Embed Size (px)
Citation preview

The accelerator injection chain of the electron storagering EUTERPEde Leeuw, R.W.
DOI:10.6100/IR468074
Published: 01/01/1996
Document VersionPublisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers)
Please check the document version of this publication:
• A submitted manuscript is the author's version of the article upon submission and before peer-review. There can be important differencesbetween the submitted version and the official published version of record. People interested in the research are advised to contact theauthor for the final version of the publication, or visit the DOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and page numbers.
Link to publication
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal ?
Take down policyIf you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediatelyand investigate your claim.
Download date: 26. Aug. 2018


The Accelerator lnjection Chain
of the
Electron Storage Ring EUTERPE

Copyright @1996 R.W. de Leeuw Fotografie: Stafgroep Reproductie en Fotografie, TUE Omslagontwerp: Ben Mobach, TUE Druk: Universiteitsdrukkerij, TUE
Leeuw, Rard Willem de
The accelerator injection chain of the electron storage ring EUTERPE/ Rard Willem de Leeuw. - Eindhoven: Eindhoven University of Technology Proefschrift Eindhoven. - Met lit. opg. ISBN 90-386-0368-1

The Accelerator Injection Chain
of the
Electron Storage Ring EUTERPE
PROEFSCHRIFT
ter verkrijging van de graad van doctor aan de Technische Universiteit Eindhoven,
op gezag van de Rector Magnificus, prof.dr. M. Rem, voor een commissie aangewezen door het College van Dekanen in het openbaar te verdedigen op
donderdag 31 oktober om 16.00 uur
door
Rard vVillem de Leeuw
geboren te Nijmegen

Dit proefschrift is goedgekeurd door de promotoren
prof.dr.ir. H.L. Hagedoorn en prof.dr. H. Klein
en de copromotor
dr.ir. C.J. Timmermans.

Voor de Leeuwen Aan Irene

Cover illustration: The photograph shows the accelerating structure of the Racetrack Microtron Eindhoven. The curve represents the measured electric field profile in this nine cell accelerating structure.

Contents
1 The accelerator injection chain of the electron storage ring EU-TERPE 1 1.1 The electron storage ring EUTERPE 1 1.2 The accelerator injection chain . 3
1.2.l The linear accelerator. . . . . 3 1.2.2 The racetrack rnicrotron . . . 5 1.2.3 Radio frequency high power set-up 8 1.2.4 Electron bearn transport lines 9 1.2.5 Control and safeguarding . 10
1.3 Scope of this thesis . . . . . . . . 12
2 Linear accelerators 1 7 2.1 Radio frequency linear electron accelerators and microtrons . 17
2.1.1 Radio frequency linear electron accelerators 17 2.1.2 Microtrons . . . . . . . . . . . 19
2.2 Parameters for a standing wave linac . . . . . . . 20 2.3 The travelling wave injector linac . . . . . . . . . 21
2.3.l Basic parameters of a travelling wave linac 22 2.3.2 Power flow and electric field strength in the injector linac . 23
2.4 Electric field shape in the linac . . . . . 26 2.4.1 Reflection at a single diaphragm . 26 2.4.2 The periodic structure . 30 2.4.3 Fourier space harmonies . 32
3 A model for coupled cavity linacs 39 3.1 Infinitely long periodic chains of coupled resonators . . . . . . . . . 39
3.1.1 Singly periodic chain with nearest neighbour coupling . . . . 39 3.1.2 Bi-periodic chain including next nearest neighbour coupling 42
3.2 Terminated periodic chains of coupled resonators . . . . . . . . . . 43 3.2.1 Singly periodic chain with nearest neighbour coupling . . . . 43 3.2.2 Bi-periodic chain including next nearest neighbour coupling 45
3.3 Non ideal structures: perturbation calculation . . . . . . . 4 7 3.3.l Perturbation of the frequencies of the chain modes. 47
vii

viii
3.3.2 3.3.3
Perturbation of the field patterns of the chain modes Perturbation analysis for the fields in the 7r /2-mode .
Contents
48 49
4 The accelerating cavity of the Racetra:ck Microtron Eindhoven 53 4.1 Introduction . . . . . . . . . . . . . 53
4.1. l Choice of type of structure . 53 4.1.2 Design strategy . 54
4.2 Numerical design . . . . 55 4.2.1 Superfish design . 55 4.2.2 Mafia design . . . 57 4.2.3 Combining Superfish and Mafia 58
4.3 Setting tolerances . . . . . . . . . . . . 59 4.3.1 Multipacting . . . . . . . . . . 60 4.3.2 Determination of the coupling constant 61 4.3.3 Determination of the required tuning accuracies 62
4.4 Fabrica.tion of the ca.vity 64 4.5 Tuning of the cavity . 66 4.6 Measured parameters . 69 4. 7 Concluding remarks . . 72
5 The RF power set-up of the linac-racetrack microtron combination 77 5.1 Introduction . . . . . . . . . . . . . 77 5.2 Frequency stability of a. magnetron 78
5.2.1 Measurement set-up . . . . 78 5.2.2 Results . . . . . . . . . . . . 81
5.3 Injection locking of two EEV M5125 magnetrons. 81 5.3.1 Injection locking conditions . . . . . . . . 82 5.3.2 Injection locking experiment . . . . . . . . 83
5.4 The RF power set-up of the linac-racetrack microtron combination . 86 5.5 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
6 Particle dynamics in radio frequency linear accelerators 6.1 Introduction .................. .
6.1.1 Basic concepts ............. . 6.2 A Hamiltonian description of particle motion .
6.2.1 The vector potential . 6.2.2 The basic Hamiltonian . . . . . . . . . 6.2.3 Central solutions . . . . . . . . . . . . 6.2.4 Phase focusing and magnetic focusing . 6.2.5 Focusing due to oscillating terms
6.3 Matrix representation . . . . . . . . . . . 6.3.1 Phase focusing ......... . 6.3.2 Focusing due to oscillating terms
91 91 92 93 93 94 96 97 99
. 100
. 100
. 102

Contents
6.3.3 Combining the different focusing terms 6.4 Transversal focusing by the RTME cavity . . .
7 Matching the linac to the racetrack microtron 7 .1 Introduction . . . . . . . . . . . . . . . . . . . . 7.2 Characteristics of the 10 MeV linear accelerator
7 .2.1 Longitudinal characteristics . . . . . . . 7.3 The acceptance of the Racetrack Microtron Eindhoven 7.4 A doubly achromatic bending section ..... .
7.4.1 Demands ................ . 7.4.2 The doubly achromatic bending section .
7.5 Matching the linac to the racetrack microtron 7.6 Concluding remarks .............. .
8 The beam transport line between RTME and EUTERPE 8.1 Introduction .......... . 8.2 The last bend in the microtron 8.3 Dispersion matching . . . . . . 8.4 The doubly achrornatic bending system . 8.5 The total beam transport system 8.6 Concluding rernarks . . . . . . . .
9 Concluding remarks
A Parameters for a standing wave linac A.l Free running resonator ....... . A.2 Beam loaded, generator coupled resonator
Summary
Publications
Samenvatting
Nawoord
Curriculum Vitae
ix
102 103
107 107 108 109 109 111
. 111 111 115 117
121 121
. 122
. 122
. 124
. 126
. 128
131
133 . 133 . 134
141
143
145
147
149

x Contents

1 The accelerator injection chain of the electron storage ring EUTERPE
This study was performeä in the context of the EUTERPE project. Therefore, a general outline of the EUTERPE project is presented first. The accelerator injection chain of the ring, which consists of a linear accelerator followed by a racetrack microtron, is described in detail. For acceleration the two accelerators have to operate synchronously. This means that both the RF power set-up and the electron beam transport between the two machines have to fulfil a number of demands. These demands wilt be described. Finally) an outline of the present study as described in this thesis is given.
1.1 The electron storage ring EUTERPE
EUTERPE (Eindhoven University of TEchnology Ring for Protons and Electrons) is a university funded project for the realisation of a small storage ring 1 [l]. In the mid-eighties the project was started as a post-accelerator for the 3 MeV proton cyclotron ILEC (Isochronous Low Energy Cyclotron) [2] [3]. The ring was to be used explicitly for beam dynamic studies. Soon, it was rea1ised that the equivalent electron energy in the suggested proton ring was sufficiently high for experiments and applications using synchrotron radiation, which would allow extension of the analysis activitiesin the Cyclotron Laboratory [4]. Now, theobjectiveof acceleration of protons has become subordinate to the promising possibilities for an electron storage ring.
The purpose of the electron storage ring is threefold [5]. In the first place synchrotron radiation will be generated. Secondly, beam dynamic studies with and without so-called insertion devices will be performed. Thirdly, the ring will be used as basis for technology development. For a large part, studies on design, experiments and theory on orbit dynamics, magnets and radio frequency (RF) systems for accelera.tors, data-acquisition, system controls, etc. are carried out by students.
For the application of synchrotron radiation the project has been divided into two phases. In the first phase the synchrotron radiation in a broad wavelength region, from infrared to ultra-violet, will be provided by the regular dipole magnets.
1 References at the end of each chapter
1

2 The accelerator injection chain of the electron storage ring EUTERPE
Electrostotic Septum
Euterpe 400 MeV Bol
~=~ Linac 5 MeV
Figure 1.1: Layout of EUTERPE.
In the second phase a wiggler magnet and various undulators (insertion devices) will be used. Synchrotron radiation in the soft X-ray region and a bright, quasimonochromatic photon beam will be provided. The synchrotron radiation generated in the ring can be used for studies in photochemistry, biophysics, surface and condensed matter science, and molecular and atomie physics.
In a later stage a by-pass system for advanced free electron laser studies is foreseen. This by-pass provides a long straight section of 7.8 m, which is suitable for insertion of new devices such as undulators that cannot be accommodated in a normal straight section of the ring due to their lengths or small apertures [6].

The accelerator chain 3
EUTERPE, Fig. 1.1, will have a circumference of about 40 rn and will be located in the existing experiment hall of the Cyclotron Laboratory at Eindhoven University of Technology (TUE) [6] [7]. The ring is designed to store electrons at an energy of 400 MeV and a beam current of more than 100 mA.Fora current of 100 mA about 1011 electrons have to be accumulated in the ring. The beam guiding system consists of 12 dipole magnets, 32 quadrupole magnets and 16 sextupole magnets. The 12 dipole rnagnets will provide the synchrotron radiation in the first phase; in the second phase the insertion devices will be located in the relatively large straight sections. The energy loss due to synchrotron radiation (2.3 keV /turn at 400 MeV) will be compensated for by a 45 MHz capacitively loaded quarter wavelength resonator, which also accelerates the electrons from the injection energy of 7.5 MeV to the final energy of 400 MeV [8].
1.2 The accelerator injection chain
EUTERPE will be injected from an accelerator injection chain that consists of a 10 MeV travelling wave linear accelerator (linac) followed by a 10 75 MeV racetrack microtron. Since the two accelerators have to operate synchronously, a number of parameters of both machines has to be dosely related. Especially phase and frequency of both magnetrons, which power the two accelerating structures, have to be controlled carefully. Also, the electron beam transport from linac to racetrack microtron has to satisfy a number of demands. After passage through the microtron, the electron beam is transported further via a second beam transport line to the injection spot of the ring.
1.2.1 The linear accelerator The 10 MeV travelling wave linear accelerator is an 'old' medica] linac (type M.E.L. SL75/10). At the Catharina hospita! in Eindhoven it has been used for cancer treatment by means of X-ray and electron beam therapy. After the machine was written off, it was donated to the TUE. The linac has been completely revised and is now suited for electron beam manipulation [9] {10].
The components of the linac are depicted in fig. 1.2. A pulse forming network is charged via a transformer and discharged with a thyratron via a diode stack. The discharge is initiated by the trigger pulse generator. The high-voltage pulse generated ( 40 k V) is delivered simultaneously to the magnetron and the electron gun. The magnetron produces a high power RF pulse (2 MW, 3 GHz), which travels down the rectangular pressurized waveguide to the accelerator. This RF wave is coupled into the circular disk-loaded travelling waveguide via a mode transformer. The disks with circular irises in the middle provide the longitudinal electric field for the acceleration of the electrons and slow down the electromagnetic wave, so that its phase velocity matches the velocity of the electrons [11]. These electrons are generated in the electron gun, where the same high voltage pulse that is fed to

4 The accelerator injection chain of the electron storage ring EUTERPE
i 1 i - '· i i
i '·i i i !°'·, 1 i i i i i l ·'.J/ i i
8 9 7 10 11 4 12 13
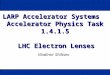
Figure 1.2: The linear accelerator: l) trigger pulse generator, 2) pulse forming network, 3) magnetron, 4) RF window, 5) isolator, 6) group offocusing coils, 7) steering coils, 8) electron gun, 9) focusing coil, 10) group of focusing coils, 11) RF load, 12) insulating disk, 13) Faraday cup.
the magnetron is applied to a spiralled cathode wire. Once the electrons enter the waveguide they are accelerated by the electromagnetic wave. By varying the distance between the disks, the phase velocity of the electromagnetic wave is matched to the increasing velocity of the electrons. After a certain distance the electrons are highly relativistic and the accelerating structure becomes periodic. At the end of the linac the remainder of the EM wave is separated frorn the electrons via a second mode transformer and is dumped into the load.
Due to the interaction with the electrornagnetic wave, the electrons will be longitudinally focused in bunches that are accelerated just ahead of the crest of the wave. Within these bunches the electrons perform the so-called synchrotron oscillations, whereas the bunches themselves remain centred around the synchronous phase. Due to this longitudinal focusing, the motion in transverse direction is inherently unstable. Therefore, the electrons have to be focused in the transverse direction by .rneans of solenoids. Steering coils centre the beam in the waveguide. Table 1.1 lists some parameters of the linac.

The accelerator mjec1tion chain
Table 1.1: Parameters of the linac.
average gradient (MV /m) electron energy (Me V) FWHM energy spread(%) macro pulse current (mA) operating frequency (MHz) pulse repetition rate (Hz) pulse duration (µs) filling time (µs)
1.2.2 The racetrack microtron
4.4 10
3.5 50
2998 50, 150, 300
1.7 0.5
5
The racetrack microtron is a compact recirculating type of bunched electron beam accelerator [12]. lts main components are two 180 degree bending magnets and a resonant type of accelerating structure or cavity. Due to the recirculating nature of the racetrack microtron, the electrons, remain captured in bunches with a length much smaller than the wavelength of the cavity, at their passage through the machine. This principle of phase stability provides a stable sharply pulsed output beam with a small relative energy spread.
Fig. 1.3 depicts the schematic layout of the Racetrack Microtron Eindhoven [13]. The electron beam from the linac is injected at an energy of approximately 10 Me V. After the first bend in the right bending magnet, the electrons pass the cavity for the first time. During this passage the gain in kinetic energy is 5 Me V. Due to the higher energy, the first bending radius in the left bending magnet is larger and the particles enter the mid-vacuum chamber. In this mid-vacuum chamber the position of the individual orbits is measured and corrected [13] [14] [15]. The electrons are bent again in the right bending magnet, and so on. After 13 passages through the cavity and a total energy gain of 65 MeV, the electron beam is extracted. For extraction of the electrons, the field profile of the last bend has been altered from a two-sector profile to a three-sector profile, which lowers the bending angle by approximately 6 degrees, sufficient for easy extraction.
To obtain synchronous acceleration, there has to be a well-defined relation between the cavity resonant frequency, f0 , the energy gain per cavity passage, Ec, and the magnetic induction, B, in the bending magnets:
B _ 27rfoEc - ec2 IJ '
(1.1)
where c is the speed of light, e the elementary charge, and IJ a mode number which represents the increase of the length between the successive orbits in cavity wavelengths. The energy gain per cavity passage is related to the injection energy, Einj,

6 The accelerator injection chain of the electron storage ring EUTERPE
MEOIAN PLANE VIEW
t 1 1 1 0 10 20 30 cm
_Jl~m~-~
' bending mognets
~-~ fRONT VIEW
centrol vocuum lonk
Figure 1.3: The Racetrack Microtron Eindhoven.
by the following equation:
(1.2)
L is the free field distance between the bending magnets on the cavity axis and µ is a second mode number, which represents the length of the first orbit in cavity

The accelerator injection chain
Table 1.2: Parameters of the Racetrack Microtron Eindhoven.
<A~•.uv·~i µ mode number v kinetic energy at injection (MeV) kinetic energy at extraction (Me V) energy gain per turn (Me V) number of cavity passages orbit separation (mm) drift length at cavity axis (m) average macro pulse current (mA) horizontal acceptance (mm·mrad) transverse acceptance (mm·mrad) longitudinal acceptance ( deg· Me V) energy acceptance (%)
magnets magnetic field (T) [sector 1/2] gap (mm) [sector 1/2] sector angle (mrad) tilt angle (mrad)
accelerating structure resonant frequency (MHz) length (m) accelerating potential (MV) macro pulse duration (µs)
2 9.90 75.0 5.00
13 60.6
0.999 7.5 40 10
1.8 ±0.5
0.51/0.60 20/17
785 78
2998 0.45 5.06
3.6
wavelengths. The final energy of the electrons, Ef? is given by:
where Nc is the number of cavity passages of the electrons.
7
(1.3)
Bending magnets In a 'classical' racetrack microtron the bending magnets are homogeneous sector magnets and provide 180 degree bends for the successive orbits. The disadvantage of this relatively simple design principle is that the homogeneity of the magnets has to be very good since the electron focusing due to the cavity and field clamps in this type of machine is very weak. By using an azimuthally varying field profile the focusing forces can be increased and the microtron is less sensitive to magnetic field imperfections and alignment errors.

8 The accelerator injection chain of the electron storage ring EUTERPE
For optimal focusing properties the bending magnets of the Racetrack Microtron Eindhoven contain two distinct sectors with different magnetic field strengths and reversed field clamps. This kind of magnet provides focusing forces at three edges: at the entrance of the magnet, at the exit of the magnet and at the transition of the sector boundary. With these two sector magnets, it is no longer possible to obtain a pure 180 degree bend for the electrons. Therefore, the bending magnets have to be rotated in their median planes, resulting in closed orbits and isochronous acceleration.
Accelerating structure The accelerating structure of the racetrack microtron is a 17-cell bi-periodic standing wave on-axis coupled cavity made out of oxygenfree high conductivity copper [16] [17] [18]. It consists of 9 capacitively loaded accelerating cells coupled by 8 pancake-like coupling cells. The structure operates at a resonant frequency, f 0 , of 2998 MHz in the 7r /2-mode and provides an energy gain of 5 Me V per passage. The resonant frequency of this cavity is the same as the frequency at which the linac operates. In the 7r /2-mode the energy is completely stored in the large accelerating cells, whereas the coupling cells are empty and only provide the coupling between the different cells by means of coupling slots in the common walls. This mode appears to be the most stable mode of operation, since the field levels and resonant frequencies are the least aff ected by manufacturing imperfections [19] [20].
Table 1.2 lists some important parameters of the Racetrack Microtron Eindhoven and its main components.
1.2.3 Radio frequency high power set-up The accelerating structures of both the linear accelerator and the racetrack microtron are each powered individually by a high power magnetron. The RF power generated by the identical magnetrons is partly dissipated in the two accelerating structures. The rest of the power can be used for acceleration of the electrons. See table 1.3.
The electron bunches that are formed and accelerated in the linear accelerator have to be injected at a phase of approximately 4 degrees for further acceleration in the racetrack microtron. Therefore there has to be a well-defined frequency and phase relation between the two magnetrons. They not only have to oscillate at the same frequency, hut also the phase difference has to be kept constant. Because the magnetron is a free running oscillator, not an amplifier, this relation has to be obtained at the high power level.
We assure this frequency and phase relation by feeding part of the power from the microtron magnetron with the longer pulse duration into the magnetron that powers the linac. By injecting this power before the second magnetron is triggered, it is forced to loek into this pre-injected frequency and phase.

The accelerator
Table 1.3: Parameters of the radio frequency high power set-up.
magnetron peak power magnetron (MW) frequency (MHz) repetition rate (Hz)
linac power dissipated in structure (MW) power used for acceleration (MW) macro pulse duration (µs) filling time of structure (µs) delay w.r.t. magnetron of microtron (µs)
racetrack microtron power dissipated in structure (MW) power delivered to second magnetron (MW) power used for acceleration (MW) macro pulse duration (µs)
time of structure
2.2 2998.3
50, 150, 300
1.00 0.55
1.7 0.47
1.5
0.91 0.20 0.50 3.6
0.46
9
The linac has to deliver an electron beam with a nominal energy of 9.96 Me V. The output energy of the linac can be adjusted by varying the loading of the accelerating structure through adjustment of the current emitted by the electron gun. The energy is fixed by optimising the current through a slit positioned after the first bending magnet (see next section). The accelerating potential of the accelerating structure of the racetrack microtron is regulated by controlling the amount of power delivered to this structure. This is done with an adjustable high power attenuator in the waveguide between magnetron and structure. In addition, a phase shifter is incorporated for phase control.
1.2.4 Electron beam transport lines Two transport. lines provide the electron beam transport bet.ween the three accelerators. The first transport line guides the electron beam from the linear accelerator to the injection spot of the racetrack microtron (fig. 1.4). This transport line not only guides the beam from one machine to the other, but also matches the six-dimensional emittance of the linac beam to the acceptance of the racetrack microtron. The total beam transport line of approximately 2 m consists of a quadrupole triplet, Qi - Q3 ,
followed by a bending section, M1 - M4 , and finally a quadrupole doublet, Qs Q6 •
The doubly achromatic bending section is antisymmetric and consists of four identical 50 degree bending magnets [21]. In the bending plane it yields a one to

10 The accelerator chain of the electron EUTERPE
• linac
microtron
Figure 1.4: Layout of the 10 MeV transport line between linac and RTME.
one transformation, whereas in the other plane it is a pure drift. In longitudinal phase space it counteracts the dispersive action of the first bend in the racetrack microtron [22}. In the focus of the first bending magnet, a slit system is placed that limits the energy spread of the ongoing beam to approximately 1.0% (FWHM), which is the energy acceptance of the racetrack microtron [13].
The second transport line guides the beam from the extraction spot of the racetrack microtron to the injection spot of EUTERPE. Since the longitudinal phase space acceptance of the ring is large, the transport line only matches the 4-dimensional transverse emittance of the microtron beam to the transverse acceptance of the ring. The transport line consists of two doubly achromatic bending sections and two quadrupole doublets [23] (fig. 1.5).
For easy extraction, the last bend in the racetrack microtron has been designed to be less than 180 degrees. This is realised in a three-sector dipole field, instead of the normal two-sector dipole field for the other bends in the microtron [23]. The combination of the last bend in the microtron and the first bending section in the transport line, M 1 - M2, farms a double achromat. Via. the second achromatic bending section the beam is bent towa.rds the ring.
The two bending sections are connected via. a qua.drupole doublet, Q2 - Qg. Another quadrupole doublet, Q7-Q8 , connects the second bending section, Mg-M4 ,
to the ring and matches the beam to the a.ccepta.nce of the ring. The rema.ining angle between the transport line and the ring is 11.5 degrees. This remaining bending is accomplished by a magnetic septum and an electrostatic septum [24].
1.2.5 Control and safeguarding The injection chain of EUTERPE is controlled via a PhyDAS system [26] and guarded by a programmable logic controller (PLC) [25]. The same PhyDAS system is also used for some experiments as a data-acquisition system.

The accelerator chain 11
Figure 1.5: Layout of the 75 MeV transport line between RTME and EUTERPE.
The PhyDAS system consists of a VME part and a Phybus part. The VME part constitutes the actual computer on which the software for the control of the injection chain runs. The communication with the accelerator hardware is clone via Phybus, which contains several experiment interfaces, such as stepper motor interfaces and two RS232 interfaces. The RS232 intedaces connect two galvanicly separated analogue busses with the Phybus.
To obtain the desired stability, e.g. !:l.I / I ::; 10-4 for the currents through the focusing and steering magnets, and to avoid that the Phydas system is constantly occupied with regulating tasks during operation of the accelerators, the power supplies are set by a single write statement to the appropriate DAC in the analogue bus. These values are used as set points for hardware stabilisation circuits that control the output currents of the power supplies by measuring the potential across a temperature controlled shunt resistor [26]. These external circuits have the big advantage that the PhyDAS system can be used for data-acquisition in experiments during operation.
The programmable logic controller (PLC) is used to put the different parts of the accelerators into operation in a predefined sequence and for safeguarding. With a complex machine as an accelerator, it is important to make sure that it is not

12 The accelerator injection chain of the electron storage ring EUTERPE
possible to damage the machine by improper handling of the operator. Often a number of conditions have to be fulfilled before a certain part of the machine, e.g. the electron gun, can be put into operation. For example current limits, water flow and vacuum are all controlled by the PLC. If not all the conditions for safe operation are fulfilled or in case of a fault indication, the machine (or part of the machine) is switched off. Also the room safeguarding is taken care of by the PLC. The current status of the accelerators, as monitored by the PLC, is displayed on the screen of a personal computer via the visualisation program Intouch.
By dividing the control and safeguarding over a PhyDAS system and a PLC, it is possible to obtain precise, reliable and safe operation of the complex set-up of the accelerator injection chain of the electron storage ring EUTERPE.
1.3 Scope of this thesis
This thesis deals with the injection chain of the electron storage ring EUTERPE. It will focus on the coupling between the racetrack microtron and its pre-injector, the 10 MeV linear accelerator. This coupling consists of two parts.
At first there is the coupling of the RF power sources and the individual accelerating structures. As stated before there has to be a well defined frequency and phase relation between the two magnetrons, that individually power the accelerating structures of the linac and the racetrack microtron. The RF aspects of the injection chain will be described in chapters 2 5.
Secondly there is the coupling of the electron beam of the linac into the racetrack microtron: the six-dimensional emittance of the linac beam is matched to the acceptance of the racetrack microtron. Chapters 6 - 9 focus on the electron optical aspects of the coupling between the two accelerators.
The electron optical design of the racetrack microtron has been reported by Webers [13] and will not be treated in detail in this thesis. However, a lot of his results will be used in the present work.
Chapter 2 starts with a brief historica! review of the history of linear radio frequency accelerators and (racetrack) microtrons. Then an introduction to the various terms, parameters and principles associated with the radio frequency engineering of particle accelerators will be given. Both standing wave accelerating structures, e.g. the accelerating structure of the racetrack microtron and travelling wave structures, e.g. the 10 MeV injector linear accelerator, will be discussed. Also, a model for the power flow and the electric field strength and shape along the 10 Me V linear accelerator will be presented in this chapter.
In chapter 3 a model for standing wave coupled cavity linacs is presented. An individual resonator or cavity can be modelled by a single RLC circuit and a structure of coupled resonators can be modelled by a series of coupled RLC circuits. This model proves to be a powerful tool for the analysis of the behaviour of standing wave coupled cavity linacs. Both infinitely long and terminated structures will be treated,

References 13
as well as singly periodic (all the resonators being equal) and bi-periodic (the total structure consists of two types of resonators that are placed alternatingly) structures. A perturbation calculation for the frequencies and the fields in the mode of operation, the n: /2-mode, will be presented.
Chapter 4 is meant to serve as a cookery book for the design of a coupled cavity linac. The recipe is given on the basis of the design and construction of the accelerating structure of the racetrack microtron. The numerical design with computer codes and the fabrication and tuning process will be treated in some detail. The chapter ends with a presentation of the measured figures of merit regarding the accelerating structure that has been built at the Central Design and Engineering Facilities of Eindhoven University of Technology.
In chapter 5 one of the specialities of the accelerator injection chain is treated: the high power radio frequency layout. Two magnetrons individually power the accelerating structures of the linac and the racetrack microtron, but by injection locking they are forced to operate synchronously. Properties of the magnetrons and the process of injection locking of the two magnetrons will be described.
Chapter 6 starts with an introduction to the basic topics of charged particle motion. Then a description of the particle motion in radio frequency linear accelerators is given. The particle dynamical behaviour is calculated by means of Hamiltonian mechanics. This description is applied to the standing wave structure of the racetrack microtron and is compared with results from literature and numerical simulations.
In chapter 7 a description of the electron optical properties of the travelling wave linear accelerator at 10 Me V is given. The characteristics of the linac are partly obtained via measurements, e.g. energy spread, and partly via simulations with a Monte Carlo computer code, e.g. the particle distribution in the longitudinal phase plane. The transverse and longitudinal acceptance of the racetrack microtron are given just before the first passage through the cavity. Then descriptions are given of the electron beam transport from the linac to the racetrack microtron and of how the six-dimensional emittance of the electron beam from the linac is matched to the acceptance of the racetrack microtron.
In chapter 8 the extraction from the racetrack microtron and the electron beam transport to EUTERPE is described.
Concluding remarks are presented in chapter 9.
References
[1] Theuws W.H.C., History and status quo of EUTERPE, Internal report VDF/NK 94-47, Eindhoven University of Technology (1994).
[2] Heide J.A. van der, Kleeven W.J.G.M., Regt R.J.L.J. de, Magendans P., The Eindhoven minicyclotron !LEG, Proc. of the 1989 Int. Conf. on Cyclotrons and their Applications, Berlin (1989) 121-124.

