Embed Size (px)
Citation preview

Pcrgamon Adv. Space Rcs. VoL 15, No. 4, pp. (4)163-(4)178.1995
Fated in c3lrazsG ‘“‘,“rzZ 0273-1177(94)ooo78-6 Y 0273-l ml9 $9.50 + o.oci
THE “LONG WAVELENGTH RADAR” ON THE MARS-94 ORBITER
E. Nielsen,* W. I. Axford,* T. Hagfors,* H. Kopka,* N. A. Armaud,** V. A. Andriauov,** D. Ja. Shtem** and T. Breus***
* Max-Planck-Institute fSir Aeronomie, D-341 1 Katlenburg-Landau, Germany ** Institute of Radio Engineering and Electronics, Russian Academy of Sciences, 103907 Moscow, Russia *** Space Research Institute, Russian Academy of Sciences, 117810 Moscow, Russia
ABSTRACT
On the Mars-94 mission a long wavelength radar will be deployed on the orbiter for the purpose of probing the
surface and sub-surface layers of the planet as well as the top-side of the Martisn ionosphere. The radar will
permit the study of the structure and electrophysical characteristica of the planetary regotith. The specific
goal is to determine the extent and depth of permafrost layers thought to exist. The altitude distribution, the
zenith angle variations and the solar wind dependence of the ionospheric eiectron density will be determined
witb the same radar for the purpose of assessing the influence of the planetary atmosphere and weak intrinsic
and/or induced magnetic iields on the interaction between the planet and the solar wind.
1. INTRODUCTION
‘l’he iuclusiorl of a long wavelength radar system (LWR) on MARS-94 offers unique opportunities for the
sl.udy of both Lhe surface structure of Mars and of the upper atmosphere of the planet. This long wavelenghth
radar will operate in the frequency range 0.17 to 4.93 MHz.
Since the Mariner 9 mission it has been clear that the surface of Mars is largely a dry desert, and not criss- crossed by a system of canals as believed by, Schiaparelli and Lowell. However, there is conclusive evidence that
this has not always been so. In fact there is ample geological evidence that water once flowed in abundance
over the sllrface of the planet. There are numerous channels on the surface which are often remarkably
similar to terrestrial rivers and flood features (McCauley et al., 1972; Masursky, 1973; Milton, 1973). There is
evidence that water still exists at some depth underneath the surface in the form of ice and ice-rock mixtures.
It is thought that the depth and properties of this buried ice layer may depend strongly on the latitude of
Mars (Kieffer et al., 1973; Farmer and Doms, 1979). If so, and if the LWR is sensitive to the presence of these
layers, one may expect to detect a latitude dependence, and bhus provide direct evidence for the presence
of water on the planet. in the form of buried ice layers. During daytime hours the electron densities in the
ionosphcrc are sufficiently high that they will screen the ground, totally or partly, from the radar signal.
However, at night the ionosphere will be nearly transparent, allowing the radar signals to be used to probe the planet itself. A more detailed discussion of the surface properties and of the schemes for the detection of
buried layers with the LWR will be given in Section 2.1.
Observations of the interaction of the upper atmosphere of the planet with the solar wind have provided
t*vidcru:c, suggesting that this interaction may have several possible forms, operating separately or in concert.
l:urthermore, the interaction may at any given time vary in nature across the obstacle. There are several
possible forms of this interaction. With an intrinsic magnetic field of the planet there may be a stand-off of the
solar wind by the magnetic field as in the caSe of the Earth. Such evidence has been presented by Gringauz
1,~ al., 1973 and by Dolginov, 1978. With a weak or negligible intrinsic planetary magnetic field it is possible
that there is an induced magnetic field caused by currents induced in the ionosphere. Such an ionospheric
obstacle lo tlw solar wind has been discussed by Russel et al., 1979. A third type of interaction with the solar wind is of a comtrt-like nature. 111 this case the solar wind is interacting directly with the neutral atmosphere
JAsll 15:4-L (4M3

(41164 E. Nic4m et al.
ol Mars through charge exchange between the atmospheric gas constituents and the solar wind protons. This
type of interaction also occurs at least at times in the atmosphere of Venus (Gringauz et al., 1986; Krymskii
and l3reus, 1988; Galeev, 1989). Further details both of the atmoepere-solar wind interaction concepts, and
of the study of the consequences of these concepts on the electron density profiles of the top-side ionosphere
as obscrvrd by the I,WR are given in Section ‘1.2 below.
%cl.ion :I provitlcns a hricf description of the experiment and of the analysis of the observational data expected.
2. SCIENTIFIC OBJECTIVES AND OBSERVATIONAL PRINCIPLES
‘1.1 Propertics of the Solid Surface
.Llars constitutes a body which can be considered intermediate in geological evolution between that of the
\IOOII and the Earth. As is the case for the Moon, Mars offers the possibility to interpret certain features
of the early history of the Earth. The low temperature of the surface aud the atmosphere of Mars leads lo
1 be forming of what may be termed a cryqlithosphere, extending from the poles to the equator in the form of
pcrlnafrosl. This cryolithosphere represents regions of cooled rocks which also include surface accumulation
0I’ slralir ill l.hc ~)oIar cap regions.
I.iquitl wa~.cr IIIOSL ccrtaiuly has cxistcd on Mars in the distant past, and there are suggestions that liquid
water may still exist under ice layers with a thickness determined by the ablation of water vapor into the
atmospberc (McKay and Stoker, 1989). For the current atmospheric conditions the ice thickness would have
to bc on the order of hundreds of meters.
(;round ice seems to be the most likely prospective reservoir of II10 on Mars. If it were possible lo determine
ihe total amount of water locked up as ground ice, then we may iearn much about the water inventory of the
planel.
III discussions of the distribution of ground ice one must consider the migration of the ice and the thermody-
namic stability. Both Fanale (1986) and Farmer and Doms (1979) concluded that ice is stable at the poles, but
not at the equator. I~anale and Doms calculated the region where ice can exist in thermodynamic equilibrium
and concluded lhsl no ice could exist in stable equilibrium above a depth of ten meters for latitudes below
abo111. .IU*. I:or llighcr latitudes the depth to the stability zone for ice decreases to zero at about 95” latitude.
I’videucc for the existence of subsurface ice is also presented by Squyres (1989). He studies the topography
01’ specilic l’caturos. atId in general concludes that their more rounded and smoothed character OII Mars, as
compared with similar features on the Moon, provides strong evidence of plastic deformation in the sub-
surl’acr. sllch as is lo be expected in the presence of ice.
It is I,c~lic~vc*tl, I.hcrcl’ore. that the upper surface of Mars is layered, that water ice plays an important part in
this layc’ring, and that the layered structure strongly depends on the latitude.
2.1 .I Observations of Reflections from the Surface
(‘onsidcr lirxt the Martian surface as a large sphere of radius a. Let the sphere be observed from an altitude
/I. ‘l’htr power rcceivcd back from the reflecting surface is given by:
where
P, =
1’ =
;* =
A =
“1’ =
It =
(1 =
R=
P~GAuT P~G’uTX’ PtA=m -=64r3h’= (4n)vl’ 4rh4Az
transmitter power
antenna gain
;G= antenna aperture
radar cross section =
distauce to target
radius of the planet
relieclivity of the surface

