Embed Size (px)
Citation preview

The least channel capacity for chaos synchronizationMogei Wang, Xingyuan Wang, Zhenzhen Liu, and Huaguang Zhang Citation: Chaos 21, 013107 (2011); doi: 10.1063/1.3556694 View online: http://dx.doi.org/10.1063/1.3556694 View Table of Contents: http://chaos.aip.org/resource/1/CHAOEH/v21/i1 Published by the American Institute of Physics. Related ArticlesMoments of the transmission eigenvalues, proper delay times and random matrix theory II J. Math. Phys. 53, 053504 (2012) On the completely integrable case of the Rössler system J. Math. Phys. 53, 052701 (2012) Generalized complexity measures and chaotic maps Chaos 22, 023118 (2012) On finite-size Lyapunov exponents in multiscale systems Chaos 22, 023115 (2012) Exact folded-band chaotic oscillator Chaos 22, 023113 (2012) Additional information on ChaosJournal Homepage: http://chaos.aip.org/ Journal Information: http://chaos.aip.org/about/about_the_journal Top downloads: http://chaos.aip.org/features/most_downloaded Information for Authors: http://chaos.aip.org/authors
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions

The least channel capacity for chaos synchronization
Mogei Wang,1,a) Xingyuan Wang,1,b) Zhenzhen Liu,1 and Huaguang Zhang2
1School of Electronic and Information Engineering, Dalian University of Technology, Dalian 116024, China2School of Information Science and Engineering, Northeastern University, Shenyang 110004, China
(Received 6 July 2010; accepted 27 January 2011; published online 17 March 2011)
Recently researchers have found that a channel with capacity exceeding the Kolmogorov–Sinai
entropy of the drive system (hKS) is theoretically necessary and sufficient to sustain the
unidirectional synchronization to arbitrarily high precision. In this study, we use symbolic
dynamics and the automaton reset sequence to distinguish the information that is required in
identifying the current drive word and obtaining the synchronization. Then, we show that the least
channel capacity that is sufficient to transmit the distinguished information and attain the
synchronization of arbitrarily high precision is hKS. Numerical simulations provide support for our
conclusions. VC 2011 American Institute of Physics. [doi:10.1063/1.3556694]
In 2005, members of OCCULT (Optical Chaos Commu-
nications using Laser-Diodes Transmitters, a European
research project), reported a high-speed long-distance
chaos-based secure communication over a commercial
fiber-optic channel. This eliminates the long-standing
doubts about the feasibility of chaos communication to
some extent. However, some underlying issues of chaos
communication are not yet resolved, e.g., what is the least
channel capacity that is sufficient for implementing chaos
communication? Since chaos communication is usually
based on the unidirectional chaos synchronization, here
we focus on the least channel capacity that is sufficient
for attaining the chaos synchronization. Previously,
researchers have found that a channel with capacity
exceeding the Kolmogorov–Sinai entropy of the drive sys-
tem hKS is sufficient to sustain the unidirectional synchro-
nization to arbitrarily high precision. In this study, we
use symbolic dynamics and the automaton reset sequence
to show that such a channel is also sufficient to synchron-
ize the unidirectionally coupled chaotic systems. On the
other hand, to sustain or attain the synchronization of
arbitrarily high precision, all the information that is gen-
erated by the drive system must be transmitted to the
response side. To sum up, hKS is the least channel
capacity that is possible to synchronize the unidirection-
ally coupled chaotic systems to arbitrarily high precision.
I. INTRODUCTION
In this paper, we analyze discrete-time chaotic systems,
that is, dynamical systems which are very sensitive to their
initial conditions. Chaotic systems are similar to stochastic
systems in the way that both of them steadily generate infor-
mation.1 Still two or more chaotic systems can exhibit syn-
chronization2,3 when they are suitably coupled and
controlled. Till now, plenty of control techniques have been
devised for chaos synchronization.3 Since controls are gener-
ally based on information, the underlying issue about chaos
synchronization is essentially the communication of infor-
mation.4–6
For a unidirectional synchronization, the information
flows from the drive system to the response system. Sym-
bolic dynamics4,6–8 is an efficient way to investigate the flow
of information between dynamical systems. When using
symbolic dynamics to analyze a chaotic system, one care-
fully divides its state space into small cells (regions), labels
each cell with a symbol, and records the visit of evolving
states in cells with a list of symbols (infinite word). In this
way, the drive and response states are corresponded to the
drive and response infinite words, respectively. When infinite
words and dynamical states are one-to-one correspondence,
the symbolic dynamics is equivalent to its underlying dy-
namics. This result is achieved for the so-called generating
partition. In this study, the drive and response sides are said
to be synchronized to some precision if the drive and
response generating infinite words have the common prefixes
(subsequences). And the finite precision synchronization is
sustained when the identity of the two prefixes is maintained.
When the capacity of the coupling channel is finite, only
finite information flows and only a finite precision synchroni-
zation is attainable within the finite time.6 For such a reason,
we discuss only the finite precision synchronization in this
work. For convenience, we extract the two prefixes from the
drive and response generating infinite words, and name them
as the drive and response words, respectively.
