Embed Size (px)
Citation preview

b AP~IEE) MAT~EMAqF1CS
AND,
COMPUTATION ELSEVIER Applied Mathematics and Computation 96 (1998) 1-16
The Head Injury Criterion (HIC) functional John Hutchinson a, Mark J. Kaiser b,., Hamid
M. Lankarani c National Institute for Aviation Research, Wichita State University, Wichita, KS 67260, USA
b Department of Industrial and Manufacturing Engineering, Wichita State University, Wichita, KS 67260, USA
Department of Mechanical Engineering, National Institute for Aviation Research, Wichita State University, Wichita, KS 67260, USA
Abstract
The mathematical structure of the Head Injury Criterion (HIC) functional is de- scribed. Necessary conditions for the extremal solution of the HIC functional are pre- sented, along with results characterizing the critical points of the functional. A program written in Borland C is developed to construct the HIC functional, and var- ious characteristics of the HIC are determined from the constructed functional, includ- ing the average HIC value, HIC variance, and higher-order HIC moments. By investigating the form of the HIC functional, it is possible to extract structural infor- mation by the computation of the moments of the functional. Sample functional plots for experimental acceleration pulses are also provided. © 1998 Elsevier Science Inc. All rights reserved.
Keywords." Brain injury; Head impact measures; Injury tolerance
I. Introduction
Various means to quantify brain injury have been proposed, and most cri- teria a t tempt to relate measured dynamic or kinematic input or output param- eters to observed injury phenomena. One o f the most popular measures o f head injury tolerance to mechanical impact is the Head Injury Criterion (HIC). The H I C has been used for more than 20 years in N o r t h American m o t o r vehicle safety regulations as a predictor o f head injury risk in frontal impacts. The
* Corresponding author. E-mail: [email protected].
0096-3003/98/$ - see front matter © 1998 Elsevier Science Inc. All rights reserved. PII: S0096-3003(97) 10106-0

J. Hutchinson et al. / Appl. Math. Comput. 96 (1998) 1-16
HIC is calculated from the linear acceleration observed at the center of mass of the head of an Anthropomorphic Test Device (ATD) seated in a vehicle that collides with a fixed rigid barrier. In this paper the HIC functional is first re- viewed, including brief historical developments, and the application of HIC in design and as a predictor of head risk is discussed. The HIC functional is formally defined and a physical interpretation provided, and some of its limi- tations and related head injury measures are discussed. The mathematical structure of the HIC functional is then investigated, including the character of the solution points which determine the HIC functional. A numerical proce- dure to construct the HIC functional is then described and illustrated on var- ious acceleration input pulses.
1.1. Head injury classification
According to National Safety Council statistics, accidents are the fourth leading cause of death among all age groups, falling behind heart disease, can- cer, and stroke [14]. Automobile accidents are the most common type (49%), falls at home rank second (28%), and motorcycle and work-related accidents comprise the majority of the remaining part. It has been estimated that head injury occurs in 71% of persons injured in automobile accidents, 70% of per- sons injured in falls at home, 50% of persons injured in motorcycle accidents, and 7% of work-related injuries. Approximately 10 million head injuries are re- ported in the US each year, with roughly 10% of them considered moderate to severe [19].
Head injuries can be classified in three main categories: (i) skull fracture; (ii) focal brain injuries; (iii) diffuse brain injuries. Skull fracture may occur with or without brain damage and affects more than 16000 passenger vehicle occupants each year (National Accident Sampling System, 1991). Focal brain injuries in- volve visible lesions, are a serious and dangerous form of head injury, and ac- count for 50% of all patients admitted to hospitals and roughly 67% of all head injury deaths. Focal brain injuries include contusions, subdural hematoma, epi- dural hematoma, and intracerebral hematoma. Diffuse brain injuries normally involve a global disruption of neurologic function and essentially includes all other head injury types [1,8].
1.2. Historical development
Most criteria of head injury tolerance are gross approximations of a com- plex living biological system being damaged by external impact. The location, magnitude and direction of impact, duration, and input all influence the re- sponse of the brain and skull which can be greatly modified by skull fracture. The HIC originated from the work of Gurdjian and collaborators [9-1 I] and evolved over a period of about a decade with experiments measuring the effects

