Embed Size (px)
Citation preview

The Borel-Weil Theorem
Pieter T. Eendebak
March 5, 2001

Contents
Introduction 2
1 Holomorphic vector bundles 3
1.1 Vector bundles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Complex function theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Holomorphic vector bundles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Trivial vector bundles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.5 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Induced representations 12
2.1 Associated fiber bundles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2 Induced representations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3 Induced picture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 The Borel-Weil Theorem 18
3.1 Construction of a representation with highest weight λ . . . . . . . . . . . . . . . . 183.2 Complexification of groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3 Weights and characters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.1 Weights . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.3.2 Dominant weights . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.3.3 Extending characters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3.4 Line bundles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 Highest weight space of irreducible representations . . . . . . . . . . . . . . . . . . 233.5 Orbit structure on GC/B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.6 The Borel-Weil theorem for SL(n,C) . . . . . . . . . . . . . . . . . . . . . . . . . . 253.7 The Borel-Weil theorem in the general case . . . . . . . . . . . . . . . . . . . . . . 30
A Basic definitions 32
A.1 Complex manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32A.2 Complex Lie groups and Lie algebras . . . . . . . . . . . . . . . . . . . . . . . . . . 32
References 32
1

Introduction
This is my small thesis as part of the Mathematics program at the Utrecht University.The most important subject of this thesis is the Borel-Weil theorem. This theorem gives a
construction of a representation of a compact Lie group G with highest weight λ using only thishighest weight. Because every irreducible representation is uniquely characterized by its highestweight and all weights can be determined by looking at the Lie algebra of G, this constructionyields all irreducible representations of G. A short sketch of the construction that is used, is givenin the first section of chapter 3.
The thesis consists out of three chapters. The first chapter deals with holomorphic sectionsof a vector bundle. We prove that the space of holomorphic sections, of a vector bundle over acompact complex manifold, is finite-dimensional. This is needed in the proof of the Borel-Weiltheorem, where we use it to prove that the representation space of an induced representationis finite-dimensional. The second chapter is entirely about induced representations. Inducedrepresentations are a mathematical construction with various applications (such as in quantummechanics, see [6]). We will only use induced representations in the last chapter to prove theBorel-Weil theorem for the group SL(n,C). For this proof we also need some other concepts (suchcomplexification of groups, weights and characters of a torus, Bruhat-decomposition). From thesetopics only some results are given and most proofs are omitted.
To be able to understand the full text, the reader should know the basics of analysis, Lie groupsand Lie algebras (especially the root-space decomposition of a Lie algebra) and complex functiontheory in one variable.
2

Chapter 1
Holomorphic vector bundles
The main goal of this chapter is to prove theorem 1.3.3, which states that the space of holomorphicsections of a holomorphic vector bundle over a compact complex manifold is finite-dimensional.For trivial vector bundles over a complex manifold the space of holomorphic sections will prove tohave a very simple structure. The theorem will be needed later on in the proof of the Borel-Weiltheorem.
1.1 Vector bundles
To define holomorphic vector bundles, we need complex manifolds and holomorphic (or complex-analytic) functions on complex manifolds. The basic definitions of these are given in appendix A.1.
Definition 1.1.1. A (holomorphic or complex-analytic) vector bundle (E, π) of rank r over amanifold M is a (complex-analytic) mapping π : E → M of (complex) manifolds for which everyfiber Em = π−1(m) has the structure of a (complex) vector space of dimension r. Moreover wecan cover M with open sets U such that there is a mapping ρ : π−1(U) → V for which
• ρ : π−1(U) → U × V : x→ (π(x), ρ(x)) is a (complex-analytic) diffeomorphism.
• For every m ∈M the mapping ρ : Em → V is a linear isomorphism.
The pair (U, ρ) is called a local trivialisation of the vector bundle.
A section s of a vector bundle (E, π) over M is a function s : M → E for which π ◦ s = idM .The sections of a vector bundle are usually a very large class of functions. Therefore in this sectionwe only look at the holomorphic sections of a complex vector bundle E which we denote by O(E)or O(M,E). This class will prove to be much smaller.
Definition 1.1.2. Let G be a Lie group, H a closed subgroup and (W , π) a vector bundle overG/H . W is called a homogeneous vector bundle over G/H if G has a smooth action · on W suchthat, for every g ∈ G the following diagram is commutative.
W
π
��
g· // W
π
��G/H
lg // G/H
So the action of g ∈ G on W sends the fiber π−1(xH) to the fiber π−1(gxH).
3

1.2 Complex function theory
Because we do not want to restrict ourselves to one-dimensional manifolds, we will first considerholomorphic functions of several complex variables. We give the most important definitions andtheorems of complex function theory in more than one variable. Almost all of these definitionsand theorems are straightforward generalizations of similar definitions and theorems in the onevariable case.
A multi-index ν is an element of F = (Z≥0)n. For a point z = (z1, z2, . . . , zn) in Cn and a
multi-index ν = (ν1, ν2, . . . , νn) ∈ F we write zν = zν11 zν22 · · · zνnn . In this notation we can write a
complex polynomial as
p(z) =
m1,...,mn∑
ν1=0,...,νn=0
aν1,...,νnzν11 · · · zνnn =
m∑
ν=0
aνzν .
In this way we can easily write down complex polynomials and power series.A formal power series (around z′) is an expression of the form
∑
ν∈F
aν(z− z′)ν (1.1)
where aν is a complex number for every multi-index ν and z′ ∈ Cn is fixed. This power series is
a generalization of the power series in one variable. To give a precise meaning of this series as acomplex number (for a fixed value of z), we must specify in which order we must do the (infinite)summation.
Definition 1.2.1. Let z ∈ Cn. We say that the power series (1.1) converges at the point z toc ∈ C if ∀ǫ > 0 there is a finite set I0 ⊂ F such that for all sets I with I0 ⊂ I ⊂ F
∣
∣
∣
∣
∣
∑
ν∈I
aν(z− z′)ν − c
∣
∣
∣
∣
∣
< ǫ.
We say that a power series uniformly converges to a function f on M ⊂ Cn if ∀ǫ > 0 there is a
finite I0 ⊂ F such that for all sets I with I0 ⊂ I ⊂ F∣
∣
∣
∣
∣
∑
ν∈I
aν(z− z′)ν − f(z)
∣
∣
∣
∣
∣
< ǫ
for all z ∈M .
Definition 1.2.2. Let B ⊂ Cn be a region (an open subset of Cn) and f : Cn → C a complexfunction. The function f is called holomorphic if for every point z0 in B there is a power series
∑
ν∈F
aν(z− z0)ν
which converges to f on a neighbourhood of z0.
This definition is consistent with other definitions of holomorphic functions (such as a definitionusing the Cauchy-Riemann equations, see [3]).
In one-variable complex function theory one of the main theorems is the Cauchy integralformula. We will need the generalization of this theorem to several variables. We wil give themain results without giving a proof. The proofs can be found in [3] or other books on multi-variablecomplex analysis.
Definition 1.2.3. Let r = (r1, . . . , rn) ∈ Rn>0 and z′ ∈ Cn. The polydisc D about z′ with radius
r is defined as
Dr(z′) = { z ∈ C
n | |zk − z′k| < rk for 1 ≤ k ≤ n }.
4

The distinguished boundary of D is defined by
∂0D = { z ∈ Cn | |zk − z′k| = rk for 1 ≤ k ≤ n }.
Note that the distinguished boundary ∂0D is in general not equal to the ordinary boundary∂D = D of D.
The Cauchy integral formula of one-variable theory states that for a holomorphic function fand a simple closed curve γ we have
f(z) =1
2πi
∫
γ
f(ξ)
ξ − zdξ
for all z inside the curve γ. The generalization of this is an integral over the boundary of a polydisc.
Theorem 1.2.1 (The Cauchy Integral Formula). Let B be a region in Cn and D = Dr(ξ) apolydisc with ∂D ⊂ B. Let f : B → C be a holomorphic function.
Then for z ∈ D
f(z) = (1
2πi)n
∫
∂0D
f(x)
(x1 − z1) · · · (xn − zn)dx
= (1
2πi)n
∫ 2π
0
. . .
∫ 2π
0
f(ξ1 + r1eiθ1 , . . . , ξn + rne
iθn)
(ξ1 + r1eiθ1 − z1) · · · (ξn + rneiθn − zn)dθ1dθ2 . . . dθn.
Theorem 1.2.2. Let B be a region in Cn and (fj)∞j=1 a sequence of holomorphic functions on B.
If the fj convergence uniformly to a function f on B, then f is holomorphic on B.
Theorem 1.2.3. Let f : Cm → C be a holomorphic function and suppose f(λz) = λnf(z) for allλ ∈ C, z ∈ Cm.
Then f is zero if n < 0 or a homogeneous polonomial of degree n if n ≥ 0.
Proof. If n < 0 we see that f must be zero everywhere, otherwise f is not well defined in 0.
Suppose n ≥ 0. Let ν be a multi-index with |ν| ≤ n, then ∂νf = ∂|ν|f
∂zν11
...∂zνnn
satisfies
(∂νf)(λz) = λn−|ν|∂νf(z). We prove this by induction on |ν|.
• For |ν| = 0 the statement f(λz) = λnf(z) is true by assumption on f .
• Suppose (∂νf)(λz) = λn−|ν|∂νf(z) for all |ν| < d and we have a multi-index µ with |µ| =d > 0. We may assume µ1 > 0 (or arrange this by permuting indices). Take for ν themulti-index with ν1 = µ1 − 1 and νj = µj for 1 < j ≤ m. Now by the induction hypothesiswe have
(∂νf)(λz) = λn−|ν|(∂νf)(z)
and thus
(∂νf)(λz) = λn−|ν|∂νf(z)
∂
∂z1((∂νf)(λz)) =
∂
∂z1λn−|ν|∂νf(z)
(∂
∂z1∂νf)(λz)λ = λn−|ν| ∂
∂z1∂νf(z)
(∂µf)(λz) = λn−|ν|−1∂µf(z).
This means that (∂µf)(λz) = λn−|µ|(∂µf)(z).
5

