, and
an electronic system that controls the positioning of the probe and
amplifies, measures and digitizes the Hall voltage. A schematic lay
out of the equipment is given in Fig. (2.4). Figure {2.5) shows a
photograph of the magnet placed in the measuring machine. The Hall
probe can be positioned in cartesian coordinates with steps of 0.1
mm. In the computer programs a new position of the probe can be
called with a FORTRAN routine named NEWPOS. Another routine {SADC) is
used to select an output signal of the MMM and the gain by which this
signal is amplified. It also reads the output of the 16 bits ADC {see
Fig. (2.4)).
HHN
\ " ~~ cyclotron multi- pro ~
'I / plexer am C magnet . '--
..f=::::=l.. control dat a ~ ~~ me a at a
COMPUTER
Fig. {2.4): A schematic lay-out of the J~etic field measuring equipment
To obtain a complete map of the median plane magnetic field,
different computer programs have to be runned. First of all, the
program ZILEC searches the magnetic centre in the median plane.
13

Fig. (2.5} The ILEC magnet placed in the magnetic field measuring machine.
After that another program (MILEC) measures the magnetic field along
circles and stores the data on disk . In order to increase the roea
suring accuracy, linear interpolation between surrounding points in
the rectangular coordinate system is applied. After a measuring cycle
a check of the magnetic field in the cyclotron centre is made in
order to correct fora possible drift of the Hall probe. With this
correction the relative error in the measured average magnetic field
is estimated to be of the order of 0.01%. The program TILEC trans
forms the Hall voltages into magnetic field values using the cali
bration curve of the Hall probe and finally the program FILEC makes
a Fourier analysis of the magnetic field and stores the relevant data
in a file . This file serves as input for several orbit calculation
codes. In the numerical orbit calculation codes, the magnetic field
in the median plane is represented in the following form:
B(r,B}
14
B(r} {1 + ! [An(r)cosnB + Bn(r}sinnB]} n
(2.1}

where B(r) is the average magnetic field and A {r) and B {r) are the n n Fourier components of the flutter profile.
The theory to be developed in chapter 3 can be used to study
the properties of accelerated orbits in a cyclotron. Usually the
properties of the magnetic field are studied via the orbit charac
teristics of non-accelerated particles. Particles with a given
kinetic momenturn P oscillate horizontally and vertically around the 0
static equilibrium orbit (SEO). This special orbit is defined as a
closedorbit in the median plane of the cyclotron which has the same
rotational symmetry as the main magnetic field. The frequencies vr
and v of the betatron oscillations are a measure for the horizontal z and vertical focussing strength of the magnette field. To ensure
stabie partiele orbits the quantities v; and v; have to be positive.
Another important quantity is the deviation between the measured
average magnette field and its ideal isochronous shape B1
{r) so belonging to the measured azimuthal field variation.
In Ref. {12} analytica! expresslons are given for v , v2 and B1 {r) r z so in termsof the magnetic field quantities defined in Eq. (2.1). The
expresslons for v and B1
{r) are derived as well in the third r so
chapter of this thesis but via a more general analysis.
The oscillation frequeneies and the isochronous field can be found
also with numerical orbit integrations. For this purpose we use a
program named SEO. This program integrates the non-linear equations
of motion for a partiele moving tn the median plane and also two
systems of linearized equations which describe the horizontal and
vertical motion with respect toa particular solution of the
non-linear equations. Both the linear as well as the non-linear
equations may be found in Ref. (34).
The program SEO first calculates, by an iteration process,
the equilibrium orbits belonging to a number of different, equally
spaced, energies of the particle. An equilibrium orbit is found as
the periodical solution oÎ the non-linear equations. The calculated
equilibrium orbits are Fourier analyzed and the relevant data stored
in a file. This file serves as input for two other numerical
programs, used for central region studies (CENTRUM) and extraction
studies (EXTRACTION).
15

The program SEO also calculates, for each of the different energies,
the time needed to make one revolution on the equilibrium orbit. From
this information the deviation between the measured average field and
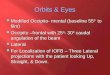
the isochronous field is easily found. In Fig. {2.6) we give both
field shapes for ILEC as a function of radius. This result was
obtained after several corrections of the pole segments as can be
seen from the photograph of the pole segment given in Fig. (2.7).
iii ] - 1.41
la::l
-- measured shape ----- isochronous shape
1.40
1.39
0 r (cm)
Fig. {2.6): The measured average magnetic field of ILEC as a lunetion of radius {drawn curve) and the numerically calculated ideal isochronous shape belonging to the measured azimuthal field variation (dashed curve).
After the equilibrium orbits have been found the program SEO
integrates the linear equations of motion. From the transfer matrices
over one revolution the oscillation ·rrequencies v and v are . r z determined (see for example Ref. (35)). In the figures (2.8) and
(2. 9} we give the resul ts obtained for the ILEC magnette fieid~
16

Fig. (2.7): Lower pole face of the ILEC magnet. The corrections shown were made in order to improve the isochronism of the magnetic field. The photograph also shows the two 2nd harmonie dees placed in the valleys.
L..
>
r(cm)
Fig. (2.8): The numerically calculated radial oscillation frequency as a function of radius for the minicyclotron ILEC.
17

riem)
Fig. (2.9): Numerica.lly ca.lculated vertica.l oscillation frequency aquared as a function of radius for the minicyclotron ILEC.
2.3. The central region of II..fX:
For the ca.lculatton of the first orblts in the centre of a cyclotron a detailed lmowledge of the eleetric field is needed. The
electrio field in the centre of ILEC bas been measured at several
gap-crossings in a 2:1 scale magnette analogue model of the central
region. The metbod is based on the similari ty between the eleetric field veetor and the magnette induction vector in air which occurs
when saturation effects in the iron of the model and stray flux due
to edge fields are avoided 36•37). In the magnette analogue metbod a
magnette model'of the electrio central region is built. The •• t
horizontal compÓnents of the magnette field are measured in the
median plane and the vertical component is measured a few millimeters
above the median plane. For the measurements we used the same
equipment as described in the previous section.
In Fig. {2.10) a drawing of the centre-geometry of ILEC is given. The correction pieces shown in this figure were mounted after preliminary measurements in order to improve the vertical electrio
focussing properties and to minimize the component of the electric
fieid in the median plane whiCh is normal to the orbit. Due to lack
18

Scm
Fig. {2.10): Schematical drawing of the centre geometry of ILEC: 1) ion souree 2) puller 3) dees 4) dummy dees 5) hills 6) correction pieces. We note that this :figure has been rotated over 90 degrees as compared with Fig. (2.2).
of space in the centr~ of ILEC it was not possible to make a complete
map of the electric field in the central region. Therefore the
electric fields were also calculated numerically with the FORTRAN
program RELAX3D. This is an interactiva program which solves the
Poisson or Laplace equation v2~ = p for a general 3-dimensional
geornetry consisting of Dirichlet and Neurnann boundaries approxirnated
to lie on a regular 3-dirnensional grid.
The finite difference equations in the grid points are solved by a
successive over-relaxation rnethod. The program has been developed at
TRIUMF by H. Houtman and C. J. Kost 3S). As input the program asks for
the dimensions of the grid (i.e. the number of points in the
19

J
J
Fig. (2.11): Equipotential lines in the median plane of the.ILEC central region as calculated wi tb RELAX3D. The upper figure shows the result in the absence of the correction pieces. The lower figure gives the result with correction pieces. Also indicated is the approximate shape of the first orbit.
20

x-direction (I ), y-direction (J ) and z-direction (k )), the max max max grid spacings in the three directions and for a specification of the
boundaries via a subroutine BND which bas to be supplied by the user.
Because of the detailed geometry in the ILEC central region we used a
rather fine grid with dimensions I x J x k = 201 x 281 x 17 max max max and a grid spacing of 0.5 mm in all three directions.
With the program RELAX3D it is possible to plot the
equipotential lines in a plane specified by the user. In Fig. (2.11)
we give as an example a plot of the equipotential lines in the median
plane near the ion-source. The upper figure gives the equipotential
lines without correction pieces and the lower figure the equipoten
tial lines after the correction pieces were mounted. A comparison of
70 E t 70
-4-- Ex -o- Ey -iE-- Ez
-y lcml x
\J lJ4
DUMMY DEE i DEE ---· _______ ....,.. . . 'I
~ Fig. {2.12): The components of the electric field (in arbitrary
units) as a function of the distance to the middle of the gap for the gap-crossing indicated by the capita! A in Fig. (2.10). The figure on the left bas been calculated with RELAX3D. On the right the results obtained with the magnetic analogue metbod are shown.
21

Fig. (2.lla) with Fig. (2.11b) shows that due to the correction
pieces. the equipotential lines between the ion souree and the puller
and in the first gap-crossing are pressed together. This is f'avou
rable for an optima! acceleration process. Furthermore the component
of the electric field which is normal to the orbi t is reduced as a
result of the correction pieces.
In Fig. (2.12) we compare. for the dee-gap crossing indicated
with the capita! A in Fig. (2.10). the measured and the calculated
electrio field as a function of the distance to the middle of the
gap. The x-component is parallel .and. the y-component normal to the
gap. These components are given in the median plane. The z-component
is given 3 IIID above the median plane. The ligure shows good agreement
between measured and calculated results. Furthermore 1t is confirmed
that the y-component of the eleetric field can in good approximation
be represented by a Gaussian profile. This is in agreement with
results of Hazewindus et. al. 36). They found that for a straight
dee/dummy-dee system the normal field component in the median plane
can be approxima.ted with the Gaussfan function:
(2.2)
where the width Ay is.related to the gap width Wand the dee-aperture
H by:
Ay ;,. 0.2 H + 0.4 W (2.3)
For the numerical calculation of the first orbits we use a
self-written program named CENTRUM. The electrio field shape in a
rectangular area of 8 by 12 cm around the centre of the cyclotron is
obtained with RELAX3D. Outside this region we use the Gaussfan
approxima.tion given in Eq. (2.2). The program CENTRUM integrates the
equations of motion in cartesfan coordinates. The electrio and
magnette field are assumed to be perfeetly symmetrie with respect to
the median plane. The vertical motion is linearized. Then the motion
of a partiele can be split in a horizontal motion in the median plane
and a linear motion in the vertical plane. where the influenee of the
vertical motion on the horizontal motion can be neglected. These
equations of motion may be found in Ref. (39).
22

For the evaluation of the numerical data obtained with the
program CENTRUM the following orbit properties can be considered:
- motion of the orbit centre (see Ref. (13} - (15), and cbapter 3 of
this thesis). For an optima! acceleration process it is favourable
tbat after a few turns the beam is well-centered. This means tbat
the orbit centre should not deviate too much from the cyclotron
centre. In CENTRUM the position of the orbit centre is calculated
by camparing the momentary position and angle of the partiele with
respect to the SEO belonging to the energy of the particle.
- the central position pbase 13- 15} and high-frequeney pbase. In
order to obtain maximum energy gain the central position pbase
should go to zero after a few turns. For a well-centered beam the
high-frequency pàase will become equal to the central position
phase.
- the vertical focussing properties. A good indication for the
vertical focussing quality is the vertical acceptance of the
central region. In section (2.4} we give figures of the vertical
acceptance after three turns and the vertical acceptance after
extraction.
- the horizontal beam spread. The horizontal size of the beam should
not become too large. In the program CENTRUM the horizontal beam
spread is studled by consiclering the motion of a grid of particles
in phase space around a reierenee orbit.
- the geometrical sbape of the central orbit. This sbape bas to be
such tbat the beam is not intercepted by the correction pieces in
the central region. In Fig. (2.13) we give a centralorbit fora
dee-voltage of 36 kV and a high-frequency starting pbase of -45°.
The orbit calculations indicate tbat for this dee-voltage a small
part of the beam may be intercepted.
A disadvantage of the central region geometry as sho~~ in Fig.
(2.10) is tbat it will not be possible to vary the dee-voltage in a
region below 36 kV. Since we do not knowat this moment the maximum
voltage tbat can be hold by the dees, it may turn out tbat the
central region geometry still bas to be changed slightly in the
future.

xlcml
Fig. (2.13): First orbits in ILEC for a high-frequeney starting phase of - 45 degrees and a dee-vol tage of 36 kV. In the reetangular area shown. the electric field as obtained from RELAX3D is used. Outside this area the Gaussian approximation as given in Eqs. (2.2) and (2.3) is used. Also indicated in the figure are tbe positions of the four accelerating gaps.
2.4. Ollculation of extra.cted orbits
For the calculation of orblts that have passed the central
region a self-wri tten program named EXTRACfiON bas been used. The
program EXTRACfiON integrates the equations of motion in polar
eoordinates for a partiele wi th constant energy. These equations are
tbe same as used in the program SEO (see section (2.2)) and may be
found in Ref. (34). The influence of the ver ti cal motion on the
horizontal motion bas been negleeteel and the vertical motion bas been
linearized. The acceleration process is s1mulated by a stepwise
inerease of the partiele momentum P 0
at every passage of an
aceelerat1ng gap. The electric field in the extractor is simulated
by a sudden drop in the magnette field between tbe entrance and exit
of tbe extractor. The drop in the magnette induetion is given by AB = E /v wbere vis the velocity of the.particle and E the electrie ex ex field in the extractor. In ILEC the electrostatic extractor will be
placed at a radius of circa 17 em.
24

When the beam has passed the extractor it enters the fringing
field of the magnet which is characterized by a strong negative
gradient of the magnetic induction in a direction normal to the beam
(see for example Fig. (2.6)). This field shape has a horizontally
defocussing effect on the beam due to the much stronger Lorentz force
that a partiele at the inner side of the beam feels than a partiele
at the outer side of the beam.
The effect is illustrated in Fig. (2.14). This figure gives a plot of
three partiele orbits as calculated with EXTRACTION. The initia!
energy of the particles was 2 MeV. The extractor is placed symmetri
cally with respect to the x-axis and has an ~imuthal width of 40°.
E u
-24 12 24 x(cm)
Fig. (2.14): Shape of an extracted beam which enters into the fringing field of the magnet. The figure illustrates the horizontally defocussing action of the fringing field (compare with Fig. (2.16)).
25

The ligure clearly shows the deflection of the orblts when they enter
the extractor. The shape of the deflected referertee orbit was used to
de termine the design curvature of the extractor. As a remark we note
that the straight lines through the eentre in Fig. (2.14) give the
pos i tion of the 2nd harmonie aceeleratins; gaps.
The defocussins; action of the fringinz field bas to be
compensated by some kind of focussins; channel. For ILEC a passive
magnette focussins; channel is used. In tbè most simple design such a
channel consists of three rectangular iron rods which enclose the
extracted beam (see Fig. (2.15)). Due to the external field of the
cyclotron the bars become.magnetized and produce an additional
magnetic field which increases with distance from the cyclotron
centre. The focussins; action of the èhannel is illustrated in Fig.
(2.16). This figure shows the sameorblts as in Fig. (2.14) except
for the focussing channel which is placed in the upper dee.
north pote tNI
»~'*''»'-''»'»~~~~4 ; '·.:. ~. ,.
. · :,,: 1 Bext · .. ·s cyclotron s ~ N . median
~-~·~~--~~:-- ~ ,, ....
l Bext '"'7h""rh.,.,y;""'rh"0.,.,~h..,.rh"0-r~h"0.,.,~...-;""'%.,.,~/,"""~.,.,~h""'rh.,..,7.;..,./'~.,.,.
south pote IS)
Fig. (2.15): SChematic representation of a passive magnette focussin& channel. The magnette field produeed by the bars bas a post tive gradient in the outward direction normal to the beam.
If the iron bars are saturated the magnette field created by
the channel can be calculated analytically. In case of saturation the
bars are uniformly magnettzed in th~vertical direction. Their effect
can then be treated like that of two recta.ngUlar uniform surface
26

L
12
E u Ot---+-+
-12
-24 24
Fig. (2.16): Shape of the extracted beam after passage through the magnetic focussing channel (compare with Fig. (2.14)}
distributions.of "magnetic charge" at the upper and lower surface of
the bar. The field produced by such a surface distribution may be
found for example in Ref. (40). With the program CHANNEL we calculate
the magnetic field in the median plar1e produced by the magnetic
focussing channel under the assumption of uniform magnetized bars.
The results are stored in a file read by EXTRACTION. Also the field
outside the channel is calculated because this perturbation may
disturb the inner orbits in the cyclotron. In Fig. (2.17) we give an
example of the calculated magnetic field and its gradient as produced
by the focussing channel. The figure also shows a vertical cross
sectien through the channel. In order to obtain an approximately
constant gradient at the position of the beam, the iron bars above
and below the median plane were arranged and slanted as shown in
Fig. (2.17).
27

xltml
I I I
0 O.S 1.0 1.S 2.0 2.!i x(cm)
Fig. (2.17): Analytically calculated magnetic field and its gradient as produced by a passive magnetic focussing channel. Tbe figure also shows a vertical cross-section through the c~l.
28

With the programs CENTRUM and EXTRACTION we can also calculate
the acceptance of the cyclotron, i.e. the maximum area in the phase
space that can pass the cyclotron from injection to extraction
so
:;:; ro 0 '-
..§ 'N
-50
so
=a ro '-..§ 0 ·.,.
-so
z (mm]
Fig. (2.18}: Vertical acceptance of ILEC as calculated with the orbit integration programs CENTRUM and EXTRACTION. The upper figure gives the acceptance of the first three turns. The lower figure gives the acceptance up to extraction. The particles were started at 25 keV (r = 1.6 cm and 90 degrees angular position) with a RF-phase of - 30 degrees. The electric fields in the centre were calculated with RELAX3D.
29

without being intercepted. The horizontal acceptance will be
determined ma.inly by diaphragms which wi 11 be placed in the centre of
the cyclotron in order to 'prevent a bad horizontal beam quali ty. For
the caleulation of the vertical aceeptance, the vertical aperture of
the cyclotron is assumed to consist of a series of vertical
diaphragms positioneel along the beam. To each pair of diaphragms
corresponds a parallelogram in phase space. Since the equations for
the ver ti cal motion are linear, these parallelogra.ms in phase space
can be transformed back to the starting pos i ti on of the orbi t by
using matrix multiplication. In Fig. (2.1Sa) we give as an example
the aceeptance of the central region (first three orbi ts). The
particles were starteel with an initia! energy of 25 keV (r = 1.6 cm,
9 = 90°, i.e. in the middle of the dee aîter the first gap crossing)
and a high frequency pbase of - 30°. The eleetric fields needed in
CENTRUM were calculated with RELAX3D. Figure (2.18b) gives the
acceptance up to extraction for particles with the sa.me initia!
condi tions as in Fig. (2.1Sa). The area in phase space is approxi
ma.tely equal to 650 mmmrad (at 25 keV; a: 60 mmmrad at 3 MeV). A
comparison of both figures shows tbat the vertical acceptance is
determined ma.inly in the central region.
30

3. THEORY OF Aa:E..ERATED ORBlTS IN AN AVF CïaDT'ROO
3.1. Introduetion
Orbit calculations form an important part of the design study
of a cyclotron. The question may arise wether for this purpose
analytica! models are really necessary since, with the present status
of computers, a thorough investigation of the partiele motion can be
made by numerical calculations. In fact numerical calculations always
have to be carried out when high accuracy is needed (for instanee for
isochronism) or when the magnetic or electric fields are strongly
non-linear as is usually the case in the centre of the cyclotron and
in the region of extracted orbits. In such situations an analytica!
model may not give the desired accuracy because of simplifications
which usually have to be made in the derfvation of the theory.
However, one of the difficulties encountered in numerical studies is
that rather often no clear insight in the interesting parameters can
be obtained from the large amount of numerical data. In these cases
analytica! models can be helpful to obtain a general insight into the
problem. It is not so much the aim of an analytica! model to replace
the numerical calculations. They may be used, however. to study
systematically the influence of various cyclotron parameters on the
orbit behaviour and furthermore as m1 eXPedient to facilitate the
interpretation of the numerical results or as a means to check
complicated numerical programs.
The Hamilton formalism provides an appropriate tool to study
partiele orbits in a circular accelerator such as the cyclotron. It
gives a general point of view as well as the possibility of detailed
descriptions. In the Hamilton formalism canonical transformations
need not to be doneon the equations of motion but on the Hamiltonian
itself. This can simplify the derfvation considerably. An additional
advantage is that the shape of the Hamil tonian often indicates what
kind of transformations may be useful.
Apart from the vertical electric focussing action at a dee gap
during the first few turns the acceleration process mainly influences
the horizontal motion of the particles. For this reason we restriet
ourselves in this chapter to the motion in the median plane of the
cyclotron, i.e. we ignore the vertical motion of the particles. This
31

is allowed if we assume that the median plane is a synnetry plane and
if the vertical motion is stable. The vertical electrie focussing may
be studled separately ~ repreaenting the focussing properties of a
deeldummy-dee configuration in terms of ver ti cal lenses (Ref. 41).
3.1.1. Representation of the partiele motion
The main resul t to be derived in this chapter is a Hamil tonian
which determines the time evolution of four canonical variables with
a distinct physical meanir.g namely the energy and phase of the
partiele (for the longitudinal motion} and the position eoordinates
of the orbit centre (for the radial motion). In order to illustrate
this representation of the motion we consider for the moment a
non-accelerated partiele in a homogeneaus me~etie field. In this
. simple case the partiele carrtes out a ctrcular motten. Fig. (3.1)
shows the coordinates of interest: the eentre coordinates x and y c c
and the eirele coordinates xei and Yei·
'Ypos I l
... X pos
Fig. 3.1: The motion of a partiele in a homogeneaus magnette field can be presented ~a circle motion (xci'Yct> and a centre
32
motion. The figure shows the meaning of the canonical variables y, P , E and +.
y '