J. Hutchinson et al. I Applied Mathematics and Computation 96 (1998) 1-16 3
of acceleration on the intracranial pressure of dogs (the experiments are gruesome, but interesting, and essentially involved smashing the heads of ane- thesized dogs and monkeys [and later human cadavers] by hammers of different weights and measuring the concussive effects on the subjects). The energy re- quired to cause concussive effects can be measured, and Gurdjian developed the well-known "Wayne State University Cerebral Concussion Tolerance Curve" (WSTC) which was interpreted as a limit between responses of the head to impacts causing fatal and non-fatal injuries. The WSTC was an experimen- tal correlation between effective acceleration of the head and the impact time duration, and indicates the estimated threshold values of human brain injury hazard. The functional expression for HIC (see (1)), as modified by Versac [29], was derived from this curve. For a more complete historic overview of the HIC functional see [12].
1.3. Engineering applications of the head injury criterion
Generally speaking, and without recourse to the vast literature on the sub- ject, the task of aerospace and automotive designers is to:
Design seats, restraints, and interior elements of the cockpit/cabin/car to reduce the amount of passenger injury in specific types of collision situations.
The HIC functional is normally used as a metric to assess the quality of the design. For example, in automobile structures shape design parameters (say, for the dashboard, steering wheel, or seat) are normally optimized (to absorb the energy of a head impact) to achieve minimum HIC [17]. In helmet testing the situation is similar [10]. The HIC problem is encountered in numerous en- vironments including those where the occupants are facing the bulkhead, in- terior wall, side walls, lavatories, instrument panel, seat back, cabin furnishings, etc. In general, any interior structure that is impacted by the oc- cupant is susceptible to modeling. Sled testing of the ATD-seat-restraint struc- ture is one common means to test for injury criteria in the automotive and aircraft industry.
The relationship between HIC and injury is important to both the highway and airline safety community, and both industry standards require HIC eval- uation for certification [2,5,16]. The Federal Motor Vehicle Safety Standard (FMVSS) 208 (occupant crash protection) and FMVSS 213 (child restraint sys- tems) specify a maximum HIC value of 1000 under given impact conditions (featureless Hybrid III head form freely moving at a velocity of 15 mph that impacts the interior of a vehicle). The HIC is also the measure cited most often in the New Car Assessment Program. In the aircraft industry, Federal Aviation Regulations require that the HIC value be less than 1000 prior to certification.
Prasad and Mertz [24] developed a Head Injury Risk Curve (HIRC) from cadaver head impact test data. For HIC values between 0 and 3000, the

J. Hutchinson et al. / Appl. Math. Comput. 96 (1998) 1-16
percentage of persons that would be at risk of sustaining a life-threatening in- jury was calculated. According to the HIRC, a value of HIC = 1400 is associ- ated with a 50% probability of life-threatening brain injury, while the regulated value of HIC = 1000 entails a risk of about 18%. These predictions are limited to contact events for which the HIC integration time does not exceed 15 ms.
In finite element modeling of direct head impact [26], the HIC calculated from the head acceleration was found to be generally proportional to the im- pact force, coup pressure, brain maximum shear stress, and skull von Mises stress. The HIC thus appears to be a reasonable index of injury severity in a direct impact situation. Other work has also supported the ability of HIC to predict relative degrees of intracranial trauma [18].
1.4. Head injury criterion functional
In an impact environment forces and moments are difficult to measure. Load cells are generally large and inconvenient to use, and are frequently inter- posed between the body and impacting surface altering the level and character- istics of the contact force. On the other hand, acceleration of body segments are relatively easy to measure and thus form the principle instrument in impact experiments. Acceleration is the rate of change of motion of an object having mass. The rate of change of motion is expressed as meters per second, and the basic unit of acceleration, g, is derived from the force of gravity in our earth- bound environment (g = 9.81 m/s2). The normal deceleration of a vehicle im- poses forces that are essentially the same as those of actual acceleration, but in reverse [27]. Deceleration in the case of vehicle accidents can be extremely abrupt, however, and energy-absorbing objects (such as air bags, collapsible steering wheels, etc.) provide for a more gradual deceleration.
Analytic formulation." The HIC is defined by the analytic expression
max ' a, ,d l } tl,t2 L (t2 -- t1)3/2 ' (1 )
where the magnitude of the linear acceleration observed at the center of mass of the head of an ATD upon impact is described by a(t). The resultant accel- eration (measured in g) is of duration T, and tl and t2 are two time points (mea- sured in seconds) during the impact, 0 ~< tl < t2 ~< T. The value of t~ and t~ which maximize expression (1), written equivalently
(t2 - tl (t2 - tl) a(t) dt ,
is known as the HIC interval (t~', t~). The values oft~ and t~ which maximize (1) are not necessarily unique. Federal regulations require that HIC < 1000, and