14 The accelerator injection chain of the electron storage ring EUTERPE
[3] Botman J.I.M. , Hagedoorn H.L., General purpose storage ring as post accelerator for the !LEG cyclotron, Proc. of the 1989 Int. Conf. on Cyclotrons and their Applications, Berlin (1989) 43-46.
[4] Botman J.I.M., Mutsaers P.H.A" Hagedoorn H.L" Voigt M.J.A. de, EUTERPE a small electron storage ring for XRF, Nucl. Instr. and Meth. B49 (1990) 89-93.
[5] Botman J.I.M., Xi B., Timmermans C.J., Hagedoorn H.L., The EUTERPE facility, Rev. of Sci. lnstr. vol. 63, no. 1 (1992) 1569-1570.
[6] Xi B., Design studies for the electron storage ring EUTERPE, Ph.D. Thesis, Eindhoven University of Technology (1995).
[7] Xi B., Botman J.I.M., Timmermans C.J., Hagedoorn H.L., Design study of the storage ring EUTERPE, Nucl. Instr. and Meth .. B68 (1992) 101-104.
[8] Heide J.A. van der, Rubingh M., Kleeven W.J.G.M., Botman J.I.M., Timmermans C.J., Hagedoorn H.L., Calculations and model measurements for the EUTERPE accelerating cavity, Proc. Part. Acc. Conf., Washington D.C. (1993) 1072-1074.
[9] Wijs M.C.J. de, The 10 Me V linac, Internal report VDF /NK 95-25 M.Sc. Thesis, Eindhoven University of Technology (1995).
[10] Hammen A.F.J" Internal report, M.Sc. Thesis, Eindhoven University of Technology (1996).
[11] Pruiksma J.P., Electromagnetic fields in a periodically disk loaded circular waveguide, Internal report VDF /NK 96-12, M.Sc. Thesis, Eindhoven University of Technology (1996).
[12] Delhez, J.L., The azimuthally varying field racetrack microtron, Ph.D. Thesis, Eindhoven University of Technology (1994).
[13] Webers G.A.,Design of an electron-optical system fora 15 Me V racetrack microtron, Ph.D. Thesis, Eindhoven University of Technology (1994).
[14] Theuws W.H.C., Leeuw R.W. de, Webers G.A., Timmermans C.J., Botman J.l.M., Hagedoorn H.L" Beam positioning and monitoring in the racetrack microtron Eindhoven, Proc. Part. Acc. Conf" Dallas (1995) 2738-2740.
[15] Theuws W.H.C" Beam position monitoring and beam positioning in the racetrack microtron Eindhoven, lnternal report VDF /NK 94-36, M.Sc. Thesis, Eindhoven University of Technology (1994).
[16] Coppens J .E., Design study for the accelerating cavity of the racetrack microtron Eindhoven, Internal report VDF/NK 94-18, M.Sc. Thesis, Eindhoven University of Technology (1994).
[17] Leeuw R.W. de, Coppens J.E., Kleeven W.J.G.M" Timmermans C.J., Botman J.LM" Design study for the accelerating cavity of the racetrack microtron Eindhoven, Proc. Eur. Part. Acc. Conf. London (1994) 2092-2094.

References 15
[18] Leeuw R.W. de, Coppens J.E., Drouen T., Timmermans C.J., Botman J.I.M., Hagedoorn H.L., Brinkgreve P., The accelerating cavity of the racetrack microtron Eindhoven, Proc. Eur. Part. Acc. Conf. Barcelona (1996).
[19] Nagle D.E., Knapp E.A., Knapp B.C., Coupled resonator model for standing wave accelerator tanks, Rev. of Sci. Instr., vol. 38, (1967) 1583-1587.
[20] Knapp E.A., Standing wave high energy linear accelerator structures, Rev. of Sci. Instr. vol. 39, (1968) 979-991.
[21] Leeuw R.W. de, Botman J.I.M., Maanen I.F. van, Timmermans C.J., Webers G.A., Hagedoorn H.L., A 10 Me V injection beam transport line fora racetrack microtron, Proc. Eur. Part. Acc. Conf. London (1994) 2417-2419.
[22] Leeuw R.W. de, Wijs M.C.J. de, Webers G.A., Hagedoorn H.L., Botman J.I.M., Timmermans C.J., Matching the emittance of a linac to the acceptance of a racetrack microtron Proc. Part. Acc. Conf., Dallas (1995) 1882-1884.
[23] Leeuw R.W. de, Greevenbroek H.R.M. van, Botman J.I.M., Webers G.A., Timmermans C.J., Hagedoorn H.L., The extraction orbit and the extraction beam transport line fora 75 Me V racetrack microtron Proc. Part. Acc. Conf., Dallas (1995) 1885-1887.
[24] Xi B., Botman J.I.M., Timmermans C.J., Hagedoorn H.L., Sweep A.J.W., Webers G.A., Injection requirements for the EUTERPE storage ring, Proc. Eur. Part. Acc. Conf. Berlin (1992) 1446-1448.
[25] Graus J.M.H., Bedieningsinstructie LINAC 10, lnternal report VDF /NK 94-47, Eindhoven University of Technology (1995), in dutch.
[26] Mutsaers P.H.A., Design and realisation of the Eindhoven scanning proton microprobe, Ph.D. Thesis, Eindhoven University of Technology (1995).

16 The accelerator injection chain of the electron storage ring EUTERPE

2 Linear accelerators
An introduction to radio fr·equency linear accelerators is given. A description of some relevant historica[ developments Jor both standing and travelling wave linear accelerators, microtrons and their radio frequency power sources is presented. The power flow> electric field strength and shape in the 10 Me V travelling wave linear accelerator are calculated. The basic parameters of standing wave linear accelerators are described in an appendix to this thesis.
2.1 Radio frequency linear electron accelerators and microtrons
This section briefty describes some relevant developments in the history of radio frequency linear electron accelerators and microtrons and their radio frequency power sources.
2.1.1 Radio frequency linear electron accelerators The history of operational radio frequency linear accelerators (linacs) started as early as 1928 when Wideröe reported on the first working drift tube lina.c. It consisted of an open structure where the tubes were connected alternatingly toa source of high frequency waves (1 MHz) and to ground, see fig. 2.1. lt was capable of delivering 50 keV potassium or sodium ions [l]. Five yea.rs later (1933) the first 90 keV tra.velling wavefront electron linac, tha.t already had been proposed by Ising in 1925, was built and described by Beams and Snoddy. Within two years this machine was adapted and upgraded to produce an output energy of 2.5 Me V.
ion source
Figure 2.1: Schematic representation of Wideroë's drift tube linac.
17

18 Linear accelerators
After these initial successes for a number of years no improvements were reported. The drift tube linacs employed at that time were not capable to accelerate protons and alpha's, which could be used for nuclear experiments, to sufficiently high energies, since no high frequency high power sources were available. These linacs were therefore abandoned in favour of the cyclotron. The travelling wavefront linac is a complex type of accelerator, which needs adequate equipment to observe propagation characteristics and the frequency response of the system. This equipment was not available at that time [2].
During World War II major advances were made in the development of multikilowatt high frequency magnetrons under the pressure for radar protection of Great Britain [3]. At the same time the first power klystrons were built for use as a signal generator. By the end of WWII it was clear that with these new power sources linear accelerators could be designed for useful operation for nuclear physics.
In order to efficiently generate accelerating fields at high frequencies it is necessary to close the structure to avoid extreme losses due to radiation. Possible options are the closed drift tube linac, travelling and standing wave linacs. The first type is mainly used for the acceleration of ions and will not be considered here.
In a travelling wave linac the accelerating electric field is generated by launching an electromagnetic wave into a disk loaded waveguide. Short after WWII at Stanford elaborate studies on the behaviour of disk loaded travelling waveguides were performed. In 1947 the first linac, the MARK I, had an output energy of 4.5 MeV at a length of 2.8 m. A 3 GHz 0.9 MW peak power magnetron served as power source.
The magnetron is a self excited oscillator with limited stability. To obtain high energetic electrons, which means synchronised acceleration over large distances, the development of the more stable klystron amplifier seemed inevitable. In 1949 at Stanford the first high power klystron was put into operation. The MARK 1 was succeeded by the MARK II and III, the last one being 63 meters long and delivering an output energy of 600 Me V.
The first high energy standing wave linac was developed at the Massachusetts Institute of Technology (M.l.T.) in 1947. A research project, with the aim of applying microwave methods to the problem of accelerating electrons [4], was meant to serve as a proof of principle: is it possible to build an accelerator of great length capable of producing very high energy electrons? The accelerator itself was 7 meters long and consisted of 21 individual standing wave sections operating in the 7r-mode powered by 21 magnetrons. The magnetrons were stabilised by the loading of the high quality accelerating sections and forced to loek in phase and frequency onto each other by pre-injecting part of the power of a master magnetron (-30 dB) into the other magnetrons (the slaves). The linac accelerated 2 MeV electrons delivered by a VandeGraaff generator to a final energy of 18 MeV, thereby proving the principle. Due to the rapid development of the high power klystron the method of synchronising magnetrons was abandoned.

!ladio frequency linear electron accelerators and microtrons
extraction channel
cavity and gun
extraction
multi-cell accelerating cavity
19
Figure 2.2: Schematic representation of a classica! microtron (left) and a racetrack microtron
(right).
The aforementioned machines have been used almost immediately after their completion for nuclear research. This discipline thereby became one of the major market pullers for high energy linacs. Nowadays radio frequency linear electron accelerators form standard equipment for many disciplines. In research they are e.g. employed as drivers for free electron lasers [5] [6] or as injectors for storage rings [7]. In hospitals worldwide more than 4000 electron linacs are used for radiation therapy [8], specialised firms use them to sterilise medical equipment. Industry uses them to adapt material properties by deposing energy in for example polymers [9]. In some countries it is allowed to sterilise food with low energy bremsstrahlung, produced with electron linacs.
2.1.2 Microtrons Linear accelerators are also used as accelerating sections in racetrack microtrons. A racetrack microtron or 'split field' microtron is the direct succeeder of the 'classica!' microtron proposed by Veksler in 1944 [10], see fig. 2.2. The main components of a microtron are an electron gun, a single cell microwave accelerating cavity, a homogeneous 211" rad bending magnet and an extraction channel [11 J. Disadvantages of this type of machine are the limited space available for electron source and accelerating cavity ( only one accelerating cell can be fit into the circular or bits) and the large magnet gap (necessary to house the accelerating cavity). Both these restrictions limit the maxima! achievable electron energy, since it becomes increasingly difficult to maintain magnetic field homogeneity over the large magnet sizes required.
By splitting the magnet in two 1r rad bending magnets and introducing a drift

20 Linear accelerators
space between the two bending magnets, the space for the electron source and accelerating cavity is greatly enlarged. Therefore now a linear accelerator can be used as accelerating structure and as a consequence the energy gain per cavity passage can be greatly enhanced. The magnets can become smaller-at increased field strengths due to the decreased gap'. Together with the fact that with this kind of layout high energy injection is feasible, the obtainable end energy of the microtron is greatly enlarged. Because of the shape of the orbits this kind of microton is called racetrack microtron, see fig. 2.2.
Ina microtron the weak transversefocusing of the electron bearn is provided for by the shape of the electric field in the accelerating cavity. In a racetrack microtron additional transverse focusing can be supplied by reversed field clamps at the bending magnets [12] and an Azimuthally Varying Field profile [13]. By this AVF profile the demand on the field fl.atness of the bending magnets is greatly reduced, while the acceptance is enlarged.
Since the acceptance in longitudinal phase space of all types of microtrons is quite large (13] [14], it is not necessary to use an ultra stable source of radio frequency power for the accelerating cavity. In fact most of the 'classical' microtrons and the first racetrack microtrons utilised high power pulsed magnetrons. Also today there are microtrons that operate on the base of a magnetron [15].
However, when microtrons are combined to form a cascade or with a linear accelerator as injector, it is not obvious to use magnetrons as RF power sources. The synchronisation of the radio frequency power sources is more easy to achieve with amplifier tubes, such as the klystron, than with the self excited magnetron oscillators. Disadvantages of the klystron on the other hand are the relatively high driving voltage from the modulator(~ 100 kV) and the large capital costs.
The first microtron was already operational in 1948, producing an electron beam with an end energy of 4.8 MeV [16]. The largest microtron ever being built is probably the 20 MeV microtron in Frascati [17]. The first racetrack microtron, which utilised three sector bending magnets and a three cell accelerating cavity, was operated at the University of Western Ontario in 1973 and was capable of delivering electron beams with a variable energy up to 18 MeV [18]. Since then a number of uniformly field racetrack microtrons have been put into operation, which are applied for all kind of purposes: as variable electron energy source for radiation therapy [19], as injector for electron storage rings [15] [20] or at the University of Mainz, cascaded, as high energy (800 MeV) electron beam source for nuclear experiments [21].
2.2 Parameters for a standing wave linac
A -standing wave linac consists of an array of coupled cavity resonators. The resonators are connected to a generator that provides the energy to be stored in the resonators. Part of this stored energy is delivered to the accelerated charged particle beam.

The travelling wave injector linac 21
The cavity resonators, or briefly cavities, are made out of some electrically conducting material. In each of the cavities infinitely many possible configurations of the electromagnetic fields at distinct frequencies can exist. These frequencies are called resonant frequencies and the field configurations are called pattern modes, both follow from the solution of Maxwell's equations in the cavity inside the conductor [22].
One of these modes, the first Transversal Magnetic (TM010 ) mode, has all electric field lines pointing in the same direction, parallel to the symmetry axis of the cavity. The field pattern is rotationally symmetrie around this axis, where the electric field is maximal, and has no longitudinal dependence. The magnetic field is rotating around the symmetry, or accelerating, axis and has no component along this axis. This is the mode to be used for accelerating purposes. .
The resonant behaviour of a cavity with a complex geometry can be understood by usage of an equivalent model. Therefore the resonant behaviour of each of the modes will be described by means of a lumped element circuit resonator and not by the exact field pattern that is the solution of Maxwell's equations. This approach is meaningful if the different modes are well separated. The model will not reveal any information about the actual field pattern, but is only used to describe some relevant parameters for the resonant behaviour of the cavity.
A resonator can be modelled equally well by means of a series lumped element circuit or a parallel circuit [23] consisting of a resistor, a capacitor and an inductor. In Appendix A it is shown that the behaviour of a resonator near resonance can be described by these three elements, but equally well by another set of three parameters: the resonant frequency w0 , the quality factor Q0 and the effective shunt impedance Rsh·
When using computer codes, like Superfish [25] and Mafia [26], for the design of an accelerating structure, these three parameters, and a lot of additional ones that are described in the Appendix, are calculated from the calculated electromagnetic fields in the cavities. The values obtained this way will be used in later chapters as input for the resonator model.
2.3 The travelling wave injector linac
As is a well known result from electromagnetic wave theory the phase velocity of a TM wave propagating in vacuum in a cylindrical waveguide is larger than the speed of light c. Therefore this configuration is of no use for the acceleration of charged particles. By inserting disks with a cylindrical iris in the middle the phase velocity can be lowered to any desired value. This disk loaded or corrugated waveguide can be modelled as a chain of coupled pillboxes.
In case of a standing wave linac with its complex geometry it is useful to describe each modified pillbox or cell by means of a lumped element RLC circuit and the complete accelerator as a coupled chain of these circuits, see ch. 3. Due to the complex geometry a computer program is needed to find the parameters of the cells.

22 Linear accelerators
r • z 2b 2a
-------+ ------------------------~-F-----+------ ------
Figure 2.3: Scl!ematic representation of a disk loaded waveguide (not tot scale).
This way e.g. the dispersion relation of the accelerator can be obtained once the parameters of the individual cells are known.
However, in case of a travelling wave linac consisting of coupled pillboxes the geometry is relatively simple and we are able to obtain good estimations for the basic parameters of the structure, based on its dimensions, see fig. 2.3.
2.3.1 Basic parameters of a travelling wave linac Once the component of the electric field in the waveguide along the z-axis (the propagating direction) in a TM mode is known, the complete electromagnetic wave is specified [22]. The TM010 mode in the circular accelerator waveguide has no angular dependence and the TM wave can be Fourier analysed in terms of space harmonies, related to the longitudinal periodicity ( for r ~ a ):
00
Ez(r,z,t) = L anEzfo(ànr)ej(wt-knz), (2.1) n=-oo
where 10 ( x) is the zero-th order modified Bessel function, àn is defined by
k2 = k2 - à:2 n n• (2.2)
where k = w / c is the total wave number and kn the longitudinal wave number: kn = k1 + 21rn/ D. If r/>o denotes the phase shift per cell k1 = r/>o/ D. The field is periodic in the cell length D, except for the phase factor e-i<l>o. This property is often referred to as Floquet 's theorem. In case of a tra velling wave structure k

The linac 23
corresponds with the drive frequency, the longitudinal wave number is a structure parameter, from these two figures is calculated.
Each value of n corresponds with a single value for kn and therefore with a single travelling wave. In a properly designed travelling wave linac most of the energy (typically > 80%) will be stored in the wave corresponding with n = 0. Therefore for the calculation of power flow and electric field strength along a linac (section 2.3.2) only this wave is taken into account. However, for the study of particle motion also the infiuence of the other waves has to be taken into account, see ch. 6.
If a travelling wave linac is considered as an array of coupled pillboxes with length h and diameter 2R, the standing wave mode of interest in the pillboxes is the TM010
mode, which has neither longitudinal nor angular dependence:
(2.3)
where J0 is the zero-th order Bessel function. Starting from this field configuration, the structure parameters of a travelling wave linac can be calculated: operating mode frequency wq,0 , phase velocity Vp, group velocity vg, coupling constant ke and shunt impedance rsh· The procedure for these calculations is described in extenso by Gao [2tl [28], therefore only the formulae will be stated here, see table 2.1.
Filling time The filling time of a travelling wave linac is given by
(2.4)
where L is the length of the accelerator. With the formula in table 2.1 the group velocity of the linac is calculated, yielding a filling time TJ 0.4 7 µs, in agreement with the measured value of (0.47 ± 0.02)µs. For the matching sectîon of the linac, where the phase velocity is gradually adjusted to match the increasing velocity of the electrons, periodicity was assumed for the calculation of the group velocity.
2.3.2 Power flow and electric field strength in the injector linac Once the structure parameters of the injector linac are known, the decay of the power along the linac is calculated with the power diffusion equation [29] [30]:
dP W<f>0
d = --Q-P-hcos</Ja
Z Vg OIO (2.5)
where h is the electron beam current and P is the remaining power in the electromagnetic wave at a certain place in the waveguide, <Pa is the accelerating phase.

24 Linear accelerators
Table 2.1: Calculation of the structure parameters of a coupled pillbox travelling wave linac.
Used parameters a b d h D h+d c k À
ef>o Rs,m = 0.2609 m!l(JMHz]1/2 [24] Jo(x) a1
J1(x) TM010 mode pillbox parameters radial resonant freq,uency
dissipated power
stored energy
unloaded quality factor
coupled pillbox parameters
Wo10
Po10
Wa10
Qo10
factor f 7r /2-mode resonant frequency Wir/2
operating mode frequency wi1i0
TM010 mode attenuation factor a
correction factor
coupling constant ke
phase velocity vp/ c
group velocity v9 /c
shunt impedance per unit length rsh
iris aperture pillbox radius disk thickness pillbox length
periodic length speed of light
total wave number free space wave length
operating mode metal surface resistance
zero-th order Bessel function first zero of Jo( x)
first order Bessel function
ruE b
R.,mw510eaE;,,,.b3 -1< i:>1)(b+h) ai
w5rnefiJJ-OhE;irb4 Jf(o:t) 2,4
w010Wo10
Po10
31!'ho2 Jr(at)
wo1ov11+7 W"/2(1 - f cos <Poe-ad)
kj(2.~2"Y - 1
( .J!LJ (!!2:.1.'1)2 aa1 1 b ,
f Ecore-ad l ~ - Dw" 12 . Il - k ;J; c ki - ckt V e COS 'f'O
l dw<Po _ w;,12 k.Dsînil>o c dk J - 2cw<Po
(:0 sin(~)EzJo(T J)2 D/ Pow

The linac 25
2.0 r=---,.--- --r·--·--·,---·---r--··-·--.---·-,-·---··-~--~--~
P (MW)
t 1.5
1.0
0.5
0.0 L----~-·--~--~-·-~·---··---L--~---'------.L---0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00 2.25
-+ position z (m)
7 ,---T"----.------,.-----,---........,.---,---~--~--~
E, (MV/mi
t (b)
0 ~---~--~--~--~--~------·------~ 0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00 2.25
_., position z (m)
Figure 2.4: a) The remaining electromagnetic power in the linac as a function of the distance, b)
The electric field strength in the Iinac as a function of the distance, both for a peak energy of 10
Me V.
From this remaining power the electric field strength is calculated:
Ez = (2.6)
In the matching section the structure parameters and the beam current h depend strongly on the z-coordinate.
Fig. 2.4.a and b give the power decay and the electric field strength along the injector linac for an output beam with an energy spectrum that peaks at 10 MeV. The data in these figures are calculated with eqs. 2.5 and 2.6. For these calculations the structure parameters are derived with the formulae in table 2.1, whereas the current along the linac is calculated with the computer code Parmela. The magnetron output power is taken as starting value for the power.
The energy of the output beam can be regulated by varying the beam loading

26
12
T (MeV) 11
t
10
0
Linear accelerators
150 200 250 300
-+ I, (mA)
Figure 2.5: The calculated (solid line) and measured ( dashed line) load line of the linear accelerator.
conditions in the linac, i.e. by adjusting the beam current: raising the beam current causes a lowering of the electric field strength along the linac. Fig. 2.5 shows a plot of the calculated and measured dependence of the energy peak (T) of the electron beam on the output beam current: the load line[30] [31].
2.4 Electric field shape in the linac
For beam dynamica! calculations it is convenient if the longitudinal electric field is expressed as a Fourier series of spatial harmonies, also called Floquet series (eq. 2.1). However, it is very difficult to find the coefficients in this series directly [32]. Therefore, in this section the electromagnetic field pattern is calculated by means of a mode matching technique, as was done by Pruiksma [33], see also refs. [34] and [35]. First the field pattern due to the reflection and transmission at a single diaphragm is calculated (sec. 2.4.1). Then this calculation is extended to the periodic structure of the linac (sec. 2.4.2). The thus obtained field pattern is finally translated into the Floquet expansion (sec. 2.4.3).
2.4.1 Reflection at a single diaphragm Fig. 2.6 shows a single diaphragm in the disk loaded waveguide of the linac. The 2.5 mm thick disk is replaced by an infinitely thin obstruction in the circular waveguide.

Electric field shape in the linac 27
aim-------+ b
arm~ ---------> a'rm
L ·-·-·-·-·-·-·-·-·-·-·-·-·-.. ·-. ·.-. ·.r·-·-·-·-·-·-·-· ·-·-·-z a
z=O
Figure 2.6: A single infinitely thin diaphragm in a circular waveguide, axx are the coefficients of
the various travelling waveguide modes.
The electromagnetic fields in the waveguide are expressed as a series expansion in orthonormal tra velling waveguide modes 1
:
ezn J2an (an ) :i=r nz ± b2r nJi(an/0 br e ' (2.7)
ern <f>ne'fr nZ' (2.8) h<pn ±Yn</>ne'Frnz, (2.9)
where ezn and ern are the components of the longitudinal and transversal fields, respectively, and h<pn is the component of the angular magnetic field, an is the n-th root of the Bessel function J0 , b is the waveguide radius, r n is defined by
2 2 an = r2 + ::'.__ b2 n c2 (2.10)
and Yn = it:0w /r n symbolises the wave admittance. The functions </>n are defined as:
J2 (an ) </>n = bJ1(an) Ji br · (2.11)
With these definitions the boundary condition at the waveguide surface, ezn(b) = 0, for each Ezn mode is fulfilled.
1The time dependence eiwt has been omitted for reasons of clarity

28 Linear accelerators
For imaginary values of r n the waves in eqs. 2.7 2.9 are propagating. For real values of r n the waves are decaying. In an accelerator waveguide normally only the r 1 mode is propagating, all other modes are decaying.
The fields at the left and right-hand side of the diaphragrn in fig. 2.6 are expressed as a series expansion of left and right travelling waves with coefficients a"'"'' as indicated in fig. 2.6: for z < 0:
and for z > 0:
00 00
E - """"' ,/.. -rmz + '"' ,/.. rmz r - L..J aim'l'me L..J a"m'l'me , m=l m=l
00
E' = '"°' a' ,;.. e-r,,.z r L.-t rm Y'm '
m=l 00
H' _ '"°' Y. 1 ,;.. -r,,.z 'P - L..J marm'l'me ·
m=l
(2.12)
(2.13)
(2.14)
(2.15)
For z = 0 the electrornagnetic field is expressed as a similar series of aperture modes:
00
l'(r) = L bMIJM 0 ::; r ::; a, (2.16) M=l
00
H(r) E CMIJM 0 :S r :Sa, (2.17) M=1
where 'rfn is given by:
(2.18)
a is the aperture radius. Continuity of the fields at the aperture requires that at z = 0 both the electric
and magnetic fields for the three independent sums are equal for 0 :S r ::; a:
00 00 00
L(a;m + a"m)</>m = L bM'r/M = L a~m</>m, (2.19) m=l M=l m=l
00 00 00
EYm(a;m a"m)<Pm = L CMIJM = E Yma~m<l>m· (2.20) m=l M=l m=l
Multiplication of eq. 2.19 by <f>n and integration over the radial interval [O, a], that for the waveguides modes <Pm can be extended to the interval [0, b] due to the boundary condition ern = 0 for a < r < b, yields
q
a;n + arn = L bM RnM = a~n n = 1, 2, ... 'p, M=l
(2.21)

Electric field
Re(E,)
(a,u,)
400
t 300
in the linac
200 -
""L/ -100
1 1
-
-
./
1 1
30 40
--> r (mm)
Figure 2. 7: The real part of the total radial electric field at the diaphragm after usage of a numerical filter for the coefficients.
where (2.22)
Multiplication of eq. 2.20 by 'T/n and integratîon over the interval [O, a] yields
p p
L Ym(aim - arm)RmN CN L Yma~mRmN N 1,2, ... 'q. (2.23) m=l m=l
Eqs. 2.21 and 2.23 form a set of lînear equations of finite size that after some manîpulations can be solved to find a solution for the fields due to a reflection at a single diaphragm in a circular waveguide [33]. Note that the sums in these equations have been truncated for practical implementation in a computer code.
For optimum results the ratio of waveguide and aperture modes (p/q) should be approximately equal to the ratio of the waveguide and aperture radius: p/q ~ b/a. For e.g. p 128 ( q 32) good results are obtained for the electromagnetic fields when a filter is used to damp the higher order modes, that are generated to match the boundary condition at r = a. See fig. 2.7 for an example of a calculated field pat tem.
In the calculations it is assumed that there is only one incident mode, the propagating mode, at the diaphragm. This single incident mode generates numerous reflected and transmitted modes. However, only the mode with propagation constant r1 is propagating, all other modes are decaying. In fact they decay so rapidly that after a cell length their infiuence can be neglected with respect to the propa-

30 Linear accelerators
1 1
ai --t----b1 -}~
1 a '1 ------
-·-·--·-·-----L---------==:->a ::_ __ l--·-·---·--·-·-
1
i b'1-1-b'2 1 1
! -Lai 1 +b2 i i
z = -D z = -D/2 z=O z = D/2 z= D
Figure 2.8: Part of the infinitely long periodic waveguide, the symbols denote the coefficients of the different propagating modes in the structure.
gating mode [33]. This property is used to calculate the fields in the periodic part of the linac structure in the next section.
2.4.2 The periodic structure Fig. 2.8 shows part of the infinitely long periodic waveguide of the linac.
The fields of the propagating modes in the TM010 mode in the structure are given by (cf. eqs. 2.12 and 2.13), for -D < z < 0
and for 0 < z < D
a~ef>1e-iktz + b~ef>1eik1z, a~Yi</>1e-ik1z - b~Yi</>1eik1z,
E; = a;<f>1e-ik1z + b;</>1eik1z,
H; = a;Yi</>1e-ikiz - b;Yief>1eikiz,
(2.24)
(2.25)
(2.26)
(2.27)
where ik1 I'1. The coefficient a1 at z = -D/2 for the right travelling component of the radial E-field is linked to the corresponding coefficient at the diaphragm by
(2.28)
The other coefficients halfway the cells are linked similarly to the coefficients at the diaphragm. If R and T are the reflection and transmission coefficients, respectively,

Electric field in the linac 31
for the propagating modes, the coefficients on both si des of the diaphragm are related by
a~ = Rb~ + Ta~, b~ Ra~+ Tb~.
(2.29)
(2.30)
Combination of eq. 2.28 and eqs. 2.29 and 2.30 yields a relation for the fields at z = ±D/2:
[ ab11 ] = [ ~e!i·T·k1D R l [ ] (2.31)
(T _ ~~e-ik1D ~: .
The Floquet theorem also implies the following relation for the coefficients of the propagating mode, that are spaced exactly one structure period apart:
(2.32)
Eqs. 2.31 and 2.32 combine to an eigenvalue equation for the field components at z = -D/2:
(2.33)
The non-trivial solution of this equation can be written as a dispersion relation [33]
With B the susceptance ( a real quantity [36]) defined by
iB = -2R. 1 +R
(2.34)
(2.35)
Fig. 2.9 depicts the calculated dispersion relation ( eq. 2.34) of the linear accelerator. The operating mode <Po of the linac equals ~1!', the calculated frequency at this operating mode is 3011 MHz. The true operating frequency of the linac is 2998.3 MHz. This discrepancy is probably due to the various approximations that have been made in the derivation: e.g. neglecting the thickness of the iris and taking only the propagating modes into account.
Once the value of i/>0 has been determined, w (or k f) is known and B is calculated, the coefficient b1 can he expressed is terms of a1 by means of the first row of eq. 2.33, using T R + l. We choose a1 = l. Nmv the propagating fields in the region -D < z < 0 are known. From these modes the decaying modes for -D < z < 0,

32 Linear accelerators
x10' rad/s 19.1
"' 1
19.0
18.9
18.8
18.7
18.6
18.5 0.0 0.2 0.4 0.6 0.8 1.0
..... .P (1T rad)
Figure 2.9: The calculated dispersion relation: the frequency w as a function of the phase shift
efi per cell.
generated by reflections at z = - D and z = 0 are calculated with the results from the previous section. Now the total field pattern in the region -D < z < 0 is known, the field in the other cells is calculated by means of the Floquet theorem.
In fig. 2.10 the electric field pattern at five different values of wt is drawn (wt = 0, !71', ~71', ~71', ~rr ). For wt = ~71' the operating mode of the linac, the field in the first cell is the same as the field in the last cell for wt = 0.
A wave velocity, vw, can be defined because in a timet <f>0 /w, the wave travels over a distance D:
wD w Vw = - = -. (2.36)
<Po k1
This wave velocity equals the phase velocity of the accelerating component in the Floquet series (n = 0). In the periodic structure of the linac the particle motion is highly relativistic and therefore the phase velocity should be equal to the velocity of light c. The calculated phase velocity is: Vp = 3.011 · 108 m/s, slightly higher than ~ due to the frequency wf,,. being a bit higher than the operating frequency of the lmac.
2.4.3 Fourier space harmonies For parti de dynamical calculations it is convenient if the Ez·field is written as a series expansion in longitudinal space harmonies as given in eq. 2.1. For the calculation of

Electric field in the linac 33
c.Jt=O "'t=rr/6 600 600
E, (a.u.) E, (a.u.) t t
300 300
01 0
-300 -300
-600 -600 0 17 33 50 66 83 99 0 17 33 50 66 83 99
-+ z (mm) -+ z (mm)
c..>t=211/6 c..>l=311/6 600 600
E2
(a.u.) E. (a.u.) t t
300 300
0 0
-300 -300
-600 -600 0 17 33 50 66 83 99 0 17 33 50 66 83 99
-+ z (mm) -+ z (mm)
r.it=47r/6 600
E, (a.u.) t
300
0
-300 u -600
0 \7 33 50 66 83 99
-+ z (mm)
Figure 2.10: The on-axis E, pattern as a function of the position over three full cells for five
different values of wt, the vertical lines coincide with the position of the disks.