The non-relativistic Hamiltonian for the motion in the median plane
is given in cartesian coordinates as (we follow for the moment the
metbod of Schulte 13) and therefore use a right-handed coordinate
system. The partiele then moves clock-wise. Later on we will use a
left-handed polar coordinate system. The partiele then moves in the
direction of increasir~ azimuth e):
1 1 2 1 1 2 H = - {P + - qB y) + - {P - - qB x) 2m
0 x 2 o 2m
0 y 2 o (3.1}
where m0
is the rest mass and q the charge of the particle, B0
is the
value of the magnetic induction, x and y are the position coordinates
P the components of the canonical momenturn vector. and Px' We make
y - - -a transformation to new canonical variables x, Px' y and Py
with x, P representing the circle motion and y,P representing the x y coordinates of the orbit centre. This transformation is defined as:
2P 2P =~{x- -i'-> 1 x x =X ei y = yc = 2 (y- B)
q 0 q 0
2P 2P {3.2)
p = y i 1 x p =~{x+ -i'-> = 2 {y + B-) =X x c q 0 y c q 0
The equations of motion for x, Px' y and Py can be derived from a new
Hamiltonian H defined as:
- H qBo _2 _2
H = B = 2m (Px + x. ) q 0 0
{3.3)
The canonical variables y and P do not occur anymore in the - y
Hamiltonian H {cyclic variables} and therefore are constants of
motion. This agrees with the observation that in a homogeneaus
magnetic field the orbit centre is fixed. The remaining Hamiltonian
for the circular motion Eq. (3.3} describes a harmonie oscillator.
The solution of such a motion can be conveniently described in terros
of action-angle variables E and f as:
x =~cos {f - w t) 0
{3.4)
where w0= qB
0/m
0 is the angular revolution frequency of the partiele
33

From Eqs. (3.3) and (3.4) it follows tbat E is proportional to the
value of the original Hamiltonian (E = Hlm0~!> and therefore is a
measure for tbe kinetic energy of the particle. The canonical
conjugate of E. the angle-variable +. gives the angular position of
the partiele on the circle. It is measured with respect to a vector
which rotates with the frequency ~012r around tbe orbit centre
(x0
,y0). This rotating vector can be considered as if it represents
the accelerating voltage which oscillates with the RF frequency
oo /2Tr (where h is the harmonie number of the acceleration mode and 0 .
where perfect isochronism is assumed).The quantity h+ thus gives the
phase of the partiele with respect to the maximum of the accelerating
voltage and it determines the·energy gain per revolution. In Ref.
(13) the quantity -h+. bas been introduced as the central position
phase +ep of the particle. (The minus sign is tncluded in order to
assure tha.t particles which arrive too late at a gap have a negative
phase.)
The representation of the motion in terms of the orbit centre
coordinates, energy and pha.se is illustrated in Fig. (3.1). We note
that there is a direct relation between the motion of the orbit
centre and the radial motion of the partiele around the equilibrium
orbit. This is shown in Fig. (3.2) for. tbe motion in a homogeneaus
magnette field. From this figure we find in linear approximation the
following relations between the centre coordinates and the radial
variables f and Pf:
(3.5}
where r0
= ..f2E is the radius of the equilibrium orbit. f the
deviation of the partiele with respect to the equilibrium orbit and
Pf the angle of the partiele orbit with respect to the equilibrium
orbit.
3.1..2. Survey of this cbapter
For the motion of a non-accelerated partiele in a homogeneaus
magnette field the representation as given in Fig. (3.1} is more or
less. trivia!. It turns out. however, tbat this representation is very
useful also for accelerated particles in an azimuthally varying
34

tYpos
- Xpos
Fig. {3.2): Partiele orbit with respect to the equilibrium orbit in a homogeneaus magnetic field. The figure shows the representation of the radial motion by the radial variables (f,Pf) and the related position coordinates of the orbit centre.
complicated case the main difficulty is to define the position
coordinates of the orbit centre appropriately. Since these coordi
nates have to represent the radial motion around the equilibrium
orbit, the definition must be such that the coordinates of the orbit
centre vanish if the partiele moves on the equilibrium orbit.
Consiclering the situatio~ in a homogeneaus magnetic field it may be
suggested that the momentary position of the centre of curvature of
the orbit provides a useful definition of the orbit centre. However,
in an azimuthally varying magnetic field this motion is very
complicated. Moreover, the centre of curvature of the equilibrium
orbit ltself does not coincide with the cyclotron centre.
The shape of the Hamiltonian provides an adequate method to define
the orbit centre. The radial canonical variables (or centre
coordinates) describe free oscillations around the equilibrium orbit.
Therefore the final shape must be such that the linear part (in the
radial variables or centre coordinates) of the Hamiltonian is equal
to zero. With this condition satisfied, x = y = 0 is a solution of . c c the problem and this solution represents the motion on the equili-
35

brium orbit. Therefore, in the derivation of the theory presented in
this chapter, first of all some canonical transformations will be
applied which remove the linear part of the Hamil tonian. A second
requirement for the definition of the orbit eentre is that its
position varies only slowly with time as eompared to the main oscil
lations of the transverse partiele motion around the equilibrium
orbit. Tberefore also some canonical transformations will be applied
whieh remove all the fast oscillating terms in the Hamiltonian.
Physically this means that the complicated motion of the momentary
eentre of curvature of the partiele orbit is eliminated (smoothing
procedure). The orbit eentre defined in this way may therefore be
considered as the averaged pos i tion of the eentre of curvature.
Tbe procedure as outlined above bas been worked out in detail
for the non-relativistic motion oi an accelerated partiele in a
cylindrically symmetrie magnette iield (classical cyclotron) by Schul te and Ragedoorn 13- 15). They start the der i vation wi th the
Hamiltonian in cartesian coordinates (similar to that given in Eq.
(3.1)) and first of all apply the transformation defined in Eqs.
(3.2). In most important order this transformation already gives the
destred representation of the motion in terms of the orbit eentre and
the circle motion. Subsequently, the radius dependent part of the
magnette field and the acceleration effects are corrected for by some
additional canonical transiormations which lead to the proper defini-
. tion of the orbtt eentre. For an aztmuthally varying magnetic field
the derfvation turns out to become very tedious however, due to the
complicated representation of the magnette field. We avoid this
difficulty by using polar instead of cartesfan coordinates.
Tbe final HamU tonian to be derived in this ehapter contains
only slowly varying terms so that the equations of motion can be
tntegrated with a large integration step. The Hamiltonian basicly
consists of three main parts.
The first part eontains only magnette field quantities and it
descrtbes, if the other two matn parts are put to zero, the motion of
a non-accelerated partiele in an azimuthally varying magnette field.
This Hamiltonian will be derived in section (3.3). The treatment used
is a generalization of the theory developed in Ref. {12) sueh
that aceeleration can be taken into account in a conventent manner.
36

With some canonical transformations the linear part of the
Hamiltonian and the fast oscillating terms are removed. These trans
formations bring the first main part of the Hamiltonian to the
destred final shape and also determine the relations between the
position eoordinates of the partiele and the canonical variables. The
Hamiltonian can be used to study isochronism, the linéar radial
betatron oscillations and the non-linear character and stability of
the radial motion. Usually the magnette field quantities, like the
shape of the average field and the Fourier components of the flutter
profile, are obtained from measurements. In some cases however, it
may be useful to give in these quantities by hand, for instanee if
one wants to evaluate in first order the properties of a hypothetical
cyclotron.
The second main part of the Hamiltoniw1 contains the electrie
field quantities (like the amplitude of the accelerating voltage, the
harmonie mode number of the acceleration, the spiral angle of the
dees and the Fourier components of the spattal part of the
accelerating voltage) but not the Fourier components of the magnette
field. Together with the first part it describes the motion of an
accelerated partiele in an AYF cyclotron, but with the restrietion
that effects due to interfering influences of the geometrical shape
of the dees and the azimuthally varying part of the magnette field
are ignored.
This Hamiltonian will be derived in section {3.4). In the relations
for the position coordinates as obtained in section (3.3) we ignore
for the time being the magnette field flutter and substitute these
relations in the electric potenttal function representing the
acceleration. After expansion of the electric potentlal function with
respect to the centre coordinates a new linear part appears in het
Hamiltonian and also new oscillating terms. By appropriate canonical
transformations these terms are again removed and the final shape of
the second main part of the Hamiltonian is obtained. The Hamiltonian
can be used to study simultaneously the coupled longitudinal and
transverse motion and how these motions are influenced by a given
geometrical shape of the dee system. Due to the Fourier represen
tation of the acealerating voltage, the Hamiltonian can be applied to
most practical dee systems. The Fourier components may be obtained
from electric field measurements or alternatively from computer
37

programs which solve the Laplace equation with given boundary
condi ti ons. In practice i t is very convenient to assume an idealized
spatial distributton or the accelerating voltage ror which the
Fourier analysis can be made analytically. Some examples or this will
be given in the next section or this chapter.
The third main part or the Hamiltonian contains the electric
field quantities as well as the Fourier components or the magnetic
field. This Hamiltonian will be derived in section (3.5}. Combined
with the first two parts it describes resonances resulting rrom
interference between the dee system and the magnette flutter profile.
One example or this is the electric gap crossing resonance 2S} which
arrects the coordinates or the orbit centre in a way comparable with
the inrluence of a first harmonie magnetic field error. We find that
ror certain combinations or the magnetic field symmetry number and
the number or dees another term may be present in the Hamiltonian
which affects the energy and central position phase or the particle.
In section (3.2} we first or all define the magnetic field
shape in the median plane, the potentlal runction ror the
accelerating electric field and the relativistic Hamiltonian in polar
coordinates used as the starting point for the analysis.
3.2. The basic Hamiltonian
A general relativistic Hamiltonian ror the accelerated motion
or a partiele in the median plane or the cyclotron can be represented
in polar coordinates as:
_2 2 2 Pa 2 2 ~ H = [~ + (Pr- qAr} c + (-r- qAa} c] + qV(r,a}sin (~t} (3.6}
where rand a are the polar coordinates or the partiele , Pr and Pa
the corresponding components or the canonical momenturn vector and t
the independent variabie time, Ar and Aa the components or the
magnetic vector potential, V(r,a} the spatial part or the
accelerating voltage in the median plane, ~ the angular RF
rrequency and E = m c2 the rest energy or the particle, m the rest 0 0 0
mass and q the charge or the partiele and c the velocity or light.
The classica! Hamiltonian ror the non-accelerated motion or the
partiele is defined as:
1 2 1 Pa 2 Hel = 2m (P r - qAr} + 2m <-r- qAa}
0 0
38
(3.7}

With this representation the Hamiltonian in Eq. (3.6) can be written
in a somewhat more simple form as:
~ H = E {1 + 2H 1/E ) + qV(r.e) sin (wRFt) 0 c 0
(3.8)
3.2.1. Representation of the magnetic field
The components of the vector potential Ar and A9 have to be
calculated from the magnetic field in the median plane B(r,9). We
split B(r,9} in an average field B(r) and a flutter profile f(r,e),
expand f{r.e) in a Fourier series and split the average field B{r) in
a constant part B0
and a radius dependent part ~(r):
B(r.e) = B(r) (1 + f(r,9))
f(r,9) = ! [An(r}cosne + Bn(r)sinn9] n
B(r) = B (1 + ~(r)) 0
(3.9)
{3.10)
(3.11)
We assume that the magnetic field bas perfect S-fold rotational
symmetry (S ~ 3) with respect to the vertical axis through the centre
of the cyclotron, i.e. we do not consider the influence of harmonie
magnetic field errors in this chapter. In this case only terms with n
= kS, k = 1,2,3, ••. will be present in Eq. (3.10).
Wedefine the constant part B in Eq. {3.11) such that in a non-relao tivistic approximation the motion in a homogeneaus magnetic field B
0
would be isochronous. This gives for B : 0
(3.12)
where h is the mode number of the acceleration.
We define the polar coordinates such that r,9,z give in this sequence
a left-handed system. Then, a positively charged partiele moves in
the direction of increasing 9 when the magnetic field is pointing in
the positive z direction. We include the average magnetic field in
the azimuthal component of the vector potentlal and the flutter
profile in the radial component. A related vector potential for the
median plane magnetic field in the left-handed coordinate system then
becomes:
39

A (r,9) = B r(l + ~(r))F(r,9) r o
where the functions U(r) and F(r,9) are defined as:
U(r) 2 r = 2 f r'~(r'}dr' r o
An(r} Bn(r) F(r,9) =I [ -- sinn9- -- cosn9] n n n
3.2.2. Representation of the electric field
(3.13)
(3.14)
(3.15)
(3.16}
The spattal part of the accelerating voltage V(r,9) is
periodic in 9 and can be expanded in a Fourier series. For
convenience we only take into account the eosine components, i.e. we
assume that the dee system is symmetrie with respect to the x-axis.
Usually the coordinate system can be chosen such that this condition
is reasonably well satisfied (except for RF systems with spiral dees;
these will be considered further on in this section). Otherwise also
the sine components should be taken into account. The derivation then
becomes somewhat more elaborate but not essentially different. For a
. symmetrie dee system the Fourier representation of the accelerating voltage may be written as:
A CO V V(r,8) = 2 I am(r)cosm9, a-m: = am' m = 0,1,2, ••• {3.17)
m=- co
A
where V is the maximum dee voltage.
The Fourier analysis in Eq. (3.17} can be done analytically if
we assume an idealized distributton of the accelerating voltage. In
Fig. (3.3a) a schematical drawing of the one-dee system is given.
This system is symmetrie with respect to the x-axis. The accelerating
gap lies along the y-axis. If we assume a very small width of the gap
(stepwise acceleration), then the potenttal tunetion V(r,9) may be .... chosen equal to zero for negative x-values and equal to V for
posi tive x-values. This shape is given in Fig. (3.3b) as a tunetion
40

of the azimuth 9. The Fourier coefficients for this idealized one-dee
system become:
2 sinma: am = ::;;-m--
71' a:=2 m = 1,2, ..• (3.18)
where a: = v/2 is the half-dee angle.
a) +Y I
b)
Vlr,B)
~ -~., ·n 01---'-'-1-_LL 9
11.2 lt 3lt 2lt T
Fig. (3.3): a) A schematical drawing of a one-dee system. b) Assuming stepwise acceleration the shape of the aceale
rating voltage may be taken as a block function. The finite width of the gap may he taken into account by replacing the bleek shape by a trapezium-like shape; ~ is the azimuthal extension of the gap.
In order to obtain acceleration with the one-dee system, the mode
number h should be an odd number (h = 1,3,5,7, ... ). For even h the
partiele is alternately accelerated and decelerated at successive gap
crossings. We note that due to our representation of the time
oscillating part of the acealerating voltage by a sine-function (see " Bq. (3.6)), .the amplitude of the dee-voltage V should be taken
negative if h equals 3,7,11, ••• Otherwise the partiele would be
decelerated.
The assumption of stepwise acceleration becomes less accurate for the
first few turns because then, the finite crossing time is more
important. The finite width of the gap may be taken 'into account by
replacing the block shape in Fig. (3.3b} by a trapezium-like shape.
41

In this case the Fourier coefficients become:
= ! sinun sin(mtJ/2) am 11' m mt]/2
11' a= 2• m = 1.2 •••• (3.19)
· where ~ is the azimutbal extension of the gap (see Fig. (3.3b)).
In reality the normal component of the electric field within the gap
can, fora structure as given in Fig. (3.3a), in good approximation
be represented by the Ge.ussian shape as given in Eq. (2.2).
An estimate for the gap-width ~ may be cbtàined from F~. (2.3).
The assumption of stepwise acceleration can also be used for two-dee
and three-dee systems (see Fig. (3..4)) or muiti-dee systems. For the
two-dee system two different cases can be distinguished. The first is
where the two dees oscillate in phase (the push-push mode). In this
case h must be an even number. The other mode of opera ti on is the
push-pull mode where both dees oscillate 180° out of phase, permit
ting only odd harmonie numbers. The Fourier coefficients for the
push-push mode and the push-pull mode become respectively:
a = 0 0
a = 2sinun (l _ (-l}m) m 1I'ID
where a is the half-dee angle.
al
x
(push-push) (3.20)
(push-pull} (3.21}
x
Fig. (3.4): A schematical drawing of a two-dee system (a) and a three-dee system (b): a is the balf-dee angle.
42

For the idealized three-dee system (Fig. (3.4b)) we find the
following Fourier coefficients:
6sil1lllCt a=---m mn
for m 7- 0,3,6,
for m = 3,6,9,
where it is assumed that all three dees oscillate in phase. The
harmonie mode number h should then be equal to h = 3,6,9, •..
(3.22)
So far we only considered dee systems with straight radial
gaps. At present several superconducting cyclotrons are under
construction or have already been realized at different laboratories,
which are equipped with spiral-shaped dees 42- 44>. In Fig. (3.5) such
a geometry is shown schematically for a three-dee system. Here the
spiraling of the dees is represented by the angle ~(r) which gives
the azimuthal position of the mid-dee line as a function of radius.
In order to include in our formalism the effects arising from
spiral-shapeè dees we replace in Eq. (3.17) the azimuth 9 by e-~{r).
Thus, we assume the following distribution of the spatial part of the
accelerating voltage: A IX)
V(r.e) = !2 ~a {r)cosm(e - ~(r)) -co m
(3.23)
For an idealized system the Fourier coefficients may again be calcu
lated analytically. We note that ~is related to the frequently used
spiral angle ~via the relation: rd~/dr = tan~.
y
Fig. (3.5): A schematical drawing of a three-dee system with spiral gaps. The angle ~(r) gives the azimuthal position of the mid-dee line as a function of radius; a is the half-dee angle.
43

3.2.3. Tbe basic Hamiltontan
To normalize the representation given by the Hamiltonian Eq.
(3.6) we divide the momenta by qB end multiply the time with {o) . Tbe 0 2 0
Hamil tonian then bas to he divided by m0
{o)0
• It is conventent to
scale the amplitude of the accelerating voltage end the classica!
Hamiltonian Hel accordingly. Tbe new radial momenturn bas the
dimension meters. Tbe new angular momenturn and the new Hamil tonian
have the dimension meters squared. Tbe new time variabie is
dimensionless and is approximately equal to the azimuthal position of
the particle. Tbe scale transformation is defined by:
t = {,) t 0
with {o)o defined in Eq. (3.12).
(3.24)
We split the Hamiltonian H given in Eq. (3.6) into two parts. The
first part H8
describes the stationary (i.e. time-independent) orbit
behaviour of a non-accelerated partiele and the second part H ac
represents the accelerating voltage. Tbe sum of these two parts then
describes accelerated partiele orbits in en AVF cyclotron. Using the
representation of the fieldsas given in Eqs. (3.13), (3.14) and
(3.23) and applying the sealing of Eqs. (3.24) we obtain for the
Hami 1 tónian:
=ii +ii s ac
• }.: = c/{o) 0
-CIO
iiac = ~-= am (r}cosm(8- +(r))sinht
(3.25)
(3.26)
(3.27)
(3.28)

with the functions U(r) and F(r,e) defined in Eqs. (3.15) and (3.16)
respectively.
The Hamiltonian system of Eqs. (3.25) - (3.28) wil! be used in the
following sections as the starting point for the analysis of
non-accelerated and accelerated partiele orbits in an AVF cyclotron.
3.3. 'Ibe time independent orb i t bebaviour
In this section we consider non-accelerated partiele orbits in
an AVF cyclotron. In the following two sections acceleration will be
incorporated in the analysis. The Hamiltonian for the non-accelerated
motion follows from Eqs. (3.25) - {3.28) by putting V and Hac equal
to zero. Since there is no acceleration, the Hamiltonian does not
depend on time and therefore is a constant of motion. The value of
this constant can be expressed in terms of the scaled kinetic
momenturn of the partiele P = P /qB as: 0 0 0
(3.29}
The motion may now be analyzed by choosing - P9 as the new
Hamiltonian and 9 as the new independent variable. The solution then
describes the geometrical shape of the orbit as a function of 9. The
new Hamiltonian is found by solving P9 algebraically from F.qs.
(3.26), {3.27) and (3.29) and contains P as a free parameter. In 0
this way the number of canonical variables is reduced to two namely r
and P • This approach works very well if one is interested only in r
the radial orbit behaviour with respect to the equilibrium orbit 12)
However, for the incorporation of the acceleration process, which bas
to be described by four canonical variables, this approach is not so
convenient. We derive a more general solution of the non-accelerated
orbit behaviour which includes the radial motion but also the
longitudinal motion (therefore the condition for isochronism follows
directly from the final Hamiltonian to be derived). The derivation is
rather tedious and therefore we only point out the basic steps needed
to obt~in the final result. The details of the derivation are given
in appendix A. As a warning we note that we use the (scaled) time t
as independent variable and not the frequently used azimuth e. Therefore, if our results are to be compared with other treatments
where eis the independent variabie (like for example in Ref. (12)}.
the relation between both variables should be taken into account.
45

3.3.1. The motion lfith respect to the equilibrium orbit
A partiele with constant energy oscillates around the static
equilibrium orbit (SEO). This orbit is defined as a closed orbit in
the median plane with the same S-fold rotational symmetry as the
magneti.c field.
Let us consider for the moment the. motion in a cylindrically
symmetrie magnette field. In this case the SEO will be a circle. The
Ha.miltonian is obtained from Eqs. (3.26) and (3.27) by putting F(r,a).
to zero. This Ha.miltonian does not depend on 9. Therefore, in a
cylindrically symmetrie magnette field Pa is a constant of motion.
For the motion on the equilibrium orbir Pr is equal to zero and the
radius r is a constant which we denote by r0
• We derive the equations
for the radial motion from the Hamiltonian and look for the salution
Pr = 0, r = r0
=constant. This gives the following relation between
the constant of motion Pa and the radius r of the SEO: . 0
(3.30)
The non-relativistic energy of the partiele is equal to the classica!
Ha.miltonian Hel' For the motion on the SEO this quantity is found as a funetion of Pa by substituting Eq. (3.30) in Eq. {3.27}. With Pr = 0 and F(r,9) = 0 we then obtain:
(3.31)
In an AVF cyclotron the quantities ~ and U are usually very small (in
the order of a few percent). It then follows from Eq. (3.31) that the canonical variabie P 9 is approximately equa1 to the (scaled) kinetie
energy of the partiele • We therefore change the symbols and replaee
in Eq. (3.27) Pa by Ë and consider Ë as the "energy variable". The
Ha.miltonian thus becomes:
(3.32)
1- 21Ë 1 2 Hel= 2 [Pr-r(l+~(r)}F(r,e)] + 2 [r+ 2 r(l + U(r))J (3.33)
46

