Embed Size (px)
Citation preview

3. SISTEME DE TRACŢIUNE ELECTRICĂ URBANĂ
3.1 Noţiuni generale
Transportul electric urban şi suburban, datorită avantajelor sale de a nu polua mediul ambiant şi de a asigura o capacitate relativ mare de transportare a călătorilor, constituie principalul mijloc de transport pentru oraşele mari şi mijlocii. Acest transport poate fi însă cu cale de rulare diferită: ghidată (cale ferată) cu roţi metalice – la tramvaie şi metrouri şi neghidată (carosabil) la troleibuze şi autobuze electrice cu roţi pneumatice, precum şi cu linie de contact şi alimentare diferită. Autobusele şi automobilele electrice sînt autonome şi n-au nevoie de linie de contact. Există de asemenea şi vehicule combinate, cu alimentare principală neautonomă de la linia de contact şi cu alimentare auxiliară autonomă de la un motor Diesel sau de la o baterie de acumulatoare.
Troleibuzele nu necesită o cale specială de rulare, nu îngreunează circulaţia celorlalte mijloace de transport, asigură o siguranţă a îmbarcării pasagerilor prin apropierea nemijlocită de trotuar, nu produc zgomot mare (fig.3.1). Liniile de contact ale troleibuzelor sunt împărţite în secţii de 1-2 km, izolate între ele şi alimentate de la barele substaţiei prin fideri diferiţi. O astfel de alimentare asigură o fiabilitate mai înaltă a transportului, deoarece ruperea sau scurcircuitul unei secţii nu afectează celelalte secţii. Troleibuzele sunt acţionate de un singur motor de o putere 100 – 170 kw şi o tensiune de 600 – 750 V, iar troleibuzele articulate prevăd 2 motoare de 100 – 120 kw fiecare. Însă faţă de tramvaie troleibuzele necesită un consum de energie electrică relativ mai mare, precum şi cheltuieli de exploatare mai ridicate, datorate în primul rând uzurii intensive a roţilor pneumatice şi a transmisiilor mecanice cu cardan şi diferenţial mecanic. Fig.3.1
Transmisiile mecanice ale tramvaielor (fig.3.2) sunt bazate pe 2 roţi dinţate simple, la fel ca şi la locomotive, ceea ce măreşte randamentul şi fiabilitatea lor. Un vagon de tramvai conţine 4 motoare pentru fiecare osie de o putere de 45 kw, care se conectează deseori 2 câte 2 în serie şi încrucişat pentru a asigura o stabilitate mai înaltă la frânare şi o sincronizare a vitezei. La viteze mici frânarea recuperativă sau reostatică nu este eficientă, de aceea tramvaiele prevăd pentru aceste viteze o frânare electromagnetică de tip “patină”. Eficacitatea înaltă a tramvaielor este datorată mai mult de capacitatea mare de transportare a pasagerilor, care este de 1,5 – 2,5 ori mai mare decât la troleibuze, întrucât ele pot avea câteva vagoane (2 - 3), unul motor şi 1 – 2 remorcă. Având o cale de rulare separată, tramvaiele asigură o securitate relativ înaltă a călătorilor,

Fig.3.2 Tramvaie articulate TATRACea mai mare capacitate de transportare o are metroul - de 2 – 3 ori mai mare
decât la tramvaie, însă metroul necesită investiţii capitale mult mai mari, de aceea se practică în oraşe cu populaţie peste un milion de locuitori. Pentru a micşora aceste investiţii, la suburbiile oraşelor metroul se construieşte la suprafaţă (fig.3.3), iar în centru - în tuneluri subterane (fig.3.4). Şinele căii ferate la tramvaie şi metrouri simplifică linia de contact, deoarece ele îndeplinesc funcţia de conductor de întoarcere a curentului de tracţiune, iar la linia de contact este necesar doar un singur fir. Din motive de gabarit al tunelurilor subterane, la metrou acest fir este amplasat la sol, în afara căii de rulare - lateral şi paralel cu calea la 20 – 30 cm înălţime faţă de şinele de rulare. De aceea această linie de contact mai este numită a treia şină. În afară de aceasta şinele şi roţile metalice sunt însoţite de o uzură mai mică faţă de roţile pneumatice ale troleibuzelor. Însă roţile metalice produc un zgomot relativ mare. Pentru a micşora acest zgomot metroul din Paris, de exemplu, a fost echipat cu roţi pneumatice pe şine, care măresc totodată şi aderenţa cu calea de rulare. Fig.3.3 Metrou construit la suprafaţa terestră în suburbii

Metroul asigură tot odată şi viteze mai mari de deplasare, precum şi o siguranţă mai mare. Pentru aceasta rama de metrou este constituită numai din vagoane motoare (5 - 6), fiecare având 4 osii (2 boghiuri) – motoare de o putere de 70kw.
Fig.3.4 Staţie subterană de metro din ParisSistemele de tracţiune electrică urbană au parcurs aproximativ aceeaşi evoluţie,
ca şi cele feroviare. Iniţial troleibuzele, tramvaiele şi metroul erau acţionate de MCC cu excitaţie serie şi reglaj reostatic al vitezei. În generaţia a 2 reglajul reostatic a fost înlocuit cu reglaj electronic prin variator de curent continuu (choppere), mai întâi cu tiristoare obişnuite (anii 1980 - 1990), iar apoi cu tiristoare GTO şi tranzistoare (anii 2000). În generaţia modernă MCC sunt înlocuite cu motoare asincrone, alimentate de la un invertor autonom de tensiune.
În unele ţări occidentale au fost elaborate, de asemenea, nişte sisteme de transport urban rapid de tip lift orizontal cu căi de rulare la sol sau pe estacadă. Vehiculele reprezintă nişte cabine de 4 – 12 persoane, acţionate de motoare asincrone liniare de aproximativ 50 kw şi cu pernă pneumatică (fig.3.5). Aceste cabine rulează pe roţi pneumatice, fiind alimentate de la linia de contact 600 – 750 V. Staţiile pentru îmbarcarea pasagerilor sunt dispuse în afara căii principale în scopul deplasării fără oprire a celorlalte cabine. Chemarea şi comanda punctului de destinaţie se face personal de către călător în acelaşi mod ca la lifturi .
Fig.3.5Cabină de tip lift orizontal

