Embed Size (px)
Citation preview

1
Dr. PEDRO CORDOVA MENDOZA
ICA-PERU
CURSO:
INSTRUMENTACION Y CONTROL DE PROCESOS AMBIENTALES
5 de Abril del 2013
TEMA:
INSTRUMANETACION Y CONTROL DE PROCESOS
UNIVERSIDAD NACIONAL “SAN LUIS GONZAGA” DE ICA
FACULTAD DE INGENIERIA AMBIENTAL Y SANITARIA
ESCUELA PROFESIONAL DE INGENIERIA AMBIENTAL Y SANITARIA
Dr. Pedro Córdova Mendoza 2
• El control automático ha desempeñado una función Vital en el avance de la ingeniería y la ciencia.
• Además de su extrema importancia en los sistemas de vehículos espaciales, de guiado de misiles, robóticos y similares, el control automático se ha vuelto una parte importante e integral de los procesos modernos industriales y de manufactura.
• Por ejemplo, el control automático es esencial en el control numérico de las máquinas herramienta de las industrias de manufactura, en el diseño de sistemas de pilotos automáticos en la industria aeroespacial, y en el diseño de automóviles y camiones en la industria automotriz.
INTRODUCCION

Dr. Pedro Córdova Mendoza 3
• También es esencial en las operaciones industriales como en el control de presión, temperatura, humedad, viscosidad y flujo en las industrias de proceso.
• Debido a que los avances en la teoría y la práctica del control automático aportan los medios para obtener un desempeño óptimo de los sistemas dinámicos, mejorar la productividad, aligerar la carga de muchas operaciones manuales repetitivas y rutinarias, así como de otras actividades, casi todos los ingenieros y científicos deben tener un buen conocimiento de este campo.
INTRODUCCION

Dr. Pedro Córdova Mendoza 4
• El primer trabajo significativo en control automático fue el regulador de velocidad centrífugo de James Watt para el control de la velocidad de una máquina de vapor, en el siglo XVIII. Minorsky, Hazen y Nyquist.
• En 1922, Minorsky trabajó en los controladores automáticos para dirigir embarcaciones, y mostró que la estabilidad puede determinarse a partir de las ecuaciones diferenciales que describen el sistema.
• En 1932, Nyquist diseñó un procedimiento relativamente simple para determinar la estabilidad de sistemas en lazo cerrado, con base en la respuesta en lazo abierto en estado estable cuando la entrada aplicada es una senoidal.
HISTORIA
Dr. Pedro Córdova Mendoza 5
• En 1934, Razen, quien introdujo el término servomecanismos para los sistemas de control de posición, analizó el diseño de los servomecanismos con relevadores, capaces de seguir con precisión una entrada cambiante.
• Durante la década de los cuarenta, los métodos de la respuesta en frecuencia hicieron posible que los ingenieros diseñaran sistemas de control lineales en lazo cerrado que cumplieran con los requerimientos de desempeño. A finales de los años cuarenta y principios de los cincuenta, se desarrolló por completo el método del lugar geométrico de las raíces propuesto por Evans.
HISTORIA

Dr. Pedro Córdova Mendoza 6
• Conforme las plantas modernas con muchas entradas y salidas se vuelven más y más complejas, la descripción de un sistema de control moderno requiere de una gran cantidad de ecuaciones. La teoría del control clásica, que trata de los sistemas con una entrada y una salida, pierde su solidez ante sistemas con entradas y salidas múltiples.
• Desde alrededor de 1960, debido a que la disponibilidad de las computadoras digitales hizo posible el análisis en el dominio del tiempo de sistemas complejos, la teoría de control moderna, basada en el análisis en el dominio del tiempo y la síntesis a partir de variables de estados, se ha desarrollado para enfrentar la creciente complejidad de las plantas modernas y los requerimientos limitativos respecto de la precisión, el peso y el costo en aplicaciones militares, espaciales e industriales.
HISTORIA

Dr. Pedro Córdova Mendoza 7
• Durante los años comprendidos entre 1960 y 1980, se investigaron a fondo el control óptimo tanto de sistemas determinísticos como estocásticos, y el control adaptable, mediante el aprendizaje de sistemas complejos. De 1980 a la fecha, los descubrimientos en la teoría de control moderno se centraron en el control robusto, el control de Roa y temas asociados.
• Ahora que las computadoras digitales se han vuelto más baratas y más compactas, se usan como parte integral de los sistemas de control. Las aplicaciones recientes de la teoría de control moderna incluyen sistemas ajenos a la ingeniería, como los biológicos, biomédicos, económicos y socioeconómicos.
HISTORIA

