Embed Size (px)
Citation preview

1
dismus la cattura del movimento – 1
TECNOLOGIE PER LA RIABILITAZIONE
Prof. Aurelio Cappozzo
Dipartimento di Scienze del Movimento Umano e dello SportLaboratorio di Bioingegneria
Istituto Universitario di Scienze Motorie - Roma
AA 2005-2006
Università degli Studi di Napoli "Federico II“
Facoltà di Ingegneria Corso di Laurea in Ingegneria Biomedica
lezione # 5la “cattura del movimento”
dismus la cattura del movimento – 2
Both movement and morphology are represented
the movement requires time variant information about the pose
the morphology may be time-invariant
Let’s separate the two problems !!
Yg
XgZg
t1t2
t3 tk
. . .
dismus la cattura del movimento – 3
movement data acquisition/estimation (variables)
anatomical data acquisition/estimation (parameters)
Data collection
Yg
XgZg
t1t2
t3 tk
. . .
dismus la cattura del movimento – 4
Data collection
movement data acquisition/estimation (variables)
Yg
XgZg
t1t2
t3 tk
. . .

2
dismus la cattura del movimento – 5
The term pose alludes to the location in space of a body
The description of the pose
Yg
XgZg
dismus la cattura del movimento – 6
In order to describe the pose of the bone, we substitute a complex morphology
with a simple and time invariant morphology (rigid body hypothesis)
The description of the pose
Yg
XgZg
dismus la cattura del movimento – 7
In order to describe the pose of the bone, we substitute a complex morphology
with a simple and time invariant morphology (rigid body hypothesis)
The description of the pose
Local system of reference(Local frame)
Global system of reference(Global frame)
Yg
XgZg
yl
xl
zl
dismus la cattura del movimento – 8
Motion capture
For each bone involved in the analysis,and in each sampled instant of time,
motion capture providestwo vectors,
i.e., six scalar quantities
zl
Yg
XgZg
Ol
lg t
lg�xl
yl
orientation vector
[ ] k,...,j;lzjg
lyjg
lxjg
ljg 1== θθθ�
[ ] k,...,j;ttt lzjg
lyjg
lxjg
ljg 1==t
position vector
This is, normally, done in an indirect fashion
3
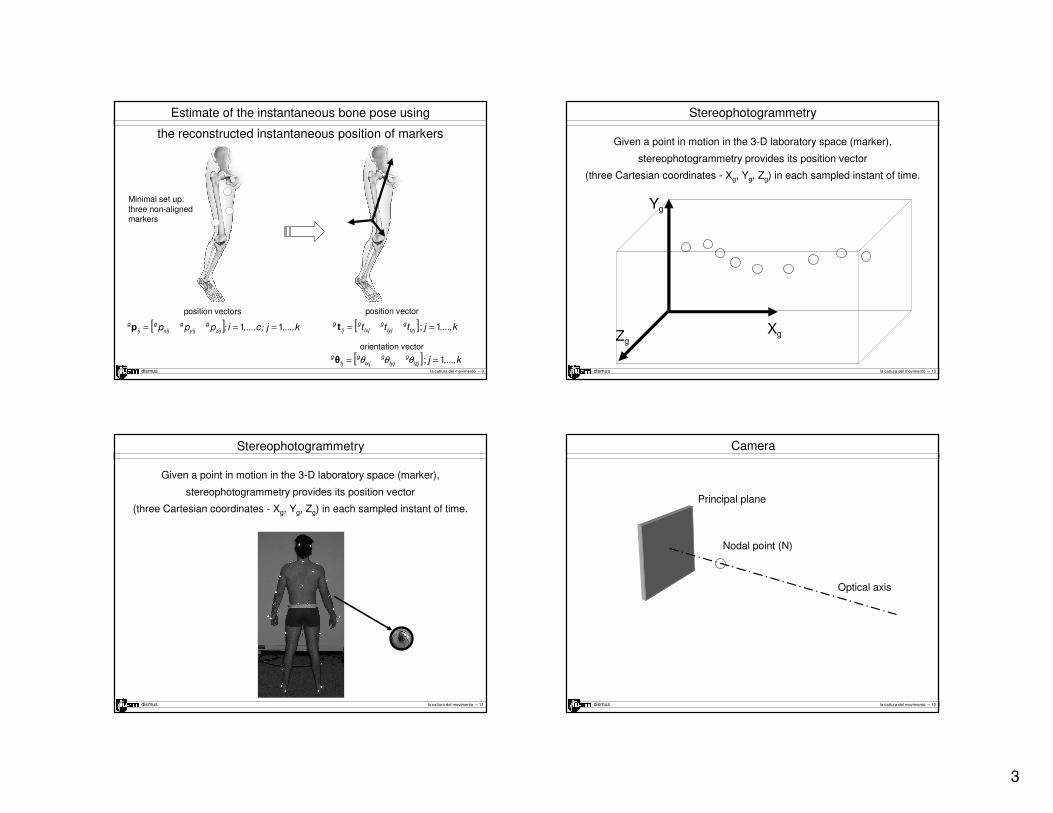
dismus la cattura del movimento – 9
Estimate of the instantaneous bone pose using
the reconstructed instantaneous position of markers
orientation vector
[ ] kjlzjg
lyjg
lxjg
ljg ,...,1; == θθθ�
[ ] kjttt lzjg
lyjg
lxjg
ljg ,...,1; ==t
position vector
[ ] kjcippp zijg
yijg
xijg
ijg ,...,;,...,; 11 ===p
position vectors
Minimal set up: three non-aligned markers
dismus la cattura del movimento – 10
Stereophotogrammetry
Given a point in motion in the 3-D laboratory space (marker),
stereophotogrammetry provides its position vector
(three Cartesian coordinates - Xg, Yg, Zg) in each sampled instant of time.
Yg
ZgXg
dismus la cattura del movimento – 11
Stereophotogrammetry
Given a point in motion in the 3-D laboratory space (marker),
stereophotogrammetry provides its position vector
(three Cartesian coordinates - Xg, Yg, Zg) in each sampled instant of time.
dismus la cattura del movimento – 12
Camera
Nodal point (N)
Principal plane
Optical axis