3.2. Schema tipică de comandă şi reglare reostatică cu rele şi contactoare a troleibuzelor sovietice ZiU 9 (10)
3.2.1. Noţiuni generale şi regimuri de funcţionare
Partea electrică a troleibuzelor clasice ruseşti ZIU – 9, (10, 682) este constituită din 2 părţi : principală şi auxiliară. Partea auxiliară include acţionarea uşilor şi a generatorului de încărcare a bateriilor de acumulatoare de 24V, schema de iluminare şi semnalizare. Partea principală este alcătuită, la rândul ei, din 2 scheme separate electric : schema de forţă cu tensiune de funcţionare înaltă 550 - 600V şi schema de comandă cu tensiune joasă de 24 V.
Schema de forţă include motorul principal de tracţiune M1 cu excitaţie mixtă şi motoarele serviciilor auxiliare – al ventilatorului M2 şi compresorului M3, precum şi elementele de comutaţie şi comandă ale lor: întrerupătoare, comutatoare, relee, contactele de forţă ale controlerului reostatic (PK) cu acţionare electrică a arborelui său cu came, realizată printr-un servomotor (fig.3.6).
Schema de comandă de tensiune joasă asigură comanda şi protecţia motoarelor de acţionare, precum şi reglarea reostatică a vitezei motorului de tracţiune, alimentând bobinele contactoarelor şi releelor după un anumit algoritm, indicat în tabelul de regimuri şi comutaţii. Regimurile de funcţionare sunt determinate de controlerul de comandă (KB), acţionat de către pedala de mers şi de frânare a şoferului. Acest controler asigură următoarele regimuri:
1. Iniţial (O) sau pregătitor, care pregăteşte sistemul pentru pornire;2. Manevrare (M), care asigură la pornire viteze de manevrare până la 10km/h;3. Mers X1 prevăzut pentru viteze mici până la 34 – 40 km/h; 4. Mers X2 pentru viteze 40 – 60 km/h cu slăbire parţială a excitaţiei; 5. Mers X3, cu slăbirea maximă a excitaţiei mixte şi cu viteză de 60-70km/h;6. Frânare moderată T1;7. Frânare electrică intensivă T2.

Tabelul 3.1
Fig.3.6 Schema de tensiune înaltă a troleibuzelor ZIU 9 (10), regimurile şi diagrama de funcţionare a elementelor principale
3.2.2. Componenţa şi destinaţia echipamentului
Controlerul de comandă (KB–TK) are 6 poziţii fixe, corespunzătoare regimurilor 2-7. El conţine de asemenea înversorul (B1 – B2), care asigură înversarea curentului indusului motorului principal de tracţiune M1.
Controlerul reostatic (PK) asigură reglajul reostatic al curentului indusului M1 şi al curentului înfăşurării de excitaţie serie LM1C1-C2 în regimurile de mers. Acest controler are 12 contacte de putere (PK1 – PK12) utilizate în schema de forţă şi 8 contacte auxiliare, utilizate în schema de comandă (fig.3.7), precum şi 18 poziţii diferite (1 - 18) ( tabelul 3.1). Alături de contactele auxiliare PK sunt indicate poziţiile (regimurile) în care aceste contacte sunt închise, ceea ce uşurează mult analiza schemei. Acţionarea arborelui controlerului reostatic în cele 18 poziţii se efectuează cu ajutorul servomotorului reversibil (СД) de curent continuu cu două înfăşurări de excitaţie LMСД „Înainte” şi LMСД „Înapoi”. Schema mai conţine următoarele contactoare: 3 contactoare de linie ЛК1 – ЛК3, care asigură comanda circuitului indusului (principal); 3 contactoare de şuntare Ш1 – Ш3, care asigură reglarea curentului înfăşurării paralele de excitaţie LM1Ш1–Ш2; contactorul de şuntare P a reostatului principal de reglaj a vitezei, care conţine 2 secţii: una reglabilă R1 – R6 prin contactele PK1 – PK8 şi alta constantă R10, care pot fi unite în serie sau în paralel; contactorul de frânare T şi contactorul motorului compresorului КДК.

Schema mai conţine un şir de relee. În partea de forţă sunt utilizate: releul de curent maxim (PT), care asigură protecţia maximală de curent; releul de curent minim (PMT); releul de accelerare cu trei înfăşurări: una de forţă (PУ1) şi 2 de comandă (PУ2 şi PУ3); releul de control şi protecţie la dispariţia tensiunii liniei de contact cu 2 înfăşurări PH1 şi PH2, care comandă soneria H16. În partea de comandă sunt utilizate 2 relee de timp PB, PB1, primul fiind folosit la pornire, iar al doilea la frânare.
Ca elemente de comutaţie sunt folosite întrerupătorul automat QF şi comutatoarele diferitor circuite S1 – S10
Fig.3.7 Schema de comandă şi de tensiune joasă a troleibuzelor ZIU