J. Hutchinson et aLI Applied Mathematics and Computation 96 (1998) 1 16 5
in automotive crash testing, the head acceleration pulse have durations gener- ally ranging from 50-200 ms and are normally digitized at sampling rates of 625-12.5 kHz.
Physical interpretation: A physical interpretation of HIC was provided in [6]. Define the duration of the HIC interval (tT, t~) by r, r = t~ - t~, and the integral of the resultant acceleration by V,
f t~ -a V = (t) dt.
aq
The functional expression for the HIC then becomes
HIC = - - , (2) r
which can be interpreted as the rate of change of kinetic energy (V2/'t ") modu- lated by the square root of the average acceleration (V/r) over the integration interval. If the power in the HIC functional was changed to 2, then the function would represent the peak average power delivered to the head. This can be in- terpreted as indicating that the head can undergo a certain maximum rate of change of energy, and if exceeded, injury will result [28].
Algorithmic considerations: There are various means to compute the value of HIC, and generally speaking, time requirements are on the order of a few sec- onds regardless of the method used. Algorithms which employ a direct method of computation involve all possible interval combinations and yield the exact value of HIC. The computation times, which were once excessive using this ap- proach, are now comparable to more efficient procedures owing to the ad- vances in computational power over the last two decades. Various other algorithms employing results characterizing optimal solutions (for instance, see Theorem 2.1) provide a more efficient means of calculating HIC and form the basis of most algorithmic strategies. These strategies are referred to as the maximization requirement criteria and partitioning technique, and will not be discussed. For further details see [4,21,25].
Limitations and related head injury measures: The HIC is non-injury-specific and does not relate directly to injury severity, nor does it take into account variations in the brain mass or load direction. The WSTC and HIC are both based on an inverse relationship between the tolerable level of head accelera- tion and its duration. The assumed time dependence of the tolerable average acceleration leads to predictions that short-duration, high acceleration events and long-duration, low acceleration events yield equal risks of closed head in- jury. This was the basis of Newman's arguments against the use of the HIC in design environments [22].
The WSTC curve is built on an acceleration time history measured at a point on the human skull diametrically opposite the point of impact. The application

J. Hutchinson et al. /Appl. Math. Comput. 96 (1998) 1-16
is limited to linear head acceleration, and so in the evaluation of HIC, the effect of rotational acceleration is ignored. Considering the head as a rigid body and an impact directed eccentrically, the result is a combined effect of translational and rotational accelerations. The magnitude of rotational movement is related to the degree of eccentricity of the acting force and the degree to which the re- mainder of the human structure controls the movement of the head. The rota- tion of the head has an impact over the movement of the neck, and even with HIC < 1000, the neck may break. This is another more serious limitation of the HIC measure.
Several other injury criteria also exist such as the Gadd severity index (SI) [7], J-Tolerance Index (JTI), Revised Brain Model (RBM), Effective Displace- ment Index (EDI) [20], and Maximum Strain Criteria (MSC) [15]. Neck injury criteria have also been developed [13].
2. Necessary conditions
Let f ( x ) be a continuous function defined on an interval, non-negative, and differentiable except at a finite number of points. Suppose further that at those points where f ( x ) is not differentiable that f ( x ) has both a left-hand derivative f - ( x ) and a right-hand derivative f + ( x ) . Let F(s ) = f o f ( X ) dx,
H( s , t) - IF(t) - F(s)] 5 ( t - ,
and
O(s, t) = log H(s , t).
The HIC functional defined in Eq. (1) is equivalent to
HIC -- maxH(s, t), (3) S,I
where the acceleration pulse a(t) is replaced by the general function f ( x ) . Un- der the assumption that So and to maximize H ( s , t), conditions are now derived which the function f ( x ) must satisfy. Since H(s , t) and G(s, t) have the same critical points, compute
OG 5f(t) 3 _ 5 f ( t ) ( t - s) - 3[F(t) - F(s)] Ot F ' ( t ) - F ( s ) t - s (F( t ) - F ( s ) ) ( t - s)
and
3 5 f ( s ) ( t - s ) - 3IF(t) - F ( s ) ] oc -5f(s) Os -- F( t ) - F ( s ) + t ---'-s -- (F( t ) - F ( s ) ) ( t - s)
The first result is due to Chou and Nyquist [3] and is included for completeness.