So now we have for every ν with |ν| = n that (∂νf)(λz) = λn−|ν|(∂νf)(z) = (∂νf)(z). So(∂νf)(z) = (∂νf)(0), hence ∂νf is a constant function. From the power series of f we see thatf =
∑
|ν|≤n aνzν , so f is a polynomial of degree ≤ n. It now follows from the transformation rule
that aν = 0 if |ν| 6= n.
The last theorem and its corollary give some estimates on the (partial) derivatives of a holo-morphic function.
Theorem 1.2.4 (Cauchy’s estimates). Let f be a holomorphic function on the polydisc D = Dr(z).Then for every multi-index α we have
|∂αf(z)| ≤ |α|!M
rα
where M = supz∈D f(z).
Proof. The proof of the theorem can be found in [3]. The proof follows from the Cauchy integralformula by differentiation under the integral sign and some estimates on the maximum of f .
Corollary 1.2.5. Let f be a holomorphic function on the polydisc D = D(z, r). Then for every1 ≤ k ≤ n
∣
∣
∣
∣
∂f
∂zk(z)
∣
∣
∣
∣
≤M
r
where M = supz∈D f(z).
1.3 Holomorphic vector bundles
We start with some general definitions and theorems which we will need in this section. For twopoints x, y in R
n or Cn we write d(x, y) = ||x−y||, so d(x, y) is just the Euclidian distance betweenx and y. For two sets U and V we define d(U, V ) = infx∈U,y∈V d(x, y).
Definition 1.3.1. Suppose M is a set of functions from Cn to C. The set M is called equicon-tinuous on U ⊂ Cn if for every ǫ > 0 there is a δ > 0 such that for all x, y ∈ U
||x− y|| < δ ⇒ |f(x)− f(y)| < ǫ
for all f ∈M .
We can also use this definition of equicontinuity for functions f : X → Y where X and Y arearbitrary metric spaces. For an equicontinuous set of functions M we have the following theorem:
Theorem 1.3.1 (Ascoli’s theorem). Let X be a compact metric space and let M be a subset ofthe space C(X,Cn) (the space of continuous functions X → Cn with the supremum norm). ThenM is compact if and only if M is closed, bounded and equicontinuous.
Proof. The proof can be found in various forms in many books, see for example [7].
To prove the main theorem of this section, we need the following lemma.
Lemma 1.3.2. Let U be a region of Cn, x ∈ U and V = B(x, rV ) a closed ball for whichd(Cn \ U, V ) ≥ η > 0. Let (fj)
∞j=1 be a bounded sequence of holomorphic functions on U . Then
(fj |V )∞j=1 is an equicontinuous sequence of functions on V .
6

Proof. Take M = sup1≤j≤∞,z∈U fj(z). From corollary 1.2.5 we see that∂fj∂zk
(z) ≤ M/η for all j
and 1 ≤ k ≤ n. We write∂fj∂z
for derivative of fj with respect to z, so∂fj∂z
= (∂fj∂z1
, . . . .∂fj∂zn
).Let ǫ > 0 be given. Choose δ = η
Mǫ. Suppose x, y ∈ V and |x− y| < δ. Let γ be the straight
line between x and y. Then for every j ≥ 1:
|fj(x)− fj(y)| ≤ |
∫
γ
∂fj∂z
· γ′(t) dt| ≤
∫
γ
|∂fj∂z
· γ′(t)| dt
≤
∫
γ
M
η|γ′(t)| dt =
M
η|x− y| < ǫ.
This means that the family (fj)∞j=1 is equicontinuous.
Theorem 1.3.3. Let M be a compact, complex manifold and let (E, π) be a holomorphic vectorbundle over M . Then the space of holomorphic sections O(M,E) is finite-dimensional.
Proof. First we define m = dimM and n = rankE.
• First we will introduce a norm on the space of continuous sections. The restriction of thisnorm to O(M,E) will be a norm for which O(M,E) is a Banach space.
For each fiber Ex = π−1(x) we will choose a norm || · ||x such that this norm dependscontinuously on x. For each point x ∈ M , choose a neighbourhood Ux of x such that thereis a chart (Ux, κx) to an open region Ux ⊂ Cm and a trivialisation (Ux, ρx) of the vectorbundle. The mapping ρx : v → ((κx ◦ π)(v), ρx(v)) is a diffeomorphism from π−1(Ux) toUx × Cn.
π−1(Ux)
π
��
π×ρx // Ux × Cn
Ux κx
// Ux ⊂ Cm
BecauseM is compact we can choose from the covering (Ux)x∈M a finite subcovering (Uα)α∈I
where I is a certain index set. Now choose a partition of unity φα subordinate to (Uα).So (φα)α∈J is a collection of compactly supported smooth functions M → C such thatsuppφα ⊂ Uα and
∑
α∈J φα = 1 on M .
Now define ||v||x =∑
α φα(x)|ρα(v)|. This defines a norm on Vx for each x ∈ M . For acontinuous section s of E we can now take
||s|| = supx∈M
||s(x)||x.
Because M is compact and || · ||x is continuous this is well defined. It is easy to check thatthis defines a norm on C(M,V ). We can use this norm to define a metric on the spaceC(M,V ) by defining the distance between two functions f and g as d(f, g) = ||f − g||.So the space C(M,V ) (and all subspaces) is a metrizable space. Because convergence ofsections in this norm implies local uniform convergence, the spaces of continuous, C∞ andholomorphic functions are complete spaces for this norm, i.e., if sj is a row of sections forwhich limj→∞ ||s− sj || = 0 for a section s, then s is continuous, C∞ or holomorphic if thesj are continuous, C∞ or holomorphic respectively.
• We can now look at B = B(0, 1) which is the closure of B(0, 1) = { s ∈ O(M,V ) | ||s|| < 1 }.B is a closed and bounded subset of the space of the holomorphic sections. We will provethat every sequence in B has a convergent subsequence. Because B is closed, this meansthat B is sequentially compact. Now every metrizable sequentially compact space is compact(see [7], paragraph 3.7), so the space B is also compact. Because B is compact, the spaceO(M,V ) has to be finite-dimensional.
7

• We still have to prove that a sequence (fj)∞j=1 in B has a convergent subsequence. For each
point x ∈ M we again choose a chart (Ux, κx) such that there is a trivialisation ρx of thevector bundle. For Ux = κx(Ux) we choose choose rx > 0 such that Vx = B(y, rx) ⊂ Ux, y =κx(x) and d(Cm \ Ux, Vx) = ηx > 0. Take Wx ⊂ Vx to be Wx = B(y, 12rx). The open setsWx = κ−1
x (Wx) cover M . Because M is compact we can select a finite subcover (Wx)x∈I .
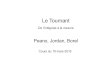
• We have now constructed a covering (Wx)x∈I which we will use to prove the theorem. Apicture of this construction is given in figure 1.1. Before continuing the proof, we firstconsider why we need this complex construction. To find our covering (Wx)x∈I we neededthe construction of the sets Ux, Ux, Vx and Wx for x ∈ I.
– The steps from (Ux) to (Ux) and from (Wx) back to (Wx) are needed because we needa trivilisation of the vector bundle. We need this trivialization to be able to work withfunctions from Cm to Cn, which are easier than sections of a vector bundle.
– To be able to use Ascoli’s theorem we need an equicontinous set of functions. We willuse lemma 1.3.2 to prove the equicontinuity and therefore we need functions defined acompact set. For this we use the covering (Vx) which are compact sets.
– Finally we need to select a finite subcovering, so we select the subsets Wx of Vx whichare open.
)(-1,2.4)(10.5,8.5)
bx
Ux
M
κxby
Wx
Vx
rV
Ux
Cm
Figure 1.1: Picture of the sets Ux, Ux, Vx and Wx.
• From the covering (Wx)x∈I we obtain a finite covering (Vx)x∈I of M by compact subsets.The functions gx,j = ρx ◦ fj ◦ κ−1
x are a sequence of holomorphic functions from Ux ⊂ Cm
to Cn for every x ∈ I. For every x ∈ I the functions (gx,j)∞j=1 are equicontinuous when
restricted to Vx ⊂ Ux by lemma 1.3.2.
Because I is finite, we can take I = { x1, x2, . . . , xd }. By Ascoli’s theorem the gx1,j = ρx1◦
fj ◦ κ−1x1
have a convergent subsequence (gx1,s1,j )∞j=1. Now (gx2,s1,j )
∞j=1 is an equicontinuous
8