3.2.3. Principii de funcţionare la pornire şi la reglarea vitezei
La apăsarea pedalei de mers până în poziţia de manevrare M se închid următoarele contacte ale controlerului de comandă: KB(M–3) (5–7), KB(M–3) (11–12) şi KB(M–1) (5–26). Ca urmare acţionează contactoarele de linie ЛК1 şi ЛК2, care conectează indusului motorului M1 la linia de contact cu rezistenţa sumară maximă, datorată conectării în serie a secţiilor reostatului R1-R6 şi R10 şi includerii temporare a rezistenţelor de frânare dinamică R12, R13, R21. Concomitent cu aceasta, acţionează şi un releu de timp PB, care peste o pauză de 0,7 – 0,8 s alimentează bobina bobina contactorului de linie ЛК3, şuntând astfel rezistenţele de frânare R12, R13, R21. Aceasta permite creşterea curentului şi a vitezei motorului până la viteza de manevrare 5-10km/h.
La apăsarea pedalei de mers până în poziţia X1 a controlerului de comandă se închide contactorul acestui controler KB(1–3) (5–24), care alimentează la rândul său, înfăşurarea de excitaţie a servomotorului LMСД „Înainte” şi indusul lui. Acesta începe să rotească lin arborele controlerului reostatic PK, trecând consecutiv prin poziţiile intermediare 2–15 şi accelerând motorul până în poziţia fixă 15. procesul acesta de accelerare decurge în mod automat, şuntând consecutiv secţiile R1-R6 şi R10, contactate iniţial în serie, apoi în paralel, când acţionează PK9 în poziţia 8, conform ordinii tabelului de comutaţii. În poziţia 13 reostatul este şuntat complet prin contactorul P. În poziţia 14 se deconectează contactorul Ш1, care introduce în înfăşurarea paralelă de excitaţie rezistenţa R16 şi asigură prima treaptă de slăbire a fluxului. În poziţia 15 se închide PK10, care şuntează parţial şi înfăşurarea serie de excitaţie, micşorând fluxul acesteia cu 28%. Poziţia 15 se fixează prin închiderea contactorului auxiliar PK 15-18 şi acţionarea stop – releului CP, care deconectează servomotorul CД.
În cazul când pedala de mers este apăsată până în poziţia X2 sau X3 contactele controlerului de comandă KB(M-1), KB(2) sau KB(3) şi ale controlerului reostatic PK15-18, PK17-18 sau PK18 comandă în mod analogic stop - releul CP şi servomotorul CД, micşorând şi mai mult fluxul înfăşurării serie de excitaţie – corespunzător cu 47%, 60% şi 69% (prin PK6, PK11 şi PK12). Fixarea poziţiilor 17 şi 18 se efectuează în acelaşi mod.
Dacă pedala de mers se reîntoarce în poziţia iniţială, contactoarele de linie deconectează motorul de la reţea, lăsând troleibuzul să se deplaseze din inerţie. Contactul normal – închis ЛК1 inversează servomotorul СД, care aduce arborele controlerului reostatic până în poziţia 2 ,care se fixează din nou prin PK2-18.
3.2.4. Principiul de funcţionare la frânare
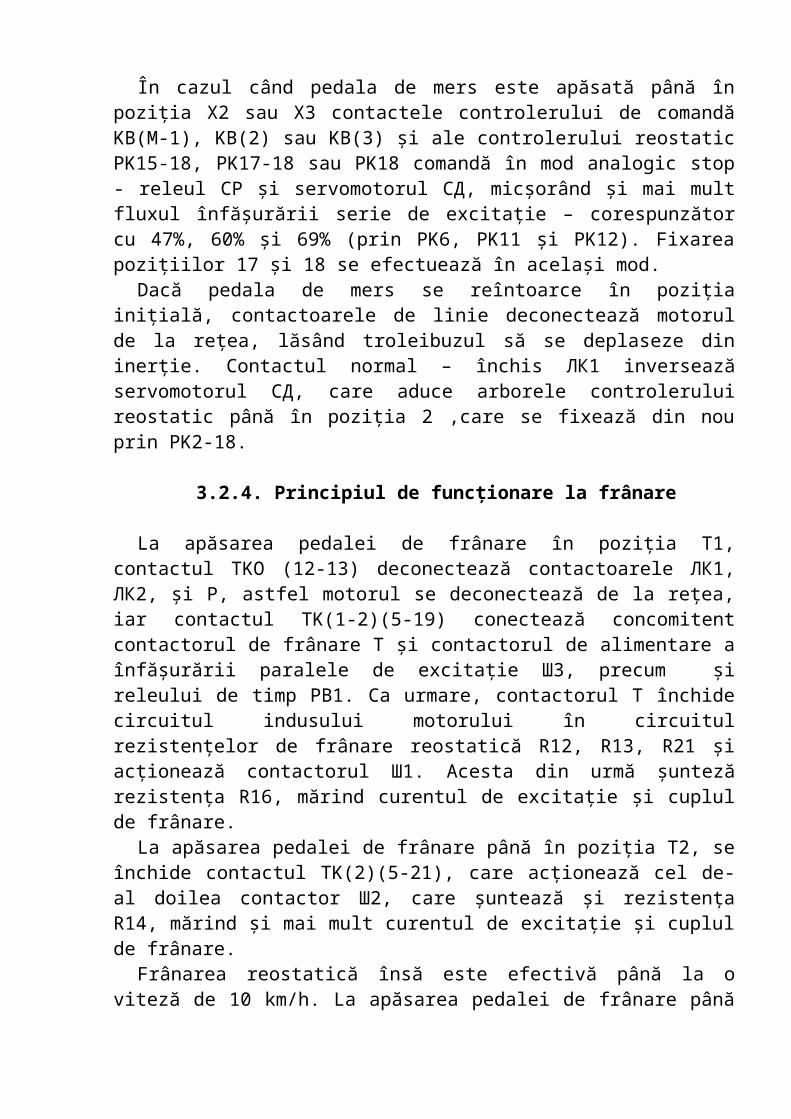
La apăsarea pedalei de frânare în poziţia T1, contactul TKO (12-13) deconectează contactoarele ЛК1, ЛК2, şi P, astfel motorul se deconectează de la reţea, iar contactul TK(1-2)(5-19) conectează concomitent contactorul de frânare T şi contactorul de alimentare a înfăşurării paralele de excitaţie Ш3, precum şi releului de timp PB1. Ca urmare, contactorul T închide circuitul indusului motorului în circuitul rezistenţelor de frânare reostatică R12, R13, R21 şi