Mma-94Mla (4)165
‘1’1~ rcsclll is l.hat lhc received power becomes:
p = P,A2aa
I 4h2(a + h)zilz
R’
The parameter which is of direct physical interest in this model is the reflectivity R. For a homogeneous medium of complex dielectric constant c the reflectivity at normal incidence is:
The reflectivity usumes more complicated forms when there are surface irregularities, or when the electrical
properties vary with depth.
2. I .2 !JielecLric constanl
The dielectric constant is a complex number ,,
t = 6 + iE” (4)
where E” # 0 allows for non-zero conductivity in the Martian ground. Because of low loam we assume E z E’ > E”. The damping of the radio signal is given by 2xfdc’) tan(a”/c’)/c; and the skin-depth is (Stratton, 1941)
I’cttengill ct al. ( 1969) have discussed radar measurements of Mars, which allowed an estimate of the character ol the upper layers of the planet. They found the density ps to be 1.4 to 1.7 g/cm3 and the dielectric constant to be E’ = 3.5.
Analyzing materials thought to he representative of the upper hundred meters or so of the Moon, Olhoeft and Strangway (lY75) found the dieleclric constant, E’, to be related to the density, ps (in g/cm3), of the ground rrlaterials (soil or solid) by
6’ = (1.93 f 0.17)_
tan($) = O.OOGpo (6)
i.e. the dielectric constant increases exponentially with density. For values of PO between 1.7 and 3.35 g/cm3 I he dielectric constant falls between 3 and 9, and the skin-depth between 2000 and 600 meters at a frequency (,I 1 ILIHa. The frequency dependence of of both c’ and tan A, (A = a”/&‘) are slight at frequencies above I MHz and Lhe skin depth is, therefore, approximately proportional to the wavelength (Krupenio, 1980).
For pure water ice Paunder (1969) and Finkelshtein et al. (1977) found
E’ = 3.0 2.1 x 105
tan($) = -e ,+
/
where 7 = 0.101 C and where T ir the ice temperature in degrw C. Assuming an ice temperature of -30 C, I.he skin-depth becomes 2800 meters. In the realistic case the ice will be mixed with rocks ao that the above must be an upper estimate. Finkelshtein et al. (1977) found E’ = 3.7 and tan A = 0.18 for frozen earth type rnounlain rocks with a weight content of ice of 0.75, at a temperature of -10 C, at a frequency of 1 MHz leading to a skin-depth on the order of 150 meters.
Using ground radar measurements at 2 and 6 cm wavelength, Rudy et al. (1987) found that the very top layer (nbout 1 meter) of Mars has a dielectric conslant at most latitudes between 2 and 3.5, with subsurface densities between 1 and 2 g/ems. (See also Campbell and Ulrichs, 1969; Downs et al., 1975; Harmon and Ostro, 1985; Harmon et al., 1982).

E. Nielsen et al.
/\s we have seen above, owing to the very low temperatures at Mars a cryolithosphere is formed stretching
from the poles to equator, and composed of ices in the polar caps and permafrost possibly at all latitudes.
liuzrnin (1983) proposed a two layer model for the reflection from the outer layer of the planet. The top layer
is “dry frost rock” with a depth of 10 to 40 m at high latitudes and 300 to 400 m at low. Below there is a
layer of “frozen icy rock” with a depth of 600 to 2500 m at high latitudes and 500 to 800 m at equator. Below
these layers there may be wet rock and possibly liquid water layers.
As a first approximation to the multiple layer structure, consider a uniform double layer where the top layer
has a complex dielectric constant E, and a depth L, and the underlying supporting layer has a complex
dielectric constant ~2. In this case the reflectivity takes the form
?2 = Ri + R.$c~~ + 2R1 Rle-'coscp 1 -f- R: Rie-lr + 2 RI Rle-7coscp
with:
where cp is the phase path through the upper layer and back. The reflection coefficients are defined <as in the
c,ase of a semi-infinite half space as:
(Y)
It is clear that the reflection coefficient of the double layer can exhibit oscillations with frequency, that the
depth of these oscillations depends on the depth of the layer measured in wavelengths and the amount of
nttenuation in the top layer. In principle, therefore, certain conclusions may be drawn on the nature of the surface material from reflection measurements within a range of frequencies. It is evident that the reflection
coefficient is oscillating with minima occurring when the cosine term is minimum, i.e. the first minimum occurs
when the argument is 180”, resulting in a series of minima and maxima. From the locations of the minima
the thickness of the top layer can be determined and is given by X/4&, w ere X is the radar wavelength at h
the the first minimum.
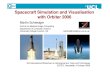
Figure la shows the reflection coefficient as a function of frequency for a fixed value of L =5Cl m, and for
;‘ , = 4 ami Ed = 8. ‘I’twse values of the dielectric constants were chosen as possible realistic values of the
Martian ground.
For large radar wavelengths, the limiting value of R’ is
Vor short radar wavelengths, assuming sufficient absorption, the reflection is determined by the top layer, and
t.hc rcllcc~ion takes the same form, except the dielectric constant .e2 is replaced by E,.
In practice it is unlikely that the clear-cut oscillations predicted by this model will ever be observed, because
one may expect a gradual transition of electrical properties with depth, or many more than one internal
interface (see Figure lb and lc). In addition, one may not be justified in assuming that the depth of the
layer. or the electrical properties for that matter, are constant over the lateral area sampled by the radar,
(orresponding to the central Fresnel zone, some kilometers in practice. The motion of the satellite over the
surface during the time it takes to go through the frequency range to establish the positions of the minima of the cycle time cau easily amount to several kilometers also, and will further blur the distinctive oscillating
properties of the reflectivity.
It seems appropriate to regard at least the depth of the layer as a statistical parameter subject to a probability
distribution, and analyze the results of the radar experiments with this in mind. Such procedure, as applied
LO lunar ochocs. has been described by Hagfors (1970) and more recently and in greater detail by D.D. Evans
1 i973).

