Embed Size (px)
Citation preview

Bulletin ofMathematicalBiology Vol. 45, No. 6, pp. 991-1004, 1983. Printed in Great Britain
0092-8240/8353.00 + 0.00 Pergamon Press Ltd.
© 1983 Society for Mathematical Biology
T H E T R A D E - O F F B E T W E E N M U T U A L I N T E R F E R E N C E A N D T I M E L A G S IN P R E D A T O R - P R E Y S Y S T E M S ?
• H.I. FREEDMAN and V. SREE HARI RAO~ Department of Mathematics, University of Alberta, Edmonton, Alberta, Canada T6G 2G1
We presen t a Gause p r e d a t o r - p r e y mode l i nco rpo ra t i ng m u t u a l i n t e r f e r ence a m o n g preda to rs , a d e n s i t y - d e p e n d e n t p r e d a t o r dea th ra te and a t ime lag due to ges ta t ion. I t is well k n o w n t h a t m u t u a l i n t e r f e r ence is s tabi l izing, whereas t ime delays are destabil- izing. We show t h a t in c o m b i n i n g the two, a long t ime-lag usually, bu t n o t always, de- stabil izes the sys tem. We also show t h a t increas ing delays can cause a b i fu r ca t i on in to per iodic so lu t ions .
1. Introduction. There is much literature on predator-prey systems modeled as either a system of autonomous ordinary differential equations, a system of difference equations, a system of integrodifferential equations or a system of differential-difference equations [see Freedman (1980) and the references therein]. By including certain parameters or varying certain assumptions, these models can be made to simulate various types of bio- logical behavior. We note that some models incorporate mutual interference among the predators and/or density-dependent death rates. Others have incorporated time delays (both finite and infinite) in one or more of their functions. To the best of our knowledge none of the work to date has incorporated all of these considerations and analyzed the resulting stability.
Predator-prey models incorporating mutual interference were first pro- posed in Hassell (1971) and Rogers and Hassell (1974). A model incor- porating density-dependent death rates was considered by Levin (1977). Equilibrium stability in a predator-prey model incorporating both was analyzed in Freedman (1979). In general, it is found that either or both of these are stabilizing and that intersecting isoclines to the left of a maximum no longer necessarily mean instability of the equilibrium (see Rosenzweig and MacArthur, 1963).
Time delays of one type or another have been incorporated by many authors (see, e.g., Wangersky and Cunningham, 1957; Reddingius, 1963;
~Researeh for this paper was partly supported by the Natural Science and Engineering Council of Canada, grant No. NSERC A4823, and by a grant from the University Grants Commission, New Delhi, India, grant No. F. 23-1174/79 (S.R. II).
~: On leave from O smania University, Hyderabad-5 00007, India.
991

992 H.I . FREEDMAN AND V. SREE HARI RAO
Cooke and Yorke, 1973; May, 1973; Smith and Mead, 1974; Thingstad and Langeland, 1974; Bounds and Cushing, 1975; Cushing 1976a, b, c; Levin and May, 1976; Taylor and Sokal, 1976; Arditi e t al., 1977; Brauer, 1977; Veilleux, 1979; Adams e t al., 1980). In general it has been found that incorporating time lags is a destabilizing process, and that increasing the lag could cause a stable equilibrium to become unstable and/or cause popu- lations to oscillate (see, e.g., May, 1973; Taylor and Sokal, 1976; Veilleux, 1979; Adams et al., 1980).
In this paper we are interested in the interplay between the stabilizing effects of mutual interference and density-dependent predator death rate, and the destabilizing effects of time delays. We utilize a simple constant time lag in gestation, i.e. a time lag in converting predator into prey.
In the next section we propose the model to be analyzed. In Section 3 we state the conditions for the existence of equilibria and derive the char- acteristic equation related to their stability.
The sections following deal with instability, stability and bifurcation of the interior equilibrium respectively. The final section deals with a dis- cussion of the above results. Proofs of theorems are given in Appendix 1. Appendix 2 states and proves a required lemma of G. J. Butler.
Throughout this paper stable means asymptotically stable.