acţionează contactorul Ш1. Acesta din urmă şunteză rezistenţa R16, mărind curentul de excitaţie şi cuplul de frânare.
La apăsarea pedalei de frânare până în poziţia T2, se închide contactul TK(2)(5-21), care acţionează cel de-al doilea contactor Ш2, care şuntează şi rezistenţa R14, mărind şi mai mult curentul de excitaţie şi cuplul de frânare.
Frânarea reostatică însă este efectivă până la o viteză de 10 km/h. La apăsarea pedalei de frânare până în poziţia ei maximă, acţionează paralel frânarea mecanică.
Când curentul scade până la 10–15A, se deconectează releul de curent minim PMT, care deconectează la rândul lui, contactorul Ш2, introducând rezistenţa R14 şi micşorând încălzirea înfăşurării paralele de excitaţie.
La întoarcerea pedalei de frânare în poziţie iniţială, peste o pauză mică de timp (0,5-0,7s), se deconectează contactoarele Ш3 şi T şi schema revine în poziţia iniţială.
3.3. Scheme tipice de comandă ale troleibuzelor cu tiristoare obişnuite ŞKODA-14
3.3.1. Noţiuni generale şi componenţa echipamentului
Troleibuzele cehe ŞKODA-14 şi ŞKODA-15 (articulate) (fig.3.8) cu variatoare de curent continuu (VCC-choppere) cu tiristoare obişnuite au fost unele din cele mai performante troleibuze din generaţia anilor 1990, de aceea au fost cumpărate de toate ţările est – europene, inclusiv de ţările pribaltice, Ucraina şi Moldova.
Fig.3.8 Troleibuze ŞKODA-15 şi ŞKODA-14 din generaţia anilor 1990
Schema simplificată de forţă a troleibuzelor ŞKODA–14 cu 2 tiristoare obişnuite şi cu 3 motoare – unul de tracţiune şi 2 auxiliare - este reprezentată în figura 3.9. Frecvenţa maximă de comutaţie a tiristoarelor constituie 400Hz, iar blocarea lor se efectuează cu ajutorul unui dispozitiv rezonant de comutaţie cu grup L-C, conectat paralel cu sarcina. În afară de cele 2 tiristoare, schema mai

conţine şi alte elemente: nişte diode de separare şi contactoare electromagnetice pentru realizarea unor conexiuni şi regimuri necesare:
- pornire şi reglare lină a tensiunii în zona vitezelor mici şi mijlocii; - slăbirea fluxului de excitaţie a motorului de 100kW în zona vitezelor mari; - frânarea electrică reostatică şi combinată electromecanică ;- frânarea pneumo – mecanică autonomă; Paralel cu captoarele 1 şi 2 de reţea este conectat un descărcător 3, care
protejează reţeaua la supratensiuni generate de echipamentul troleibuzului în cazuri anormale de funcţionare, sau invers. Cuplarea automată a aparatajului electric la reţea se efectuează cu ajutorul contactorului electromagnetic de linie 4, iar protecţia la scurtcircuit – cu ajutorul întrerupătorului automat 3.
Polaritatea tensiunii de alimentare a circuitelor principale şi auxiliare poate fi schimbată cu ajutorul unui comutator manual 6. Protecţia poluării reţelei cu armonici superioare, care pot apărea în troleibuz în rezultatul comutaţiei tiristoarelor, este asigurat de filtrul radiofrecvenţă înaltă 7.
Schema de forţă mai conţine un filtru de frecvenţe joase, realizat prin bateria de condensatoare 12 şi inductivitatea 9. Acest filtru stabilizează tensiunea de intrare a VCC la variaţiile posibile ale tensiunii reţelei sau la înrăutăţirea contactului captatoarelor 1 şi 2 în timp de iarnă.
Diodă de intrare 8 protejează VCC la o alimentare cu polaritate inversă, posibilă la o conectare greşită a captatoarelor sau a comutatorului 8, precum şi exclude descărcarea condensatorului 12 în reţea sau pe elementele auxiliare ale troleibuzului. Dioda 11 şi rezistenţa 10 protejează echipamentul de supratensiuni, care pot apărea în regimuri tranzitorii şi la deconectările inductivităţii 9.
Tensiunea de alimentare a chopperului este aplicată prin intermediul contactorului de mers 13, şuntat de o rezistenţă mare în scopul micşorării arcului electric la deconectarea acestuia.
VCC 15 este constituit din următoarele elemente : tiristorul principal 16; tiristor de comutaţie 17; inductivităţile de comutaţie cu şi fără miez magnetic 18 şi 19; condensatorul de comutaţie 20; rezistenţele de încărcare 24 şi descărcare 25 a condensatorului de comutaţie, diodele de separare 21 şi 22, dioda de fugă 23. În circuitul de sarcină al chopperului în regim de tracţiune intră următoarele elemente: inductivitatea de filtrare 27 a curentului de sarcină; înfăşurarea de excitaţie serie 31 a motorului , şuntată de nişte rezistenţe; dioda de separare 22, şuntată de rezistenţa de frânare 26; comutatorul de inversare a sensului curentului indusului 34, măsurat cu ajutorul traductorului 33 şi însuşi indusul motorului 35.
Slăbirea fluxului înfăşurării serie de excitaţie se efectuează prin rezistenţele 28, conectate de contactoarele 29 şi 30. Frânarea reostatică se realizează prin contactorul 32 şi rezistenţele de fânare 26, care sunt montate pe acoperişul troleibuzului pentru a se răci mai uşor.
Sistemul de comandă, reglare şi protecţie al troleibuzului este reprezentat prin blocul 37, la intrarea căruia se aplică traductorul de viteză 36 şi de tensiune 40. Semnalul de prescriere a curentului motorului de tracţiune este impus de controlerul de comandă 38, care include un reostat cu cursorul, legat de pedalele şoferului.