34 Linear accelerators
Table 2.2: The coefficients an of the Fourier space-harmonics, for'the ~7r mode, calculated with the presented theory and with the computer code Superfish.
n an theory an Superfish -3 -4.6 -10-3 -1.2. 10-2
-2 -3.7 .10-2 -8.1·10-2
-1 -3.5. 10-1 -4.6 .10-1
0 1.0 1.0 1 7.6 .10-2 1.4. 10-1
2 9.6 .10-3 2.2 .10-2
3 1.2. 10-3 3.2. 10-3
the coefficients it is convenient to rewrite this series in terms of sines and cosines:
+oo Ez(r,z,t) = L: Io(&nr)Eoz(ancos(wt- knz) + bnsin(wt knz)). (2.37)
n=-oo
Fig. 2.10 shows for wt = ~7r a symmetrie function with the symmetry axis in the middle of the three cells. This even pattern can be described with only the cosineterms in eq. 2.37:
+oo Ez(z) = L: anEoz cos(knz), (2.38)
n=-oo
where the time t and the radial position r have been put zero. For the ~7r mode, the coefficients an can be calculated using a Fourier analysis
over three cells: 1 {3D
an= 3DEoz Jo Ez(z) cos(knz)dz. (2.39)
Where Ez(z) is the field in fig. 2.10, for wt = ~7r. The calculated coefficients are given in the second column of tab. 2.2, all co
efficients are divided by a0 • In the third column the coefficients calculated with the computer code Superfish are given. The agreement between the two results listed in the table is reasonable. The remaining discrepancy is probably due to the finite thickness of the iris in the Super:fish calculations. For higher order Fourier coefficients the accuracy in the numerically calculated fields is insufficient to obtain accurate results, since for these higher orders small field errors cause significant errors in the small coefficients.
References
[1] Wideröe R., Über ein neues prinzip zur Herstellung hoher Spannungen, Archiv für Elektrotechnik vol 21 (1928) 387, in German.

References 35
[2] Blewett J.P., The history of linear accelerators, in Linear accelerators, Eds. Lapostolle P.M., Septier A.L., North-Holland Publ. Co. Amsterdam (1969).
[3] Collins G.B., Microwave magnetrons, McGraw-Hill book Comp. Ine. New York (1948).
[4] Demos P.T., Kip A.F., Slater J.C., The M.I. T. linear electron accelerator, Journ. of Appl. Phys. vol. 23, no. 1 (1952) 53-65.
[5] Ernst G.J., Witteman W.J., Verschuur J.W.J., Mols R.F.X.A.M., Oerle B.M. van, Bouman A.F.M., Botman J.I.M., Hagedoorn H.L., Delhez J.L., Kleeven W.J.G.M. , The TEU-FEL project, Infrared Phys. Technol. vol. 36, no. 1 (1995) 81-98.
[6] Amersfoort P.W. van, European free-electron laser user facilities, Proc. Eur. Part. Acc. Conf. London (1994) 83-87.
[7] Mülhaupt G., Status of the ESRF, Proc. Eur. Part. Acc. Conf. Nice (1990) 65-69.
[8] Hamm R.W., Commercial applications of linacs, Proc. Lin. Acc. Conf Albuquerque (1990) 558-562.
[9] Gisbergen J.G.M. van, Electron beam irradiation of polymer blends, Ph.D. Thesis, Eindhoven University of Technology (1991).
[10] Veksler, V.I. A new method for acceleration of relativistic charged particles, J. of Phys. USSR, 9 (1945) 153-158.
[11] Kapitza S.P., Melekhin V.N., The microtron, Harwood Academie Publishers, Chur (1978).
[12] Babié H., Sedlacek M., A method for stabilizing particle orbits in the race-track microtron, Nucl. Instr. and Meth. 56 (1967) 170-172.
[13] Delhez J.L., The azimuthally varying field racetrack microtron, Ph.D. Thesis, Eindhoven University of Technology (1994).
[14] Henderson C., Heymann F.F., Jennings R.E., Phase stability of the microtron, Proc. of the Phys. Soc. vol. 66B (1953) 41-49.
[15] Green M.A., Rowe E.M., Trzeciak W.S., Wineer W.R., Design and operation of the 100 Me V Aladdin injector, IEEE Trans. on Nucl. Sci. vol. NS-28, no. 3 (1981) 2074-2076.
[16] Henderson W.J., LeCaine H., Montalbetti R., A magnetic resonance accelerator for electrons, Nature, 162 (1948) 699.
[17] Bizzarri U., Ciocci F., Dattoli G" De Angelis A., Gallerano G.P., Giabbai I., Giordano G., Letardi T., Messina G., Mola A., Picardi L., Renieri A., Sabia E., Vignati A., Fiorentino E., Marino A., Above threshold operation of the ENEA free electron laser, Nucl. Instr. and Meth. A250 (1986) 254-257.

36 Linear accelerators
[18] Froelich H.R., Thompson A.S., Edmonds Jr. D.S., Manca J.J., McGowan J.W., MacDonald J.C.F., Beard J., Bees G., Three cavity variable energy racetrack microtron with intra-sector beam focusing, Nud. Instr. and Meth. 143 (1977) 473-486.
[19] Huizinga H. Private communications, Dr. Daniel den Hoed kliniek, Rotterdam, The Netherlands (1994).
(20] Webers G.A., Design of an electron-optical system /or a 75 Me V racetrack microtron, Ph.D. Thesis, Eindhoven University of Technology (1994).
[21] Herminghaus H., Feder A., Kaiser K.H., Manz W., Schmitt H. v.d., The design of a cascaded 800 Me V normal conducting C. W. racetrack microtron, Nucl. lnstr. and Meth. 138 (1976) 1-12.
(22] Jackson J.D., Classica/ electrodynamics, John Wiley & Sons Ine., New York (1975).
[23] Coppens J.E., Equivalent circuit description of a loop coupled cavity, January 1995 (unpublished).
[24] Döme G., RF theory, in CERN Accelerator School RF engineering /or particle accelerators, CERN report 92-03 (1992).
(25] Superfish, Reference manual, Los Alamos Accelerator Code Group, Los Alamos National Laboratory, Los Alamos, USA (1987).
[26] The Mafia colla.boration, Mafia user guide (1989).
[27] Gao J., Analytica/ approach and sealing laws in the design of disk-loaded travelling wave structures, Part. Acc. Vol. 43(4) (1994) 235-257.
[28] Gao J., Analytica/ formulae /or the resonant frequency changes due to opening apertures on cavity walls, Proc. of the 1992 Eur. Part. Acc. Conf. Berlin (1992) 865-867.
(29] Leiss J.E., Beam loading and transient behavior in travelling wave electron linear accelerators in Linear accelerators, Lapostolle P.M., Septier A.L. eds., North Holland Publ. Comp., Amsterdam (1970) 147-172.
[30] Wijs M.C.J. de, The 10 MeV linac, Internal report VDF/NK 95-25, M.Sc. Thesis Eindhoven University of Technology (1995).
[31] Hammen A.F.J., Internal Report, M.Sc. Thesis, Eindhoven University of Technology (1996).
[32] Slater J.C., Electromagnetic waves in iris loaded waveguides, MIT technical report no. 48 (1947).
[33] Pruiksma J.P., Electromagnetic fields in a periodically disk loaded circular waveguide, Internal Report VDF /NK 96-12, M.Sc. Thesis, Eindhoven University of Technology (1996).

References 37
[34] Collin R.E., Field theory of guided waves, IEEE Press, New York (1991).
[35] Masterman P.H. en Clarricoats P.J.B., Computer field-matching solution of waveguide trnnsverse discontinuities, Proc. IEE, Vol. 118, no. 1 (1971) 51-63.
[36] Pruiksma J.P" Leeuw R.W. de, Botman J.I.M., Hagedoorn H.L., Tijhuis A.G., Electromagnetic fields in periodic linear travelling wave structures, to be published in the Proc. Linac Conf. Geneva (1996).

38 Linear accelerators

3 A model for coupled cavity linacs
A model that describes the behaviour of singly and bi-periodic chains of coupled resonators both in infinitely long and terminated chains is presented. Also the non ideal behaviour of the chain is described 1 .
3.1 Infinitely long periodic chains of coupled resonators
In this section the travelling wave solution for an infinitely long chain of coupled resonators is given on the basis of a series RLC-circuit representation. This is clone both for singly periodic chains, including only nearest neighbour coupling between the individual resonators, and for bi-periodic chains, including also next nearest neighbour coupling.
3.1.1 Singly periodic chain with nearest neighbour coupling Fig. 3.1 shows the RLC-circuit representation of an infinitely long chain of identical coupled cavities .. In this figure Rn, Cn and 2Ln represent the resistance, capacitance and inductance of cell n, respectively. The inductance L, introduced in chapter 2,
1This chapter is based on a study performed by J .E. Coppens [1].
Figure 3.1: The equivalent circuit of a chain of coupled resonators, see text for an explanation of
the symbols.
39

40 A model for coupled cavity linacs
is now split in two inductances Ln in series. The circuit equations, for generator voltages Vn(t) = Vnejwt, are found with Kirchhoff's laws [2]:
Vn = In ( 2jwLn - j + R,.) + jwkn-1,n J Ln-1Lnin-l + jwkn+l,n J Ln+l Lnin+l •
(3.1) In is the current circulating in cell n and kn-1,n( kn+1,n) is the parameter determining the coupling strength between cell n - 1 ( n + 1) and cell n. The last two terms in eq. 3.1 represent the magnetic coupling between adjacent cells.
By introducing the generalised amplitudes of cell n, Xn = ,/2L;Jn and Yn = Vn/(jwv12L:,.), eq. 3.1 is rewritten as:
. Wo,n) + kn-1,n X + kn+l,n X J Qnw 2 n-1 2 n+l• (3.2)
where wo,n is the resonant frequency of cell n and Q" the quality factor of cell n. By introducing the generalised amplitudes, the circuit equations are now written without reference to the lumped element circuit parameters (R.,., Ln,Cn)·
The generalised amplitude X" is related to the average stored energy in cell n at resonance, Wn:
~XnX~ = Lnll"12 = Wn, (3.3)
and Yn to the power delivered by generator n, also at resonance:
(3.4)
The homogeneous set of equations without losses is solved. This implies no drives (Yn = 0) and Qn = oo (Rn = 0). Moreover, we assume the structure to be periodic, which means all cells have equal resonant frequency w0 and coupling constants k. With these assumptions eq. 3.2 is written as:
( w
2) k Xn 1- W~ + 2(Xn-l +Xn+l) = O. (3.5)
Following Brillouin [3] this homogeneous equation is solved by substitution of the tra.velling wave:
(3.6)
where </>is the phase shift per resonator, the time dependence eiwt is omitted, because it already is implied by the circuit equa.tions. Substitution of this tra.velling wave in eq. 3.5 yields:
w2 1 + kcos(</>) = -%·
w (3.7)

lnfinitely long periodic chains of coupled resonators 41
X27T10 9 X27T10 9
3.2 3.2
Î w (rad/s) Î w (rad/s)
(a) (b)
3.1 3.1
/ /
3.0 3.0
2.9 2.9
2.8 2.8
0.00 0.25 0.50 0.75 1.00 0.00 0.25 0.50 0.75 1.00
~ cp (1T rad) ~ cp (1T rad)
Figure 3.2: a) Brillouin diagram for a singly periodic chain, the squares denote the solutions for
a 17 cell chain terminated with full end cells, k = -4.5%, wo = 61r109 rad/s; b) Brillouin diagram
for a doubly periodic chain, the squares denote the solutions for a 17 cell chain terminated with
full end cells; kac = -4.5%, kaa = -0.2%, kcc = 0.1 %, Wa =Wc = 6?r109 rad/s.
This relation between the angular frequency w and the phase shift </> of the travelling wave per resonator is called the dispersion relation. This relation can be plotted in a so-called Brillouin diagram, see fig. 3.2.a. The frequency range for which travelling waves can exist is the so-called passband. Outside the passband the phase </> has an imaginary value which results in an exponential decay of the wave in eq. 3.6.
It follows from eq. 3. 7 that there is a degeneracy of w in </> and -</>, which means there is no difference in phase velocity between a left and a right travelling wave with the same frequency. The general travelling wave solution, with complex amplitude Xn, for an infinitely long chain is therefore given by:
(3.8)
where A- and A+ are the (complex) amplitudes of the left and right travelling wave, respectively. The array of Xn's is called the mode-vector.

42 A model for coupled cavity linacs
8.1.2 Bi-periodic chain including next nearest neighbour coupling In section 3.3.2 it is shown that it is advantageous to operate a standing wave structure in the 7r /2-mode. In this mode only half of the cells contains field and stores energy. Therefore it is advantageous to use two alternating types of cells to form an accelerating structure, instead of taking all cells equal. This type of structure is called a bi-periodic chain. To describe the behaviour of this type of chain accurately, not only the coupling between neighbouring cells has to be taken into account, hut also the next neighbour (or direct) coupling has to be regarded.
The derivation of the dispersion relation is analogous to the singly periodic chain, therefore only the result is stated here [2]:
where kac is the coupling coefficient between neighbouring cells, kaa (kcc) is the coupling coefficient between the next nearest even (odd) cells, also called direct coupling coefficients and Wa (wc) is the resonant frequency of the even (odd) cells.
The genera! travelling wave solution reads:
(3.10)
The ratio between the amplitudes for the two different types of cells, which depends on the phase shift per resonator, is given by:
(3.11)
Under the constraint given in eq. 3.12 the ratio is undetermined for ef> 7r /2. Fig. 3.2.h shows a plot of the dispersion relation in eq. 3.9. The single passhand
of the singly periodic chain is now split in an upper and lower branch. Due to the quadratic form of the dispersion relation it is degenerated in the sign of kac· If we take a negative value for kac and by definition keep the ratio A/C positive, the dispersion curve follows the upper branch from </; = 0 to <P = 7r /2, then makes a jump and follows the lower branch from </; = 1r /2 to </; = 7r, this is the continuous line in the figure. For positive values of kac the dashed line applies.
The sign of kac is a structure parameter. For a disk loaded travelling waveguide, where the coupling between the fields in the neighbouring cells is effectuated via the electric field penetrating through the iris, the coupling constant is positive. This implies a positive group velocity and this type of structure therefore is called a forward wave structure. For a magnetically coupled hi-periodic standing wave structure the sign of kac can either be negative or positive. Positive e.g. for the

Terminated resonators 43
side coupled accelerating structure [4], negative e.g. for the on axis coupled type of structure, where the orientation of the coupling slots changes in the coupling cells [1].
From an evaluation of the dispersion relation it follows that in the lossless case at </> 7r /2 the group velocity in the bi-periodic structure equals zero. However, if losses are introduced the group velocity (and therefore the filling time) of the structure becomes finite [5].
The frequency region between the two branches is called stopband. With a good choice of parameters of the bi-periodic chain this stopband can be closed at </> = 7r /2: both terms at the right-hand side of the dispersion relation in eq. 3.9 must be equal and .zero:
w2 2 1 a k = 1 - Wc - -2- - aa - ~ 2
w1r/2 w1r/2 kcc = 0, (3.12)
yielding a dispersion curve similar to that of the singly periodic chain. For </> = 7r /2 one type of cells is empty and the dispersion relation at this par
ticular phase shift is given by either
1- - kaa = 0 or 1
depending on the type of cells that conta.ins field.
w2 +-kcc w1r/2
0,
3.2 Terminated periodic chains of coupled resonators
(3.13)
In terminated chains, the travelling waves found as solution for the infinitely long chain will be reflected at the outer resonators (or cells) and combine in to standing waves. The kind of reflection depends on the geometry of the end cell, which can be regarded as a boundary condition. Here only one type of end cell will be considered: 'full' ones. In the first part we describe singly periodic terminated chains with nea.rest neighbour coupling, in the second part the description will be expanded to bi-periodic terminated chains, including next nearest neighbour coupling. In order to be a.ble to manipulate the expressions more easily, the circuit equations for the bi-periodic terminated chains will be written down by applying matrices.
For solutions of chains terminated with half end cells and a combination of full and half end cells we refer to literature (1] [2].
3.2.1 Singly periodic chain with nearest neighbour coupling A full end cell is a complete cell that couples only on one of its sides to another cell, see fig. 3.3. Boundary conditions for the generalised amplitudes are:
(3.14)

44 A model for coupled cavity linacs
bi-secting plane ".-..... ".$0 .. .1 -1 Yo o 1 '· ./\ ""-..... · " ......
0J2f2) two. halve end cells
endcell
0J2f2) two full end cells
endcell ".-..... <XJ . ' I • "" -1 0 1 '· ./ '"- ...... · ". 0J2f2)··· one full and one half end cell
Figure 3.3: Schema.tic representa.tion of the three p088ible types of singly periodic terminated
cha.ins.
With these the standing wave solution is found to he [6]:
X~ = Asin(n + l)</l, (3.15)
with <P = "~1~>, q = 0, 1, ... ,N. Eq. 3.15 represents N + 1 possible solutions for a standing wave, that originate
from the superposition of two tra.velling waves. Each of these solutions is called a mode, denoted by the mode number q or the corresponding phase shift <P per resonator. The collection of amplitudes X~ of all the cells fora certain mode (fixed q) form the so called mode vector v. Each mode has a distinct resonant frequency that is found by substituting the phase shift per resonator in the dispersion relation (eq. 3.7). The Brillouin diagram shows the resonant frequencies of a terminated chain as discrete points on the dispersion relation, see fig. 3.2.a
The unloaded quality factor for a chain of resonators is given by:
(3.16)
Which means that the quality factor of a chain operating in a certain mode can be calculated from the quality factors of the individual cells and the elements of the mode vector X'l.

Terminated
bi-secting plane r·-·-1,,.-$[D i -1 ro 0 1 2
. "' '·-·-·' ·-
end cell
two halve end cells
end cell ,,.-· .... ï·-·-.ITD EEE-·-·-j"·-·-. ( -2 ) -1 0 1 2 2N-2 2N-1 2N . 2N+d 2N+2 \1 \, /• . . k / ·-..... · 1 _____ J l--·-·J • __ .....
two full end cells
45
Figure 3.4: Schematic representation of the three possible types of doubly periodic terminated
chains.
3.2.2 Bi-periodic chain including next nearest neighbour coupling Again only chains terminated with even numbered full end cells will be considered (fig. 3.4).
The same boundary conditions as for the singly periodic chain apply. From the singly periodic chain, terminated by two full end cells, we know tha.t the standing wave solution should be sine-like. If the circuit equations for the bi-periodic chain are written down, we see that in order to obtain a pure sine-like solution the equations for the end cells should be modified. This modification corresponds with a detuning of the end cells according to [l]:
W~ _ kaa) w2 2 ·
{3.17)
If the passband is small (w~ ~ w2), this can be simplified to:
(3.18)
The solutions for the two types of cells read:
X:Jn Asin(2n + l)</> X:Jn+I = C sin(2n + 2)</>, (3.19)

46 A model for coupled cavity linacs
with the phase shift per resonator ef> = ~'k~~l and the mode number q = 0, 1, ... , 2N. The ratio A/C is given by eq. 3.11. See fig. 3.2.b for a depiction of the solution of a 17 cell bi-periodic chain terminated with full end cells.
Matrix formulatîon It is convenient to write the bi-periodic circuit equations for a chain terminated with full end cells with matrices and vectors:
with
and
X'1=
1 M=-
2
T=
(2 - kaa) kac kac 2 kaa kac
0 0 0 0
Wa Ü 0 Wc 0 Û 0 Wa 0
0 0 0
0 0 0
ka.a 0 ka.c kcc 0 2 kac ka.a
kaa ka.c 2 0 kcc kac
0 kaa
Q Wa Q Û
Q Wc Û
0 Wa
0 0
0 0
ka.c kaa. 2 kac
kac (2 - kaa)
(3.20)
(3.21)
(3.22)
In eq. 3.20 Áq represents the eigenvalues 1/w~, found by insertion of the phase shift per resonator in the dispersion relation (eq. 3.9). Note that X'l is given by the expressions in eq. 3.19.
By using the fact that T is a diagonal matrix, the problem is rewritten as an eigenvalue problem with M r-1 MT-1 and x = Tx:
Mx->.x =IT. (3.23)
It can be shown that the matrix M is symmetrie [1]. This implies that the eigenvectors belonging to different eigenvalues for the eigenvalue problem with matrix M are orthogonal and form a complete set. The orthogonality relations are
(-q -r) _ ~ (N + l)(w~A2 + w~C2) X ,X - Uqr
2 l (3.24)
for the 7r /2-mode C is replaced by Awa/wc. The Kronecker delta is denoted by Öqr·

Non ideal structures: perturbation calculation 47
3.3 Non ideal structures: perturbation calculation
By linear perturbation of the coupled resonator equations, expressions for the frequency shifts of the chain modes due to small errors in the resonant frequencies of individual cells can be found. In the first paragraph the perturbed mode frequencies for a doubly periodic chain terminated with two full end cells will be calculated to illustrate the perturbation mechanism. In the second paragraph the mechanism for the perturbation of the fields is described. In the third paragraph a perturbation analysis for the fields in the 7r /2-mode is presented.
3.3.1 Perturbation of the frequencies of the chain modes We start with the solution of the q-th mode of the eigenvalue problem:
(3.25)
Define Dq = ÀqT2 and allow perturbations in the even cell resonant frequencies w~(:zn) = Wa + DWa(2n) and odd cell resonant frequencies w;(Zn+I) = Wc + DWc(2n+1)·
These perturbations lead to a shift in the resonant frequencies of the resonator chain w; Wq + DWq and a change in the eigenvectors v· v + b'v.
lf higher order terms are neglected, the perturbed matrix Dq* is given by
(3.26)
with
b'C b'Q = (3.27)
0
b'C contains the perturbations of the individual frequencies of the individual cells and óQ the perturbations of the mode frequencies of the chain.
After substitution of eq. 3.26 in eq. 3.25, insertion of the perturbed eigenvector xq•, subtraction of the homogeneous equation and disregarding the higher order term, we get
(3.28)
The perturbations of the mode frequencies are isolated by taking the inner product with xq:
(3.29)
Using the symmetry of the matrices M and Dq and the homogeneous equation (eq. 3.25), it follows:
(r, 8Dqv) = o. (3.30)

48 A model for coupled cavity linacs
This expression relates the perturbations in the resonant frequency of mode q of a structure with the perturbations in the individual cell resonant frequencies. With eq. 3.26 and using the symmetry of T eq. 3.30 is written as
_ (v,óOXI) Wq - (T?f'I, TX'lf (3.31)
With the assumption that Wa ~ wc, this becomes for a bi-periodic structure terminated with full end cells:
ÓWq 2 Wq = (N + I)(A2 + 02)
[Ê ÓWa(2n) A2 sin2 ((2n + l)(q + 1)11') +El ÓWc(2n+l) 02 sin2 ((2n + 2)(q + 1)11')] . n=O Wa 2N + 2 n=O Wc 2N + 2
(3.32) This expression states that the relative frequency shift of a certain mode is equal to the sum over all cells of the relative frequency shifts times the stored energy, normalised to the total stored energy in the structure in this mode.
3.3.2 Perturbation of the field patterns of the chain modes To investigate the effect of individual resonant frequency errors on the field patterns, we again start at eq. 3.28. The inner product with X1', r =f:. q is taken:
(3.33)
Since Dq = w;fw;Dr, this equation can be written as
( [w; - w
2 ] ) ( 2ó0 ) ( 2ów T
2 ) (xr,MóXI)- xr, w; q + 1 DróXI = xr, w; XI - xr, w: XI ,
(3.34) where eq. 3.26 has been used. Working out the inner product, subtracting the homogeneous equation and making use of the symmetry of matrix T, yields:
(3.35)
The last term is zero (r =f:. q and eigenvectors are orthogonal), with Dr = T2 /w; and the symmetry of T this equation is rewritten as:
(3.36)

Non ideal structures: perturbation calculation 49
We expand (3.37)
and w2 (X" oCX'I) 2 r ..,.---'--..,..
w2 - w2 (TX" TX") · q r '
(3.38)
Investigation of this equation shows that the closer the resonant frequencies in a chain of resonators, the more detuning of an individual cell will effect the mode vectors. Since the r. /2-mode in the frequency domain is the most isolated mode in the dispersion curve its mode vector will be least sensitive to tuning errors.
To prove quantitatively the advantages of the r. /2-mode the standing wave solutions xq would have to be substituted in eq. 3.38. However this yields terribly complex equations which offer no insight. For the singly periodic case it can be done qui te readily, as was shown by [2]. Here it is also proved that in the 7r /2-mode to first order errors in the individual resonator frequencies do not contribute to errors in the field levels in the even numbered resonators.
3.3.3 Perturbation analysis for the fields in the 7r /2-mode Eq. 3.38 does reveal the advantage of the use of the 7r /2-mode over the other chain modes. However, due to its complexity, it offers no insight in the behaviour of the field pattern of the r. /2-mode, which is perturbed by the influence of losses, the presence of a stopband or errors in the individual resonant frequencies.
The perturbed field pattern in the r. /2-rnode is found by direct solution of the disturbed coupled resonator equations. We assume kaa = kcc = 0 , which does not influence the first-order results [7], and allow individual resonant frequencies for the different cells: Wo,n = wo + Dwo,n, here Wo is the average resonant frequency of the even cells and Dwo,n the perturbation of the resonant frequency of the n-th cell. Since W!!. = w0 the coupled resonator equations fora finite chain, terminated with full end
2
cells, is in a first order approximation written as:
X (-2Swoo _ ..L) + ~X O W Qa 2 l
X (- 2ówo 1 _ _j_ ~ + ~ (X + X ) 1 wo Qc} 2 0 2
(3.39)
' ) k - ~ + ~X2N-1
If all drives are assumed to be zero, except the one in cell 2N and assuming a field strength X 0 in cell 0, the recursive solution for the fields in the odd cells in a first order approximation is given by
n { 4 2
N . j ( 2n + 1) } Xo ( ~ 1) -k - L Dwo,2n + k Q ·
acWO n=O ac a (3.40)

50 A model for coupled cavity linacs
This equation states that losses (finite Qa) and frequency errors in the even cells cause fields and phase errors in the odd cells.
For the even cells the solution reads:
(3.41)
where, to first order, errors in the resonant frequency drop out. The influence of a stopband on the fields in the even cells is given by [2)
{ 2 2 4 · N-1 }
X2n = Xo(-lt 1 + k2 ; Q + k2 J Q L: (2m + l)ówo,2m+i , ac a c acWo a m=O
(3.42)
in this equation the stopband Ów8 is hidden as the average frequency difference in the odd cells:
1 N-1
ÓWs = N 'l: 6wo,2m+l · m=O
(3.43)
Eq. 3.42 implies that the stop band induces a loss dependent phase shift in cell n [7]:
(3.44)
For relatively short structures with a small stopband this phase shift is negligible. However, for long structures (n large) or an appreciable stopband 6ws this phase shift becomes substantial.
References
[1) Coppens J.E., Design study for the accelerating cavity of the racetrack microtron Eindhoven, Internal Report VDF /NK 94-18 M.Sc. Thesis, Eindhoven University of Technology (1994).
(2) Nagle D.E., Knapp E.A., Knapp B.C., Coupled resonator model for standing wave accelerator tanks, Rev. of Sci. Instr., vol. 38, (1967) 1583-1587.
[3] Brillouin L., Wave propagation in periodic structures, Dover Publications Ine., New York (1953).
[4] Wassink C.H.Ph., Cavity modelling /or the side coupled cavity linac of the European spallation source project, Internal Report VDF /NK 94-38, Eindhoven University of Technology (1994).
[5] Wilson P.B., Structures for superconducting electron linacs and RF separators, IEEE Trans. on Nucl. Sci. vol. 16, no. 3, (1969) 1092-1103.

References 51
[6] Pol van der B" Chains of magnetically coupled circuits, The Electrician, vol. 89, (1922) 33.
[7] Knapp E.A., Standing wave high energy linear accelerator slructures, Rev. of Sci. Instr. 39, (1968) 979-991.