(4)167
Fig. 1. a) Reflection coefkient versus frequency for a signal reflecting off a thin laya (50 m) with refractive index el =4 located on top of a half space with refractive index es=9. The values of the refractive indicies were obtained from Section 2.2.2.1 as possible for Mars. b) Reflection coetticient versus frequency as- suming a top layer with a width that is vari- ble between 0.8L and L. The width follows
a uniform probability distribution in that range of possible widths. c) R&e&ion coefficient versus frequency as- suming a top layer with a width that is vari- ble between 0 and L. The width follows a uni-
form probability distribution in that range of
possible widths. Note the more the width is
allowed to vary, the closer the variations are
to an S-curve; as one would expect.
On Mars one may expect distinctive and characteristic latitudinal and temporal variations due to frost, sub-
surface ice, moisture and wbler. This can substantially alter the reflectivity with time, as a function of latitude
and with solar zenith angle. The study of radar reflections from the Martian surface can, therefore, provide
new and very significant data on the nature of the planetary surface and subsurface. These data can supply
~.lues to I.hc spal.ial variations and the thickness distributions of frozen rocks and ice, the spatial structure of
!hc cryolil,llosp~tere. the limits of the heat liows at large depths and suggest regions where sub-surface layers
of water may exist.
2.2 Properties of the Martian Upper Atmosphere
The Martim ionosphere has been investigated by experiments on board several spacecraft (Mariner 4, 6, 7,
!J; Mars 2, 3, 4, 6; Viking I, 2; and Phobos 2). The Viking spacecraft made the only available in situ plasma
measurements during their descent to the surface (Hanson et al., 1977). Radio occultation measurements
were made with the Mars 2, 3, 4 and 6, the Mariner 4, 6, 7 and 9 and with the Viking orbiter spacecraft.
In this technique a radio signal is transmitted from the spacecraft and propagates “tangentially” through
lhr ionosphere to he received at the Earth; it yields information about the average behavior of the vertical
r+ctron density variations (Kliore et al., 1973; Linda1 et al., 1979), but on the assumption that the ionosphere
is essentially spherically layered in lhe region the rays transit. The method therefore works poorly near the
terminator, and the sensitivity appears to be limited to electron densities higher than 10’ cme3. Because
Mars is an exterior planet, no radio-occultation measurements at solar zenith angles less than about 45” are
possible (Kliorc, 1992).
The spatial coverage of actual plasma density measurements at Mars is therefore limited lo fairly large
zenith angles, and hccause lhe radio occultalion technique yields measurements of inherently poor spatial
and temporal resolution, our knowledge of the Martian ionosphere is still rudimentary. The radio occultation
technique wilh ils limited sensitivity is mainly sensitive to the dayside ionosphere and is insensitive to the
very low densities at the top of the ionosphere. Furthermore, according to McCormick and Whitten (1972)
and Pirraglia and Cross (1970) the assumption of spherical symmetry normally made in the analysis leads
LO errors Ihal hecornc the more pronounced the smaller the planet, the hotter the ionosphere, and the larger
the anglr I~etwecn lhc spacecraft orbit plane and the Earth-planet direction. For a hot Martian ionosphere with curvature smaller than the Earth, observed with Mars 2 and Mariner 9 (inclinations of 40” and 65” respectively) the errors could be an order of magnitude.

(4)168 BNiclsennal.
From radio occultation data Hantrch and Bauer (1990) and Bsuer and Hantsch (1989) determined the peak electron density and the peak altitude as a function of zenith augle (using extrapolations) and solar radio flux. hrther. they found the plasma scale height in the lower and upper ionosphere as a function of solar radio Ilux. From thir rcwlts we have made au “empirical model” of the Martian electron dcosity variations; Figure 2 displayn cxarnplca of rrpproximatc electron density altitude profiles for some representative ~erlith angles aud solar radio fluxes.
There are many in situ obwrvations by plasma probes which also contribute to our prcscnt knowledge of the Martinn upper utmosphcrc (Brcus, 1992). Often, however, there arc problcmr with these observations, since they may confuse c&k which depend oa distance from the planet with zenith angle effects. It is also sometimes difficult to determine the position of the spacecraft with rcspcct to the various boundaries of the atmosphere ao that it may be hard to determine the spatial regime of a particulir obrcrvation.
Phyrical characteristics and “bat” estimates of scvcral key puametm for Mars (and for comparison also of the Earth) and the solar wind at the Mars orbit am given in Table 1. The table v&a of thermal prcaaurca were derived from a mixture of measured (electron densities, electron and ion tcmperaturcs) and predicted (electron temperatures) puaqctcn. Representative ion tcmpcratums arc taken from the Viking lander data (Hanson and Mantaa, 1988) and the electron densities from radio occultation data; the electron temperatures arc from model calculations by Chen et al. (1978) and by Rohrbaugh et al. (1979); this leads to a range of prcdictcd peak prcsnurcs. Also note that electron density measurements were only made for zenith angles larger than about W; comparing plasma prasurcs with the radial solar wind prcasurc at these large zenith angles (solar wind pruaure < P,xcosa4S) suggwt the possibility, that the thermal prasure is larger than the radial solar wind prcsnurc, and thus that the iodosphcric plasma alone cxcertr enough prcasurc to deflect the solar wind at least at large zenith angles @hank and Luhmann, 1992).
2.2.1 Ionospheric Measurements to be Made by the LWR
la view of the limited data available on the Martian ionosphere it would seem a natural development in the continued efforts to explore planetary ionospheres to invoke a technique, which would decidedly improve the spatial and temporal resolution, and which in the exploration of the Earth’s ionosphere has played such
an important role, namely the radar ionosonde technique. Ionospheric radars have provided better spatial coverage and more detailed data in almost every respect of the ionospheric plasma and the physical processes, lhau arty ot,her technique used in ionospheric research. On Mars the direct interaction of the solar wind with lllc ionosphere makes lhc top-side ionosphere of special interest.
Fig. 2. Electron density pro8lw in the Martian ionosphere. Solid - and dashed curvca arc for solar radio flux F,o_,~50, and NO, mpcctivdy. Index “a” and “b” rcfur to zenith angles 20’ and 80’, respectively.

