Embed Size (px)
Citation preview

GRAPHICAL MODELS AND IMAGE PROCESSING
Vol. 60/2, No. 2, March, pp. 125–135, 1998ARTICLE NO. IP980465
The Crust and the β-Skeleton: CombinatorialCurve Reconstruction
Nina Amenta1
Computer Sciences Department, University of Texas at Austin, Austin, Texas 78712
Marshall Bern
Xerox PARC, 3333 Coyote Hill Road, Palo Alto, California 94304
and
David Eppstein2
Department of Information and Computer Science, University of California at Irvine, Irvine, California 92697
Received March 18, 1997; revised December 1, 1997; accepted December 30, 1997
We construct a graph on a planar point set, which captures itsshape in the following sense: if a smooth curve is sampled denselyenough, the graph on the samples is a polygonalization of the curve,with no extraneous edges. The required sampling density varies withthe local feature size on the curve, so that areas of less detail canbe sampled less densely. We give two different graphs that, in thissense, reconstruct smooth curves: a simple new construction whichwe call the crust, and the β-skeleton, using a specific value of β.c© 1998 Academic Press
1. INTRODUCTION
There are many situations in which a set of sample pointslying on or near a surface is used to reconstruct a polygonal ap-proximation to the surface. In the plane, this problem becomes asort of unlabeled version of connect-the-dots: we are given a setof points and asked to connect them into the most likely polygo-nal curve. We show that under fairly generous and well-definedsampling conditions either of two proximity-based graphs de-fined on the set of points is guaranteed to reconstruct a smoothcurve. These two graphs are thecrust, which we define below,and theβ-skeleton, defined 10 years ago by Kirkpatrick andRadke [1], with an appropriately chosen value ofβ.
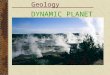
Figure 1 shows an example of a point set and its crust. Thepoints were chosen by hand. Notice that fewer samples are re-quired on the goose’s back than on its head and foot.
1 Most of this work was done at Xerox PARC, partially supported by NSFGrant CCR-9404113.
2 Work supported in part by NSF Grant CCR-9258355 and by matching fundsfrom Xerox Corp. and performed in part while visiting Xerox PARC.
The reconstruction of curves in the plane is important in com-puter vision. Simpleedge detectorsselect image pixels whichare likely to belong to edges, often delimiting the boundaries ofobjects. Grouping these pixels into likely curves is an area of ac-tive research. Extension of our ideas to three dimensions wouldbe useful for constructing three-dimensional models from laserrange data, stereo measurements, and medical images.
2. DEFINITIONS
In this paper, we will consider closed, compact, twice-differen-tiable 1-manifolds, without boundary, embedded in the plane;we shall call such a manifold asmooth curve. According toour definition, then, a smooth curve can have several connectedcomponents, but no endpoints, branches, or self-intersections.Let F be a smooth curve andS⊂ F a finite set of sample pointson F .
DEFINITION. A polygonal reconstructionof F from S is agraph that connects every pair of samples adjacent alongF , andno others.
Clearly no algorithm can reconstructanycurve fromanysetof samples; we need some condition on the quality ofS. Ourcondition will be that the distance from any pointp on F tothe nearest samples∈ S is at most a constant factorr times thelocal feature sizeat p, which we define to be the distance fromp to themedial axisof F (see Section 4). This condition has theattractive property that less detailed sections of the curve do nothave to be sampled as densely.
Given a sampleS from a smooth curve which meets the sam-pling condition for an appropriately small value ofr , we showthat a polygonal reconstruction is given by either of the twographs defined below.
1251077-3169/98 $25.00
Copyright c© 1998 by Academic PressAll rights of reproduction in any form reserved.

126 AMENTA, BERN, AND EPPSTEIN
FIG. 1. A point set and itscrust.
We shall say that a diskB touchesan objectx if the intersectionB ∩ x is a subset of the boundary ofB (that is, we mean thatB “just touches”x). We say thatB is emptyof points inx if itsinterior contains no points ofx. The graph definitions are bothrelated to the Voronoi diagram and Delaunay triangulation ofS(for more on the Voronoi diagram and Delaunay triangulationsee any of the standard computational geometry texts, e.g., [2],[3], or [4]), (see Fig. 2), and we shall refer to the followingwell-known property:
EMPTY CIRCLE PROPERTY. Two points inSdetermine an edgeof the Delaunay triangulation if there is a diskB, empty of pointsin S, which touches them both.
We now define the graphs we will use for reconstruction.
DEFINITION. Let S be a finite set of points in the plane, andlet V be the vertices of the Voronoi diagram ofS. Let S′ be theunionS∪ V , and consider the Delaunay triangulation ofS′. Anedge of the Delaunay triangulation ofS′ belongs to thecrustofS if both of its endpoints belong toS.
An alternate definition can be given using the empty circleproperty:
FIG. 2. A Voronoi diagram of a point setSand the Delaunay triangulation ofS∪ V , with the crust highlighted.