2. The Model. We propose for a model of predator-prey interactions with mutual interference, density-dependent predator death rate and time lag in gestation the following system of ordinary delay-differential equations
x ' ( t ) = x ( t ) g ( x ( t ) ) - - y ( t ) m p ( x ( t ) ) (2.1)
y ' ( t ) = y ( t ) (--s + c y ( t ) m-a p ( x ( t - - r)) - - q( ,v( t))) ,
where ' = d/d t , x ( t ) represents prey numbers at time t, y ( t ) represents pred- ator numbers at time t and the other parameters and functions are defined below.
The function g(x ) is the specific growth rate of the prey in the absence of predators. We assume the following properties (see Freedman, 1980, Ch. 1):
(i) g ( 0 ) > 0 , dg~<0. dx
(ii) 3 K > 0 ~ g(K) = O.
K is called the carrying capacity of the environment. A typical g(x ) would correspond to logistic growth, i.e. g(x ) = o~(1 - - x / K ) .
p(x) , the predator functional response, is assumed to satisfy (see Freed- man, 1980, Ch. 2)

TRADE-OFF IN PREDATOR-PREY SYSTEMS 993
dD (iii) p(0)=0, ~ > 0 .
dx
Typical functional responses found in the literature are p(x) = fix (Lotka- Volterra predation), p(x) = 13x/(a + x) (Holling type 2 response) or p(x) = 13(x/(a + x) ) v, where 3' > 1 (sigmoid or Holling type 3 response).
rn is the mutual interference constant as defined in Hassell (1971) and Rogers and Hassell (1974). We assume
(iv) 0 < m ~< 1.
s + q(y) is the predator specific death rate in the absence of prey. We assume that this increases the greater the number of predators, i.e.
(v) q(0) = 0, d__q_q ~> 0. dy
r is the time delay due to gestation, i.e. the delay in time for prey biomass to increase predator numbers. We think of r as a positive constant, although we will wish to see how the behavior of the solutions change as r changes.
We note that in the case r = 0 system (2.1) reduces to the system con- sidered in Freedman (1979).
We will assume throughout that solutions of system (2.1) ini t ia t ing in the first quadrant exist continuable for all t ~> 0 and are unique.
3. Equilibria. The existence and values of the equilibria for system (2.1) are the same as in the case when r = 0, and hence we note that Eo(0, 0) and Ea(K, 0) are always equilibria which are saddle points. We further suppose that the isoclines given by
ym = xg(x ) /p (x ) (3.1)
s + q(Y) = c y m - l p ( x )
intersect at one or more positive points E2(x*, y*). In the case r = 0, the stability of E2 was given in Freedman (1979). We are here interested in the case r > 0.
In order to do this we compute the variational system associated with (2.1) about E2
u'( t) = Hu( t ) + Nv( t ) (3.2)
v'(t) = Qu(t - r) + Rv(t) ,
where
g ~ x • - - dg(x*) + g(x*) __y.m dp(x*)
dx dx
N = - -rny*m-ap(x *) < 0 (3.3)

994 H.I. FREEDMAN AND V. SREE HARI RAO
Q = c Y * m dp(x*)> 0 dx
R = (m -- 1 )cy*m-ap(x *) - - y * dq(y*______) ~< 0. dy
Note that if m < 1 or ( d q ( y * ) ) / d y > 0 then R < 0. System (3.2) is equiva- lent to the equation
u"( t ) - - (H + R ) u ' ( t ) + H R u ( t ) - - N Q u ( t - - r) = 0. (3.4)
The characteristic equation, the sign of the real parts of the solutions of which determine the stability, corresponding to equation (3.4) is
3, 2 -- (H + R)3, + H R - - N Q e --rx = 0. (3.5)
Letting X = # + iv and separating real and imaginary parts gives the system of transcendental equations
122 -- v 2 - - (H + R )# + H R -- N Q e -ru cos rv = 0 (3.6)
2lay -- (H + R )v + NQ e -ru sin ~-v = 0.
The signs of those X satisfying (3.5) if 3̀ is real or the signs of those # satisfying (3.6) if X is complex determine the stability or instability of E2.
4. Instability Results . In this section we present results which lead to instability." The first results along this line extend instability results in the case of instability when r = 0.
THEOREM 4.1. Le t (i) H + R >~ 0 or (ii) H + R < 0 and H R < N Q . Then
E2 is unstable fo r all r > O.