From Eq. (3.30) we have for a homogeneous magnetic field r = (2Ë)*. 0
This agrees with the rep~esentation of the circle motion by action-
angle variables as introduced insection (3.1.1}. Therefore, analo
gous to Eq. (3.30), wedefine a radius r depending on the energy 0
variabie Ë by the implicit relation:
- - * r (E) = (2EI(l +.2 ~(r}- U(r )}] 0 0 0
(3.34)
In a cylindrically symmetrie magnetic field this definition of r 0
gives the radius of the SEO. In an azimuthally varying magnetic field
r will be approximately equal to the average radius of the SEO. 0
Let us now consider the motion around the SEO in an azimu-
thally varying magnetic field. For this purpose we introduce a new
radial coordinate f = r - Re and a new radial canonical momenturn
v = P - P where R is the radius of the SEO and P the radial r e e e canonical momenturn of the SEO. The SEO is no longer a cirele and
therefore R depends not only on r (Ë) but also on the azimuth 9. e o Furthermore the radial canonical momenturn P of the SEO is finite e and depends also on r (Ë) and 9. We write for the equilibrium orbit:
0
R = r (Ë) +x (r ,9), e o e o
P = P (r ,6) e e o (3.35)
where the yet unknown functions x0
and Pe have the dimension of
meters and x0/r
0 and Pe/r
0 are of the same order of magnitude as the
magnetic field flutter f defined in Eq. (3.10). The functions x and e
Pe are periodic in 9 and contain the sameharmonies as the magnetic
field. In order to have a canonical transformation (tof and v) also
the longitudinal variables Ë and e have to be changed slightly. We
choose a generating function which depends on the old momenta P , Ë h r
and the new coordinates f,9. This generating function then becomes:
A A A
G =- Ëe - P (R (r .e) + f} + P (r ,O)f, r e o e o r = r (Ë) 0 0
(3.36)
The new Hamiltonian is found by expressing the old variables r, P , Ë ~ ~ r
and a in terms of the new variables f, '11', E and e (using the gene-
rating function Eq. (3.36}) and inserting these relations in the
47

classica! Hamiltonian Hel given in Eq. (3.33}. It is however not
possible to solve r.P ,Ë and e exactly rrom Eq. (3.36} and thererore r . some kind of approx.ima.tion has to be made. Since we are interesteel
in small deviations of the partiele orbit with respect to the SEO we
expand the classica! Hamiltonian Hel into a power series of f and w. (Remark: It may seem more logtcal to expand the relativistic Hamil
tonian with respect to the radial variables. It turns out however
that this is not necessary. The reason for this is that the SEO and
the fast oscillating terms can be removed without expanding the
. relativistic Hamiltonian, i.e. the orbit centre can be defined
appropriately by just brtnging the classica! Hamiltonian to the
correct final shape. It should be remembered however. that the
equations of motion follow from the relativistic Hamiltonian Eq.
(3.32} with the expression for H01 substituted in this equation.} We
take into account terms up to fourth degree in f and wand write for
Hel:
(3.37}
where Ha is independent of E and v, H1 is linear in f and v etc.
The expansion coefficients in each trem depend on the longitudinal A A
variables E and 9 and moreover contain the magnette field quantities
~. An and Bn as defined in Eqs. (3.9) - (3.11). In an AVF cyclotron
the Fourier components An,Bn are usually much smaller than unity
(typically about 0.25). The problem could thus be approxima.ted by
taking into account terms up to first order in An and Bn and by
neglecting higher order terms, i.e. a first order approxima.tion in
the magnette field flutter f. This would however be a too rough
approximation. The reason for this is that in the final result to be
derived, the first significant terms in H0 and ~ are of the order r2
and in Ha and H4 of the order f. Thus, with a first order approxi
ma.tion we would not find any diEferenee in H0 and ~ as compared to
the results one would obtain for the cylindrically symmetrie magnette
field. Therefore, in order to obtain the desired results, we have to
keep terms in H0 • H1 and ~up to second order and terms in Ha and H4 up to first order in the flutter. (Remark: it may seem that, for
these approximations to be accurate, we have to assume that the
48

Fourier components An and Bn are small. However, a better criterion
is that the quantity x /r is small. Further on we show that x /r is e o · e o of the order A /s2, B /S2 where S is the symmetry number of the n n magnetic field (S ~ 3). Therefore, in order that the approximations
used give accurate results, we have to assume that A /S2 and B /s2 n n
are much smaller than unity. The values of these quantities typically
amount a few percent). The expansion coefficients in Eq. {3.37) also
contain derivatives of the function ~(r) with respect to radius. In
the derivation we assume that the quantity r~dr is of the same
order of magnitude as the flutter squared. For an isochronous cyclo
tron with stable vertical motion this is indeed the case. Higher
derivaties of ~are assumed to be of first order in the flutter.
Moreover, cross terros between derivatives of ~ and the Fourier
components A , B will be neglected. Finally we note that the n n A
expansion coefficients in Eq. (3.37) are periodic in 9 and thus can A
be split into a constant part (average value independent of 9) and an
oscillating part with an average value equal to zero. In the
derivation we can neglect oscillating terros in H0 , H1 and H2 which
are of second order in the flutter. The reason for this is that
within our approximations, these terros do not influence the final
result to be derived. This may become more clear later on when we
remave the oscillating terros from the Hamiltonian.
Using the approximations outlined above, the relations between
the old and new variables can be calculated and the expansion of the
Hamil tonian Eq. (3.37) can be made. The functions x and P defined e e
in Eq. (3.35) follow from the requirement that H1 has to vanish. We
note that in this case also the linear part of the relativistic
Hamiltonian is equal to zero so that the variables f and v describe
free oscillations around the SEO. By putting H1 to zero we obtain two
differential equations for xe and Pe. The periodic solution of these
equations gives xe and Pe. In the present approximation w~ findAfor
xe and Pe as functions of the new longitudinal variables E and 9
(some details of the derivation are given in appendix A.l):
49

_ _ ~ A Bn A
Xe = "t + :I ( ""2 cosn9 + ""2 sinn9] n n -1 n -1
-A B P == r (l+J,t)P • P = 6+:I ( 2n stnnê + ~ cosnê] e 0 e e n n(n -1) n(n -1)
_ 1 (2n2-5)(A2n + B2n} A A' + B B' -r = - 2 {![ 2 2 + n n 2 n n ]}
n 2(n -1} n - 1
A'B- AB' 6 =! n n
2n n
n 2n(n -1)
(3.38}
(3.39)
(3.40}
(3.41}
As a remark we note that x defined in Eq. (3.38) is not exactly . e equal to the SEO. The SEO is found from Eq. (A. 7) by putting f and ,.. .". to zero. As a lunetion of the new energy variabie E and the real
azimuth 9 we obtain from Eqs. (A.7) and (A.9):
Re(Ê,e) = r0
{1 + -r + ![ ~n cosna + :n sinn9]} n n -1 n -1
A2 + B2 - n n
-r=-r-! 2 2 n (n -1)
with 7 defined in Eq. {3.40).
As a second remark we note that we find a different expression for -r
as compared to the result given in Ref. (12}. The reason for this is that our definition of the radius r deviates from the definition
0
given in Ref. {12). In Ref. {12) the radius is defined with the *-" * equation P
0 = qr
0B(r
0) where P
0 is the kinetic momentum of the
particle. The (scaled) kinetic momentum of a ·particle is equal to
P = (2ii 1 }'/z. For a partiele moving on the SEO this equation becomes: _o _c Yz _ P
0 = {2H
0) • By using the expression for HO as given in Eq. (A.17) we
find for P : P = r {l+J.t)(l + -41
Y. (A2+B2)/(n2-t)). Thus we obtain for · o o o * ft n n
the·relation between r0
and r0
:
50

r 0
* where r corresponds with the definition given in Ref. (12). 0
Substitution of this relation in the equation for R gives a new e expression for ~ namely:
A2 + B2 A2 + B2 _'<"n n_'<"n n . ... 2 2 ... 2
n (n -1} n 4(n -1}
* This expression for ~ agrees with the result given in Ref. (12).
As a third remark we note tbat we find a difference also in the
expression for P Eq. (3.39). The reason for this is tbat in Ref. e
(12) the radial component of the magnette vector potenttal was chose
equal to zero. Therefore there is a difference with regard to the
meaning of the radial canonical momentum. In Ref. (12} it equals the·
radial kinetic momentum. If we calculate from Eqs. (3.39) and (3.13)
the radial kinetic momenturn on the SEO {equal to P - qA ) we find e r the same expressionasin Ref. (12).
3.3.2. Definition of the orbit centre
The new Hamiltonian which describes the radial motion with
respect to the SEO (see appendix A.l} still bas a complicated shape "' due to the oscillating bebaviour (9 - dependence) of the expansion
coefficients. In appendix A.2 the fast oscillating terms (i.e. terms
which vary with a frequency comparable with the revolution frequency)
are removed from the Hamiltonian by an appropriate canonical
transforrnation. In this respect it bas to be realized tbat the radial
motion itself is a fast oscillating motion, i.e. the solutions for v
and f also contain fast oscillating terms wbich may interfere with ~
the 9-dependent coefficients in the Hamiltonian to give on the
average a slowly varying term. A first order solution for E and v can
be obtained if we ignore the non-linear cbaracter of the motion
(~ = il4 = 0) and also ter~s tbat are of first or second order in the
flutter. As a function of 9 this first order solution becomes:
51

(3.42)
(3.43)
wbere f0
and 90
are integration constànts.
The solution for tbe radial motion is more complicated tban tbis
· first order solution. In dealing wi tb tbat more complicated motion i t
is profitable to represent tbe radial motion by action-angle
variables (I,cp) in a radial phase plane that rotates with unit
frequency. In accordance with Eqs. (3.42) and (3.43) we write for
tbis transformation:
~ ,. f = (21/(1 + ~}) cos (cp - 9) (3.44)
. ~ ,. v = (21 (1 + ~)) sin (cp- 9) (3.45)
Witb tbis definition the oscillating parts of the new variables I,cp
will be small. In order to have a canonical transformation from (f,v) A A
to (I,cp} the longitudinal variables (E,9) also have to be changed
slightly. For tbe transformation to tbe new variabie (I,cp.E,a) we
again choose a generating function which depends on tbe old momenta A ~
('r.E) and tbe new coordinates (1,9). The generating function then
becomes:
"' - ~ V 2~ G = -(I+E) 9-I arcsin[v/(21{1~)) ]- 2(1 + ~) {21(1+~)-v ) (3.46)
In appendix A.2 we calculate tbe relations between tbe old and new
variables and also tbe new Ham i 1 tonian. The shape of tbis new
Hamil tonian is sucb that all oscillating terms can be transformed to
bigher order in tbe flutter. Within our approximations tbe
oscillating parts of these new terms of bigher order can be
neglected. The osctllating terms are removed witb a final canonical . . . . transformation to new variables (I ,cp,E, 9 ) , using a procedure whicb
is more or less similar to that given in Ref. {12). Tbe differenee
is, however tbat our Hamiltonian depends on four instead of two
canonical variables. We need tbe relations between tbe position
coordinates of the partiele and the final canonical variables and
52

therefore we have to carry out also this final canonical
trans-formation in detail. This will be done in appendix A.2. Befare
writing down the final Hamiltonian, we express the action-angle .. . variables I and ~ in cartesian coordinates as:
r. . x = ~2! cos "' c
r. .. y = ~2I sin 'I c
(3.47}
{3.48)
Further on in section 3.3.3 we show that xc and yc repreaent the
position coordinates of the orbit centre. The final Hamiltonian Ü5
becomes:
with Hel given by:
3 2 . 3 2 D1(x - 3x y ) - n2 (y - 3x y ) + c cc c cc
24r3
(1 + J.l)312
0
2 22 4 22 4 3 3 E (x + y ) + E1(x - 6x y + y ) + 4E2(x y - y x ) + o c c c cc c cc cc]
32r4 (1 + J.l)2
E = (J.l" + J.l"'}/(1 + J.l) 0
E - §. A' + ;! A" + 1 A'" 1- 2 4 2 4 6 4
0
E 5 B' + ;! B" + 1 B "' 2=24 24 64
(3.49)
{3.50)
(3.52)
(3.53)
(3.54)
53

We note that we find sligbtly different expresslons for E1 and E2 as
. compared to the results given in Ref. (12). This is due toa small
error made in Ref. (12).
The Hamiltonian given in Eqs. (3.49) and (3.50) describes the
coordinates of the orbit centre x ,y and the longitudinal variables • • c c E, a of a non-aeeelerated partiele in an azimuthally varying magnet ie
field. The radius r0
in the Hamilt~ian bas to be considered as a lunetion oF the canonical momentum E according to Eq. (3.34). All - . field quantities in H01 have to be evaluated at radius r = r 0(E).The
Hamiltonian does not depend on time t and therefore is a constant of . mot ion. Moreover, the final Hamil tonian does not depend on e so that • E is a constant of motion also. The quantity vr gives the number of
radial betatron oseillations per revolution (the radial betatron
tune). In Fig. (3.6) we oompare the values of v as calculated r
analytically from Eq. (3.51) with results obtained by numerical
integration of the partiele motion in the ILEC magnette field (see also Fig. {2.8)).
The Hamiltonian Eqs. (3.49) and (3.50} can also be used to calculate
the isoehronous shape of the average magnette field. The magnette field is isoehronous if for all values of r
0 the quantity
1 2'1" o_ f (dS/dt}dt equals unity if the partiele moves on the equili-~u 0 • brium orbit (x = y = 0). From the relation between 9 and a it
e 0 • fellows that this is equivalent with d9/dt = 1. From the Hamiltonian
• equation for 9 we obtatn:
de.. 8ii 8ii dr -=_!,=_!,....!!.,= 1 .
8E Br • odE
with x = y • 0 e 0 (3.55)
By using Eqs. (3.11), (3.34), (3.49), (3.50) and (3.55) we find for
the isochronous magnette field shape:
A2+B2 +A A'+ BB' 2 B (r} = B [1 - I n n n n n n] (1 - _!_)~
tso o n 2(n2-l) )...2 (3.56)
where we negleoted some flutter terms under the square root as these
terms give a correction of fourth order in the flutter. In Fig. (3.7} we give the deviation between.the measured average magnette field of
ILEC and its ideal isochronous shape calculated with Eq. (3.56). (See
54

-I '>
+
anal.l s smeasured num./ anal.l - -
B • Biso num./
r !cml
Fig. (3.6}: Comparison between the analytically and numerically calculated radial osicllation frequency of the ILEC magnetic field. The analytica! values were obtained from Eq. (3.51): the numerical values from an orbit integration program. The drawn curve corresponds with the measured average magnetic field. For the dotted curve the average field is assumed to be perfectly isochronous.
also Fig. {2.6)). The equations of on for the orbit centre follow
from:
dy öH c s -=-éJx dt c
(3.57)
The phase-space trajectories for the orbit centre are lines Hs is
constant (note that this is equivalent with Hel is constant). In Fig.
(3.8) an orbit centre phase plot is given for particles with an
energy of 2 MeV {r = 14.3 cm) moving in the ILEC magnetic field. The 0
figure was obtained by numerical integration of Eqs. (3.57). For
55

0
_,il""~ + • I +, , ' .
4- +
--·- anal yt!cal + numerical
• • . I • :1' ---t-----+. --~----+~-
' \+~ ........ ·* t "'+*~ • ' I
I I
+ . . I ,
J. , +
rlcml
Fig. (3.7): The deviation between the measured average magnette field of.ILEC and its ideal isochronous shape. The dasbed curve gives the analytica! resul t obtained with Eq. {3.56). The crosses give the numerically calculated values.
For small radial amplitudes tbe trajectories· are circles as deter
mined by tbe quadratic term in Eq. (3.50). With increasing amplitude
tbe fourth degree term in Eq. (3.50) becomes more important (note
that for ILEC D1 = D2 = E2 = 0) and the circles start to deform
slightly. At still bigher amplitudes the radial motion becomes
unstable. The maximum stabie amplitude is equal to the radial
leclmml
Fig. (3.8): ~;i~m)e~!r~h~~~P!::n!~~c~~!i~~e~~rrÎo:~in~~o = follow from numerical integration of Eqs. (3.57).
56

position of the four saddle points {unstable fixed points).
The line H is constant through these points is called the s separatrix as it separates the stabie from the unstable region.
The position of the saddle points may be calculated analytically
from aH ;ax = aH 1ay = o. s c s c
4.0.----------"""T~-----------, x analytica! + numerical
Ê e 2.0 1- -~
0 3.0 6.0 Xe (mm)
Fig. {3.9): Orbit centre motion fora partiele of 200 keV {r = 4.3 cm) in the ILEC magnetic field. 0
For the analytica! calculation we used the expression for E1 as given in Ref. {12): n = turnnumber.
4.0.-------------r------------,
Ê e 2.0 ~
0
x analytica! + numerical
xc lmmJ
6.0
Fig. (3.10): Orbit centre motion as in Fig. {3.9) but the analytica! calculation done with the corrected expression for E1 as given in Eq. (3.54): n = turnnumber.
57

In Fig. (3.9) we campare the orbit centre motion for a partiele with
E = 200 keV (r0
= 4.3 cm) in the ILEC magnette field as calculated by
a numerical orb i t integration program wi th the ana.lytical resul ts
obtained from Eqs. (3.57). Each point in this figure corresponds with
one revolution of the particle. For the analytica! caleulation in
Fig. {3.9) we used the expression for E1 as given in Ref. (12). In
Fig. (3.10) we give the results obtained with the corrected
expression for E1 Eq. (3.54).
3.3.3. The posi tion of the partiele in terms of the canonical
variables
For the analysis of the acceleration process in sections (3.4)
and (3.5) weneed the relations between the position eoordinates of = =
the partiele r,9 and the final canonical variables E,9,x and y • e c
These relations are determined by the transformations suecessively
applied on the Hamiltonian for the stationary motion Hs. i.e. the
transformation to the radial variables f,v defined by Eq. (3.36),the
transformation to action-angle variables Eq. (3.46), the transfor
mation by whieh the oseillating terros were removed Eq. (A.32) and the
transformation to cartesian coordinates for the orbit centre Eqs.
{3.47) and (3.48). The relations for r and 9 can be written as:
r = r{o) + Ar 9 = e(o) + A9 (3.58)
where r(o) and e(o) contain terros which do not depend on the Fourier
components A ,B and Ar and A9 contain all extra terms resulting from n n the azimuthally varying part of the magnette field. In the analysis
of the acceleration process we will restriet ourselves to the linear
motion with respect to the equilibrium orbit. i.e. we will ignore the
non-linear character of this motion. In this approximation we have to
calculate rand 9 up to second degree in xc and y0
• As regards the
interterenee between the dee-structure and the flutter profile of the
magnetic field we will study the significant effects in most impor
tant order. These are already found 1f we calculate Ar and 49 up to
first order in the flutter and up to first degree in x0
and y0
• Thus, we calculate r(o) and a(o) up to seeond degree in xe' y
0 and Ar and
49 up to first degree and first order. Some details of the calcu
lation are given in appendix A.3. We find the following result:
58

() • A AB e 0 = e + 2 - 4 + (3.60) r r
0 0
fn f 2f' 2f + f' Ar=ro::Z[-2-+(2 ~ + 2 ~ 1\+ n2 nB2+ .... ] (3.61)
n n -1 n (n -1) n (n -4) r0
n- 4 r0
fn !9 =l 2 2
n (n -1)
2f 3f' A (n2+2)(2f +f') B n n n n
-(-2-- + 2 2 )2 + 2 2 2 2 +.(3 ·62} n - 4 (n -1)(n -4) r n (n -1)(n -4} r
0 0
where A, B, fn and fn are defined as:
(3.63)
{3.64)
= = fn = Ancosne + Bnsinn9 (3.65}
"' . fn = -nA sinn9 + nB cosne n n (3.66)
Let us finally consider the meaning of the canonical variables. If we
assume that x and y as well as f are small quantities then c c n we obtain in most important order the following expressions for the
cartesian coordinates of the particle:
= {1 + ~>~ x + R (a + óa) xpos c e cos =
(e + óe)
~ = = y = (1 + ~) y .+ R (9 + 69) sin (9 + 69) pos c e
• 2 2 where Re is the radius of the SEO and ó9 =:! fn'{n (n -1)).
n
(3.67)
(3.69)
59

From these equations it follows that x and y (or more accurately ~ ~ c c
{1+~) x and (1+~) y ) indeed represent the position coordinates of c c ' =
the orbit centre {see Fig. 3.11). The canonical variabie 9 may be .. written as 9 = + + t where h+ is the central position phase. In an
isochronous magnette field + is constant. In a magnette field which
is not perfectly isochronous + will vary slowly with time. The
function ö9 is a fast oscillating fvnction. Therefore the position
vector of the partiele oscillates (azimuthally) with respect to a
vector which rotates with unit frequency around the orbit centre.
This oscillating behaviour is due to the "scallopi:Jg" of the equi
librium orbit. In a region where the local radius of curvature of the
SEO is small the azimuthal velocity d9/dt will be small also. In a
region with weak curvature of the SEO, the azimuthal position of the
partiele will change reiatively fast.
Fig. (3.11): Partiele motion .wi th respect to the SEO in a 3-fold symmetrie magnette field.
3.4. Accelerated partiele orbi ts in an AVF cyclotron
We now return to the basic Hamiltonian given in Eqs. (3.25) -
{3.28). First of all the canonical transformations derived in the
previous section have to be applied on the Hamiltonian Eq. {3.28)
representing the accelerating voltage. This means that the relations
60

ior r and a as given in Eqs. (3.58) - {3.62} have to be inserted in
Eq. (3.28}. The new Hamil tonian is iound by e>..-p:mding H into a ac power serie oi the centre coordinates x and y . The result can c c again be sp it into two parts as:
- = g(o) +AH Hac ac ac (3.69)
where H(o) contains terms which do not depend on the Fourier compoac
nents A ,B and AH contains all extra terms resulting from the n n ac
azimuthally varying part of the magnetic field. For the moment we
ignore the eifects of the flutter (these will be considered in
section (3.5)} and put in Eqs. (3.58) Ar and AB equal to zero.
In the expansion of H(o) we take into account terms up to second ac degree in x and y . This corresponds with linear equations of
c c mot ion.
Befare writing down the result we introduce a new longitudinal
coordinate '· If we assume that the cyclotron is approximately
isochronous and that the acceleration is done with straight radial -gaps. then the difference between a and t will be approximately
constant. In that case we can write:
where the new canonical coordinate + will vary only slowly with time.
However, if the acceleration takes place with spiral-shaped dees,
then the definition as given above is not so convenient because then
~ still may change considerably during the acceleration process. This
phase-shift is a result of the radial components of the electrio
field at the gap crossings by which the revolution frequency of the
partiele is influenced. We define the new phase such that the zero
degree part (in the centre coordinates) in the expansion of H(o) ac
depends not or only weakly (via the radius dependenee of the Fourier
components in Eq. {3.23)) on the energy variable. In that case the
new phase will vary not or only slowly with time. We define the new
phase by:
where +(r) gives the angle oi the mid-dee line.
61