52 A model for coupled cavity linacs

4 The accelerating cavity of the Racetrack Microtron Eindhoven
The accelerating cavity of the Racetrack Microtron Eindhoven is described. The numerical design of the structure is done with a combination of two computer codes. The demands on various structure parameters are derived. The fabrication and tuning procedure of the cavity are described. Finally the measured parameters of the cavity are presented.
4.1 Introduction
In this section first the choice for the on-axis coupled type of accelerating structure for the Racetrack Microtron Eindhoven is explained. Then the design procedure and fabrication sequence of the cavity are described.
4.1.1 Choice of type of structure The demands on the accelerating structure of the Racetrack Microtron Eindhoven are listed in table 4.1. The operating frequency of the cavity is adapted to the operating frequency of the linac. The quoted energy gain is dictated by the design of the microtron [l]. The magnetron, that feeds the cavity, delivers 0.2 MW for injection locking purposes to the second magnetron ( ch. 5), leaving approximately 1.8 MW RF power available for the cavity. The maximum length for the structure was agreed with the designer of the microtron [l]. The demand on the beam hole radius is dictated by the wish for a large acceptance of the microtron.
Table 4.1: Demands on the accelerating structure of RTME.
operating frequency (MHz) 2998.3 energy gain per passage (Me V) 5.06 total microwave power available (MW) 1.8 maximum length (m) 0.50 minimum beam hole radius (mm) 8.0 minimum effective shunt impedanc~-"(_M_f!~/'--m--'-) ___ 4_0_
53

54 The accelerating cavity of the Racetrack Microtron Eindhoven
l-t--~-·-·-· ..... ·-·-·----1·-t
Figure 4.1: Schematic representation of a repetitive section of the cavity. This section is used
both for the numerical design and tuning measurements. The arrows indicate the direction and
magnitude of the fields in the 7r /2-mode at a certain time.
The power necessary to accelerate e.g. a 7 .5 mA beam all the way through the microtron equals 0.5 MW, meaning that at most 1.3 MW can be dissipated by the cavity. With eq. A.5 the required shunt impedance is found: Rsh = 20 Mn, or reff = 40 MO/m, a figure readily achieved by both travelling and standîng wave structures. Since we already have some experience with the design and fabrication of standing wave structures [2], we opted fora standing wave structure.
StÇtnding wave structures can be built both with symmetrically or asymmetrically placed coupling cells [3] [4] [5]. The structures with symmetrically placed coupling cells are prefered for ease of fabrication and the lower number of brazing cycles. Given this only two options are left: an on-axis or off-axis coupled structure. The diameter of the first one being smaller and the fact that only a modest beam current has to be accelerated, the obvious choice is an on-axis coupled standing wave structure.
4.1.2 Design strategy For a bi-periodic chain of accelerating and coupling cells operating in the 7r /2-mode almost all the energy will be stored in the accelerating cells in the ideal case. Therefore one is relatively free to shape the coupling cells, so that one is able to optimise the parameters of the accelerating cells.
Fig. 4.1 shows a repetitive section in the RTME cavity, consisting of two half accelerating cells and a full coupling cell. The terminating planes are symmetry planes for the structure and the electric field pattern. These symmetry conditions

N umerical design 55
are used to calculate numerically the mode frequencies (w0 ,w11";2 ,w11") of this short chain of cells. These numerical results are used as input for the bi-periodic dispersion relation (eq. 3.9), which yields a set of three equations for three unknown variables (kaa = kcc = 0): Wa,Wc and kac [6]. Solving this set of equations gives:
{
Wa = W7r/2
( )
-1/2 w - ...L _!..__ 1
c - w2 + w2 ~ 0 7r 7r/2
w4 1/2 k - - 1 - rr/2
ac - ( w2w2 +w2 w2 -w2w2) 0 7r /2 1r /2 7r 0 '11'
( 4.1)
The sign of kac is determined by the type of structure. For the on-axis coupled structure it is negative, see also section 3.1.2. Note that we have identified the even and odd cells with the accelerating and coupling cells, respectively. This is valid for every accelerating structure that has its symmetry planes in the accelerating cells.
The three mode resonant frequencies in eq. 4.1 can be calculated with a three dimensional (3D) computer code, which means that three important parameters of the accelerating structure can be derived. Before doing so, a 2D computer code will be used to find the optimised shape of the individual cell resonators, a combination of both codes will be used to improve the 3D design, see section 4.2.
If the structure is actually built, the resonant frequency of the different cells will vary. As is known from section 3.3.3 this will cause field in the coupling cells and differences in the field strengths in the accelerating cells. Due to the pancakelike shape, fields in the coupling cells can give cause to electron multipacting, see sec. 4.3.1. In section 4.3.3 therefore will be analysed what the allowable deviations in the resonant frequencies of the individual resonators are. Once the tolerances are set, the structure can actually be built. In section 4.4 the mechanical fabrication of the structure is described. Section 4.5 describes the tuning procedure of the total structure and the adjustment of the coupling iris in order to provide the correct coupling ratio between accelerator and waveguide. Finally in section 4.6 the measured parameters of the structure are presented.
4.2 Numerical design
Since it is not possible to calculate the electric fields and related parameters in the enclosure of the complex shaped resonators analytically, we use computer programs to solve Maxwell's equations. A large range of programs is available for the design of the resonators in an accelerating structure [7]. Two of these codes, Superfish and Mafia, have been used extensively for the design of the accelerating structure.
4.2.1 Superfish design Superfish is a relatively simple, nowadays PC based, 2D fini te element program, that can be used to calculate cylindrically symmetrie modes in resonance structures. It

56 The accelerating cavity of the Racetrack Microtron Eindhoven
Figure 4.2; Schematic representation of the coupling and accelerating cells of the cavity. The long dashed line is the symmetry axis for the structure without coupling slots and iris. The short dashed lines indicate the position of the coupling slots. See text and tables 4.2 and 4.3 for an explanation of the symbols.
uses a discretised triangular rnesh, that is adapted to the input geornetry, to solve Maxwell's equations in the frequency domain [8]. Fig. 4.2 depicts the schema.tic lay-out of the input for the calculations. In fact only half of each cell geometry at a time is used as input, since a Dirichlet boundary condition is imposed on the electric fields at the symmetry plane in the middle of each cell. From the calculated solution of the electromagnetic field a large number of cavity parameters is determined.
The stra.tegy is now to vary the shape of and the distance between the nose cones in the accelerating cells in order to optimise the effective shunt impedance and transit time factor. The resonant frequency is kept constant by adapting the maximum dimension llo of the cavity. The number of degrees of freedom seems qui te large. However, most of them are dictated beforehand by the desire for maximum shunt impedance [3] [9]. Table 4.2 lists the optimised accelerating cell parameters. The resonant frequency is higher than the operating frequency to account for the effect of the coupling slots, see section 4.2.3.
The design of the pancake like coupling cells is straightforward: we only have to optimise the resonant frequency to the design value under a few geometrical constraints, see table 4.3.
The diff erences between Superfish calculated and measured resonant frequencies of some aluminium test models of accelerating cells fabricated on a N C lathe are 5 MHz at most. For a copper test model the difference was even less than 1 MHz (~ 0.03%).

Numerical 57
Table 4.2: Superfish calculated parameters of the acce\erating cells of the RTME cavity, for an electron velocity equal to c.
geometrical parameters, dimensions in mm aperture a
outer dimension Ro radii R1,R2,R3,R4 web thickness w gap g, fiat section f length À/2 angle 0 ( degrees) figures of merit resonant frequency (MHz) unloaded quality factor Qa shunt impedance rsh (Mn/m) r/Qa (MO) e:ff. shunt impedance reff (MO/m) transit time factor T
8.0 38.5
0.5, 2.0, 2.0, 15.0 5.0
31.0, 10.0 50.0
20
3034.9 17400 135.0 229.7
79.8 0.77
Table 4.3: Relevant Superfish calculated parameters of the coupling cells of the RTME cavity.
outer dimension Re, radiusR5
thickness t figures of merit resonant frequency (MHz) unloaded factor
4.2.2 Mafia design
mm
35.0, 1.5 2.8
3480 2300
Superfish is a relatively simple and accurate program. However, since it is only 2D, it can not be used to calculate the coupling between the different cells. Therefore a fully 3D code is needed, like Mafia (Solution of Maxwell's equation by the finite integration §:lgorithm) [10]. Mafia is a 3D high potential computer code. This code can be used not only to calculate axi-symmetrical modes in an arbitrarily shaped resonance structure, but also higher order modes can be calculated. Due to its 3D character it is possible to incorporate non rotationally symmetrie elements, such as coupling slots between neighbouring cells. As a result the amount of coupling between accelerating and coupling cells can be calculated. Mafia solves Maxwell's equations on the basis of a rectangular three dimensional mesh. This implies that the description of the round shapes of the resonators is not always very precise.

58 The accelerating cavity of the Racetrack Microtron Eindhoven
Therefore the results for the resonant frequencies obtained with Mafia will differ slightly. Discrepancies between measured and calculated frequencies can be as large as 1 - 2 %. We want to do better for the design.
4.2.3 Combining Superfish and Mafia For the design of the bi-periodic accelerating structure we have the availability of an accurate 2D code and a less accurate 3D code. For an accurate 3D-design the two codes are combined as follows:
1. Cakulate with Superfish the optimum geometries of the accelerating and coupling cells at the design frequency of 2998 MHz;
2. Recalculate the geometries with Mafia, this yields resonant frequencies fa and fc for the accelerating and coupling cells, respectively;
3. Implement the coupling slots in the Mafia calculations. Solving Maxwell's equations in the coupled structure yields three mode frequencies. Use these frequencies in eq. 4.1 to find the new resonant frequencies of the accelerating and coupling cells and the couplîng constant. By comparison with the previous Mafia run, two frequency differences, l:::i.f a and l:::i.fc, for the accelerating and coupling cells respectively are found;
4. Re-design the two cells with Superfish for the frequencies (/8" = 2998 + l:::i.f") MHz and Usc = 2998 + l:::i.fc) MHz, by varying the distance between the nose cones (accelerating cells) or by adjusting the outer diameter (ooupling cells);
5. Repeat steps two and three for the newly found dimensions of the resonators: We find new va.lues for l:::i.fa and l:::i.fci
6. Calculate the resonant frequencies and the coupling constant again. If the conditions given by point 4 are validated within a MHz and the ooupling constant satisfies our demands (sec 4.3.2), we are finished. If not so, start again at point 4. If the coupling constant is not correct we have to adjust the dimensions of the coupling slot and start again at point 2.
Although this method may seem complicated, the results obtained with this method are good as is known from the literature [1:1.]. This has also been verified experimentally with an aluminium test model [12].
Table 4.4 lists the results of the design method for the cavity of the microtron. A safety margin of 10 MHz for the accelerating and 60 MHz for the coupling cells was taken into account, because it was thought that it is more easy to adjust the frequency of a cell down than up. The table points out that with the combination of the computer codes a good guess for the dimensions of the cells is obtained. But also that we have to do additional tuning after fabrication of the individual parts.
Coupling slots In the on-axis coupled type of accelerating structure the coupling between accelerating and coupling cells is provided by coupling slots in the common

tolerances 59
Table 4.4: Results of the combined program design method, all frequencies in MHz.
calculated /::,.fa 26 !::,.Je 420 kac (%) -4.6 Îsa 3034.9 Îca 3480
measured /::,.fa 27.4 !::,.Je 450 kac (%) -4.61 fa 3007.6
3030
walls. Each cell is coupled to its neighbouring cells via a pair of kidney-like shaped slots (see fig. 4.4), placed diametrally with respect to the accelerating axis. The orientation of the coupling slots in both walls of a cell is conserved within each accelerating cell, whereas it is adjusted by 90 degrees in the coupling cells, thereby minimising the direct coupling between accelerating cells and providing optimised focusing properties of the structure [13].
Due to their kidney-like shape it is not possible to incorporate the exact geometry of the coupling slots in the Mafia calculations. Therefore the geometry of the slots in the calculations is approximated by a rectangle. The area and width of the slots in the calculations is kept equal to the values of the actual slots. The width of the slots is fixed at 6 mm, since according to literature a larger width does not enlarge the coupling constant appreciably [3]. For this width the second order coupling constants ka.a and kcc are small compared to the first order coupling constant kac· The maximum opening angle of the slots is approximately 53.5 degrees, where the corners have been rounded with a radius of 3 mm. The distance between the center of the coupling slot and the axis is 25.5 mm.
4.3 Setting tolerances
From the analysis in section 3.3 it is known that differences in the resonant frequencies of the individual cells will cause field in the coupling cells and different field strengths in the accelerating cells. First an estimation for the maximum allowable field strengths in the coupling cells in order to avoid multipacting will be made. Then the optimum value for the coupling constant kac will be determined. By solving the coupled circuit equations (see ch. 3) nurnerically and allowing perturbations in the cavity parameters an estimation for the demands on the resonant frequencies of the different cells is obtained.

60 The accelerating cavity of the Racetrack Microtron Eindhoven
4.3.1 Multipacting Multipacting is a secondary electron resonance mechanism, which is under appropriate dynamical conditions a high-frequency breakdown mechanism. In the accelerating structure of the racetrack microtron the two parallel walls of the coupling cells can be regarded as electrodes. If an electron, which is freed from one electrode, is accelerated by the electric field and hits the opposite electrode after an odd number of half RF periods and frees more than one secondary electron~ an electron avalanche is started, resulting in a breakdown of the RF field.
The resonance condition for the electric field strength E for this two electrode multipacting is given by the approximated expression [14]:
(4.2)
where f is the resonant frequency, t the thickness of the coupling cells ( electrode separation), e/m the ratio of electron charge and mass and tPn a mode parameter given by
1Pn = (~ ~ D (2n -1)11' cos<ft + 2sin4>, (4.3)
n = 1, 2, 3, ... is the mode index, kis the assumed constant ratio of electron arrival to emission velocity and 4> is the secondary electron starting phase. For n = 1 this formula has been verified by a well documented experiment, where for k -t oo the agreement between theory and experiment is best [15] 1.
The maximum value of <l.>n gives the lower limit of E, fot the n = 1 mode this yields for the coupling cells of the RTME cavity a lower limit for multipacting of E = 1.6 MV/m.
Fig. 4.3 depicts a simulation of the mode vector in the RTME cavity. The maximum value of ~"n in the coupling cells is,...., 3.2% of the value for :'!'"n in the accelerating cells. With eq. 3.3 the maximum energy in the coupling cells is calculated to be LO .10-3 times the stored energy in the accelerating cells. A rough estimation for the electric field strength in the coupling cells by comparing its volume with that of the accelerating cells yields a maximum field strength in the coupling cells of approximately 1.6 MV /m.
During the high power testing of the cavity (no beam) no multipacting in the. structure has been observed. At a field strength of approximately 0.9 MV /m in the accelerating cells a reoccurring breakdown phenomenon was observed. However, it is not possible to link this field strength with the condition for multipacting, eq. 4.2, in the accelerating, nor in the coupling cells.
1In the paper a simplification of eq. 4.2 has been used: 11'/<l>n has been replaced by unity, thereby worsening the agreement between theory and experiment. If eq. 4.2 is used, the agreement is excellent.

to Ier an ces 61
4.3.2 Determination of the coupling constant The larger the coupling constant for the coupling between the accelerating and coupling cells, the larger the drop in shunt impedance and therefore the larger the ohmic losses will be. From literature it is known that every percent of coupling constant implies a loss of 3- 5.5% in shunt impedance (16] (17]. This would suggest that one wants to keep the coupling constants as small as possible. However, there are some other arguments that limit the minimum value of the coupling constant.
The cavity of the microtron is powered by a magnetron, which during its start up displays a rapid swing in resonant frequency. In order to avoid that one of the non accelerating modes is triggered, the mode separation in the cavity must be approximately 20 MHz [18]. If the accelerating structure is fed from the middle cell, only the even modes can be triggered, this implies that in effect the mode separation around </> = '1!" /2 is about doubled. To be able to power the structure from the middle accelerating cell, the number of accelera.ting cells has to be odd. With the limita.tion
· on the length in table 4.1, the maximum number of accelerating cells is 9. With the expression for </> in section 3.2.2 the neighbouring modes of the rr /2-
mode now are the 7rr/18 and 11'1T"/18-modes. With eq. 3.7 the minimum value for the coupling constant is given by lkacl 2 3.9%.
Due to ohmic losses in the structure the field strength decrea.ses a.way from the power feed, as is indicated by eq. 3.41. Accepting a decrease of 1 % in field strength implies lkacl 2 2.0% for n = 4, where the feed is assumed to be in the middle cell.
As a safe value for the design we choose ka,c -4.5%.
Coupling ratio Once the amount of coupling between accelerating and coupling cells has been determined the required coupling ratio /3 can be calculated.
A coupling constant of 4.5% yields a decrease in shunt impedance of approximately 20 %. The Superfish cakulated value for r ef f (tab. 4.2.1) is then corrected to 63.8 M!1/m. For the RTME cavity (L 0.45 m) this implies a dissipated power of 0.90 MW, together with a beam dissipated power of 0.5 MW this yields a coupling ratio j3 = 1.6, with eq. A.14.
Kilpatrick field limit Now that the length of the structure ha.s been determined, we have to verif y that the maximum field strength on the surface does not exceed the value above which successive field breakdown by sparking is likely to occur.
An estirnation for this breakdown value was formula.ted by Kilpatrick with the following empirica} formula [3]:
(4.4)
where fis the frequency in MHz and Ethe surface electric field strength in MV /m. For f 3000 MHz this yields a field of~ 47 MV /m. Below a pressure of 10-6 mbar this value seems pressure independent.

62 The accelerating cavity of the Racetrack Microtron Eindhoven
Although this value was originally formulated as a limit, a lot of accelerators are operated with surface field strengths above the value predicted by the formula. Varian e.g. operates their routinely fabricated medical linacs at a maximum field strength of approximately 55 MV /m, corresponding with 1.2 times the Kilpatrick field limit at 2856 MHz [19]. So the Kilpatrick field limit can be considered to be a rather conservative limit. With Superfish the maximum field strength for the 9 cell RTME cavity was found to be 45 MV /m and should therefore not cause any problems.
4.3.3 Determination of the required tuning accuracies Tuning an accelerating cavity can be a tedious job, hut an accelerating structure that is not perfectly tuned will genera.te unwanted phase shifts and will have varying field amplitudes in the accelerating cells and fields in the coupling cells, section 3.3.2. This means that it is important to make in advance an estimation of the permitted tolerances on the tuning parameters; 8 fa ( n) ( variations in fa), 8 f c( n) ( variations in fa), the stopband bWs and coupling coefficients.
To investigate the influence of losses, drives and tuning parameters on the mode vector ?ifJ we numerically solve the coupled resonator equations including losses and drives [20]:
(4.5)
here y represents the drives
tl= [Yo, Yi, Yz, ... , Y:m]. (4.6)
and the term with j represents the losses. The matrix M represents the coupling between a cell and its nearest and next nearest neighbours ( ch. 3). Variations in the coupling coefficients are now allowed [21]. The matrix T is given by T = bnmWn, with n, m = 0, 1, ... , 2N, Wn is the radial resonant frequency of cell n. Finally the matrix Lis given by L = bnm/Qn, Qn is the quality factor of cell n.
To find a.solution for the mode vector X'1 first the homogeneous part of eq. 4.5 without losses is solved. The solution of this eigenvalue problem gives the Wq. If we assume that the influence of losses and drives on the resonant frequency is negligible (large Qn), the solution of the mode vector ?ifJ in eq. 4.5 is found by inversion:
T2 wz
q
.LT)-i _ J- y.
Wq ( 4.7)
Now it is possible to investigate for each mode the separate or combined influence of the tuning parameters, drives and lossés on the mode vector.
Note that we do not longer demand the structure to be periodic since each resonator is treated with its own parameters. We allow random variations in the

tolerances
1.2
1 x. 1
t 10
0.8
0.6
0.4
0.2
0.0 0 2 4 6 8 10 12 14 16
--> n
Figure 4.3: Absolute value of the mode vector in the 1r/2-mode for the RTME cavity. The fields
in the coupling cavities, odd cel! numbers, are multiplied by 10 Cf,..12 = 2998 MHz, Qa 6000,
Qc 1000, kac = -4.6%, kaa -0.2%, kcc = 0, N = 8, drive in cell 8, 6fa 0.5MHz, 8fc 5.0MHz, ókac = 1%, 6w, = 5.0MHz).
Table 4.5: Tuning accuracies for the cavity.
Ó fa (MHz) 0.5 lifc (MHz) 5 ów. (MHz) 5
1
cavity parameters and subsequently solve the equat.ions. Figure 4.3 depicts a typical solution for the absolute value of the mode vector in the different cells for the 7r /2-mode for reasonable values of achievable tuning accuracies, ófa(lifc) is the maximum value of a random error in the accelerating ( coupling) cells, ó k is the error in the coupling coefficient. The main contribution to the fields in the coupling cells is the loss induced term as given in eq. 3.40.
The phase shifts are not shown since the errors are negligible for the accelerating cells, and since the on-axis fields in the coupling cells are almost zero their phases are not of interest.
The differences in field strength are not more than 1 % in the accelerating cells, a tolerable value. Therefore we will adapt the indicated tolerances as demands on the tuning, see table 4.5. With Superfish, that uses the Slater perturbation theorem to estimate differences in resonant frequency due to geometrical changes, the tolerances

64 The accelerating cavity of the Racetrack Mierotroh Eindhoven
Figure 4.4: Schematic layout of the cavity of the Racetrack Microtron Eindhoven.
on the resonant frequencies for the accelerating and coupling cells can be transla.ted into geometrical demands. The demands for the a.ccelerating and coupling cells imply for example an accura.cy of "' 0.01 - 0.02 mm in the outer radius of the cells. It will ·be clear that this kind of demands on the complex geometries of the cells are hard to meet, therefore special attention has to be paid to the fabrication of the structure and the tuning procedure, as will be discussed in the next sections.
4.4 Fabrication of the cavity
Fig 4.4 depicts the schema.tic layout of the accelerating cavity of the Racetra.ck Microtron Eindhoven, that has been built at the Centra} Design and Engineering Facilities of the TUE. The 9 accelerating and 8 coupling cells are formed by stacking 18 square bricks of Oxygen Free High Conductivity Copper (OFHC-Cu). The structure is made out of OFHC-Cu, because of its low specific resistance, p = {l.74375 + 0.00393(T - 293)}10-6 0cm, and its high purity due to its fabrication process. Therefore it can be easily used to form brazed joints and as vacuum

Fabrication of the 65
envelope. For a repetitive tuning process (section 4.5) it is important that each time a
piece of the structure is clamped onto the lathe it is positioned in the same way. Therefore it was decided to cut the two cell halves in accurately fabricated square bricks and to utilise some special made tools that position the bricks in a repetitive manner. Due to the machining, stress will build up in the material, which will lead to deformation of the copper and as a consequence changes in resonant frequency once the material is heated, e.g. during the brazing process. To avoid these changes in resonant frequency a careful production sequence was adapted [22].
Since in a perfectly tuned structure there will only flow RF currents on the outer surface of the accelerating cells, it was decided to only join the two halves of the accelerating cells by brazing, whereas the two halves of the coupling cells will be joined by 2 0-rings, one placed between the cell and the cooling water channels and one placed outside the channels. Due to radiation damage these 0-rings will slowly decompose, but it is believed that this will cause no problems due to the expected limited amount of annual working hours of the injection chain.
As brazing material Ag72Pd0.2Cu21.s with a melting temperature of 780° C has been used. The nickel-plated stainless steel vacuum attachments were brazed in the same brazing cycle with the same brazing material. The resonant frequency changes of the individual accelerating cells due to the brazing were limited to ±250 kHz with an average value of -55 kHz.
The precise outer dimensions are also used to carefully align the bricks, that form the cavity, in a special ridge. Here the pieces are kept together with a force of ,..., 3000 N by a multi-spring based clamping mechanism. After constitution of the different parts in the ridge no vacuum leaks could be detected. The structure is kept vacuum at a pressure of< 10-6 mbar.
Each of the vacuum attachments implies a seeming enlargement of the cell it is in, since the electromagnetic fields will penetrate the small tubes. The maximum frequency deviation of the accelerating cells due to these holes is given by [23]:
3 H2 {) J = - Ja a µo '
Wst (4.8)
where a is the radius of the hole, H the value for the magnetic field at the location of the hole and W"t the stored energy in the cavity at resonance. Note that the ratio H2 /Wst is independent of the magnitude of H and can be calculated with Superfish. For the attachments with a radius of 5 mm the calculated decrease in the cell's resonant frequency is -1.4 MHz per hole. The measured average frequency deviation in the cells with a hole was -1.1 MHz. Since the safety margin in the design of the accelerating cells is as large as 10 MHz it was decided not to adjust the design of the cells with a hole.
In order to achieve the proper resonant frequency the temperature of the cavity is kept constant at a temperature of 34.2° C with a closed cooling water system.

66 The accelerating cavity of the Racetrack Microtron Eindhoven
Figure 4.5: Photograph of the accelerating structure of the Racetrack Microtron Eindhoven. The square bricks constitute the actual accelerating structure. Visible are the springs and the clamping mechanism on both sides of the structure, the leads for the closed cooling water system to the right, the waveguide with RF window in the middle and the vacuum manifold that is connected
via small bellows to the structure. At the position where the bellow is missing an RF pick up loop is located.
The maximum capacity of the cavity cooling system is 1000 W, calculated with the empirica! Dittus-Boelter equation [24J [25]. This 1000 W corresponds with the dissipated power in the cavity at a pulse repetition frequency of 300 Hz. Later the pulse repetition frequency was limited to 50 Hz.
Fig. 4.5 shows a photograph of the accelerating structure of the Racetrack Microtron Eindhoven.
4.5 Tuning of the cavity
In section 4.3.3 the tolerances on the frequencies for the accelerating and coupling cells are derived. It is not possible to meet these demands directly during the fabrication. Moreover, we incorporated a safety margin in the design of the cells.

67
Therefore we have to adjust the frequency of the different cell parts after fabrication. This process is called the tuning of the cavity.
Tuning frequency It was decided to operate the accelerating cavity of the Racetrack Microtron Eindhoven at a working temperature of approximately 35° C (Tw = 308 K). At this temperature the resonant frequency of the cavity must be equal to the optimum operating frequency of the linear accelerator: 2998.3 MHz. The measurements for the tuning procedure have to be corrected for changes in size of the cells due to differences in temperature and the difference in Er between vacuum and normal air pressure [26]. It was decided not to correct for the minor infiuence of air humidity on the frequency.
The tuning frequency ftun is given by:
ftun[MHz] = 2998.3 + 0.0495(Tw Tau) ( 1 - ~) fa[MHz]. ( 4.9)
For a pressure p = 1 bar and a copper temperature Tau = 298 K, the last term equals -0.95 MHz. After the completion of the structure a frequency shift of -0.937 MHz between the structure at atmospheric pressure and the structure under vacuum (p = 3 · 10-6 mbar) has been measured. The measured infiuence of the temper at ure on the resonant frequency was (-0.050 ± 0.005) MHz/K.
For the measurernents the parts are mainly stacked in sets of 2 and 4, terminated with bi-secting planes forming respectively 3 and 5 coupled resonators with 3 and 5 mode frequencies.
When the numbered are measured in pairs of 2, with eq. 4.1 frorn the 3 measured mode frequencies the resonant frequencies wa (w1f;2 ) and Wc and the coupling constant kac are established. By forming different cornbinations of parts it is possible to determine the individual r. /2-mode resonant frequencies of the parts.
When a set of 4 parts is stacked together, the 5 coupled resonators yield 5 mode frequencies. With a fit to the dispersion relation for a bi-periodic chain it is possible to deterrnine Wa and Wc, kac and the direct coupling constant kaa, the second direct coupling constant kcc has been put zero. Since kcc is much smaller than kaa for the on-axis coupled bi-periodic structure, this approximation is allowed.
In two steps the radius of the coupling cells is increased from 35 mm to the final value of 35.5 mm. Measurements pointed out that the resonant frequencies of the coupling cells after these adjustments are equal within a few MHz, thereby satisfying the tuning demand in table 4.5.
The initial frequencies of the accelerating cells are too high, therefore they are brought down in frequency by an enlargernent of the volume. This is clone by enlarging the flat section f (fig. 4.2) and simultaneously adjusting the radius R4 •
According to Superfish an enlargement off by 0.2 mm (R4 decreases by 0.1 mm)

68 The accelerating cavity of the Racetrack Microtron Eindhoven
should yield a frequency shift of -2.2 MHz/O.lmm. Measurements on cells yield a value of (-2.4 ± 0.1) MHz/O.lmm.
The frequencies of the individual parts were determined by multiple measurements of the parts in pairs. All the parts, except the 2 terminating ones and the 2 middle ones, that will house the iris are tuned this way to the tuning frequency. After this tuning procedure the resonant frequencies of the accelerating cells were scattered around the tuning frequency within a band of ±0.2 MHz, thereby satisfying the tuning demand in table 4.5.
For the tuning of the end parts they are stacked with their two tuned nearest neighbour parts. This structure is covered with a plate and therefore is terminated with a full and a half end cell. The 1T' /2-mode resonant frequency of this short structure is tuned to the tuning frequency by adjusting the frequency of the two end parts.
After fabrication of the coupling iris, the frequency of the middle cell was determined by stacking it with another already properly tuned pair of parts and subsequently determining the resonant frequency of the middle cell. Due to the effect of the coupling iris the resonant frequency of the middle cell was initially lower than the tuning frequency. The frequency was adjusted by an enlargement of the gap between the nose cones by approximately 0.5 mm.
After the brazing of the cells, the 1T' /2-mode frequency of the complete structure at 25° C is 2997.8 MHz, only 0.04 MHz below the tuning frequency. The difference between the lowest and highest accelerating cell frequency is not more than 0.55 MHz.
Coupling 1r1s The dimensions of the coupling iris between accelerating structure and waveguide were determined iteratively by successive measurements of the voltage reflection coefficient at the iris. The relation between the measured voltage reflection coefficient (VSWR = Voltage Standing Wave Ratio) and the coupling ratio f3 is given by [27]:
{ f3 = 1/VSWR if f3 < 1, or under coupled f3 = VSWR if f3 :'.:: 1, or over coupled .
( 4.10)
The dependence of f3 on the dimensions of the coupling iris is given by Gao [28]:
(4.11)
where
• eo (1 -1Vli)112, where
• 212 is the width of the coupling iris, and

Measured
3.10
r,; (rad/s)
t
3.05
3.00
2.95
2.90 0.00 0.25 0.50
/ /
/
0.75
69
1.00
-> q, (rr rad)
Figure 4.6: The measured dispersion relation of the cavity of the Racetrack Microtron Eindhoven.
The squares denote the measured mode frequencies, the solid line represents the best fit of these
data to the bi-periodic dispersion relation.
• li S / 7f l2 if S is the surface of the iris.
Using eq. 4.11 the dimensions of the îris are adjusted in several steps to their final values of 29 mm long and 9 mm wide. The corners have been rounded with a radius of 4.5 mm. The measured coupling ratio for this iris before brazing was f3 = 1.6. After brazing the measured f3 equals 2.35. This value is too large. This mistake is due to the fact that we did not take into account that due to the brazing the losses in the structure decrease, since the electrical contact between the two cavity halves is better than before brazing. Fig. 4.9 indicates that this wrong value for ,8 is not disastrous.
4.6 Measured parameters
Fig. 4.6 depicts the measured dispersion relation of the 17 cell cavity. The squares denote the resonant frequencies of the individual modes, the solid line is the least square fit of the dispersion relation for a bi-periodic chain to the measured data. The results of this fit are listed amongst other data in table 4.6.
The field profile of the accelerating 7f /2-mode has been determined by means of the perturbing ball method. The set-up for this measurement is described by Drouen in ref. [29]. A metal hall locally disturbs the electromagnetic fields which

70 The accelerating cavity of the Racetrack Microtron Eindhoven
Table 4.6: Measured and related quantities of the accelerating structure, Tcu = 298 K.
f7r/2 (MHz) 2998.70 8w. (MHz) -0.06 kac (%) -4.61 kaa (%) -0.24 Qi 4125 /3 2.35 Qo 13820 r" (µs) 0.44 rel! (Mfl/m) 62.3 R.h (MU/m) 28.1 Rsh/Qo (ü) 225.4 Peau (MW) 0.90 Pref (MW) 0.06 Pb (MW) 0.50
causes a shift in the resonant frequency of the structure according to [30J
(4.12)
where 80 = 5 mm is the diameter of the hall, W.t the stored energy in the cavity and E and H are the local magnitudes of the electric and magnetic fields, respectively. At the cavity axis the magnetic field term can be neglected with respect to the electric field term. By moving the structure, that is placed on a translation table, along the hall the electric field strength as a function of the position in the cavity is determined.
Fig. 4. 7 depicts the measured electric field profile in the RTME cavity. The standard deviation in the measured amplitudes equals 1 %, indicating that the structure is properly tuned. It is not possible to quantify the magnitude of the electric fields in the coupling cells.
From the field profile calculated with Superfish the Fourier coefficients in the Floquet series expansion in eq. 2.38 can be calculated. Tab. 4. 7 [31] lists the results. Since for a standing wave structure an = a-(n+l) in the table only the positive terms are listed.
From the measured field profile the shunt impedance Rs of the structure is calculated [2]:
4Qo [ 1L}.f11/2 l 2 R. = 'll"eowo85 j To ds ' (4.13)
yielding a shunt impedance R. 28.1 Mn, which gives rel! = 62.3 Mfl/m: 78% of