In the case H + R > 0 E 2 is unstable for r = 0, and this state of affairs continues for positive delays.
If H + R = 0, then for r = 0 E2 may be stable or unstable. Second-order effects need to be examined in order to determine the stability (see Freedman, 1979). However, for r > 0 E2 is unstable.
I f H + R < 0 and H R < N Q , then E2 is unstable (saddle point) for r~> 0. We note in the above cases that instability is always preserved, and in
the cases where E2 is stable for r = 0 arbitrarily small delays are destabilizing. The next theorem deals with some cases where E2 is stable when r = 0.
THEOREM 4.2. Le t H + R < 0 and N Q <,HR < O. Then there ex~ists r* > 0 such that for r >~ r* equat ion (3.5) has a posi t ive root.

TRADE-OFF IN PREDATOR-PREY SYSTEMS 995
Of course, the implication of this theorem is that for sufficiently long delays E 2 will be unstable. We do not estimate the delay r for which E2 becomes unstable since it may do so for complex X, i.e. the real parts of X may become positive without X being real. However, for r large enough X itself must become real and positive.
Finally, we note that if H + R < 0 and HR > 0, there are no real positive X satisfying (3.5). Any instability results in this case are incorporated in the bifurcation results and will be presented in Section 6.
5. Stability Results. In this section we state two theorems giving conditions under which E2 will be asymptotically stable. The first of these theorems can be thought of as estimating the value of r under which stability holds.
THEOREM 5.1. Let H + R < 0 and NQ < HR < --NQ. Then E2 is asymp- totically stable for all values o f r satisfying 0 <~ r < (H + R )/NQ.
The above theorem gives an estimate of the stability region in r. Another way of viewing this is that for fixed r, if H + R is sufficiently negative, E2 will be asymptotically stable.
THEOREM 5.2. Let HR > --NQ. Then E2 is asymptotically stable for all r >~O.
This theorem shows that if HR is sufficiently positive, no delay, no matter how long, can destabilize E2.
6. A Bifurcation Theorem. In this section we state a theorem which shows that for an appropriate range of the fixed parameters, as r increases E 2 changes from a stable to an unstable equilibrium. As this change takes place E2 bifurcates into stable periodic limit cycles (Hopf bifurcation) (see Hale, 1977).
THEOREM 6.1. Let H + R < O, NQ < N R < --NQ. Then there exists ro > O, the smallest value o f r for which equations (3.6) have a solution such that g = O. For r < ro E2 is asymptotically stable. For r > r o E2 is unstable. Further, as r increases through ro E2 bifurcates into 'small-amplitude' periodic solutions, which are stable.
We note that in this range of the parameters E2 is stable when r -- 0. Also, we are outside the range of parameters in Theorem 5.2, where E2 remains stable for all r.
We could fix r and allow a combination of parameters, such as H, to

996 H.I . FREEDMAN AND V. SREE HARI RAO
vary and prove a similar theorem. However, the analysis would be con- siderably more complicated.
7. Discussion. In this paper we have stated and proved several theorems giving criteria for instability, stability and bifurcation of the interior equilibrium of a system of two ordinary differential equations modeling a predator-prey interaction with mutual interference of predators, density-dependent preda- tor death rate and a time delay due to gestation. Mutual interference is generally thought to be stabilizing, whereas time delays are thought to be destabilizing.
Here we have shown for the given system that if the equilibrium is un- stable without a time delay it will remain so for all time delays. We have also shown that if the equilibrium is stable with no time delay then for a large range of parameters a sufficiently large time delay will destabilize it, at which point the populations will fluctuate. However, if the mutual interference is sufficiently strong, we have shown that the equilibirum will remain stable, no matter how long a time delay there is.
In this paper we have taken the point of view of holding mutual inter- ference constant and varying the time delay in order to carry out the analysis. It would be of interest to take the opposite view. However, since the mutual interference affects the equilibrium values and the time delay does not, the analysis is considerably more difficult. We state that an open problem is to find the stability regions in the r -- rn plane in the case H + R < 0, NQ < HR < --NQ.
In conclusion, we note that time delays do not necessarily destabilize a predator-prey system if there are other stabilizing effects acting on the system.
The authors are indebted to Professor G. J. Butler of the University of Alberta for his kind permission to reproduce the material contained in Appendix 2, which he presented in a course on functional differential equations and which is as yet unpublished.