As a remark we note tba.t the spiraUng of tbe dees ca:n not be used to
"steer" tbe isocbronism of the cyclotron. This will become clear in
section (3.4.2}. A generating function for tbe transformation.given
in Eq. (3.70) is: •
r (E) • • • 0 dE
G(E,+.t) =- E(+ + t)- f dr0+(r'}dr'
aG • • -=- E aï
(3.71)
This generating function leaves the energy variabie unchanged. The
new Hamiltonian may be written as:
- - aG • - -(o) -K-H+-=-E+H +H +AH aï s ac ac (3.72)
with H8
given in Eqs. (3.49) and (3.50}.
We substitute Eq. (3.70} in the relations for r and 9 (Eqs. (3.58) -(3.66)) and then insert these relations in Eq. (3.28). For the
expansion of ü!:) we find the following result:
- co ii(o)= ~ { ~ a cosm(+ + t) + ~ sinm(+ + t}) sinht ac m=-co m m
(3.73)
(3.74)
(3.75)
wbere c1 end ~ are linear in the centre coordinates:
(3.76}
(3.77}
62

The quantities pm' ~· rm and sm are defined as follows:
pm = (m + l)am+l + a~1 (3.78)
~ = (m + l)~'am+l (3.79}
(3.80)
(3.81}
The operators "prime" and "double prime" have been defined in Eq.
{A.11). All radius dependent functions in Eqs. {3.74) - (3.81) have
to be considered as functions of the energy variable.
3.4.1. The accelerated equilibrium orbit
The Hamil tonian given in Eq. (3. 73} bas a complicated shape
due to its oscillating character (i.e. time dependence}. In the
following we eliminate the time dependenee in the zero-degree part
and the first-degree part of H(o). For this purpose wedefine a new ac equilibrium orbit which is called the accelerated equilibrium orbit
(AEO}. In order to findan approximation for theE-+ motion of the
AEO we neglect in the Hamiltonian Eq. (3.73) the centre motion. This
is not a bad approximation since x and y are usually rather small. c c =
With xc = yc = 0 the Hamilton equation for E as derived from Eq.
(3.73) may be written as:
.. aH(o} - ()() dE ac 9Y. -- = - -- = {ha- cosh; + }; mamcos[mt + (m-h)t]} dt a.; 2 ----n _..., (3.82)
m'/.h
where we have split the right hand side into a constant partand an
oscillating part. The variabie + varies slowly with time. Therefore,
for the integration of Eq. {3.82) we can assume ; to be constant.
Integration of Eq. (3.82} gives:
a A
E=E+E osc (3.83)
63

where E05
e is a purely oscUlating lunetion (average value equal to
zero) defined by:
ma
- m -m-b sin [m; + (m-h)t] (3.84)
m'#h
A
Tbe remaining term E in Eq. (3.83) will increase smoothly with time.
Equation {3.83) may therefore be considered as a transformation to a A
new energy variable E which cha:nges smoothly wi th time.
In order to find an approximation for tbe centre motion of the
AEO we neglect in the Hamiltonian Eq. {3.73) the terms which are
. quadratic in the centre coordinates. With this approximation the
Hamilton equations for xc and yc as derived from Eq. (3.73) become:
dxc -qV co Pm + P-m ~ + q_m -- = -~::.___,K,... { I[ 2 sin++ 2 cos,P]sin(m;+(m-h)t) dt 2r0(1+~) -co
co Pm - P-m ~ - q-m -+ I[ 2 cos+ - 2 sin,PJcos(m;+(m-h)t)}
-co (3.85)
- COp +p ~+~ qV K { I[ m 2 -mcós-J! - 2 sin-J!]sin(m;+(m-h)t)
2r0
(1+JL) -oo dt
co Pm - P_m ~ - q-m -I[ 2 sin+ + 2 cos+]cos(m;+(m-h)t)}
-co (3.86)
with pm and ~ defined in Eqs. (3.78) and (3.79) and + the angle of the mid-dee line. The right-hand-sides of Eqs. (3.85) and (3.86) can again be split into a constant part (m = h) and a purely oscillating
part (m '# h}. Assuming that r0
and + change slowly with time the
integration of Eqs. (3.85) and (3.86) leads to the following transformation for the centre coordinates:
(3.87}
A
Yc = Yc + Yosc (3.88)
where xosc and y08
c are oscillating functions defined as:
64

(3.S9)
+ m 1 pm-p-m ~-q-m -I m-h[ 2 sin~ + 2 cos~]sin(m~+{m-h)t)} _.,.
{3.90)
m;th
A
The functions xc and yc in Eqs. {3.87) and {3.88) may be considered
as new centre coordinates which change only slowly with time
3.4.2. The motion with respect to the AEO
We now return to the Hamiltonian for acceleration as given in
Eqs. {3.72) and {3.73). In order to study the motion with respect to A
the AEO we introduce the smooth energy variabie E according to Eq. A A
{3.83) and the slowly varying centre coordinates x and y according c c to Eqs. {3.87) and {3.88). This is performed by a canonical
transformation described by a generating function which depends on
the old canonical momenta and the new canonical coordinates. This
generating function becomes:
A =A A + A
G{E.~.y ,x ,t)= -E~- y x +JE (~.t)d~ +x y {t)-y x {t) {3.91) c c c c osc c osc c osc
!>1"0 ~ a A dy dx ~ = f - E {~.t)d~ +x . osc- y ~ at at osc c dt c dt
{3.92)
The new Hamiltonian becomes:
K = K + 8G = - E + H + H(o) + Aii + 8G at s ac ac at
{3.93)
65

In order to find this new Hamiltonian we have to express the old : A A; A A
variables E. +. x , y in terms of the new variables E. f, x • y and c c • c c insert the result in Eq. (3.93). In the term-E + H we can neglect s the diEferenee between the old and new variable$ because this only
gives rise to cross terms between electrio and magnette field
quantities which are of second order in the flutter or which are of
first order in the flutter and of second or higher degree. For the
calculation of the remaining parts in Eq. (3.93) wè make the follo
wing approxima.tion: we assume that the maximum energy gain per gap
crossing (qV) is much smaller than the energy E of the particle, i.e.
we assume that qV/E is much smaller than unity. In the new Hamil
tonian we take, within each degree, into accoUnt only the terms of
most important order in qV/E. For the calculation of this Hamiltonian
we then can neglect the difference between the old and new variables,
i.e. we only have to take care of the öG/8t in Eq. (3.93). If the
particles are extracted from an external ion souree and then injected
into the cyclotron, the approximation will in most cases be reaso
nably good. For particles extracted from an internal ion souree the
approximation will not be valid for the first acceleration gap. After
that we expect rather accurate results.
The effect of the transformation defined in Eq. (3.91) is that the
oscillating terms in the zero degree part and first degree part oi
Eq. (3. 73) are eliminated by the 8G/8t given in Eq. (3. 92). The new
Hamiltonian still contains oscillating terms of second degree. These
oscillating terms can be transformed to higher order (in qVIE) in a
way more or less simtlar to that given in appendix A.2. We neglect
these higher order terms and therefore we only have to keep the
resonant (i.e. average) terms in the second degree part of the
Hamiltonian. Thus, the new Hamiltonian is obtained trom Eq. (3.73) by just keeping, in each degree, the resonant terms. We find the
iollowing final result (we omit the symbol "'above the variables):
(3.94}
with h the mode number of the acceleration and the coeiiicients ~
and Ph given in Eqs. (3.74) and (3.75).
66

This Hamiltonian can be used for studying the influence of the dee
structure on the energy and central position phase of the particles
and the motion of the orbit centre. We note that the zero-degree part
(in x .y ) of H(o) does not contain the spiral function ~. Tberefore, c c ac
the time evolution of the phase + and the energy gain per turn are
not influenced by the spiraling of the dees. This means that it is
not possible to compensate for loss of isochronism (as occurs for
example in a classica! cyclotron) by an appropriate choice of the
spiral angle of the dees. This well-known result {see for example a
paper by Gordon. Ref. (45)) is due to two effects which counter
balance each other almost completely. The first effect is that the
revolution frequency of the partiele decreases (assuming that the
direction of the spiral is opposite to the rotation direction of the
particle) due to the outward electric field components acting on the
partiele at the gap crossing. This decrease in revolution frequency
tends to make particles arrive later at successive gap crossings.
The second effect is that, as the partiele is accelerated and
therefore moves outward, the angular distance traveled between two
successive gap crossings is shortenedas aresult of the spiral. The
two effects compensate each other such that the time needed for a
partiele to go around and return to the same gap is not influenced by
the spiraling of the gap.
Let us calculate as an example the Hamiltonian appropriate for
the ILEC dee-system. In this case we may use the Fourier coefficients
as given in Eq. (3.20). Substituting these Fourier coefficients in
Eqs. {3.74} and (3.75} and putting~ equal to zero we find for the
Hamil tonian:
-H{o) 2qV sinha . ac - v -h-- Blnht - C xcy c cosh4>/2E
with C and D defined as:
C = gy hcoshasin2a: lr
- 9nV D = ~hsinha
lr
(3.95}
(3.96)
(3.97)
67

These equations are in agreement with the results given in Ref. (13).
The difference in sign as compared totheresult given in Ref. (13)
is due to the fact that we used a left-handed coordinate system.
The Hamiltonian Eq. (3.95) clearly shows the coupling between the
orb i t centre motion and the longi tudinal motion. Th is coupling
becomes large for off-centered particles, high harmonie numbers and
low energies.
In Fig. (3.12) we compare the orbit centre motion of an acce
lerated partiele in ILEC as calculated by a numerical orbi t integra
tion program wlth the analytica! results obtained from Eq. (3.95).
The ini tal energy of the partiele was 200 keV. Ea.ch point in the
ft gure corresponds with one turn. The energy ga in per turn was
approximately 110 keV. The motion was calculated for 20 turns.
4.0.---------,1---------, x anatyticat + numerical
0
+ + +
· +x. n•O + x 'x ~~~r
n =20 xx x x)OÓtxxxx / ............. +-!!+
-~+-++t•r+++++J
I 3.0
xc lmml
-
6.0
Fig. (3.12): Comparison between the analytically and numerically calculated orbit centre motion for an accelerated particle, with initial energy. of 200 keV and final energy of 2.4 Me V, in ILEC; n = turnnumber.
The introduetion cf acceleration causes some problems in camparing
the analytically calculated orbit centre motion with the numerical
results. At each dee gap crossing the orbit centre shifts over a
certain distance parallel to the gap (see also Ref. {13)). In tbe
analytica! tbeory tbis stepwise motion is removed since it is incor
porated in the AEO. In the numerical results it is still present
68

however. Therefore we compared in Fig. (3.12) the analytically
calculated centre positions with the numerical results at 0 and lSO
degrees angular position. For the inital conditions of the analytica!
calculation we used the average of the numerical values at 0 and 180
degrees. The upper and lower curve in Fig. (3.12) give the numerical
results. The curve in between gives the result of the analytica!
calculation.
CENTRE COORDINATES
Ê,~ e 0
~-1 0 xe (mm)
2 3 4
CENTRE COORDINA TES
Ê,~ e 0
~-1 0 xe (mml
n.o 2 3 4
CENTRE COORDINATES
EEEEEEEB 2 3 4
Fig. (3.13): Orbit centre phase space evolution during the first four turns in the minicyclotron ILEC. The figure shows the the effect of varying the half-dee angle a in case of second harmonie acceleration with a two-dee system.
69

The Hamiltonian Eq. (3.95) can be used todetermine the
influence of the half-dee angle a on the cbaracter of the orbit
centre motion (see also Ref. (13)). In Fig. (3.13) we give for
threedifferent values of a (a = 45°, 35° and 25°) the orbit centre
phase space evolution for a grid of particles during the first four
turns in the minicyclotron IU:C. The best beam qual i ty may be
expected for a half-dee angle of 45 degrees. The figure clearly shows
that for a = 25° (IU:C) one bas to adapt the ion souree emittance,
. i.e. if suffi- cient beam current is available one bas to cut away
unwanted parts of the phase space by means of diaphragms.
3.4.3. ·Flattopping
From Eq. (3.95) it fol1ows tbat for a well-centered partiele
(x = y = 0) the energy gain per turn for the two-dee system is c c given by:
BÜ.(o) dE ac -
AE = 211' -= = -211' ~ = 4qV sinhacosh+ dt
We note tbat this formula easily follows from Fig. (3.14). The
maximum energy gain occurs for + = 0°. For an energy spread in the
beam smaller than 0.1%, the phase spread of the 'particles around + = 0° must be less tban ± 1.3° (total width less than 2.6 geometrical
degrees). In order to obtain a high pbase acceptance and a low energy
spread it would be favourable to have, instead of the sinusoidal
shape, a rectangular shape for the time dependenee of the accele
rating voltage. Such a shape is difficult to realize. It can be
approximated, however, by adding to the basic accelerating voltage a
third harmonie Fourier component with a proper phase and amplitude
such that the top of the sine curve becomes more or less flat. This
is demonstrated in Fig. (3.15).
In IlEC the third harmonie of the accelerating voltage is fed
to two addi tional dees which are pos i tioned at an angle fJ = 45° wi th
respect to the second harmonie dees (see Fig. {2.2)). For the study
of the flattopping we have to add to Eq. (3.95) the Hamiltonian for a th two-dee system that is driven by the (3h) harmonie. The extra terms
are easily found from a coordinate rotation over an angle fJ applied
on the two-dee Hamiltonian given in Eq. (3.95). The result is:
70

+ c3 (x cos~+ y sinP)(-x sinP + y cos~)cosh-{~-6)/2E c c c c -~
• si~(~-o)/2E (3.99)
where v3 is the {scaled} amplitude of thè flattop vol~e. ~ = 3h
the harmonie mode number cf the flattop voltage, a3 is the half-dee
angle of the flattop dees, ~ is the rouation angle of the flattop
dees with respect to the main dees and 6 = 0 is the RF-phase of the
flat top vo 1 tage.
Oee voltage
Vsintt
Fig. (3.14): The energy gain per dee for hth harmonie aceeleration, half-dee angle a and phase t can easily be calcula.ted from the moments of gap crossing (t1 and t 2}.
The energy gain per turn for the two-dee system with flattop
ping is ohtained from Eqs. (3.95) and (3.99) and can be written as:
A
!E = qV (cos2~ - Rcos6(~-ö))/{1-R}
A.
where V and R are defined as
(3.100}
(3.101)
(3.102)
71

-· Fig. (3.15): Illustration of the flattopping principle: the effec
tive accelerating voltage contains a first and a third harmonie Fourier component. This makes it posssible to obtain a higher phase acceptsnee and a lower energy spread in the beam.
In ILEC the nattop dees are pos i tioned only at larger radii and
therefore the half-dee angl~ varies with radius. This effect may be "' incorporated by replacing in Eq. (3.100) R and V by "effective"
values Reff and Verr· This can easily be verified by adding for each
turn the energy gain due to the flattop dees and then take the
average per turn. The resul t can be expressed in a .similar wa:y as in
~ !!.. 0 w <J ::::::. 0 w
2~----------------------------------;
<,3 -0.5 ~'
. . ............................................................... : ....................................................... .
w <J
-2~--~L-----------~----------~--~ ·15 0 15
;:, ldegrees)
Fig. (3.16): The energy spread in the beam as function of the partiele phase ~ for flattop acceleration. Calculated from Eq. (3.100) with R = 0.117 and 6 = 0 degree.
72

Eq. (3.98) but with an effective value of the half-dee angle. 0 From Eq. (3.100) it follows that for Reff = 0.117 and ö = 0 the
allowable phase width for an energy spread less than 0.1% is 18.2°
(total width). In Fig. (3.16) we give the shape of AE, calculated 0 from Eq. (3.100) with Reff = 0.117 and ö = 0
If Reff of ö differ from these optima! values then the maximum phase
width is reduced. In order to have good profit of the flattop system
Reff and ö should bestabie within 1% and 0.1° respectively (see
Ref. {46)).
73

3.5. 'R.esonances resultlng from. interference between the dee system
and the flutter profile
In the previous section we ignored interfering influences of
the dee system and the magnette flutter profile on the motion of
accelerated particles. These resonances are described by the Hamil
tonian AH defined in Eq. {3.69). The Hamiltonian AH is obtained ac ac in a simtlar way as H~>. We now insert the general expression for r
and e (Eqs. (3.58) - (3.62)) in Eq. (3.28). expand the Hamil tonian
in a power series of xc and yc and apply the transformation given in
Eq. (3.70). In the result obtained we only keep the resonant terms.
For the expression of AH we find the following result (bere we ac . assume for convenience that the amplitudes of the Fourier component
of the electric field as defined in Eq. {3.23) do not depend on
radius; i.e. we neglect in the expression for Aiiac derivatives like a• a.,
m' m, etc.):
- -îi - g! n AHac = 4 cosb+{I - 2- [{n+h)an+h-(n-h)an-h]
n n(n -1)
A.në2 2 2 2 2 -~ ( 2 )[(n+h+l) an+h+1+(n+h-1) an+h-Ï(n-h+l} an-h+Ï(n-h-1) an-h-1]
2n n -1
Bnë1 2 2 2 2 -l ( 2 )[(n+h+l) an+h+Ï(n+h-1) an+h-Ï(n-h+1) an-h+1+(n-h-1) an-h-1]
2n n -1
ä.nC1+i3nc2 + I 2 [(n-h-1}an-h-1-(n+h-l)~h-l] n n -1
:; c -6 c +I n 12 n 2 [(n-h+l)an-h+l-(n+h+1)an+h+1]} +
n n -1
- -A. + f sinh+ {I 2 n [ (n+h)an+h + (n-h)an-h]
n n(n -1)
~ël 2 2 2 2 -l 2 [(n+h+l) an+h+Ï(n+h-1) an+h-1+{n-h+1} an-h+Ï(n-h-1} an-h-1]
2n{n -1)
Bnë2 2 2 2 2 +l. 2 [(n+h+l) an+h+l+(n+h-1) an+h-1+(n-h+1} an-h+1+(n-h-1) an-h-1 2n(n-1)
74

where we used the following definitions:
-x sin+ + y cos+ ë2= c2 - +'Ct c - c c
• 2- ro(l+~)~
- 1 2 - n+1 -, ~ n3-2 - (n
2-1h. 'E_-a = ( 2)[(n -n+l)B + - 2 B ] - ( 2 (-2 }A + 2 n ] - 2 A n n n- n n n n- n n n
A = A cosn>/1 + B sinn>/1 , A = A + nB >/I' n n n n n n
B = -A sinn+ + B cosn+ , B = B - nA +' n n n n n n
A' = A'cosn+ + B'sinn>/1 n n n
B' =- A'sinn+ + B'cosn+ n n n
The summation in Eq. (3.103) runs over the integers n = kS.
k = 1.2,3, ••. where Sis the symmetry number of the magnette field.
The expression for AÜac as given in Eq. (3.103) is rather be
complicated but also very general in the sense that i t can be
applied to most practical dee systems. The expression may simplify
considerably when one particular dee system is considered in
combination with a given symmetry of the magnetic field. For the
one-dee system the idealized distributton of the acealerating voltage
as ~epresented by Eq. (3.18} may be used. In this case we find for
the Hamiltonian {with + = 0):
75

h-l B cosna AH = g'! (-1)2 {-cosh+ I n 2 . +
ac v n n(n -1)
2 + cosh+ I sinna [-x ((n2+2)B + 3B')+y (3nA + n +2 A')]+
r ( 1+J..I.)~ n (n2-l)(n2-4) c n n c n n n 0
(3.104)
where a = 'JT/2 is the half-dee angle.
The first degree terms (in xc,yc) in Eq. (3.104) represent the electric gap crossing resonance first reported by Gordon Ref. (28).
The resonance is present in case of an odd rotational symmetry of the
magnette field. For an even symmetry of the magnette field no resonant first degree terms are present. The effect of the resonance is
comparable with that of a first harmonie magnette field error (see
for example Ref. (12)}. The ·equivalent first harmonie field compo
nents are given by:
1 (m2+2}B +3B' A sinma - m m m } A1 = 2iii {I 2 2 sinma - htanh! I 2 m (m -l)(m -4) m m(m -1)
(3.105}
(3.106)
where n is the turnnumber.
If we substitute in these equations m = 3 and + = 0 we find agreement with the results given by van Kranenburg et. al. 47) for the gap
crossing resonanee in a 3-fold symmetrie magnette field. However, our
results will be more accurate than those given in Ref. (47) because
in Eqs. (3.105) and (3.106) not only the third but also higher
harmonie field eomponents are included and also the second term in
the right hand side of Eq. (3.105) whlch is present when the phase + is not equal to zero. From Eqs. (3.20). (3.21), (3.22) and (3.103) it can be verified that the gap crossing resonance is also present for a
two-dee system {push-push as well as push-pull) and an odd rotational
symmetry of the magnette field and also for a three-dee system and a
76

four-fold symmetry of the magnetic field. For a three-dee system and
a three-fold symmetry of the magnette field no resonant first degree
terms are present.
The Hamiltonian given in Eq. (3.104} also contains a new term
whieh is independent of the eentre eoordinates and which may
influence the energy and central position phase of the particle. Such
a term is also present in the Hamil tonian for a two-dee system with
an even symmetry of the magnette field. In that case the Hamiltonian
given in Eq. (3.103) beeomes:
ggy (.P'Än-Bn/n} AÜac = v coshfsinha l 2 cosna
n n -1
-?nV (,P'B + Ä /n} -=::c... n n v sinhcf>cosha l 2 sinna n n -1
(3.107)
where a is the half-dee angle. We note that this expression is valid
for the push-push as well as for the push-pull mode. For a three-dee
system with a three-fold symmetrie magnetic field the Hamiltonian Eq.
(3.103) reduees toa sirnilar expression as given in Eq. (3.107) but
with the term 2qV in Eq. (3.107) replaced by 3qV. If the Fourier
components Ä , B or the tunetion .p• depend on radius, then the n n Hamiltonian as given in Eq. (3.107) will give rise toa shift in the
phase f. This in turn will influence the energy gain of the partiele.
In order to get an estimate of the phase-shift we add to Eq. (3.107)
the Hamiltonian for the two-dee systern (as given in Eq. (3.95)) and
assurne that the partiele is well-centered
(x = y = 0}. Furtherrnore we assume that the rnagnetic field of the c e =
cyclotron is perfectly isochronous so that the term -E+H in Eq. s
(3.72) can be ignored. The total Harniltonian then equals H(o) +AH . ac ac
This Hamiltonian is time-independent and therefore we can establish a
relation between the initia! value and the final value of the phase
f. Let us consider as an example a two-dee systern with a half-dee
angle a equal to v/4. For this case the relation becomes:
(3.108)
77

where the subscripts i and f denote initia! and final values
respectively. For sma.ll values of +1 and +r this equation ma.y be
approxima.ted as:
(3.109)
For lLEC we have + = Bn = 0 and therefore the effect is not so
important. However, for a cyclotron with spiral pole tips and spiral
dees the phase shift may become several degrees. For high harmonie
mode numbers such a phase shift is no longer negligible.
78