ALTERNATE DEFINITION. Let S be a finite set of points in theplane, and letV be the vertices of the Voronoi diagram ofS. Anedge between pointss1, s2 ∈ Sbelongs to thecrustof S if thereis a disk, empty of points inS∪ V , touchings1 ands2.
The intuition behind the definition of the crust is that theverticesV of the Voronoi diagram ofSapproximate the medialaxis of F , and the Voronoi disks ofS′ = S∪ V approximateempty circles betweenF and its medial axis. Note that if an edgebetween two points ofS belongs to the Delaunay triangulationof S′ it certainly belongs to the Delaunay triangulation ofS, andhence the crust ofSis a subset of the Delaunay triangulation ofS.
We now review the definition of theβ-skeleton. Letβ ≥ 1 bea constant. An edge is present in theβ-skeleton if the followingforbidden regionis empty of points ofS.
DEFINITION. Let s1, s2 be a pair of points in the plane, atdistanced(s1, s2). Theforbidden regionof s1, s2 is the union ofthe two disks of radiusβ d(s1, s2)/2 touchings1 ands2.
Examples of the forbidden region for different values ofβ areshown in Fig. 3. Reasonable definitions forβ ≤ 1 can also bemade; see [1].

THE CRUST AND THEβ-SKELETON 127
FIG. 3. Forbidden regions forβ = 1, 3/2, 2.
DEFINITION. Let S be a finite set of points in the plane. Anedge betweens1, s2∈ S belongs to theβ-skeleton ofS if theforbidden region ofs1, s2 is empty.
The β-skeleton, like the crust, is a subset of the Delaunaytriangulation. Values ofβ which are either too large or too smallrequire denser sampling, and hence smaller values ofr , to guar-antee reconstruction. The largest value ofr for which we canguarantee reconstruction corresponds to a value ofβ = 1.70.
Both the crust and theβ-skeleton are very easy to com-pute, given a good program for the Delaunay triangulation andVoronoi diagram of points in the plane; see [5], among others. Tocompute the crust, one computes the Voronoi diagram ofS, com-binesSwith the setV of Voronoi vertices to makeS′ = S+ V ,computes the Delaunay triangulation ofS′, and finally selectsfrom the result all those edges whose two endpoints lie inS.For theβ-skeleton, one computes the Delaunay triangulation ofS and then selects each edgee for which the circumcircles ofthe adjacent triangles are centered on opposite sides ofe andboth have radius greater thanβ/2 times the length ofe. In eithercase the running time is bounded by the time required to com-pute the Vorronoi diagram and Delaunay triangulation, which isO(n logn), for n = |S|.
3. PREVIOUS WORK
Our work draws on a variety of sources. The closest line ofresearch concerns shape recognition for computer vision. Theemphasis there is on the closely related problem of estimating themedial axis from a set of boundary points. Brandt and Algazi [6]showed that the Delaunay triangulation of a sufficiently denseset of samples contains a reconstruction of the boundary as asubset of its edges (a slightly weaker version of our Theorem12). Robinson, Colchester, Griffin, and Hawkes [7] proposedselecting the boundary reconstruction edges by comparing thelength of dual Voronoi and Delaunay edges; our paper essentially
gives two equally easy and provably better filtering algorithms.Ogniewicz [8] studied the computation of an approximate medialaxis from a densely sampled boundary and used the approximatemedial axis to produce successively simpler representations ofthe boundary. Similar ideas were used by O’Rourke, Booth,and Washington [9], who proposed reconstructing simple closedpolygons in the plane from a set of points by choosing a subsetof the Delaunay triangulation so as to optimize the approximatemedial axis of the resulting polygon.
A successful earlier computational geometric approach todefining the shape of a set of points is theα-shape, introducedby Edelsbrunner, Kirkpatrick, and Seidel [10] and studied exten-sively by Edelsbrunner and others. Theα-shape is a simplicialcomplex defined on a set of points in arbitrary dimensiond;k ≤ d + 1 points are connected into a (k − 1)-simplex if theytouch an empty ball of radiusα. Theα-shape tends to work wellfor sample points which are evenly distributed in the interiorof an object, and has proved particularly useful for modelingmolecules. Butα-shapes are often unsatisfying for reconstruct-ing surfaces; the user needs to find the correct value of the thresh-old α, and the sameα has to apply to the whole data set.
In this paper we continue the study of theβ-skeleton, whichwas defined by Kirkpatrick and Radke [1]. Up until now it hasbeen assumed that the parameterβ, like α, needs to be foundby the user. For our reconstruction problem, we give a valuefor β which is guaranteed to work whenS meets the samplingcondition.
Theγ -neighborhood graph, introduced by Veltkamp [11], is ageneralization of theβ-skeleton in which the two forbidden disksmay have different radii. We believe that results similar to ourscan be proved for a suitably defined family ofγ -neighborhoodgraphs, in which the angle between the two circles at the pointof intersection (see Observation 16) is fixed at an optimal value,probably a bit more thanπ/2.