Proofs of Theorems. as
or
APPENDIX 1
Preliminary to proving the theorems, we rewrite equation (3.5)
X 2 - (H + R)X + HR --NQ =NQ(e -'r~' -- 1) (A.1)
fl(X) = f2(x).

TRADE-OFF IN PREDATOR-PREY SYSTEMS 997
-NQ I
(a)
-NQ
Z
f
(b)
-NG
(c)
X
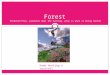
Figure 1. (a) P2 for small 7.. (b) 1" 2 for in termedia te r. (c) 1"~ for large 7-.
Let F / r ep resen t the graphs of z = 3~(3'), i = 1, 2, in the 3, - - z plane. 1̀ 1 is a parabola open upward. F~ for 7. • 0 has the fol lowing propert ies: 3~(0) = 0, l im f2(3') = --NQ > 0,
2t-++ ~
lim f2(3') = - - ~ , f '(3,) > 0, f ' (3 , ) < 0. Figure 1 shows F~ for small, in termediate and
large 7. respectively. Of course, at 7" = 0 F 2 is the 3,-axis.
Proof o f Theorem 4.1. We consider first the case that f1(3') has real roots. This will occur i f H + R > 0, and ei ther NR -- NQ <~ 0 or HR - - N Q > 0 and (H + R) 2 - - 4(HR --
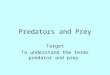
NQ)>I 0 ; H + R = 0 a n d H R - - N Q < ~ 0 ; o r H + R < 0 a n d H R < N Q . In that case it is clear that since the graph of 1"1 intersects the 3, axis in at least one non-negative value (Figure 1), I" 1 and P2 must intersect in at least one posit ive value, giving instabil i ty. For illustrative purposes, Figure 2a shows the case H + R > O, HR = NQ.
Suppose now that f1(3') has only complex roots. We then let 3, = # + iv and consider

998 H.I. FREEDMAN AND V. SREE HARI RAO Z (a)
Z
(b)
Figure 2. (a) Intersect ion of 1~1 and I~2 in the case H + R > 0, H R = NQ. (b) Real in tersect ion of I" 1 and P2 in the case f1(3,) has complex roots.
equations (3.6). If u = 0 is a solut ion of (3.6), then 3, is real and there must be a posit ive intersection of F1 and F2, as shown in Figure 2b. If v q= 0, then we let c t be the graph in the p -- v plane of the first o f equat ions (3.6) and c 2 be the graph of the second. Clearly, both graphs are symmetr ic about the ~ axis. We have established the theorem if we can show that cl and o2 intersect at a posit ive value o f # . By symmet ry we consider only v ~> 0.
The point (0, v0) lies on cl, where v0 is the unique posit ive solut ion of v ~ - H R +
N Q cos ~v = 0. Further , f rom (3.6) lira v = +oo on that branch of cl, Also, since v 4: 0, /2--.oo
v remains positive for all/~ > 0 on that branch o f t 1,
We now consider c 2 for pos i t ive / l values, c 2 is the graph of
sin rv 21.t - - ( H + R ) = - - N Q e - r v - - (A.2)
P
Clearly, for fixed v 2> 0 equat ion (A.2) has a posit ive value o f / 1 which satisfies it. In fact, for v = nrr/r, t.t = ( H + R ) / 2 (/>0 in the case f1(3,) has only complex roots). Fur ther , lira 0 = (H + R ) / 2 along c2. Hence c2 is the graph of an oscillating curve about the line
V-~+eo

\
TRADE-OFF IN PREDATOR-PREY SYSTEMS 999
H+R 2
/x
(a)
v
VO
02 yl #
(b)
Figure 3. (a) cl and 02 when 02 lies in the posit ive octant . (b) cl and e2 when e e intersects the u-axis.
p -- (H + R)/2. Further , the poin t (Po, 0) lies on 02, where Po is the unique posit ive solut ion of 2Po = H + R -- NQTe -r~o . Hence Po > (H + R )/2.