In this way, the drive (response) state is described by the
drive (response) word with some precision. Correspondingly,
the evolvement of the drive (response) system is interpreted
as a sequence of transitions between the drive (response)
words. Recent studies have shown that the synchronization
can be sustained to arbitrarily high precision by sending just
the sequence of transitions to the response side.4,5 It can be
seen that the source entropy of the sequence of transitions
equals the Kolmogorov–Sinai entropy of the drive system
hKS. Consequently, the channel with capacity exceeding hKS
is sufficient to transmit the sequence of transitions and sus-
tain the synchronization. On the other hand, to sustain or
a)Electronic mail: [email protected])Electronic mail: [email protected].
1054-1500/2011/21(1)/013107/8/$30.00 VC 2011 American Institute of Physics21, 013107-1
CHAOS 21, 013107 (2011)
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions

attain the synchronization of arbitrarily high precision, all
the information that is generated by the drive system must be
transmitted to the response side. According to Shannon’s in-
formation theory,9 the required channel capacity cannot be
less than the Kolmogorov–Sinai entropy hKS of the drive sys-
tem. To sum up, the channel with capacity exceeding hKS is
necessary and sufficient to sustain the unidirectional
synchronization to arbitrarily high precision.4,5
The coupling of the drive and response systems for inves-
tigating the synchronization is shown in Fig. 1, where the time
delay and signal distortion are not considered. At each itera-
tion, the detector detects the transition which is from the pre-
vious drive word to the current one, labels it with a letter
(transition letter), and transmits this letter to the controller
through the coupling channel with capacity exceeding hKS.
For simplicity of design and implementation, the detector is
assumed to use the least possible letters to label transitions.
After receiving the transition letter, the controller will com-
pute the current drive word, and apply a perturbation to the
response system to make the current response word equal to
the current drive word, that is, to sustain the synchronization.
If each transition is transmitted in this way, the synchroniza-
tion can be sustained continuously. The sequence of transition
letters is called a transition sequence hereafter.
Although the problem of attaining chaos synchroniza-
tion has been discussed in some previous studies,4,10 it has
not been resolved yet. In this study, we find that an arbitra-
rily high precision synchronization is also attainable through
the channel with capacity no less than hKS. To synchronize
the drive and response systems, the controller must unambig-
uously identify the current drive word to the synchronization
precision. Here we relate this identification to the automaton
concept of reset sequence11–13 which was formalized in 1964
by �Cerny and has found an increasingly wide utilization in
many fields. In the theory of automata, the reset sequence is
a transition sequence that specifies an automaton state by
sending any state to it. Unlike the automaton, some sequen-
ces of transitions will not occur in the symbolic dynamics.
Thus, we have the concept of the reset sequence generalized
to the symbolic dynamics. Then, we show that the controller
cannot identify the current drive word until it receives a gen-
eralized reset sequence from the detector.
We present an example using an iterated map to show
that generalized reset sequences do not always exist when
transitions are labeled with the least possible letters. There-
fore, transition sequences cannot provide sufficient informa-
tion to identify the current drive word and synchronize the
two systems. Then, we propose a scheme of labeling transi-
tions with more letters. In this case, generalized reset sequen-
ces can always exist, and enough information is contained in
transition sequences to resolve the uncertainty in the current
drive word. Therefore, sending transition sequences is suffi-
cient to attain the synchronization of arbitrarily high preci-
sion, and the required channel capacity for sending these
sequences equals their source entropy hKS. Since the channel
capacity for obtaining the synchronization cannot be less
than hKS either, the least channel capacity that is sufficient to
attain the synchronization is hKS.
II. SYMBOLIC DYNAMICS
In this paper, we study the discrete-time system
xnþ1 ¼ f ðxnÞ; xn 2 X � RN ; n 2 Zþ ¼ f0; 1; 2;…g; (1)
which exhibits chaotic motion. For the continuous-time sys-
tems, we merely assume that they have been discretized in
some way, e.g., by using the Poincare section. Another sys-
tem is driven by the system (1) unidirectionally
ynþ1 ¼ f ðynÞ þ pðXSnþ1; ynÞ; yn 2 X: (2)
The systems (1) and (2) are named as the drive and response
systems, respectively. In the system (2), the coupling
pðXSnþ1; ynÞ describes the driving effects applied by the con-
troller, where the word XSnþ1 (defined below) describes the
state xnþ1 with some precision. To synchronize the systems
(1) and (2) at time nþ 1, the information contained in xnþ1
should have been transmitted to the response side, and there-
fore the controller can apply perturbations referring to XSnþ1.
Symbolic dynamics4,6–8 investigates chaotic dynamics
with finite precision by transforming system states into sym-
bolic sequences. To achieve this transformation, a finite par-tition b is engaged to discretize the state space X into a set
of m disjoint regions, that is,
b ¼(
Cij[
i¼0;1;…;m�1
Ci ¼ X; Ci \ Cj ¼ ;;
0 � i; j � m� 1; i 6¼ j
)
The region Ck is labeled with the symbol
k; k 2 M ¼ f0; 1; 2;…;m� 1g. Then, states in X can be
coded into itinerary sequences in the symbolic space. Con-
cretely, the state x0 is corresponded to the infinite wordX10 ¼ lbðx0Þ ¼ X0X1X2…, where the symbol Xi 2 Mimplies that xi lies in the region CXi
.