L2
E (a.u.)
t 1.0 1\ n 1 l
0.8 1 1
0.6
0.4
1 i 0.2 \
1 w 0.0
-0.2 ~"._ ~~······
0 50 100 ISO 200 250 300 350 400 450 500
-> position z (mm)
Figure 4. 7: The measured electi:ic field profile in the cavity of the Racetrack Microtron Eindhoven.
Table 4. 7: The Fourier coefficients in the Floquet series for the accelerating cavity of RTME. The unlisted even coefficients equal zero.
n
2 -4.48 . 10-2
4 -7.51. 10-2
6 2.70. 10-2
the value calculated with Superfish. With this measured effective shunt impedance the dissipated power in the cavity is calculated, see table 4.6.
High power test Fig. 4.8 depicts the measured incident (generator) and reflected power at the cavity, as well as the power built up in the cavity. This measurement has been performed with the experiment set up depicted in fig. 5.5, where the second magnetron M2 has been replaced by the cavity.
In fig. 4.8.b in steady state approximately 14% of the incident power at the cavity is reftected. In very good agreement with eq. A.13, which yields an amount of 15% of the incident power that is reftected.
At most as much as 1.6 MW generator power was sent to the cavity, yielding an energy increase L::,.E = 6.1 MeV, meaning operation at a maximum surface field strength of 1.17 times the Kilpatrick field limit. At this field strength hardly any voltage breakdowns occurred. Above this field strength numerous breakdowns

72 The accelerating cavity of the Racetrack Microtron Eindhoven
P,.(MW) ts,-------~-----------t
1.0
0.5
P"1(MW) 1.s ,------··---~---~···~-------,
t 1.0
P ~,(MW) 1.s ,--------~------------, t
1.0
0.5
Figure 4.8: a) Incident, b) reflected and c) power built up .in the accelerating structure of the Racetrack Microtron Eindhoven.
occurred.
4. 7 Concluding remarks
With eqs. A.11 and A.13 the required generator power and reflected power (respectively Pgen and Pref) for the cavity can be calculated as a function of the energy gain and beam current, see fig. 4.9. The energy gain t:::..E = 5 MeV in the figure corresponds to the proposed 10 75 Me V mode of operation for the microtron. The energy gain range of 3 - 5 Me V is of particular interest since it corresponds with all possible modes of operation of the microtron, that can be realised with the present injector linac, which is designed to deliver an electron beam in the range from 6 -10 MeV.
The low and high power tests point out that the structure is prope:dy tuned and is able to accelerate the electron beam by as much as 6.1 MeV per passage. At this energy gain, or any other energy gain between 0.5 and 6.1 MeV, no sign of multipacting was observed, whereas the theory in section 4.3.1 predicts a multipacting resonance in the coupling cells at t:::..E = 5.0 Me V. However, the uncertainties in this prediction are numerous and large.
From the tests it can be conduded tha.t the accelerating structure lives up to the demands and it is expected that it will function well as accelerating structure for the Racetrack Microtron Eindhoven

References
1.75
P (MW)
t 1.50
1.25
1.00
0.75
0.50 ~·
0.25
0.00 3.0
- ...
---3.5 4.0 4.5
10P...,
5.0
-> .l!.E (MeV)
Figure 4.9: The required generator power and 10 times the accompanying reflected power at the
cavity as a function of the energy gain per passage, for 3 different single pass beam currents: 10.0
mA (- - -), 7.5 mA 5.0 mA (- · · · ·).
References
[1] Webers G.A., Design of an electron-optical system for a 75 Me V racetrack microtron, Ph.D. Thesis, Eindhoven University of Technology (1994).
[2] Kleeven W.J.G.M., Botman J.LM., Coppens J.E" Delhez J.L., Hagedoorn H.L., Heide J.A. van der, Knoben M.H.M" Leeuw R.W. de, Timmermans C.J., Bouman A.F.M., Verschuur J.W.J., The accelerating cavity of the TEUFEL racetrack microlïon, Proc. Eur. Part. Acc. Conf. London (1994) 2095-2097.
[3] Scriber S.O" Accelerator structure development for room-temperature linacs, IEEE Trans. Nucl. Sci. Vol. NS-28, no. 3 (1981) 3440-3444.
[4] Leeuw R.W. de, Coppens J.E., Linear standing wave accelerators in the gigahertz regime, Tijdschrift Nederlands Electronica- en Radiogenootschap, vol. 59, no. 4 (1994) 151-159.
[5] Leeuw R.W. de, Botman J.I.M., Coupled cavity modelling for the side coupled cavity linac of the European spallation source, lnternal ESS report, ESS 95-22-L (1995).
[6] Norlin B., Equivalent circuit and numerical simulation of a S cell biperiodic accelerator structure, Eindhoven University of Technology, Internal report VDF /NK 93-15 (1993).
[7] Los Alamos Accelerator Code Group, A compendium of computer codes used in particle accelerator design and analysis, AIP Conf. Proc. 184 (1989) 1137-1326.

74 The accelerating cavity of the Racetrack Microtron Eindhoven
[8] Superfish, Reference manual, Los Alamos Accelerator Code Group, Los Alamos National Laboratory, Los Alamos, USA (1987).
[9] Jameson R.A. (ed.), Sealing and optimization in high-intensity linear accelerators, LANL report no. LA-CP-91-272 (1991), and, Progress toward sealing and optimization criteria for high-intensity low-beam-loss RF linacs, LANL report no. LA-CP-92-221 (1992).
[10] The Mafia collaboration, Mafia user guide (1989).
[11] Chang C.R., Yao C.G., Swenson D.A" Funk L.W" Computer simulations and cold model testing of CCL cavities, Proc. Part. Acc. Conf. Washington (1993) 812-814.
[12] Coppens J .E., Design study for the accelerating cavity of the racetrack microtron Eindhoven, Internal report VDF /NK 94-18, M.Sc. Thesis, Eindhoven University of Technology (1994).
[13] Schrage D.L" Young L.M" Aikin D.J., Clark W.L" DePaula R.F" GladweUC., Martinez F.A., Naranjo A.C., Roybal P.L., Stovall J.E" University of Twente photocathode linac, Nucl. Instr. and Meth. B79 (1993) 721-725.
[14] Hatch A.J., Williams H.B., Multi-pacting modes of high-frequency gaseous breakdown, Phys. Rev., vol. 112, no. 3 (1958) 681-685.
[15] Proch D., Einfeld D., Onken R" Measurement of multi pacting currents of metal surfaces in RF fields, Proc. Part. Acc. Conf. Dallas (1995) 1776-1778.
[16] Billen J.H" Krawczyk F.L., Wood R.L., Young L.M., A new RF structure for intermediate-velocity particles, Proc. 17th Int. Linac Conf. Tsukuba, Japan (1994).
[17] Euteneuer H., Schöler H., Experiences in fabricating and testing the RF-sections of the Mainz microtron, Proc. Linac Conf. 1986, SLAG report 303 (1986) 508-511.
[18] Zavadtsev A.A., Petrov Yu.D., Sobenin N.P., Standing wave electron linac accelerating structure for technology purposes, Proc. Eur. Part. Acc. Conf. London (1994) 2173-2175.
[19] Vaguine V.A., Standing wave high gradient accelerator structure, IEEE Trans. Nucl. Sci" vol. NS-24, no. 3 (1977) 1084-1086.
[20] Foley M., Jurgens T., A numerical method for determining the coupling strengths and resonant frequencies of a nonperiodic coupled cavity linac, Proc. Part. Acc. Conf. Washington (1995) 852-854.
[21] Leeuw R.W. de, Coppens J.E., Kleeven W.J.G.M., Timmermans C.J., Botman J.l.M., Design study /or the accelerating cavity of the racetrack microtron Eindhoven, Proc. Eur. Part. Acc. Conf. London (1994), 2092-2094.

References 75
[22] Leeuw R.W. de, The accelerating cavity of the Racetrack Microtron Eindhoven, Internal Report VDF /NK 95-34, Eindhoven University of Technology (1995).
[23] Gao J., Analytical formulae for the resonant frequency changes due to opening apertures on cavity walls, Proc. Eur. Part. Acc. Conf. Berlin (1992) 865-867.
[24] Wilson L, Cavity construction techniques in CERN Accelerator School RF engineering for particle accelerators, CERN report no. 92-03 (1992).
(25] Kreith F" Bohn M.S., Principles of heat transfer 5th ed., West Publishing Company, St Paul (MN) (1993).
(26] Schöler H" Euteneuer H., Erfahrungen bei den Sektionherstellung für MAMI-B, Institut für Kernphysik, Mainz, Interne Notiz 1/86 (1986), in German.
[27] Pozar D.M" Microwave engineering, Addison Wesley Publishing Company Ine., London (1990).
[28] Gao J., A nalytical formula for the coupling coefficient /3 of a cavity-waveguide coupling system, Nucl. Instr. and Meth. A309 (1991) 5 - 10.
[29) Drouen T., Field profile measurements in aid of the accelerating structure of the Racetrack Microtron Eindhoven, Internal Report VDF /NK 95-24, Eindhoven University of Technology (1995).
[30] Maier L.C., Slater J.C., Field strength measurements in resonant cavities, J. of Appl. Phys. vol 23 (1951) 68-77.
[31] Georgsson M., Calculation of the radio frequency focusing effect by the accelerating cavity of the Racetrack Microtron Eindhoven, Internal report VDF /NK 95-12, Eindhoven University of Technology (1995).

76 The accelerating cavity of the Racetrack Microtron Eindhoven

5 The RF power set-up of the linac-racetrack microtron combination
The RF power set-up of the linac-racetrack microtron combination is described. As a cost eff ective solution it was decided to use two phase locked magnetrons to generale the power Jor the accelerating structures of both the linac and the racetrack microtron. Measurements on the frequency stability of a single magnetron are presented, also measurements regarding frequency and phase on the combination of two injection locked magnetrons are described.
5.1 Introduction
The accelerating structures of both the 10 Me V linear accelerator and the Racetrack Microtron Eindhoven operate at a resonant frequency of 2998.3 MHz. For synchronous acceleration of a bunch of electrons by both machines not only the frequencies of the two structures and its power sources have to be equal, but also a constant well defined phase relation between the two electric accelerating fields has to be assured.
A common solution to meet this demand is to generate a low power reference signal and to use one or two high power amplifiers, such as klystrons, that provide the necessary power for the accelerating structures. However, this solution is very expensive, due to the high costs of the klystrons and its (sub )systems.
A second option, that only very recently ( early 1996) became available, is the use of a high power magnetron. This magnetron is capable of delivering 10 MW of 3 GHz peak RF power at a duty cycle of 0.1 % and an efficiency as high as 70 % [1].
Another remaining option is the use of two smaller magnetrons, e.g. 2 MW each, and to obtain the fixed phase and frequency relation between the two magnetrons by injection locking: Part of the power frorn one magnetron is injected into the second magnetron, that is thereby forced to resonate at the sarne frequency as the first magnetron. lf the frequencies of the two magnetrons are equal, by definition a fixed phase relation between the two magnetrons is established.
In our case, this last option is the most cost effective solution. Due to donations by hospitals we have the availability of a number of magnetrons with their subsystems, such as modulators and pulse transformers.
If a magnetron is to be used as source of RF power for the accelerating cavity of
77

78 The RF power set-up of the linac-racetrack microtron combination
the Racetrack Microtron Eindhoven, its frequency should be sufficiently constant during a substantial part of the RF pulse. This to assure synchronous acceleration of the electrons in the microtron. In section 5.2 a measurement set-up to verify the frequency stability of a magnetron is described.
In section 5.3 an experiment regarding the injection locking of two magnetrons is described. The two magnetrons are operated in a master-slave configuration, where part of the power of one magnetron, the master, is injected into the second magnetron, the slave. By arranging that the power of the master magnetron is injected into the slave magnetron before the last one is triggered, the slave's output signal is forced to synchronise with the pre-injected master signal. In this way almost a doubling of the total synchronised available RF power is achieved.
In section 5.4 a description of the RF power set-up of the linac-racetrack microtron combination is given. This set-up uses two injection locked magnetrons for the generation of the RF power.
Finally in section 5.5 some concluding remarks are made.
5.2 Frequency stability of a magnetron
The acceptance of the Racetrack Microtron Eindhoven in the longitudinal phase plane is limited to an interval of approximately 20 deg" see sec. 7.3. The inherent frequency stability of a magnetron during the macro pulse should be so that the phase variation of the accelerating field is considerably smaller than this 20 degrees. For proper synchronous acceleration of the electron bunches by linac and microtron the phases of the two acceleràting fields also should be correlated well within this phase interval.
In this section a measurement set-up is described, that is used to determine the frequency stability of a magnetron during the macro pulse. First the set-up and the accompanying formulae are described. These formula are verified by means of a precise test signal, generated with a network analyser. Then the measured frequency stability of the magnetron that will power the accelerating structure of RTME is presented.
5.2.1 Measurement set-up By measuring the relative phase shift of a generator signal through a high Q~cavity, the frequency stability of the signal source can be established with great accuracy. Fig. 5.1 schematically depicts a measurement set-up, that discriminates on phase. To generate the required phase shift, part of the signal is send through a resonator with a relatively large QL-value and subsequently mixed with the unperturbed part of the signal.
A small portion of the power of the magnetron (typ. -50 dB) is coupled out at (I) by an inductive pick-up loop in the waveguide, that connects a magnetron with RTME's accelerating structure. At (II) a small portion of the power in the

Freq uency stability of a magnetron
magnetron
dB
1 hybrid ..+--!--.
coup Ier
digital osci l loscope
'-+---+-' 3
D
(Il)
crystal detectors
79
Figure 5.1: Schematic representation of the measurement set-up for the determination of the
frequency stability of a magnetron, see text for an explanation of the functioning of the set-up.
accelerating structure is coupled out, also by an inductive loop. By means of the variable attenuator (dB) the signals U1 (at 1) and U2 (at 2) are equalised in amplitude at resonance, before they are connected to the hybrid coupler. The phase shifter ( </>) is used to eliminate a phase difference in the two branches. The hybrid coupler effectively mixes the two input signals from the ports 1 and 2 with a relative phase shift of 90 deg. into the two output signals at ports 3 and 4, respectively U3 and U4 •
With the signals U1 and U2 equal in magnitude the sum of the powers at the output ports 3 and 4 of the hybrid coupler is given by [2]:
+~)' wo2
(5.1)
where w0 is the radial resonant frequency of the resonator, Q L the loaded quality factor of the resonator and w the radial frequency of the generator.
Eq. 5.1 is not hard to understand since each one of the output ports of the hybrid coupler will always receive half of the total RF power frorn input port 1, while the contribution from the other input port (the one which receives its power via the

80 The RF power set-up of the linac-racetrack microtron combination
ro 4
U,2+U,' (mW)
t 8
6
4
2
0
a) U,'-U,2 (mW) 3
t 2
0
-1
-2
-3
-4 2.991 2.992 2.993 2.994 2.995 2.991 2.992 2.993 2.994 2.995
_,, "' (2n109 rad/s) _,, "' (2n109 rad/s)
Figure 5.2: a) The mea.sured (- - -) and calculated (-) sum and b) difference signals of the
powers after the hybrid coupler, w0 5.98611'109 rad/s and QL = 10000.
cavity) depends on the radial frequency of the source, the resonant frequency of the cavity and on the quality factor, cf. eq. A.23.
At resonance the phase shift between the applied signal to the cavity and the built up oscillation in the cavity is Î rad. By assuring that the phase shift through the branch without cavity also equals ~" the difference signal after the coupler is given by [2]:
(5.2)
where 0 = 7f for W < Wo and 0 = Ü for W > Wo.
Test measurement. In order to verify the formula in eqs. 5.1 and 5.2 and the measurement set-up a test experiment has been performed. A signal source is used and the signal is divided into two equal parts by means of a power divider. One half of the power is sent through a low power resonator and the other half via the branch with the phase shifter and the attenuator to the hybrid coupler.
This adapted set-up has been used for a verification experiment, where a vector network analyzer followed by a TWT-amplifier served as precise, in frequency

81 Injection locking of two EEV M5125 magnetrons ~~~~~~~~~~~~~~~~
adjustable signal source. Fig. 5.2 shows the measured and with eqs. 5.1 and 5.2 calculated sum and difference signals of the powers directly after the hybrid as a function of the frequency offered by the network analyser.
The powers have been determined by means of a matched and calibrated pair of crystal detectors [3]. The agreement between theory and experiment is excellent in the region that is of interest to us, where the derivative of the signal in fig. 5.2.b with respect to frequency is maxima!. The discrepancy at the other frequencies is believed to be due to mismatches between cable and crystal detectors. In later experiments, this was solved by the use of isolators just before the hybrid coupler, to avoid the generation of standing waves on the lines.
In the following the measured power difference at the two output ports of the hybrid coupler will be translated into frequency differences by means of the linear part in the curve in fig. 5.2.b, that is described by eq. 5.2.
5.2.2 Results Fig. 5.3 depicts the results of the measurement of the frequency stability of an EEV M5125 2MW magnetron 1 , by means of the set-up described in the previous section, which is depicted in fig. 5.1. As resonator RTME's accelerating structure with a QLvalue of 4125 and resonant frequency w0 = 2998. 7 MHz has been used, see ch. 4. The signals over the crystals at the output ports of the hybrîd coupler have been digitised by means of a digîtal oscilloscope and transferred to a PC, where they have been translated into powers by means of the known calibration curves [3]. With eq. 5.2 the power differences have been translated into frequency dîfferences.
Over a sufficiently large part of the total macro pulse of approximately 3.6µs the magnetron displays no frequency variation. This stable regîon of approximately 2µs length corresponds very well wîth the l. 7 µs macro pulse length of the linear accelerator. The total orbit length of approximately 35 meters of RTME corresponds with a total transit time for a bunch of electrons in the machine of O.lµs.
The conclusion is that a magnetron can be used as a source of RF power for the Racetrack Microtron Eindhoven.
Sometîmes a high quality load is used to stabilise the output signaJ of a magnetron [4]. Since the inherent frequency stabilîty of the EEV M5125 magnetron is excellent, no external loading is necessary.
5.3 lnjection locking of two EEV M5125 magnetrons
In this section an experiment regarding the injection locking of two cornmercially avaîlable EEV M5125 pulsed magnetrons is described.
In section 5.3.1 an approximated first order description and the accompanying conditions for the injection lockîng of a magnetron will be given. The complete theory that describes the injection locking of a magnetron by another source of RF
Ltd. is the manufa.cturer of the magnetrons

82 The RF power set-up of the linac-racetrack microtron combination
120
Af (kHz)
t 80
•o
-40
-80
-120
-+ t (µs)
Figure 5.3: The measured frequency variation over the macro pulse of the magnetron that powers
the cavity of the Racetrack Microtron Eindhoven, the vertical sca.le only applies between the dashed lines.
power is non linear and rather complex [5] [6] [7]. In section 5.3.2 the set-up for the injection locking experiment with two magnetrons is described. In that section also the results are discussed.
5.3.1 Injection locking conditions An injection locked oscillator is an oscillator that is forced to synchronise with an impressed locking signal. The power output, frequency and phase of an injection locked oscillator can be determined if a locking signal of known power, frequency and phase is injected and if the oscillator's operation is known as a function of its load impedance with specified de conditions [5]. This can be understood directly from the approximated differential equation of the system [8]:
d</> s ' ,1.. I dt + sm y; = w1 - w , (5.3)
where w' is the unperturbed oscillator frequency, w1 is the perturbing frequency and </> is the phase difference between the injected signal and the generated oscillation. The parameter Sis given by:
(5.4)

lnjection locldng of two EEV M5125 magnetrons 83
where PL is the locking power, Po is the oscillator output power, w0 is the resonant mode frequency and Q ext is the loading effect of the matched load.
In case of a stable loek-in d</>/ dt = 0 and the steady state solution is given by:
. (Wt W1
) </> = arcsm S . (5.5)
From this last equation the condition for synchronisation is found:
1 fi;L Wo lw1-w1:; ---, Po Qext
(5.6)
with the accompanying synchronisation bandwidth:
(5.7)
Eq. 5.3 indicates that when the locking signal is suddenly applied to the steady state oscillator the so called pull-in is not instantaneous, hut occurs with a time constant:
Tp (5.8)
From experiments on the MIT linear accelerator [4] it is known that the pull-in transient time constant as given in eq. 5.8 decreases if the locking signal is switched on before the slave oscillator [9].
The various magnetron parameters to be used as input for these calculations are listed in tab. 5.1.
5.3.2 Injection locking experiment In literature a number of locking schemes for two or more pulsed magnetrons have been proposed, using e.g. magie T's to couple the magnetrons directly [9]. However, for later use as RF power sources in the accelerator injection chain we want to be able to operate the magnetrons in a master-slave configuration. This configuration has the advantage that by controlling the frequency of the master magnetron the frequency of both magnetrons is controlled, as opposed to a direct locking scheme where both magnetrons determine the output frequency.
Fig. 5.4 depicts a schematic representation of the set-up for the two magnetron locking experiment, together with the detection circuit.
Magnetron 1, the master, delivers its power via an isolator to port 1 of a circulator. Via the first output port, port 2, of the circulator, the power reaches an ER-tuner: a magie T with movable plungers in the E- and H-waveguide arms. By adjusting the position of the plunger in the H-waveguide arm part of the power

84 The RF power set-up of the linac-racetrack microtron combination
magnetron 1
magnetron 2
cavîty
digital oscilloscope
Figure 5.4: Schematic representation of the set-up for the injection locking experiment with two
magnetrons.
is refl.ected back towards the circulator. The rest of the power is absorbed in the matched load after the EH-tuner. The power that is refl.ected back towards the circulator is delivered via port 3 to magnetron 2, the slave. The output power from this magnetron is delivered via ports 3 (input) and 4 (output) of the circulator to a. second matched load.
By means of two directional pick-ups in the waveguide, part of the power from magnetron 1, pick-up (I), and magnetron 2, pick-up (II) is coupled out of the waveguide and is used as input for the sa.me frequency detection set-up as used in sec. 5.2.
Both magnetrons have their own high voltage power set-ups, with as main components a pulse forming network (PFN), a thyratron tube as high voltage high current switch and a transformer. The thyratron tubes can be triggered independently, with an arbitrary time delay between them.
Fig. 5.5 depicts the measured frequency difference between the two 2 MW magnetrons in the master-slave configuration in fig. 5.4 fora locking power of 100 kW. Clearly visible is the close frequency relation between the two magnetrons for the time interval (3 - 4)µs. In fig. 5.5.b the frequency difference between 3 and 4 µs is

85 Injection locking of two EEV M5125 magnetrons -~-----------------
M (kHz) t
li</J (deg.) t
(a)
100 ~
-100
-200 ~-----'----··--~------'------·····..._ _ __,.,__ _ __J
-1 /
/
/ /
~ t (µ,s)
(b)
-2 ~-----····~~-----__J--=~-·---··--'~-------' 3.00 3.SO 4.00
~ t (µ,s)
Figure 5.5: ( a) The measured frequency difference between the two magnetrons, the vertical
scale only apIJlies between the dashed lines, (b) the integrated phase difference between the two
magnetrons over part of the pulse.
integrated into a phase difference between the two signals. When no power was sent from master towards slave no phase correlation between the two signals was found.
The frequency difference between the two free running ( unperturbed) magnetrons was as much as "'"' 1 MHz. For this particular measurement about 100 kW of RFpower from the master magnetron was send towards the slave magnetron, that is triggered,....., l.5µs after the master. See table 5.1 for timing and pulse length details.
Fora locking power of 100 kW the measured locking bandwidth is 3.8 MHz, this has been investigated by varying the free running frequency of the slave oscillator and by finding the extremes at which locking still occurred. This bandwidth of 3.8 MHz implies a Q ext ,..., 175 for the magnetron ( with eq. 5. 7). For these values the pull-in time constant, as defined in eq. 5.8 is given by Tp 0.04ps.
The output power of the slave magnetron is independent of the amount of injected locking power and equal to the running output power.
At higher locking powers (200 400 kW) the behaviour of the locking signal

86 The RF power set-up of the linac-racetrack microtron combination
between 3 and 4 µs does not change considerably, the frequency difference pattern remains the same. This is thought to be due to variations in the voltage pulse from the pulse forming network that is connected to the slave magnetron. At these higher injection powers, the pattern between 2.5 µs (where the slave is switched on) and 3 µs is smoothed. The locking angle between the two magnetrons depends on the locking power, as predicted by eq. 5.5. This equation gives a reasonable description of the dynamics.
If the frequency signal from the master oscillator is considered to be constant (sec. 5.2.2) and the oscillations are attributed solely to the slave magnetron, it is expected that the accelerating field in the linac will display phase variations of the order of a few degrees, well within the acceptance limitations of RTME.
5.4 The RF power set-up of the linac-racetrack microtron combination
Fig. 5.6 depicts the proposed lay-out of the high power RF set-up of the linacracetrack microtron combination. The accelerating structures of both the linear accelerator and the racetrack microtron are each powered by a high power magnetron. The magnetrons are synchronised by means of injection locking as described in the previous section.
The magnetron that powers the accelerating structure of the Racetrack Microtron Eindhoven operates as master in the locking scheme (magnetron 1). Part of the power of this magnetron (-10 dB or 200 kW) will be coupled out via a directional waveguide coupler. The remaining power is delivered via an attenuator, a phase shifter and an isolator to the standing wave accelerating structure.
The variable attenuator is used to control the accelerating potential in the structure. This potential will be established by injecting the linac beam into the racetrack microtron, sending it once through the cavity and by using the left-hand bending magnet as spectrometer magnet to determine the new energy of the electron beam. N ow both the precise injection energy and the accelerating potential can be derived by varying the relative phase of the field in the structure by means of the phase shifter [10].
Once the appropriate accelerating potential is established the phase relation between the accelerating fields in the linac and the microtron structure is optimised by means of the phase shifter.
Part of the power delivered to the accelera.ting structure will be reflected at the coupling iris between waveguide and structure. The amount of reflected power depends on the beam current, see sec. 4.6. To avoid that this power will be reflected back to the directionàl coupler, an isolator, located directly after the coupler, absorhs the reflected power.
A s~cond isolator, placed between the first magnetron and the directional coupler, absorbs any reflected power from the coupler and assures that this magnetron is

The RF
magnetron l
® magnetron 2
of the linac-racetrack microtron combination
directional coup Ier
@
RTME cavity
RF-window
87
Figure 5.6: Schematic representation of the RF power set-up of the linac-racetrack microtron
combination
isolated from the second magnetron. The part of the power that is coupled out by means of the directional coupler is
send via a 4-port circulator towards the second magnetron. This second magnetron serves as slave in the locking scheme. The power is
injected into the slave magnetron, before it is triggered, this way it is forced to loek onto the injected signal, as is described in the previous section.
The power from the slave magnetron is delivered, again via the 4-port circulator, to the linear accelerator. The energy of the electron beam from the linac is regulated by adapting the loading of the travelling waveguide by adjusting the current emitted by the electron gun into this waveguide.
Table 5.1 lists a number of parameters of the radio frequency high power set-up of the linac-racetrack microtron combination.
A number of control loops will be incorporated in the high power RF set-up. The frequency of the master magnetron is optimised with respect to the resonant frequency of the accelerating structure of the microtron. The optirnised frequency can be determined e.g. with the measurement set-up described in sec. 5.2.1. Since the frequency of the slave magnetron is determined solely by the injected frequency of the master magnetron, no frequency control loop on the second magnetron is

88 The RF power set-up of the linac-racetrack microtron combination
Table 5.1: Parameters of the radio frequency high power set-up.
magnetron peak power magnetron, Po (MW) repetition rate (Hz) external Q-value, Qext
resonant frequency, tunable (MHz)
power dissipated in structure (MW) power used for acceleration (MW) macro pulse duration (µs) filling time of structure (µs) delay w.r.t. magnetron of microtron (µs)
racetrack microtron power dissipated in structure (MW) power delivered to second magnetron, PL (MW) power used for acceleration (MW) macro pulse duration (µs) filling time of structure (µs)
EEV M5125 2.2
50, 150, 300 175
2992 - 3002
1.00 0.55
1.7 0.47
1.5
0.91 0.20 0.50
3.6 0.44
required. Moreover, the exact operating frequency of the linac is less critica! than the operating frequency of the standing wave structure of the microtron [U.].
The energy of the electron beam from the linear accelerator is controlled by optimising the current through a slit after the first bending magnet in the beam transport system, between linear accelerator and racetrack microtron, see ch. 7. As has been said before, the output energy of the linac is adjusted by varying the beam loading in the tra.velling waveguide.
5.5 Concluding remarks
The combination of two injection locked EEV M5125 magnetrons generates enough power for the synchronous acceleration of the electron in the accelerator injection chain of the electron storage ring EUTERPE.
Both modulator systems of the two magnetrons contain a pulse forming network (PFN) for energy storage, that is discharged via a thyratron. Due to the limited number of capacitors and inductors used in the PFN, the de voltage pulse from this network is not entirely flat. The voltage variations result in frequency variations in the output signa! of the magnetron, particularly the magnetron that powers the linac suffers from frequency variations. A simpler solution is using a large capacitor to store the energy and discharge this capacitor by means of a solid sta.te switch [12].