We have recently become aware of two concurrent indepen-dent research efforts related to ours. Attali [12] proved thatuniformly sampled curves can be reconstructed by (essentially)the above-mentioned family ofγ -neighborhood graphs. She re-quired the sampling density to be everywhere great enough toresolve the finest detail of the curve. Our results are better in thatthey allow the sampling density to vary along with the level ofdetail. Melkemi [13] defined anA-shapeon a setSof points asfollows: let S′ be the union ofS with an arbitrary set of pointsA. An edge of the Delaunay triangulation ofS′ belongs to theA-shape if both of its endpoints belong toS. Our crust is anA-shape for whichA is the set of Voronoi vertices.A-shapes forother choices ofAmay also have interesting provable properties.
4. THE MEDIAL AXIS
In this section we review the definition of themedial axis[14]and prove some useful lemmata about it. The medial axis can bethought of as the Voronoi diagram generalized to an infinite setof input points.

128 AMENTA, BERN, AND EPPSTEIN
FIG. 4. The light curves are the medial axis of the heavy curves.
DEFINITION. Themedial axisof a curveF is closure of theset of points in the plane which have two or more closest pointsin F .
Figure 4 shows the medial axis of a smooth curve. Note thatwe include components of the medial axis on either side of thecurve, so that some components of the medial axis may extendto infinity. Note also that since we define the medial axis to be aclosed set, it includes the centers of all emptyosculating disks(the empty disks tangent toF with matching curvature), whichare its limit points. The medial axis can be defined similarly fora (d − 1)-dimensional surface inRd.
Many of our arguments will be based on the following topo-logical lemma. Note that it concerns two distinct kinds of disks:circular Euclidian disks and topological 1-disks, that is, curvesegments.
LEMMA 1. Any (Euclidean) disk B containing at least twopoints of a smooth curve F in the plane either intersects thecurve in a topological 1-disk or contains a point of the medialaxis (or both).
Proof. If B∩ F is a topological disk there is nothing toprove, so assume thatB ∩ F is not a topological disk. If someconnected componentf of B ∩ F is a closed loop, forminga Jordan curve in the interior ofB, then there is a connectedcomponent of the medial axis interior tof which is entirelycontained inB, and we are done.
OtherwiseB ∩ F consists of two or more connected compo-nents. Letc be the center ofB, and letp be the closest point onF to c. If p is not unique, thenc is a point of the medial axis andwe are done. Otherwisep lies in a unique connected componentf p of B ∩ F . Consider the pointq closest toc in some otherconnected componentfq. Any pointx on the line segment (c,q)is closer toq than to any point outsideB, so the closest pointof F to x is always some point on one of the connected com-ponents ofB ∩ F . Since at one end of the segment the closestconnected component isf p, and at the other it isfq, at somepoint x the closest connected component must change. Pointxhas two closest points on two distinct connected componentsand so is a point of the medial axis.
A Voronoi diskof a finite setSof points is a maximal emptydisk centered at a Voronoi vertex ofS. Each Voronoi disk has atleast three points ofSon its boundary and none in its interior.
LEMMA 2. In the plane, any Voronoi disk B of a finite setS⊂ F, where F is a smooth curve, must contain a point of themedial axis of F.
Proof. Let B be a Voronoi disk of S. Assume first that inthe neighborhood of one of the sampless ∈ S on the boundaryof B, F − s is contained completely inB. Then eitherB ∩ Fis entirely contained in the boundary ofB and the center ofBis a point of the medial axis, or shrinkingB slightly aroundits center will produce a smaller diskB′, contained inB, withB′ ∩ F consisting of at least two connected components. ByLemma 1B′ contains a point of the medial axis. If there is nosuchs, then the intersection ofF with B already consists of atleast two connected components, andB contains a point of themedial axis by Lemma 1.
Note. This lemma does not hold in dimension three; anarbitrarily dense sampleSon a smooth surfaceF can have verysmall Voronoi balls centered on the surfaceF itself (or anywhereelse), which are very far from the medial axis. Such a ball can beconstructed as follows: select a pointp on the surfaceF , p /∈ S.Construct a small ballB aroundp, empty of samples, and addfour new samples toSon the intersectionB∩ F . Such examplesarise naturally with grid-like sample sets.
5. SAMPLING
In this section we define our sampling condition. Our con-dition is based on alocal feature sizefunction, which in somesense quantifies the local “level of detail” at a point on smoothcurve. Local feature size functions are used in the computationalgeometry literature on mesh generation; the term was first used,to the best of our knowledge, by Ruppert [15] (with a similardefinition).
DEFINITION. Thelocal feature size, LFS(p), of a pointp∈ Fis the Euclidean distance fromp to the closest pointm on themedial axis.
It might clarify this definition to observe that the segment oflengthLFS(p) between a pointp ∈ F and the closest pointmon the medial axis ofF is perpendicular to the medial axis, notto F (see Fig. 5).
Notice that, because it uses the medial axis, this definition oflocal feature size depends on both the curvature atp and theproximity of nearby features.
We can now define the sampling condition we will require forcurve reconstruction in terms of theLFSfunction.