Infinite words that cannot be generated with evolvements
of system (1) are called forbidden words, else admissible
words. The space of all the admissible infinite words is
denoted by W. Only one admissible word is assigned to a state
in this process, since system (1) is deterministic. If different
admissible words are assigned to different states at the same
time (except possibly for a subset of X of measure zero), then
b is generating. When b is generating, lb : X! W is one-to-
one, and W is topological equivalent to X. The generating par-
tition is easy to build for one-dimensional mappings but much
FIG. 1. (Color online) The coupling configuration of the drive and response
systems, where the detector and controller are of finite precision and the
channel is of finite capacity.
013107-2 Wang et al. Chaos 21, 013107 (2011)
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions

harder for high dimensions.8 Fortunately, efficient numerical
algorithms have been developed for computing the generating
partition in the general case.14,15 Unless otherwise stated we
always use generating partitions to discretize the space X in
the following discussion.
The finite symbolic sequence XS0 ¼ X0X1X2…XS�1,
which is a prefix of X10 , is called a (finite) word of length S.
An admissible finite word XS0 corresponds to a state set
CXS0� X. That is, if and only if x0 is in CXS
0, the first S sym-
bol of lbðx0Þ is XS0. The set that consisted of all the sets CXS
0
is called the refinement of b at stage S (Refs. 4 and 8) and is
denoted by bS hereafter. The diameter of bS, that is, the max-
imum diameter of all the state sets in bS, decreases with the
increase of S. When b is generating and S is large enough,
the diameter diam (bS) can be small enough. Thus, a gener-
ating finite word with the long enough length, e.g., XS0,
describes its corresponding state, e.g., x0, with small enough
error. We also use bS to denote the description precision
hereafter, since bS defines the description error diam (bS).
The finite set consisting of all the admissible words with the
given precision bS is denoted by Q hereafter.
When states are coarse-grained to words, evolvements
of states are converted into transitions between words.
For example, there should be a transition from XS0 to
XS1 ¼ X1X2X3…XS, since f(x0) ¼ x1. As the underlying sys-
tem (1) is chaotic, the current word, e.g., XS1, cannot be pre-
dicted based on its preceding words, e.g., XS0. That is, some
new information is generated by system (1) at time 1. Since
the transition XS0 ! XS
1 clears the uncertainty of XS1, it con-
tains all the new generated information. By contrasting XS0
and XS1, we can also see that a new symbol XS, which is the
right symbol of the ending word XS1, is brought by the transi-
tion XS0 ! XS
1. That is, the whole word XSþ10 ¼ X0X1X2…XS
is known at time 1, while only XS0 is known at time 0. As a
result, the average information contained in the transition
XS0 ! XS
1 can be quantified by the conditional entropy:
hbS ¼ Hb
Sþ1 � HbS ; where the word entropy Hb
S quantifies the
average information brought by words of length S.
The definition of word entropy is given by
HbS ¼ �
XXS
0
PðXS0Þ logðPðXS
0ÞÞ;
where PðXS0Þ is the probability of the appearance of XS
0, the
logarithm is to the base 2, and correspondingly the unit of in-
formation is bit. The information generating rate, namely,
the Kolmogorov–Sinai entropy, of system (1) is
hKS ¼ limS!1
hbS ¼ lim
S!1
1
SHb
S :
The information contained in the l transitions XS0 ! XS
1 !XS
2 ! � � � ! XSl is
hbS;l ¼
Xi¼S;Sþ1;…;Sþl�1
hbi ¼ Hb
Sþl � HbS :
When l tends to infinity, the average information contained
in each transition is
liml!1
hbS;l
l¼ lim
l!1
HbSþl � Hb
S
l¼ hKS:
Namely, the source entropy of infinite transition sequences
that are detected from system (1) is also hKS.
III. ATTAINING CHAOS SYNCHRONIZATIONTHROUGH THE LEAST CHANNEL CAPACITY
A. Maintenance of the synchronization
Throughout this study, we discuss only the finite precision
synchronization. The drive and response systems are said to
be synchronized with the precision bS, when the first (left) Ssymbols of X1n ¼ lbðxnÞ and Y1n ¼ lbðynÞ are identical, and
the finite precision synchronization is sustained if and only if
the identity between XSn and YS
n is maintained. When the syn-
chronization precision is bS, the maximum synchronization
error is diam (bS ). It has been shown in Refs. 4 and 5 that the
synchronization between systems (1) and (2) can be sustained
to arbitrarily high precision if transitions between drive words
are properly labeled by the detector and sent to the controller
through the channel with capacity exceeding hKS.
For simplicity of design and implementation, the detec-
tor is assumed to use the least possible letters a, b, c, … to
label transitions setting out from the same word. Precisely,
one symbol is generated at an iteration of system (1), so the
number of the possible next words that the given current
word can transit to is no larger than m. Thus, we have
card(P) � m, where P is the finite set of transition letters and
cardðPÞ is the number of elements in P. We use the d repre-
sentation dXS0ðq1Þ, q1 2 P to denote the word that system (1)
reaches when it sets out from the admissible word XS0 and
follows the transition q1. When following the given transi-
tion sequence q ¼ q1q2…ql, the word that system (1)
reaches is dXS0ðqÞ ¼ dXS
0ðq1q2…qlÞ ¼ d . .