4
dismus la cattura del movimento – 13
Camera and object point
Nodal point (N)
Principal plane
Optical axis
Object point
dismus la cattura del movimento – 14
Camera and object point
Nodal point (N)
Principal plane
Optical axis
Object point
dismus la cattura del movimento – 15
Camera, object and image points
Nodal point (N)
Principal plane
Optical axis
Image point
Object point
dismus la cattura del movimento – 16
Image point
chip CCD
Image pane

5
dismus la cattura del movimento – 17
Stereophotogrammetry
N1
P
N2
dismus la cattura del movimento – 18
recording phase
Stereophotogrammetry
N1
P
N2
dismus la cattura del movimento – 19
recording phase
Stereophotogrammetry
N1
P
N2
dismus la cattura del movimento – 20
PN1
N2
recording phase
Stereophotogrammetry

6
dismus la cattura del movimento – 21
PN1
N2
reconstruction phase
Stereophotogrammetry
dismus la cattura del movimento – 22
PN1
N2
reconstruction phase
Stereophotogrammetry
dismus la cattura del movimento – 23
PN1
N2
reconstruction phase (with errors)
Stereophotogrammetry
dismus la cattura del movimento – 24
Object point position reconstruction has been achieved by using the following information:
• Global camera position and orientation• Local position of the nodal points
• Local position of the image points measured variable (time variant)
P
N1
N2
reconstruction phase
Stereophotogrammetry
calibration parameters (time invariant)

7
dismus la cattura del movimento – 25
Analytical stereophotogrammetry
Measured variables
Object point global coordinates
Calibration parameters
Mathematical model
dismus la cattura del movimento – 26
Position and orientation of a camera
N
y
z
x
Yg
XgZg
dismus la cattura del movimento – 27
pp
gθθθθp
N
y
z
x
Position and orientation of a camera
Yg
XgZg
pp (3 numbers)
gθθθθp (3 numbers)
parameters
dismus la cattura del movimento – 28
pp
gθθθθp
N
y
z
x
Position and orientation of a camera
Yg
XgZg
d
pp (3 numbers)
gθθθθp (3 numbers)
d (1 number)
parameters