Fig.3.8 Schema de forţă a troleibuzelor ŞKODA-14 cu tiristoare obişnuite
Din echipamentul auxiliar fac parte: motorul ventilatorului 46, care antrenează totodată generatorul de reîncărcare a bateriilor de acumulatoare; motorul compresorului 54, care asigură presiunea necesară pentru frânarea mecanică, stabilizarea amortizatoarelor şi deschiderea uşilor; aerotermele de încălzire a salonului troleibuzului 59 şi 63, a cabinei şoferului 70 şi 71, şi a sticlei din faţă 69. Aceste încălzitoare au câte 2 trepte şi sunt conectate cu ajutorul unor comutatoare şi întrerupătoare.
Legătura (interfaţa) dintre blocul electronic principal şi elementele de comutaţie de tensiune joasă (contactoare şi relee) este asigurată de către un bloc electronic auxiliar 39.
3.2.2. Principiul de funcţionare al chopperului
Schema simplificată a chopperului şi a troleibuzului, cu aceeaşi numeraţie a elementelor componente, este reprezentată în figura 3.9. În timpul de conducţie al tiristorului principal T16, motorul principal de tracţiune este alimentat prin următorul circuit: . În acest timp condensatorul de comutaţie C20 se încarcă până la tensiunea prin acelaşi tiristor T16, şi printr-o rezistenţă paralelă R24, pregătindu-se astfel blocarea (închiderea) acestuia.
Blocarea tiristorului T16 începe odată cu aplicarea impulsului de comandă către tiristorul de comutaţie T17. La aprinderea acestuia pe lângă circuitul curentului motorului, indicat mai sus, mai apare un circuit, de descărcare a condensatorului de comutaţie C20: . Deoarece acest circuit este un circuit
rezonant (oscilant), curentul de descărcare a condensatorului C20 începe să crească sinusoidal cu frecvenţă relativ mare
,
fiind îndreptat împotriva curentului tiristorului T16. Când aceşti curenţi devin egali, T16 se blochează, curentul de sarcină fiind preluat de tiristorul de comutaţie T17, iar curentul de descărcare – de dioda inversă D16. După descărcarea condensatorului C20 şi transmiterea energiei lui inductivităţilor L18 + L19, condensatorul începe să se reâncarce cu o polaritate inversă a tensiunii şi cu un curent sumar . Evident, că în acest proces curenţii şi încep să scadă proporţional, iar rămâne aproximativ constant. Când devine din nou egal cu , dioda D16 se blochează, întrucât devine egal cu zero. După aceasta condensatorul C20 continuă să se reîncarce cu o polaritate inversă. Blocarea tiristorului T17 şi a diodei D21 are loc în momentul, când condensatorul se reîncarcă definitiv până la valoarea tensiunii de alimentare - şi când curentul
devine egal cu zero. Urmează apoi regimul de pauză cu chopperul blocat şi dioda D23 deschisă, care susţine conducţia curentului motorului în intervalul când
. După expirarea acestui regim se aprinde din nou tiristorul principal T16 şi procesele se repet.
Fig.3.9 Schema simplificată a chopperului şi a troleibuzelor ŞKODA-14
3.3.2. Regimul de frânare electrică reostatică
Pentru asigurarea unei siguranţe înalte de frânare sistemul Şkoda prevede 3 regimuri de frânare:
- frânarea electrică reostatică, comandată de pedala dreaptă de frânare în prima jumătate a poziţiei sale maximale;
- frânarea combinată electromecanică, în cea de-a doua jumătate a poziţiei pedalei drepte;
- frânarea pneumatico – mecanică autonomă sau de rezervă prin ce-a dea doua pedală de frânare, plasată în stânga volanului.
Pentru realizarea frânării electrice, schema de forţă este modificată în aşa fel, încât în regim de frânare înfăşurarea serie este scoasă din circuitul indusului,

transformând motorul cu excitaţie serie în motor (generator) cu excitaţie paralelă şi cu funcţionare posibilă în cadranul de frânare II (fig.3.10). Această transformare se efectuează prin deschiderea contactorului 32, prin care circulă curentul de excitaţie, reglat de acelaşi chopper, şi curentul de frânare IF , determinat de tensiunea electromotoare E0 : . Datorită faptului, că tensiunea chopperului în acest regim UC = UE < E0 , dioda 22 este blocată, de aceea curentul de frânare trece prin rezistenţa de frânare R26
< 0 .
Modificarea intensităţii şi a cuplului negativ de frânare în acest caz se efectuează cu acelaşi chopper, care reglează curentul înfăşurării paralele de excitaţie şi tensiunea electromotoare E0 în funcţie de poziţia pedalei drepte de frânare a şoferului: Fig.3.10 Caracteristici mecanice
, deoarece IF < 0. de tracţiune şi de frânare reostatică
3.3.3. Sistemul de reglare automată al chopperului
Sistemul de reglare automată (SRA) al chopperului troleibuzelor ŞKODA, la fel ca şi la alte mijloace de transport, are unele particularităţi importante:
1) Ca parametru principal de reglare, stabilizare şi limitare automată a SRA este ales curentul indusului motorului şi nu viteza lui. Această se explică, în primul rând, prin faptul, că în tracţiune se cere o reglare lină a vitezei, sau o limitare flexibilă a acceleraţiei şi deceleraţiei mijloacelor de transport, care poate fi obţinută printr-o reglare şi limitare corespunzătoare a cuplului sau curentului motorului conform ecuaţiei fundamentale de mişcare: M – MR = J dΩ/dt.
În al doilea rând, limitarea curentului maximal al motorului micşorează scânteierile de sub periile colectorului şi temperatura rotorului, ceea ce asigură o protecţie electronică efectivă şi o creştere substanţială a termenului de funcţionare a lui. Ca dovadă în acest sens poate fi menţionată statistica Regiei de transport Electric Chişinău, conform căreea la troleibuzele ŞKODA n-a ars nici un motor de curent continuu din momentul introducerii lor în exploatare şi până în ziua de azi, cu toate că puterea lor este mai mică decât puterea motoarelor troleibuzelor ZIU.
2) Deoarece chopperul are un principiu de funcţionare discret, este raţional de ales şi un regulator corespunzător, (bipoziţional) de curent, altminteri ar fi fost necesare la ieşire convertoare analogo – discrete .
În legătură cu acestea schema structurală simplificată a SRA a chopperului troleibuzului ŞKODA -14 conţine un regulator bipoziţional de curent (RC), un traductor analogic (Hall) de curent (TC), un dispozitiv de limitare a curentului maximal (DLC), un element de prescriere (EP) a acceleraţiei şi deceleraţiei troleibuzului, la intrarea căruia este aplicat semnalul reostatului de prescriere RP
al controlerului de comandă, legat cu pedalele de mers şi de frânare ale şoferului (fig.3.11). Circuitul indusului motorului (CIM) este reprezentat printr-un element