If 02 lies entirely in the first quadrant , then cl and 02 must intersect at a positive value o f /~ (see Figure 3a). I f not , let v* be the smallest posit ive value of p for which
g = 0 on 02. Then
(H + R)u* = NQ sin 7u*. (A.3)
I f H + R = 0, v* = zr/z. I f H + R > 0, p* = (NQ sin "Fp*)/(H + R). Since NQ ~ O, sin rP* < 0 ~ P* > Zr/T. However , Vo ~ zr/27 and so again Cl and 02
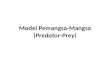
intersect at a posit ive p value. Q.E.D Proof o f Theorem 4.2. If HR = NQ, then F 1 and P2 intersect at the origin. We
compu te dz/d~, (0). On F1, dz/dX (0) = - - (H + R) , and on ['2, dz/d~t (0) = --NQT. Hence if T* > (H + R) /NQ, then for 7 ~> T* P2 crosses the origin inter ior to 1"1 and hence must intersect F1 at a posit ive X value (see Figure 4a).

t000 H. I. FREEDMAN AND V. SREE HARI RAO
(a)
{b)
Figure 4. (a) I ' 1 and P2 for H + R < O, HR = NQ, r > (H + R)/NQ. (b) Pl
and I" 2 f o r H + R < O, 0 > HR >NQ, r > r * .
If NQ < HR < 1, then H > 0, R < 0 and fl(X) has both roots with negative real parts, i.e. at T = 0 E2 is asymptotically stable. Choose 0 < $ < rain(H, (H -- R/2)) and r* > max ((ln(--NQ) -- in ~2)/(H -- ~), 0). Define
GOt) = X 2 -- ( g + R))t + _FIR -- NQe -rx . (A.4)
We have proved the theorem if we can show that for r > r* if(X) has a positive root. G(X) = H R - - NQ > 0 and G(+ ~) = +~ . Hence if we can find a X such that G(X) < 0, we have proved it. Let ~ = H -- ~ and r ~> 7-*. Then G(X) = (R --H)~ + ~2--NQe--r(H--~) < (R -- H)~ + 2~2< 0 by the choice of ~. Q.E.D
See Figure 4b for an illustration of the latter part of this consideration. Proof o f Theorem 5.1. We consider the equation (3.4) and the space of all real valued
continuous functions defined on [--% ~) satisfying the initial conditions u(t) = 0 for - 7 ~< t < 0, u(0 +) = K1 > 0 and u'(0 +) = K2 > 0.
Taking the Laplace transform of (3.4) and simplifying we get
Kls + K2 -- (H + R )K 1 L ( u ( s ) ) = L ( s ) =
s 2 -- (H + R)s 4- HR - -NQe ---rs"
The inverse Laplace transform of L(s) will have terms which increase exponentially with t if L(s) has any poles with positive real parts. Thus it is clear that a condition for the stability of E 2 is that all poles of L(s) have negative real parts. We apply the Nyquist criterion (see Thingstad and Langeland, 1974) to see whether L(s) has any poles in the right half plane. This criterion leads us to the conditions
Im F(iP0) > 0 (A.5)
Re F(iPo) = 0, (A.6)

TRADE-OFF IN PREDATOR-PREY SYSTEMS 1001
where F(s) = s 2 - - (H + R )s + H R - - N Q e --'rs and v o is the smallest posi t ive value of v for which (A.6) holds. F r o m (A.5) and (A.6) we have
H + R sin poT"
NQT" l,'or
and
po 2 = H R - - N Q cos Uor.
F r o m the h y p o t h e s e s and res t r ic t ing v o to 0 ~ P o d ~IT, we get
H R -- N Q > H R - - N Q cos PoT ~ H R + NQ.
Hence z = Vo 2 and z = H R -- N Q cos Pot in te resec t on 0 < Po < lr/r. Since (sin vor)/vor < 1 on 0 < pot < 7r if 0 ~ 7" < (H + R ) /NQ, t he Nyquis t c r i te r ion is satisfied. Q.E.D
P r o o f o f Theorem 5.2. Note t h a t H R ~ - - N Q ~ H < O, R < O, H + R ~ O, H R > NQ. F r o m equa t ions (3.6) , a t r = 0 we have
p2(0) - - p2(0) - - (H + R ) p ( 0 ) + H R - - N Q = 0 (A.7)
2p(0)v(0) - - (H + R)v(O) = O.