.dd
XS0
ðq1Þðq2Þ
. ..
ðqlÞ.
Suppose systems (1) and (2) are synchronized to the pre-
cision bS initially, then we have XS0 ¼ YS
0 . At time 1, the detec-
tor detects the current drive word XS1, extracts the transition
XS0 ! XS
1, labels it with a letter q1, and sends this letter to the
controller through the coupling channel. When it receives the
transition letter q1, the controller will compute XS1 ¼ dYS
0ðq1Þ,
and apply a perturbation to system (2) to make YS1 ¼ XS
1,
namely, to sustain the synchronization at time 1. Similarly,
when the controller receives the letter q2 representing the tran-
sition XS1 ! XS
2, it can compute XS2 ¼ dYS
0ðq1q2Þ and apply a
perturbation accordingly to maintain the synchronization at
time 2. If the infinite transition sequence q1q2q3… can be sent
to the controller with the average speed of a letter per iteration,
then the controller can sustain the synchronization ceaselessly.
As only XSn and YS
n are handled in the process, the required
detector and controller precision is bS. It has been shown in
Sec. II that the source entropy of the infinite transition
sequence q1q2q3… is hKS. According to Shannon’s informa-
tion theory,9 such transition sequences can be transmitted with
negligible error through the channel with capacity exceeding
hKS. And therefore, the unidirectional synchronization can be
efficiently sustained with the use of the channel capacity
013107-3 Least channel capacity for chaos sync Chaos 21, 013107 (2011)
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions

exceeding hKS. A channel with capacity hKS is also necessary
to maintain the synchronization to arbitrarily high precision,
since all the information that is generated by the drive system
must be sent. To sum up, the channel capacity hKS is theoreti-
cally necessary and sufficient to efficiently sustain the unidir-
ectional chaos synchronization.4,5
B. The generalized reset sequence and the attainabilityof chaos synchronization
In this subsection, we generalize the automaton reset
sequence11–13 to the symbolic dynamics. Then, we show that
the controller cannot obtain enough information to identify
the current drive word and attain the synchronization, until it
receives a generalized reset sequence from the detector.
First, we should note that some d representations are forbid-
den in system (1). That is, some transition sequences cannot
be detected when system (1) evolves from the given initial
word. To illustrate, let us consider the map
xnþ1 ¼ f ðxnÞ ¼
43
xn þ 59; xn 2 ½0; 1
3Þ
2� 3xn; xn 2 ½13 ; 23Þ
43
xn � 89; xn 2 ½23 ; 1�
8><>: ; X ¼ ½0; 1�: (3)
One of its generating partitions is b ¼ fC0;C1;C2g, where
C0 ¼ ð0; 13Þ;C1 ¼ ð13 ; 2
3Þ and C2 ¼ ð23 ; 1Þ.
When the description precision is b1, Q ¼ f0; 1; 2g.Transitions between words and their representation letters in
P ¼ fa; b; cg are shown in Fig. 2(b), where words and transi-
tions correspond to nodes and arcs, respectively. We can see
that the d representation d0ðaab…Þ is admissible, since it
corresponds to the admissible word X10 ¼ 0102… and the
state x0 ¼ 0:030775…. However, no state in X corresponds
to the forbidden d representation d2ðaab…Þ, since d2ðaab…Þrepresents the forbidden word 2102…. As a result, the transi-
tion sequence aab… can never be detected, when system (1)
sets out from the word 2. Although admissible words and ad-
missible d representations are one-to-one correspondence,
some forbidden words correspond to no d representation.
One example for this is the forbidden word 000….
Now let us discuss the attainability of the synchronization
with the use of the transition sequences. Suppose the drive
words XSn, XS
nþ1, XSnþ2, … are identified, the controller, which
is assumed to be properly designed, can apply perturbations
accordingly to synchronize systems (1) and (2) to the precision
bS. Moreover, if XSn is identified, the controller can compute its
following words XSnþ1 ¼ dXS
nðqnþ1Þ, XS
nþ2 ¼ dXSnþ1ðqnþ2Þ,
XSnþ3 ¼ dXS
nþ2ðqnþ3Þ, …, where qi is received from the detec-
tor. Thus, the main obstacle for attaining the synchronization
is the identification of the current drive word, e.g., XSn, by using
the finite-length transition sequences, e.g., q1q2…qn. Here we
relate this identification to the automaton reset sequence.11–13
In the theory of automata, the reset sequence is an au-
tomaton transition sequence that sends the automaton from
any automaton state to one and the same state. The current
automaton state cannot be unambiguously identified by
observing the transitions between automaton states, until a
reset sequence appears to specify the predetermined state.
Here we should note that any given transition sequence is ad-
missible for all the initial states in the automaton, but many
transition sequences are admissible only for specific initial
words in symbolic dynamics. This difference urges us to
generalize the concept of the reset sequence to symbolic
dynamics.