Dr. Pedro Córdova Mendoza 8
* El control clásico está pensado para sistemas: Continuos – Lineales – Invariantes en el tiempo.
* Y el control moderno para sistemas Digitales - lineales o no lineales - generalmente usan técnicas de espacio de estado.
CONTROL CLÁSICO vs CONTROL MODERNO

Dr. Pedro Córdova Mendoza 9
• El control clásico hace uso de los métodos de regulación tales como: sistemas mecánicos, hidráulicos, neumáticos o eléctricos y electrónicos.
•La característica principal del control clásico es que todas las señales son continuas y que los sistemas son lineales. Si no son lineales, se realizan estrategias de linealización.
•Los sistemas que conforman al control clásico son univariables y lo mas importante son invariantes en el tiempo.
CONTROL CLASICO

Dr. Pedro Córdova Mendoza 10
* El Control Moderno se diferencia del control clásico desde la llegada de los sistemas digitales.
• El procesador es la principal herramienta del Control Moderno, dando la posibilidad de implementar controles de sistemas no lineales y multivariales.
• El Control Moderno se forma a partir de varias ramas de estudio, siendo las mas importantes, El Control Adaptativo, El Control Robusto y El Control Inteligente.
* El Control Robusto busca independizar el control de posibles incertidumbres en el modelo de la planta.
CONTROL MODERNO

Dr. Pedro Córdova Mendoza 11
• El Control Inteligente se basa el las técnicas de inteligencia artificial, que tratan de emular las estrategias del pensamiento humano, usando el procesamiento digital.
• Algunas de ellas son la lógica difusa, las redes neuronales, los algoritmos genéticos.
• El Control Adaptativo busca resintonizar de forma automática el sistema de control ante variaciones de las características físicas de la planta. Matemáticamente independizan el control de las variaciones del modelo.
* En general el Control Digital se hace por medio de herramientas matemáticas como el Espacio de Estado. Las propiedades de herramientas como esta es que se hace irrelevante el número de entradas y salidas (Multivariable).
CONTROL MODERNO

Dr. Pedro Córdova Mendoza 12
• SISTEMA: Conjunto de elementos físicos, relacionados, que afectan de determinada manera las señales que le entran, para transformarlas en otras que salen. Sistemas Mecánicos, Sistemas Físicos, Sistemas Biológicos.
• PLANTA: Sistema físico que debe ser controlado para que se lleve a cabo de manera satisfactoria una función determinada.
SISTEMA AUTOMATICO DE CONTROL
DEFINICIONES Y CONCEPTOS

Dr. Pedro Córdova Mendoza 13
• PROCESO: Es cualquier operación que deba controlarse. Procesos químicos, económicos, biológicos.
• CONTROL: Sistema que de alguna manera se la añade a la planta, donde la diferencia entre la entrada y la salida (el error) disminuya.
• ELEMENTO FINAL DE CONTROL: Es conocido como el actuador y es un elemento controlable que se acciona para regular la salida del sistema.
SISTEMA AUTOMATICO DE CONTROL
DEFINICIONES Y CONCEPTOS

Dr. Pedro Córdova Mendoza 14
• VARIABLE CONTROLADA: Variable que se desea mantener dentro de las especificaciones definidas para el sistema.
• VARIABLE MANIPULADA: Variable que se relaciona con la variable controlada a través de la dinámica de la planta.
• PERTURBACIÓN: Señal de entrada indeseable y aleatoria que tiende a afectar de manera negativa la salida de un sistema.
SISTEMA AUTOMATICO DE CONTROL
DEFINICIONES Y CONCEPTOS

Dr. Pedro Córdova Mendoza 15
• ERROR: Señal Resultante de la comparación entre la entrada y la salida.
• REALIMENTACIÓN: Conocida también como la retro-alimentación, se define como la variable resultante de la medición de la salida o variable controlada del sistema.
• REFERENCIA: Señal de entrada que define el valor deseado o consigna.
SISTEMA AUTOMATICO DE CONTROL
DEFINICIONES Y CONCEPTOS

Dr. Pedro Córdova Mendoza 16
• Con frecuencia se llama así a los sistemas de control retroalimentado. En la práctica, se utiliza indistintamente la denominación control retroalimentado ("feedback") o control de lazo cerrado("closed loop"). La señal de error actuante, que es la diferencia entre la señal de entrada y la de retroalimentación (que puede ser la señal de salida o una función de la señal de salida y sus derivadas), entra al controlador para reducir el error y llevar la salida a un valor deseado. Esta retroalimentación se logra a través de la acción de un operador (control manual) o por medio de instrumentos (control automático)
SISTEMA DE CONTROL DE LAZO CERRADO
(Close loop)