lblam94orblm
TABLE 1 Physical puarna~era for Mars and the eolu wind
(4)169
MUlI Earth
Distance from Sun Radius Ma.SS Surface pressure Major gases
Major ions Magnetic dipole moment
Max. clactron density iu sub-solar region Peak thermal pressure at solar min. for zenith angles (x) Peak thermal pressure at solar max. for zenith angles (x)
Solar Wind: Speed Density Prolou lemp. Electron temp. Magnetic field
? Pressure: solar min., P,= solar max., P,=
Bow shock alt. (sub-solar)
1.5 AU R#3390 km 6.4x lo= kg
6mbU
CO,=95.3% N,=2.5%
< 2?IO1’ .., 2.5 x LO*’
2.4 x 10s crnV3
x > 45’ from 0.8 to 1.8x10-s dyn cm-’
x >d5” from 1.0 to 2.0x10-s dyn cm-’
400 km/r 400 km/s 4 crnm3 10 crne3
2.4~10” 3.3x 10’0 1oso 1.3x 105O
3 nT 5 nT
1.8 2.2
1.5x10-s dyn crne3 1.0x 10-s dyn crne3
1700 km (=1.5 Rm)
6.6x 10-s dyn crne3 4.8x 10-s dyn cmV3
63700 km
(=I0 rt)
1.0 AU R,=6371 km 59.8x 10” kg
1013 mbar N,=78% 0*=21% O+, NO+
8x10” G cm3
(from Zhang and Luhmann, 1992; Luhmann and Brace, 1991)
The LWR is a top-side sounder. It is sensitive to a much smaller horimntal spatial scale than the radio occultation technique, and will have improved altitude coverage and resolution as well as improved temporal resolution. It is superior to the in situ observations in that the data instantaneously cover a range of heights rather than a single point at the spacecraft orbit. The possible spatial coverage will depend on the finally selected orbit for the Mars-94 mission; with the currently envisaged orbit measurements for zenith angles bctwecu zero and 180° will be possible. The lowest altitude of the MU6-94 orbiter will be 2 300 km. The spacecraft trajectory will therefore not pass through the ionosphere “proper” and thus no in situ plaama
measurements will be made on this mission. Information about the ionosphere will only be obtained owing to the remote sensing properties of the LWR experiment.
The reflected power from the ionophere is determined as for the case of reflection from the surface by Equation (I), but wit.h a reflection coeliicient equal lo unity. This fact will be used in calibrating the radar for the purpose of detcrrniniug the ground reflectivity.
To avoid use of the high peak power necessary in a short-pulse radar, the LWR usea long pulses together with pulse compression in the receiver. This allows the radar to achieve large radiated energy, and simultaneously to obtain a range resolution compatible with a short pulse. The modulation used for pulse compression is linear frequency modulation. The sweep is made by varying the transmitter frequency linearly through dF ( I5 kHz), centered on a frequency between 0.17 and 4.93 MHz during a time t,, which is typically 1 ms. The dilferencc I’requcncg bc?1wee11 the transmitted and the received signals, /d is proportional lo the group delay of the return al that center frequency. The “virtual” distance to the reflection is given by:
(11)

(4)170 E Nielson u al.
II ~IICW arc s~c~.aI rcllrctiou regions in the ionosphere, as is the case duriug spread-F conditions in the Earth’s
ionosphcrc. the spectrum will spread corresponding to the range of delayr.
The rauge resolution, dD, is determined by the frequency resolution Af, and is given by
dD = c/(2dP)t,Af (12)
[:or a frequency modulation lime of 1, =l ms, and an inter-pulse period of 3 ms (the spectral resolution is
A/ =1000/S Ihj, giving MI ideal range resolution of dD = 1.7 km.
The range of frequencies of the radar permits observations of densities between 400 and 3.0 x lo5 cm-‘. Using
tbe above mentioned “empirical model” of the Mars ionosphere, Figure 3 shows an example of what the radar
measurements may look like. The Figure displays several ionograms, where the reflection frequency is shown
as s function of the (virtual) distance from the radar. A spacecraft altitude of 2000 km and a constant electron
density hctwrcn t.hc spacecraft and the top ionosphere of 10 cme3, was assumed.
The observed virtual dela$as a function of frequency must be converted to plasma density versus height by
one of the conversion techniques used in the interpretation of ionograms (Zhang et al., 1990). The analysis is
simpler for the Martian ionosphere because the magnetic field is so weak that the double refraction which is
important in the Earth’s ionosphere, can be neglected.
On the Mars-94 orbiter there will also be plasma and magnetic field experiments which can provide measure-
ments of thr solar wind. Even if not all experiments can be operated simultaneously, solar wind parameters
can be measured in close proximity to the ionospheric radar measurements, such that the actual solar wind
parameters can be used to evaluate the ionospheric measurements, rather than average values as has been
used in lhe ptut.
2.2.2 Scicrltific I’roblerns to be Adressed
OI major importance in the study of the uppermost layers of the atmosphere of Mars is the nature of the
interaction of the ionosphere with the solar wind. Mars differs from the Earth in having a much weaker
intrinsic magnetic field, see Table 1. Whereas the intrinsic magnetic field of the Earth is strong enough to
hold oil the solar wind pressure, this may only be the case with Mars, when (and where) the pressure excerted
1)~ t,lle solar wind is very weak. Here, more typically, the induced magnetic field may serve to hold off the
solar wind and provide the deflecting forces. There may also be a combination of these two, with the induced
magnetic field being the controlling factor at small zenith angles and the intrinsic fields at larger zenith angles.
There is also the possibility that a comet-like interaction takes place in which the mass loading and deflection
of the solar wind takes place through charge exchange collisions between the solar wind proton plasma and
the near stationary atmospheric gases of heavier molecules.
=* LWR-Ionogram **
?tw 10000 Fmquenc~, 10-3 kHz
Pig. 3. Ionograma of Mars top-side ionosphere; same signatures as in Figure 2.