sequence of functions on Vx2. Therefore we can again select a subsequence (gx2,s2,j )
∞j=1
which is convergent on Vx2. We can repeat this proces for every element of I. In this way
we get sequences (gxk,sk,j)∞j=1 that are convergent on Vxk
. The last sequence (sn,j)∞j=1 gives
a subsequence of the fj , which we write as hj = fsn,j.
• Now the subsequence (hj)∞j=1 converges on each Vx for x ∈ I, so there is a section h of the
vector bundle V such that h = limj→∞ hj . This means that (ρx ◦ hj ◦ κ−1x )∞j=1 converges on
each Vx to ρx ◦ h ◦ κ−1x and because Vx is compact this convergence is uniform (on each Vx).
From theorem 1.2.2 it follows that the limit function ρx ◦ h ◦ κ−1x is holomorphic on each set
Vx. As ρx ◦ h ◦ κ−1x is holomorphic on each Vx, we see that h is holomorphic on each Vx and
thus h is holomorphic on the entire space M .
1.4 Trivial vector bundles
A trival vector bundle (V, π) over M is a vector bundle for which V = M × Cn and π : V →M : (m, v) → m. The holomorphic sections of V can be identified with the holomorphic functionsfrom M to Cn.
Theorem 1.4.1. Let M be a compact, connected, complex manifold and f a holomorphic functionon M . Then f is a constant function.
Proof. The function f is continuous, so |f | is a continuous function on M . BecauseM is compact,|f | attains its maximum in some point x ofM . Choose a chart (U, κ) with x ∈ U . Then g = f ◦κ−1
is a holomorphic function on V = κ(U) ⊂ Cm. Define for z ∈ Cm the function gz : t→ g(κ(x)+tz).The holomorphic function |gz| has a maximum at y = κ(x). From one-variable complex functiontheory we know that gz is constant on V . (See for example [2, paragraph 5.4]). This means that gis constant on a neighbourhood of y, and therefore f is constant on a neighbourhood of x. Becausethis is true for every x ∈M and M is connected the function f is constant on M .
Theorem 1.4.2. Let (V, π) be a trivial vector bundle of rank r over the compact manifold M . Letd be the number of distinct connected components of M .
Then O(M,V )∼=Crd. The holomorphic functions are constant on each connected componentof M .
Proof. Suppose s ∈ O(M,V ). Then the coordinate functions s1, . . . , sn of s as a holomorphicfunction from M to Cn are holomorphic functions on M . By theorem 1.4.1 these functions areconstant on each connected component of M , so s is constant on each connected component.
Let M1, . . . ,Md be the connected components of M . Because every holomorphic section s isconstant on each Mj we can write s = λ1IM1
+ . . . + λdIMdfor unique λj ∈ Cr (here IMj
is theindicator function of Mj). Now ψ : O(M,V ) → Crd defined by
ψ : s =d
∑
j=1
λjIMj→ λ1 × λ2 × · · · × λd
is a linear bijective mapping and thus an isomorphism between O(M,V ) and Crd.
The last theorem gives a complete classification of the holomorphic sections of trivial vectorbundles. In the next subsection we will see some examples of this.
9

1.5 Examples
In this section we will look at two vector bundles over the compact complex manifold P1(C). Firstwe will define P1(C) and prove some of its properties. After that we will construct two vectorbundles over P1(C) and look at the holomorphic sections of these bundles.
Definition 1.5.1. Let Xn = Cn+1 \ {0}. On Xn we define the equivalence relation : x ∼ y ⇐⇒∃c ∈ C : c · x = y.
This defines an equivalence relation and we can construct the space Pn(C) = X/ ∼. We
denote the natural projection from Xn to Pn by π. For x = (x1, . . . , xn+1) in Xn we write[x] = [x1 : x2 : . . . : xn+1] = π(x) ∈ Pn.
The space Pn(C) is called the complex projective space (of dimension n). We can turn Pn intoa complex n-dimensional manifold by providing it with the following charts. For 1 ≤ j ≤ n+1 wedefine
Uj = { [x1 : x2 : . . . : xn+1] ∈ Pn | xj 6= 0 },
κj : Pn → C
n : [x1 : x2 : . . . : xn+1] →1
xj(x1, . . . , xj−1, xj+1, . . . , xn+1).
The Uj form an open cover of Pn. Note that the definition of κj does not depend on the choice ofx for the representant [x]. If p = (p1, . . . , pn+1) ∈ Uj ∩ Uk ⊂ P
n then q = κj(p) = (q1, . . . , qn) ∈κj(Uj ∩ Uk). If k < j then qk 6= 0 and if K > j then qk−1 6= 0. The coordinate transformationsare
κ−1j (q) = κ−1
j ((q1, . . . , qn)) = [q1, q2, . . . , qj−1, 1, qj, . . . , qn],
(κk ◦ κ−1j )(q) =
{
1qk(q1, q2, . . . , qk−1, qk+1, . . . , qj−1, 1, qj, . . . , qn) if k < j1
qk−1
(q1, q2, . . . , qj−1, 1, qj, . . . , qk−2, qk, . . . , qn) if k > j.
These coordinate transformations are are complex-analytic.The last thing we need to do to prove that Pn is a complex manifold, is to show that Pn is
Hausdorff. Suppose p = [x], q = [y] ∈ Pn and p 6= q.
• If p, q ∈ Uj we can select disjoint environments Ux and Uy of x and y respectively (becauseCn+1 is Hausdorff). Then π(Ux) and π(Uy) are disjoint open neighbourhoods of p and q.
• If there is no j for which p, q ∈ Uj , then for every 1 ≤ j ≤ n + 1 we have xjyj = 0.After a permutation of the indices we can arrange that x = (x1, x2, . . . , xs, 0, . . . , 0) andy = (0, . . . , 0, ys+1, . . . , yn+1). Take Ux = { z ∈ Cn+1 | |zn+1| < |z1| } and Uy = { z ∈ Cn+1 ||z1| < |zn+1| }. Again π(Ux) and π(Uy) are disjoint neighbourhoods of p and q.
So Pn(C) is Hausdorff.Note that the topology defined here, corresponds with the quotient topology for Pn as Pn =
X/ ∼. (The quotient topology is defined as the unique topology for which the projection mappingπ : X → Pn is continuous and open, see [7, paragraph 2.11]).
Theorem 1.5.1. The space Pn(C) is compact.
Proof. Sn = { z ∈ Cn+1 | |z| = 1 } is a compact subset of Cn+1. For each z ∈ Cn+1 \ {0} there isa point z0 = z/|z| ∈ Sn with π(z) = π(z0), so the projection π|Sn : Sn → Pn is surjective. Theimage of the compact set Sn under the continuous mapping π is Pn, so Pn must be compact.
For n = 1 we have that the space P1 is a complex one-dimensional manifold. There are twocharts:
U∞ = { [x : y] ∈ P 1 | x 6= 0 }, κ∞ : U∞ → C : [1 : z] → z
U0 = { [x : y] ∈ P 1 | y 6= 0 }, κ0 : U0 → C : [z : 1] → z.
10

There are two coordinate transformations. We have κ0(U0 ∩ U∞) = κ∞(U0 ∩ U∞) = C∗:
κ∞ ◦ κ−10 : C∗ → C
∗ : z → κ∞([z : 1]) =1
z,
κ0 ◦ κ−1∞ : C∗ → C
∗ : z →1
z.
Example 1. The manifold P1 is a compact. We can construct a trivial vector bundle of rank 1over P1 by taking E = P1 × C and π : E → P1 : (p, c) → p.
We will see that the space O(P1, E) is isomorphic to the constant functions on P1. Suppose fis a holomorphic function on P1. Then f ◦ κ−1
0 is an entire function on C. Because lim|z|→∞(f ◦
κ−10 )(z) = f(∞) < ∞, the function f ◦ κ−1
0 is bounded. By Liouville’s theorem every boundedentire function is constant, so f must be a constant function.
This proves that O(P1, E) is equal to the collection of constant functions on P1 (which is a1-dimensional space). This is in correspondence with theorem 1.4.2.
Example 2. Let X = C2 \ {0}, H = C∗ and V = Cn, n ∈ Z≥0. Here Cn is just C as a H-moduleunder the action
ξn(h) : v → ξn(h)v = h−nv
for v ∈ V and h ∈ H . This action gives an action on X × V :
h · (x, v) = (xh−1, ξn(h)v).
This action is proper and free, so we can construct the manifold Ln = X ×H V = (X × V )/H .For the image of (x, v) ∈ X × V in X ×H V we write [x, v]. The projection π : X ×H V → X/H :[x, v] → xH gives a vector bundle called the vector bundle associated to the action ξn. In thenext section we will look closer at the construction of this vector bundle, for now we will assumeeverything is properly defined.
Ln = X ×H V
π
��X/H ∼=P
1(C)
The space of holomorphic sections O(Ln) is isomorphic to
O(X,C, ξn) = { f : X → C | f is holomorphic, f(xh) = hnf(x) }
under the mapping O(X,C, ξn) → O(Ln) : f → sf where sf (xH) = [x, f(x)]. The section sf iswell-defined because of the transformation properties of f .
We will prove that O(X,C, ξn) is equal to the space Pn(C2) of homogeneous polynomials of
order n. This implies that dimO(Ln) <∞ which also follows from theorem 1.3.3.First note that O(X,C, ξn)∼=O(C2,C, ξn) because every holomorphic function of two variables
with an isolated singularity can be uniquely extended to a holomorphic function on the singularpoint (see [3]). In this case is is easy to see that the transformation property guarantees that forevery f ∈ O(X,C, ξn) we have limz→0 f(z) = 0 if n > 0 and limz→0 f(z) < ∞ if n = 0. Nextnotice that the transformation property together with theorem 1.2.3 gives that f is a polynomial inthe two variables z1 and z2. It is also clear that every homogeneous polynomial in two coordinatesfactorizes to a function on P1(C) which is holomorphic.
We know that the space O(C2, ξ) = Pn(C) has a basis of the polynomials pj = zj1zn−j2 for
0 ≤ j ≤ n. This gives that dimLn = n+ 1 and the sections in O(Ln) have a basis qj with
qj([z1 : z2]) = [[z1 : z2], pj(z1, z2)].
Again we see that this is well defined because of the transformation properties of pj .
11

Chapter 2
Induced representations
Let G be a Lie group and H a closed subgroup of G. A representation π of G in V gives arepresentation of H in V by restricting π to H . For a representation ξ of H in V , there is nonatural way to create a representation of G in V . But it is possible to create representations of Gin function spaces in a systematic way from representations of H . One way to do this is by usinginduced representations which will be defined in this chapter.
2.1 Associated fiber bundles
Let X and Y be manifolds and H a Lie group with smooth actions α1 and α2 on X and Y . Wewill denote these actions by
α1(h, x) = x · h−1, α2(h, y) = h · y.
We assume that the action from H on X is proper and free. Then X/H is a manifold and X is aprincipal fiber bundle with structure group H .
We can define an action α from H on the product X × Y by
α(h, (x, y)) = (x, y)h = (x · h−1, h · y).
This action is free, because H acts freely on the first component. To prove that the action isproper, we use the following theorem (which is proved in [9]):
Theorem 2.1.1. Let M be a topological space and H a Lie group with a continuous (right) actionon M . Then the following conditions are equivalent
i) The action of H on M is proper.
ii) For every pair of compact subsets C1, C2 ⊂M the set HC1,C2= { h ∈ H | C1h ∩ C2 6= 0 }
is compact.
Using this theorem we can prove that the action on X × Y is proper. Suppose A and B arecompact subsets of X × Y . The set HA,B = { h ∈ H | Ah ∩B 6= ∅ } is closed. Take compactsubsets AX , AY , BX , BY such that A ⊂ AX ×AY and B ⊂ BX ×BY . Now
HA,B = { h ∈ H | (AX ×AY )h ∩ (BX ×BY ) 6= ∅ }
⊂ { h ∈ H | AXh ∩BX 6= ∅ }.
But this last set is just HAX ,BXand is compact because the action of H on X is proper. So HA,B
is a closed subset of a compact set, implying that HA,B is compact. By the theorem the action αis proper.
12