aperiodic, iar chopperul (C) - printr-un element proporţional datorită frecvenţei şi rapidităţii înalte de funcţionare. Chopperul cu o astfel de structură a SRA serveşte pentru motor ca o sursă de curent .
Fig.3.11 Schema structurală a sistemului de reglare automată a chopperului.
Semnalul de prescriere a curentului este limitat în două cazuri anormale:- când viteza motorului depăşeşte valoarea maxim admisibilă (~65 km/h). Deoarece traductorul fotoelectronic de viteză are o funcţionare prin impulsuri, la ieşirea lui este conectat un convertor “frecvenţă / tensiune” precum şi un element de prag ;- când tensiunea reţelei se micşorează sub valoarea minim admisibilă, pentru care nu este garantată comutaţia normală a tiristoarelor.
Un astfel de SRA asigură o pornire lină a motorului cu acceleraţie constantă şi cu curent (cuplu) constant. Caracteristicile mecanice şi electromecanice artificiale ale motorului în acest caz sunt verticale cu mici pulsaţii, datorate zonei de histerezis a regulatorului de curent. Motorul în acest caz se alimentează de la o sursă de curent şi cuplu constant
3.4. Scheme tipice de comandă ale troleibuzelor cu tiristoare complet comandate GTO
3.4.1. Troleibuzele ŞKODA– 21, 22
Dezavantajul principal al variatoarelor de curent continuu cu tiristoare obişnuite constă în necesitatea utilizării dispozitivelor adăugătoare de comutaţie, care complică schema şi micşorează rapiditatea de funcţionare. Înlocuirea lor cu tiristoare complet comandate GTO a fost la sfârşitul anilor 1990 un pas înainte, care a permis o simplificare a schemei de forţă. Aceste tiristoare se deschid printr-un impuls pozitiv la electrodul de comandă al lor şi se închid printr-un impuls negativ (ca tranzistoarele). Pe baza acestor tiristoare au fost realizate chopperele troleibuzelor ŞKODA 21 (fig.3.12) şi ŞKODA -22 (articulat), care au avut cam aceleaşi principii, ca şi modificaţiile precedente.

Fig.3.12 Troleibuzul anilor 2000 ŞKODA -21 cu tiristoare GTO
O altă particularitate importantă a chopperelor acestor troleibuze o constituie realizarea, pe lângă frânarea electrică, reostatică şi pneumatică, unei frânări recuperative, care micşorează cu vre-o 5% consumul total de energie electrică. Acest consum este relativ mic din 2 motive principale:
1) Frânarea recuperativă prin inversarea curentului este posibilă doar la viteze mari, când t.e.m. a motorului în regim de generator depăşeşte valoarea constantă a tensiunii reţelei, întrucât numai în aşa caz curentul , iar puterea recuperată .
2) În cazul, când pe linie lipsesc mai mulţi consumatori (mai multe troleibuze) şi substaţia de tracţiune este înzestrată cu redresoare necomandate, energia recuperată condiţionează o creştere a tensiunii la linia de contact , ceea ce micşorează şi mai mult diapazonul şi eficienţa acestei frânări.
O particularitatea principală a sistemului de comandă, protecţie şi reglare a acestor troleibuze constă în realizarea lor pe bază de microprocesor (microcontroler), care permite mai multe funcţii, precum şi o programare sau testare cu ajutorul unui calculator.
Un alt avantaj al acestor troleibuze a fost determinat de posibilitatea de alimentare a lor atât de la linii de contact de 600V, cât şi de la linii de 750V(în Europa occidentală majoritatea liniilor au o astfel de tensiune). Troleibuzele ŞKODA– 21 au o singură secţie pentru pasageri şi un singur motor de tracţiune de o putere de 124 kW, iar ŞKODA – 22 – două secţii, 2 punţi motoare şi 2 choppere. Schema simplificată de forţă a modificaţie articulate este reprezentată în figura