h4a&4orbiter (4)171
The various physical mechanisms for interaction with the solar wind will give rise to differing top-side electron
density profiles, and different zenith angle dependencies for the different model. Furthermore, it might be
that the solar wind intensity will determine the type of interaction which actually takes place at different
regions of the obstacles.
In case the intrinsic magnetic field is very weak, the wind is d&&d through the formation of a magnetic
barrier at the top of the ionosphere. The solar wind magnetic field lines are “piling up” in the sub-solar region
of the planet forming a region in which the total solar wind pressure is transfdrmed into a large magnetic
pressure, creating a magnetic barrier against the ionosphere and balancing the ionosphuic pressures (Johnson
and Hanson, 1979; Phillips et al., 1984, 1988). In the barrier region currents are generated that produce
J’ x s’ forces directed such as to decelerate, defiect and accelerate the solar wind around the obstacle. The
ionospheric and solar wind plasma in the barrier region is forced out of the region of strong magnetic pressures
and flow along magnetic field lines to be removed by the solar wind; this leads to an abrupt plasma density
decrease at the top of the ionosphere, refered to as the “ionopause” (Zhang et al., 1991). If the ionopause
forms at low altitudes, collisional effects would further complicate the process.
In the radar data this would appear as a sudden sharp decrease of electron densities at the top of the
ionosphere. An ionopause has been observed at Venus, but not so far at Mars. Axford (1991) suggested the
possibility that the absence of an ionopause at Mars may indicate the presence of a (weak) intrinsic magnetic
field.
The ionopause is not expected to form a definite demarkation between the solar wind and the ionosphere.
When the solar wind pressures are larger than the ionospheric thermal pressure, it is predicted that magnetic
held llux From the barrier region is partly convecting and partly diffusing into and down (provided the magnetic
held below the ionosphere is less than the field at the top, at the barrier) through the ionosphere to altitudes
where the field is dissipated in Ohmic losses (Axford, 1972; Cravens and Shinagawa, 1991; Shinagawa and
Cravens, 1988, 1989). The magnetic field magnitude at the top of the ionosphere is expected to be of the
order of 50 n’l’. It is the combined pressures of the ionospheric plasma and the induced magnetic field (plus
the intrinsic field) that holds off the solar wind. Owing to the presence of an induced horizontal magnetic
lirld vertical transport is inhibited, and Shinagawa and Cravens (1989) showed that this would have the effect
ol’ strongly reducing the ion densities at high altitudes (relative to the non-magnetized case). The electron
densities in the sub-solar region could also be reduced owing the horizontal transport effects. Shinagawa
and Cravens (1989) found that the induced maguetic held strength is reduced with increasing zenith angle,
and thus the associated magnetic pressure gradient in the top ionosphere is expected lo transport plasma
away from the sub-solar area, leading to a further strong decrease in plasma densities in that region of the
ionosphere. Al lower altitudes where photochemical processes and diffusive equilibrium, rather than transport,
arc dominating, the measured deusities are well predicted. The most outstanding difference between the
observed and predicted densities, are the very low observed densities of O+ (and of electron densities) at high
altitudes. It remains a key problem in understanding Mars’s ionosphere to account for the densities in the
upper ionosphere; they are governed by the solar wind interaction with the planet’s ionosphere and possibly
influenced by an intrinsic magnetic field.
‘l’hc solar wind may cxccrt sulficierrt pressure in the sub-solar region to induce a magnetic field there, while I he thermal plasma pressure would be sufficient to hold off the solar wind for larger zenith angles. Since the
thermal pressure decreases as the square root of the cosine to the zenith angle, one can determine that the
region of induced magnetic field is limited by a zenith angle, 0, which has a cosine to the power of 3/2 equal lo the ratio between the thermal pressure in the sub solar point, PO,,,,,,, and the dynamic solar wind pressure,
P dyn,.,v, (Krymskii, 1992). Thus, the plasma pressure of the ionosphere is sufficient to balance the pressure of
the solar wind when
while at smaller zenith angles the forces of an induced magnetic field add lo the plasma pressure to deHect
the solar wind. If, on the other hand, an intrinsic magnetic field has a pressure, Pzi,,l, exceeding the plasma
prcssurc. then the condition for an induced magnetic field is
1’ dyvw PL?int
> cos-% (14)
white at larger zenith angles only the intrinsic field interacts with the solar wind. The expected influence of
solar activity on the Martiau ionosphere under assumption of a horizontal magnetic field within the ionosphere
is the subject of a forthcoming publication by Ureus aud Axford (1993).
The curved magnetic flux tubes pressing down on the dayside ionospheric plasma is an unstable system. It is
possible that owing to local inhomogeneities in the plasma/magnetic pressure flux tubes may penetrate into

(4) I72 E. Nielsen Ed al.
the ionosphere, to be further pulled downwards by the magnetic tension. Thus, flux tubes with low plasma
density may be embedded in the denser ionospheric plasma, and moving downwards. Bouyancy forces acting
on the lighter plasma could also be important; but magnetic stresses may prevail (Russell et al., 1979). This
is analogous. hllt opposite, to the well known phenomena of “bubble” formation in the Earth’s ionosphere,
whcrc low density plasma bubbles are rising in the equatorial ionosphere owing to bouyancy forces. Associated
with this penetration of ionosheath fields and plasma into the ionosphere may be “emissions” of ionospheric
plasma into the ionosheath, where it is carried down the tail in the form of detached plasma clouds. Such
processes may occur when the solar wind pressure is varying in time; furthermore, during such times detached
plasma and wave activity near the ionopause have been observed (Brace et al., 1980).
In ad&lion lo the “steady state” altitude profile of plasma frequencies, the Martian ionosphere may produce
ellecls similar lo spreacl-F, i.e. at a given -frequency there may be reflections from several ranges. This
may occur in association with the above mentioned “bubble’‘-formation, with detached plasma structures,
with plasma streamers, and with wave activity on the ionopause. The LWR electron density profiles will be
sensitive to all of these phenomena.
‘l’he la&~. analysis of the,Martian magnetic dipole moment, using Phobos 2 data (Grafe, 1992), observed
11, 1.0 I)I~ weak, Inaybc: equal lo O.G9x 1O1* ‘l’m”. In cast Mars should have an intrinsic magnetic field, it has
heen suggested that magnetic field line merging may occur betwen the intrinsic field and the field induced
hy the interaction with the solar wind (Axford, 1991). Provided the intrinsic magnetic field is numerically
less than the magnetic field in the lop of the ionosphere (the intrinsic field is for example oppositely directed
1.0 and nurnericnlly less than the intrinsic), the induced magnetic field is transported downward with the
ionospheric plasma, into a region or intrinsic magnetic field where the plasma from the lower ionosphere is
transported upwards (Axford, 1972; Shinagawa and Cravens, 1992). In such a region, where magnetic fields
with opposite cornponcnts encounter, the possibility for magnetic merging, or magnetic field annihilation, may
exist (Axford, 1991). Because the altitudes where this is expected to happen are so low that Ohmic losses are
qignificant, existing “merging” theories are not applicable. This idea opens the possibility of energetic particle
production inside the iooosphere, and also that magnetospheric convection may play a role in forming the
.Martian ionosphere. The latter might imply that plasma from a magnetospheric tail is transported towards
Mars to increase the density in the nightside ionosphere.
Shinagawa and Cravens (1992) f ound that the steady state plasma density is somewhat enhanced in the
altitude rcgiou on which the plasma Rows converge, producing a secondary peak in the vertical density
variation. The radar may be able lo resolve this peak. In case of “merging” processes plasma density liuctuations in space and time may follow, which could also cause spread-l? signatures in the radar data.
It is, t.herrfore, clear that there is a rich plethora of possible physical phenornena to be expected in the
Martial1 atmosplrcrc. Most of these are poorly understood, or not understood at all. A good insight into
l.hese phenomena is required for an understanding of the interaction of the solar wind and the Martian upper
atmosphere. The LWR will be an important tool to provide the data needed to answer some of the questions
summarized above.
3. BRIEF DESCRIPTION OF THE EXPERIMENTAL SET-UP
3.1 Overview or the Operations
The Long Wavelength Radar (LWR) experiment is described in detail in Shtern (1989).
‘I’he radar can operate at 56 discrete frequencies in the range from 0.17 to 4.93 MHz. The pulse repetition
I’requency (I’RF) will IK variable from 156 lo 624 Hz and will be adjusted so as to ensure that the reflected
signals al,rivr at the radar during transmitter ofF times. The first cycle in an experiment (see below) can
he used lo optimize the PRF for the actual spacecraft-target range; alternatively the choice of PRF may be
determined from calculations based OII expected target locations and given spacecraft position in orbit.
‘Table 2 lists possible “timing” and “operating” modes of the radar. The basic time unit of the radar is “the
scan”, the time the transmitter is “on" plus the time it is “off” before being turned on again; typical values are
TX,,,= I 111s and TX,,,,=2 rns. t)uling ‘La burst”, which in Timing Mode I is fixed at Tb=0.27 s and in l’ilning
1h4otlc II at ‘I’b=l.W s, the scan is repcatcd a uuulber ol times determined by the PRF and the burst lime,
~~=‘l’~xl’ItF. t)uring a burst the discrete center frequency is constant, and the actual transmitter frequency
may either be constant (Mode A) or be linearly modulated over 15 kHz (Mode B). The receiver output is
digitized, starting at the beginning of a burst, at a rate, which for each timing mode is constant, and in
Timing Mode I yictds 2048 samples and in ‘Timing Mode II 1024 samples during a burst. Some data samples
may occur during the transmission, in which case the sample value will be close to zero, since the receiver is
disconnected from the autenna during that time. At the end of a burst the data samples are processed in a
special processor unit 1.0 determine the received signal intensity (Mode A) for reflectivity measurements, and,
[or Mode B, a FFT is performed to determine the received power spectrum for determination of the distance
to the ionospheric reflection point. The experiment rests for 20 ms to allow time for these calculations