Appendix A: Some details in the derivation or the the time
independent orb i t behaviour
A.l. Elimination of the equilibrium orbit
From the generating function defined in Eq. (3.36) we derive
the following relations between the old and new variables:
r = __ -aG__ ~ r = r (Ë) + x (r .ê) + f - o e o
öPr (A.l)
'11" = ~ ~ P = P (r .ê} + '11" ... .., r e o (A.2)
"""' .... ., ,. öP ,.. e = ~ ~ e = G+(P +11") ~ (r (Ë) + x (r ,a)) - f ---!. (r .e) (A.3)
öË e öËo eo öË o
". öx öP ~ Ë = E - (P + 11") "e + f "e
e ae ae (A.4)
The functions r , P and x in the right-hand-sides of these o e e
equations still depend on tbc old energy variabie Ë. As can be seen
from Eq. {A.4) the difference between the old and new energy variable
is of first order in the flutter. Therefore we may replace in the
term Peöxe/aê of Eq. (A.4) the old variabie Ë by the new variabie Ê because the correction will be of third order in the flutter.For the
" first order term öx /89 e
öxe öx ~I= ,..,e 89 Ë 8e
"
in Eq. (A.4) we can write:
a2xe - " 3 1 ... + ~ {E - E) + O{f ) E öEö9
The term öPe/89 in Eq. (A.4} can be treated in a similar way. Thus,
up to second order, we obtain for the old energy variabie Ë as
function of the new variables:
" öx öx öP öx öP a2x a2P - e e e e e e e E =E-Pe ae +(-v ae +f ae )+(-11" äe +f 89 )(-'11" aEae +f aEae > (A.S)
79

wbere now. tbe functions x and P have to be evaluated in the point ... ,., , e e E,9. Th.e differenta.tion with respect to E in Eq. (A.5) can be repla-
eed by a dHferentiatièm with respect to r0
by using the relation
between E and r0
Eq. (3.34). FrOJa this equation follows:
8 dro 8 1 a
8Ë = dE ar o = r {1+ J.l.(r ) + r 9!...:d ) ar o o o o r
(A.6)
0
Substitutton of Eq. (A.6) in Eq. (A.5} gives for Ë:
,. 8x 8x 8P 1 8x 8P e!-x h - e e e e e e e E =E-Pe 86 +(-r d9 +f 89 )+ r {1+J.I.)(-wae- +f89 )( 11"8r 89 + f8r 89)
0 0 0
where we neglected the cross term between r dp/dr in the denOJatnator
of Eq. (A.6) wtth the functtons xe and Pe in Eq. (A.5).
By applytng the same kind ot approximations on Eqs. (A.l) - (A.4) we
ftnd the relattons for r, P and 9. In the expansion of 6 Eq. (A.3} r
third degree terms in f and 7f appea.r. These terms are of second
order, however, and thus can be neglected. We find the following
result:
Px e e r = r + x + f - {l } + o e r
0 +J.I.
. P'O
- e p = p + 7f + -2:;--';;....-r e r o(1+JJ.)
O [P- P' + 7f + (0"- 0'}/r] r!(l+J.1.)2 e e o
(A.7}
(A.S}
(A.9}
Ë = Ê - p x + n + n o· e e r2(l+J.1.)
(A.lO}
0
80

where 0 = -rrx + f P and where the operators "dot" and "prime" are e e
defined as:
8 = 89 etc. (A.ll)
We substitute the expresslons for the old variables Eqs. (A.7)
- (A.lO) in the classical Hamiltonian Eq. (3.33} and expand with
respect to the radial variables. For the linear part ü1 of this
expansion we find, up to second order in the flutter, the following
expression:
H1(v,f,Ê,ê)=r[P -{l+~)x -r {l+~)F- 2P F- {l+~)x (F+F') + r0(1+~)FF] e e o e e
+ f[(l+~)(P +{l+~)x ) + r (1+~)2(r2+FF') - {l+~)P {F+F') e e o e
(A.12)
We note that the term FF in Eq. (A.12) is an oscillating term of
secend order which may be omitted.
By putting ü1 equal to zero we obtain two differentlal equations for
P and x which can be written as: e e
P = (l+~)[x + r F +x (F+F') + 2X F] e e o e e (A.13)
2 3xe . x + x - x {F+F') - -- = - r F e e e 2r
0 o (A.l4)
where we have omitted oscillating terms of second order. A
The function Xe is periadie in a and can be represented by a Fourier
series as:
x = r (Ê)x e o e x = ~ + ~ a cosnê + p sinnê e n n n
(A.15)
81

The summation in this expression represents an oscillating term and
therefore we have to calculate an and ~n only up to first order. (In
~ we have to keep terms up to second order). In first order
approximation Eq. (A.14) becomes:
(A.16)
From this equation it follows that the first order part in ~ is equal
to zero. Substitution of xe from Eq. (A.15) and F from Eq. (3.16)
gives the Fourier components an and ~n.The constant ; is obtained by
substituting the first order solution for xe in Eq. (A.14) and by
keeping only the constant (i.e. average) parts of the second order
terms. The lunetion P is obtained by substituting the expression for e . xe in Eq. (A.13). The second order terms xeF and xeF in Eq. (A.13)
turn out to be oscillating terms which thus can be omitted. The
result is given in Eqs. (3.38) - (3.41).
With this definition of xe and Pe the linear part H1 in the expansion of the classica! Hamiltonian Eq.(3.37) is equal to zero up to second ordër in the flutter.
In Ho and H:z we keep terms up to second order and in ~ and H4 terms up to first order in the flutter. We find the following result:
- 1 2 2 -2 ~2 ~ H-= - r (1+p.) [1 + x - x - 2x F] --u2o e e e (A.17)
. . . + (l+p.)~f [-F-F'- 3x F' - 2i F' - x F" + 3FF'] e e e
21 • - •• 3.:. •• 1.:2 •• +'1'[--F-2x(F+F')--x F+-r-FF] 2 e 2 e 2 (A.18)
(A.19)
82

-11 2 ~ -41 ..:. ..... 3 H4 = ~~1+~) (5- 3 ( 1+~) - 34xe)E - 6 (1+~)(3xe + 3F +F )f v
ro
(A.20)
A.2. Elimination of the oscillating terms !rom the Hamiltonian
We apply the transformation to action-angle variables defined by
the generating function Eq. (3.46). Within the approximations used,
we find the following relations between the old and new variables:
K "' E = (2I/(1+~)) cos(~- 9) (A.21)
K "" v = (2I•(1+~)) sin(~ - 9) (A.22)
(A.23)
,.. ..., E =E-I (A.24)
where ~ and r have to be considered as functions of the new energy 0
variabie E. These equations have to be substituted in the old Hamiltonian Eqs.
(A.17} - (A.20). We note that the difference between ê and ä in Eq.
(A.23) can be ignored. We first calculate the Hamiltonian as a
function of the new radial variables I.~. the new angular coordinate A
ä and the old energy variable.E by substituting the expresslons for f and vin Eqs. (A.17}- (A.20). After that we take into account the
difference between Ê and E as given in Eq. (A.24). In Ë3 and 84 this
difference can be ignored. From 80 we obtain some extra terms which
are of secend degree in the radial variables. The Hamiltonian ~
gives rise to extra terms of fourth degree. We find for the new
Hamiltonian:
S3

(A.25}
H_ = 21(1+~){- -21 x2
+r21 i 2- -2
1 x x'+ -21 i i·+ i (F+F'}- -2
1(F+F'}sin2(.-Ö} -"2 e e e e e e e
• - • • 3.:. •• 1.:2 •• 2 "' + [-F- 2xe (F + F')- 2xeF + 2~- FF]sin (~-9}} (A.26)
3/2 ~ ! IJ." iL - (21) U+JI:l [- !r1- 3 - 5x- ) 3( "'a) -:i - r 2' (1~} e cos .-
o 1 2 "' "' - (F'+W")cos (~a}sin(~-a)
. . "' 2 "' 1.. 3 "' - (F+F')cos(~-e}sin (~-a}- ~sin (~a)] (A.27}
1 .. 2"' 2 "Je 1•••• - 3-- 2 (2F'+F")cos (~-S)sin (~11)- 2 {F+F')cos(.-e)sin (~9)
1 ... 4 "Je H'" - ~" - 6 F sin (.-11) + 64 (l+ÏÏ ]
where we omi tted some osci llating terms or second order in
~ and some oscillating terms or first order in ii4 •
The classical Hamiltonian may now be written as:
84
(A.2S)
{A.29)

where the functions e0 , e2 , e3 and e4 are constant (ä-independent)
quantities and the functions fo· r2. f3 and {4 are oscillating
quantities (average value equal to zero}. The lowest order terms in
e0
, e4 , r3 and f4 are of zero order (O{f0}}, in e
32and f2 of first
order (O(f}) and in e2 and r0 of second order {O{f )). We want to
construct a canonical transformation by which the oscillating terms
of first order in ~· of zero and first order in ~ and of zero order
In ü4 can be removed from the Hamiltonian. In order to find such a
transformation we first consider the linear motion, i.e. we ignore
for the moment ~ and ü4 • In this case the term If2 in ü2 bas to be
removed. Let us consider the following generating function:
• • • = where E,B.I and ~are the new variables and u2 is a yet unknown
function. The relation between the old and new energy variabie
becomes: .. öG E=---+ .
a a
(A.30)
= We substitute this relation in e
0(Ë) and expand this term around E:
Substitution of this expression in Hel gives a new term of second
degree and first order namely the term -I(ëJU2/ä9){deofdE}. Wedefine
u2 such that this term compensates the already existing oscillating
term of first order in~· With deofdE = 1+~ we have for u2 :
äU2 aa = r~{l+~)
Let us now also include the third degree part ~but still ignore ü4 .
Analogous to Eq. (A.30) we may now try the generating function:
(A.31)
85

We calculate the relations between the old and new variables Erom Eq. (A.31) and substitute the result in Eq. (A.29). Within the approxi
ma.tions used we Eind for the shape of the new Hamil tonian:
The oscUlattng term of first order in ~ bas been removed. The new
term If28U2f8~ is second order.The oscillating zero order term in "3 bas been removed.However,we obtain new first order terms in "3· The
oscillating parts of these two terms still have to be removed. - 32 moreover, we obtain a new zero order term in H4 namely 2I !3803/ö~.
The oscillating part of this term bas to be removed also.
We now define the complete transformation by which all the oscilla
ting terms of zero order in "3 and ii4 and of first order in ~ and "3 can be removed:
a N = • • • •3~- =3/~- ·~-G(I,~,E,G} =- ËS- I~- IU2 - I ·-u3 - I -v3 - I-u4 (A.32)
8U2 ä9 = E2f(l+J.t) f2 = O(f). u2 = O(f} (A.33}
8U3 aa = f3/(l+J.t) f3 = O(f0
), u3 = O(f0) (A.34)
av3 803 3 802 89 .. osc[f2 a., + 2 f3 ö~ J/(l+J.t) v3 = o(r) (A.35)
8U4 3 803 89 ::= [f4 + 2 osc (r3 a., )]/(l+J.t)
0 0 f 4 = O(f ), U4 = O(f ) (A.36)
86

= - = öU2 =112 öU3 =112 BV3 a 804 E = = -+ E = Ë - I [aa + I aa + I aa + I aa J (A.37)
a a
~ -ac N = = 802 =112 au3 =112 av3 • 804 a = - -+ a = a + I [öE + I öE + I öE + I öE J
aF! (A.3S)
(A.39)
(A.40)
where we introduced the notation osc for the oscillating part of a
function. The right hand sides of Eqs. (A.37) - (A.40) still contain
the old energy variabie E and the old angle variabie ~. We first • = = calcuiate the Hamiltonian as a function of the new variables E,a,I
and ~he oid variabie ~. i.e. we substitute Eqs. {A.37) - (A.39) in
the Hamiltonian Eq. (.29). Within our approximations we may replace =
in Eq. (A.29) ë by a.Next, we have to substitute the expression for ~ ~ = E in the Hamiltonian.The difference between E and E can be neglected
except in the term e0
(E). For this term we find:
where we used the definitions for u2. u3. v3 and u4 . 3/2 2 We also have to substitute the expresslons for I, I and I in Eq.
(A.29). For I312 and I2 we can use the relations:
(A.43)
Substitution of Eqs. (A.39), (A.41} - (A.43) in Eq. (A.29} gives:
87

+ i2(e4+f2 8~4 + ;! e au3 + ;! <f au3> +;! f3 8Vö"'3 + T 2 3ö.p 2 3ö.p 2 T
3 auau au au
4- f3 f'I.A2 __;! + 2e _! + 2f _!)
""' ö.p 4 ö.p 4 ö.p (A.44}
where we introduced the notation < > for the average part of a
function.Finally we have to take into account the diEferenee between •
.p and .p. This difference only gives some new terms which arise from
the third degree part in Eq. (A. 44). The Hamil tonian as a tunetion of
all four new variables becomes:
This Hamiltonian still contains oscillating pa.rts of second order in
80 and ~ and oscillating parts of first order in 84• In principle
these oscillating pa.rts also have to be transformed to higher order.
However, within the approximations used, this transformation does not
change .the Hamiltonian anymore, i.e. in Eqs. (A.44) and (A.45) we only have to keep the constant pa.rts. This gives:
(A.45)
We calculate the functions e0
••• r4 from Eqs. (A.25)- (A.29) and the
functions u2• U3• V3 • u4 from Eqs. (A.33) - (A.36) and substitute
these in Eq. (A.46). The result is given in Eqs. (3.49) - (3.54).
ss

A.3. The relations between the position coordina.tes and the
canonical variables
First we have to apply· the transformation to the radial
variables f and v as represented by Eqs. (A.7) - (A.10). We keep
first degree terms of zero and first order and second degree terms of
zero order. Within this approximation Eqs. (A.7) and (A.9) become:
r = r(E,9,f,v) = r (1+x )+f(1+P }-vi /(1+~) o e e e (A.47)
a= acÊ.ê.f,v) = ê+P- ~P +P'}+ ~1+x +x'}/(1+~) er eer ee (A.4S) 0 0
with x and P defined in Eqs. {3.38) - (3.41). e e The next transformation is the transformation to action-angle
variables I.~ as defined by Eqs. (A.21) - (A.24). In Eq. (A.47) we A
obtain a new term arising from the expansion of r around E. The 0
result is:
- ~ :. - .:. - I r = r (1+x )+(21/(1+~)) [(l+P )cos(~a)-x sin(~a)]- (l ) {A.49) o e e e r0
+~
The next transformation is the "smoothing" transformation defined by
Eqs. (A.37) - (A.40). Within our approximations wecan ignore the ~ = ~ •
difference between E and E and also the differencebetween 9 and a.
Furthermore we can write for ~.I and the term (2I)~:
(A.51)
. I = I {A.52)
(A.53)
Substitution of Eqs. {A.51) - (A.53) in Eqs. (A.49) and (A.50) gives:
S9

(A.54)
a R D D • 1 S ~ 1 öU2 1 ·~ 8U3 • D
G(E,G,I,~) = G+P + =-t2I/(l~}) [(l+x +x'+ ia--+ i I ~- }sin(~B) e r0
e e ~ vr
(A.55}
We calculate the functions u2 and u3 from Eqs. (A.33} and (A.34) and
substitute these functions in Eqs. (A.54) and (A.55). After that we
introduce the cartesian coordinates for the orbit centre according to
Eqs. (3.47) and (3.48). This then gives the result represented by
Eqs. (3.58) - (3.62).
90

4. IlOMENT AHALYSIS OF SPACE aJARGE EFFECfS IN AN AVF CY'a.DTRON
In comparison with linear accelerator structures the circular
accelerator has the addi tional complication that a change in momenturn
spread due to longitudinal space charge forces immediately influences
the transverse partiele distribution. The isochronous cyclotron is
especially sensitive for this effect because of the absence of longi
tudinal RF-focussing. In this chapter we derive a set of differen
tlal equations for the second-order moments of the phase space
distributton function which takes into account this special feature
of the circular accelerator. For the isochronous cyclotron also a
smoothed system of equations is obtained which gives extra insight
in the problem. The derivation is an application of the RMS{root
mean-square}-approach in which only the linear part of the space
charge forces as determined by least-squares metbod is taken into
account and the charge distributton is assumed to have ellipsoidal
symmetry. Since the longitudinal-transverse coupling may destroy the
symmetry of the bunch with respect to the reference orbit we allow
the ellipsoid to be rotated around its vertical axis. Different
integrals of motion of the moment equations are obtained including
the total angular canonical momenturn in the bunch, the total energy
content of the bunch and the RMS-representation of the 4-dimensional
horizontal phase-space volume. For bunches with a circular horizontal
cross section the smoothed moment equations reduce to RMS-envelope
equations. Some numerical results obtained with the model will be
presented. For this purpose the 3 MeV mini-cyclotron ILEC will be
taken as an example.
4.1. Introduetion
Analytica! studies of space charge effects in accelerators
which appeared in the literature thus far are mainly concerned with
linear structures 24- 26). For circular accelerators such as the
cyclotron the analysis is mostly done with numerical calculations
basedon many- partiele codes 23•27>. In comparison with a linear
structure the circular accelerator has the special feature that the
transverse position of the partiele depends on the longitudinal
91

momentum due to dispersion in the bending magnets. This means that a
change in longttudina.l momentum spread immediately influences the
transverse partiele distribution. Particles in the "taU" of the
bunch will lose energy due to the longi tudina.l space charge forces
and thus move to a lower radius. The opposite happens for the leading
particles in the bunch. The isochronous cyclotron is especially
sensitive for this effect because there exists no RF-focussing in the
longitudina.l phase space. Numerical calculations as done by Adam 29}
show that the effect can become really important in an isochr.onous
cyclotron.
Approximate representations for relevant properties of the
bunch such as the sizes and the momentum spread are obtained from the
second-order moments of the phase-space distributton function. In
this ehapter we derive differenttal equations whieh determine the
time dependenee of these moments. This time dependenee is directly related to the time dependenee of the distributton tunetion as
determined by the Vlasow equation. This equation can be obtained from
Liouville's theorem and therefore the time dependenee of the moments
follows from the HBmiltonian. Now, the second-moment equations form a
closed system if the equations of motion for the single partiele are
linear in the variables, i.e. fora Hamiltonian which is quadratic in
the variables. For this reason we will use a linear approximation for
the externa.l forces as well as for the space charge forces.
In section 4.2 first of all some basic equations will be
presented. Insection 4.3 we derive a suitable Hamiltonian for the
linearized partiele motion in the externa.l magnette field without
space charge. For this we make the same approximations as in Ref. 12;
the most important being the assumption of an azimuthal varlation of
the magnette field which is not too large. For convenianee we omit
the acceleration process. The derfvation is such however that
acceleration can be included in a straight-forward way using methods
developed by Schul te et. at. 14•48). The Hamiltonian describes the
partiele motion in a coordinate system which moves with the bunch
along a reference orblt (equilibrium orbit). Due to the azimuthal varlation of the magnette field the Hamiltonian depends explicitly
on time. By a smoothing procedure this time dependenee is removed
resulting in a more simple Hamiltonian for an isochronous cyclotron.
In section 4.4 we then define an electric space charge
92

potential which is quadratic in the variables and which has to be
added to the unperturbed Hamiltonian. This potential also includes
the magnetic self-field of the bunch. For the definition we
generalize Sacherer's approach 2S) in which the linear part of the
forces is determined by a least-squares metbod and the charge
distributton is assumed to have ellipsoidal symmetry. Here we allow
this ellipsoid to be rotated around the vertical axis through the
bunch because the dispersion effect in the cyclotron may destroy the
symmetry of the bunch with respect to the equilibrium orbit. For the
calculation of the electric fields we neglect the curvature of the
equilibrium orbit. This will be a good approximation as long as the
transverse size of the bunch is small compared with the local radius
of curvature. With these assumptions the coefficients in the
potential function can be expressed in terms of the second moments of
the charge distribution.
In section 4.5 we derive two systems of moment equations
using the results obtained in section 4.3 for the partiele motion in
the external magnetic field and the electric space charge potential
derived in section 4.4. Each system forms a set of thirteen coupled
first order differentlal equations. The first system corresponds with
the time-dependent Hamiltonian and may be considered as being the
most general of these two in the sense that the least amount of
approximation has been used in the derivation. The second system
corresponds with the smoothed Hamiltonian for the isochronous
cyclotron. These equations contain the extra approximation that the
influence of the smoothing procedure on the electric potenttal
function is neglected. On the other hand these equations may give
extra insight in the problem. Within the approximations made, the
numerical integration of the moment equations will give a description
of the root-mean-square (RMS) properties of the bunch under space
charge conditions.
4.2. Basic equations
We consider a canonical system with generalized coordinates
x= (x,s,z), canonical momenta p = (p ,p ,p ) and independent timex s z variabie t.
The motion of the partiele follows from the Hamiltonian H = H(x,p,t)
93