8
dismus la cattura del movimento – 29
N
y
z
x
Image coordinates
yp
data
xp
ypxp
Yg
XgZg
dismus la cattura del movimento – 30
Mathematical model X, Y, Z
pp1, gθθθθp1, d1, pp2, gqp2, d2
xp1, yp1, xp2, yp2
Analytical stereophotogrammetry
dismus la cattura del movimento – 31
X, Y, Z
pp1, gθθθθp1, d1, pp2, gqp2, d2
xp1, yp1, xp2, yp2
System calibration
Mathematical model
dismus la cattura del movimento – 32
Calibration object
The control points (markers) are located in known positions. The system of reference with respect to which their location is given becomes the stereophotogrammetric global frame.
Y
Z
X

9
dismus la cattura del movimento – 33
Courtesy of NIH
Calibration object
dismus la cattura del movimento – 34
After a first approximation calibration using a simple and stationary calibration object, the markers mounted on a rigid wand are tracked while moving within the measurement volume.Calibration parameters are iteratively modified while optimizing an objective function.
Y
ZX
So named “dynamic calibration”
dismus la cattura del movimento – 35
So named “dynamic calibration”
Courtesy of NIHdismus la cattura del movimento – 36
X, Y, Z
pp1, gθθθθp1, d1, pp2, gqp2, d2
xp1, yp1, xp2, yp2
System calibration
Mathematical model

10
dismus la cattura del movimento – 37
The experiment
In each sampled instant of time
X, Y, Z
pp1, gθθθθp1, d1, pp2, gqp2, d2
xp1, yp1, xp2, yp2 Mathematical model
dismus la cattura del movimento – 38http://www.charndyn.com/Products/Products_Intro.html
Active markers
dismus la cattura del movimento – 39
The movement analysis laboratory
Yg
Xg
Zg
pg
Marker trajectory reconstruction
dismus la cattura del movimento – 40
Determination of the instantaneous bone pose using
the reconstructed instantaneous position of markers
?
orientation vector
[ ] kjlzjg
lyjg
lxjg
ljg ,...,1; == θθθ�
[ ] kjttt lzjg
lyjg
lxjg
ljg ,...,1; ==t
position vector
[ ] kjcippp zijg
yijg
xijg
ijg ,...,;,...,; 11 ===p
position vectors

11
dismus la cattura del movimento – 41
Yg
Xg
ZgB
A
C
A simple example
the position vectors or three non-aligned markers are given
dismus la cattura del movimento – 42
Yg
Xg
Zg
A
B
C
Determination of the pose of a local set of axes
dismus la cattura del movimento – 43
Yg
Xg
Zg
A
B
C
1. Definition of a plane2. Definition of two orthogonal axes on that plane3. The third axis is orthogonal to the former two axes
Determination of the pose of a local set of axes
dismus la cattura del movimento – 44
Yg
Xg
Zg
A
B
C
yl
zl
1. Definition of a plane2. Definition of two orthogonal axes in that plane3. The third axis is orthogonal to the former two axes
Determination of the pose of a local set of axes

12
dismus la cattura del movimento – 45
Yg
Xg
Zg
A
B
C
yl
zl xl
1. Definition of a plane2. Definition of two orthogonal axes on that plane3. The third axis is orthogonal to the former two axes
Determination of the pose of a local set of axes
Appendix
dismus la cattura del movimento – 46
Determination of the instantaneous bone pose using
the reconstructed instantaneous position of markers
This local frame is referred to as marker-cluster technical frame
yc
zc
xc
dismus la cattura del movimento – 47
Determination of the poses of the marker-cluster technical frames
mathematicaloperatoryg
xg
zg
orientation vector
[ ] kjczjg
cyjg
cxjg
cjg ,...,1; == θθθ�
[ ] kjttt czjg
cyjg
cxjg
cjg ,...,1; ==t
position vector
[ ] kjcippp zijg
yijg
xijg
ijg ,...,;,...,; 11 ===p
position vectors
yc
zc
yc
xc
zc
yc
xc
zcC=3
Minimal set up: three non-aligned markers
xc
dismus la cattura del movimento – 48
Determination of the poses of the marker-cluster technical frames
yg
xg
zg
orientation vector
[ ] kjczjg
cyjg
cxjg
cjg ,...,1; == θθθ�
[ ] kjttt czjg
cyjg
cxjg
cjg ,...,1; ==t
position vector
[ ] kjcippp zijg
yijg
xijg
ijg ,...,;,...,; 11 ===p
position vectors
yc
xczc
yc
xc
zc
yc
xc
zcC>3
Redundant set up
mathematicaloperator