J. Hutchinson et al. I Applied Mathematics and Computation 96 (1998) 1-16
Theorem 2.1. I f so and to maximize H(s, t), then." (a) f(so) : f( to). (b) (F(to) - F(so))/f(so)(to - So) = ~.
Proof. Solving OG/Os = 0 and OG/Ot = 0 for so and to gives conditions (a) and (b). []
Condition (a) shows that the accelerations at the endpoints of the HIC in- terval (so, to) are equal, and condition (b) indicates that the acceleration at the endpoint of the HIC interval is 3 of the average acceleration within the in- terval; i.e.,
f (so) = f(to) = 3(f(s0, to)),
where
1 ~o '° (f(s0, to)) - to s~o f ( t ) at.
It is not difficult to apply Theorem 2.1 to particular acceleration pulses as the following examples illustrate.
Example 2.2 (Square acceleration pulse). For a square acceleration pulse of amplitude A and duration T
(square) a(t) = A, O <<. t <<. T,
it is clear that f (so) = f(to) = A and HIC = A25T.
Example 2.3 (Nonsymmetric triangular acceleration pulse). Consider a triangular acceleration input with height b, width a, and width at maximum given by c. Define f ( x ) = (b/c)x, d ( x ) = a ( 1 - x / c ) , and h(x )= b ( 1 - x / e ) . The area of the triangular acceleration input as a function of x is then given by
A (x) = f (x )d(x ) + ½h(x)d(x) = d(x)V(x) + ½h(x)],
which yields upon substitution
A ( x ) = ~ a b ( l _ X ) ( 1 + x ) .
Then,
A(x)
f ( x ) d(x)
c + x 2x

Hutchinson et al. / Appl. Math. Comput. 96 (1998) 1-16
and setting A(x ) / f ( x )d (x )= ( c + x ) / 2 x = ~ f rom Theorem 2.1 yields that x = ~ c and y = 3 b; i.e., for a non-symmetric triangular acceleration input the maximum value o f HIC occurs at x = ~ e.
Example 2.4 (Symmetric triangular, half-sine, and parabolic acceleration pulse). Closed form analytic expressions for the HIC value for triangular, half- sine, and parabolic pulses defined by
{ a l ( t ) = - - O<.t<~ T (triangular) T 2
a2(t)=2A 1 - ~ ~<~t<~T.
~t (half-sine) a(t) = A sin ~-
4A t2 4A (parabola)a( t ) = - 7 +- - f - t
are summarized in Table 1. The derivation o f these results can be motivated as in the preceding example, or derived directly following Theorem 2.1 (see [23]).
Theorem 2.5. I f so and to maximize H(s,t) , where so < to, then f+( to) 4 0 and f - (so) >10.
Proof. Suppose f+(to) > 0. Let y = f (so) , D = F(to) - F(s0), and d = to - so. F rom Theorem 2.1, note that 5 y d - 3D = 0 and y = f (so) = f ( to) . Let
(D + yx) ~ G(x) --
(d + x) 3
Then [ ~ _ ] 4 [D _~_.yx ] 4
G'(x)= L + ] ( 5 y d - 3 D + 2 y x ) = L ~ x j zyx.
Hence G(x) is monoton ic increasing for small x. Since f+(to) > 0 for small x, y < f(to + x) and hence D + yx < F(to + x) - F(so). Hence
H(s, t) = G(O) < G(x) <~ H(so, to + x),
Table 1 HIC values of various pulse types
Pulse type so to HIC
Triangle 3/14T 11 / 14T 0.2464A V2 T Half-sine 1/4T 3/4T 0.3845A 5/2 T Parabola 0.147T 0.853T 0.4476A5/2 T