Let Qq;Qq � Q be the set consisting of all the words
that are admissible for the finite-length transition sequence
q. We say q is a generalized reset sequence if there exist a
word qj in Q, for any word qi in Qq, dqiðqÞ ¼ qj. When tran-
sition sequences are the only reference information, general-
ized reset sequences are the only sequences that
unambiguously specify the current drive word. To show this,
we define the finite word set d�ðq0Þ ¼ fdqiðq0Þjqi 2 Qq0g,
where q0 is a finite-length transition sequence and the sub-
script “–” implies that the current word is unknown. When
the controller receives the transition sequence q0, it can only
know that the current drive word lies in the set d�ðq0Þ. The
controller cannot unambiguously identify the current drive
word unless d�ðq0Þ consists of only one word qj, and in this
case, we have dqiðq0Þ ¼ qj, 8qi 2 Qq0, namely, q0 is a gener-
alized reset sequence.
We should note that the labeling of transitions deter-
mines the existence of generalized reset sequences. To illus-
trate, let us consider the map
xnþ1 ¼ f ðxnÞ ¼2xn; xn 2 ½0; 1
3Þ
2xn � 13; xn 2 ½13 ; 2
3Þ
2xn � 43; xn 2 ½23 ; 1�
8<: ; X ¼ ½0; 1�: (4)
One of its generating partitions is b ¼ fC0;C1;C2g, where
C0 ¼ ð0; 13Þ;C1 ¼ ð13 ; 2
3Þ, and C2 ¼ ð23 ; 1Þ. When the descrip-
tion precision is b1, Q ¼ f0; 1; 2g. When P ¼ fa; bg and the
representation letters of transitions are 0!a 0, 0!b 1, 1!a 1,
1!b 2, 2!a 0, and 2!b 1, d�ðq1q2q3…qn�1aÞ ¼ f0; 1g and
d�ðq1q2q3…qn�1bÞ ¼ f1; 2g ( n � 1), i.e., no generalized
reset sequence exists. However, if the transitions are labeled
as 0!b 0, 0!a 1, 1!a 1, 1!b 2, 2!b 0, and 2!a 1, then
d�ðaÞ ¼ f1g, i.e., a is a generalized reset sequence.
FIG. 2. (Color online) In symbolic dynamics, the d representation
d0ðaab…Þ is admissible, while d2ðaab…Þ is forbidden. The reason is that
the former corresponds to the admissible word 0102… and the state
x0 ¼ 0:030775…. However, the latter corresponds to no state in X. Due to
the finite memory property of the directed graph, some forbidden d represen-
tations cannot be gotten from (b) directly.
013107-4 Wang et al. Chaos 21, 013107 (2011)
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions
C. An extreme example
In this subsection, we show that generalized reset
sequences do not always exist when transitions are labeled
with the least possible letters. To illustrate, let us consider
the chaotic map
xnþ1 ¼ f ðxnÞ ¼2xn þ 1
2;
�2xn þ 32;
2xn � 1;�2xn þ 2;
8>><>>:
xn 2 ½0; 14Þ
xn 2 ½14 ; 12Þ
xn 2 ½12 ; 34Þ
xn 2 ½34 ; 1�; X ¼ ½0; 1�:
(5)
The plot of map (5) is shown in Fig. 3. One of its generating
partitions is b ¼ fC0;C1;C2;C3g, where C0 ¼ ð0; 14Þ,
C1 ¼ ð14 ; 12Þ, C2 ¼ ð12 ; 3
4Þ, and C3 ¼ ð34 ; 1Þ. The refinement of
b at the stage S is bS ¼n�
i=2Sþ1; ðiþ 1Þ=2Sþ1�j i ¼ 0; 1;
…; 2Sþ1 � 1o
.
By analyzing map (5) we can see that all its infinite words
are of two modes, that is, ABAB... and BABA..., where A (B)
can be replaced by the symbol 0 or 1 (2 or 3). Thus, for any ad-
missible finite word, the number of the possible next words it
can transit to is no larger than two, and transitions between
words can always be labeled with two letters. Moreover, there
exists no forbidden d representation when transitions are la-
beled with two letters, and therefore the generalized reset
sequence, if it really exists, should transit all the admissible fi-
nite words to the specific word. Let IA ¼ ð0; 12Þ, IB ¼ ð12 ; 1Þ,
then we have f ðIAÞ ¼ IB and f ðIBÞ ¼ IA. By the recurrence,
we have f kðIAÞ \ f kðIBÞ ¼ ;; 8k 2N. Choosing two partition
regions IX and IY ( IX; IY 2 bS) from IA and IB, respectively,
then we have f kðIXÞ � f kðIAÞ, f kðIYÞ � f kðIBÞ, and
f kðIXÞ \ f kðIYÞ ¼ ;.That is, there exist two partition regions IX and IY ,
evolvements of which will not intersect with each other.
Since iterations correspond to transitions in the symbolic dy-
namics, the two words corresponding to regions IX and IY
cannot be sent to the same word by any finite-length transi-
tion sequence. Therefore, generalized reset sequence cannot
exist when transitions are labeled with two letters. When the
description precision is b1, all the labeling schemes in the
sense of equivalence are shown in Fig. 4. It can be verified
that the generalized reset sequence exists in no case.
D. A general labeling scheme for chaossynchronization
It has been shown previously that when transitions are la-
beled with the least possible letters, transition sequences can-
not always provide sufficient information to identify the
current drive word and to attain the synchronization. In this
subsection, we construct a general and efficient scheme to
show that the information that must be transmitted to attain
the synchronization can be tagged and identified by labeling
FIG. 3. Plot of map (5).