13
dismus la cattura del movimento – 49
Determination of the poses of the marker-cluster technical frames
yg
xg
zg
orientation matrix
k,...,jcjg 1; =R
[ ] kjttt czjg
cyjg
cxjg
cjg ,...,1; ==t
position vector
[ ] kjcippp zijg
yijg
xijg
ijg ,...,;,...,; 11 ===p
position vectors
yc
xczc
yc
xc
zc
yc
xc
zcC>3
Redundant set up
mathematicaloperator
dismus la cattura del movimento – 50
fine della lezione # 5
dismus la cattura del movimento – 51
TECNOLOGIE PER LA RIABILITAZIONE
Prof. Aurelio Cappozzo
Dipartimento di Scienze del Movimento Umano e dello SportLaboratorio di Bioingegneria
Istituto Universitario di Scienze Motorie - Roma
AA 2005-2006
Università degli Studi di Napoli "Federico II“
Facoltà di Ingegneria Corso di Laurea in Ingegneria Biomedica
Appendixrigid-body pose determination
dismus la cattura del movimento – 52
A
B
C
yg
xg
zg
The rigid body

14
dismus la cattura del movimento – 53
A
B
C
yg
xg
zg
Apg
Bpg
Cpg
Point position vectors
dismus la cattura del movimento – 54
ylA
B
Cj
yg
xg
zg
Bpg
Apg
( )BA
BA
ppppj
gg
gg
−−=
Frame unity vectors determination
dismus la cattura del movimento – 55
yl
xl
A
C
yg
xg
zg
Bpg
Apg
( )( ) jpp
jppi×−×−=
BC
BCgg
ggi
B
Cpg
Frame unity vectors determination
j
dismus la cattura del movimento – 56
yl
zl xl
A
C
yg
xg
zg
jik ×=
Bj
ik
Frame unity vectors determination
15
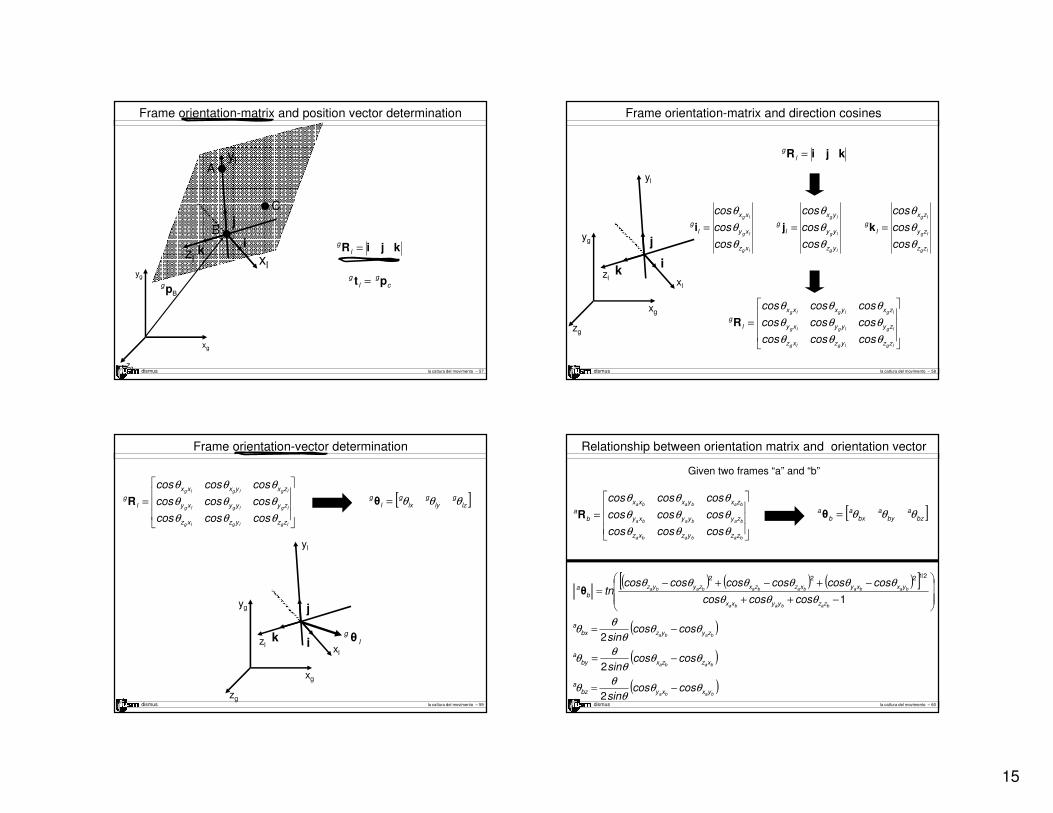
dismus la cattura del movimento – 57
yl
zl xl
A
C
yg
xg
zg
kjiR =lg
k
Bj
i
Bpg
Frame orientation-matrix and position vector determination
cg
lg pt =
dismus la cattura del movimento – 58
���
�
�
���
�
�
=
lglglg
lglglg
lglglg
zzyzxz
zyyyxy
zxyxxx
lg
coscoscoscoscoscoscoscoscos