References 89
References
[l] Allen J" Private communications, 1996.
[2] Leeuw R.W. de, A magnetron as a source of RF power for RTME ?, Internal report VDF /NK 94-13, Eindhoven University of Technology (1994).
[3] Dukers D" Hoogvermogen testmetingen aan de versnelstructuur van het Racetrack Microtron Eindhoven, Internal Report VDF/NK 96-11, Eindhoven University of Technology (1996), in Dutch.
[4] Demos P.T., Kip A.F., Slater J.C" The M.l. T. linear electron accelerator, Journ. of AppL Phys. vol. 23, no 1 (1952) 53-65.
[5] David E.E., RF phase control in pulsed magnetrons, Proc. I.R.E. vol. 40 (1952) 669-685.
[6] Levine J.S., Benford J., Sze H., Woo W., Smith R.R, Harteneck B., Strongly coupled relativistic magnetrons for phase locked arrays, SPIE vol. 1061 (1989) 144-156.
[7] Walsh J.E" Johnston G.L., Davidson R.C., Sullivan D.J" Theory of phaselocked regenerative oscillators with nonlinear frequency-shift eff ects, SPIE vol. 1061 (1989) 161-169.
[8] Adler R., A study of locking phenomena in oscillators, Proc. I.R.E. vol. 34 (1946) 351-357.
[9] David E.E., Phasing by RF signals, in Crossed-field microwave devices, Ed. E. Okress, Academie Press, London (1961).
[10] Theuws W.H.C., Leeuw R.W. de, Gossens L.W.A.M" Spoek P.M., Botman J.I.M., Timmermans C.J., Hagedoorn H.L., Diagnostic system of the Eindhoven linac-racetrack microtron combination, Proc. Eur. Part. Acc. Conf. Barcelona (1996).
[11] Wijs M.C.J. de, The 10 MeV linac, lnternal Report VDF/NK 95-25, M.Sc. Thesis, Eindhoven University of Technology (1995).
[12] Kemper A.H., Private Communications, 1996, in Dutch.

90 TheRF of the linac-racetrack microtron combination

6 Particle dynamics in radio frequency linear accelerators
The basic concepts of linear particle motion are described. The particle motion in radio frequency linear accelerators. is described starting from the relativistic Hamiltonian. Both the electromagnetic accelerating field and a f ocusing solenoidal field are incorporated in the representation by means of their vector potentials. The resulting adiabatically treatable Hamiltonian is used to describe the particle motion in the standing wave structure of the racetrack microtron.
6.1 Introduction
The electromagnetic field pattern in both standing and travelling wave accelerators can be described in terms of a series expansion in spatial harmonies: a Floquet series (sec. 2.4.3 and sec. 4.6). Each term in the expansion has its own propagation constant. Due to these differences in propagation constants the particle dynamics in radio frequency linear accelerators are rather complicated. :.\.foreover, the energy gain per period often is quite large.
In RF linear accelerators several focusing effects occur: phase focusing in both the longitudinal and transversal phase planes, focusing due to the higher order terms in the Floquet series ( also called ponderomotive focusing [l]) and magnetic focusing due to e.g. solenoids. These focusing effects are generally treated separately for the calculation of particle dynamica! behaviour [2] [3] [4].
Here the different focusing effects will be treated in one description, as was clone originally by Hagedoorn [5] and Stas [9]. Both the electromagnetic and magnetic fields are represented by their vector potentials and are incorporated in the genera! Hamiltonian, that describes relativistic particle motion. After some transformations and manipulations this Hamiltonian can be treated adiabatically, sec. 6.2.
The final Hamiltonian can be used in several ways to describe the particle motion in RF linacs. For example it can be incorporated in a computer program. The resulting focusing action also can be described in terms of a matrix multiplication, see sec. 6.3. This last approach is followed in sec. 6.4 to calculate the transversal focusing action by the accelerating structure of the Ra.cetrack Microtron Eindhoven.
For the incorporation of the focusing solenoidal field it is necessary to describe the particle motion in cartesian coordinates. In this and the following chapters linear
91

92 Particle dynamics in radio frequency linear accelerators
particle motion is considered. Space charge effects are not taken into account. In the following section some basic concepts of linear particle motion are described.
6.1.1 Basic concepts In this section some basic concepts regarding beam dynamics, that are used in this and the following chapters are described.
coordinate systems Particle motion is described in a curvilinear coordinate system, used in chs. 7 and 8, defined with respect to the reference particle at the reference trajectory, also called optica! axis. The coordinate x corresponds with the median plane of the racetrack microtron. In case of a straight reference trajectory, e.g. in the linac, this coordinate system corresponds with the cartesian coordinate system (x, y, z) used in this chapter. The coordinate z points along the optica! axis.
In this last system the motion of each individual particle is defined by its space coordinates x, y, z and the three linear momenta (Px, Py, p"). Then the transversal divergences of the particles with respect to the reference trajectory are given by x' = dx/dz = Pxf Pz and y1 = dy/dz = py/Pz· A longitudinal 'divergence' is defined as the difference !lp between a particle's momentum and the momentum of the reference particle. In the curvilinear coordinate system similar definitions apply.
matrix multiplication The linear action of an electron optica! system on a particle is conveniently described by a matrix multiplication Tmn from the initial coordinates
to the final coordinates
by 6
Xf = L: TmnXi• m,n=1
(6.1)
(6.2)
(6.3)
emittance and acceptance The collection of all particle coordinates and divergences in a beam, i.e. an ensemble of particles with a longitudinal momentum much larger than the transversal momenta, defines a six-dimensional hypervolume. By taking the projection of this six-dimensional hypervolurne to the three twodirnensional planes (x,x'), (y,y') and (z,~p) three phase planes are formed. In these phase or trace planes beam emittances are defined. In many cases it makes sense to pass an ellipse around the positions of all particles in the phase plane and to define the emittance ex,ioo as the area of this ellipse. Often the area of the ellipse that encloses 90% of the particles ex,9o is used as a rneasure for the beam emitance.

~!Jamiltonian description of particle motion 93
In case of a strongly distorted projection the use of an ellipse is meaningless and the effective emittance has to be used instead [6]:
(6.4)
For the other phase planes similar definitions hold for and Ez.
If the particle motion is uncoupled and thus no relation between particle movements in the different phase planes exists, the value for fhe in the three individual phase planes along the path is conserved (/3 and r obey their usual definitions of scaled parti de velocity and relativistic factor).
The acceptance ax of a machine or focusing system is defined as the maximum emittance that a beam can have to fit into the available aperture.
The beam envelopes in the transversal directions along the path are given by the maximum distance of the particles in the bea.m to the optica} axis.
6.2 A Hamiltonian description of particle motion
The electromagnetic accelerating field and the focusing solenoidal field are incorporated in the Hamiltonian, that describes relativistic particle motion, by means of their vector potentials in sec. 6.2.l. For the calculation of the particle motion it is convenient if the z-coordinate is the independent parameter, instead of the timet. In sec. 6.2.2 the switch to this new independent variable is made. First the central solution for longitudinal motion contained within this new Hamiltonian is derived in sec. 6.2.3. In order to eliminate of the coupling between the different phase planes in sec. 6.2.4 two successive transformations are performed. The first one concerns phase focusing and removes the coupling between the coordinates. The second one concerns magnetic focusing and removes the coupling between coordinates and momenta in the different phase pla.nes. In order to be able to treat the Hamiltonian adiabatically the rapidly oscillating terms in the Hamiltonian are transformed away by a last transformation in sec. 6.2.5, yielding the ponderomotive focusing action in RF linear accelerators.
6.2.1 The vector potential Starting point for the study of charged particle motion in RF linear accelerators is the relativistic Hamiltonian [7]:
where cis the speed of light, the particle rest energy, e the charge, Px,py,Pz three canonical components of the momentum, <P the scalar potential and A
( Ax, Ay, Az) the vector potential.

94 Particle dynamics in radio frequency linear accelerators
The electromagnetic field in the linac ( eq. 2.1) is translated into the vector potential via E = - &a~ and 4> = 0:
00 1 k 1 Ax = L ÏanEz...!!:..-;;-J1(&nx) cos(knz -wt) (6.6)
n=-oo W Gn
Ay Ë 1 k"1 c) ( ) (6.7) = 2anEz--;;-l1 GnY cos knz - wt n=-oo W O:n
00 1 . Az = L -anEz-lo(&"r)sin(knz -wt). (6.8)
n=-oo W
For the calculation of linear motion it is sufficient when the modified Bessel functions are replaced by their small argument expanding series up to second order in the coordinates:
{6.9)
(6.10)
(6.11)
where a magnetic focusing solenoidal field is added according to V x A = B [8]. The sum E~=-oo has been replaced by the abbreviated notation En·
6.2.2 The basic Hamiltonian For the calculation of particle motion it is convenient to switch over to the z
coordinate as independent variable. Then trajectories, particle energy and phase are described as a function of position along the optica! axis. The new Hamiltonian becomes K = -Pz· Now -Hand t forma new pair of conjugated canonical variables. The new Hamiltonian reads:
(6.12)
Sealing this Hamiltonian helps to distinguish between different orders of magnitude later on. The following sealing transformation is performed:
(6.13) h = -H/H;, (=et,
H; is the initial energy.

A Hamiltonian motion 95
The result of this transformation reads:
k = {h 2 - e1 + "'l 1 2
- L.. 2,fnknxcos(knz - k() + 2,bky) + n
-(7r - "°' ~E k y cos(k z ki") - ~bkxJ' 2 } 1 1 2 + y L., 2 n n n ':., 2 n
+ L fn(l + ~a~(x2 + y2)) sin(knz - k(), (6.14)
n
with J{
(6.15) fn = b = J;~kB(z).
In this Hamiltonian the new time ( et is a canonical variable. Better notion is obtained by transforming this variable to ( = ( - This new variable has the meaning of a phase. The transformation to ( is generated by
Go - k1
(6.16) -h( - h-z k
yielding
( 8Go - k1
(6.17) oh (+kz,
h = 8Go _ h &( - ' (6.18)
and1
Ko= k + 8Go
27rn - k() + ~bky )2 + D 2
(6.19)
1 As soon as the transformation is performed the tildes above the variables are dropped.

96 Particle dynamics in radio frequency linear accelerators
For better understanding the signs of h and ( are changed by the following transformation:
yielding
( =
h =
and
_, -h,
(6.20}
(6.21)
(6.22)
Now the energy h is a positive quantity. This Hamiltonian is the starting point for the study of the focusing effects in radio frequency linear accelerators.
6.2.3 Central solutions We are interested in particles that have Vd ~Vj, their longitudinal coordinates can be described by h h0 + h and ( = (0 + (. Substitution of this perturbed solution in the Hamiltonian in eq. 6.23 and expansion of the square root in the variables x, y, 1rx>Try, (and h shows that the coupling between longitudinal and radial motion in this Hamiltonian occurs in terms of third degree and higher [9]. These higher degree terms are neglected in linear dynamics, so the motion can considered to be uncoupled.
In search for the central solutions for the longitudinal motion, first the central solution of radial motion [9]
X = Y = 1rx = 1ry = 0, (6.24)
is substituted in the Hamiltonian in eq. 6.23:
(6.25)

motion 97
The equations of (longitudinal) motion contained by this Hamiltonian read
dh 8K1 27rn dz
2:-Enkcos( Dz + kÇ), (6.26) n
d( &K1 -h k1 1 1 (6.27)
&h = +- c(- -
dz k 'Ud 'U f
For a particle with Vd = VJ the phase k( is considered to be constant. For a first order estimation of the energy h as a function of the longitudinal coordinate z, integration of eq. 6.26 and validation of the initial condition h( z 0) = 1 yields an expression for the scaled energy h:
h = ho(z)
( = (o
'°'' kD . 27rn = -&0 kz cos(k(0 ) - L.., En-2
- sm( ~D z + k(o) + 1, n 1rn
constant,
(6.28)
(6.29)
where Ln' is the I.:~~~oo, n;z!:O and the rapidly oscillating terms have been taken into account. In this derivation it is assumed that the phase velocity, represented by k1, varies only slowly with z. While performing numerical calculations ho and (o are calculated constantly along the accelerator by rneans of eqs. 6.26 and 6.27 and no limitations are imposed on k1. If the wave propagation factor depends on the position z, the propagation constant kin transformation Go and in the Hamiltonian has to be replaced by J k(z)dz.
If only the n = 0 term is considered, the well known central solution reads [4]:
h = h0 (z)
( = (o
-t:0 kzcos(k(0 ) + 1,
constant.
6.2.4 Phase focusing and magnetic focusing
(6.30)
(6.31)
In the Harniltonian in eq. 6.23 the central solution of longitudinal motion (ho, (o) is substituted:
(6.32)

98 Particle dynamics in radio frequency linear accelerators
In this Hamiltonian coupling exists between the different phase planes: 1r,,,, y and ?ry,
x are pairs of coupled variables. The coupling between these variables is resolved by a transformation that transforms the canonical momenta 1tx and 1ry into new momenta that equal the kinetic momenta. This transformation is generated by
G2 = -1rxX - 1ryY + L ~l'nkn(x2 + iJ2) cos(2;n z + k(o),
n (6.33)
yielding
(6.34)
(6.35)
similar equations for y and 7f y and
(6.36)
The square root in this Hamiltonian is expanded up to second order in the variables x, y, 7r", ?ry. Then a transformation to a coordinate system rotating around the z
axis with half the cyclotron frequency is applied. The transformation is generated by the function [8]
(6.37)
where
(6.38)
yielding
X- 8G3 . = -
8_ =xcos<p+ysm<p, 1rx
(6.39)
_ 8G3 _ _ . 1r:c = ax =1rxCOS<p-1rySlll<p, (6.40)

99
similar equations for y and if y and
(6.41)
Since the longitudinal and transversal motion are now independent, the subscript (0) for the central longitudinal motion is left out. By this last transformation the solenoidal focusing action is transformed into a slowly varying energy dependent focusing term. Due to the rotational symmetry of the total problem, this last transformation can be left out for the numerical calculation of the phase focusing effect. However, if a non-rotationally symmetrie element, such as a quadrupole, is introduced into the equations by means of its vector potential, this last transformation has to be included.
6.2.5 Focusing due to oscillating terms The Hamiltonian in eq. 6.41 contains in the third row a collection of rapidly oscillating terms, that also are present in the central solution for longitudinal motion. These oscillating terms of first order yield second order "constant" terms after their removal by a suitable canonical transformation, giving the ponderomotive action in an RF accelerator [1]. This transformation reads
{6.42)
x
similar equations for y and if y and

100 Particle dynamics in radio frequency linear accelerators
(6.43)
Where for simplicity in the derivation of the last focusing term ~h h2
is approxi-o-e R
mated by unity, implying ho~ eR or highly relativistic particles. Moreover, in the transversal part of this equation h0 is considered to be slowly varying.
The variation of the transversal focusing terms in eq. 6.44 is slow and therefore this Hamiltonian can be treated adiabatically.
6.3 Matrix representation
The Hamiltonian in eq. 6.44 can be tackled in several ways to describe the focusing action by a radio frequency linac structure. In this section the different focusing effects in the previous sections are translated into a matrix multiplication to describe the focusing action.
6.3.1 Phase focusing For the representation of phase focusing by means of a matrix, the square root in the Hamiltonian K 2 in eq. 6.36 is expanded up to quadratic terms:
.!.11"2 + .!.1!"2 k = -vh2 - eh, + J x
2 y + î'o sin(k() + f h + h2 - eh,
+l&o(x2 + y2 )(k1ko - k2) sin(k(0 ). (6.44)
In this Hamiltonian no ooupling between the different phase planes exists and therefore the equations of motion are derived separately for each phase plane. In the following only the motion in the (x, ?r") phase plane will be considered. The equations of motion in this phase plane read:
x' = (6.45)

7r' x 1 C' 'k2 -001 2 \
101
k1ko) sin(k(o)x = -wzx, (6.46)
in these equations the prime denotes differentiation with respect to zand ho is given by eq. 6.30. Both w1 and w2 are slowly varying with z and are treated adiabatically. Eqs. 6.45 and 6.46 are combined into one equation:
( 6.4 7)
this equation represents the differential equation of a harmonie oscillator. A similar equation for 1fx is obtained (9]. The genera! solution to eq. 6.47 and its equivalent for 1ix is written as a matrix multiplication:
[ x('D) ]
1ix('D) [ cos(..fWïWi,V) ; 2 sin(JW]W2V)] [ x(O) ]
- ~1 sin(JW]W2V) cos(JW]W2V) 7rx(O) :F1 [ :x(~J) ] ' (6.48)
where x(O) and 7r x(O) are the initial conditions at z = 0 and the fina1 coordinate and momentum at z V are calculated.
The mathematica! cell length V equals the physical cell length D (or the period length) only in case of a linac operating in the 7r-mode. A standing wave structure operating in the 7r /2-mode with small coupling cell length, like e.g. the accelerating structure of the racetrack microtron Eindhoven, or off-axis centred coupling cells, can be regarded as operating in the 7r-mode. For a travelling wave linac operating in the 27f /3-mode the length V corresponds with 1 t physical cells.
For the description of the focusing action of a complete linac structure the transversal momentum kick, that a particle experiences when it enters or leaves the structure must be incorporated. However, in case of a structure operating in the 7r-mode, terminated with full end cells like the accelerating structure of RTME, this effect is zero.
The total matrix multiplication for a complete linac consisting of N cells is given by
(6.49)
where :F1 ,1 symbolises the focusing by cell l. Matrix M 1 symbolises a transformation in the canonical coordinates x and 7r x· It is preferable to translate the obtained result by means of a transformation into a translation in the coordinate x and the divergence x' for a complete linac structure. This is done by using eq. 6.45: 7r x = x' / w1 . This transformation is applied before entering the structure at energy hi with w1,; and after the structure at energy h1 with wi,J· The matrices T; and ~-l belonging to this transformations read
Ti=[~ l] w1,t
(6.50)

102 Particle dynamics in radio frequency linear accelerators
With these two matricés the total matrix multiplication for ä complete linac consisting of N cells is given by
(6.51)
The determinant of M1 equals 1;/11 as should for accelerated particles.
6.3.2 Focusing due to oscillating terms The part of the final Hamiltonian that describes the focusing due to oscillating terms is given by (cf. eq. 6.44)
~ 1 2 2 k2 ( 1 2 2 ( 1 ~ 2) K1 = 2(x + y ) ha 4E0 cos k(o) + 8 !:::i(En + E-n) . (6.52)
Similarly to the previous section a matrix for this focusing action is derived [9]:
(6.53)
where 2 . k2 ( 1 2 2 1 ~ 2) n2 hg 4E0 cos (k(o) + s !:::i(En + t'-n) . (6.54)
The focusing matrix for the oscillating terms for a total linac is gîven by
(6.55)
where s and s-1 account for the effect of the transformation from canonical to cartesian variables:
8 _1 = [ a 0 ] . a'/a a
(6.56)
These matrices are found by realising that x = ax, where ais defined in eq. 6.42; the second row is found by differentiation of the first row with respect to z. Matrix S plays the role of T in the previous section. If the transformations are made outside the accelerating structure a' = 0 (a' is the derivative of a with respect to z).
6.3.3 Combining the different focusing terms The thick lens focusing matrix :F2 in eq. 6.53 can be written as a combination of three elementary matrices; a drift-lens-drift combination:
:F = [ 1 1) /2 ] [ 1 0 ] [ 1 1) /2 ] 2 o 1 -n~v 1 o 1 · (6.57)

the RTME 103
Also the focusing matrix :F1 ( eq. 6.48) can be written as a combination of three elementary matrices:
:Fz = [ 1 wJ/D/2 ] [ 1 0 ] [ 1 w1/D/2 ] . 0 1 -w2/D 1 0 1
(6.58)
For relativistic energies the drift lengths in the two expressions are almost equal, since w1,; ~ 1. Therefore the two focusing terms can be combined to
1 0 ] [ 1 'D /2 ] (n~ + Wz,i) 'IJ 1 0 1 .
(6.59)
To calculate the transversal focusing action of an accelerating structure, this last combined matrix has to be sandwiched between the entrance and exit matrices, as :F2 in eq. 6.55.
In a similar way the focusing action due to a solenoidal field can be incorporated in the total focusing matrix.
6.4 Transversal focusing by the RTME cavity
The transversal focusing action of the accelerating structure of the Racetrack Microtron Eindhoven has been calculated with three independent methods. The results are presented as coefficients in a matrix multiplication:
(6.60)
where the subscript i denotes the initial parameters and the subscript f denotes the final parameters of the particle, respectively before and after the structure.
Firstly the focusing action has been calculated by means of the particle tracking computer program Parmela. The electromagnetic fields in the cavity as calculated with the code Superfish have been used as input for these calculations. The mesh for the electromagnetic fields is roughly 0.5 x 0.5 mm2, whereas the integration step size is 1 degree. The calculated matrix coeffidents are depicted by the dotted lines in fig. 6.1 as a function of the starting phase of the particle.
Secondly a matrix for the ponderomotive focusing action in radio frequency linear accelerators, derived by Rosenzweig and Serafini in [2], has been used:
[
cos( a) - cos( k(o) sin( a) /.,.,(i(o) Jt,~ sin( a) 1 -!Jf: [)~:((:~:)) + sin(a) Jt [cos(a) + /ri(f(o) cos(k(o)sin(a)] .
( 6.61)

104 Particle dynamics in radio frequency linear accelerators
t4 .-----..,.-----,.-----,----,
a t
t2
1.0
0.8
a)
0.6 '-----'-----'--~---'-----' 0 90 180 270 360
" k(0 (deg.)
0.0 .-----....----.---~----,
c{m-~
t -0.2
-0.4
-0.6
--- ' \
-0.8 '-----'----~--~--~ 0 90 180 270 360
" k(0 {deg.)
.7 .----....----.----.----,
b(m) b)
d t
.6
.4
.3 .__ __ ....._ __ _._ __ _..... __ __,
0 1110 270 360
" k(0 (deg.)
1.4 .----..,.----,.------,..----,
d)
1.2
1.0
0.11
0.6 '----~--~--~--~ 0 180 270 360
"' k(0 {deg.)
Figure 6.1: The matrix coefficients of the transfer matrix for the standing wave accelerating structure of RTME, for an initia! kinetic energy of 10 MeV: as calculated with the computer code
Parmela ( · · · · ·), with the theory by Rosenzweig and Serafini (- - -) and with the matrices as derived
in sec. 6.3
In this matrix a is defined as
a = /rt(k(o)/8 ln [HJ] , cos(k(o) Hi
(6.62)
where Hi(f) is the initial (final) energy of the particle. The coefficients in the Floquet series expansion are incorporated via the term q(k(0 ):
00
q(k(o) = I: a! + a~n + 2ana-n cos(2k(o). (6.63} n=l
We have a0 = a_1 = 1 and neglect the higher order coefficients, since they are small, see sec. 4.6. The results obtained with this matrix are represented by the dashed lines in fig. 6.1.

References
Finally the coefficients have been calculated by means of the theory developed in this chapter. For the calculation of the focusing action of the cavity the focusing due to the oscillating terms (or ponderomotive focusing) and the phase focusing as derived in sec. 6.3.3 have been taken into account. The results of these calculation are denoted by the solid lînes in fig. 6.1.
The agreement between the results for the four coefficients from the three different methods is very good.
The numerical results presented in fig. 6.1 are the values for particles with an initial x-coordinate of 4 mm as calculated with Parmela. For k(o = 0, 180° the numerical results are almost independent of this initia! coordinate. For the other angles the value of c is stable for x; < 0.5 mm and for x; > 3 mm. The differences between the two solutions are large. Therefore, it is hard to tell the validity of the numerical calculations. In fig. 6.1.c the values for x; > 3mm are depicted.
The difference between the theoretica! results is due to the fact that in the theory by Serafini the phase focusing is not taken into account. The incorporation of this phase focusing introduces a slight asymmetry in the results with respect to k(o = 180°.
References
[1] Hartman S.C., Rosenzweig J.B., Ponderomotive focusing in axisymmetric rf linacs, Phys. Rev. E vol. 47, no.3 (1993) 2031-2037.
[2] Rosenzweig J., Serafini L., Transverse particle motion in radio-frequency linear accelerators, Phys. Rev. E vol. 49, no.2 (1994) 1599-1602.
[3] Lapostolle P.M" Septier A.L. eds., Linear Accelerators, North Holland Publishing Company, Amsterdam (1970).
[4] Le Duff J., Dynarnics and acceleration in linear structures, CERN Accelerator School report 94-01 (1992) 253-288.
[5] Hagedoorn H.L., Botman J.L~1" Leeuw R.W. de, Stas R.J.W., Orbit dynamics in a low energy electron linear accelerator, Proc. of the Eur. Part. Acc. Conf. Barcelona (1996).
[6] Reiser M" Theory and design of charged particle beams, John Wiley & Sons Ine., New York (1994).
[7] Goldstein H., Classical mechanics, Addison-Wesley Publ. Comp. Ine., London (1980).
[8] Hagedoom H.L., Botman J.I.M., Kleeven W.J.G.M., Hamiltonian theory as a tool for accelerator physicists, CERN Accelerator School report 92-01 (1992) 1-50.
[9] Stas R.J .W., Orbit dynamics in linear accelerators using Hamiltonian theory, Internal Report VDF/NK 96-18, Eindhoven University of Technology (1996).

106 Particle dynamics in radio frequency linear accelerators

7 Matching the linac to the racetrack microtron
The measured and calculated characteristics of the linac at 10 Me Vare presented. The electron beam transport system between linac and racetrack microtron is described. The system matches the emittance of the linac beam in longitudinal and transversal phase planes to the acceptance of the microtron.
7.1 Introduction
For synchronous operation of linac and racetrack microtron not only the two RF power sources have to be synchronised, as described in ch. 5, but also the transport of the linac beam to the racetrack microtron has to be arranged. This transport must assure an optimised matching of the linac beam to the acceptance of the microtron. This matching has to be performed in the longitudinal as well as the transversal phase planes. Therefore the characteristics of the linac beam have to be known. These characteristics are obtained partly via measurements, e.g. transversal emittances and energy spread, and partly via numerical simulations, e.g. the emittance in the longitudinal phase plane. The results of these measurements and simulations are described in sec. 7.2.
In sec. 7 .3 the calculated acceptances of the racetrack microtron are presented. The first bend in the racetrack microtron displays negative dispersive action.
This causes a spread of the electron beam in the longitudinal phase plane. By the choice of type of bending system, that brings the electron beam down in elevation from the linac axis to the median plane of the microtron, this negative dispersive action can be counteracted. Sec. 7.4 describes the doubly achrornatic bending system, consisting of four bending magnets only, that displays the required positive dispersive action.
In the bending section the energy spread of the electron beam is reduced by rneans of a slit system in the focus of the first bending magnet. So the longitudinal emittance of the linac beam is adapted to the microtron's acceptance by a careful design of the bending system.
The matching in the transversal phase planes is realised by rneans of a quadrupole triplet between linac and bending system, and a quadrupole doublet between bend-
107

108 Matching the linac to the racetrack microtron
1500
B (Gauss)
t 1200
900
600
300
0 0.0 0.5
\ I x.
/ " 1.0 1.5 2.0 2.5
~ s (m)
Figure 7.1: The on-axis magnetic field strength of the individual solenoids (dashed line) and the
envelope (solid line), 11 = 20 A, 12,13, /4 = 14.5 A, Ir" Ia, lr,ls = 17.5 A.
ing system and microtron. In sec. 7.5 the total beam transport line between linac and racetrack microtron is described.
In sec. 7.6 some concluding remarks are made.
7.2 Characteristics of the 10 MeV linear accelerator
For an adequate simulation of the dynamical behaviour of the electrons in the linac, the size and shape of the electric and magnetic fields along the linac have to be known. The size and shape of the accelerating electric fields is calculated and presented in sec. 2.3 and sec. 2.4.3, respectively. These results are used for the beam dynamica! simulations.
The magnetic field of the focusing solenoids (sec. 1.2.1) has been determined by measurements with a Hall-probe, see fig. 7 .1 [ 1]. In this figure the dashed lines denote the on-axis measured field strengths of the individual solenoids. The measured field of each solenoid is fit to the ideal field of a thin layer solenoid. This field in its turn is replaced by the magnetic field of 7 single loop current coils, that can be implemented as background coils in the program Parmela (Ehase .Q:nd radial motion of ~lectrons in linear _Q,ccelerators). The di:fferences between measured and fitted field envelopes is never more than a few Gauss [1].

The
0.0
of the Racetrack Microtron Eindhoven
M 8.5 9.0 9.5 10.0 1-0.5 11.0
~ energy (MeV)
t:.W (MeV)
35
.30
.25
.20
0 0
a
0 c a 0
10 15 20
-> Ar(> (deg)
109
Figure 7.2: The energy spectrum (left) and the longitudinal phase plane (right) of the linac.
The measured transversal emittances of the linac at 10 Me V will be presented in the report by Hammen [2].
7.2.1 Longitudinal characteristics Fig. 7.2 depicts the calculated and measured energy spectrum as well as the
calculated particle distribution in the longitudinal phase plane of the output beam at 10 MeV.
For the simulations an on-axis pencil beam with negligible transversal dimensions has been used as input beam. Space charge effects have not been taken into account. The energy spread measurement has been done with a 30 degree H·type bending magnet with known measured field map and transfer matrix and a slit system in the focus of the magnet. The discrepancy between measured and calculated energy spread values (3.5 % FWHM versus 1.5 % FWHM) is thought to be due to the coupling between longitudinal and transversal phase planes that has not been taken into account in the sîmulations.
7 .3 The acceptance of the Racetrack Microtron Eindhoven
In order to be able to maximise the matching between linac and racetrack microtron the acceptance of the microtron in the three phase planes has to be known. It is convenient when these acceptances are known at the same (injection) position and at the same energy. Fig. 7.3 shows the acceptances as calculated by Theuws [3]

110
z' t
-4
Matching the linac to the racetrack microtron
x' (mrad) t
HORIZONT AL
-8 '-----'----'----'----~ ~ ~-~-~--~-~ -6 -3
t:.W (MeV) t 0.1
0.0
--0.1
0 6 -6
... z (mm)
LONGITUDINAL
--0.2 '---'--.l...--'--.1...--'--.l..---'-----'
-3
-15 -10 -5 0 5 10 15 20 25
" t:.q, (deg)
0 3 6
... x (mm)
Figure 7.3: The acceptance of the Racetrack Microtron Eindhoven in the three phase planes
halfway the two dipoles at the cavity axis at an injection energy of 10 MeV, as calculated by
Theuws.
halfway the two dipoles at the cavity axis at an injection energy of 10 MeV. The cavity is assumed to be infinitely thin.
The acceptances have been obtained by numerical particle tracking: the trajectories of parti des with initial positions xo, zo and divergences x' 0 , z' 0 with respect to the central trajectory at injection are calculated. The longitudinal acceptance has been obtained in a similar way: particles with va.ried phase (!::..</>) and energy ( t::.. W) deviations are tracked through the microtron. For this tracking procedure the measured field profiles of the two bending magnets have been used. The transversal focusing action of the cavity has been taken into account by using the transfer matrix for a standing wave accelerating structure, see sec. 6.4.
The horizontal and vertical acceptances at 10 MeV are 35 mm·mrad and 85 mm·mrad respectively. The longitudinal acceptance is 1.8 deg·MeV at a cavity accelerating potential V = 5.06 MeV and a synchronous phase </>.of 9 degrees. The value for the longitudinal acceptance remains almost unchanged for 8 :::; <Ps :::; 13 degrees and -1%:::; t::..V/V:::; 4% (4].