FIG. 4. (Color online) When the description precision is b1, all the schemes of labeling transitions with the least possible letters (in the sense of equivalence)
are given here. In no case does the generalized reset sequence exist.
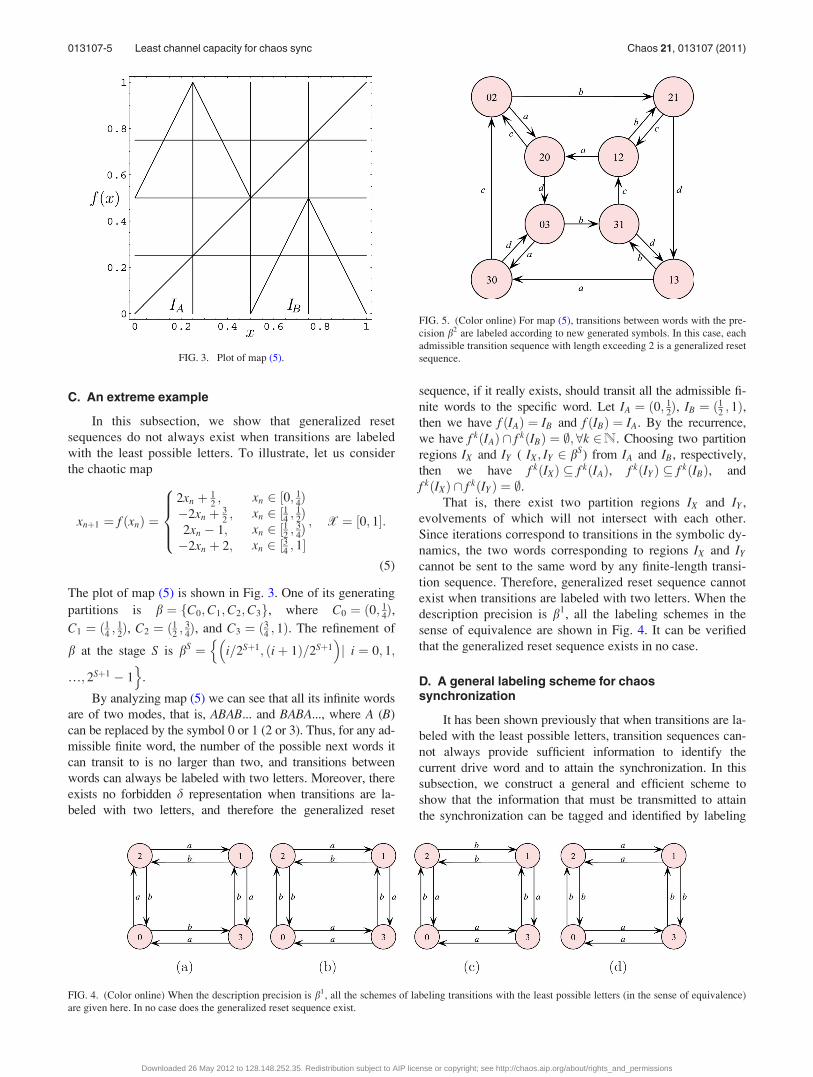
FIG. 5. (Color online) For map (5), transitions between words with the pre-
cision b2 are labeled according to new generated symbols. In this case, each
admissible transition sequence with length exceeding 2 is a generalized reset
sequence.
013107-5 Least channel capacity for chaos sync Chaos 21, 013107 (2011)
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions

transitions with m letters. Here we label transitions according
to the new generated symbols they brought. More specifically,
when the new generated symbol is 0 (1, 2, … ), the transition
which brings it is labeled with the letter a (b, c, … ). For the
sake of convenience, we use r : M! P to denote the labeling
process, e.g., rð0Þ ¼ a, rð1Þ ¼ b, rð2Þ ¼ c;…. For map (5),
one example for labeling its transitions with four letters in
P0 ¼ fa; b; c; dg is shown in Fig. 5.
Since the map r is one-to-one, it has the inverse map
r�1 : P! M, r�1ðaÞ ¼ 0, r�1ðbÞ ¼ 1, r�1ðcÞ ¼ 2;…. The
existence of the map r�1 implies that the identification of
the current drive word can be context free, that is, the con-
troller can specify the current word symbol by symbol. Con-
cretely, when controller receives the transition sequence
q0 ¼ qnþ1qnþ2…qnþS with the length S, it can specifies the
current drive word r�1ðqnþ1Þr�1ðqnþ2Þ…r�1ðqnþSÞ with the
precision bS. In this way, each admissible transition
sequence with the length S is a generalized reset sequence
and specifies the current drive word to the precision bS.
Although more letters are engaged in the new scheme, the
required channel capacity is not enlarged. The reason is that
the required channel capacity is only defined by the source
entropy of the transition sequence, i.e., hKS. Therefore, a
channel with capacity exceeding hKS is sufficient to send the
generalized transition sequences, identify the current drive
word and attain the synchronization. Since the required chan-
nel capacity for attaining the synchronization is not less than
hKS, hKS is the least channel capacity that is sufficient to
attain the unidirectional chaos synchronization of arbitrarily
high precision.