Dr. Pedro Córdova Mendoza 17
SISTEMA DE CONTROL DE LAZO CERRADO
(Close loop)

Dr. Pedro Córdova Mendoza 18
• Los sistemas en los que la salida no tiene efecto sobre la acción de control, se denominan sistemasde control de lazo abierto ("open loop"). En otras palabras, en un sistema de control de lazo abierto la salida ni se mide ni se retroalimenta para compararla con la entrada. Un ejemplo práctico loconstituye una lavadora de ropa domestica. El remojo, lavado y enjuague en la lavadora se cumplen por tiempos. La máquina no mide la señal de salida, es decir, la limpieza de la ropa.
SISTEMA DE CONTROL DE LAZO ABIERTO (Open loop)

Dr. Pedro Córdova Mendoza 19
SISTEMA DE CONTROL DE LAZO ABIERTO (Open loop)

Dr. Pedro Córdova Mendoza 20
• Se define como la propiedad que tienen los sistemas CL que permite que la variable controlada sea comparada (directa o indirectamente) con la referencia del sistema, de tal manera que pueda llevarse a cabo la acción de control.
• Una realimentación bien aplicada:• Incrementa la exactitud del sistema.• Reduce la sensibilidad de la salida a perturbaciones
externas y a las variaciones de los parámetros internos.
• Incrementa el ancho de banda del sistema, que se define como: el rango de funcionamiento en el cuál el sistema responde satisfactoriamente.
• Una realimentación aplicada mal, puede tender a la oscilación o a la inestabilidad.
REALIMENTACION

Dr. Pedro Córdova Mendoza 21
REALIMENTACION

Dr. Pedro Córdova Mendoza 22
• Un servomecanismo es un sistema formado de partes mecánicas y electrónicas que en ocasiones son usadas en robots, con parte móvil o fija. Puede estar formado también de partes neumáticas, hidráulicas y controlado con precisión. Ejemplos: brazo robot, mecanismo de frenos automotor, etc.
SERVOMECANISMOS
Dr. Pedro Córdova Mendoza 23
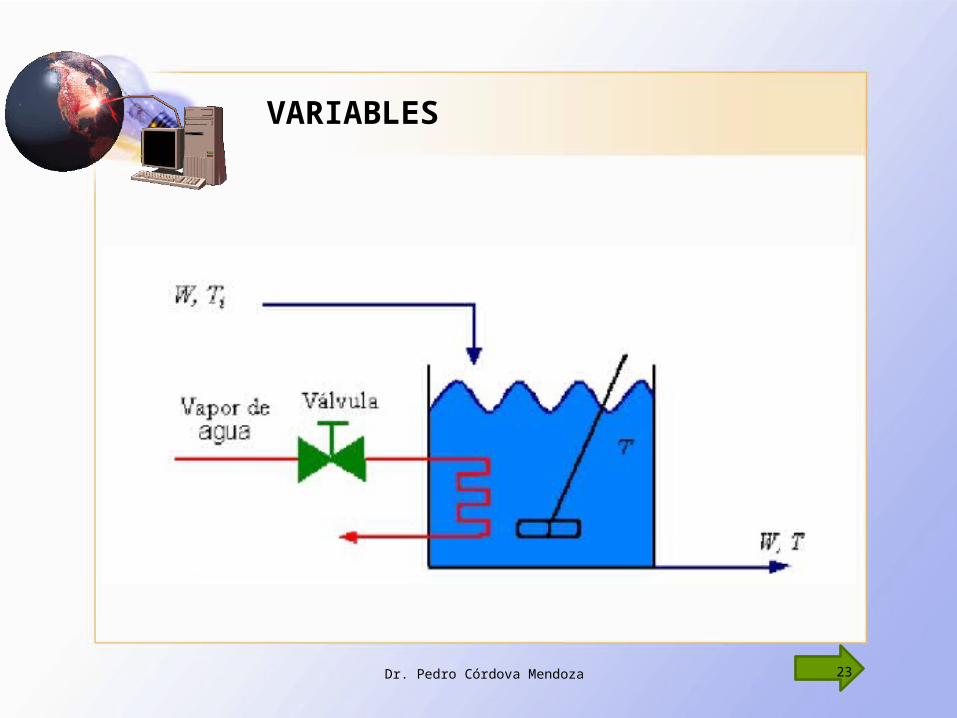
VARIABLES

Dr. Pedro Córdova Mendoza 24
Tenemos que cuidarlo esta en nuestras manos!!!!!!!
Gracias Gracias
Cel. 956-041243 Cel. 956-041243





