J. Hutchinson et al. / Applied Mathematics and Computation 96 (1998) 1 16 9
which c o n t r a d i c t s the m a x i m a l i t y o f H(so,to). A s imi la r p r o o f gives
f - ( s 0 ) > 0. [ ]
Theorem 2.6. I f so and to maximize H(s, t), where so < to, then neither so nor to is a local maximum o f f ( x ) .
Proo f . S u p p o s e to is a loca l m a x i m u m and , w i t h o u t loss o f genera l i ty , so = 0. N o t e t h a t f ( 0 ) = f ( to) . Let a be such t h a t 0 < a < to a n d f ( x ) ~ f ( O ) for all x such t h a t a~<x~<t0. ( I f to is a loca l m a x i m u m such an a exists . ) Le t
F(x) = foVf(x)dx, t ~ = F ( a ) / a , a n d o~ =F(to) / to . Since (0, to) m a x i m i z e s H(s, t) we have #5a2 <~ o~5t0 2, o r /~ ~< mc 2/5 where c = to/a > 1. By m a x i m a l i t y
~o/f(O) = ~ or f ( 0 ) = }e). C o m p a r i n g a reas we get ~oto - #a < f(O)(to - a) or (,)c - # < f ( 0 ) ( e - 1). Since - / , >~ - (oc 2/s we have
eoc - (oe 2/s ~< mc - / , < f (O)(e - 1) = ~o(e - 1).
H e n c e cance l l i ng ~o gives
c - ~2/~ < ~(c _ 1),
o r
2 c - 5c 2/5 + 3 < O.
I f e = c ~/5 it fo l lows t h a t g f ( e ) = 2e 5 - 5e 2 q- 3 < 0. N o t e t h a t g(1) = 0 a n d
g ' ( e ) = 10e 4 - 10e = 1 0 e ( e - 1)(e 2 + e + 1).
T h e r e a re no r o o t s o f g(e) fo r e > 1 a n d hence g(e) is pos i t i ve for e > 1. T h u s 2c - 5c 2/s + 3 is never nega t ive w h e n c > 1 a n d hence to c a n n o t be a loca l m a x i m u m . S imi l a r ly so c a n n o t be a loca l m a x i m u m . [ ]
3. Location of critical points
In th is sec t ion let s a n d t be such t h a t i f ( s ) > O, f ( s ) = f ( t ) ¢ O, a n d f ' ( t ) < 0. T h e n in s o m e n e i g h b o r h o o d o f t the f u n c t i o n f ( x ) has an inverse g(x). T h a t is fg (y) = y a n d gf (x ) = x fo r smal l x a n d y a n d gf (s ) = t. By the cha in ru le the de r i va t i v e o f gf (x ) at s is f ' ( s ) / f ' ( t ) .
Lemma 3.1. Le t d(x) = g f (x ) - x and D(x) = F (g f ( x ) ) - F(x) in an appropriate neighborhood o f s. Then,
1. d'(s) = f ' ( s ) / f ' ( t ) - 1.
2. D ' ( s ) = f ( , ) d ' ( , ) .
Proof.
D'(s) = X ' (g f ( s ) ) - F'(s) -- f(t)f'(s)f,(t) f ( s ) = f ( s ) [f'(t)[if(s) _ 1]
= f (s )d ' ( s ) . []