Ei the r p(O) = (H + R ) / 2 < 0 or v(0) = 0, in which c a s e / / ( 0 ) 2 - - (H + R) / / (0 ) + H R -- N Q = 0, giving p ( 0 ) < 0, where # (0 ) and v(0) are the real and imaginary parts of X at 7 - - 0 .
Hence for 7" posi t ive and suff ic ient ly small, by c o n t i n u i t y and G. J. But le r ' s l e m m a (see A p p e n d i x 2) p < 0. Suppose 37" o > 0 D p = 0 at 7" = to. Le t the so lu t ion to (3 .6) at r = ro be (0, Uo). T h e n f rom (3.6)
U2o-- H R = - - N Q cos to'go, (H + R)Po = N Q sin roT"o,
which u p o n squar ing and adding gives
(V2o-- H R ) 2 + (H + R)2vg = N2Q 2,
o r
v04 + (H 2 + R 2)Vg + (H2R 2 __ N 2 Q2) = O.
This implies t h a t v~ < 0, wh ich con t rad ic t s t he exis tence o f TO. Hence for all 7" ~> 0, /2 <~ 0. Q.E.D
P r o o f o f Theorem 6.1. We first show the ex is tence of the requ i red 7"o. Suppose p = 0, v = Vo satisfies equa t ions (3 .6) at r = to. Then (3 .6) reduces to
v~ - - H R + N Q cos 7"oVo = 0 (A.8)
(H + R )u o - - N Q sin %v o = 0.
E l imina t ing r0 by squar ing and adding gives
(Vo 2 - - H R ) 2 + (H 4- R )2Vo 2 - - N 2 Q 2 = O,
o r
l-'0 4 + ( H 2 + R 2 ) p 2 -'}- H2R 2 - - N 2 Q 2 ---- 0. ( A . 9 )
Since H2R 2 - - N 2 Q 2 ~ 0 by hypothes i s , there is a un ique posi t ive roo t for Vo 2 given by
/ )2= 1 __ 2 _ R 2 ) 2 1 ~{ (H + R 2 ) + [(H 2 +4N2Q21~ '} ,

1002 H.I. FREEDMAN AND V. SREE BARI RAO
giving
%/2 , i Vo = + - - { - - (H 2 + R 2) + [(H 2 - - R 2 ) 2 + 4N2Q 2 ] ~-}~-. (A.10)
2
We now solve (A.8) for 7-0. Subst i tut ing Vo = (NQ sin 7-oVo)/(H + R ) in to the first of equation (A.8) and using sineToVo = 1 - - cos27"0V0 gives
N 2 Q 2 c o s 2 T o P o - - N Q ( H + R ) 2 c O S T o P o + I - [ R ( H + R ) 2 - - N 2 Q 2 ~ - O . (A.11)
Let f ( z ) = N2QZz 2 -- N Q ( H + R)2z + H R ( H + R ) 2 - - N 2 Q 2, f (1 ) = (H + R)2 (HR - - N Q )
> 0, f ( - -1 ) = (H + R)2(HR + N Q ) < 0. Hence (A.1 I) has a real solut ion of the form cos TOP o = k, where Ik] < 1. F r o m (A.8) this solut ion in % is of the form % = Vo-larcsin (vo(H + R ) ) / N Q + 2nrr/Vo, n = O, 1, 2 . . . . . where we have chosen the positive value given by (A. 10). Hence the 7- 0 required by the theorem is obtained by choosing n = 0.
Clearly, for 7 = 0, E2 is stable. Hence, by G. J. Butler 's l emma (see Appendix 2), E2 remains stable for 7- < 7-0. We now show that for (dp/dT-), Iz-=_ % > 0 when v = v0, and this is true for n = 0, 1, 2 . . . . . This will imply that there is at least one eigenvalue with positive real part for ~" > 7-0, n = 0 and hence E2 will .be unstable for r > TO. Fur ther the conditions for Hopf b i furcat ion (see Hale, 1977) are then satisfied, giving the re- quired periodic solutions.
From (3.6), different iat ing with respect to 7- we get
[2p -- (H + R ) + NQTe - r u cos 7-v] d# + [-- 2v + NQTe - r u sin 7-v] dv d7 dT-
= N Q e -'r~ [--It COS TP-- P Sin Tv], (A.12)
[-- 2v + NQT-e-rUsin TV] dp + [2p -- (H + R ) + NQT-e - r u cos TV] dv dT- dT-
= N Q e - r ~ [# sin 7-v-- v cos TV].