Mars-woltriter (4) I73
and ollw opcralions. ~\lleasuremcnls at all 5B discrete frquenciea, or a subset thereof, are made during ‘;a cycle”; thus, the cycle time is the time resolution of the observations; the maximum value of the cycle time is ‘J’,.=(‘l’~+0.02)~56, which equals 16.24 s in Timing Mode I, and 61.6 s in Timing Mode II.
The main components of the radar are the radar controller, the processor, the receiver, the transmitter, and the antenna, shown iu the block diagram in Figure 4.
13.2 Antenna
‘I’he same antenna is used for transmission and reception. The antenna is a dipole with a tip-to-tip length
of 40 m. I1 can be deployed on command when the orbit around Mars has been reached. It is made up of
two 20 m masts, which are placed independently on the spacecraft body. The antenna’s radiation pattern is
such that observations are optimum in a range of f30” around a plane perpendicular to the direction of the
dipole c1crnent.s. Thus, the location of the masts on the spacecraft taken together with the orbit are crucial
lor t.hc possibility 01’ making fadar measurements. Ideally, the two masts should be parallel and 180” apart,
hut owing lo the necessity of keeping the antenna elements out of the fidd of view of other experiments, that
may not be possible. The spacecraft will be three axis stabilized, with the x-axis pointing towards the Sun,
and the z-axis southward out of the ecliptic plane. At the present planning one mast will be parallel to the
e-axis and one will lie in the yz-plane 45” from the z-axis. With this configuration and for the present orbit,
I.he possibilitirs for plasma and ground measurqFents are acceptable (see Figure 5) without being in the field
of view of the (most sensitive experiment) wide angle TV camera (= WATV) when it is in position to make
measurements.
Owing to the large lrequeucy range of the system, the antenna is connected to an impedance matching circuit
to optimize the antenna system. The antenna is switched between the transmitter and receiver, which has the advantage of minimizing overloading of the receiver.
:j.3 The Radar Controller
/\t the slart of operations the radar controller initiates self-tests of hardware and software and receives the
“control code words” from the spacecraft via the interface. The code words define the experiment to be carried out, i.e. the processor activity, control parameters (operation mode), and burst time (timing mode). The controller Ihcn proceeds to supervise the timing of all the radar operations.
TABLE 2
Timing modes and operation modes of the LWK experiment
‘rimiitig Mu&s: I I I Tf
= scow lime = TX..+TX,j,
= burst time, s 11 = number of scans in burst = Tbxl’RF
ITI = number of Rx samples iu burst
T, = cycle lime 5 56 x (Tb+O.O2)
For 1’111: = 333.333:
1: Tb = 0.27 s
n = 90 m = 2048
T, I: 16.24 s
II: T,, = 1.08 s
II = 360
,Fc = I024
5 61.6 s
Operating Modes:
A: Constant frequency (ground sounding);
The discrete frequency, f,, is constant in every scan in a burst; “i” increases from 1 to 56 from burst to burst.
B: Frequency modulation (plasma sounding);
For each burst the discrete frequency, fit is modulated linearly over 15 kHz during the duration of the burst. From burst to burst the index “i” can increase in steps of one
or larger.

(4)174 E. Nielsen ef al.
LWRSYSTEM :
4 TX/RX Switch I-,
Fig. 4. Block diagram of Long Wavelength Radar.
The controller includes the frequency synthesizer, which generates the discrete frequencies, controls the modu-
lation of the transmitted signal, and retunes the receiver with varying frequency; it also activates the TX/RX
switch; it starts the analog-to-digital conversion in the receiver making data available for the processor; it
activates the spectral calculations in the processor when all data are in. Eventually, the processor results are
send to the spacecraft memory to be transmitted to Earth. The controller can command the receiver output
to bypass the processor and go directly to the spacecraft memory via the interface. The radar controller
also sets the impedance matching for varying frequencies and oversees the calibrations of the receiver gain,
necessary to ensure good measurements of the reflection coefficient.
Fig. 5. During the mission plasma - and ground measurements can be carried out in the cross-
hatched regions in panel “a” and “b”, respectively. The “dotted” regions indicate intervals when
the WATV is in position to make observations. In panels “2’ and “d”, the cross-hatched regions
are intervals during which one or the other LWR antenna is in the fiel-of-view of the WATV ex-
periment; clearly this does not happen when the experiment is in a position to make observations.
Time is in days after spacecraft injection into orbit around Mars; the “true anomaly” is the angle measured from the perigee to Mars and to the spacecraft location in the orbit. (Courtesy V. liheifels)

Mars-worbita (4Jl75
I‘he transrniLLrr is a wide band amplifier, which transmits at a frequency determined by the controller, and
given by L.he frequency synthesizer. The AGC is activated at the end of each burst, and the setting is saved
with Lhe data. The dynamic range of the radar signal on the receiver input is 65 dB. The receiver dead time
is not less than 200 16s. The receiver output is digitized before entering the processor. In case of a emergency
it is also possible to pass the digitized receiver output directly to the spacecraft interface.
3.5 Processor
In operation Mode A (which will be used for ground sounding) the processor determines the mean value of
Lhe received samples in each burst (for each discrete frequency). In operation Mode B (which will be used for
plasma souncling) the processor makes a I&I, Fourier Transform of the data samples obtained in each burst
and selects for each burst the frequency at which the power peaks. The processor output are the spectrum
values in the hundred frequency points surrounding the peak frequency. The processor output is loaded in a
memory, which on command can be “copied” to the spacecraft memory via the interface.
Using the data obLaincd in the firs1 cycle the processor selects the optimum PRF. Alternatively, the processor
will calculate t.hc optimum PRF using orbit information and expected target locations.
The basic parameters of Lhe radar are surhmarized in Table 3.
TAHLE 3
LWR experiment parameters
Frequency range
I’rilse repetition frequency
Reccivcr bandwidlh
Number of discrete frcquenciea
Operating modes:
Mode A: constant frequency during burst
Mode 8: linear frequency modulation in burst,
frequency range
‘rime of measurements at each discrete frequency,
burst Lime (TO: Mode I
Mode II
Number of data samples in burst:
Mode I Mode II
Dipole antenna length
Peak voltage at antenna input
Power
Total mass 5
Maximum Larget range for SNR 2 13 dB:
0.17 - 4.93
156 - 624
4000
56
15
270 1080
2048
1024
2 x 20
1.0
100
30
Frequency (kHz] Timing Mode I: Timing Mode II:
Di [km]: D, [km]: Di [km] D. [km]:
180 2900
250 3600
500 5800
750 8800
1090 9800
1250 7500
1500 8300
2000 10000
2500 10000
3000 10000 3500 10000
4000 10000
4500 10000
5000 10000
2100
3100
3900
3000
3250
4800
6300
5300
10000
10000
6500
4500
4500
5700
8700
10000
10000
10000
10000
10000
10000
10000
10000
10000
10000
10000
3100
4800
5700
4600
4950
5800
9000
7200
12000
12000
9400
6700
D;=ionospheric distance; D,=surface distance.