3.13. Troleibuzul ŞCODA-22 are deja 5 uşi (3 late şi 2 înguste), 40 de scaune pentru pasageri şi o capacitate maximă de 140 de pasageri şi cântăreşte 17 tone. Cele 2 motoare asigură o putere de 2x120 kW la 600V şi o putere de 2x140 kW la 750V , care asigură o acceleraţie 1,2 m/s2 până la 40 km/h. Mersul înapoi este realizat cu un singur motor.
Conectarea chopperelor şi a motoarelor la sursa de alimentare este paralelă. Tiristorul comun de frânare recuperativă VT1 este conectat paralel cu dioda de intrare VD1. Transmiterea curentului de frânare recuperativă către acest tiristor se efectuează cu ajutorul diodelor de separare VD2.1 şi VD2.2. în cazurile, când ESTE SATISFĂCUTĂ CONDDDIŢIA .Când , se realizează doar frânarea reostatică în acelaşi mod, ca şi la troleibuzele ŞKODA – 14.
Fig.3.13 Schema simplificată a troleibuzelor ŞKODA-22 cu tiristoare GTO
3.4.2. Troleibuzele româneşti ROCAR şi ASTRA
În anii 1990 în România se produceau troleibuze ROCAR cu variatoare de curent continuu GTO, schema cărora a fost preluată de la tramvaiele timişorene Timiş 2 (fig,316), La începutul anilor 2000 însă întreprinderea românească, care producea aceste troleibuze, s-a unit cu compania ungară IKARUS, cunoscută după autobuzele cu aceeaşi marcă. În rezultat au început să se producă în Budapesta noi troleibuze cu tiristoare GTO şi cu denumirea ASTRA IKARUS în mai multe modificaţii (fig.3.14). Aceste troleibuze, la fel ca şi ŞKODA 21,22, aveau pentru tracţiune motoare de curent continuu cu viteză reglabilă, iar pentru serviciile auxiliare - compresor şi ventilator – motoare asincrone trifazate în scurtcircuit de câţiva kW şi cu turaţie constantă, alimentate de la convertoare statice de frecvenţă cu invertoare autonome şi tranzistoare IGBT. Aceste convertoare asigură totodată şi încărcarea automată a bateriei de acumulatoare , deoarece au mai multe ieşiri sau blocuri : 600/3x380 V, 50 Hz şi 600/28V curent continuu. Separarea galvanică a

circuitelor lor de tensiune înaltă şi tensiune joasă se efectuează pe baza principiului de modulaţie - transformator intermediar – demodulaţie (redresare).
Fig.3.14 Troleibuzul ASTRA IKARUS pe o rută din Bucureşti
Schema de forţă a troleibuzelor ASTRA IKARUS cu un chopper GTO este reprezentată în figura 3.15. Alimentarea acestui chopper se efectuează prin contactorul de linie(CL); întrerupătorul automat (QF); varistorul de protecţie la supratensiune (V); filtru radio–frecvenţăL1–C1–L2 ; ansamblul diode – tiristoare (ADT) D1–D4, T1–T2 –), care prin diode asigură o alimentare cu polaritate stabilă, indiferent de polaritatea tensiunii de intrare , iar prin tiristoarele obişnuite T1–T2 – frânarea recuperativă; filtrul circuitului intermediar (FCI) de frecvenţă joasă LFCI - CFCI; traductorul de tensiune a filtrului (TTF).
Fig.3.15 Schema de forţă a troleibuzelor ASTRA IKARUS cu tiristoare GTO

Chopperul este constituit dintr-un singur tiristor GTO – TG, iar tiristorul obişnuit TF este prevăzut pentru frânare reostatică adăugătoare în cazurile când lipsesc consumatorii în reţea şi tensiunea filtrului depăşeşte tensiunea reţelei cu 150V. Tiristorul GTO asigură în regim de mers reglarea curentului indusului motorului, iar în regim de frânare - curentul de excitaţie serie, transformată în excitaţie paralelă prin contactorul de frânare CF1. Frânarea este mixtă: recuperativă – la viteze mari, şi reostatică – la orice viteză mai mare de câţiva km/h. În ultimul caz se utilizează frânarea mecanică de serviciu.
Contactoarele CM1 – CM2 asigură regimul de mers înainte, iar CF1, CM3 – mers înapoi. Contactorul CF2 scoate din circuit rezistenţa de frânare odată cu scăderea vitezei.
Blocul de comandă şi control este realizat, de asemenea cu microprocesor şi cu regulator de curent. Microcontrolerul poate îndeplini funcţia de cutie neagră a vehiculului permiţând personalului să evalueze dinamica funcţionării troleibuzului înainte şi în momentul apariţiei defecţiunii.
3.5. Troleibuze moderne cu variatoare discrete de curent continuu cu tranzistoare
Dezavantajul principal al tiristoarelor GTO îl constituie coeficientul mic de amplificare în curent, ceea ce condiţionează utilizarea unor amplificatoare de putere mare în circuitul lor de comandă. Acest lucru complică schema, micşorează randamentul şi fiabilitatea chopperului. Tranzistoarele hibride IGBT sunt lipsite de astfel de dezavantaje. În momentul de faţă aceste tranzistoare au puteri suficiente ca să înlocuiască tiristoarele GTO, de aceea toate chopperele sau invertoarele troleibuzelor şi tramvaielor se execută cu astfel de tranzistoare. În figura 3.16 este reprezentată schema troleibuzelor ŞKODA-23 cu chopper cu un singur tranzistor şi 4 diode - una de fugă şi 3 de separare (în afară de diodele de protecţie de la intrare)
Schema electrică a troleibuzului ЗИУ-SKODA
Catedra EE
Liera Masa Scara
1:1
Coala 6 Coli 12
UTM gr. EI-991
Mod coala Nr. document semnat data
Elaborat
Conducător
Consultat
Mîndru S.Proţuc I.
M
M
W1
W2
F1
1PPD21
C7
R2
VD1
LR5 R3R4
VD2
K1
R5
R6
C8
C9
KV2.1
VD5
C11
R8
VD4
C13 R10
LR6
HPM3
K3 K4
RR1 RR2 RR3
RS1
RS2
5PPD21
HM1
R13
C16
BC
1.2
FU2
K7
RR4
FU3
K9
RR5
MP1
D2-282
FU4
K10
BLOCUL ELECTRIC 24V
BLOCUL ELECTRONIC
QF1
K8 KP1KM1
FU5
K11
KM2
K2
K6
VT1
GC1
FU1
Co
nvert
or
de
ten
siu
ne
co
ntin
uu 6
00V
/24V
1E1
2E13E1
R12
C15
VD6
RR
21
K5RR6
HPM2
VD7
C1
4
R1
1
VD6
C1
2
R
9
C1
C2
F3
F2
F0
F1
L1L2
Indecatorul tensiunii de întrare ВИП+15V/-7,5V
Măsuratorul tensiunii de întrare
Indecatorul tensiunii de întrare ВИП+15V/-7,5V
600V
VD1-VD4
C1VD5
VD6
TV1
VD7
C2
R1
CONTROLOR
VT1
VT2
Rt
TA1
Indecator de temperatură
Blocul a semnalului de
ieşire
corposul
+28V
-28V
INDECAŢIEIARNA/VARA
ВИП
Unom
Uînt
încălzire
protecţia
izolaţia
accedent
Schema de structură convertor de tensiune continuu 600V/28V
C6C4
C5
C3 C2 C1
LR3 LR1
LR4 LR2
R1
Consultat
Şef. catedra
Contr. Norm.
Proţuc I.Terzi I.
MODERNIZAREA SISTEMULUI DE ALIMENTARE CU ENERGIE ELECTRICĂ AL PARCULUI DE TROLEIBUZE №1 DIN ORAŞUL
CHIŞINĂU
Fig.3.16 Schema de forţă a troleibuzelor ŞKODA-23 cu tranzistor IGBT