θθθθθθθθθ
R
Frame orientation-matrix and direction cosines
kjiR =lg
lg
lg
lg
xz
xy
xx
lg
coscoscos
θθθ
=i
lg
lg
lg
yz
yy
yx
lg
coscoscos
θθθ
=j
lg
lg
lg
zz
zy
zx
lg
coscoscos
θθθ
=kyg
xg
zg
yl
zl xl
k
j
i
dismus la cattura del movimento – 59
���
�
�
���
�
�
=
lglglg
lglglg
lglglg
zzyzxz
zyyyxy
zxyxxx
lg
coscoscoscoscoscoscoscoscos
θθθθθθθθθ
R [ ]lzg
lyg
lxg
lg θθθ=�
Frame orientation-vector determination
yg
xg
zg
yl
zl xl
k
j
i lg�
dismus la cattura del movimento – 60
( ) ( ) ( )[ ]
( )
( )
( )baba
baba
baba
bababa
babababababa
yxxybza
xzzxbya
zyyzbxa
zzyyxx
\
yxxyxzzxzyyzb
a
coscossin
coscossin
coscossin
coscoscoscoscoscoscoscoscos
tn
θθθ
θθ
θθθ
θθ
θθθ
θθ
θθθθθθθθθ
−=
−=
−=
���
�
�
�
−++−+−+−
=
2
2
2
1
21222
�
���
�
�
���
�
�
=
bababa
bababa
bababa
zzyzxz
zyyyxy
zxyxxx
ba
coscoscoscoscoscoscoscoscos
θθθθθθθθθ
R [ ]bza
bya
bxa
ba θθθ=�
Relationship between orientation matrix and orientation vector
Given two frames “a” and “b”

16
dismus la cattura del movimento – 61
yl
zlxl
A
B
C
yg
xg
zg
Apg
Bpg
Cpg
In summary
ApgBpg
Cpg
Given the marker position vectors in the global frame:
We were able to estimate the position and orientation vectors of the local frame (marker cluster frame):
[ ] czg
cyg
cxg
cg θθθ=�
[ ] czg
cyg
cxg
cg ttt=t
In addition, the orientation matrix has been presented and its relationship with the orientation vector found.
dismus la cattura del movimento – 62
yl
zlxl
yg
xg
zg
In summary
The orientation of a rigid body can therefore be described by a position vector
cg�
or by an orientation matrix
lgR
dismus la cattura del movimento – 63
The end of Appendix




