At r = 70, v = Po,/2 = 0 we can solve for dp/dT-, giving
d/J] = NQvoAo I [ ( H + R ) sin T"oVo -- 2Po COS ToPo ] , (A.13)
I
d7 Iz=% ,v=v o ,~=0
where Ao = [NQTo cos 7-or o - - (H + R) ] 2 + [NQT-o sin ToVo -- 2v o] 2 > 0. Subst i tut ing for sin 7-oVo and cos TOVO from (A.8) in (A.13) gives
d/.t =/)gAol (H 2 @ g 2 "~ 2Po 2) > 0,
-~7 z=%,V=Vo,#= 0
completing the p roof of the theorem. Q.E.D
A P P E N D I X 2
In this appendix we state and prove an unpubl ished lemma of G. J. Butler, which is a special case of a more general result presented in a course on funct ional differential equations at the Universi ty of Alberta in 1982.

TRADE-OFF IN PREDATOR-PREY SYSTEMS 1003
G. J. BUTLER'S LEMMA. Let H + R ~ O, HR 2> NQ. Then the real parts o f solutions o f equation (3.5) are negative for 7- ~ To, where To 2> 0 is the smallest value for which there is a solution to (3.5) with real part zero.
Proof. Let f(3`, H, R, N, Q, r) = 3̀ 2 _ (H + R)3` + HR -- NQe - r x . Let 3,*(7-) be a solut ion of (3.5) for given 7-. We know that 3`*(0) exists and Re(X*(0)) < 0. Suppose that there exists 0 < 7-1 "( 7-o such that 3`*(7-1) exists and Re(3`*(7.1)) > 0 [Re(3`*(7-1)) ~ 0 by hypothesis] . We will obta in a contradict ion.
Thenf(3`*(Ta),H, R, N, Q, r l ) = 0. We compute
f~. (3` *(T1), H, R, N, Q, 7-1 ) = 23`*(7-1) - (H + R) + NQT-l e -rl h *(rl)
= 7-13`*(7-1) 2 + [2 - - (H + R)r l ] X*(rl) + [HRT-1 -- (H + R)] .
We note that if HR >/O, then
fx(3`*(7"1), H, R, N, Q, 7"1) v e 0,
for if it did, then 3`*(7"1) would have negative real parts. If HR "( 0, then it could happen that
fx(3`*(rl), H, R, N, Q, "Q) = 0.
If this does happen, we compute
fr(3`*(7"1),H, R, N, Q, 7-1) = NQ3`*(rl) e-rl?" *(rO 4= O,
and
fxx(X*(7-1), H, R, N, Q, 7-1) = 27-1X*(7-1) + 2 - (H + R)7"1 4 = 0
for otherwise X*(7"1) < 0 and we assume 3,*(7-1) has a positive real part. Hence using the implicit func t ion theorem [the classicai theorem in the case fx =~ 0
and a critical case analagous to one discussed in Freedman (1969) in the case fx --- 0] we can solve f(3`*, H, R, N, Q, 7-) = 0 for 3`* as a funct ion of T in a neighborhood of 7-a such that Re(3`*(7-)) 2> 0. Hence we can cont inue 3`*(T) as an arc in the complex plane with Re(3`*(7-)) 2> 0 as 7- decreases from 7-I to 0 unless for some value of 0 < 7- < 7-a, say 7- = 7"2, one of the following happens: (i) Re(X*(7-2)) = 0 or (ii) lX*(~'2)[ = +oo. We show these cannot occur as Re(3`*(r2)) = 0 contradicts the fact that ro is the smallest value of 7- for which Re(X*(7.)) -- 0 since 0 < 7.2 < ~'1 < 7-o- Fur ther , X*(7-2) satisfies
3 ` $ ( T 2 ) 2 - - (H + R)3`*(T2) -t- HR - -NQe -r2 x*(r2) = 0
or
13 `* ( • )1 1 X* (h ) - - (H+ R)I ~< [HR I + INQI < q-oo,
since Re 3`*(h) > 0. Then [X*(h)[ <~ + ~ and hence (ii) above cannot happen. Hence the Re(3`*(0)) 2> 0, which is the contradic t ion proving the lemma. Q.E.D
R E F E R E N C E S
Adams, V. D., D. L. De Angelis and R. A. Goldstein. 1980. "Stabil i ty Analysis of the Time Delay in a Host-Parasitoid Model." J. theor. Biol. 83, 43-62.