DEFINITION. F is r-sampledby a set of sample pointsS ifeveryp ∈ F is within distancer LFS(p) of a samples ∈ S.
We shall be concerned with values ofr ≤ 1.

THE CRUST AND THEβ-SKELETON 129
FIG. 5. LFS(p) is the distanced(p,m), not the perpendicular distanced(p,m′) to the center of the largest empty tangent ball atp.
Armed with this definition of local feature size, we can clarifythe intuition that a small enough disk intersects a curve in atopological 1-disk. The following are corollaries of Lemma 1.
COROLLARY 3. A disk containing a point p∈ F, with diam-eter at most LFS(p), intersects F in a topological disk.
Proof. Consider the contrapositive: any diskB containingp that doesnot intersectF in a topological disk contains a pointm of the medial axis, by Lemma 1. The closest point top on themedial axis is at distanceLFS(p) from p, sod(p,m) ≥ LFS(p).SinceB contains the segment (p,m), its diameter is greater thanLFS(p).
COROLLARY 4. A disk centered at a point p∈ F, with radiusat most LFS(p), intersects F in a topological disk.
Proof. Similar to Corollary 3.
The following objects were defined by Chew [16], from whomwe borrow the idea of polygonalizing a curve using emptydisks centered on the boundary. We take responsibility for thenames.
DEFINITION. A curve Voronoi diskis a maximal disk, emptyof sample points, centered at a point of the curve. AcurveVoronoi vertexis the center of a curve Voronoi disk.
Note that acurve Voronoi vertexis the restriction of an edgeof the Voronoi diagram ofS to the curveF .
COROLLARY 5. A curve Voronoi disk on an r-sampled smoothcurve F, r≤ 1, intersects F in a topological disk.
Proof. Follows from Corollary 4.
For larger , it is possible for there to be a setSof points thatr -samples two topologically different curves, as in Fig. 6. Thesample points are placed at the vertices of two regular octagons,positioned so that two adjacent pairs of vertices form a square.The points 1-sample two different curves, one having a singleconnected component and the other having two.
OBSERVATION 6. Let S be a set of points in the plane. Theremay not be a unique graph on S that is the polygonal recon-struction of a smooth curve r-sampled by S, for r≥ 1.
For considerably smallerr , we shall show that there is onlyone possible reconstruction and that our graphs find it.
6. FLATNESS
Considering the definition of the medial axis, and referringback to Fig. 5, we observe the following:
LEMMA 7. A disk tangent to a smooth curve F at a point pwith radius at most LFS(p) contains no points of F in its interior.
Proof. The perpendicular distance fromp to the pointm′
on the medial axis that is the center of the largest empty tangentdisk at p is at leastLFS(p). The tangent disk of radiusLFS(p)at p must therefore be contained in the largest tangent disk andhence is also empty.
We use this lemma to show quantitatively that the intersectionof a smooth curve with a small enough disk is not only a topo-logical disk but also rather flat. The calculations will be basedon simple geometric facts about the angles and points labeled inFig. 7. Roughly speaking, we can think ofs as a sample andpas an adjacent curve Voronoi vertex. Letr be the distance froms to p, and let the distance forms to c, and the distance frompto c, equal 1.
OBSERVATION 8. It is easy to verify the following:
i. The length of segment(s, x) is sin(γ ).ii . r = d(s, p) = 2 sin(γ /2), soγ = 2 arcsin(r/2).iii . The angleα = γ /2= arcsin(r/2).iv. The angle between the tangent line L at p and thesegment(s, p) is α = arcsin(r/2).
LEMMA 9. For an r-sampled curve in the plane, r< 1, theangle formed at a curve Voronoi vertex between two adjacentsamples is at leastπ − 2 arcsin(r/2).
FIG. 6. The 16 points 1-sample both heavy curves. The light lines are themedial axes.

130 AMENTA, BERN, AND EPPSTEIN
FIG. 7. Line L is tangent to the circle atp. d(c, p)= d(c, s)= 1 andd(s, p) = r .
Proof. Let p, in Fig. 7, be the curve Voronoi vertex, andlet the diskB centered atc be a tangent disk of radiusLFS(p),which we assume without loss of generality to be equal to 1.The curveF does not intersect the interior ofB, so the sharpestangle is achieved when the adjacent sample points lie on theboundary ofB at distancer from p, as doess in the figure.The angle formed atp is thenπ − 2α = π − 2 arcsin(r/2)(Observation 8).
A very similar argument shows
LEMMA 10. For an r-sampled curve in the plane, r< 1,the angle spanned by three adjacent samples is leastπ − 4arcsin(r/2).
7. POLYGONAL RECONSTRUCTION
We now begin our study of curve reconstruction by showingthat for a denselyr -sampled curve, the Delaunay triangulationof the samples contains, as a subset of its edges, a polygonalreconstruction of the curve.
LEMMA 11. Let F be an r-sampled smooth curve in the plane,r ≤ 1. There is a curve Voronoi disk touching each pair of adja-cent samples.