l0 J. Hutchinson et al. I Appl. Math. Comput. 96 (1998) 1-16
Next, define
D(x) R(x) - f ( x ) d ( x )
and
h(x) : d (x ) 2 [ D ( x ) ] 5 -- D(x)5 [ d - ~ j - d (x) 3
Theorem 3.2. Let f ( s ) be such that i f ( s ) > O, f ( s ) = f ( t ) # 0 and i f ( t ) < O. Then,
1. h(x) is increasing at s iff R(s) >~ s 3, 2. h(x) is decreasing at s iff R(s) <~ I"
Proof. F r o m the definition of h(x),
h'(x) = [D(x) ]4 [ d(x) J d ' (s)[5f(s)d(s) - 3D(s)].
Since d'(s) < O, h(x) is increasing at x = s iff 5f (s )d(s ) - 3D(s) ~< 0 iffR(s) ~> I" Suppose, in addition, that f ( x ) is concave in the interval [a,b], that is, if a ~< s ~< t ~< b then f ( x ) >1 c f ( s ) + d f ( t ) where x = cs + dt and c + d = 1. Picto- rially the graph o f f ( x ) lies above the straight line joining ( s , f ( s ) ) and ( t , f ( t ) ) for any x between s and t. Note that the tangent (both right and left) lines to f ( x ) lie above the graph o f f ( x ) in the interval [a, b]. Consider the line y = f - ( s ) x + f ( s ) - f - (s)s and y = f + (t)x + f ( s ) - f + (t)t. The coordinates (e, h) o f the intersection are
f ( s ) s - f + ( t ) t e.~_
f ( s ) - f + ( t )
and
If d(s) /m. Note that f ( x ) <. h for all x c [a, b].
h = f ( s ) f + ( t ) ( s - t ) + f ( s ) O c ( s ) - f+( t ) ) f - ( s ) - f + ( t )
m = { f - (s) - f + ( t ) ) / f - ( s ) f +(t), then h = f ( s ) - (t - s ) /m = f ( s ) - []
Theorem 3.3. I f / ' ( s ) > O, f ' ( t ) < O, and f ( x ) is concave in [a, b], then R'(s) < O.
P r o o f . L e t co = D ( s ) / d ( s ) , d ' ( s ) = m f ' ( s ) , a n d m = d ( s ) / ( f ( s ) - h ) . T h e n
R ' ( s ) = f ( s ) d ( s ) D ' ( s ) - D ( s ) f ( s ) d ' ( s ) - D ( s ) d ( s ) f ' ( s )
f ( s ) 2 d ( s ) 2
_ f ( s ) d ( s ) D ' ( s ) - ¢ o d ( s ) f ( s ) d ' ( s ) - o M ( s ) d ( s ) f ' ( s )
- f ( s ) 2 d ( s ) 2

,L Hutchinson et al. I Applied Mathematics and Computation 96 (1998) 1-16
= f ( s ) f ( s ) d ( s ) d ' ( s ) - ~ d ( s ) f ( s ) d ' ( s ) - , o d ( s ) d ( s ) f ' ( s )
f ( s ) 2 d ( s ) 2
= f ( s ) f ( s ) d ( s ) m f ' ( s ) - ~od(s) f (s )mf ' (s ) - tgd(s)d(s) f ' (s)
f ( s ) f ( s )d ( s )d ( s ) f ' (s) f ( s ) - h
f ( s )Zd(s) 2
¢od(s) f (s ) f ' ( s )d(s) oM(s)d(s) f ' ( s ) - f ( s ) - h
11
d(s )d(s ) f ' ( s )
f ( s )2d(s ) 2
DC(s)f(s) - ~of(s) - ogOC(s ) - h)] - f ( s ) f ( s ) d ( s ) d ( s ) ( f ( s ) - h)
i f ( s ) [ f ( s ) f ( s ) - 2cof(s) + (oh] f ( s ) 2 ( f ( s ) - h)
i f ( s ) [ f ( s ) f ( s ) - 2tof(s) + co 2 + (oh - 092] f ( s ) 2 ( f ( s ) - h)
i f ( s ) [(f(s)eg) 2 + og(h - ~o)]. f (s)eOc(s) - h)
This expression is negative since i f ( s ) > O, f ( s ) < h, and 09 < h. []
Since f ( x ) is concave in [a, b] there exists c E (a, b) such that f ( x ) is increas- ing in [a, c) and decreasing in (c, b]. By Theorem 3.3, R(x) has a negative deriv- ative (except at a finite number of points) in [a, c], and since R(x) is continuous it follows that R(x) is strictly decreasing in [a, c]. Hence h(x) can have at most one local maximum in [a, b].
4. Construction of the HIC functional
The computation of the HIC is based on input data obtained from three mu- tually perpendicular accelerometers attached to the head of an ATD. The mag- nitude of the resultant acceleration vector a(t) is plotted as a function of time, and then at the time of initial head contact tl, the average value of the resultant acceleration is found for each of the increments (t2 - tl):
[ 1_~__ F ~ a ( t ) dt] 2'~ (a ( t l , t2 ) ) = ( t2 - - t l ) L t2 - t l ffq
The average acceleration is raised to the power 2.5 and multiplied by the cor- responding time increment ( t2 - - t l ) . This procedure is repeated, increasing tl by 0.001 s for each iteration, and then plotting the resulting functional in terms of tj and t2. There are various ways to simplify the computation of the HIC value