Because α is a proper and free action, α is of principal fiber bundle type and the quotient spaceX×H Y = (X ×Y )/H is a smooth manifold. The projection π : X×Y → X induces a projectionρ : X ×H Y → X/H . We will write [x, y] = (x, y)H . The following diagram is commutative and(X ×H Y, ρ) is vector bundle over X/H with fiber Y .
X × Y //
π
��
X ×H Y
ρ
��X // X/H
For more details and a proof of the assertions here see [1, paragraph 2.4]. The fiber bundle(X ×H Y, ρ) is called the fiber bundle associated to the principal fiber bundle X → X/H usingthe action of H on Y .
We can consider the special case that Y is a finite-dimensional vector space. In this situationthe fiber bundle X ×H Y is in fact a vector bundle. Another special case is the situation thatG = X is a Lie group, H is a closed subgroup of G and V is a finite-dimensional H-module(so V is a finite-dimensional vectorspace, and H has a representation ξ in V ). In this case wehave a free action from H on G by h · g = gh−1. This action is proper because the mapping(g, h) → (g, h · g) = (g, gh−1) has a continuous inverse. H also has an action on V because V isan H module.
2.2 Induced representations
Let G be a Lie group, H a closed subgroup of G and ξ a finite dimensional representation of Hin V . In the previous section we have seen that we can construct the vector bundle V = G×H Vover G/H using the action
h(g, v) = (gh−1, ξ(h)v).
We have a natural action from G on G× V defined by left multiplication on the first coordinate:g · (x, v) = (gx, v). Note that the action of H on G × V by restricting the action from G is verydifferent from the action ofH onG×V . For this reason we will write from now on h·(x, v) = (hx, v)for the action of G (and H as a subgroup of G) on G × V and h(x, v) = (xh−1, ξ(h)−1v) for theaction of H on G× V .
Because the actions of G and H on G × V commute, the action of G passes to the quotientV = G×H V . Under this action V becomes a homogeneous vector bundle over G/H . We will writeh · [x, v] = [hx, v] for the action of G (and H as a subgroup of G) on V and h[x, v] = [xh−1, ξ(h)−1v]for the action of H on V (note that this last action is a trivial action, because [xh−1, ξ(h)−1v] =[x, v]).
By C(V), C∞(V) and O(V) we denote the spaces of continuous, smooth and holomorphicsections of V , respectively. G has a representation π in C(V) defined by
[π(g)s](x) = g · s(g−1x) (2.1)
for g ∈ G, s ∈ C(V) and x ∈ G/H . It is easy to check that this defines a representation. Restrictionof this representation gives representations of G in C∞(V) and O(V). We call this representationof G in C(V) the representation induced from ξ and write π = indGH(ξ). A geometric picture ofthe construction of the section π(g)s is given in picture 2.1.
2.3 Induced picture
We now have a representation of G in the space of sections C(V). We will prove that this spaceis isomorphic to a subspace of the space of functions from G to V . This isomorphism gives a
13

)(0,0)(9,7)G/H
V
b
x
b
[π(g)s](x)
b
g−1x
bs(g−1x)g·
Figure 2.1: The induced representation of ξ
representation of G in a subspace of C(G, V ). This realization of the induced representation of Gis called the induced picture.
First we identify V with the fiber π−1(eH) through the mapping v → (e, v). Now for everysection s ∈ C(V) we can define the function φs : G→ V by
φs(g) = g−1 · s(gH). (2.2)
Every function φ = φs which we obtain in this way from a section has the following transformationproperty. If s(gH) = [g, v] (so φ(g) = v), then we have for h ∈ H and φ = φs
φ(gh) = (gh)−1 · s(ghH) = h−1g−1 · s(gH)
= h−1g−1 · [g, v] = [h−1, v]
= [e, ξ(h)−1v] = ξ(h)−1v
so
φ(gh) = ξ(h)−1φ(g). (2.3)
We define C(G, V, ξ) to be the subspace of functions φ ∈ C(G, V ) which satisfy the relation (2.3).So we have a mapping s → φs : C(V) → C(G, V, ξ). For each function φ ∈ C(G, V, ξ) there is asection of V defined by
sφ(gH) = [g, φ(g)]. (2.4)
Note that this a good definition because of the transformation properties of φ. This means thatsφ(gH) is independent of the element g chosen to represent gH . The mapping φ → sφ is theinverse of s→ φs. The spaces C(V) and C(G, ξ) = C(G, V, ξ) are isomorphic under this mapping.
14

Because C(G, V ) is isomorphic to C(G)⊗ V by mapping f ⊗ v to the function g → f(g)v, thespace C(G, ξ) is isomorphic to a subspace of C(G) ⊗ V . The action R ⊗ ξ is an action of H onC(G) ⊗ V defined by
h · (f, v) = (f ◦Rh, ξ(h)v)
where Rh means right multiplication with h. Now C(G, ξ) is isomorphic to (C(G) ⊗ V )H ={ x ∈ C(G) ⊗ V | hx = x ∀h ∈ H }.
With this identification of C(V), C(G, ξ) and (C(G)⊗V )H we can look at the realization π ofπ = indGH(ξ) on C(G, ξ). One can easily check that π is given by
[π(g)φ](x) = φ(g−1x).
Indeed, if s is a section in C(V), f is the function corresponding to s, s′ = π(g)s, g ∈ G and f ′ isthe function corresponding to s′ then we have for x ∈ G:
f ′(x) := x−1 · (π(g)s)(xH)
= x−1 · g · s(g−1xH)
= (g−1x)−1s(g−1xH)
= f(g−1x)
so the induced action in C(G,C, ξ) is indeed defined by left multiplication with the inverse element.For every induced representation π we have found an equivalent representation π. The real-
ization π of π is called the “induced picture”. From now on we will write π = indGH(ξ) for boththe action on C(G, ξ) and on C(V).
2.4 Example
In this example we look at the Lie group SL(2,C) and a subgroup B which is the stabilizer of theaction of SL(2,C) on P1(C). We construct the induced represention for several representationsof B and show how this representation works. Finally we prove that the space of holomorphicsections is finite-dimensional (which also directly follows from theorem 1.3.3) and calculate thedimension of the space of holomorphic sections.
• Let G = SL(2,C). G has a natural action on C2 by multiplication. This action induces anaction α from G on P1(C) (P1(C) is defined in section 1.5). This action is transitive on theelement p = [1 : 0] of P1. The stabilizer group of p is
B = Gp = { g ∈ SL(2,C) | g · p = p }
= { g ∈ SL(2,C) | g ·
(
10
)
∈ C
(
10
)
}
= { g ∈ G | (g)i1 = 0 for i > 1 }.
So B = {(
a b0 a−1
)
∈ SL(2,C) }. The mapping α : G→ P1 : g → g ·p factorises over a bijectionα of G/B to P1(C).
Gα //
π
��
P1(C)
G/B
α
;;✇✇✇✇✇✇✇✇✇
We find that under the mapping α(
a 01 a−1
)
B → [a : 1],
(
0 −11 0
)
B → [0 : 1],
(
1 00 1
)
B → [1 : 0].
15

• For every n ∈ Z the group B has a representation ξn in C defined by (c ∈ C)
ξn(
(
a b0 a−1
)
)c = a−nc.
We have a Lie group G and a subgroup B, so in the same way as in section 2.1 we can definea free and proper action from B on the product SL(2,C)× Cn by
ζn : (h, (g, c)) → b · (g, c) = (gh−1, h−nc).
We can construct the vector bundle V = SL(2,C)×BC and look at the induced representation
π = πn = indSL(2,C)B (ξn). This representation works on the space C(G,C, ξ) which is the
space of continuous functions G → C which satisfy the transformation rule f(xh) = h−1 ·f(x) = anf(x) for x ∈ G, h =
(
a b0 a−1
)
∈ B.
• To make this representation more concrete, we look at the function f : G→ C : ( x1 x2
x3 x4) → xn1 .
The function f clearly is an element in C(G,C, ξn). For every g =(
α βγ δ
)
∈ SL(n,C) we
have the induced representation π(g) working on f . This gives the function p = π(g)f :
p(
(
x1 x2x3 x4
)
) = [π(
(
α βγ δ
)
)f ]
(
x1 x2x3 x4
)
= f(
(
α βγ δ
)−1 (x1 x2x3 x4
)
)
= f(
(
δ −β−γ α
)(
x1 x2x3 x4
)
)
= (x1δ − x3β)n.
It is easy to check that p again satisfies the transformation rule (2.3), so p ∈ C(G,C, ξn).
Theorem 2.4.1. Let G = SL(2,C), B, ξn and V = G ×B Cn be defined as before. The space ofholomorphic sections O(G/B,V) is
• empty if n < 0;
• isomorphic to the space of homogeneous polynomials of degree n in 2 variables if n ≥ 0.
Proof. Let s be a section in O(G/B,V) and let f = fs be the corresponding holomorphic functionon G. For every x = ( x1 x2
x3 x4) ∈ G and h =
(
a b0 a−1
)
∈ B. we have the following transformationproperty
f(x) = f(
(
x1 x2x3 x4
)
) = ξ(h)f(xh)
= a−nf(
(
ax1 bx1 + a−1x2ax3 bx3 + a−1x4
)
)
= a−nf(xh)
Because x is in SL(2,C) either x1 or x3 is non-zero. We now assume x1 is non-zero (the casex3 6= 0 is analogous). We can take a = 1 and b = −x2
x1
to get
f(x) = f(
(
x1 0x3 −x2x3
x1
+ x1x4
x1
)
) = f(
(
x1 0x3 x1
−1
)
).
We see that f depends only on x1 and x3, so f factorizes to a function f of the projection of x ofthe variables x1 and x3. We denote the projection by π.
16