A achromatic section 111
7 .4 A doubly achromatic bending section
For injection into the microtron the linac axis is placed approximately 40 cm above the median plane of the microtron. The beam has to be guided over one of the dipoles of RTME and has to be brought down to the median plane by a bending system. The geometrical and supplementary demands on this bending section are described in section 7.4.L The doubly achromatic bending system consisting of four bending magnets is described in section 7.4.2.
7.4.1 Demands The bending section and the transport line in total between linac and racetrack microtron should fulfil a number of demands:
• The beriding section should be doubly achromatic; a doubly achromatic electron optical system is a system that displays achromatic behaviour with respect to place as well as divergence of the particles;
• In order to match the longitudinal emittance of the electron beam to the microtron's acceptance in the longitudinal phase plane, the negative dispersive action of the first bend in the microtron has to be counteracted by positive dispersive action of the bending section;
• With a slit system the energy spread of the linac beam should be reduced to l.6.E/EI < 0.5%, being the energy acceptance of the microtron (sec. 7.3);
• The bridged height of the bending system should be about 40 cm (the microtron's dipoles rise 22.5 cm above the median plane);
• The spanned length of the bending system should not exceed 70 cm, in order to clear space for a quadrupole doublet between bending section and dipole vacuum chamber;
• The beam transport line should provide adequate focusing, steering and positioning capability in order to match the linac beam to the acceptance of the mkrotron.
7.4.2 The doubly achromatic bending section In the longitudinal phase plane ( .6.<,6, .6. W) the transfer matrix for the first bend in the microtron is given by [3]
( 1 -2.03) 0 1 '
(7.1)
(-2.03 mm/% or -7.3 degrees/%) at T = 10 MeV. Without counter measures the beam with finite energy spread would be spread out in phase, thereby diminishing the number of electrons available for injection into the racetrack microtron.
By a proper choice of doubly achromatic bending section this negative dispersive action can be counteracted. An anti-symmetrie doubly achromatic bending section

112 Matching the linac to the racetrack microtron
..___ linac
z'
- SLtD, D)
'~ '~co. D) -
1
(0, 0) z
c "'-. '~ - (LD, -PL1 D)
Figure 7.4: Lay-out of the transport line between linac and racetrack microtron and the motion in the z - z' phase plane. (In this chapter the transversal phase plane ( z, z') refers to the bending
plane of the system, the (x,x') plane to the motion perpendicular to the bending plane.)
consisting of two dipoles and a quadrupole triplet in between has negligible action in the longitudinal phase plane and therefore does not fulfil our demands [5]. However, the doubly achromatic bending section consisting of four dipoles only displays positive dispersive action. This system will be used for the transport between linac and microtron.
Fig. 7.4 shows the proposed beam transport line with the doubly achromatic bending system. Four identical homogeneous bending magnets will be used with perpendicular entrance and exit of the transversing beam.
By decomposition of the radial transfer matrix of a bending magnet in three elementary matrices the transport matrix and the positions of the principal planes are defined [6]. The distance l of the principal planes to the entrance, respectively

A achromatic section
Table 7.1: Motion in the z z' phase plane
(L1D, (L1 D,-PL1D)
(L1D 2L2PL1D,-PL1D) (L1D 2L2P LiD, P L1D)
(0,
exit of the magnet is given by l p tan </>/2, where p is the radius of curvature and </> the bending angle. The transport matrix is given by
(
1 0 0 ) M= -P 1 D ,
0 0 1 (7.2)
with focusing strength P = sin</>/ p and dispersion D = sin</>. The condition for doubly achromatîc transport can easily be given by considering
the elementary motion in the radial phase plane for a particle with unit momentum deviation, see fig. 7.4 and table 7.1 [7] [8]. Here the drift L1 extends from the principle plane position of the first (third) bending magnet M1 (M3 ) to the principal plane position of the second (fourth) bending magnet M2 (M4 ). The drift 2L2 is the distance between the principle planes of bending magnets M2 and M3 •
The first bending magnet Af1 only bas dispersive action and shifts the particle to (z, z') = (0, D). The drift L1 only changes the position of the particle and shifts the particle to (z, z') = (L1D, D). The second bending magnet M2 has hoth dispersive and lens action and places the particle at (z, z') = (L 1D, -P L 1D). The dispersions of the second and fourth bending magnet have negative values, since they bend over negative angles. The bending system is anti symmetrie with respect to point C.
Since the horizontal displacement in the z z' phase plane due to a drift over length L is given by Lz' it is seen that doubly achrornatic behaviour takes place for L1D = L2(PL1D), or:
(7.3)
This condition is independent of the distance L1 •
The drift lengths are the initial free parameters of the bending systern. The length L 2 is fixed by the choice of magnet parameters ( eq. 7.3). There is still freedorn to put a demand on the particle transport for l::.p/p = 0. For example one can require the systern to provide parallel to parallel transport in the bending plane.

114
This fixes L1 :
Matching the linac to the racetrack microtron
2p L1=2L2 = -.-. sm</> (7.4)
Also interesting are the distances Li,1 and 2Lb2 between the ben ding magnets ( Li,1
is the distance between the effective field boundaries of the first ( third) and second (fourth) dipole, 2Lb2 is the distance between the effective field boundaries of the second and third dipole):
2p L1>1 = 2Lb2 = -----;,,·
tan 'Y (7.5)
By demanding parallel to parallel transport the dimensions of the total doubly achromatic system are fixed. The bridged height H is given by
H=4p. (7.6)
The spanned length L is
L = P (si!</> + t~ </>) . (7.7)
In this last equation L is taken from the beginning of the effective field boundary of the first bending magnet to the end of the field boundary of the last one.
The system described above does not offer any focusing in the x-direction. This can be accounted for by placing a quadrupole in the middle of the drift between the second and third bending magnet. In the phase plane diagram in fig. 7.4 this quadrupole is located at point C, ( z, z') = (0, -P L1D). At this position the quadrupole does not influence the doubly achromatic behaviour of the system since the focusing action of a quadrupole in first order only depends on the distance to the optica} axis.
With the constraints described in section 7.4.1 and the demand for a parallel to parallel transport, the radius of curvature and bending angle of the bending magnets follow with equations 7.6 and 7.7: p = 9.8 cm and </> = 0.873 rad. This implies (eq. 7.4) L1 = 2L2 = 25.6 cm and Lb1 = 2L1>2 = 16.4 cm (eq. 7.5), a bridged height H = 39.2 cm and a spanned length L = 67.6 cm.
The transfer matrix of the complete bending system in longitudinal phase plane is given by
( ~ 2.~8)' {7.8)
(2.58 mm/% or 9.0 degrees/%). This results in a total longitudinal transfer matrix for the transport between linac and cavity of
( 1 0.55 ) 0 1 '
(7.9)

the linac to the racetrack microtron 115
(0.55 mm/% or 1.7 degrees/%). The negative dispersive action of the first bend in the microtron is thereby nearly counteracted by the positive dispersive action of the bending system [9].
7 .5 Matching the linac to the racetrack microtron
The total beam transport line between linac and racetrack microtron consists of a quadrupole triplet (Q1 , Q2 , Q3 ), the douhly achromatic bending system described in the previous section and a quadrupole doublet (Q5 , Q6 ). The starting triplet is used to match the linac heam to the bending system and to adjust the shape of the beam in the transversal phase planes for energy selection by the slit system in the focus of the first bending magnet. The doublet at the end is used to match the beam to the acceptance of the microtron.
The strengths of the magnets is found as follows. First with the code TURTLE the acceptance of the bending section is calculated. Then the starting quadrupole triplet with TRANSPORT is designed to match the estimated linac beam to this acceptance. Now the quadrupole halfway M2 and M3 is adjusted to improve the beam parameters in the x-direction and finally the finishing quadrupole doublet is adjusted to match the beam to the acceptance of the microtron. Fig. 7.5 depicts the resulting beam envelopes along the injection line between linac and microtron. The small phase plane figures illustrate by comparison with fig. 7.3 that in the transversal phase planes that the orientation of the linac beam is matched to the orientation of the acceptance of the microtron.
Table 7.2 depicts the parameters of the optical elements in the beam line. The design of the magnet lengths has been done by rneans of sorne simple formula,
that can be considered as rules of thumb. The effective field length of a quadrupole is given by:
Lqef f L;ron + l. la, (7.10)
where Liron is the length of the pole and a is the aperture radius. The effective field length of a dipole is given by:
(7.11)
where g is the gap of the dipole. After the fabrication of the magnets, their field profiles and excita.tion curves have
been measured (10]. The formula appear to be correct within a few percent (e.g. an effective field length of 8.9 cm instead of 8.6 cm for the dipoles ), no sa.turation of the iron of the bending magnets at the required field strength was observed.
Beam steering and positioning in the z-direction is done with the last two bending magnets by putting small extra steering coils around the dipole yoke. Steering (±20 mrad) and positioning (±LO mm) in the x-direction is clone by superposing dipole fields to the quadrupoles of the doublet.

116 the linac to the racetrack microtron
x (mm) 5
4
3
2
z (mm) 5
4
3
2
0 ~~~~~~~~~~~~~~~~~~~~~~~~~ o.oo 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00 2.25 2.50 2.75
" distance along optical axis (m)
Figure 7.5: The beam envelopes along the beam transport line between linac and microtron cavity. The small phase plane figures denote the positioning of the bea.m in the transversa.l phase
planes at the beginning and end of the transport line. The small squares in the phase plane
figures have sides with a length of 1 mm and 1 mra.d. The first crossed square symbolises the first quadrupole Q1, the first triangle in the middle of the picture symbolises the first bending magnet
M1, etc.
The four identical bending magnets will be fed by one common power supply. Then for the proposed system small deviations in excitation current will not lead to va.riations in beam direction or spanned height.
Beam position monitoring with capacitive pick ups (resolution ~ 0.3 mm) in both transversal directions will be done right after the linac and before and after the cavity [12]. A toroidal current transformer between the third and fourth bending magnet will be used for beam current measurements.
Since the linac delivers a beam with a FWHM energy spread of 3.5% and a low energy tail and since the energy acceptance of the microtron is limited to IAE /El < 0.5% it is advantageous to limit the energy spread in front of the microtron in order to minimize radiation production and activation at higher energies [13]. The energy selection will be done with a slit system in the focus of the first bending magnet.

Concluding remarks 117
Table 7 .2: Parameters of quadrupoles and drift lengths.
element effective pole tip apert ure length (cm) field (kG) radius (mm)
l1 22.0 Q1 5.0 0.362 14.5 l2 12.0
Q2 5.0 -0.589 14.5 [3 15.0
Q3 5.0 0.313 14.5 [4 11.0
M1 8.6 3.574 15 (gap) Lb1 16.4 M2 8.6 3.574 15 (gap)
Lb21 6.7 Q4 3.0 -0.197 14.5
Lb22 6.7 M3 8.6 3.574 15 (gap) Lb1 16.4 M4 8.6 3.574 15 (gap) ls 7.5 Qs 2.5 -0 .728 10.5 ls 2.5 Qs 2.5 0.776 10.5 h 18.4
With the aforesaid beam parameters and quadrupole settings and a slit width of 0.13 mm a total beam reduction of about 80 % is calculated. Of the particles with l~E/ El < 0.5% approximately 80 % is transmitted.
With this slit system, pulse to pulse selection (the pulse length is 2µs and the repetition frequency is 50 Hz) is clone with a ferrite magnet, with a l/e•time constant of 0.3 ms (1 n series resistance) and a maximum bending angle of 60 mrad, placed between Q 2 and Q3 . A small deviation in the beam direction at this position causes the beam to hit one of the slits.
7.6 Concluding remarks
A beam transport line between the 10 MeV linac and the Racetrack Microtron Eindhoven that matches at 10 MeV the emittance of the linac beam to the acceptance of the microtron in the three phase planes has been designed. The strengths of the magnets has been calculated for an estimated emittance of the linac beam. Once the

118 Matching the linac to the racetrack microtron
Figure 7.6: Photograph of the complete beam transport line from the linac to the Racetrack
Microtron Eindhoven. Visible from left to right area movable beam stop, the starting quadrupole
triplet (Q1 - -Q3) with a vacuum valve in between, the four bending magnets (M1 - -M4) of
the doubly achromatic bending section with in between the slit system, quadrupole Q4 and the
toroidal current monitor. Just visible to the right is the quadrupole doublet (Q5 - -Q6 ). The
large magnet to the left is the left-hand bending magnet of RTME.
emmittance of the linac beam is measured the strengths of the magnets in the line should be recalculated, in order to match the measured emittance to the calculated acceptance of the microtron.
The described system offers enough degrees of freedom in the transversal phase planes by adjustment of the quadrupole strengths to match the emittance at different linac beam energies, even if these emittances might differ significantly.
The complete beam transport line has been built and delivered by the Centra! Design and Engineering Facilities of the TUE, see fig. 7.6. The field map and excitation curves of the various dipole and quadrupole magnets has been measured.

References 119
References
Wijs M.C.J. de, The 10 MeV linac, Internal Report VDF/NK 95-2.5, M.Sc. Thesis, Eindhoven University of Technology (1995).
[2] Hammen A.F.J., Internal report, M.Sc. Thesis, Eindhoven University of Technology (1996).
[3] Theuws W.H.C., Private communications (1996).
[4] Webers G.A., Design of an electron-optical system for a 75 1Vfe V racetrack microtron, Ph.D. Thesis, Eindhoven University of Technology (1994).
[5] Lazaroms C" Ontwerp van de injectie- en extractielijn van het Einhovense microtron, Internal Report VDF /NK 93-07, Eindhoven University of Technology (1993), in Dutch.
[6] Hagedoorn H.L" Broer J.W., Schutte F., The use of a phase space representation for the design of a beam transport system with doubly achromatic and dispersive modes of operation, Nucl. Instr. and Meth. 86 (1970) 253.
[7] Maanen I.F. van, Ontwerp van het bundelgeleidingssysteem tussen L10 en RTME, Internal Report VDF/NK 94-01, Eindhoven UniversityofTechnology (1994), in Dutch.
[8] Leeuw R.W. de, Botman J.I.M" Maanen LF. van, Timmermans C.J" Webers G.A., Hagedoorn H.L" A 10 Me V injection beam transport line for a racetrack microtron, Proc. Eur. Part. Acc. Conf. London (1994), 2417-2419.
[9] Leeuw R.W. de, Wijs M.C.J. de, Webers G.A" Hagedoorn H.L., Botman J.I.M., Timmermans C.J., Matching the emittance of a linac to the acceptance of a racetrack microtron, Proc. Part. Acc. Conf. Dallas (1995), 1882-1884.
[10] Gossens L.W.A.M" Internal Report, MSc. Thesis, Eindhoven University of Technology (1996).
[11] Septier A" Advances in electronics and electron physics, vol. 14 (1961) 86.
[12) Theuws W.H.C., Beam position monitoring and beam positioning in the racetrack microtron Eindhoven, Internal report VDF /NK 94-36, M.Sc. Thesis, Eindhoven University of Technology (1994).
[13] Hoppenbrouwers M., Ontwerp van de stralingsafscherming voor het Euterpe synchrotronproject, Internal Report SBD 11686, Eindhoven University of Technology (1994), in dutch.

120 Matching the linac to the racetrack microtron

8 The beam transport line between RTME and EUTERPE
A beam transport system providing dispersion matching of the beam from the cavity axis of the Racetrack Microtron Eindhoven to the injection position 1:n the electron storage ring EUTERPE is described 1 .
8.1 Introduction
The 75 Me V beam from the Racetrack Microtron Eindhoven is transported via a 7.6 m long beam line with doubly achromatic bends to the injection position of the electron storage EUTERPE.
In order to facilitate the extraction of the 75 Me V beam from the racetrack microtron with a small bending magnet (M1 in fig. 8.1), the last bend in the microtron has been designed to be less than tr rad, thereby enlarging the distance between the last and the last but one orbit. This smaller bend is realised in a three sector dipole field for the last bend, as opposed to the normal two sector dipole field for the other orbits (section 8.2).
After extraction from the microtron, the beam has to be dispersion matched to the transport line. In section 8.3 it is described how this dispersion matching is achieved with a non symmetrical bending section.
The major part of the final bend towards the ring is provided by a doubly achromatic 1.37 rad bending section with minus unity transfer matrix. This is achieved in asymmetrie section consisting of two identical dipoles with a quadrupole triplet in between (fig. 8.2, section 8.4). The last small bend of 0.2 rad into the ring is achieved by a combination of a magnetic and an electrostatic septum [2].
The two bending sections are connected by a quadrupole doublet, the second section is connected also via a quadrupole doublet to the ring. These quadrupole doublets provide the transverse phase space matching between microtron and ring. In section 8.5 the total beam transport line is described.
The injection procedure of the beam into the ring has been described in ref. [2] and will not be treated here.
1The contents of this chapter have been published, with some modifications, as a conference paper [l].
121

122 The beam transport line between RTME and EUTERPE
In this chapter transverse phase plane (x, x1) refers to the bending plane of the
system and the (z, z1) plane to the motion perpendicular to the bending plane.
8.2 The last bend in the microtron
The bending magnets of the racetrack microtron consist of two distinct field levels for optimised focusing properties (3]. In order to obtain closed or bits ( 11" rad bends) the magnets are rotated in their median planes over 78 mrad. lt is favourable for extraction with a small dipole magnet, that the bending angle of the last orbit (75 MeV) is less than 11" rad, thereby increasing the orbit separation, which is 60.6 min for the other orbits. This smaller bending angle can easily be aèhieved by altering the two sector profile into a three sector profile for the last bend only. The three sector profile consists of a low field section (BL = 0.51 T), a high field section (BH = 0.60 T) and again a low field section, see fig. 8.1. In order to limit possible effects of the fringing fields due to the additional sector, the radial dista.nce, d, between the 70 MeV orbit and the sector edge is about 20 mm, where the gap is 17 mm in the high field section. ·
The sector angle, 0 = 1r / 4 rad, between the first low field sector and the high field sector is dictated by the electron optical design of the microtron. The adjustable parameter for the extraction is the second sector angle fJ. Decreasing () yields an increased radial orbit shift and exit angle.
In a first order approximation the exit angle 4> is given by [3]
</>=(BH f BL - 1) sin(20 + B) (8.1)
and the exit position Ye, with respect to the common drift on the cavity axis by
p/e Ye = BL [2 - (BH/ BL - l)[cos(20 + 0) - cos(20)]], (8.2)
where p and e are the electron momentum and charge. The exit position is limited to 970 mm by the extent of the vacuum chamber. With eqs. 8.1 and 8.2 reasonable values are found: (} ~ 0.52 rad and</>~ 0.146 rad and Ye 945 mm.
The field map of the three sector magnet has been measured and with this map numerical orbit calculations have been performed. From the numerical calculations an exit position Ye = 947 mm and an exit angle ef> 0.10 rad follow, close to the predicted values and sufficient for easy extraction.
8.3 Dispersion matching
Each individual complete orbit in the racetrack microtron forms a double achromat. The large dispersive action of the last single bend will be accounted for by the first bending section in the transport line between microtron and the storage ring. This

RTME
x' last bend in
RTME
\
\
x
123
Figure 8.1: The last bend in the racetrack microtron and the dispersion matching section as well
as the movement in horizontal phase plane in the bending section.
first bending section consists of two non-identical dipole magnets (M1 and M 2 ) with the non-symmetrically placed quadrupole Q1 in between. Since we have chosen to let the beam run parallel with the cavity axis after the first bending section, the bending angle of the second dipole has to be 0.10 rad larger than the bending angle of the first dipole (see fig. 8.1).
To a very good approximation the action of the last bend of the microtron can be regarded as the action by a r. rad bend, which leaves a reference particle with a relative momentum deviation of unity (dp/p = 1) at position (1,0) in the (x,x') pha.se plane. The drift L1 to dipole M 1 does not infiuence the position in phase space. This first dipole M 1 shifts the reference particle both by dispersive and focusing action. The subsequent actions by the drift L 2 , the quadrupole Qi, the drift L3 and the second dipole M 2 can be followed both in fig. 8.1 and tab. 8.1. Note that the second dipole only has dispersive action.

124 The beam transport line between RTME and EUTERPE
Table 8.1: The position after each element in the (x, x') phase plane throughout the last bend in the microtron and the first bending section for a particle with flp/p 1.
after element last bend microtron drift L 1
dipole M1 drift L2
quadrupole Ql drift L3
dipole M2
position (1,0) (1, 0)
(1, -P1 Di) = (1, D*) (1 + L2D*, D*) = (Lv, D*)
(Lv, -Q1Lv + D*) (Lv + L3(-Q1Lv + D*),
-Q1Lv + D*) (0,0)
The dispersive and focusing action of the first dipole shifts the reference particle both by dispersive and focusing action in the (x, x') phase plane from (1, 0) to ( 1, - P1 - D1). Where P1 = sin ef>i/ p is the focusing strength and D1 = sin </>1 the dispersive action of the decomposed bending magnet M 1 • Here p and t/>1 are the bending radius and bending angle of the dipole, respectively. The drifts are taken between the subsequent principle planes of the magnéts.
The conditions for doubly achromatic behaviour of the combination of the last bend in the microtron and the first bending section, which implies dispersion matching, are given by
L3 l - L2(P1 + D1)
(8.3) D2
and
Ql D1 +D2
(8.4) 1 - Li(P1 + D1)'
As can be deduced from eqs. 8.3 and 8.4 and the phase space figure, the quadrupole is focusing in the vertical plane. To avoid strong focusing of Qi, L2 and/or efi1 should be small. For practical reasons it was decided that the center of the transport line should pass at a minimum distance of 15 cm along the second bending magnet of the racetrack microtron. This fixes the minimum value for </>1 at 0.44 rad. Then the bending angle of M 2 equals 0.54 rad. The bending radius p is chosen 0.5 m.
8.4 The doubly achromatic bending system
The doubly achromatic bending system that bends the bearn over 1.37 rad towards the injection spot of the ring consists of two identical bending magnets with a symmetrical quadrupole triplet in between, see fig. 8.2. The last 0.20 rad bend into the ring is performed by a magnetic and an electrostatic septum.
For the design of this bending section the triplet at first is replaced by a single quadrupole, with focusing strength Q, preceded and followed by a drift L 0.43

The achromatic
injection spot of the ring,
septum
125
Figure 8.2: The total transport line between the racetrack microtron and EUTERPE as well as
the movement in the horîzontal phase plane in the second bending section.
m) to the principle planes of the dipoles. The bending system consisting of the two bending magnets with the quadrupole in between is doubly achromatic for Q = 2/ L.
The total horizontal transfer matrix of this bending section is given by
( -1
M= 2 y; - 2Hend
(8.5)
for Hend = 1/ L this yields a minus unity transfer matrix.
The single quadrupole enclosed by the two drifts L with the tota.l horizontal plane transfer matrix
is replaced by a quadrupole triplet with focusing strengths -P, Q 5 , -P, drift lengths d between the quadrupoles and drift lengths b between the quadrupoles and the dipoles (fig. 8.2). By putting P = l/d and Q5 1/(2L) 1/d the focusing strength of the triplet is equal to the strength of the single quadrupole [4]. The decomposed

126 The beam transport line between RTME and EUTERPE
transfer matrix for the triplet in the horizontal plane is given by
T ·z (i ~)( 1 0)(1 ~1 ) rip ethor = 0 1 -f; 1 0 (8.7)
and the transfer matrix for the vertical plane by [5]
T . l t ( 1 -d(3 + 2~) ) rip e ver = Q l . (8.8)
This is the transfer matrix for a virtual negative drift. By demanding that the transfer matrix of the total bending section for the horizontal plane equals a minus unity matrix (eq. 8.5) the lengths of the drifts before and after the triplet are fixed by
d b+- = L.
2 {8.9)
In order to obtain the same minus unity matrix in the vertical plane for the total bending section, the following condition should be fulfilled
J2 - 3d -
2L + 2b = 0, (8.10)
where the two drift lengths b between triplet and dipoles are added to the drift in eq. 8.8.
Eqs. 8.9 and 8.10 yield b L(3 - VS) and d = 2L( VS - 2), which implies Qs = A(VS + 3) and P A(VS + 2). Under these conditions the total doubly achromatic bending section yields a minus unity transfer matrix in both transverse phase planes.
The phase space history for this bending section is given in fig. 8.2.
8.5 The total beam transport system
The two ben ding sections are connected via a straight section (of 1.58 m) with a quadrupole doublet, see fig. 8.2. Also the last straight section (of 2.44 m) towards the injection spot of the ring is covered with a quadrupole doublet.
First the computer code TRANSPORT is used to establish the doubly achromatic behaviour of the two bending sections. Due to the difference in focal powers of a quadrupole in the horizontal and vertical plane, the lens strengths calculated in the previous section are slightly adjusted. Then the complete transport line is used as input and only the quadrupoles in the connecting doublets are allowed to vary. These doublets are adapted to match the transverse parameters of the beam from the microtron to the acceptance of the ring and to assure a beam waist in both transverse pha.se planes at the injection spot of the ring.

The total beam
x (mm) 6
5
4
z
0 ~~~···"-~~~-·····~~~~~J·~-~~·····~~~~· -~~--~ 0 2 3 4 5 6 7 8
' distance along optica! axis (m)
127
t Figure 8.3: The beam envelopes along the beam transport line between RTME and EUTERPE,
shown are the half widths. The small phase space figures denote the positioning of the beam in the
transverse phase planes at the beginning and end of the transport line. The first triangle in the
middle of the picture symbolises the first bending magnet Afi, the first crossed square symbolises
the first quadrupole Q1 , etc.
The resulting beam envelopes along the complete line between RTME and EUTERPE are depicted in fig. 8.3. As input beam the maximum emittance of the racetrack microtron is used (4.6 mm·mrad horizontal and 4.7 mm·mrad vertical) [6]. These emittances are calculated by tracking the acceptance of the microtron through this machine. The two individually variable quadrupole doublets offer enough freedom to adjust the opties in case the phase space figures differ from the assumed on es.
Table 8.2 depicts the components of the total beam transport line between RTME and EUTERPE with their determining parameters.
Beam steering in both transverse directions will be clone with steering magnets _;->laced between the quadrupoles of the doublets and in the first bending section after the quadrupole. Beam position monitoring with capacitive pick ups will be clone right after the microtron, just before injection into the ring and at several

128 The beam transport line between RTME and EUTERPE
Table 8.2: Parameters of the components of the transport line between RTME and EUTERPE, from the placing of the drifts in this table it is clear which (thick) lens elements they connect.
element effective length pole tip field half aperture (cm) (kG) (mm)
l1 10.0 M1 21.8 5.034 15.0 (gap)
12 15.0 Qi 10.0 -0.443 14.5 la 99.1
M2 27.1 5.034 15.0 (gap) [4 34.5
Q2 10.0 -0.719 14.5 /5 68.9
Qa 10.0 0.298 14.5 ls 34.5
Ma 26.1 6.623 15.0 (gap) [7 28.3
Q4 10.0 -1.380 14.5 ls 18.2
Qs 10.0 1.781 14.5 /9 18.2
Qs 10.0 -1.380 14.5 lio 28.3 M4 26.l 6.623 15.0 (gap) 111 48.3 Q1 10.0 -0.324 14.5 l12 75.3 Q8 10.0 0.168 14.5 ha 100.0
other places along the line. The ultra high vacuum system of the ring and the high vacuum system of the transport line will be separated by a thin foil ( ~ IOµm ), which will only cause a minor emittance growth.
8.6 Concluding remarks
A flexible design for the beam transport line between the Racetrack Microtron Eindhoven and the storage ring EUTERPE has been described.
The mechanica! design of the line and its electron optical components is described in the report by Steins [7].

References 129
References
[1] Leeuw R.W. de, Greevenbroek H.R.M. van, Botman J.I.M., Webers C.A., Timmennans C.J., Hagedoorn H.L., The extraction orbit and the extraction beam transport line for a 75 Me V racetrack microtmn, Proc. Part. Acc. Conf., Dallas (1995), 1885-1887.
[2] Xi B., Design studies for the electron storage ring EUTERPE, Ph.D. Thesis, Eindhoven University of Technology (1995).
[3] Webers G.A.,Design of an electron-optical system for a 75 Me V racelrack microtron, Ph.D. Thesis Eindhoven University of Technology (1994).
[4] Banford A.P., The transport of charged particle beams, Chilton, Berks (1969).
[5] Greevenbroek H.R.M. van, Design of the beam transport system between RTME and EUTERPE, Internal Report VDF /NK 94-39, Eindhoven University of Technology (1994).
[6] Leunissen L.H.A., Private Communications (1994).
[7] Steins H.M.R., Ontwerp van een 75 Me V injectielijn voor een elektronenopslagring, Internal Report, Eindhoven University of Technology (1996), in dutch.