(4)176 E. Nielsen cl al.
4. SUMMARY
We have described a next important step in the exploration of Mars in the form of a Long Wavelength Radar
being iucluded as part of the instrumentation on the Mars-94 mission. This radar system can be used to
provide new and better data on the upper atmosphere of Mars, and to novel and so far untried observations
of the Martian surface and subsurface. Such a radar system has not been used before and represents a new
innovative step ill planetary exploration.
ACKNOWLEDGEMENTS
The LWR experiments is designed and constructed jointly by the Institute of Radiotechnique and Electronics,
the Institute of Geochemistry and Analytical Chemistry, the Space Research Institute, Moscow, Rostov State
IJniversity, Rostov, and the Max Planck Institute for Aeronomie, Katlenburg-Lindau (Germany), together
with Babakin Center, Moscpw, and von Hoerner & Sulger, Schwetzingen (Germany).
REFERENCES
W.I. :\xl’o~,tl. ‘1’11~ Iutoraction of the solar wih with Mars, COSPAR invited review, Madrid, (1972)
W.I. Axford, A (:ommcntary on our present understanding of the Martian magnetosphere, PInnet. Space Sci. :N, 167 (1991)
S.J. Bauer and M.11. Hantsch, Solar cycle variation of the upper atposphere of Mars, Geophys. Res. Mt. 16,
:173 ( I98!1)
L.11. 13race, R.F. Theis, W.R. Hoegy, J.H. Woife, J.D. Mihalov, C.T. Russell, R.C. Elphic, and A.F. Nagy,
The Dynamic behavior of the Venus ionosphere in response to solar wind interactions, J. Geophys. Res. 85,
7663 (1980)
l’.K. Breus. The solar wind interaction with Mars over the solar cycle: A post-Phobos view, iu: Geophysical Monograph (if?, ACIJ (1992)
M.J. Canlbell and .I. Ulrichs, Electrical properties of rocks and their significance for lunar radar observations,
J. C’cophys. !2cs. 74, 5867 (1969)
.J.W. Chamberlain and D.M. lIunten, Theory of planetary atmospheres, Academic Press (London) Inc. (1987)
R.N. Chen, T.E. Cravens, and A.F. Nagy, The Martian ionosphere in light of the Viking observations, J.
Ceophys. Res. 83, 3871 (1978)
‘I‘.E. Cravens and II. Shinagawa, The Ionopausc current layer at Venus, J. Ceophys. Res. 96, II 119 (1991)
ShSh. Dolginov, On the magnetic field of Mars: Mars 2 and 3 evidence, Geophys. Res. Lelt. 5, 89 (1978)
C.S. Downs, P.E. Reichly, and R.R. Green, Radar measurements of Martian topography and surface proper-
ties: the 1971 and 1973 oppositions, Icarus 26, 273 (1975)
D.D. I<vans. Mathetical models for the reflection coefficients of dielectric half-spaces, Radio Sciences 8, 1083
(1973)
F.I’. Fanale. .J.It. Salvail, A.P. Zent and S.E. Poatawko, Global distribution and migration of subsurface ice
on IMars, lcurus 137, 1 (1986)
C.B. Farmer and P.E. Dams, Global seasonal variation of water vapor on Mars and the implications for
permafrost, J. Ceophys. Res. 84, 2881 (1979)
M.1. Finkelshtcin. V.L. Mendelson and B.A. Kutev, The Earth sub-surface radar investigation, Sow Radio, p.174 (1977)
A.A. Galeev, Plasma boundaries and structures in cometary coma, “Itogi nauki i techniki”, VINITI, Plasma
processes in Space 2, 119 (1989)
:\. C;rak, lntcnsity and position of the Martian magnetic dipole, calculated from the observations of the
satellilc I’hobo~ 2, /-‘/an. Space Sci. 40, 719 (1992)
1i.l. Gringtiuz. V.V. riezrukikh, G.I. Volkov, T.K. Breus, L.S. Musatov, L.P. Havkin and G. Sloutchenkov,
Ilcsultu 01‘ solar plaslna electron observalions on Mars 2 and Mars 3, .I. Ceophys. Res. 78, 5808 (1973)
li.1. Cringauz, ‘I’.l. Gombosi, M. Tatrallyay, M.I. Verigin, A.P. Remizov and A.F. Nagy, Detection of new
..c:hernical” boundary of Comet Halley, Geo&s. fles. Lelt. 13, 613 (1986)
.r. IIagfors. Remote probing of the Moon by infrared and microwave emissions and by radar, Radio sci. 5,
I89 (19703