Proof. Let s1, s2 be two samples adjacent alongF . The in-terval of F betweens1 ands2 crosses the bisector ofs1, s2 atleast once, so letp be one such crossing point. LetB be themaximal disk centered atp which has no sample in its interior.If s1 ands2 are on the boundary ofB, thenB is a curve Voronoidisk touchings1 ands2.
Otherwise the maximality ofB implies thatB touches somethird samplesi . Sincep lies betweens1 ands2 on F , si does notlie betweens1 ands2 on F , p is insideB, s1 ands2 are outsideB,andB touchessi , B must intersectF in at least two connectedcomponents. In that caseB must contain a point of the medialaxis, by Lemma 1, and the radius ofB is greater thanLFS(p),by the definition of local feature size. Since there is no samplewithin distanceLFS(p) of p, this contradicts the assumption thatF is r -sampled, withr ≤ 1.
THEOREM 12. Let F be an r-sampled smooth curve in theplane, r< 1. The Delaunay triangulation of the set S of samplescontains an edge between every adjacent pair of samples.
Proof. Implied immediately by Lemma 11 and the emptycircle property.
Note. Brandt and Algazi [6] also showed that adjacent pointson a densely sampled curve are separated by a Voronoi edge (thedual statement of Theorem 12). Letd∗ be the minimum, over allpointsp ∈ F , of LFS(p). Their sampling condition is that everypoint p must have a sample within distanced∗.
The polygonal reconstruction is close to the curve in the fol-lowing sense:
THEOREM 13. The distance from a point p on an r-sampledsmooth curve F to some point on the polygonal reconstructionof the samples is at most(r 2/2)LFS(p).
Proof. Let p be the point ofF between two sampless1 ands2 which is farthest from the reconstruction. Assuming withoutloss of generality thatLFS(p) = 1, then the distance frompto the nearer of the two samples, says1, is at mostr . Since thecurve is smooth andp is maximally distant from the segment(s1, s2), the tangent atp is parallel to (s1, s2). The disk of radius1 tangent to the curve atp is empty of sample points, so themaximal distance fromp to (s1, s2) is achieved whens1 lieson the surface of the disk, at distancer from p, once again asin Fig. 7. The distanced(p, x) there isr sinα = r sinγ /2 =r sin(arcsin(r/2)) (Observation 8).
Note. The distance from the reconstruction toF is, like therequired sampling density, scale invariant; the reconstructionin areas of less detail, which are sampled less densely, can befarther away from the curve. Theorem 13 implies that to obtaina reconstruction that is everywhere within a constant distancedof F , every pointp on F should have a sample within distance√
2d LFS(p).
In the following sections we give criteria for selecting theedges of the polygonal reconstruction from the Delaunay trian-gulation.
8. THE CRUST
We now prove that for small enoughr , the crust edges fallexactly between adjacent vertices. First we show that all thedesired edges belong to the crust and then that no undesirededges do.
THEOREM 14. The crust of an r-sampled smooth curve, r<0.40, contains an edge between every pair of adjacent samples.
Proof. An edge appears in the crust if and only if there isa circle touching its endpoints which is empty of both samplepoints and Voronoi vertices. We claim that this is true of everycurve Voronoi disk on anr -sampled smooth curve. There is

THE CRUST AND THEβ-SKELETON 131
a curve Voronoi disk touching every pair of adjacent vertices(Lemma 11), so this claim establishes the theorem.
Let B be a curve Voronoi disk centered atp. By definition,B cannot contain a sample point. To see thatB cannot con-tain a Voronoi vertex, consider Fig. 8. The pointv is a Voronoivertex which, we assume for the purpose of contradiction, fallswithin B. We assume, once again without loss of generality, thatLFS(p) = 1.
Sincev is a Voronoi vertex, the radiusR of the Voronoi circleV aroundv is at most the distance to the nearer of the twosamples inducingp. This Voronoi circle must contain a pointof the medial axis (Lemma 2). On the other hand, the diskB′
of radiusLFS(p) = 1 aroundp cannotcontain a point of themedial axis, by the definition of local feature size.
We now chooser so thatV lies entirely withinB′, establishingthe contradiction. Any point inV is at most distancer + R fromp, andR is maximized whenv lies on the boundary ofB. In thiscaseR is the length of the base of an isoscales triangle whoseother two edges have lengthr . Since the curve is pretty flat atp (Lemma 9), the angleψ at p opposite the base is at most12(π + 2 arcsin(r/2)), andR/2≤ r sinψ/2. So we want
r + 2r sin
(π + 2 arcsin(r/2)
4
)≤ 1.
The parenthetical quantity is less thanπ/2 for r in the interval[0, 1], so the left-hand side is increasing in that interval. Choosingr ≤ 0.40 satisfies the inequality.
THEOREM 15. The crust of an r-sampled smooth curve doesnot contain any edge between nonadjacent vertices, forr < 0.252.
Proof. We need to show that there is no circle, empty of bothVoronoi and sample points, touching any two nonadjacent sam-
FIG. 8. The construction of Theorem 14.