130 The beam line between RTME and EUTERPE

9 Concluding remarks
In this thesis the accelerator injection chain of the electron storage ring EUTERPE is described. This injection chain will consist of a 10 MeV travelling wave linac followed by the 10-75 MeV RaceTrack Microtron Eindhoven (RTME). Although the completion of the storage is questionable, the combination of the two accelerators forming the injection chain will be completed. In all probability this combination will be ready for use in 1997.
The power flow and electric field strength in the 10 Me V linac have been calculated by means of a power diffusion equation, where the structure parameters have been calculated by means of a model based on the dimensions of the structure. From the solution of the power diffusion equation the load line can be established. This calculated load line compares very well with the measured load line. The shape of the electric field in the linac has been calculated by means of the mode matching technique and is presented as a Floquet series expansion in spat.ia! harmonies.
The linac has been put into operation. The energy output of the linac has been characterised by means of an energy dispersive measurement using a bending magnet and a slit. The measurement of the transversal emittances by means of two slit systems ha.s been completed at the time of writing, unfortunately too late to incorporate the results in the present work. The exact size and shape of this emittance is of importance for the matching of the linac beam to the microtron.
For the beam transport and matching between linac and RTME, a beam transport line with doubly achromatic bending section has been designed and constructed. The transport line provides enough degrees of freedom to match the linac beam in six-dimensional phase space to the acceptance of the microtron. With the measured emittances, the exact settings of the ma.gnets in the transport line have to be calculated. Also an electron optica! design for the beam transport line between RTME and EUTERPE has been presented.
After the first bend in the racetrack microtron the particles reach the accelerating structure. This 3 GHz, 5 MeV accelerating structure has been designed and constructed. For the numerical design and tuning procedure of the cavity the behaviour of a chain of coupled cavities, or resonators, has to be known. Therefore a model has been presented, that describes a chain of coupled cavities on the basis of coupled RLC-circuits. After the completion of the cavity the properties of the cavity have been esta.blished by means of a series of test measurements. These rneasurements
131

132 Concluding remarks
point out that there is good agreement between the design and rneasured values and moreover, that the cavity is suited as accelerating structure of the microtron.
Both accelerating structures in the injection chain will be powered by their own magnetron. A well known phase relation between the two magnetrons will be established by injection locking the linac magnetron to the rnicrotron magnetron. Experirnents point out that by doing this a stable phase relation between the two magnetrons can be established. The RF power set-up of the accelerator combination based on the use of two magnetrons has been presented.
During their acceleration in the radio frequency accelerating structures the electrons will be (de )focused by the electromagnetic fields. A navel description of the focusing effects in radio frequency linear accelerators using Harniltonian mechanics has been presented. This description is illustrated by calculated results of the transversal focusing in the rnicrotron cavity, that compare well with other descriptions.
The practical, and a time consuming, part of the work performed, consisted out of the design, construction and testing of a large nurnber of components of the injection chain. For example the completion and putting into operation of the linac has been a multi-disciplinary, approximately 8 people-year project, finished within a time span of 18 months. The design, construction and testing of both the accelerating cavity of the racetrack microtron and the 10 MeV beam transport line were technological challenging projects that have been brought to success in close cooperation with the Central Design and Engineering Facilities of the Eindhoven University of Technology.

Appendix A
Parameters for a standing wave linac
The system of generator, coupled cavities and particle beam can be modelled by means of fomped element circuits. First we describe the modelling of a free running resonator, then the complete system will be treated.
A.1 Free running resonator
Here we wi.11 adapt the series circuit, that in chapter 3 will be used to describe the behaviour of coupled resonator chains. In appendix A.2 we will adapt the parallel circuit to describe a beam loaded generator coupled resonator.
Fig. A.l depicts a series resonant circuit, consisting of a series resistor Rs, an inductor L, a capacitor C and a generator with drive voltage V Voejwt.
• The input impedance Zin as seen by the generator is [l]
= Rs + jwL -wC
(A.l)
î
Figure A.1: Series RLC resonant. circuit, see text for an explanation of the symbols.
133

134
• The time average complex power, Pin, delivered to the resonator is
where Pcav = IIl2 R8 /2 is the average power dissipated by the resistor, W m = 1112 L/4 is the average stored magnetic energy and We= CIVcl 2 /4 1112 /(4w2C) the average stored electric energy.
• resonant occurs when the average stored magnetic and electric energies are equal, Wm = We. From this resonance condition the resonant frequency, w0 ,
follows 1
Wo =..;re· (A.3)
It follows from eqs. A.l and A.3 that the input impedance of a resonator at resonance is purely real.
• The unloaded quality factor Q0 of a resonator is defined by
Qo = 27r x stored energy at resonance = 27r Wst energy consumed per period T Pcav
woWst WoL --=--, Pcav Ra
(A.4)
T = 27r / w0 is the period of oscillation, Wst = W m + We represents the stored energy.
• The voltage corresponding with the maximum energy ga.in of a particle, Vc, is related to the dissipated power in the cavity walls, Pcav, by the effective shunt impedance Rsh:
l"Vcl 2 2w5L2
Rsh Pcav = ~· (A.5)
The factor two at the right hand side of the expression is historically grown [2].
A series resonator is characterised by R", L and C, but equally well by w0 , Q0 and Rsh, as follows from eqs. A.3 A.5. These last three parameters are frequently used to characterise the behaviour of an accelerating cavity as a resonator.
A.2 Beam loaded, generator coupled resonator
Fig. A.2 depicts the simplified lumped element circuit for a beam loaded, generator coupled resonator [3]. The resonator is now represented by the parallel circuit of L, RP and C.
• The power dissipated in the resonator is given by (cf. eq. A.5):
(A.6)

Beam resonator 135
L Vc
generator resonator beam
Figure A.2: The simplified circuit for a beam loaded, generator coupled resonator
• The beam current is represented by the ideal current source Ib with a current across the cavity gap with voltage V,,. The source corresponds with the first harmonie component of the beam current (ultra relativistic particles). Assuming a 8-function distribution, it is related to the average current 10 by h 210.
• The ideal current source 19 is related to the generator power by [3]:
(A.7)
here it is assumed that the generator is separated from the resonator by either a circulator or an isolator.
• The coupling ratio ,B is defined as
(A.8)
here Ro is the generator matched characteristic impeclance of the transmission line. N is called the transformation or step-up ratio at the coupling by loop or iris between transmission line and resonator.
• If the generator is switched off and the ratio of the beam induced powers radiated out of the cavity, , and dissipated in the cavity walls, Pcav, is calcula.tecl, i.e. the ratio of the powers dissipated in the resistors Rp/,8 and Rp, an interpretation for the coupling ratio is found:
(J (A.9)

136 Parameters for a
• If it is assumed that the particle beam gains maximum energy in the cavity, the corresponding voltage, V,,, is simply the difference of the generator induced, Vg, and beam induced voltage, VI,:
(A.10)
• After some manipulations this equation gives us the required generator power as a function of the beam power, Pb, the dissipated power in the cavity walls and the coupling ratio [3]:
With the expression for conservation of power:
Pgen Pcav +Pref+ H,
the re:fiected power is also written as a function of the beam power:
Pcav ( Pref=
413 1
(A.11)
(A.12)
(A.13)
This equation implies that the reflected power is zero, which means perfect matching between generator and resonator, if:
pb ,8=1+-p .
cav (A.14)
• For the beam loaded, generator coupled resonator a loaded quality factor Q L
is defined by P1oss Pcav + Pref 1 1
Wo Wst = Wo w.t = -Q-o + -Q-ex-t' (A.15)
where P1oss is the total power loss in the resonator per period, and Qext is the external quality factor. With eq. A.9 QL can he rewritten as
(A.16)
• The loaded shunt impedance at resonance is given by:
(A.17)

resonator 137
Filling time The power loss in a cavity without excitation force is equal to the rate of change of the stored energy:
Ptoss = d dt Wst· (A.18)
Together with eq. A.15 the decay of the stored energy is written as:
(A.19)
where W 0 is the stored energy at t = 0 and r w is called the decay (or filling) time of the stored energy. Since W ex V(, the field will decay with a decay (filling) time rv:
Wo (A.20)
Bandwidth The differential equation, which relates phase </>, amplitude Vco and radial frequency w of the voltage across the capacitor Vc = Vco ej(wtH), fora resonator with excitation force C ejwt and damping w0/QL is given by
d2v~ wo dVc 2v.: _ C jwt + Q d + w0 c - e , L t
(A.21)
where w0 is the resonant frequency for QL -+ oo. Cis a function of the total system of generator, resonator and beam [3]:
c fDD2V';3 ( IojRp/P9 ) yup1g Qo 1- 2.JP . (A.22)
Eq A.21 solves to c
v~= ----r~~,~~~~~=
+ CoQL) (A.23)
and 1
tan </> = -~--~ QL
(A.24)
The stored energy in the capacitor is proportional to the square of the amplitude of the voltage across the capacitor. The behaviour of bath the square of the voltage amplitude and the phase as a function of the frequency is depicted in fig. A.3.
The relative frequency difference between the points where the stored energy is half the maximum value is called the bandwidth, BW:
BW Wo
l QL. (A.25)

138 Parameters for a standing wave linac
1.2 x10•
1.00 F===::=----,-------i
to (V~C)2 tf> (rr rad)
0.75 0.8
0.6 0.50
0.4 0.25
0.2
0.0 1--~~==----L--==-.......l 0.00 L_ _____ _J_ __ _:::.==== 2.998 3.000 3.002 2.998 3.000 3.002
-+ "' (21T109 rad/ s) _,. w (21T109 rad/s)
Figure A.3: Amplitude (left) and phase (right) behaviour of a resonator around resonance,
QL = 10000, wo = 6d09 rad/s; typical parameters for the accelerating structure of the Racetrack
Microtron Eindhoven.
The definitions given above all refer to the behaviour of a cavity as a resonator. When a cavity is used as accelerator a few more definitions are wanted, that will be discussed next.
Transit time factor The transit time factor accounts for the fact that a particle travels with a finite velocity in an electric field across a gap, which has a harmonie time variation. The transit time factor T is given by:
T [J Bi(z)eUwz/v+<f>m)dzl
f Ez(z)dz (A.26)
where Ez( z) is the amplitude of the accelerating electric field as a function of the position z. The enumerator has to be calculated fora particle that gains maximum energy in the cavity, corresponding with the phase 4'm· Moreover, it is assumed that the particle velocity is constant in the cavity.
Energy gain The energy gain .ó.E of a partide in a cavity is given by:
.ó.E = qVTcos(<f>a), (A.27)
here V = 1 f Ez ( z )dz 1 is the cavity potential, q the charge of the part iele and <Pa the phase of the partide referred to the particular phase which would yield the maximum energy gain.

BeamJoaded,_generator coupled resonator 139
Shunt impedance The shunt impedance rsh per unit length is defined by
r'sh = (A.28)
where !J..P /La is the power loss in the walls per unit length, La, and Eoz the average amplitude of the accelerating field over the unit length La ( often the cavity length):
1 JLa/2 Eoz = L Ez(z)dz.
a -La/2 (A.29)
To take care of the transit time factor an effective shunt impedance per unit length is defined:
(A.30)
which is related to the effective shunt impedance Rsh in the lumped element circuits by Rsh f r'effdz. Note that Pcav is given by Pcav J !J..Pdz and Vc = T J Ez(z)dz LaEozT.
Skin depth The thickness of the layer, or skin depth, over which the electric field is decreased to 1/ e of its original value is given by:
8.= 12, y-:;µ;; (A.31)
where µ is the permeability and <Y the conductivity of the wall material; at 3 GHz for copper D8 l.2µm.
The shunt impedance is inversely proportional to the skin depth. Since up to several TeraHertz the conductivity <Y of metals can be considered to be frequency independent [2], the shunt impedance of a cavity increases proportional to the square root of the frequency and the conductivity of the wall material:
Rsh ex (A.32)
Closely related to the skin depth is the metal surface resistance
(A.33)
at 3 GHz for copper Rs,m = 14.3 mO.

140 Parameters for a wave linac
References
[1] Pozar D.M., Microwave engineering, Addison Wesley Publishing Company Ine" London (1990).
[2] Dome G., RF theory, in CERN Accelerator School RF engineering for particle accelerators, CERN report 92-03 (1992), 1-96.
[3] Theeuwen M., The accelerating cavity of the racetrack microtron of the TEUFELproject, MSc. Thesis, Internal report VDF /NK 91-28, Eindhoven University of Technology (1991).
[4] Weingarten W., Superconducting cavities in CERN Accelerator School RF engineering for particle accelerators, CERN report 92-03 (1992) 318 - 348.

Summary
In this thesis the accelerator injection chain of the electron storage ring EUTERPE is described. This chain consists of two accelerators: a 10 MeV linear travelling wave accelerator (linac) followed by the 10 75 Me V Racetrack Microtron Eindhoven (RTME). The design of the electron-optical system has been the subject of another thesis1 and is not described here. Results from that thesis are used in the present work.
In chapter 1 an introduction to the layout of EUTERPE and its injectors is given.
In the following chapters (2~5) the focus lies on the design, construction and understanding of the radio frequency (RF) accelerating structures of the two machines that form the injection chain (linac and RTME), as well as on the synchronisation, of the pulsed high power microwave magnetrons.
The power flow and electric field strength in the tra.velling wave linac are described by means of a power diffusion equation that uses the structure dimensions as input varia.bles. From this equation the load line of the linac is calculated, which is in agreement with measured data. The shape of the electric field in the linac, expressed as an expansion series in space harmonies, is calculated by means of a mode matching technique.
The numerical design, mechanica! design, and construction and tuning procedure of the 3 GHz standing wave cavity of microtron are described. For the numerical design and the tuning measurements a good understanding of the behaviour of an array of coupled resonators is required. Therefore, a lumped element circuit model that describes these kinds of arrays is presented. The standing wa.ve structure that provides an acceleration of 5 MeV per passage at a dissipated power of 1 MVv during the pulse, has been built. Test measurements, both at signal and high power level, indicate that the cavity lives up to the demands and is suited to serve as the accelerating structure of the racetrack microtron.
For cost effectiveness both the tra.velling wave linac a.nd the standing wave structure are powered by a 2 MW pulsed magnetron. To assure synchronous acceleration in the two accelerators, the linac magnetron is injection locked to the microtron magnetron. The phase deviation of the two sources during the pulse is smaller than
1 Webers G .A. ,Design of an electron-optica/ system for a 75 Me V racetrack micro iron, Ph.D. Thesis, Eindhoven U niversity of Technology ( 1994 ).
141

142 Parameters for a wave linac
2 degrees, sufficiently small for proper synchronous acceleration.
In the chapters (6-8) the focus lies on the charged particle dynamica! behaviour in RF accelerating structures and the beam transport between the different accelerators: linac, RTME and EUTERPE.
The particle dynamica! behaviour in RF linear accelerators is described by means of a Hamiltonian. As an example the transversal behaviour in the microtron's standing wave structure is described and cornpared with nurnerical simulations.
The design of the 10 Me V beam transport line between linac and RTME that matches the estimated transversal and calculated longitudinal emittance of the linac beam in 6-dimensional phase space, to the acceptance of the rnicrotron, is described. The complete transport line has been constructed and its various components have been measured.
Finally, the electron optica! design of the beam transport line that connects RTME with the ring EUTERPE is presented.

Publications
1. Peters M.C.A.M., Hirschberg A., Konijnenberg J.A. van de, Huijsmans, F.J.J., Leeuw R.W. de, Beek S.S. Op de, Wijnands A.P.J" Experimental study of the aero-acoustic behaviour of an open pipe termination at low A1ach numbers and low Helmholtz numbers, Proc. 14th aeroacoustics conference of the DGLR/ AIAA, Aachen (1992).
2. Duijneveldt W. van, Botman J.LM., Timmermans C.J., Leeuw R.W. de, Modification of a medica! linac to a polymer irradiation facility, Nucl. Instr. and Meth. B79 (1993) 871-874.
3. Leeuw R.W. de, Mutsaers P.H.A., Mangnus A.V.G., Hagedoorn H.L., Derivation of the trajectory equations of achromatic quadrnpoles with hamiltonian theory, Nucl. lnstr. and Meth. B83 (1993) 284-290.
4. Leeuw R.W. de, Coppens J.E., Kleeven W.J.G.M., Timmermans C.J., Botman J.I.M" Design study for the accelerating cavity of the racetrack microtron Eindhoven, Proc. Eur. Part. Acc. Conf. London (1994) 2092-209,1.
5. Leeuw R.\V. de, Botman J.I.M., Maanen I.F. van, Timmermans C.J., \Vebers G.A., Hagedoorn H.L., A 10 Me V injection beam transport line fora racetrack microtron, Proc. Eur. Part. Acc. Conf. London (1994) 2417-2419.
6. Kleeven W.J.G.M., Botman J.I.M., Coppens J.E., Delhez J.L., Hagedoorn H.L., Heide J.A. van der, Knoben M.H.M., Leeuw R.\V. de, Timmermans C.J., Bouman A.F.M., Verschuur J.W.J., The accelerating cavity of the TEUFEL racetrack microtron, Proc. Eur. Part. Acc. Conf. London (1994) 2095-2097.
7. Leeuw R.W. de, Coppens J.E., Linear standing wave accelerators in the gigahertz regime, Tijdschrift van het Nederlands Electronica- en Radiogenootschap deel 59, nr. 4 (1994) 151-159.
8. Leeuw R.W. de, Greevenbroek H.R.M. van, Botman J.I.M., \Vebers G.A., Timmermans C.J" Hagedoorn H.L., The extraction orbit and the extraction beam transport line fora 16 AJe V racetrack microtron, Proc. Part. Acc. Conf" Dallas (1995) 1885-1887.
9. Leeuw R.W. de, Wijs M.C.J. de, Webers G.A., Hagedoorn H.L., Botman J.I.M., Timmermans C.J., 1\!Iatching the emittancr of a linac to the acceptance of a racetrack microtron, Proc. Part. Acc. Conf., Dallas (1995) 1882-1884.
143

144 Parameters fora standing wave linac
10. Theuws W.H.C., Leeuw R.W. de, Webers G.A., Timmermans C.J" Botman J.I.M., Hagedoorn H.L., Beam positioning and monitoring in the racetrack microtron Eindhoven, Proc. Part. Acc. Conf. Dallas (1995) 2738-2740.
ll. Kemper A.H" Xi B" Leeuw R.W. de, Theuws W.H.C., Botman J.I.M., Timmermans C.J., Hagedoorn H.L., Oude Velthuis R.G.J., A distributed dipole power supply system for the EUTERPE electron ring, Proc. Part. Acc. Conf. Dallas (1995) 1970-1972.
12. Leeuw R.W. de, Botman J.I.M., Coupled cavity modelling for the side coupled cavity linac of the European spallation source, ESS-report 95-22-L (1995).
13. Leeuw R.W. de, Coppens J.E., Drouen T., Timmermans C.J., Botman J.I.M., Hagedoorn H.L., Brinkgreve P., The accelerating cavity of the racetrack microtron Eindhoven, Proc. Eur. Part. Acc. Conf. Barcelona (1996).
14. Botman J.l.M" Leeuw R.W. de, Wassink C.Ph., Sande M.A. van de, Tank, cell and bridge coupler design for the GGL of the ESS project, Proc. Eur. Part. Acc. Conf. Barcelona (1996).
15. Leeuw R.W. de, Timmermans C.J., The RF power set up fora linac • racetrack microtron combination, Proc. Eur. Part. Acc. Conf. Barcelona (1996).
16. Theuws W.H.C., Leeuw R.W. de, Gossens L.W.A.M., Botman J.I.M., Timmermans C.J" Hagedoorn H.L., Diagnostic system of the Eindhoven linac · racetrack microtron combination, Proc. Eur. Part. Acc. Conf. Barcelona (1996).
17. Hagedoorn H.L" Botman J.I.M" Leeuw R.W. de, Stas R.J.W., Orbit dynamics in a low energy electron linear accelerator, Proc. Eur. Part. Acc. Conf. Barcelona (1996).
18. Leeuw R.W. de, Botman J.I.M., Timmermans C.J., Kleeven W.J.G.M., Hagedoorn H.L., Design and construction of standing wave accelerating structures at TUE, Proc. Linac Conf. Geneva (1996).
19. Pruiksma J.P., Leeuw R.W. de, Botman J.l.M., Hagedoorn H.L., Tijhuis A.G" Electromagnetic fields in periodic linear travelling-wave structures, Proc. Linac Conf. Geneva (1996).
20. Theuws W.H.C., Botman J.I.M., Hagedoorn H.L., Leeuw R.W. de, Timmermans C.J., The 75 Me V racetrack microtron Eindhoven, Proc. Linac Conf. Geneva (1996).

Samenvatting
In dit proefscrift wordt de versneller injectieketen van de elektronenopslagring EUTERPE beschreven. Deze injectieketen bestaat uit twee versnellers: een 10 MeV lineaire lopende-golfversneller (linac) gevolgd door het 10-75 MeV R.acetrack Microtron Eindhoven (RTME). Het ontwerp van het elektronenoptische systeem van RTME is het onderwerp van een eerdere proefschrift 1 en wordt hier niet beschreven. De resultaten uit dat proefschrift worden gebruikt in het voorliggende werk.
In hoofdstuk 1 wordt een introductie tot het ontwerp van EUTERPE en zijn injectors gegeven.
In de volgende hoofdstukken (2-5) ligt de nadruk op het ontwerp, constructie en begrip van de radiofrequente (RF) versnelstructuren van de twee machines die de injectieketen vormen (linac en RTME) én op de synchronisatie van de gepulste hoogvermogen microgolf magnetrons.
Het vermogensverloop en de elektrische veldsterkte in de lopende-golfünac worden beschreven aan de hand van een vermogensdiffusievergelijking, die de structuurdimensies als uitgangspunt gebruikt. Met behulp van deze vergelijking is de belastingslijn van de linac berekend; deze stemt zeer goed overeen met gemeten data. De vorm van het elektrische veld in de linac, gegeven als een reeksontwikkeling in ruimtelijke harmonischen, is berekend met behulp van een aanpassingstechniek voor de golfpijpmodi.
Het numerieke ontwerp, het mechanische ontwerp en constructie en de afstemmingsprocedure van de 3 GHz staande-golf-cavity van het microtron worden beschreven. Voor het numerieke ontwerp en de afstemmingsmetingen is een goed begrip van het gedrag van een keten gekoppelde resonatoren vereist. Daarom wordt er een model met discrete elektronische componenten gepresenteerd, dat dit type ketens beschrijft. De staande-golfversnelstructuur, die per doorgang de elektronen met 5 MeV versnelt bij een gedissipeerd vermogen van 1 MW tijdens de puls, is gerealiseerd. Testmetingen, zowel op signaalniveau als op hoog vermogen, tonen aan dat de cavity geschikt is om te dienen als versnelstructuur van het Racetrack Microtron Eindhoven.
Als relatief goedkope oplossing is er voor gekozen om zowel de lopende-golf- als de staande-golfversnelstructuur te bedrijven met een gepulst 2 MvV magnetron. Om
1 VVebers G.A.,Design of an electron-optical system fora 75 Me V racetrack microtron, Ph.D. Thesis, Eindhoven University ofTechnology (1994).
145

146
synchrone versnelling in de twee versnellers te verzekeren is het linac-magnetron gekoppeld met het microtron-magnetron. Dit gebeurt door een gedeelte van het vermogen van dit laatste magnetron te koppelen in het linac-magnetron. De faseafwijking tussen de twee bronnen tijdens de puls is kleiner dan 2 graden, klein genoeg voor synchrone versnelling.
In de hoofdstukken 6-8 ligt de nadruk op het dynamische gedrag van geladen deeltjes in RF versnelstructuren en op het bundeltransport tussen de verschillende versnellers: linac, RTME en EUTERPE.
Het dynamische gedrag van de deeltjes in lineaire RF-versnellers wordt beschreven met behulp van een Hamiltoniaan. Bij wijze van voorbeeld wordt het transversale gedrag in de staande-golfversnelstructuur van het microtron beschreven en vergeleken met numerieke simulaties.
Het ontwerp van de 10 MeV bundeltransportlijn tussen linac en RTME, die de geschatte transversale en berekende longitudinale acceptantie van de li:riacbundel in de 6-dimensionale faseruimte aanpast aan de acceptantie van het microtron, wordt beschreven. De complete transportlijn is gebouwd en de verschillende elektronenoptische onderdelen zijn doorgemeten. Alle onderdelen voldoen aan de ontwerpspecificaties.
Tot slot wordt het elektronenoptische ontwerp van de 75 MeV bundeltransportlijn, die RTME met EUTERPE verbindt, gepresenteerd.

Nawoord
Langs deze weg wil ik iedereen die bijgedragen heeft aan de totstandkoming van dit proefschrift bedanken voor zijn of haar enthousiasme en de plezierige samenwerking. Op het gevaar af een heleboel mensen te vergeten, wil ik toch een aantal namen specifiek noemen.
Een promotie op een experimenteel technisch-fysisch onderwerp is niet mogelijk zonder de hulp van een aantal bekwame technici: Jack Graus, Ad Kemper en Henk Heller zorgden voor vele mooie en uiteindelijk altijd werkende oplossingen. Aad Sweep begeleidde mij bij mijn eerste aarzelende stappen in het veld van hoogvermogen- en hoogfrequenttechnieken.
In de verschillende werkplaatsen op de TUE, zowel op de Faculteit der Technische Natuurkunde als bij de Centrale Technische Dienst, zijn vele onderdelen van de verschillende opstellingen gemaakt. Alle namen noemen van de mensen die er aan gewerkt hebben zou te ver gaan, echter een paar mogen niet onvernoemd blijven: Marius Bogers, Peer Brinkgreve, Jan Ketelaars, Theo Maas, Jovita Moerel, Henk van de Vleuten en dus al die anderen. De tekeningen voor al het fraais zijn gemaakt door Piet Magen dans en Jan Wiggers.
Iedere promovendus heeft een voorbeeld nodig; tijdens mijn promotie heb ik dit voorbeeld kunnen samenstellen uit de eigenschappen van mijn directe collega's in de groep versnellerfysica: Jan Botman, Henk Hagedoorn, Wiel Kleeven en Bob Timmermans. En ·willem Theuws natuurlijk, nog geen voorbeeld, maar wel een prima collega.
Een van de leukste aspecten van het promoveren op een universiteit is de samenwerking met stUdenten: zonder hun bijdragen was dit proefschrift in de huidige vorm niet mogelijk geweest. Als afstudeerder waren betrokken: Joris Coppens, Willem Theuws, Marcel de Wijs, Jitse Pruiksma en Addo Hammen. Als stagiair waren betrokken: Joris Coppens (alweer), Fredrik Tegenfeldt, Ted van Maanen, Frank Roghair, Börje Norlin, Casper Wassink, Henk van Greevenbroek, Mattias Georgsson, Tjerk Drouen, l'vfarco van de Sande, Daniël Dukers en Roland Stas.
De mensen van de stralingsbeschermingsdienst hebben door hun vele metingen mede zorg gedragen voor mijn veiligheid. Marc Hoppenbrouwers heeft de berekeningen voor de stralingsafscherming van de verschillende versnellers gedaan.
Verder wil ik de bewoners van het Cyclotrongebouw noemen, die allemaal, soms heel direct, soms iets indirecter, bijgedragen hebben aan de totstandkoming van dit
147

148
proefschrift. Al was het alleen al door zorg te dragen voor een uitstekende sfeer en een prima werkklimaat, waarbinnen zeer veel mogelijk is.
I thank my colleages of the European Spallation Source project group for the friendly and fruitful collaboration. lt was a pleasure to be part of this international study group in the framework of the Human Capita! and Mobility programme of the European Committee.
Tot mijn vrienden en familie tenslotte: een succesvolle promotie vraagt vaak meer dan een veertigurige werkweek en bij tijd en wijlen zelfs een bijna volledige overgave. Ik zal pogen de komende tijd op zijn minst iets van de schade goed te maken.

Curriculum Vitae
9 oktober 1967
1980 1986
1986 - 1992
1992 - 1996
aug. 1995 - okt. 1995
Geboren te Nijmegen
VWO aa.n het Maurick College te Vught
Studie Technische K atuurkunde aan de Technische Universiteit Eindhoven
Promovendus aan de Technische Cniversiteit Eindhoven in de groep versnellerfysica van de Faculteit der Technische Natuurkunde
Research Engineer bij Philips Yledical Systems - Radio therapy, Crawley (UK)
149

Stellingen
behorende bij het proefschrift
The Accelerator lnjection Chain
of the
Electron Storage Ring EUTERPE
door Rard Willem de Leeuw
Eindhoven, 31 oktober 1996

-I-Bij de ~rekening van de transversale focusserende werking ten gevolge van de ra.diofr~quent versnelstructuur van een laag-energetische versneller, waarbij de celafmetingen kleiner zijn dan de golflengte va.n de hoogfrequentgolf, zijn de eerste twee termen uit de Floquetreeks voor de beschrijving van het elektromagnetische veld het belangrijkste. De fasefocussering ka.n echter niet zonder meer verwaarloosd worden, doch de invloed van de hogereordecoëfficiënten in de Floquetreeks meestal wel.
- Dit proefschrift, hoofdstuk 6.
-II-Ha.tch en Williams hebben een theorie opgesteld voor 'multipa.cting'. Proch et al. hebben een experimenteel onderzoek verricht na.ar dit verschijnsel en de resultaten vergeleken met een vereenvoudigde theorie. De overeenstemming tussen Prach 's experimenten en de oorspronkelijke theorie va.n Ha.tch en Williams is echter zeer veel ~ter.
- A.J. Hatch en H.B. Williams, Phys. Rev. vol. 112, no. 3 (1958), 681 - 685. - D.Proch et al., Proc. Part. Acc. Conf. Dallas (1995) 1776-1778. • Dit proefschrift, paragraaf 4.3.1.
-III-Het begrip fa.sesnelheid van een lopende-golfversneller dient met de nodige voorzichtigheid gebruikt te worden.
- Dit proefschrift, hoofdstuk 2.
-IV-De zogenaamde 'interlaced' versnelstructuur leent zich niet goed voor serieproduktie.
- V.A. Va.guine, IEEE Trans. Nucl. Sci. vol. NS-24, no. 3 (1977), 1084. 1086.

-V-Omdat het bouwen van kleinere versnellers multi-disciplinair en technologisch van aard is, is deze activiteit uitermate geschikt om ingenieurs op te leiden. Bovendien zijn de toepassingsmogelijkheden van kleine versnellers zo groot dat deze toepassingen niet van meet af aan bekend hoeven te zijn.
-VI-De reeds meer dan 15 jaar geleden geponeerde stelling van J .I.M. Botman "Een industrieland dat zich geen synchrotronstralingsbron kan permitteren is een arm land" blijft hedentendage onverkort van kracht.
- J .I.M. Botman, Centml region study for a moderate energy cyclotron, proefschrift Technische Universiteit Eindhoven (1981).
-VII-De populariteit van de computer als hulpmiddel bij metingen en simulaties leidt er ten onrechte toe dat relatief eenvoudige doch nauwkeurige experimenten en inzichtelijke analytische beschouwingen uit de belangstelling geraken.
-VIII-Voor de ontwikkeling van ionenbundelana.lysetechnieken ten behoeve van preparaten bestaande uit organisch materiaal is de ontwikkeling van geavanceerde modellen voor geïnduceerde preparaatschade van wezenlijk belang voor de uiteindelijk te behalen gevoeligheden.
-IX-Het feit dat voor het gebruik van voorheen vrij beschikbare programmatuur voor wetenschappelijke berekeningen nu vaak betaald dient te worden, bevordert het illegale gebruik en draagt er bovendien toe bij dat universitaire groepen niet over de meest recente programmatuur beschikken.
-X-Het gebruik van wetenschappelijke programmatuur waarvan men slechts de zogenaamde executable ter beschikking heeft, dient afgeraden te worden.