We can now take b = 0 and a arbitrary to get
f(x) = a−nf(
(
ax1 0ax3 a−1x1
−1
)
) = a−nf(
(
ax1ax3
)
)
= a−nf(π(ax)) = a−nf(ax)
⇒ f(ax) = anf(x).
From theorem 1.2.3 it follows that f is a polynomial of degree n in x1 and x3 if n ≥ 0 or zero ifn < 0.
17

Chapter 3
The Borel-Weil Theorem
The main goal of this section is to prove the Borel-Weil theorem. We have a complete classificationof all irreducible representations of a Lie group G in terms of the (dominant) weights of its Liealgebra (see theorem 3.3.3). The Borel-Weil theorem gives a way to create the representationcorresponding to a dominant weight.
Before we can prove the Borel-Weil theorem (for the group SL(n,C)) we first look at com-plex groups, weights, characters and the Bruhat-decomposition of a group. This is done in thesections 3.2 to 3.5.
3.1 Construction of a representation with highest weight λ
We give a short sketch of the various steps used in the final proof of the Borel-Weil theorem. Thepurpose of this sketch is giving the reader an idea how the theory from the next sections will beused. We start with a compact Lie group G and a dominant weight λ.
• First we choose a torus T in G and calculate the roots and root spaces of gC. Using the root-space decomposition we define a subgroup B of the complexification GC of G correspondingto a subalgebra of gC.
• The weight λ is used to construct a character χ on H = TC. The character is then extendedto a one-dimensional representation of the subgroup B.
• We can use the construction of induced representations to construct a representation π of G(or GC) using the subgroup B and representation χ.
• This induced representation has all the properties we need: it is irreducible and has highestweight λ. To prove these properties we need some more theory from the sections 3.2 to 3.5.
3.2 Complexification of groups
To prove the general Borel-Weil theorem, we need the complexification of a compact Lie group.The reason for this is the following: in the proof of the Borel-Weil theorem we need to provethat the representation space of the induced representation (the space of holomorphic sections) isfinite-dimensional. For this we use theorem 1.3.3 so we need to look at the holomorphic sectionsof a compact complex manifold. For this we use a compact complex manifold defined by taking aquotient of the complexification of G and a suitable subgroup. For this reason, we will first lookat some results on the relations between complex and real groups (and algebras).
First we suppose GC is a complex Lie group with Lie algebra gC. A real Lie subalgebra u0 iscalled a real form for gC if
(gC)R
= u0 ⊕R iu0.
18

Here (gC)Ris gC as a real vector space. It is possible to show that every complex semi-simple
group has a compact real form u0. The connected subgroup U0 of G generated by u0 is a closedcompact subgroup of G.
Now suppose that G is a connected compact real Lie group with Lie algebra g. We can definethe complexification of g by
gC = g⊗R C.
This means that (gC)R = g ⊕R ig. Now we want to define the complexification of G. Because Gis compact and connected, G is a reductive Lie group and we can embed G as a closed subgroupof GL(V ) for some real vector space V . This gives an embedding of g and gC as a subalgebraof End(V ) and End(V C) respectively (here V C = V ⊕ iV ). We can define GC as the connectedsubgroup of GL(V C) with Lie algebra gC. The group GC is called the complexification of G. Itcan be shown that up to isomorphisms the complexification GC is unique. With this definition Gis embedded as a closed subgroup of GC.
Example 3. Take G = SL(2,C). On the Lie algebra level we have sl(2,C) = CX⊕CH⊕CY , where
X =
(
0 10 0
)
, H =
(
1 00 −1
)
, Y =
(
0 01 0
)
.
We can take u0 = iR(X + Y ) + iRH +R(X − Y ). Then the subgroup K generated by u0 is equalto SU(2) which is a compact connected subgroup of SL(2,C).
We need two theorems on the relation between a compact Lie group G and its complexificationGC.
Theorem 3.2.1. Suppose G is a compact connected Lie group which can be embedded in GL(V ).Define GC and gC as before. Let T be a maximal torus in G with Lie algebra t.
Then h = t ⊕ it is a Cartan subalgebra of gC. Let B be connected subgroup of GC with Liealgebra b = h⊕
⊕
α>0 gα.Then T ⊂ B and the mapping G/T → GC/B : gT → gB is a real-analytic diffeomorphism.
Because G is already compact, the spaces G/T and GC/B are compact.
Proof. See [1] on page 297.
Theorem 3.2.2 (Weyl’s unitary trick). Let G be a simply connected linear reductive Lie groupand let GC be its complexification. Let g = l + p be the Cartan decomposition of the Lie algebrag. Let U and GC be the connected analytic groups of matrices with Lie algebras u = l + ip andgC = (l+ p)
C.
If V is a finite-dimensional complex vector space, then a representation of any of the followingkinds leads, via the formula gC = g⊕ ig, to a representation of each of the other kinds. Under thiscorrespondance invariant subspaces and equivalences are preserved:
(a) a representation of G on V
(b) a representation of U on V
(c) a holomorphic representation of GC on V
(d) a representation of g on V
(e) a representation of u on V
(f) a complex-linear representation of gC on V
Proof. See Proposition 5.7 in [4]. We will need only the equivalence of (a) and (c). Using thistheorem we can switch between representations of a simply connected compact Lie group and itscomplexification.
19

3.3 Weights and characters
In the entire section 3.3 we assume G is a compact connected Lie group with Lie algebra g and amaximal torus T with corresponding Lie algebra t.
Definition 3.3.1. Let (π, V ) be a finite-dimensional representation of a group G. We define thecharacter of π to be the function χπ : g → trπ(g).
Every character is a continuous, conjugacy-invariant function on G. If π is a non-trivialirreducible finite-dimensional representation of T in V , π must be one-dimensional. For x ∈ T ,π(x) acts on V by multiplication with the element χπ(x) = trπ(x). The mapping χπ : T → C∗ isin fact a 1-dimensional representation of T in the vector space C.
3.3.1 Weights
Definition 3.3.2. We define Λ = ker(exp |t) = {X ∈ g | expX = e }. Λ is called the T -lattice.We define the weights of T to be the set {µ ∈ it∗ | µ(Λ) ∈ 2πiZ }. We denote the set of weights
of T by T .
The notation G is also used for the set of equivalence classes of irreducible representations ofa Lie group G. The following theorem says that these sets are isomorphic, so we can use the samenotation for weights and equivalence classes of irreducible representations.
Theorem 3.3.1. The class T of irreducible representations of T is in bijective correspondancewith the set of weights of T .
Proof. The irreducible representations of T are all one-dimensional (because T is abelian), so everyirreducible representation is equivalent to a character of T .
If µ is a weight of t, we can define a character on T by
χµ : t ∈ T →tµ = eµ(X)
if t = expX . This is a well defined character, because if t = expX = expX ′ then e = exp(X−X ′)so X −X ′ ∈ Λ. Because µ is a weight, in follows that eµ(X−X′) = 1. Now
eµ(X) = eµ(X′+X−X′) = eµ(X
′)eµ(X−X′)
= eµ(X′).
Also note that for every t ∈ T there is a X ∈ t such that t = expX , because T is connected andabelian.
For every character χ of T we can define µ = Teχ : t → C. The following diagram is commu-tative.
Tχ // C∗
t
exp
OO
µ // C
e·
OO
We first prove that µ is in fact a map t → iR. We know T is compact because G is compact,so the image χ(T ) is a compact subset of C. Now suppose X ∈ t such that µ(X) = a + ib witha, b ∈ R. Then we have that A = {χ(exp(nX)) | n ∈ Z } is a subset of χ(T ) and this impliesthat A is bounded. On the other hand A = { eµ(nX) | n ∈ Z } = { enaeinb | n ∈ Z }. Because A isbounded, it follows that a = 0. This means that µ maps t into iR.
From the diagram we also see that eµ(Λ) = (χ◦exp)(Λ) = χ(0) = 0. This implies µ(Λ) ⊂ 2πiZ,so µ is a weight of t. From the diagram it also follows that χ and the mapping t → tµ = tTeχ areequal.
20

There is also a definition of the weights of a representation π of G in V in terms of the weightspaces of π. We will now show the relation between these definitions of weights.
If π is a representation of G we can define for every linear form µ : t → iR the correspondingweight space
Vµ = { v ∈ V | π(X)v = µ(X)v, ∀X ∈ t }.
If Vµ 6= 0 we call µ a weight of π. Now if Vµ 6= 0 then π(t), with t = expX ∈ T , acts on Vµ asmultiplication by eµ(X) = tµ because
π(t) : v →π(expX)v = exp(π∗X)v
= eµ(X)v.
So π(t) acts on the space Vµ as multiplication by tµ and this defines a character on T . Thischaracter corresponds to the weight µ in the original definition of weights. So we see that a weightof the representation π of G is also a weight of the Lie algebra t.
From now on we will assume that we have chosen a set of positive roots P corresponding to aWeyl chamber c.
Definition 3.3.3. A weight λ of a representation π is called a highest weight for that represen-tation if one of the following equivalent conditions is satisfied:
(i) If α ∈ P , then λ+ α is not a weight of π.
(ii) For every weight µ of π we have µ = λ−∑
α∈P nαα for nα ∈ Z≤0.
The proof of the equivalence of these conditions can be found in [1]. These highest weightscharacterize a representation in the following sense:
Theorem 3.3.2. Let G be a compact connected Lie group and let π and π′ be two irreduciblerepresentations of G with highest weights λ and λ′ respectively. Then π is equivalent π′ if and onlyif λ = λ′.
Proof. This follows from Corallary 4.11.5 from [1] and Lemma 20.2 from [9].
3.3.2 Dominant weights
We have seen that the weights of a representation are also weights of the torus T . For an irreduciblerepresentation there is the highest weight characterizing the representation. For the weights of atorus there is a similar concept: the dominant weights. Recall that for every root α there is aunique element α∨ in [gα, g−α] such that α(α∨) = 2. The elements α∨ are called the co-roots.
Definition 3.3.4. A weight µ of the Lie algebra t is called dominant (with respect to a positiveroot system P ) if µ(α∨) ≥ 0 for all α ∈ P .
To prove the Borel-Weil theorem at the end of this section, we need the following theorem.The proof can be found in [1, paragraph 4.9]. It says that every dominant weight is the highestweight for some representation.
Theorem 3.3.3 (Highest Weight Theorem). Let G be a compact connected Lie group. Themapping which assings to each irreducible representation of G its highest weight is a bijection fromG to the set of dominant weights in T .
In particular: every weight of a representation is a weight of the torus t; every highest weightof a representation is a dominant weight.
If G is a simply connected Lie group the situation is a bit more simple. After a choice of simpleroots S = {αi, . . . , αn} (so S is a fundamental system) we can define the fundamental weights ωi
by
2ωi(α∨j )/|α|
2 = δij . (3.1)
21