FIG. 9. The construction of the contradiction in Lemma 15.
ple pointss andt . We assume, for the purpose of contradiction,that there is such a circleB, as in Fig. 9.
Consider the two circlesV,V ′ touchingsandt and centered atthe pointsv, v′ at whichB intersects the perpendicular bisectorof s andt .
We claim that ifB is empty of Voronoi points, thenV andV ′
are empty of sample points. For if one of them were nonempty, itwould contain a samples′ determining a minimal circle touchings, t , ands′, empty of all other samples and hence inducing aVoronoi vertex inside ofB.
Consider for a moment Fig. 10, which is a closeup of thesituation ats. The angleω between the tangents to the circlesV,V ′ at s is equal toπ/2 (since the lower half-circle ofB,containings, is the locus of points which form a right angle withv andv′, and the tangents are perpendicular to (v, s) and (v′, s)).
The angle6 (s1, s, s2) is at leastπ − 4 arcsin(r/2) (Lemma10). Without loss of generality letV be the circle such that the
FIG. 10. The angleψ between the tangent and the chord is greater than thecorresponding angle on the other side.

132 AMENTA, BERN, AND EPPSTEIN
angleψ between the tangent toV at s and the chord (s, s2) isgreater than the corresponding angle on the other side. Thenψ ≥ 1/2(π − 4 arcsin(r/2)− π/2) = π/4− 2 arcsin(r/2). Ifwe assume, once again with no loss of generality, that the radiusof V is equal to 1, this bound onψ implies (Observation 8) thatd(s, s2) ≥ 2 sin(π/4− 2 arcsin(r/2)).
There isacurveVoronoivertexpbetweensands2 (Lemma11),and hence, since the curve isr -sampled, sin(π/4−2 arcsin(r/2))≤ rLFS(p).
We now give an upper bound forLFS(p), so as to derive acontradiction. The samplessandt are on two different connectedcomponents of the intersectionF ∩ V , soV contains a point ofthe medial axis (Lemma 1). The pointp lies in V , which hasradius 1, soLFS(p) ≤ 2. Thus
sin(π/4− 2 arcsin(r/2))≤ 2r.
The right-hand side is increasing inr , while the left-hand sideis decreasing inr in the range [0, 1]. Choosing 0< r ≤ 0.252violates the inequality, producing a contradiction.
9. THE ββ-SKELETON
In this section, we show that with an appropriately chosenvalue ofβ, theβ-skeleton of the samples on anr -sampled smoothcurve forms a polygonal reconstruction of the curve. To simplifyour calculations, we sometimes define the forbidden region ofan edge in terms of the angle between the two forbidden circles,rather than the length of the edge (see Fig. 11).
OBSERVATION 16. Let s1, s2 be a pair of points in the plane,let β ≥ 1, and letφ = arcsin1/β. The tangents to the two disksof radius d(s1, s2)β/2 touching s1 and s2 form an angle of2φat s1 and s2.
LEMMA 17. Let s1, s2, s3 be three successive samples on anr-sampled smooth curve. Whenφ > 4 arcsin(r/2), s3 cannot liein the forbidden region of the edge(s1, s2).
Proof. If we chooseφ so that the angle6 (s1, s2, s3) > π −φ,thens3 cannot lie in the forbidden region of (s1, s2). Since thecurve is r -sampled,6 (s1, s2, s3) is at leastπ − 4 arcsin(r/2)(Lemma 10).
FIG. 11. Forbidden regions can be defined byβ or φ.
FIG. 12. The construction of Lemma 18.
LEMMA 18. The forbidden region of an edge between twoadjacent samples on an r-sampled smooth curve cannot containa point of the medial axis, whenφ >arcsin(2 sin(2 arcsin(r/2))).
Proof. Let s1 ands2 be adjacent samples. Letp be a curveVoronoi vertex betweens1 ands2 (Lemma 11). We assume with-out loss of generality thatLFS(p)= 1.
We begin by choosingφ so that the radiusR of the cir-cles defining the forbidden region of (s1, s2) is at most 1/2.R= d(s1, s2)/(2 sinφ). And, since LFS(p)= 1, d(s1, s2)≤2 sin(2 arcsin(r/2)) (Observation 8), so we chooseφ > arcsin(2 sin(2 arcsin(r/2))).
The sampless1 ands2 must lie outside the interior of the twotangent circles of radius 1 atp, so there is a circle of radius atleast 1, touchingp, s1, ands2. SinceR ≤ 1, and the forbiddendisks also touchs1 ands2, p must lie in the interior of both ofthe forbidden disks, as in Fig. 12. SinceR≤ 1/2, the forbiddenregion lies entirely within the circle of radius one aroundp,which by the definition of the local feature size does not containa point of the medial axis.
LEMMA 19. Theβ-skeleton of an r-sampled smooth curvedoes not contain an edge between any pair of nonadjacent sam-ples, whenφ < arccos(2r )− 2 arcsin(r/2).
Proof. The proof of this theorem is similar to that of Theo-rem 15, so this presentation is somewhat sketchy. We lets, t ∈ Sbe two samples, not adjacent onF , and replace the circlesVandV ′ in that proof with the forbidden circlesB andB′ of thepotential edge (s, t), as in Fig. 13.