12 J. Hutchinson et al. / Appl. Math. Comput. 96 (1998) 1-16
as described earlier (see [4]), but the approaches do not permit the actual con- struction of the functional, and thus are abandoned. To construct the HIC functional the above direct procedure is numerically implemented.
Algorithm 1. The input is an acceleration versus time graph obtained by experimental data. 2. The graph is linearized in discrete intervals and the equation of each line is
calculated by the slope intercept formula. 3. The slopes and intercepts are stored in an array m[i] and b[i].
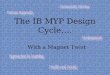
0 25 50 75 100 125 150 175 200 225 250 TIME
Fig. 1. Acceleration input pulse.
25 50 75 1 O0 125 150 175 200 225 250 TIME
Fig. 2. Acceleration input pulse.

J. Hutchinson et al. / Applied Mathematics and Computation 96 (1998) 1-16 13
400
350
300
250
200
150
i00
50
0
/ / 200
/150
50 ~-'~ ~ / / / 1 0 0 100
150 ~-~'-'~-~. ./50
Fig. 3. The HIC functional constructed for the acceleration pulse shown in Fig. 1.
4. The area under the acceleration curve is calculated for the intervals using the trapezoidal rule of integration. During the integration process the accelera- tion values are calculated based on the equation of the line that is applicable for that interval (from m[i] and b[i]).
5. The HIC value is calculated by setting tl equal to the time at the start of the acceleration pulse (the starting time) and varying t2 over the total time inter- val in steps of 0.001 s. The HIC value is calculated by formula (1) and the area under the curve is summed between the applicable interval (from the value stored previously by Step 3). Then tl is incremented by 0.001 s and the procedure is repeated until tl is equal to the end time.
6. The data (HIC, h and t2) are output to a data file for plotting (GNU plot).
7. The average value of HIC, variance, and higher-order moments are comput- ed directly from the data determined in Step 6.
Example 4.1. Two acceleration input pulses depicted in Figs. 1 and 2 are used to illustrate the HIC functionals constructed in Figs. 3 and 4. The HIC values, average HIC value, and HIC standard deviation for the HIC functional shown in (Figs. 3, 4) was determined to be (441.3,634.2), (156.8,299.2), and (112.3,206.8), respectively. The functionals are constructed with different step size for illustration purposes.

14 31 Hutchinson et al. / Appl. Math. Comput. 96 (1998) 1-16
400
350
300
250
200
150
i00
50
0
50
/ / / '200
i00 ~-~--~.. j/
150"~'~"~-'~.~ / I00
200 - "~ .~ / "
Fig. 4. The HIC functional constructed for the acceleration pulse shown in Fig. 2.
5. Conclusions
The mathematical structure of the HIC functional is described, including necessary conditions for the extremal solution and results characterizing the critical points of the functional. A direct enumerative procedure is used to con- struct the HIC functional which allows additional structural information to be extracted from the experimental results. From functional analysis it is well known that a function is completely characterized by its moments. It is thus possible to distinguish between two equivalent HIC functional values by the computation of the higher-order moments such as the average value and HIC variance. These characteristics can be used to quantify design require- ments in various test environments.
References
[1] S.H. Advani, A.K. Ommaya, W. Yang, Head injury mechanisms - Characterizations and clinical evaluation, in: D.N. Ghista (Ed.), Human Body Dynamics: Impact, Occupational, and Athletic Aspects, 1982, pp. 3-37.
[2] Aerospace Standard, Performance standard for seats in civil rotor and transport airplanes, SAE AS 8049, 1966.