The fundamental weights are indeed weights as in definition 3.3.4. Note that every fundamentalweight is a dominant weight. In fact every dominant weight is the (positive) sum of fundamentalweights. This is in general not true if G is not simply connected.
Example 4. Take G = T = R/Z (with addition as the group operation). The Lie algebra t of T isequal to R. For X ∈ t, the solution to dh
dt(t) = vX(h(t)), h(0) = e is given by h(t) = Xt. Here vX
is the left-invariant vector field defined by vX : G→ TG : g → TeLg(X) = X). So the exponentialmapping t → T is given by X → X + Z.
The T -lattice is Λ = ker exp = Z. The weights of t are µn : X → 2πinX , n ∈ Z. For everyweight µn the corresponding character on T is defined by
χn : t→ tµn = eµn(t) = e2πint.
So all irreducible representations of the circle T are given by the functions t→ e2πint.Note that the representation πn(t) = e2πint has exaclty one weight µn, this weight is a highest
weight for this representation. Because there are no roots in t, all weights of T are dominantweights.
3.3.3 Extending characters
Suppose we have a compact connected Lie group G with maximal torus T . For the Lie algebra gC
we have the root space decomposition
gC = h⊕⊕
α∈R
gα.
After a choice of positive roots P we can define n = ⊕α∈P gα, n = ⊕α∈P g−α, b = h ⊕ n andb = h ⊕ n. Now B+ = NGC(b) = exp b and B− = NGC(b) = exp b are Lie subgroups of GC, andboth B+ and B− are Borel subgroups (maximal solvable subgroups).
Lemma 3.3.4. Every character χ of T can be uniquely extended a homomorphism B+ → C∗ orto a homomorphism of B− → C∗.
Proof. The proof can be found in [1] or [8]. In the proof there is also a construction the extensionof the character to B+ or B−. The construction follows from requiring χ(n) = χ(e) for all n ∈ N+
or N−.
3.3.4 Line bundles
Now that we can extend characters of T to representations of B = B−, we can define line bundles(vector bundles of rank 1) over GC/B. For every weight λ (corresponding to the torus T of a Liegroup G) define Lλ to be the line bundle
Lλ = G×B C (3.2)
where the representation ξ of B on C is defined by extending the character t→ tλ.
22

3.4 Highest weight space of irreducible representations
Suppose we have a representation (π, V ) of a Lie group G. If N is a subgroup of G then we writeV N for the set of fixed points of V under the action of N . So
V N = { v ∈ V | π(g)v = v, for all g ∈ N }.
In a similar way we can write
V n = { v ∈ V | π∗(X)v = 0, for all X ∈ n }
if n is a Lie subalgebra of g or gC.For a connected Lie subgroup N , the sets V N and V n are equal if n = Lie(N). We can prove
this in two steps
• If v ∈ V N , then for all X ∈ n we have that exp tX ∈ N so π(exp tX)v = v. From this itfollows
π∗(X)v = Teπ(X)v =d
dt
∣
∣
∣
∣
t=0
π(exp tX)v =d
dt
∣
∣
∣
∣
t=0
v = 0
and thus X ∈ n.
• If v ∈ V n then for all X ∈ n we have π∗(X)v = 0. Now suppose n ∈ N . Because Nis connected we have N = Ne and we can write n = expX1 expX2 · · · expXj for certainX1, . . . , Xj ∈ n.
Now for every Xk we have for all t0
d
dt
∣
∣
∣
∣
t=t0
π(exp tXk) =d
ds
∣
∣
∣
∣
s=0
π(exp(t0 + s)Xk)
= π(exp t0Xk)d
ds
∣
∣
∣
∣
s=0
π(exp(s)Xk)
= π(exp t0Xk)π∗(Xk)v = 0
so π(expXk)v = v for all 1 ≤ k ≤ j. From this it follows that
π(n)v = π(expX1 expX2 · · · expXj)v
= π(expX1)π(expX2) · · ·π(expXj)v = v.
This means that n ∈ V N .
Theorem 3.4.1. Let G be a compact connected Lie group with Lie algebra g. After a choice ofpositive roots define n = ⊕α>0gα and N as the subgroup generated by exp n.
Then a non-trivial representation π of G in a finite-dimensional vector space V is irreducibleif and only if dimV N = 1.
Proof. The proof that for a non-trivial irreducible representation the dimension of the space V N
is one follows from Theorem 4.11.4 in [1] and the preceding remarks on V N and V n.Now suppose π is not irreducible. Then V can be written as a direct sum of π(G)-invariant
subspaces V = ⊕jVj such that the representation πj of π on each of the subspaces Vj is irreduciblefor each j (because G is compact). This means that for every subspace we have dimV N
j = 1 if
Vj 6= 0. We can easily see that V N = ⊕jVNj . Because π is reducible we see that dim V N =
∑
j dim V Nj > 1.
If π is irreducible, then V N = Vλ for a unique weight λ. This weight λ is the heighest weightof the representation π.
23

3.5 Orbit structure on GC/B
Let G be a compact connected Lie group with Lie algebra g. Choose a maximal abelian subalgebrat of g and define T = exp(t).
The complexification gC of the Lie algebra g is the direct sum gC = h ⊕⊕
α∈R gα where Ris the collection of roots of gC. We define n = ⊕α>0gα, n = ⊕α>0g−α and h = tC = g0. NowgC = n⊕ h⊕ n. Take N = N+ = exp n and B = B− = exp(h⊕ n). B is a Lie subgroup of GC andGC/B has the structure of a compact complex manifold. The subgroup N has a natural action inGC/B by multiplication on the left.
Theorem 3.5.1 (Bruhat-decomposition). In the above notation we have that the orbits of N inGC/B are precisely the NwB for w ∈ W , where W = NGC(T )/T is the Weyl-group. The orbitsare are immersed manifolds. This means that we have the decomposition
GC/B =∐
w∈W
NwB.
The orbit NeB is dense and open in GC. For all other orbits NwB (w 6= e) the dimension isstrictly lower then dimGC.
Proof. The decomposition is called Bruhat-decomposition. The theorem stated here is a specialcase of the Bruhat decomposition for real groups. The proof in this case can be found in [4]or [5].
Example 5. We look at GC = SL(2,C). We choose
H = {
(
a 00 a−1
)
| a ∈ C∗ }
as a Cartan subgroup in GC. We have
B = {
(
a 0b a−1
)
| a ∈ C∗, b ∈ C },
N = {
(
1 c0 1
)
| c ∈ C }.
The centralizer of T in GC is ZGC(T ) = T and the normalizer of T equals
NGC(T ) = T ∪
(
0 −11 0
)
T.
So W has two elements eT and wT where w =(
0 −11 0
)
.The Bruhat-decomposition of SL(2,C) is
SL(2,C) = NeB∐
NwB
and dimNeB = 1, dimNwB = 0 in G/B.We can explicitly show that this decomposition holds. Suppose g =
(
a bc d
)
∈ G. If d = 0 theng ∈ wB = NwB. If d 6= 0 we can write
g =
(
a bc d
)
=
(
d−1 + bcd−1 bc d
)
=
(
1 d−1b0 1
)(
d−1 0c d
)
and we see g ∈ NeB.
24