To end this section, let us contrast the two labeling
schemes. When transitions are labeled with letters in
P ¼ fa; bg, no matter what the current transition letter is, the
next letter can be a or b with the same probability. Therefore,
precisely 1-bit of information is contained in one transition
letter of the transition sequence on P. When transitions are
labeled with letters in P0 ¼ fa; b; c; dg and the current transi-
tion letter is a or b (c or d), the next letter can only be c or
d (a or b) with the same probability. Therefore, when the
current transition letter is known, the information contained
in the next transition letter is 1 bit. At the same time, the first
transition letter can be a, b, c, or d with the same probability,
and therefore it contains 2-bit of information. To sum up, it
is (lþ 1)-bit of information that is contained in the transition
sequences on P0 with the length l. And this extra bit of infor-
mation helps to specify the current drive word. When the
length of the transition sequence tends to infinity, the influ-
ence of this extra bit of information on the source entropy
tends to zero. As a result, this extra bit does not enlarge the
required channel capacity hKS.
IV. SIMULATION RESULTS
Following the scheme proposed in Sec. III D, we first
simulate on the map (5). That is, when iterated autono-
mously, the f in systems (1) and (2) are both the map (5).
The synchronization precision is b6, and correspondingly
there exist 128 admissible finite words to describe states.
The Kolmogorov–Sinai entropy of the map (5) is 1, and
therefore the capacity of the coupling channel is ð1þ �Þ -bit
where � > 0 can be arbitrarily small in value. Here we use
the controller
pðXSnþ1; ynÞ ¼ KðgðX6
nþ1Þ � f ðynÞÞ; (6)
where K 2 R is the coupling coefficient and the function gis used to estimate xnþ1. As can be seen from Fig. 6, such a
controller can attain and maintain the synchronization
efficiently.
In the simulation, the estimation function gðX6nþ1Þ is
defined to the central point of the region that X6nþ1 indicates,
and K ¼ 0:8. The channel capacity is 1.01-bit (�¼ 0.01).
The drive and response sides are simulated with a section of
program code, respectively. To ensure that the two sides
refer to the common time, the two sections of code are
assembled into one computer process. At each iteration, the
FIG. 6. (Color online) Simulation on map (5). As it is shown in Sec. III D, it is 2-bit of information contained in the first letter q1 of the transition sequence q0,and 1-bit of information contained in each of the following letters q2q3…. Thus, q1 is transmitted at time 2, and q2 is transmitted at time 3. The transition let-
ters cannot be transmitted timely, until time 100 when the extra bit of information is sent. And from then on, the current drive word can be identified to the pre-
cision b6, and the synchronization can be attained and sustained.
FIG. 7. (Color online) Simulation on map (4). Similar to the previous simulation, more than 1-bit of information is contained in the first letter q1, and 1-bit of
information contained in each of the following letters. The information contained in the first 100 transition letters can only be transmitted at time 100. And
from then on, the current drive word is identified and the synchronization is attained.
013107-6 Wang et al. Chaos 21, 013107 (2011)
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions

drive code detects the word Xnþ1, labels the transition
Xn ! Xnþ1 with a letter qnþ1 according to the new generated
symbol in Xnþ1, and writes the letters into a 1-bit variable.
Then the response code reads the letters from the variable
and tries to identify the word X6nþ1. To simulate the 1.01-bit
channel capacity, this 1-bit variable can be write/read 101
times for every 100 iterations.
The drive waveform is given in Fig. 6(a), and the identi-
fication of the current drive word is shown in Fig. 6(b). Ini-
tially, the current drive word is not known at the response
side, and no perturbation is applied. After 100 iterations, the
controller receives 100 transition letters (101-bit of informa-
tion) and is able to identify the current drive word to the pre-
cision b6. Then the controller applies perturbations to attain
the synchronization. As can be seen from the Fig. 6(c), the
response waveform tends to be identical with the drive wave-
form after time 100.
Then we simulate on map (4). The first symbol of its
infinite word can be 0, 1, or 2 with the same probability. And
the symbol 0 (1; 2) can only be followed by 0 and 1 (1 and 2;
0 and 1). In this simulation, transitions between words are
labeled with 3 letters according to their ending words. And
therefore, it is log 3-bit of information contained in the first
transition letter q1, and 1-bit of information contained in each
of the following transition letters q2q3…. The Kolmogorov–
Sinai entropy of map (4) is 1. The synchronization precision is
b6, and correspondingly there exist 96 admissible finite words.
We use the 1.01-bit channel capacity and the controller (6)
which was used in the previous simulation. Thus the
(99þ log 3)-bit of information that is contained in the first
100 transition letters q1q2…q100 can be transmitted within
100 iterations. As can be seen from Fig. 7, when these letters
are transmitted, the controller can identify the current drive
word to the precision b6 and attain the synchronization.