. via the Hamilton equations:
22. 8H • dt = - 8x
The phase-space distributton tunetion i(x,p,t) is deiined as the
partiele density in the 6-dimensional phase space:
dN = f(x,p,t}dxdp
(4.1)
(4.2)
where dN is the number of particles in the phase-space volume dxdp.
The total number of particles in the buneh then becomes:
co
N = ff f(x,p,t)dxdp (4.3) -co
Accordtng to Liouville's theorem the distributton function f remains
constant for an observer wbo travels with an arbitrary partiele in
phase space. This means that f is an integral of motion of the
canonical system:
~ _ M.. + ar dx + M.. 22. _ 0 dt - 8t 8x dt öp dt - (4.4)
Substitution of Hamilton's equattons (4.1) in Eq. (4.4) gives the
Vlasow equation:
(4.5)
Under space charge conditions the Hamiltonian H takes the following
form:
H(x,p,t) = H0(x,p,t) + q+(x,t) (4.6)
where q is the charge of the particle. ; is the potenttal function
due to all the other particles in the bunch and H0
is the Hamiltonian
corre5Ponding with the external forces.
We introduce a curved coordinate system (x,s,z) where x is the
horizontal coordinate of the partiele with respect to the curved
orbit, s is the distance along the curved orbit and z is the vertical
94

coordinate. If we ignore for the moment the self consistent magnetic
field then the potential function f follows from the Poisson
equation. In the curved coordinate system this equation becomes:
_1_ {L {(1 + :!!.-) a;)+ L (-1- a;}+(1 + :!!.-) a2;} =- L (4.7) l+xlp ax p ax as l+xlp 8s p a 2 ê c c c c z 0
where p is the space charge density in the bunch and p = p (s) is c c the local radius of curvature of the curved orbit. However, in the
subsequent analysis it is assumed that the transverse size of the
bunch is much smaller than the local radius of curvature p (s). In c this case, locally the coordinate system can be approximated as being
cartesian and the Poisson equation simplifies to:
821#1 + 82! + 821#1 = - L 8x2 äs2 äz2 eo
(4.8)
The self consistent magnetic field can be included if we neglect the
velocity-spread in the bunch, i.e. if we assume that all particles
have the same velocity v . Equation (4.8) then bas to be slightly 0
adapted to the form:
2 2 2
8!+84>+1._81#1= _ _1!_
8x2 äz2 ~2 äs2 e ~2 0
(4.9)
where ~ is defined as ~ = {l-v2/c2)~ and c is the speed of light. 0
Finally, the charge density p is simply related to the distributton
function f via the formula:
.. èO
p(x, t) = it J f(x,p,t)dp ~ q f f(x,p,t}dp 1+ Pc -«> _..
(4.10)
The second moments of the distribution function are defined
as expectation values of the products of two canonical variables. For
example, for the second moment (xpx> we obtain:
.. <xp > = N! ff xp f(x,p,t)dxdp x -«> x (4.11)
95

The Vlasow equation determines the time evolution of the second
moments. Consider as an example a system with only one degree of
freedom where H = H(x,p ,t). If we multiply the Vlasow equation with 2 2 x
x • xpx and Px respectively and integrate over the phase space we
obtain the following system of equations: ,
(4.12}
where partlal integration bas been used to calculate the right-hand
sides. (We note that Eqs. (4.12) immediately follow by intercbanging
the averaging and the differentation in the left-hand-sides of the
equations.) From Eqs. (4.12) it follows that fora Hamiltonian which
is quadratic in the variables, the right-hand sides depend on second
moments only. In this case the system of equations is closed, provi
ded that the coefficients in the Hamiltonian can he expressed in
terms of the second moments or that their time-dependenee is known.
4.3. Tbe single partiele Hamiltonian
In this section we derive a suitable Hamiltonian H0
for the
linearized motion of non-accelerated particles in an AVF-eyclotron.
It is assumed that the magnette field bas perfect symmetry with
respect to the median plane and perfect S-fold rotational Sytmletry
(S ~ 3). Furthermore it is assumed that the amplitude of the azi
muthal variation of the magnette field is not too large. In this
respect the same approximations as in Ref. 12 will be used.
(4.3) coordinates (r,e) the magnette field in the median
plane can he separated in an average part and an azimuthally varying
part (the flutter) which is represented by a Fourier series:
B(r,9) = B (r) [1 + I{A {r) cos n9 + B (r) sin n9)] n n (4.13)
where B(r) is the average field at radius r. Due to the assumed
8-fold Sytlllletry only terms with n = kS, k = 1,2,3 ••. are present in
the Fourier series. We consider a raferenee partiele with kinetic
96

momenturn P and associated with this kinetic momenturn we define a 0
reference radius r with the relation P = qr B(r ). For subsequent 0 0 0 0
use we introduce the following field quantities to be evaluated at
the reference radius r0
:
(4.14}
and simtlar definitions for the sine-coefficients.
For the study of space charge effects it is conventent to use
curved coordinates instead of polar coordinates. For this purpose we
choose the so-called equilibrium orbit as reference orbit. The equi
librium orbit is defined as a closed orbit in the median plane with
the same S-fold symmetry as the magnette field. In polar coordinates
the equilibrium orbit for the reference partiele is given by the
relation 12>:
ro [1 - ~( 3n2 - 2 (An2 + Bn2) + 1 (A A' +BB' )) 4{n2_1)2 2 (n2-l) n n n n
A B + ~ ( __!!.__ cos n9 + __!!.__ sin ne ) ]
n2 -1 n2 -l (4.15)
The effective radius R is defined as the length of the equilibrium 0
orbit devided by 2r. Using Eq. {4.15} we obtain for R : 0
A2 + B2 +A A' +BB' Ro = ro [1- ~ n n n n n n] (4.16)
2{n2 - 1)
The general expression for the Hamiltonian H in the curved 0
coordinate system is given by:
97

2 where E = m c is the rest energy and m the rest mass, p (s) is the 0 0 0 c
local radius of curvature of the curvedorbit and A , A , A are the x s z components of the magnetic vector potential. We choose the coordinate
system such that (x,s,z} forma left-handed system. With this defi
nition a positively charged partiele moves in the direction of increasing s when the magnette field is pointing in the positive
z-direction.
If B(x,s) is the median-plane field as a function of the new
coordinates x and s then a related vector potentlal in the lefthanded system is:
- ~ z2 8B • Ax(x,s,z} = 1 + xlp 88+ O(z} c
8B 1 x • As(x,s,z) = ~ z2 ax- 1 +x/ f {1 + ~} B(x',s)dx' + O(z4 ) (4.18)
Pc o Pc
Here we used the symmetry of the magnette field with respect to the
median plane z = 0. In order _to calculate this vector potentlal we need the median-plane magnette field B as a function of the new
coordinates x and s. For this we make the transformation from the
polar c;oordinates r and 9 to the curved coordinates x and s using the
expression for the equilibrium orbit Eq. (4.15} and substitute the
result in the expression for the median-plane field Eq. (4.13).
Expanding A and A wi tb respect to xlr and z/r and retaining terms x s 0 0
up to second degree we obtain for the vector potential:
(4.19)
ra - x lx2 o lz2
A (x s z}=- r B(r ) [---- (Q + -) +--o] s ' ' o o pc 2 r 2 z p2 2 r2 :z
0 c 0
(4.20)
Here Qz(s} an& the local radius of curvature pc(s) are given by:
-n2 (A2 +B2)+A A'+B B'+A A"+B B" Q (s}=-[~'+] n n n n n n n n n n I(A'cos~+B'stn[!)J(4.21)
z 2(n2-1) n Ro n o
(n2 -2)(A2+B2)-(A A'+B B') ( ) [ 1 I n n n n n n -I(A cos ~B si ns,] (4.22)
Pc s =ro + 2(n2 - 1) n Ro n ~~
98

Due to the choice of the coordinate system the variables x, z, px and
Pz may be assumed to be small compared to r 0
and P 0
respectively
This is not so for the variables s and p . For this reason we intro-"' s
duce a new longitudinal momentum ps as the deviation between the true
canonical momentum p and the kinetic momentum P of the reference s 0
particle. Furthermore we introduce a new coordinate system which
moves with the reference particle, i.e. we define a new longitudinal
coordinate s which gives the position in the bunch with respect to
the "centre" of the bunch defined as the position of the reference
particle. The transformation becomes:
S = V t + S 0
p = p + p s 0 s (4.23)
where v = P /~ is the velocity of the reference particle. The 0 0 0
generating function for this transformation is:
(P -p ) - v p t 0 s 0 s (4.24)
All new variables may now be considered as being small quantities and
therefore the Hamiltonian can be expanded with respect to the
coordinates and the momenta. We take into account terms up to second
degree in the variables.This corresponds to linear equations of
motion. We find for the new Hamiltonian:
1 z lil x PS + 2 Qz(T)(R) - T}(T)R'P) {4.25)
0 0 0
Here we have omitted a constant term (E2 + P2 c2)~ because this term 0 0
does not contribute to the form of the equations of motion. The
variabie T is defined below. For the quantities ~· Qz and 1} we find
the expressions:
-(A2 +B2 )+A A'+B B'+A A"+B B" ~(T)= l+~'+ I n n n n n n n n n n +
2(n2 -1)
+ I{2A +A')cosnT+{2B +B')sinnr n n n n {4.26)
99

-n2 (A2 +B2 )+A A'+B B'+A A"+B B" Q (T) = -(;'+ ~ n n n n n n n n n n +
z 2(n2-l)
+ ~·cosnT + B'sinnT] n n (4.27)
(4.28)
In order to eliminate the constants in the Hamiltonian Eq.
· (4.25) we introduce new relative variables and a new dimensionless
time unit T. This time unit is deUned such that an increase of 2r
correSJIODds wi th one revolution of the bunch in the cyclotron. The
variables are normallzed on quantitles belonging to the relerenee
orbit and the relerenee pa.rticle. In order to maintain Hamilton's
equatlons the Hamll tonian must be adjusted accordingly. It is
conventent also to normalize the charge density p, the electric
potentlal lunetion + and the phase-spa.ce distributton lunetion f.
The scale transformation is defined by:
- x - z x =r z=r 0 0
- Px - Pz Px =p- Pz=p
0 0
v0
t - îl T =r H=:yp 0 0 0
3
-. Rop
·=~ p =--CJ.'T
0 0
The Hamiltonian under spa.ce charge conditions Eq. (4.6) and the
single-partiele Hamiltonian Eq. (4.25) now become:
{4.29)
H(i,p,T) = ü0
+ i(i,T) (4.30}
ü =!pa+ 1p2 + lp2 + lo(T)x2 + !Q (T)z2 - ..,n(T)_xp_ (4.31) o 2x 2s 2z 2--x 2z s
The potenttal lunetion + follows from Eq. (4.9) which now, due to
transformation Eq. (4.29), transforma into the usual Poisson
equation:
100

(4.32}
The expressions for the charge density pand the nurnber of particles
in the bunch N we obtain from Eqs. (4.3) and (4.10):
Cl)
p = JIJ r(x.p,T)dp (4.33) -CIO
Cl)
N = fff p (x,T)dX (4.34) -CIO
The Hamiltonian H given in Eqs. (4.30) and (4.31) describes
the motion of a single partiele with respect to an approximately
cartesian coordinate system. This coordinate system itself moves with
the bunch along the reference orbit. In sectien 4.5 we derive from
this Hamiltonian the non-smootbed moment equations.
The equations of motion as derived from the unperturbed
Hamiltonian H show that z obeys an homogeneaus Hill-equation and x 0
an inhomogeneous Hill-equation with momenturn deviation as a driving
term:
(4.35)
(4.36)
Equation (4.35) shows the influence of the longitudinal momenturn
deviation on the horizontal position of the partiele as already
mentioned in the introduction. In the absence of space charge p is s
an integral of motion because H0
does not depend on s. However, due
to space charge p will change and Eq. (4.35) can not be solved s
separately from the longitudinal motion. Also the longitudinal
motion.is coUPled with the transverse motion as follows from
Hamilton's equation for 5:
(4.37)
101

The equilibrium orbit for particles with a longitudinal momentum
deviation p is found as the periodical solution of Eq. (4.35). For s this we obtain:
A2+B2 + 4(A A'+B B') +A A"+B B" + A' 2+B' 2 x = -yp [t-il, _ :I n n n n n n n n n n n n e s 2(n2 - 1)
(A +A') + :I( n n
n n2 -1 cosnT + sinnT)] (4.38)
The cyclotron is isochronous if the average value of ~~ over one
revolution is zero for particles with deviating momentum p which . s follow the equilibrium orbit Eq. (4.38). Substituting Eq. (3.38) in
Eq. (4.37) we find the condition for isochronism:
3(A A'+B B') +A A"+B B" + A' 2+B' 2 ji• = 1 _ !.__ _ :I n n n n n n n n n n
~2 2{n2 - 1) (4.39)
The quantities ~· Qz and ~as given in Eqs. (4.26), (4.27) and
(4.28) contain a time-dependent oscillating part and therefore H is 0
not an integral of motion. As bas been shown in Ref. 12 the oscilla-
ting parts of the Hamiltonian can be transformed to higher order in
the magnetic field flutter (i.e. the azimutbally varying part of the
magnetic field} such tbat, within our approximations, the new
oscillating parts can be neglected. For this purpose a linear cano
nical transformation is applied which changes the coordinates and
momenta only slightly; the difference between the old and new
variables being of the order of the flutter. The new smoothed
Hamiltonian bas the same sbape as in Eq. (4.31) with ~.Q and ~ 2 2 - z
replaced by time-independent values v ,v and ~ where v and v are x z x z the horizontal and verticàl tune respectively. The new Hamiltonian
becomes:
(4.40)
where x.z.i are the new canonical coordinates and Px· Ps· Pz the new
canónical momenta. For v , v and Ti we find the expressions: x z
102

(4.41)
-n2 (A2 +B2 ) +A A'+B B' + A A"+B B" v2 = -[ji.'+ ~ ( n n n n n n n n n n z
A'2+B'2 n n )] (4.42)
2{n2 - 1} 2n2
(4.43)
We note that the expresslons for v and v2 agree with the results x z given in Ref. (12). Using Eqs. (4.41) and (4.43) the condition for
isochronism (i.e. Eq. (4.39)} can be written as:
= and with this expression the Hamiltonian H
0 for an isochronous
cyclotron simplifies to:
= 1 - 1 - - 1 - 1 -H = - j)2 + ;i(p - V x)2 + - j)2 + - v2 z2 o 2x 2s x 2z 2z
This Hamiltonian can be brought into a symmetrie form with a A A A
(4.44)
(4.45)
canonical transformation to new momenta Px· p5
, Pz which leaves the
coordinates unchanged. The transformation is defined as:
G
(4.46)
= x =x s ::: s z = z
103

With this transformation the smoothed Hamiltonian for the isochronous
cyclotron takes the fina.l form:
(4.47)
In section 4.5 this Hamiltonian will be used to obtain the
smoothed moment equattons. As a remark we note that the part of thts
Hamil tonian which describes the hortzontal motion bas the same
structure as the Hamiltonian fora partiele that moves in a homo
geneaus magnette field. From this it results that for an isochronous
cyclotron in the absence of space charge and within the smooth
approximation made for the derfvation of Eq. (4.40). the partiele in
the bunch carries out a circular motion in the coordina.te system
moving with the bunch. The motion wil! be morè complicated in reality
but nevertheless it wil! have approximately the same characteristics. ,.. ,.. The coordina.tes of the centre of the circle (X ,S) and also its ,.. radius À are integrals of motion For the vertical motion the quantity ,.. 1 ,.. 1 ,.. I = -2 p2 + -2 v2 z2 is an integral. Solving the equations of motion z z ZA A A A
resulting from H0
we find for X. S and À :
.... x
... s (4.48)
In the absence of space charge. any lunetion which depends only on A A A A
the integrals X , S • À and Iz would be a stationary distribution.
As a second remark we note that the coupling in the
Hamiltonian given in Eq. (4.47) can be removed with a transformation
to the "I.armor frame". This frame rotates with frequency i vx in the
horizontal plane around the vertical axis through the bunch. The
transformation is defined as:
104

G -
where x1, s1 , z1, pxl' psl and Pzl are the new variables in the
Larmor frame.
The Hamiltonian in the Larmor frame becomes:
(4.49)
(4.50)
lt should be noted that the Poisson equation is invariant for the
point transformation defined in Eq. (4.49) and furthermore that the
equations of motion as derived from H01 have the same shape as the
equations of motion used for the study of space charge effects in
linear accelerator structures 25 •26>. As a consequence, the samekind
of space charge solutions as obtained in linear accelerator
structures will be possible for the Hamiltonian in the Larmor frame
Thus, envelope equations for the RMS-sizes of the bunch in the
rotating Larmor frame could be derived in the same way as has been
done by Sacherer 25) for ellipsoidal bunches in linear accelerator A A A
structures. However, in the initial non-rotating frame (x,s,z)
these bunches then rotate with the frequency l vx around the vertical
axis. Therefore, this special solution does not seem to be very
useful in practice, except maybe for very short bunches with approxi
mately equal longitudinal and radial sizes.
105

4.4. The electrio potential lunetion
As already bas been menttoneel in the introduetion we want to
use a linear approximation for the space charge iorees. With this
condition satisfied we obtain a elosed system of differenttal
equations for the second moments, as bas been pointed out in section
4.2, provided that the coefficients in the electrio potenttal
function can be expressed in terms of the seeond moments. We assume
that the charge distributton is symmetrie with respect to the median
plane and that the bunch is centred with respect to the equilibrium
orbit. The most general approximation for the electric potenttal
function, giving linear space charge iorces, then becomes:
(4.51)
The term d(T)xs is included in order to take into account a possible
non-symmetrie distributton of the bunch with respect to the equili
brium orbit which may occur as aresult of the transverse-longitu
dinal coupling in the unperturbed Hamiltonian. The linear
approximation for the electric field as derived from Eq. (4.51) becomes:
_ ai0
_ _
Exo =- -:-= a(T)x + d(T)s ax
- aio - -E
50 = - - = d(T)x + b(T)s
a& . a+
Ë =- ~= c(T)z zo ai
(4.52)
We use the least squares metbod as introduced in Ref. 25 for the
definition of the linear part of the electrio field, i.e. we minimize
the averaged difference D between the áctual electrio field and its
linear approximation where D is defined as:
CIO
n = ff IË - Ël 2 rcx.p,T)didp -110 0
CIO
=. ff [(ai+ds-Ë )2 + Cdi+bs-Ë )2 + (ci-Ë )2 J rcx.p,T)didp (4.53) _ CIO X S Z
106

where Ë , Ë and Ë are the actual components ofthe electric field. x s z
Differentiation of Eq. (4.53} with respect to a,d, band c respecti-
vely gives the following system of equations for the coefficients a,
b, c and d:
a < x2 > + d < xs > = < x Ëx >
(4.54}
d<xs>+b<
The solution oÎ this system oî equations gives a, b, c and d in terms
of the second moments < x2 >. < xs >. < s2 >. < z2 > and the yet
unknown terms < x Ë >. < s Ë >. < x Ë >. < s Ë > and < z Ë >. x x s s z In the following we express these unknown terms as Ïunctions oÎ the
second moments < x2 >. < xs >. < s2 > and < z2 >. For this we assume
that the charge distribution bas ellipsoidal symmetry: the charge
density then depends on only one parameter U as follows:
P = p(U}, (4.55}
In order to find solutions of the electric field we rotate the
coordinate frame over a yet unknown angle ~ in the horizontal plane
such that in the new frame the charge density takes the more simple
form:
(4.56)
The coordinates and the components oÎ the electric field in both
frames then are related as follows:
x = x cos ~ + ; sin ~ E = Ë cos ~ + Ë sin ~ x x s
s = -x sin ~ + s cos ~ Ë = - Ë sin~ + Ë cos ~ (4.57} s x s
z=z Ë = Ë z z
107

In order to find expresslons for the quantities A.B,C and ~we
ca.lculate the new second moments of tb~ charge distributton Eq.
(4.56). These new moments are related with the old moments via trams
formation Eqs. (4.57). The angle ~ is determined by the requirement
that in the new frame < xs > must vanish. We obtain the following
expresslons for ~.A,B,C:
2 < xs > = _.:,_:....:,:::....:,. __ < 5~~ > _ < x~~ >
(Aik)2 = l [< x2 > (1 + co! ~) + < $2 > (1 - co! ~)] (4.58)
(Bfk)2 = l [< x2 > (1 - co! ~ ) + < $2 > (1 + co! ~)]
(C/k)2 = < z2 >
Here the parameter k still depends on the precise choice of the
distributton and is defined by:
where h specifies the distributton with the normalization:
CIO
f h(r2 }r2 dr = 1. 0
(4.59)
(4.60}
Using transformation Eqs. (4.57) the averages in the non-rotated
frame < x Ë >, < x Ë >, < s E > and < s E > can be expressed in x s x s terms of the averages in the rotated frame as:
= < x Ë > cos2~ + < s Ë > sin2~ x s
-- -- 1 ,...,,.." ""'""' < x E > = < s E > = - -2 (< x E > - < s E >) si~ s x x s (4.61)
< s Ë > = s = < x Ë > sin2~ + < s Ë > cos2~ x s
lOS