The angle between the tangents ofB and B′ at s is 2φ.The angle6 (s1, s, s2) is at leastπ − 4 arcsin(r/2) (Lemma 10).On one side ofs, without loss of generality the side ofs2,the angleψ between the chord (s, s2) and the tangent toB ats is at leastπ/2 − 2 arcsin(r/2) − φ. Assuming without lossof generality that the radius ofB is equal to 1, we find

THE CRUST AND THEβ-SKELETON 133
(Observation 8) that the lengthd(s, s2)≥ 2 sin(π/2− 2 arcsin(r/2)− φ) = 2 cos(2 arcsin(r/2)+ φ), and that at the surfaceVoronoi vertex p betweens and s2, rLFS(p) ≥ cos(2 arcsin(r/2)+ φ).
Again, sinceB has radius 1 and intersects the curveF intwo connected components,LFS(p) ≤ 2 (Lemma 1 and thedefinition ofLFS(p)) so we have
cos(2 arcsin(r/2)+ φ) ≤ 2r.
To produce a contradiction, we chooseφ so as to violate thisinequality:
φ < arccos(2r )− 2 arcsin(r/2).
THEOREM20. Let S r-sample a smooth curve, with r≤ 0.297.Theβ-skeleton of S contains exactly the edges between adjacentvertices, forβ = 1.70.
Proof. Lemma 19 established that theβ-skeleton containsno edges between nonadjacent vertices for
φ < arccos(2r )− 2 arcsin(r/2). (1)
Let s1, s2 be two adjacent samples, and lets0 ands3 be the othersamples adjacent tos1, s2, respectively. There would fail to bean edge betweens1 and s2 if some third sample fell into theforbidden region. Lemma 17 implies that neithers0 nor s3 canlie in forbidden region when
φ > 4 arcsin(r/2). (2)
If some other samplesi lay in the forbidden region, buts0 ands3
did not, that would imply that one of the forbidden circles inter-sectsF in at least two connected components (one containings1 and the other containingsi ) and hence must contain a pointof the medial axis (Lemma 1). This cannot occur when
φ > arcsin2 sin 2 arcsin(r/2) (3)
(Lemma 18). These three functions are plotted in Fig. 14. Allthree inequalities are satisfied in the shaded region. There is a
FIG. 13. The forbidden region is drawn horizontally.
FIG. 14. The three functions from Theorem 18, plotted inMathematicaand annotated withidraw .
feasible choice ofφ for any r < 0.297. The value ofφ whichallows the sparsest sampling, maximizingr , is roughlyφ =0.637, which corresponds toβ = 1.70.
Note that this value forβ is not likely to be the optimal one;it is just the value corresponding to the largestr for which oursomewhat crude bounds allow us to prove that anr -samplingyields a correct reconstruction.
10. IMPLEMENTATION AND EXAMPLES
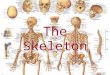
We implemented the two reconstruction algorithms using theDelaunay triangulation and Voronoi diagram programs in Shew-chuk’sTriangle package [5], generating data with an inter-active Java front end. Some sample outputs are shown in Fig. 15.
The crust and theβ-skeleton are identical on any point setS which is a 0.253-sample of a smooth curveF , since theyboth produce a correct reconstruction. They are often identicalin practice for larger values ofr ; in the example at the top ofFig. 15,r > 1/2. On more sparsely sampled curves, such as theexample in the center, the crust is usually more liberal in addingedges. Note thatβ-skeletons and crusts can contain vertices ofdegree 1 or degree 3. Vertices of degree 4 or greater cannot occurin crusts, while the maximum degree in aβ-skeleton dependson the choice ofβ. The example on the bottom suggests that acurve can be reconstructed fairly well in the presence of sparseadded noise. Notice the unusual occurrence, in this last example,of an edge in theβ-skeleton which is not in the crust.
11. CONCLUSION AND OPEN QUESTIONS
We can summarize our main results as follows. LetS be anr -sample from a smooth curveF . For r ≤ 1, the Delaunay tri-angulation ofScontains the polygonal reconstruction ofF . Forr ≤ 0.40, the crust ofScontains the polygonal reconstruction ofF . For r ≤ 0.279, theβ-skeleton ofS is the polygonal recon-struction ofF , and forr ≤ 0.252 the crust ofS is the polygonalreconstruction ofF .
The minimum required sample density that we can show fortheβ-skeleton is somewhat better than the density that we can

134 AMENTA, BERN, AND EPPSTEIN
FIG. 15. Examples from our implementation. Input point sets are on the left, crusts in the middle, andβ-skeletons on the right.
show for the crust. The crust tends to err on the side of addingedges, which can be useful. But theβ-skeleton could be biasedtoward adding edges, at the cost of increasing the required sam-pling density, by tuning the parameterβ.