Lastly, we simulate on the logistic map
xnþ1 ¼ f ðxnÞ ¼ 4xnð1� xnÞ; xn 2 ½0; 1�: (7)
One of its generating partitions is b ¼ fC0;C1g, where
C0 ¼ ð0; 12Þ and C1 ¼ ð12 ; 1Þ. And there are no forbidden
words in its symbolic dynamics. That is, the first symbol of
its infinite word can be 0 or 1 with the same probability, and
both 0 and 1 can be followed by the symbols 0 and 1. In the
simulation, transitions between words are labeled with two
letters according to their ending words. Each transition letter
contains exactly 1-bit of information, and the Kolmogorov–
Sinai entropy of map (7) is 1. When the synchronization pre-
cision is b6, there are 64 admissible finite words to describe
states. We use the 1-bit channel capacity and the controller
(6). Unlike maps (4) and (5), all the transition letters of map
(7) can be transmitted without latency. Thus, the first six
transition letters which are required for identifying the cur-
rent drive word can be transmitted in six iterations with neg-
ligible probability of error. As a result, the current drive
word can be identified to the precision b6 within six itera-
tions [see Fig. 8(b)]. And from then on, the synchronization
can be attained [see Figs. 8(a) and 8(c)].
V. CONCLUSION
Previously, the least possible channel capacity for sustain-
ing the unidirectional synchronization has been proved to be
hKS. However, the problem of attaining the synchronization
has not been solved. It was claimed that the scheme of syn-
chronizing the two sides by identifying the initial drive word
is not reliable.10 In this study, we propose a general scheme to
tag the information that is required for identifying the ending
words (the current drive words) and attaining the synchroniza-
tion. It is found that some extra information is required in the
achievement of the synchronization. And a channel capacity
exceeding hKS is sufficient to transmit these information and
attain the synchronization. Moreover, the channel capacity
that is required for attaining the unidirectional synchronization
cannot be less than the Kolmogorov–Sinai entropy of the drive
system hKS. So, it can be concluded that hKS is the least chan-
nel capacity that is sufficient to attain the synchronization of
arbitrarily high precision. Last, since the chaos communica-
tion16,17 is usually built on the unidirectional synchronization,
our results also contribute to the research of the required chan-
nel capacity for chaos communication.
ACKNOWLEDGMENTS
This research is supported by National Natural Science
Foundation of China (grant numbers: 60973152, 60573172),
Doctoral Program Foundation of Institution of Higher Edu-
cation of China (grant number 20070141014), and Natural
Science Foundation of Liaoning Province of China (grant
number 20082165).
1R. Shaw, Z. Naturforsch [A] 36, 80 (1981).2S. Boccaletti, J. Kurths, G. Osipov, D. L. Valladares, and C. S. Zhou,
Phys. Rep. 366, 1 (2002).3J. M. G. Miranda, Synchronization and Control of Chaos: An Introductionfor Scientists and Engineers (Imperial College Press, London, 2004).
4T. Stojanovski, L. Kocarev, and R. Harris, IEEE Trans. Circuits Syst., I:
Fundam. Theory App. 44, 1014 (1997).5S. D. Pethel, N. J. Corron, Q. R. Underwood, and K. Myneni, Phys. Rev.
Lett. 90, 254101 (2003).6X. Wang, M. Wang, and Z. Liu, Chaos 19, 023018 (2009).
FIG. 8. (Color online) Simulation on the logistic map (7). Each transition letter contains exactly 1-bit of information, and can be transmitted without latency.
Thus, the first six transition letters which are required for identifying the current drive word can be transmitted in six iterations. When the current drive word is
identified to the precision b6, the synchronization can be attained.
013107-7 Least channel capacity for chaos sync Chaos 21, 013107 (2011)
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions

7R. L. Devaney, An Introduction to Chaotic Dynamical Systems, 2nd ed.
(Westview Press, Boulder, CO, 2003).8R. Badii and A Politi, Complexity Hierarchical Structures and ScalingPhysics (Cambridge University Press, New York, 1997).
9C. E. Shannon, Bell Syst. Tech. J. 27, 379 (1948).10A. L. Fradkov and B. Andrievsky, Phys. Rev. E 73, 066209
(2006).11Z. Kohavi, Switching and Finite Automata Theory, 2nd ed. (McGraw-Hill,
New York, 1978).12D. Lee and M. Yannakakis, Proc. IEEE 84, 1090 (1996)
13M. V. Volkov, “Synchronizing automata and the �Cerny conjecture,” in
Language and Automata Theory and Applications, Lecture Notes inComputer Science, edited by C. M. Vide, F. Otto, and H. Fernau
(Springer-Verlag, Berlin, 2008), Vol. 5196.14M. B. Kennel and M. Buhl, Phys. Rev. Lett. 91, 084102 (2003).15Y. Hirata, K. Judd, and D. Kilminster, Phys. Rev. E 70, 016215 (2004).16K. M. Cuomo and A. V. Oppenheim, Phys. Rev. Lett. 71, 65 (1993).17A. Argyris, D. Syvridis, L. Larger, V. A. Lodi, P. Colet, I. Fischer, J. G.
Ojalvo, C. R. Mirasso, L. Pesquera, and K. A. Shore, Nature (London)
438, 343 (2005).
013107-8 Wang et al. Chaos 21, 013107 (2011)
Downloaded 26 May 2012 to 128.148.252.35. Redistribution subject to AIP license or copyright; see http://chaos.aip.org/about/rights_and_permissions




