J. Hutchinson et al. / Applied Mathematics and Computation 96 (1998) 1-16 15
[3] C.C. Chou, G.W. Nyquist, Analytical studies of the Head Injury Criterion (HIC), SAE Paper 740082, 1974.
[4] C.C. Chou, R.J. Howell, B.Y. Chang, A review and evaluation of various HIC algorithms, SAE Paper 880656, 1988.
[5] Department of Transportation NHTSA Docket 69-7, Notice 9, Occupant crash protection, $6.2 of MVSS 208, 1971.
[6] R.H. Eppinger, Comments during panel discussion on injury criteria, in: A.K. Ommaya (Ed.), Head and Neck Injury Criteria: A Consensus Workshop, US Department of Transportation, NHTSA, Washington DC, 1981, p. 204.
[7] C.W. Gadd, Use of a weighted-impulse criterion for estimating injury hazard, Proceedings of the 10th Stapp Car Crash Conference, SAE Paper 660793, 1966.
[8] W. Goldsmith, The physical process producing head injuries, in: W.F. Careness, A.E. Walker (Eds.), Head Injury Conference Proceedings, Lippincott, Philadelphia, 1966, pp. 350 382.
[9] E.S. Gurdjian, H.R. Lissner, F.R. Latimerr, B.F. Haddad, J.E. Webster, Quantitative determination of acceleration and intercranial pressure in experimental head injury, Neurology 3 (1953) 417~,23.
[10] E.S. Gurdjian, V.R. Hodgsom, W.G. Hardy, L.M. Patrick, H.R. Lissner, Evaluation of the protective characteristics of helmets in sports, J. Trauma 4 (1964) 273 286.
[11] E.S. Gurdjian, V.L. Roberts, L.M. Thomas, Tolerance curves of acceleration and intracranial pressure and protective index in experimental head injury, J. Trauma 6 (1966) 600 604.
[12] W. Hardy, T.B. Khalil, A.I. King, Literature review of head injury biomechanics, Int. J. Impact Eng. 15 (4) (1994) 561 586.
[13] D. Kallieris, R. Mattern, E. Miltner, G. Schmidt, K. Stein, Considerations for a neck injury criterion, SAE Trans. 100 (6) (1991) 2049-2065.
[14] L. Krantz, What The Odds Are, Harper Perennial, New York, 1992. [15] H.M. Lankarani, S.R. Malapati, R. Menon, Evaluation of Head Injury Criteria, NIAR
Report 93-2, Wichita State University, USA. [16] H.M. Lankarani, Current issues regarding aircraft crash injury protection, Proc. NATO-ASI
on Crash Worthiness of Transportation Systems, Structural Impact, and Occupant Protection, Tr6ia, Portugal, 1996, pp. 285 318.
[17] D.R. Lemmon, R.L. Huston, Automobile hood/fender design optimization for improved pedestrian head impact protection, 20th Design Automation Conference Proceedings 69 (2) (1994) 569 577.
[18] F.J. Lockett, Biomechanics justification for empirical head tolerance criteria, J. Biomechanics 18 (1985) 217-224.
[19] C.J. Long, T.A. Novack, Postconcussion symptoms after head trauma: interpretation and treatment, South Med. J. 79 (1986) 728-732.
[20] S.S. Margulies, L.E. Thibault, Proposed tolerance criterion for diffuse axonal injury in man, J. Biomechanics 25 (8) (1982) 917-923.
[21] S.G. Mentzer, Efficient computation of head injury criterion (HIC) values, DOTHS-806-681, 1984.
[22] J.A. Newman, Head Injury Criterion in automotive crash testing, Proc. 24th Stapp Car Crash Conference, SAE Paper 801317, 1980.
[23] H. Onusic, H1C (Head Injury Criterion) and SI (Severity Index) of impacts with different pulse shapes, Int. J. Vehicle Design 16 (2/3) (1995) 194-202.
[24] P. Prasad, H. Mertz, The position of the United States delegation to the ISO working group 6b on the use of HIC in the automotive environment, SAE Paper 821246, 1982.
[25] B,E. Rodden, T.J. Bowden, J.K. Reichert, An algorithm for determining the Head Injury Criterion (HIC) from records of head acceleration, SAE Paper 830469, 1983.

16 J. Hutchinson et al. / Appl. Math. Comput. 96 (1998) 1-16
[26] J.S. Ruan, T.B. Khalil, A.I. King, Finite element modeling of direct head impact, Proc. 37th Stapp Car Crash Conference, SAE Paper 933114, 1993.
[27] M.S. Sanders, E.J. McCormick, Human Factors in Engineering and Design, 6th ed. McGraw- Hill, New York, 1987.
[28] L, Thibault, F.A. Bandak, Mechanisms of impact head injury, Int. J. Impact Eng. 4 (1994) 535 560.
[29] J. Versace, A review of the severity index, Proc. l 5th Stapp Car Crash Conference, SAE Paper 710881, 1971.