The main open question is the polygonal reconstruction oftwo-dimensional surfaces inR3. This is an important problemin graphics, and a series of SIGGRAPH papers have presentedeffective practical algorithms [17–20]. Neither of our planargraphs gives a polygonal reconstruction when generalized toR3
in a straightforward way, although it seems possible that eitheridea could be elaborated into a working algorithm.
Many questions remain about two-dimensional reconstruc-tion. There should be results on the quality of the reconstructionof curves with branches and endpoints. There are probably ver-sions of our theorems that do not require smoothness, but onlythat any angles be bounded away from zero by a function ofr . It should be possible to prove something about the qualityof the reconstruction in the presence of small errors in samplepositions and of additive noise.
Better lower bounds would also be interesting. None of ourconstants are tight, and they are far from the lower boundr ≤ 1of Observation 6. The comparison is not really fair here, sinceour graphs also reconstruct some curves with branches andendpoints. An algorithm that produced only reconstructions ofsmooth closed curves could perhaps get by with a larger valueof r .
The work in [6–8] dealt with the polygonal analog of themedial axis, consisting of those edges of the Voronoi diagramof Swhose dual Delaunay edges do not belong to the polygonalreconstruction of the boundary; see Fig. 16. One can think of thisgraph as theanticrust. Our bounds on the quality of the polygonalreconstruction of the boundary should imply something aboutthe quality of the anticrust as a reconstruction of the medialaxis.
Frequently piecewise-linear reconstruction is only a step to-ward smooth reconstruction. Since theLFSgives an upper boundon the curvature, it should be possible to reconstructF withspline rather than line segments in such a way as to improve

THE CRUST AND THEβ-SKELETON 135
FIG. 16. A point set, its crust, and the corresponding polygonal analog of the medial axis.
Theorem 13. This might give a near-minimal representation ofF which does not sacrifice any important features.
REFERENCES
1. D. G. Kirkpatrick and J. D. Radke, A framework for computational mor-phology, inComputational Geometry(G. Toussaint, Ed.), pp. 217–248,North-Holland, Amsterdam, 1988.
2. F. Preparata and M. I. Shamos,Computational Geometry: An Introduction,Springer-Verlag, New York, 1985.
3. H. Edelsbrunner,Algorithms in Combinatorial Geometry, Springer-Verlag,Berlin/Heidelberg, 1987.
4. J. O’Rourke,Computational Geometry inC, Cambridge Univ. Press, Cam-bridge, UK, 1994.
5. J. R. Shewchuk,Triangle.http://www.cs.cmu.edu/ ∼quake/triangle.html .
6. J. Brandt and V. R. Algazi, Continuous skeleton computation by Voronoidiagram,Comput. Vision, Graphics Image Process. 55, 1992, 329–338.
7. G. P. Robinson, A. C. F. Colchester, L. D. Griffin, and D. J. Hawkes,Integrated skeleton and boundary shape representation for medical imageinterpretation,Proc. European Conf. Comput. Vision, 1992, pp. 725–729.
8. R. L. Ogniewicz, Skeleton-space: A multiscale shape description combiningregion and boundary information,Proc. Comput. Vision Pattern Recogni-tion, 1994, pp. 746–751.
9. J. O’Rourke, H. Booth, and R. Washington, Connect-the-dots: A new heuris-tic, Comput. Vision, Graphics Image Process. 39, 1984, 258–266.
10. H. Edelsbrunner, D. G. Kirkpatrick, and R. Seidel, On the shape of a set ofpoints in the plane,IEEE Trans. Inform. Theory29, 1983, 551–559.
11. R. C. Veltkamp, Theγ -neighborhood graph,Comput. Geom. 1, 1992,227–246.
12. D. Attali, R-regular shape reconstruction from unorganized points,Proc.ACM Symp. Comput. Geom. 1997, pp. 248–253.
13. M. Melkemi,A-shapes and their derivatives,Proc. ACM Symp. Comput.Geom. 1997, pp. 367–369.
14. H. Blum, A transformation for extracting new descriptors of shape, inMod-els for the Perception of Speech and Visual Form(W. Walthen-Dunn, Ed.),pp. 362–380, MIT Press, Boston, 1967.
15. J. Ruppert, A new and simple algorithm for quality two-dimensional meshgeneration,Proc. ACM-SIAM Symp. Discrete Algorithms, 1993, pp. 83–92.
16. L. P. Chew, Guaranteed-quality mesh generation for curved surfaces,Proc.ACM Symp. Comput. Geom. 1993, pp. 274–280.
17. H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, and W. Stuetzle, Sur-face reconstruction from unorganized points,Proc. SIGGRAPH, 1992,pp. 71–78.
18. G. Turk and M. Levoy, Zippered polygon meshes from range images,Proc.SIGGRAPH, 1994, pp. 311–318.
19. C. L. Bajaj, F. Bernadini, and G. Xu, Automatic reconstruction of sur-faces and scalar fields from 3D scans,Proc. SIGGRAPH, 1995, pp. 109–118.
20. B. Curless and M. Levoy, A volumetric method for building complex modelsfrom range images,Proc. SIGGRAPH, 1996, pp. 303–312.