Mars-94 orbiter (4)177
W.B. 11~~0~ and G.1’. Manta, Viking electron temperature measurements: evidence for a magnetic field in
the Martian ionosphere, J. Geophys. Res. 93, 7538 (1988)
W.U. I-ICUISW,, S, Sauatani and D.R. Zuccaro, The Martian ionosphere as observed by the Viking retarding
potmliid ;rnidpzr5. J. Ccophys. Ilcs. 52, 4351 (1977)
%,I.li. IIiirlLsrh aud S.J. 13aucr, Solar control of the Mars ionosphere, Plan& Space Sci. 38, 539 (l!@o)
.I.I<. IIUIW~I alld S.J. Oslro, Mars: Dual-polarization radar observations with extended coverage, /cants 62,
I10 (lYS5)
.J.K. l1art11011. D.13. Campbell and S.J. Ostro, Dual-polarization radar observations of Mars: Tharsis and
PIIvirons, /cnr.u.s 52. 171 (1982)
I,‘.S. JO~IIISOII and W.B. Hanson, A New concept for the daytime magnetosphere of Venus, Geophys. lies.
Lelt. 6, 561 (1979)
H.S. Kieffer, S.C. Chase, Jr., E. Miner, G. Munch and G. Neugebauer, Preliminary report on infrared radio-
metric measurements tram the Mariner 9 spacecraft, J. Geophys. Res. 78, 4291 (1973)
r\.J. Kliore, Radio occultatiqn observations of the ionospheres of Mars and Venus, in Geophysical Monograph 6G, AC\!. 265 (1992)
,\.J. Kliore, G. Fjeldbo, B.L. Seidel, M.J. Sykes and P.M. Woiceshyn, S Band radio occultation measure-
nlents of the atmosphere and topography of Mars with Mariner 9: Extended mission coverage of polar and
iutermediate latitudes, J. Geophys. Res. 78, 4331 (1973)
N.N. Krupenio. Radioinvestigation of the Mooh and Earth-group planets, in Review of recent results in science md lechnology. Series Astronomy AN SSSR, v. 18 (1980) (in Russian)
A.M. Krymskii, An interpretation of the large scale ionospheric magnetic fields and the altitude distribution
of Ihe ionospheric plasma on the dayside of Venus and Mars, in Geophysical Monograph 66, AGU, 289 (1992)
A.M. Krymskii and T.K. Breus, Magnetic fields in the Venus ionosphere general features, J. Geophys. Res. 93, 845Y (1988)
R.0. liuzmirt. \Iarlian cryolithosphere, publ. H.Nauka (1983)
C.F. I,iudal. fI.B. I-Iotz, D.N. Sweetnam, Z. Shiponny, J.P. Brenkle, G.V. Hartsell, R.T. Spear and W.H. Michael,
Viking radio occultation measurements of the atmosphere and topography of Mars: Data acuired during 1
Martian year of tracking, J. Ceophys. Res. 84, 8443 (1979)
J.G. Luhmann and L.H. Brace, Near-Mars space, Rev. Geophys. 29, 121 (1991)
l-1. Masursky. ,\II overview of geological results from Mariner 9, J. Geophys. Res. 78, 4009 (1973)
J.F. McCauley, M.11. Carr, J.A. Cults, W.K. Hartmann, H. Masursky, D.J. Milton, R.P. Sharp and D.E. Wil-
helms, Preliminary Mariner 9 report on the geology of hfars, Icarus 17, 289 (1972)
D.J. Milton, Water and process of degradation in the Martian landscape, J. Geophys. Res. 78, 4037 (1973)
1’. McKay and C.R. Stoker, The Early environment and its evolution on Mars: implications for life, Rev. Ceophys. 27, 189 (1989)
l’.T. McCormick and R.C. Whitten, On the effect of departure from spherical symmetry upon the bistatic
occultation experiment, t-‘/an. Space Sci. 20, 822 (1972)
G.R. Olhoeft. and D.W. Strangeway, Dielectric properties of the first 100 meters of the moon, Earth and I’[anelaq Scrence Lelfers 24, 394 (1975)
II. I’UIII~IT. ‘l‘hc Physics of ice, MIR, l’ubl.fl.. p.189 (1969)
C:. I’ctl.cll(r;ill. (.‘. Counselman, L.O. I~airlville and 1.1. Shapiro, Radar measurement of Martian topography, zlslrorr. ./. 7.I:llil (1969)
.J.L. Phillips, J.G. Luhmann and C.T. Russell, Growth and maintenance of large-scale magnetic fields in the
daysidc Venus ionosphere, J. Ceophys. Res. 89, 15676 (1984)
J.L. f’hillips, .I.(:. Lullmann, W.C. Knudsen and L.H. Brace, Asymmetries in the location of t.he Venus
ionopause, J. C’cophys. Rcs. 93, 3927 (1988)
.J. I’irraglia and S.H. Gross, Latitude and longitude variations of a planetary atmosphere and occultation experiment, I%m. Space Sci. 18, 1769 (1970)
R.P. Rohbaugh, J.S. Nisbet, E. Bleuler and J.R. Herman, The effect of energetically produced 0: on the ion
temperatures of the Martian thermosphere, J. Ceophys. Res. 84, 3327 (1979)
l1.J. Rudy, 11.0. Muhlernau, G.L. Berge, B.M. Jakosky and P.R. Christensen, Mars: VLA observations of the
northern hemisphere and the north polar region at wavelengths of 2 and 6 cm, Icarus 71, 159 (1987)
C.T. l~usscll, R.C. Elphic and J.A. Slavin, Iuitial Pioneer Venus magnetic field results: dayside observatious, Science 203, 745 (lY79)
1t.W. Schurtk and A.1:. Nagy, lonosphcrcs of terrestrial planets, Ileu. Ceophys. Space Phys. 18, 813 (1980)

(41178 E. Nielsen et al.
Il. Shinagnwa and ‘I’. I:. Cravens, I\ one-dimensional multispecies magnetohydromagnetic model of the dayside
Ionospllcre ol’ Venus, ./. Ceophys. IZes. 93, 11263 (1988)
II. Shirlagawa and T.E. Cravens, A one-dimensional multispeci magnetohydrodynamical model of the dayeide
iorlospherc of Mars, J. Ceophys. Res. 94, 6506 (1989)
II. Shinagawa and T.E. Cravens, The Ionospheric effects of a weak intrinsic magnetic field at Mars, J. Geophys.
Iles. 97, 1027 (1992)
.J.A. S~.I.VIII d11d lt.13. llolzcr, ‘I’hc Solar wind interaction with Mars revisited, J. Geophys. RCS. 87, 10285
(1982)
D. Shtern, Long Wave Radar Complex, The Institute of Radiotechnique and Electronics, Russian Academy
of Science (1989)
S.W. Squyres. Urcy price lecture: Water on Mars, Icarus 79, 229 (1989)
.J.M. Stratton. Electromagnetic theory, McGraw-Hill Book Compagny, Inc., (1941)
3I.H.G. Zhang, S.J. Baucr and J.G. Luhmann, Ionogram analysis for a Mars topside sounder, report of Space
Research Institute of the Autirian Academy of Sciences, University of Graz, May 1990.
‘r.1,. Zhang, .I.G. Luhmann, and C.T. Russell, The magnetic barrier at Venus, j. Ceophys. Res. 96, 11145
(1991)
M.Il.G. Zhang, au d J.G. Lubmann, Comparisons of peak ionospheric pressures at Mars and Venus with
incidcnl solar wind dynamic pressure, J. Geoeys. IEes. 97, 1017 (1992)










![Radar Observations at 3.5 and 12.6cm Wavelength of Asteroid …goldstein... · 2018-04-03 · ]CARUS 28, 1--15 (1976) Radar Observations at 3.5 and 12.6cm Wavelength of Asteroid 433](https://img.dokumen.tips/doc/110x75/5e7a64e3fc701777705736bd/radar-observations-at-35-and-126cm-wavelength-of-asteroid-goldstein-2018-04-03.jpg)