1004 H.I. FREEDMAN AND V. SREE HARI RAO
Arditi, R., J.-M. Abillon and J. Vieira da Silva. 1977. "The Effect of a Time-delay in a Predator-Prey Model." Math. Biosci. 33, 107-120.
Bellman, R. and K. L. Cooke. 1963. Differential-difference Equations. New York: Aca- demic Press.
Bounds, J. M. and J. M. Cushing. 1975. "On the Behavior of Solutions of Predator-Prey Equations with Hereditary Terms." Math. BioscL 26, 41-54.
Brauer, F. 1977. "'Periodic Solutions of Some Ecological Models." J. theor. Biol. 69, 143-152.
. 1979. "Characteristic Return Times for Harvested Population Models with Time Lag." Math. Biosci. 45 ,295-311 .
Cooke. K. L. and J. A. Yorke. 1973. "Some Equations Modelling Growth Processes and Gonorrhea Epidemics." Math. Biosci. 16, 75-101.
Cushing, J. M. 1976a. "Forced Asymptot ical ly Periodic Solutions of Predator-Prey Systems with or without Hereditary Effects." SIAM J. appl. Math. 30, 665-674.
- - . 1976b. "Periodic Solutions of Two Species Interaction Models with Lags." Math. BioseL 31, 143-156.
- - . 1976c. "Predator-Prey Interaction with Time Delays." J. math. Biol. 3, 369-380. Freedman, H. I. 1969. "The Implicit Funct ion Theorem in the Scalar Case." Can. math.
Bull. 12,721-732. - - . 1979. "Stabil i ty Analysis of a Predator-Prey System with Mutual Interference and
Density-dependent Death Rates." Bull math. Biol. 41, 67-78. 1980. Deterministic Mathematical Models in Population Ecology. New York:
Marcel Dekker. Hale, J. 1977. Theory o f Functional Differential Equations. New York: Springer Verlag. Hassell, M. P. 1971. "Mutual Interference between Searching Insect Parasites." J. A nim.
Ecol. 40, 473-486. Levin, S. A. 1977. "A More Functional Response to Predator-Prey Stabili ty." Am. Nat.
I l l , 381-383. - - and R. M. May. 1976. "A Note on Difference-delay Equations." Theor. pop. Biol.
9,178-187. May, R. M. 1973. "Time-delay versus Stabil i ty in Population Models with Two and Three
Trophic Levels." Ecology 54, 315-325. Reddingius, J. 1963. "A Mathematical Note on a Model of a Consumer-Food Relation
in which the Food is Continually Replaced." A cta biotheor. 16, 183-198. Rogers, D. J. and M. P. Hassell. 1974. "General Models for Insect Parasite and Predator
Searching Behaviour: Interference." Y. Anita. Ecol. 43 ,239-253 . Rosenzweig, M. L. and R. H. MacArthur. 1963. "Graphical Representation and Stabili ty
Conditions of Predator-Prey Interactions." Am. Nat. 47 ,209-223 . Smith, R. H. and R. Mead. 1974. "Age Structure and Stabili ty in Models of Prey-Predator
Systems." Theor. pop. Biol. 6, 308-322• Taylor, C. E. and R. R. Sokal. 1976. "Oscillations in Housefly Population Sizes due to
Time Lags." Ecology 57, 1060-1067. Thingstad, T. F. and T. I. Langeland. 1974. "Dynamics of Chemostat Culture: the Effect
of a Delay in Ceil Response." J. theor. Biol. 48 ,149-159 . Veilleux, B. G. 1979. "An Analysis of the Predatory Interaction between Paramecium
and Didinium." J. Anita. Ecol. 48 ,787-803 . Wangersky, P. J. and W. J. Cunningham. 1957. "Time Lag in Population Models." Cold
Spring Harb. Syrup. qual. Biol. 22 ,329-338 .
R E C E I V E D 9 - 1 4 - 8 2