3.6 The Borel-Weil theorem for SL(n,C)
In this section we will prove the Borel-Weil theorem for SL(n,C). We will give all irreduciblerepresentations SL(n,C), or to be more precise: we will give a representation for each equivalenceclass of irreducible representations of SL(n,C). The proof will be a base for the proof of the Borel-Weil theorem in the general case. Because we are working with a concrete group, we will be ableto show the complete structure of the representions and decomposition of SL(n,C).
• First note that SL(n,C) is the complexification of G = SU(n,C). Indeed, the Lie algebra
of SU(n,C) is su(n,C) = {X ∈ M(n,C) | trX = 0, X +X† = 0 } so su(n,C)C= sl(n,C) =
su(n,C)⊕ isu(n,C). We take for T the diagonal matrices in SU(n,C). T is a Cartan subgroupof SU(n,C). The Lie algebra t of T is the collection of diagonal matrices in su(n,C). Wedefine h = tC.
• We have SL(n,C) = { g ∈ GL(n,C) | det g = 1 } and sl(n,C) = {X ∈M(n,C) | trX = 0 }.We take H = { g ∈ SL(n,C) | gij = 0 if i 6= j } as a maximal torus (maximal abelian sub-group) in SL(n,C). The Lie algebra of H is equal to h = {X ∈ sl(n,C) | Xij = 0 if i 6= j }.We write Eij for the matrix (Eij)kl = δikδjl. We define the linear functionals ǫi on h byǫi(X) = Xii. The roots of sl(n,C) are the αi,j = ǫi− ǫj, i 6= j with corresponding root spacesgi,j = gαi,j
= CEij . As a set of positive roots P we choose the αi,j for which i > j. Wehave the decomposition
gC = h⊕⊕
α∈P
gα ⊕⊕
α∈P
g−α.
We define n =⊕
α∈P gα, n =⊕
α∈P g−α, b = h ⊕ n, b = h ⊕ n. We define N , B+ andB− = B to be the Lie groups generated by n, b and b respectively. The group N is equal tothe group of upper triangular matrices with 1 on the diagonal, the group B is equal to thegroup of lower triangular matrices with determinant 1.
• We have determined the root-space decomposition of SL(n,C). The next step is to calculateall the (dominant) weights of T . We know that if X = diag(X1, X2, . . . , Xn) is an elementof sl(n,C) then expX = diag(eX1 , eX2 , . . . , eXn) ∈ SL(n,C). The T -lattice is
Λ = ker exp |t = {X ∈ sl(n,C) | Xj ∈ 2πiZ, 1 ≤ j ≤ n }.
The weights of T are equal to
T = {µk ∈ it∗ | µk(X) =∑
j
kjXj, for kj ∈ Z }.
Note that because∑
iXi = 0 we have a certain freedom in the choice of the κj when defininga functional κ. We can always choose 0 ≤
∑
i ki < n and this choice defines the κj uniquely.From the roots α ∈ P we can calculate the co-roots: because [gi,j , gj,i] = C(Eii − Ejj) wefind α∨
i,j = Eii − Ejj . The value of a weight µk on a co-root α∨i,j is
µk(α∨i,j) =
∑
l
kl(αi,j)ll = ki − kj .
The weight µk is dominant if it is positive on all positive co-roots, so we must have ki ≥ kjfor all i > j.
• From the weights we get all the characters on T . If t = expX = diag(t1, t2, . . . , tn) then
χk = χµk: T → C
∗
: t→ tµk = eµk(X) = (t1)k1 · · · (tn)
kn .
25

By theorem 3.3.4 the character χk on T extends to a representation χk on B, it is given by
χk :
b1...
. . .∅
...∗ . . .
. . .
. . . bn
→ bk1
1 bk2
2 · · · bknn .
For example for sl(2,C) the characters are the functions χ : b→ bn1 bm2 = b
(n−m)1 . The characters
corresponding to the dominant weights are the characters for which n − m ≥ 0. Note that inthe example in section 2.4 we have that exactly the anti-dominant characters give non-trivialrepresentations of SL(2,C). This is because we use B+ instead of B− in the example.
• The next step is to take a character χk and show that this character induces a represen-tation of SL(n,C) with highest weight λ = µk. The induced representation π = πλ =
indSL(n,C)B (χk) is a representation of SL(n,C) in O(SL(n,C)/B,Lλ) where the vector bundle
Lλ = SL(n,C)×B C is defined by (3.2).
By theorem 3.2.1 we have that SU(n,C)/T ∼=SL(n,C)/B. Because SU(n,C) is compact itfollows that also SL(n,C)/B is compact. From theorem 1.3.3 it follows that the space ofholomorphic sections O(Lλ) is finite-dimensional. This means that the representation π isfinite-dimensional.
Now suppose we can take a highest weight vector φ of the representation π (such a vectorexists if π is non-trivial; it is unique up to scalar multiplication if the representation π isirreducible). By definition π∗(X)φ = 0 for all X ∈ gα , α ∈ P , so n · φ = 0. This meansthat φ is invariant under the action of N : N · φ = φ. The space of N -invariant functionsis denoted by O(Lλ)
N . Because φ is a holomorphic function on SL(n,C)/B, φ is uniqelydetermined by its values on the dense subsetNeB of SL(n,C)/B (NeB is dense in SL(n,C)/Bby theorem 3.5.1). Every N -invariant function is therefore already characterized by its valueon e ∈ N . We can define the linear mapping eve : O(Lλ) → (Lλ)e by sending φ to φ(e).Because every N -invariant function is determined by its value on e, the restriction
eve : O(Lλ)N → (Lλ)e ∼=C
is injective. Because eve is injective on O(Lλ)N , we must have dimO(Lλ)
N ≤ 1. Fromtheorem 3.4.1 it follows that the representation π is irreducible.
So far we have not used anything specific of the group GC = SL(n,C). All statements caneasily be generalized to a general compact, connected, reductive group G. This will be done inthe section 3.7.
For every weight λ we have constructed an irreducible or trivial representation πλ of G in thespace of holomorphic sections, or in the space O(SL(n,C),C, χk). Now we have to show that therepresentation πλ is non-trivial if and only if λ is a dominant weight. We also have to prove thatthe left regular representation π is a representation with highest weight λ.
For SL(n,C) we will first prove that the representation π has λ as its highest weight and thatthis weight must be dominant for the representation to be non-trivial. After that we will provethat for every dominant weight the representation is non-trivial by constructing a highest weightvector in the space O(SL(n,C),C, χk). In the general case this is not possible and we have to useanother proof. An outline of this proof is given in the next section, for now we concentrate onSL(n,C).
• We assume O(GC/B,Lλ) is non-zero, so we can take a section s ∈ O(GC/B,Lλ)N . To this
section there is a corresponding function f ∈ O(GC,C, χλ) which is a highest weight vectorof the representation πλ. The function f transforms under the action of G according to aweight µ. The function f has several transformation properties:
26

– Because f ∈ O(GC/B,C, χλ) we have for every x ∈ GC, h ∈ B
f(xh) = χλ(h)−1f(x) = h−λf(x).
– Because f is a highest weight vector for the weight µ for the left regular representationof GC, f transforms as
f(hx) = [πλ(h−1)f ](x) = h−µf(x)
for a weight µ and x ∈ GC, h ∈ H .
– For n ∈ N we have f(nx) = n−µf(x) = f(x) (because f is in O(GC/B,Lλ)N ).
From the transformation properties it follows that because f 6= 0 we must have f(e) 6= 0.We also have for every h ∈ B that
f(e) = f(hh−1) = h−µhλf(e) = hλ−µf(e).
This implies that µ = λ, so the representation πλ is indeed a representation with highestweight λ.
We must now prove that λ = µ is dominant. For this we notice that for every weight α wehave that g(α) = gα⊕Cα∨⊕g−α is isomorphic to sl(2,C). We can select an sl(2,C)-triple Xα,Yα, Hα with Xα ∈ gα, Yα ∈ g−α and Hα = α∨ ∈ [gα, g−α]. If (π∗, V ) is the representationof gC corresponding to πλ (defined by π∗ = Teπλ) then h acts on V n through the weight λ.In particular we have for every X ∈ h that π∗(H)− λ(H)I = 0 on V n.
We can now consider π∗|gαfor a positive root α. Because gα ⊂ n, we have that V n ⊂
V gα = V n(α). This means that every vector in V n is a highest weight vector for g(α). Nowλ(Hα) is positive, because λ is a highest weight (and therefore dominant) for the sl(2,C)-representation of g(α). So for every positive weight α we have that λ(Hα) ≥ 0, in otherwords: λ is dominant.
We will now look some closer at the weights and characters. By considering only the fundamentalweights it will be more easy to construct a function f which is a highest weight vector for therepresentation πλ.
• Note that if λ, λ1 and λ2 are all weights and λ = λ1 + λ2 then we have ξ = ξ1ξ2 if ξ, ξ1 andξ2 are the characters corresponding to λ, λ1 and λ2. We also have that if f1 ∈ O(GC,C, ξ1)and f2 ∈ O(GC,C, ξ2) then f = f1f2 ∈ O(GC,C, ξ) because for x ∈ GC and h ∈ B we have
f(xh) = f1(xh)f2(xh) = ξ1(h)−1f1(x)ξ2(h)
−1f2(x)
= (ξ1(h)ξ2(h))−1f1(x)f2(x)
= ξ(h)−1f(x).
This means that we only have to construct a holomorphic function for every fundamen-tal weight because for an arbitrary weight the function is a product of functions for thefundamental weight.
The fundamental weights are the weights λj =∑j
k=1 ǫk for 1 ≤ j ≤ n − 1. To thesefundamental weights correspond the fundamental characters:
χj : B → C∗ :
t1...
. . .∅
...∗ . . .
. . .
. . . tn
→
j∏
k=1
tk.
27

We define for 1 ≤ j ≤ n the functions
Aj(x) = det
xjj . . . xjn...
...xnj . . . xnn
.
The function Aj is a polynomial function, so Aj ∈ O(SL(n,C)). We also have for x ∈ SL(n,C)and h ∈ B
Aj(xh) = det
xjj . . . xjn...
...xnj . . . xnn
hjj ∅...
. . .
∗ . . . hnn
= det
xjj . . . xjn...
...xnj . . . xnn
det
hjj ∅...
. . .
∗ . . . hnn
= Aj(x)Aj(h) = Aj(x)n∏
k=j
hkk
= (
j−1∏
k=1
hkk)−1Aj(x) = χj−1(h)
−1Aj(x)
and so Aj ∈ O(SL(n,C),C, χj−1).
• It is not difficult to see that the functions Aj we have defined here are invariant under theaction of N . This means that the Aj are highest weight vectors. We also know that thereis only one highest weight vector (up to scalar multiplication). Because we have alreadyproved that the Aj are functions in O(SL(n,C),C, χj)
N it follows from the previous pointsthat the Aj are highest weight vectors for the weight λj .
• For every fundamental weight λj we now have a function Aj+1 in O(Lλj). For a dominant
weight λ =∑
kjλj we have that
f =
n−1∏
j=1
Akj
j+1
is a function in O(Lλ). This means that f is a highest weight vector with highest weight λ.
In this section we have proven the following theorem:
Theorem 3.6.1 (Borel-Weil for SL(n,C)). Every irreducible representation of SL(n,C) is isomor-phic to the left regular representation of SL(n,C) on the space O(Lλ)∼=O(GC,C, ξλ) for a uniquedominant weight λ.
In particular, every representation of SL(n,C) is uniquely characterized by a k ∈ {k ∈ Zn≥0 |
kj ≥ kj+1 }.
Example 6. In our proof it was already clear that the functions Aj are highest weight vectors forthe weight λ. We can also direcly verify that the Aj are highest weight vectors.
To show this we need to look at the representation π∗, which is defined by π∗ = Teπ. We provethat Aj is an element of the weight space
Vλj= { f ∈ O(SL(n,C),C, χj) | π∗(X)f = λj(X)f, ∀X ∈ h }.
28