The avèrages in the rotated frame <x Ëx > and < ';; Ë5
> now result
from the rotated charge distribution Eq. (4.56} and have been given
by Sacherer 25>. Using those results we find for the unknown terms:
-- -- I k B C k CA < s Ex > = < x Es> =- r [:r g <:r • :r> - B g (B. s>Jsintp COS<P (4.62) 0
s Ë > = I k B C sin2
<P + ~ g <i· ~) cos2 .p] < = r [:r g <:r. :r> s 0
< z Ë > = I k A B = reg <c · c> z 0
where I is the beam current averaged over one turn. The function
g{p.q} is defined by the integral eXPression:
(4.63}
The characteristic current I0
contains all the constants which appear
as aresult of the sealing transformation Eqs. (4.29} and as aresult
of the introduetion of the average current I in Eqs. (4.62). It is
defined as:
(4.64)
where n denotes the number of bunches per turn. The parameter À3 in
Eq. (4.64) still depends on the type of di~tribution chosen in Eq.
(4.56}. However, as bas been shown in Ref. 25, this dependenee is
very weak for practical distributtons and we can take À3 = 1/{5~) which corresponds toa uniform distribution. With this approximation
the coefficients of the potenttal function a,b,c and d are completely
specified in terms of the moments < x2 >. < xs >. < s2 > and < z2 >. Using Eqs. {4.62) the solution of Eqs. {4.54} becomes:
109

< ;a > < i Ëx > - < iS > < i Ëx > a=
< i 2 > < i Ës > - < iS > < i Ëx > b = ----------~------------~-
d = < iä > {a - b)
< ia > - < ;a >
(4.65)
For subsequent use in section 4.5 we calculate the field
energy of the bunch. The total electric field energy of a free charge
distributton is given by the integral:
(4.66)
where E is the electric field strength. Consider the following vector
relation between E and the position vector r, valid for any vector E
for which v x E = 0:
(4.67)
If we substitute this expression in Eq. (4.66) we can convert the
second term on the right hand side of Eq. (4.67) into a surface
integral which goes to zero. With v•E = p/e0
we obtain the following
general expression for the total field energy of a free charge
distribution:
Gil
W = fff (r•E)p dx = qN (< xE > + < s E > + < z E >) -Gil x s z
(4.68)
with q the charge of a partiele and N the total number of particles.
For the ellipsoidal charge distributton given in Eq. (4.55) this
expr~ssion for W can be reduced to the following form:
110

(4.69}
with A, Band C given in Eqs. (4.58} and 10
given in Eq. (4.64}. We
note that the magnetic field energy is also included in Eq. (4.69}.
Furthermore we note that this expression for W is invariant for
interchanges of A, B and C as it must be. As a third remark we note
that for A = B the integral in Eq. (4.69} can be calculated analy
tically and the result obtained agrees with the expression for the
field energy of a uniformly charged ellipsoid with rotational
symmetry as calculated by Hofmann and Struckmeier 26>. An alternative
expression for the field energy of the charge distributton is
obtained by adding the first, third and fourth of Eqs. (4.54}.
We then obtain with Eq. (4.68):
i = N(a < x2 > + 2d < xs > + b < s2 > + c < z2 >} (4.70}
This expression may be useful to calculate i in the numerical program
when a,b,c and d are already known.
The time-derivative of i is obtained by differentlation of Eq. (4.69)
with respect toA. Band C, foliowed by a differentlation of the
quantities A, Band C with respect to time using Eqs. (4.58). We find
the following expression for the time-derivative of i:
di N d - d -- d - d -dT = - 2 (a dT <xz> +2d dT < xs > +b dT < s2 > +c dT < z2 >) (4.71}
A similar result was obtained by Hofmann and Struckmeier 26} for an
ellipsoidal bunch with uniform density.
111

4.5. Iloment equa.tions
In section 4.3 we derived the time-dependent Hamiltonian H0
,
Eq. (4.31) for a partiele moving in tbe azimuthally varying magnette
field in tbe absence of space charge. In section 4.4 we defined tbe
potenttal lunetion i0
Eq. (4.51) for a buncb with ellipsoidal
symmetry and witb a linear approximation of tbe space charge forces •
. Tbe total Hamiltonian under space charge condi:tions H is found by
adding i0
to tbe unperturbed Hamiltontan:
- 1 - 1 - 1- -- 1 - --H = -p2 + ~0 (T)- a(T))x2 + ~2 - Tij(T)xp- -b(T)s2 - d(T)xs + 2 x 2":X 2s s 2
(4.72)
Substituting tbis Hamiltonian in Eq. (4.5} we obtain for tbe Vlasow
equation:
81 - 81 - - 81 - - - 81 - - 81 - + P - + (ps- TijX) -::- -((~ -a)x - Tijps - ds) -::- + (bs + dx) -::- + ~ x~ & ~ ~
- 81 - 81 + p -- (Q - c)z - = 0. z Bi z BPz
(4.73)
From tbis equation we obtain tbe second-moment equations as bas been
shown in section 4.2. In a system witb three degrees of treedom 21
independent second moments can be formed. However, since in our
linear approximation tbe vertical motion of a single partiele is not
coupled wi tb tbe horizontal motion, we do not have to consider cross
terms between horizontal and ver ti cal variables. We tben have ten
independent second moments for tbe horizontal variables and tbree for
tbe vertical variables. From Eq. (4.73) we derive the following
system of differenttal equations for the second moments:
112

= 2 < xpx>
= < p2 > - (0 - a) < x2 > + ~ < xp > + d < xs > x ~ s
= -2 (~ - a) < xpx > + 2 'TT) < ii,!5
> + 2 d < s Px >
= 2 < sps > - 2 'TT) < x; >
= < p2 > - ~ < xp > + b < s 2 > + d < xs > s s
= 2 b ( sp5
) + 2 d ( xP5
)
dd <xi> =<sii >+<iP >-'T1)<x2 > T X S
dd < p n > = -(0 -a}<xp > + 'TT) (p2) + d (sp > + b <sp > + d <iP > T rs ~ s s s x x
~T < xps > = < P,!s > + b < xs > + d < x2 >
~T < spx > = < P;s >--r1) < xpx >-(~-a}< xs >+ 'TT)( sps >+ d< s 2 >
=2<iP > z
= < p2 > - (Q - c} < z2 > z z
= -2(Q - c) < zP > z z (4.74}
The time-dependent quantities ~· Qz and 1) are specified in Eqs.
(4.26). (4.27} and (4.28) and the coefficients a,b,c and d are given
in terros of the second moments < x2 >. < xs >. < s 2 >. < z2 > via the
equations (4.58), (4.62) - (4.65). The system therefore forms a
closed set of differentlal equations for the second moments and can
be integrated numerically for a given set of initia! conditions. We
note that the equations for the horizontal and vertical moments are
mutually coupled due to the space charge effect, i.e. via the
coefficients a,b,c and d.
Furthermore we note that the three first order differenttal equations
for the vertical moments can be reduced to one second order
differentlal equation for the vertical RMS-envelope z = < z2 >~: m
(4.75)
113

where ë:z is the vertica.l RMS-emittance defined as:
(4.76)
Due to our Unear approximation of the space charge forces thts
RMS-emittance is constant as ca.n be verified with the latter three of
Eqs. (4.74). Equation (4.75) is of the same form as the RMS-envelope equations derived by Sacherer 2S) for linear accelerator structures.
In fact this equation is valid for the general case where the space
charge forces may have a non-Unear part. However. the problem then
lies in the fact that the RMS-emittance is no longer a constant. Recently. Hofmann and Struckmeier 2S) derived differenttal equations
which relate the change of the RMS-emittances to the change ot the
non-linear field energy in the bunch.
"' In sectien 4.3 we also derived the smoothed Hamiltonian H0
for an isochronous cyclotron as given in Eq. (4.47). This Hamiltonian "' was obtaine from the Hamiltonian H
0 Eq. (4.31) via a smoothing
procedure and via the canonieal transformation defined in Eqs.
(4.46} In principle these transformatlens have to be applied also on the electrio potenttal runetien defined in Eq. (4.51}. The trans
formation given in Eqs. (4.46) is a point transformation whtch leaves the electrio potentlal funetion unchanged.
A A
Note however that the secend moments whtch contain px and p8
will have a different meaning due to this transformation. As for the
smeething procedure we already noted tbat this transformation gives
only a small difference of the order of the flutter between the old
and new variables. We neglect the change of the potenttal function
due to this transformation. As a consequence the moment equations A
resulting from the smoothed Hamiltonian H0
are less accurate than the system given in Eqs. (4.74). On the other band these equations may give·extra insight in the problem. The equations for the vertica.l
moments remain the same as in Eqs. (4.74) but with Q (T) replaced by 2 z
the average value 1.1 • For the horizontal moments we find the z following system of equations:
114

d A A""
dT < s2 > = 2 <sps) - vx <xs>
~T < ;;s > = <;!> - ~ (v~- 4b} <;2 > - ~ vx(<xps> + <spx>) + d<xs> d A AA 1 AA AA
dT < P: > = -vx <Px_Ps> - 2 (v~ - 4b} <sps) + 2d <xps>
d AA 1 A A AA AA
--d < xs ) = -2 v ( <s2 )- <x2 >} + <xp > + <sp > (4.77) T X S X
d A A 1 A A 1 AA
dT < Px_Ps> = 2 vx(<p!> - <p~>} - 4 (v~- 4a) <xps) + 1 AA AA AA
- ~4 v2 - 4b) <sp ) + d(<xp )+<sp >) x x x s d AA A A 1 AA AA 1 AA A
--d < xp > = <p n > + -2 v (<sp > - <xp >) - -4 (v2 -4b)<xs> + d<x2)
T s rs x s x x d AA A A 1 AA AA 1 AA A
--d < sp > = <p n >+ -2 v (<sp > - <xp >) - ~4 v2 -4a)<xs)+ d< s2 > T x rs x s x x
If we substract the latter two of Eqs. (4.77) and use the
relation between a,b and das given in Eqs. {4.65) we find that the
quantity
[ = N(< spx > - < xps >) {4.78)
is an integral of motion. In fact this means that in the final A
coordinate system for which the unperturbed Hamiltonian H0
is
time-independent, the total angular canonical momentum of the bunch
is conserved. We note that this result not only holds for an
ellipsoidal charge distribution but for any charge distributton with
non-linear space charge forces. (In this more general case we have:
dLtdr = - N (< ; 8~1~ >) - < ; Öf/8; >) = 0). The kinetic energy of a single partiele in the bunch is equal
"" to the Hamiltonian H as given in Eq. (4.47). Thus, for the total 0
kinetic energy T of the bunch we have:
(4.79)
115

and for the time-derivative of T we obtain with Eqs. (4.77):
dTd- = !!2 [2a ~ > + 2b <;; > + 2c <;; > + 2d ( <;; > + ~ >)] T X s Z X S
N d A d AA d A d A = - [a - <xa> + 2d - <xs> + b - <s2 > + c - <za>] 2 dT dT dT dT
Comparing this expression with the time-derivative of the field
energy as given in Eq. (4.71} we find that for the final A
(4.80)
time-independent Hamiltonian H0
, the total energy Ü of the bunch:
(4.81}
is conserved.
Apart from the total angular momentum of the bunch r and the
total energy of the bunch Ü there is a third integral of Eqs. ( 4. 77) namely the quantity
AA A A AA AA ~
+ 2((xs) (p D ) - {xp ) (sp ))) X'S S X
(4.82)
For an uncoupled canonical system each of the three terms < ;a > < pa > _ < ;; )2 < ;a ) < ;a ) _ < ;; )2 and
x x • s s
< xs > < Px:Ps > - < xp8
> < spx > is conserved where the first term corresponds with the transverse emittance and the second term with
the longitudinal emittance. For a coupled system only the sum of
these three terms is conserved. We note that the quanti~ e is not
only a constant for the system Eqs. (4.77) but for all linear
canonical systems wi th two degrees of freedom and arbi trary coupling.
It can easily be verified that it is an integral of motion of Eqs. (4.74) also.
According to Liouville's theorem the total volume occupied by
the particles in phase space is conserved. For a system with one
degree of freedom the RMS-representation of the phase space area
takes the form as given in Eq. (4.76). Fora system with two degrees
of treedom we find the following expression for the RMS-representa
tion of the four-dimensional pbase space volume:
116

(4.83)
A AA A
+ 2 [<x2 > <sps> <pxPs> <spx> + <s2 > <xpx> (pxPs> <xps> +
A A -
+ < p~> {sp5
) <xs> {xps> + <p!> {xpx) <xs> <spx>] +
AA AA A A AA AA AA AA M - 2[<xpx> <sps> <xs> {pxPs> + <xpx> {sps {xps) <spx>]}
The quantity T is conserved for all linear canonical systems with
two degrees of freedom and arbitrary coupling.
A special solution of the system Eqs. (4.77) is obtained if
we consider bunches which have rotational symmetry with respect to
the vertical axis through the bunch, i.e. bunches with a circular
horizontal cross section. In order to obtain this salution the
moments have to be chosen as follows:
< sps > = < xpx >
< xs > = < PxPs > = 0 (4.84)
The moment equations for the circular bunch can be reduced to two
second order differential equations for the horizontal and vertical
RMS-envelopes ~m = < ~2 >~ and ;m = < ; 2 >~:
z (1. ..... m) = 0.
xm A A
d2 z é2 x x __...!!. + 1)2 z I 1 ( ..... m • ..... m) =0 z - --... - - r A"" g dT2 z m 16 z3 o z2 z z m m m m
with I the average beam current and the function g defined in
Eq. (4.63).
(4.85)
117

Another special solution of the system Eqs. (4.77) is the
stationary solution. This solution is obtained by putting the
right-hand-sides of the equations equal to zero.In doing so one finds A AA A A
tbat the moments < x2 >, < xs >, < s2 > and < z2 > can be chosen
freely and that all other moments can be expressed in terms of
< ; 2 >. < ;;·>. < ;2 > and < ; 2 >.We note however that, under space
charge conditions, only the stationary solution for the circular
bunch is physically realistic.
For non-eireular stationary bunches one finds that physical
quantities which have to be positive {like for example the second - A A~ 1 A
moment < p~ > el < p~ > + ux < spx > + 4 v~ < s2 >) become negative;. in view of the rotational symmetry of the unperturbed Hamiltonian H
0 it is not so surprising that non-rotational symmetrie solutions
cannot be stationary.
In the figures (4.1) - (4.3) we illustrate some results
obtained wi tb the smoothed moment equations {Eqs. 4. 77) for the
minicyclotron ILEC 49>.which is under construction at the Eindhoven
Univers i ty. The calculat1ons were done for a coasting beam making
four turns at a nomina! radius of 10 cm
{B(r0
) = 1.42 T, vr = 1.0004, vz = 0.1861, E = 0.97 MeV) with an average beam current I of 1 mA and two bunches per turn. The ini tial
values of the moments were taken such that the beam would be
stationary if there would be no space charge effect. The integrals of A A
motion were taken as follows: 6 = 6 = 10 mmmrad, LIN = - 50 mmmrad, ,.. 2 z T = 6.45 {mmmrad) • Figure 4.1 shows the time-evolution of the
A A A
RMS-sizes of the bunch xm' sm and zm during the four turns. The
relatively strong increase of the horizontal beam-size is due to
the rotation of the bunch around its vertical axis. Figure 4.2
depiets the RMS rotation-angle ~ of the bunch as defined in Eqs. . - ~
(4.58) and the longitudinal momentum spread 6 = 2 < P! > = " ,..,. 1 " ~
el 2(< p2 > + v < xp > + -4 v2 < x2 >) • s x s x
Under the assumed conditions the momentum spread increases with ca.
0.3% per turn and the rotation-angle ~ with ca. 3 degrees per turn.
In Fig. 4.3 we give the average kinetic energy in the bunch TIN as
defined in Eq. {4. 79) and the average space charge energy in the
bunèh WIN as defined in Eq. (4.70}.Both quantities are normalized
118

E E
til N ïii ..c V c: :1 .0
0
tz •Ê •10 mmmrad
i • 6.451 mmmrad )2
i IN • -so mmmrad
turns 3 4
Fig. (4.1): The RMS-sizes of a 1 mA/0.97 MeV coasting beam making four turns in the minicyclotron ILEC; calculated numerically with the smoothed moment equations, Eqs. (4.77)
with respect to the nominal energy,of the particles E = 0.97 MeV. It
can be seen from this figure that there is an exchange between the
two forms of energy but the total energy ÜIN is conserved.
Finally we note that we made the same calculations as described above
with the non-smootbed system given in Eqs. (4.74). The initial values
of the old moments, needed for the integration of Eqs. (4.74) were
calculated from the initial values of the new moments by applying the
transformation given in Eqs. (4.46) which relates both systems if one
neglects the smoothing transformation. Under the assumed conditions
the deviation between the results obtained with both systems of
moment equations was in general less than one per cent.
119

15 Êz•Ê •10mmmrad
t•6.4S lmmmradJ2
Ï.IN .. -SOmmmrad
~ ,_ oO 1.0 "CC
"" .[ 111
e ::I .... c <» e Q e
o.s
0 2 turns
3
1S
g. o:S
9-<»
15> c RI
c Q
:;:::
"" 15 ... 5
4
Fig. (4.2): The RMS rotation-angle ~ (Eqs. 4.58) and the logitudinal momenturn spread 6 of a 1 mA/0.97 MeV coasting beam in the minicyclotron ILEC as calculated with Eqs. (4.77).
4.6. Conclusion
We have derived moment equations for the partiele distribu
tion of a hunebed beam in an AVF cyclotron. Wi thin the approximations
made, the numerical integration of these equations will give the
time-development of the RMS-properties of the bunch under space
charge conditions. The most important approximations in our model are
the assumption of an ellipsoidal charge distributton and that of
linear space charge forces. For linear accelerator structures the
assumption of an ellipsoidal charge distributton seems to be a good
approximation in practice 25•26>. For the AVF cyclotron this
assumption is not trivia! because of the coupling between the
transverse and longitudinal variables in the unperturbed Hamiltonian.
120

In the multi-partiele code used at GANIL the bunch is simulated by a
Gaussian ellipsoidal distribution and the results obtained with this
code seem to be satisfactory 23>. On the other hand Adam 29) found
numerically that under certain conditions the bunch shape starts to
deviate considerably frcm the ellipsoidal shape. The choice of the
initia! distribution, the energy of the particles and the average
beam current seem to be important factors in this aspect. As for our
second assumption we note that in linear accelerator structures the
non-linear parts of the space charge forces are responsible for RMS
emittance growth. For not too high beam currents this effect could be
neglected in a first approximation. However, in an AVF-cyclotron the
non-linear part of the electric field will be determined first of all
by the deviation between the actual geometrical bunch shape and the
ellipsoidal shape. Therefore r.e expect that the validity of the
second assumption mainly depends on the accuracy of ~1e first assump
tion. We conclude that the possibilities and the restrictions of the
model presented in this paper should be further evaluated by campa
ring the results with numerical many-particle calculations.
"' IC> ...><
.... en ,_ Cll c: Cll
Cll en 10 :;; > 10
12.-------,-------.--------.-------.
DIN
I IN •-50 mmmrad
0 4 turns
Fig. (4.3): The ave~age kinetic energy TIN (Eq. 4.7~). space charge energy WIN (Eq. 4. 70} and total energy UIN (Eq. 4.81) of a 1 mA/0.97 MeV coasting beam in the minicyclotron ILEC as calculated with Eqs. (4.77). The energies are normalized with respect to the nomina! energy of the particles, E = 0.97 MeV.
121

122

5. roNa..uDING REMARKS
In the centre of a cyclotron the magnetic vertical focussing
usually goes to zero. In tbat case the vertical stability in
the centre bas to be provided by electric focussing. A good measure
for the vertical electric focussing properties of the central region
can be obtained from the acceptance in the vertical pbase space. This
acceptance bas to be calculated for different R.F. starting pbases of
the particles (see section 2.4 and also Ref. {lS)).
A metbod to compensate for the horizontally defocussing
effect of the fringing field on the extracted beam is the application
of a passive magnette focussing channel. An advantage of this metbod
is tbat the field produced by the channel can be calculated analy
tically if it is assumed tbat its components are uniformly magne
tized. This opens the possibility to optimize the sbape and arrange
ment of the iron bars in the channel analytically (see section 2.4).
The flattopping technique provides an adequate tooi to
produce an extracted beam with low energy spread, without cutting
away large parts of the longi tudinal phase space. For ILEC the
allowable RF pbase acceptance for an energy spread less than 0.1% is
eXpected to be more than five times larger due to the flattopping. To
achieve this the pbase of the flattop voltage should be stabie within
0.1° (geometrical degrees) (see section 3.4.3).
As compared to the theory for the non-accelerated motion
given by Ragedoorn and Verster 12>. the treatment given in this
thesis is more general because i) it includes not only the radial but
also the longi tudinal motion, ii) i t immediately gives the condition
for isochronism and iii) it is presented in such a form tbat
acceleration can be included (see section 3.3).
The electric gap crossing resonance occurs for a 3-fold
rotational symmetry of the magnetic field combined with a one-dee
system, a 3-fold rotational symmetry combined with a two-dee system
123

(push-push as well as push-pull} and also for a 4-fold rotational
symmetry combined with a three-dee system. The resonance is not
present fora 3-fold symmetry combined with a three-dee system and
not for a 4-fold symmetry wi th a one-dee system or a two-dee system
(see section 3.5}.
The interterenee between the geometrical shape of tbe
dee-structure and the flutter profile of the magnetic field may
introduce a resonance which affects the central position phase in a
similar way as a non-isochronous magnetic field. This resonance may
occur for example in case of a 3-fold symmetrie magnetie field
eombined with a 3-dee system and also in case of a 4-fold symmetry
combined with a 1-dee system or a 2-dee system. For ILEC this effect
is not so important. However, for a cyclotron with spiral dees and
spiral pole tips the phase shift may become several degrees. For high
harmonie mode numbers such a phase shift is no longer negligible (see
seetion 3.5}.
The analytically calculated orbit centre motions of
non-accelerated as well as accelerated particles are in good
agreement with the results obtained from numerical orbit calculations
(see sections 3.3 and 3.4).
Within the approximations made the numerical integration of
the moment equations as derived in chapter 4 gives the time-evolution
of the RMS-properties of the bunch under space charge conditions. A main advantage of the method is that the numerical integration will
ask for much less computer time as compared to multi-partiele codes
(chapter 4).
As a first approximation, the assumptions made in the
derivation of the moment equations (i.e. linear space charge forces
and a charge distributton with ellipsoidal symmetry) do not seem to
be unreasona.ble. Therefore we expect that the model can give a useful
contributton to the study of space charge effects in an AVF
cyclotron. Nevertheless the possibilities and restrictions of the
model should be further evaluated by oomparing the results with
numerical multi-partiele calculations(chapter 4}.
124

In a linear canonical system with two degrees of freedom and
arbitrary coupling the RMS-representation of the 4-dimensional phase
space volume as given in Eq. (4.83) is conserved.
In a coupled linear canonical system with two degrees of
freedom the RMS-representation of the emittances for each of the two
degrees of freedom is in general not conserved. However, the
"combination" of the square of the emittances as given in Eq. (4.82}
is conserved.
In the final coordinate system in which the oscillating
behaviour of the unperturbed Hamil tonian has been removed (smoothing
procedure), the total energy of the bunch under space charge
conditions is conserved. The same is true for the total angular
canon1cal momenturn in the bunch (see section 4.5).
125

126

REFERENCES
1) Lawrence, E.O. and Edlefson, N.E., Scienee 72 {1930) 376.
2) Wilson, R.R., Phys. Rev. 53 {1938) 408.
3) Kerst, D.W. and Serber, R., Phys. Rev. 60 {1941) 53.
4} Bethe, H.A. and Rose, M., Phys. Rev. 52 (1937) 1254.
5) Thomas. H •• Phys. Rev. 54 {1938) 580.
6) Heyn, F.A. and Khoe Kong Tat, Rev. Sci. Instr. 29 (1958) 662.
7) Heyn, F.A. and Khoe Kong Tat, Seetor-Foeussed C,yclotrons, Proc.
Conf. Sea Island, Georgia 1959, pp. 29-39.
8) Symon, K.R., Kerst, D.W .• Jones, L.W., Laslett, L.J. and
Terwilliger, K.M .. Phys. Rev. 103 (1956} 1837.
9) Laslett, L.J., Science 124 (1956) 781.
10} Kerst, D.W., Proc. CERN Symp .• Geneva 1956, p. 366.
11) Smi tb, L. and Garran, A.A .• U<l..RL 8598 (1959).
12) Hagedoorn, H.L. and Verster, N.F .• Nucl. Instr. Meth. 18. 19
(1962} 201.
13) Schulte, W.M .• Thesis, Eindhoven Univ. Technology, 1978,
Eindhoven.
14) Schulte, W.M. and Hagedoorn. H.L •• Nucl. Instr. Meth. 171 (1980)
409.
15) Schul te, W.M. and Hagedoorn, H.L., IEEE Trans. Nucl. Science 26,
2 (1979} 2329.
16) Gordon, M.M., Partiele Accelerators 14 (1983) 119.
17) Gordon, M.M., IEEE Trans. Nucl. Science 13, 4 (1966) 48.
18} V~ Nieuwland, J.M •• Thesis Eindhoven Univ. Technology,
1972, Eindhoven.
19} Schulte, W.M. and Hagedoorn, H.L., Nuel. Instr. Meth. 171 {1980)
439.
20} Schryber, U., Proc. 10th Int. Conf. on C,yclotrons and their
Applications. East Lansing, USA, 1984, pp. 195-202.
21} Baartman, R. et. al., Proc. 10th Int. Conf. on C,yclotrons and
their Applieations, East Lansing, USA, 1984, pp. 203-206.
22) Jongen, Y •• Proc. 10th Int. Conf. on cYclotrons and their
Applications, East Lansing, USA, 1984, pp. 465-468.
127

23} Baron, E., Beek, R., Bourgarel, M.P., Bru, B., Chabert, A.,
Ricaud, C., Proc. 11th Int. Conf. on cyclotrons and their
Applications, Tokyo, 1996, pp. 234-237.
24} Kapchinsky, I.M. and Vladimirsky, V.V., Proc. Int. Conf. on High
Energy Accelerators and Instrumentation, CERN, 1959, pp. 274-288.
25} Sacherer, F.J., IEEE Trans. Nucl. Science, 18 (1971} 1105.
26) Hofmann, I. and Struckmeier, J., Partiele Accelerators 21 (1987}
69.
27} Adam. S., Thesis, Eidgenössischen Technischen Hochschule, Zürich,
1985, Diss. ETH Nr. 7694.
28} Gordon, M.M., Nucl. Instr. Meth. 18, 19 (1962} 268.
29} Adam, S., IEEE Trans. Nucl. Science 32 (1985} 2507.
30} Lapostolle, P.M., IEEE Trans. Nucl. Science 18 (1971} 1101.
31} Prins, M. and Hofman, L.J.B., Nucl. Instr. Meth. 181 {1981) 125.
32} Botman, J. I.M. and Hagedoorn, H.L., IEEE Partiele Accelerator
Conference, Washington, D.C., 1987, vol. 1, pp. 488-490.
33) Bennett, J.R.J., Proc. 1st Int. Conf. on Ion Sources, Saclay
(1969) pp. 571-585.
34} Verster, N.F., Hagedoorn, H.L., Nucl. Instr. Meth. 18, 19 (1962}
327.
35) Courant, E.D., Snyder, H.S., Annals of Physics ~ (1958) 1.
36) Hazewindus, N., van Nieuwland, J.M., Faber, J. and Leistra, L.,
Nucl. Instr. Meth. 118 (1974} 125.
37) Botman, J.I.M., Thesis, Eindhoven Univ. Technology, 1981,
Eindhoven,
38} Houtman, H., Kost, C.J., Paperpresentedat the EPS Conference on
Computing in Accelerator Design and Operation, Berlin, September
20-23, 1983, TRI-pp-83-95.
39} Nieuwland, J.M. van, Hazewindus, N., IEEE-Trans. NS-16, 3 (1969)
454.
40} McCa.ig, M., Permanent Magnets in Theory and Practice, Pentech
Press, London, 1977.
41} Kramer, P., Hagedoorn, H.L. and Verster, N.F., Proc. Int. Conf.
on Sector-Focused cyclotrons and Meson Factories,·CERN report
63-19, (1963), pp. 214-221.
42) Blosser, H., et.al. Proc. 11th. Int. Conf. on cyclotrons and
their Applications, Tokyo, 1996, pp. 157-167.
128

43) Acerbi. E .• et.al., Proc. 11th Int. conf. on Cyclotrons and their
Applications, Tokyo, 1986, pp. 168-175.
44) Galès, S., Proc. 11th Int. Conf. on Cyclotrons and their
Applications, Tokyo, 1986, pp. 184-190.
45) Gordon, M.M., Nucl. Instr. Meth. 169 (1980) 327.
46) Steeman. P.A.M., Eindhoven University of Technology, Internal
report VDF-NK 85/22 {1985).
47) Kranenburg, A.A. van, Hagedoorn, H.L., Kramer, P .• Wierts, D .•
Proc. Int. Conf. on Isochronous Cyclotrons, Gatlinburg,
Tennessee, 1966, IEEE Trans. on Nucl. Sci. NS-13,4 {1966)
pp. 41-47.
48) Kleeven, W. J .G.M., Botman, J. I.M. and Hagedoorn, H.L.,
Proc. llth Int. Conf. on cYclotrons and their Applications,
Tokyo, 1986, pp. 256-259.
49) Heide, J.A. van der, Kruip, M.J.M .• Magendans, P ••
Genderen, W. van, Kleeven, W. and Hagedoorn, H.L., Nucl. Instr.
Meth. A240 (1985) 32.
129

130

In this thesis two main subjects are studied. The first deals
with the motion of accelerated particles in an AVF cyclotron. A
general Hamiltonian theory is derived for the simultaneous treatement
of the transverse and the longitudinal motion and the coupling
between both motions. The transverse motion is represented by the
coordinates of the orbit centre and the longitudinal motion by the
energy and the central position phase of the particle. The derfvation
of the Hamiltonian combines two theories developed earlier in our
group, namely the theory for non-accelerated particles of Hagedoorn
and Versterand the theory for accelerated particles of Schulte and
Hagedoorn. The first is reformulated and generalized such that i) not
only the radial but also the longitudinal motion is included and ii)
acceleration can be incorporated in a general manner. The treatment
of acceleration bas been generalized such that muiti-dee systems and
spiral-shaped dees could be included and different dee-systems could
be treated simultaneously. Also flattopping bas been incorporated in
the formalism. The derfvation of the theory includes the azimuthally
varying part of the magnette field (the flutter) in a general and
conventent manner. The theory therefore also describes phenomena
which are due to the interfering influences of a given geometrical
shape of the dee-structure and the flutter. An example of this is the
well-known electric gap crossing resonance. We find that also another
resonance which affects the central position phase, may occur in case
of a 3-fold symmetrie magnette field combined with a 3-dee system and
also in case of a 4-fold symmetry combined with a 1-dee system or a
2-dee system. The final Hamiltonian derived, provides differenttal
equations which can be solved by simple and very fast computer
programs.
The second main part of this thesis deals with the effect of
space charge in an AVF cyclotron. We represent the properties of the
bunch, like the sizes, emittances and momenturn spread, in terms of
the second order moments of phase space distributton function and
derive two sets of differentlal equations which describe the
131

time-evolution of these moments under space charge conditions. The
model takes into account two special features of an AVF cyclotron. The
Urst is the coupling between the longi tudinal and the radial mot ion.
This coupling. which exists in all circular accelerators. is due to
dispersion in the bending magnets. The second special feature of an
AVF cyclotron is given by the fact that, in the ideal case, the
revolution frequency of the particles is independent of their energy
(isochronism). A consequence of this is that there is no RF focussing
in the longitudinal pbase space to counteract the repulsive longitu
dinal space charge force. The first system of moment equations
derived is valid in principle for all types of circular accelerators
in the sense that it takes into account the dispersion effect. For
the derivation of the second system we make the extra assumption that
the magnette field is perfectly isochronous. Moreover, we apply a
smoothing procedure which removes the oscillating behaviour of the
external azimuthally varying forces. The derivation used is an
application of the RMS-(Root Mean Square)approach in which only the
linear part of the space charge forces, as determined by a least
squares method. is taken into account and in which the charge
distributton is assumed to possess ellipsoidal symmetry. Due to the
longitudinal-tranàverse coupling the RMS-emittances in both direc
tions are not constant in spite of the linear forces assumed.
However. we present a "combination of emi ttances" which turns out to
be constant for all linear canonical systems wi tb two degrees of
freedom and arbitrary coupling. Moreover. we give a constant of
motion of the moment equations which represents the RMS-value of the
4-dimensional horizontal phà.se-spacé volume. We also show that for
the smoothed moment equations the total energy-content of the bunch
and the total angular canonical momentum is conserved.
The analytica! moeiels developed, can be applied to a given
cyclotron by adopting the relevant parameters. In this thesis some
calculations are made for the small 3 MeV Ïsochronous Low Energy
Qyclotron ILBC which is presently under construction at the Eindhoven
Univers i ty. An important part of tb is study was started in re lation
with ILBC and therefore we also give some attention to the
construction of this machine.
132

SAXENVATIING
In dit proefschrift komen twee hoofdonderwerpen aan de orde.
Het eerste behandelt de versnelde beweging van ionen in een AVF
cyclotron. Met behulp van het Hamilton formalisme wordt een algemene
theorie opgesteld voor de gelijktijdige beschrijving van de
gekoppelde transversale en longitudinale beweging. De transversale
beweging wordt beschreven m.b.v. de coördinaten van het baancentrum:
de longitudinale beweging m.b.v. de energie e~ de centrale positie
fase.
In de afleiding worden twee theorieën samengevoegd, namelijk de theo
rie voor de niet-versnelde beweging, ontwikkeld door Ragedoorn en
Verster, en de theorie voor de versnelde beweging van Schulte en
Hagedoorn. De eerste is zodanig gegeneraliseerd dat behalve de radia
le ook de longitudinale beweging beschreven wordt en dat versnelling
op een doeltreffende manier toegevoegd kan worden.Daarnaast is Schui
te's theorie voor de versnelde beweging gegeneraliseerd zodat ook
muiti-dee systemen en spiraalvormige dees behandeld kunnen worden.
Ook "flattopping" is in het formalisme ingebouwd.
Het azimutaal variërende deel van het magneetveld ("flutter"} wordt
vanaf het begin in de afleiding ingebouwd. De theorie beschrijft
daarom ook effecten die het gevolg zijn van interfererende invloeden
van een gegeven vorm van de dees en de flutter. Een bekend voorbeeld
hiervan is de "elektrische gap-crossing resonantie". Het blijkt dat
nog een andere resonantie op kan treden die, net als een niet
isochroon magneetveld, de centrale positie fase beïnvloedt. Zo'n
resonantie kan optreden voor een 3-voudig symmetrisch magneetveld
samen met een 3-dee systeem en ook voor een 4-voudige symmetrie
gecombineerd met een 1-dee systeem of een 2-dee systeem. De uit
eindelijk verkregen Hamiltoniaan levert bewegingsvergelijkingen die
met een eenvoudig rekenprogramma zeer snel opgelost kunnen worden.
Het tweede hoofdonderwerp gaat over het effect van ruimtela
ding in een AVF cyclotron. In dit proefschrift worden twee stelsels
van differentiaalvergelijkingen afgeleid voor de beschrijving van de
tweede-orde momenten van de faseruimteverdeling. Deze momenten vormen
een goede maat voor enkele belangrijke eigenschappen van een ladings-
133

pluk (bunch) zoals afmetingen, emittanties en impulsspreiding.
In het model worden twee bijzondere kenmerken van een AVF cyclotron
verwerkt. Het eerste bijzondere kenmerk is de koppeling tussen de
longitudinale en de radiale beweging. Deze koppeling bestaat in elke
circulaire versneller en is het gevolg van de impuls-dispersie in de
afbuigmagneten. Het tweede bijzondere kenmerk is dat de omloop
frequentie onafhankelijk is van de energie van de ionen (isochronie).
Een gevolg hiervan is dat er geen RF-focussering bestaat die de
afstotende longitudinale ruimteladingskrachten in de bunch tegen
werkt.
Het eerste stelsel differentiaalvergelijkingen dat afgeleid wordt is
in principe toepasbaar op elke circulaire versneller omdat het
dispersie-effect in rekening is gebracht. In de afleiding van het
tweede stelsel wordt verondersteld dat het magneetveld perfect
isochroon is. Bovendien wordt hierbij een "gladstrijk-procedure"
uitgevoerd waarmee de invloed van het snel-oscillerende gedrag van de
externe, azimutaal variërende krachten geëlimineerd wordt. In de
afleiding wordt de RMS {Root Mean Square} techniek toegepast. Alleen
het lineaire deel van de ruimteladingskrachten wordt in rekening
gebracht. Dit deel wordt bepaald m.b.v. een kleinste kwadraten
methode. Van de ladingsverdeling in de bunch wordt verondersteld dat
deze ellipsoïdale symmetrie heeft. Ondanks de lineair veronderstelde
krachten zijn, vanwege de longitudinale-transversale koppeling, de
RMS-emittanties in beide richtingen niet constant. In dit
proefschrift wordt echter een "combinatie van emi ttanties" gegeven
die constant blijkt te zijn voor elk gekoppeld lineair canoniek
systeem. Bovendien wordt een bewegingaeonstante gegeven die
overeenkomt met de RMS-waarde van het 4-dimensionale horizontale
fasevolume. Tevens wordt aangetoond dat voor het "gladgestreken"
systeem de totale energie-inhoud van de bunch en het totale canonieke
impulsmoment in de bunch behouden zijn.
De ontwikkelde analytische theorieën kunnen in principe op elk
cyclotron toegepast worden. In dit proefschrift worden enkele resul
taten gegeven van berekeningen. uitgevoerd voor het 3 MeV minicyclo
tron ILEC (Isochroon Laag Energie cyclotron). Dit cyclotron wordt
momenteel gebouwd aan de TUE. Omdat een belangrijk deel van het
beschreven onderzoek werd uitgevoerd in relatie met ILEC, wordt
tevens enige aandacht aan de constructie van deze machine besteed.
134

NAWOORD
Het in dit proefschrift beschreven onderzoek is uitgevoerd in de
groep Qyclotrontoepassingen van de Faculteit der Technische Natuur
kunde aan de Technische Universiteit Eindhoven.
Tijdens de onderzoekperiode zijn P.A.M. Steeman, J.J.M. Schlangen
en R.J.L.J. de Regt afgestudeerd op onderdelen van de in dit proef
schrift beschreven studie.
De studenten J.H.A. v.d. Akker en M.j.J. Vrakking hebben belang
rijke bijdragen geleverd in de vorm van stagewerk.
Ir. R.J.L.J. de Regt en Ir. M.J.M. Kruip zijn ook na het behalen
van hun ingenieurs examen betrokken geweest bij het ILEC project. Ik
ben hen zeer erkentelijk voor de plezierige samenwerking en ook voor
hun onmisbare steun op het gebied van numerieke baanberekeningen.
Dr. Y.K. Batygin van het Technisch Fysisch Instituut in Moskou
is, op grond van een uitwisselingsprogramma Nederland-Sowjet Unie,
gedurende een jaar als gast werkzaam geweest binnen onze groep. De
plezierige discussies met hem vormden een belangrijke stimulans bij
de ontwikkeling van de in hoofdstuk 4 beschreven ruimteladingstheorie
Ook wil ik speciaal vermelden de plezierige en stimulerende
discussies met Dr. J.I.M. Botman over cyclotrons en andere
versnellers.
Tevens gaat mijn dank uit naar Ing. W. Verseijden voor de
geleverde soft-ware ondersteuning bij het uitvoeren van de
magneetveld metingen
In het bijzonder bedank ik Dr. ir. J.A. van der Heide voor de
prettige wijze van samenwerken, met name in het kader van het ILEC
project.
De illustraties in dit proefschrift zijn tot stand gekomen met de
medewerking van mevr. M.C.K. Gruijters en de hr. P. Magendans. Bij de
uiteindelijke verwerking van de text heb ik zeer belangrijke hulp
gehad van mevr. J. Damsma. Ook hiervoor mijn hartelijke dank.
Tenslotte spreek ik mijn dank uit aan alle personen in het
cyclotrongebouw voor de prettige werksfeer gedurende de afgelopen
vier jaar.
135

LEVENSLOOP
5 augustus 1956
21 juni 1973
lS juni 1976
16 mei 1984
vanaf 1 juni 1984
136
Geboren te Horst
Eindexamen MAVO. R.K. Mavoschool. Horst.
Eindexamen AtheneumBaan de Kath. Scholen
gemeenschap ''Jerusalem" te Venray.
Doctoraal examen Technische Natuurkunde aan de
Technische Universiteit te Eindhoven.
Wetenschappelijk ambtenaar in tijdelijke
dienst, Fac. der Technische Natuurkunde,
Technische Universiteit te Eindhoven.

STEUINGEN
1
De gevoeligheid van ionisatiekamers voor de calibratie van de acti
viteit van radiofarmaca is vaak relatief laag in het belangrijke
energiegebied tussen 100 en 500 keV. Door een dun laagje lood (of een
ander metaal met hoog atoomnummer) op de inwendige elektrode aan te
brengen kan de gevoeligheid rond 350 keV aanzienlijk verhoogd worden.
W.j.G.M. Kieeven en G.P.J. Wijnhoven, Nucl. Instr. Meth. Phys. Res.
A237 ( 1985) 604
2
De responsie van ionisatiekamers voor decalibratie van de activiteit
van radiofarmaca kan voor sommige radionucliden nogal afhangen van de
fysische en geometrische vorm van het preparaat en van de positie van
het preparaat in de detector. Aangezien het voor patiënten van belang
is dat zij zo weinig mogelijk aan radioactiviteit worden blootgesteld,
dienen nauwkeurige specificaties voor deze calibratiemethode te worden
vastgesteld.
3
Bij het ontwerpen van bundelgeleidingssystemen voor axiale injectie in
een cyclotron is het van belang rekening te houden met eventuele
correlatie tussen de beide transversale faseruimten. Deze correlatie
kan ontstaan in het axiale magneetveld van de bron of dat van het
cyclotron zelf.
J.I.M. Botman, H.L. Hagedoorn, bijdrage aan de eerste Europese
Deeltjes Versnellers Conferentie EPAC , Rome, 7-11 juni 1988.
4
Bij een geschikt gekozen bekrachtiging van elk van de vier polen van
een quadrupooi kan hiermee een bundel geladen deeltjes gelijktijdig
gefocusseerd en afgebogen worden. Met behulp van conforme afbeelding
kan, in het geval van hyperbolische poolvorm, quantitatieve informatie
verkregen worden over het magneetveld in een aldus bekrachtigde
quadrupoo 1 .

5
In een isomagnetische opslagring voor geladen deeltjes met recht
hoekige homogene magneten wordt de evenwichts-energiespreiding in de
bundel die ontstaat als gevolg van quanturn emissie, uitsluitend
bepaald door de kromtestraal en de afbuighoek van de magneten en niet
door de optische functies of de lengte van de ring.
J.A. Uythoven, J.I.M. Botman en H.L. Hagedoorn, bijdrage aan de eerste
Europese Deeltjes Versnellers Conferentie EPAC , Rome, 7-11 juni 1989.
6
Voor toepassing ten behoeve van een experiment verdient het aanbeve
ling om bij atomaire niveauschema's (Grotrian-diagrammen) niet alleen
de relatieve lijnsterkte, maar tevens de relatieve overgangswaar
schijnlijkheid aan te geven, omdat de overgangswaarschijnlijkheid een
direkt te meten grootheid is.
7
Bij de produktie van het radionuclide fluor-18 door middel van
bestraling van water met protonen, ~e-kernen of a-deeltjes kan de
vorming van radiolyseprodukten aanzienlijk worden beperkt door
chemische verontreinigingen in het water zoveel mogelijk te vermijden.
G.R. Oloppin en J, Rydberg. Nuclear Olemistry, Theory and
Applications. Pergamon Press, 1980
W.J.G.M. Kieeven Eindhoven. 19 augustus 1989