We have for z ∈ SL(,C) and X ∈ H :
[π∗(X)Aj ](z) =d
dt
∣
∣
∣
∣
t=0
π(exp tX)Aj(z) =d
dt
∣
∣
∣
∣
t=0
Aj(exp(−tX)z)
=∑
k,l
∂Aj
∂zkl(−Xz)kl
=∑
k,l≥j
(−1)k+l det
zj,j . . . zj,k−1 zj,k+1 . . . zj,n...
......
...zk−1,j . . . zk−1,k−1 zk−1,k+1 . . . zk−1,n
zk+1,j . . . zk+1,k−1 zk+1,k+1 . . . zk+1,n
......
......
zn,j . . . zn,k−1 zn,k+1 . . . zn,n
(−Xkkzkl)
= −∑
k≥j
Xkk
∑
l≥j
(−1)k+lzkl det
zj,j . . . zj,k−1 zj,k+1 . . . zj,n...
......
...zk−1,j . . . zk−1,k−1 zk−1,k+1 . . . zk−1,n
zk+1,j . . . zk+1,k−1 zk+1,k+1 . . . zk+1,n
......
......
zn,j . . . zn,k−1 zn,k+1 . . . zn,n
= −∑
k≥j
Xkk det
zj,j . . . zj,n...
. . ....
zn,j . . . zn,n
= −∑
k≥j
XkkAj(z) = (∑
k<j
Xkk)Aj(z) = λj(X)Aj(z).
This means that Aj ∈ Vλj, so Aj is a highest weight vector for the weight λj .
Example 7. As a short example, we will construct a highest weight vector of the representation ofSL(3,C) in the space O(SL(3,C),C, ξ) where ξ is the representation corresponding to the dominantweight µ defined by
µ :
X1 0 00 X2 00 0 X3
→ 3X1 + 2X2.
For SL(3,C) there are two fundamental weights λ1 and λ2 defined by λj(X) =∑j
k=1Xk. Wehave µ = λ1 + 2λ2. The characters are
ξ1 : t =
t1 0 0∗ t2 0∗ ∗ t3
→ t1,
ξ2 : t→ t1t2,
ξ = ξ1ξ22 : t→ t31t
22.
As before we can define the functions Aj as subdeterminants of a matrix.
A1(x) = detx = 1,
A2(x) = det ( x22 x23
x32 x33) = x22x33 − x32x23,
A3(x) = det(
x33)
= x33.
29

For a matrix(
a 0 0b c 0d e f
)
∈ B we have A1(xh) = A1(x) = 1, A2(xh) = cfA2(x) = a−1A2(x) and
A3(xh) = fA3(x) = (ac)−1A3(x). If we define
g(x) = (A2A23)(x) = x233(x22x33 − x32x23)
then g(xh) = ξ(h)−1g(x). It is also not difficult to show that g is a highest weight vector withweight µ.
3.7 The Borel-Weil theorem in the general case
In this section we present an outline of the proof of the Borel-Weil theorem in a more general casesuch as it is given in [4]. There are however many variations on the proof and the statement ofthe theorem.
Theorem 3.7.1 (Borel-Weil). Let G be a compact connected Lie group, T a maximal torus in G.For every weight λ define the subgroup B and the holomorphic line bundle Lλ as in (3.2). Let πλbe the representation of G (or GC) on O(GC/B,Lλ) defined by left translation.
Then the representation πλ is non-trivial (O(GC/B,Lλ) 6= 0) if and only if λ is a dominantweight. If λ is dominant, then πλ defines an irreducible representation of G with highest weight λ.
Outline of proof of the Borel-Weil theorem. In the proof we will make use of the highest weighttheorem (theorem 3.3.3). First take g to be the Lie algebra of G. Let GC be the complexificationof G and gC the complexification of g. Take t = Lie(T ) and h = tC. Fix a choice of positive rootsP . Define n = ⊕α>0gα and b = h⊕α>0 g−α. Take N and B = B− to be the subgroups of GC withLie algebras n and b respectively. Now we have introduced the notation that will be used, we canbegin with the proof.
• If G is simply connected we can indentify the representations of G and the holomorphicrepresentations of GC by using theorem 3.2.2. If G is not simply connected the situation isa bit more complicated and it requires more work to show that the representations of G andGC are equivalent. We refer to [4, Lemma 5.7] for the details.
• First note that for every weight λ we can construct the line bundle Lλ defined by (3.2). Inthe space of holomorphic sections of Lλ we have a representation π = πλ of GC defined byformula (2.1). This representation is irreducible, the proof is analogous to the proof for thecase of SL(n,C). We assume π is non-trivial, so we can take a non-zero section s ∈ O(Lλ)
N .To this section corresponds a function f ∈ O(G,C, ξλ). This function is invariant under theaction of N and is equivariant under the action of B. So this function is uniquely determinedon the set NB by its value in e. By theorem 3.5.1 the function is now uniquely determined onthe entire GC by its value on e. This means that the mapping ev : O(Lλ)
N → C : s → s(e)is injective, so dimO(Lλ)
N ≤ 1. By theorem 3.4.1 the representation π is irreducible.
• By the highest-weight theorem there is an irreducible representation (ρ, V ) of G with highestweight λ for every dominant weight λ. This representation can be chosen unitary for an innerproduct on V because G is compact. From now on we assume such an inner product 〈·, ·〉to be chosen. We can extend this representation to a holomorphic representation ρ of GC inV using theorem 3.2.2.
Now suppose vλ is a dominant weight for ρ. We can define the mapping
T : V → O(G) : v → ψv (3.3)
where ψv is defined by
ψv(x) = 〈ρ(x)−1v, vλ〉.
One can prove the following properties of the map T :
30

– T is linear and injective.
– Every function ψv satisfies ψv(xh) = ξλ(h)−1ψv(x) for x ∈ G and h ∈ B. This means
that T is in fact a map V → O(Lλ) = O(G,C, ξλ).
– For x ∈ G we have π(x)ψv = ψρ(x)v so T is a mapping intertwining the actions of ρand π.
• Because T intertwines the actions, the image of T in O(Lλ) is an irreducible subspace ofO(Lλ) which is invariant under the action of G. Because the space O(Lλ) is irreducible wemust have ImT = {0} or ImT = O(Lλ). It is easy to see that ImT 6= {0} (just look atT (vλ) = ψvλ), and therefore ImT = O(Lλ). The mapping T is thus a bijective mappingfrom V onto O(Lλ) and it intertwines the actions of ρ and π. This means that (ρ, V ) and(π,O(Lλ)) are equivalent representations.
• We have proven that (ρ, V ) and (π,O(Lλ)) are equivalent, so π is an irreducible representa-tion with highest weight λ. This completes the proof.
31

Appendix A
Basic definitions
A.1 Complex manifolds
In this section we give some basic definitions of complex manifolds. Most of these definitions aretaken from [3]. The easiest way to think of a complex manifold is as a smooth (C∞) manifold whichis locally homeomorphic to C
n instead of Rn and for which all the coordinate transformations areanalytic (holomorphic) functions. With this in mind we can define a complex manifold.
Definition A.1.1. A smooth manifold X of dimension 2n is called a complex analytic manifoldof complex dimension n if there is a family F of homeomophisms κ, called complex analyticcoordinate systems, op open sets Xκ ⊂ X onto open sets Xκ ⊂ C
n such that
(i) If κ, κ′ ∈ F then the mapping
κ′κ−1 : κ(Xκ ∩Xκ′) → κ′(Xκ ∩Xκ′)
is analytic.
(ii) The union of all Xκ for κ ∈ F is equal to X .
We can now define what holomorphic mappings and function are on a complex manifold justas for a Cr manifold we can define Cr functions and mappings.
Definition A.1.2. Let X1 and X2 be complex analytic manifolds. Then a mapping f : X1 → X2
is called analytic if κ2 ◦ f ◦ κ−11 is analytic (where is is defined) for all coordinate systems κ1 in
X1 and κ2 in X2.
An analytic function on a complex analytic manifold X is just an analytic mapping from Xto C (which is cleary a complex analytic manifold). For complex manifolds we can define otherconcepts such as submanifolds in a way similar to the case of real manifolds.
A.2 Complex Lie groups and Lie algebras
Definition A.2.1. A (complex) Lie group is a smooth (complex) manifold G that is at the sametime a groupG for which the group operations (x, y) → xy and x→ x−1 are smooth (holomorphic).
32

References
[1] J.J. Duistermaat and J.A.C. Kolk. Lie groups. Springer-Verlag, 2000.
[2] R.E. Greene and S.G. Krantz. Function theory of one complex variable. John Wiley & SonsInc., 1997.
[3] Lars Hormander. An Introduction to Complex Analysis in several variables. North-HollandPublishing Company, 1973.
[4] Anthony W. Knapp. Representation Theory of Semisimple Groups. Princeton University Press,1986.
[5] Anthony W. Knapp. Lie Groups Beyond an Introduction. Birkhauser, 1996.
[6] A.A. Krillov, editor. Lie groups and Lie algebras. Akademiai Kiado, 1985.
[7] J.R. Munkres. Topology, a first course. Prentice-Hall Inc., 1975.
[8] Jean-Pierre Serre. Algebres de Lie simi-simples complexes. W.A.Benjamin Inc., 1966.
[9] Erik P. van den Ban. Lecture notes on lie groups. http://www.math.uu.nl/people/ban, 2000.
33