Toate celelalte echipamente ale schemei de forţă sunt identice cu elementele schemei generaţiilor precedente ale troleibuzelor ŞKODA. Singura deosebire principală a acestei modificaţii este alimentarea unui motor de curent continuu cu excitaţie mixtă – serie - paralelă. Pentru alimentarea înfăşurării paralele de excitaţie este prevăzut un circuit adăugător.
O altă variantă a chopperelor cu tranzistoare a fost elaborată de un centru de cercetare şi implementare al Reţelei de Transport Electric Chişinău (conducător dl Râmbu I). Această variantă s-a dovedit a fi foarte simplă şi relativ ieftină, fiind destinată, în primul rând, modernizării troleibuzelor vechi ZIU cu excitaţie mixtă. EA conţine doar 2 tranzistoare IGBT : Q1 – pentru reglarea discretă a curentului indusului şi Q2 – pentru reglarea discretă a curentului înfăşurării paralele de excitaţie a motorului de tracţiune , precum şi nişte diode de separare şi de fugă VD1-VD5 (fig.3.17). Celelalte elemente ale schemei –întrerupătorul automat de protecţie QF, inductivităţile de filtrare a curentului de intrare L1 şi L2, contactoarele electromagnetice de comutaţie LK2, C2-C3 şi F, motorul cu rezistenţele de slăbire a fluxului de excitaţie serie R1-R2 şi de frânare reostatică R3 – sunt preluate din schema veche a troleibuzelor ZIU. Adăugător se introduce numai inductivitatea de filtrare a curentului indusului motorului.
Fig.3.17 Schema chopperului cu tranzistoare IGBT al RTE Chişinău
Principiile de funcţionare ale schemei în regim de mers şi de frânare reostatică nu se deosebesc de cele descrise mai sus, fiind realizate însă cu un număr redus de echipamente. Reglarea lină a tensiunii de alimentare şi a vitezei motorului se efectuează prin modificarea duratei relative de conducţie a tranzistorului principal

Q1. După aplicarea tensiunii nominale şi deschiderea continuă a acestui tranzistor, creşterea ulterioară a vitezei se obţine prin slăbirea discretă în 2 trepte a fluxului serie de excitaţie, realizată cu ajutorul contactoarelor C2 şi C3. Înfăşurarea paralelă de excitaţie în regim de mers este alimentată cu un curent nominal prin intermediul tranzistorului Q2, care stabilizează acest curent indiferent de variaţiile tensiunii din reţea sau ale rezistenţei înfăşurării la variaţia temperaturii ei. Diodele de fugă VD3 şi VD5 se deschid în intervalele de pauză dintre impulsuri, când se închid tranzistoarele Q1 şi Q2. Dioda VD4 protejează chopperul la o polaritate greşită a tensiunii de alimentare.
În regim de frânare electrică tranzistorul Q1 se blochează, iar contactorul de alimentare LK2 se deconectează, anulând totodată excitaţia serie. Regimul de generator al motorului este realizat prin deschiderea contactorului de frânare F şi prin reglarea curentului înfăşurării paralele de excitaţie cu ajutorul tranzistorului Q2. Energia electrică generată în acest regim este transformată în căldură pe rezistenţa de frânare R3, amplasată pe acoperişul troleibuzului.
Comanda şi reglarea automată a tranzistoarelor se realizează cu ajutorul unui microcontroler programabil, iar controlul şi afişarea regimurilor şi parametrilor principali – cu ajutorul unui indicator digital, amplasat în faţa şoferului.
Astfel de choppere sunt utilizează nu numai pentru modernizarea troleibuzelor vechi ZIU din parcurile RTE Chişinău, ci sunt vândute, de asemenea, în multe oraşe din Ucraina şi Rusia. Cu astfel de choppere a fost echipată o partidă mare de troleibuze noi de tipul ЮМЗ (Южный Машиностроительный Завод ), cumpărate de Primăria Chişinău din Dnepropetrovsc (Ucraina) la un preţ mai redus, datorită că ele au fost livrate fără choppere ucrainene . Aceste troleibuze noi cu variatoare moldoveneşti circulă astăzi pe mai multe rute din oraşul Chişinău (fig.3.18).
Fig.3.18 Troleibuze ucrainene ЮМЗ cu choppere moldoveneşti ale RTEC

3.6 Troleibuze ultramoderne cu motoare asincrone alimentate de la invertoare autonome cu frecvenţă variabilă
Ţinând cont de dezavantajele motoarelor de curent continuu, condiţionate de problemele de exploatare a colectorului lor, de preţul relativ mare, de masa şi gabaritele lor mari, precum şi de realizările moderne ale acţionărilor electrice de curent alternativ cu convertoare de frecvenţă, în tracţiunea electrică urbană, puţin mai târziu faţă de cea feroviară, în ultimii ani acţionările electrice reglabile de curent continuu au început să se înlocuiască cu acţionări asincrone reglabile în frecvenţă. În afară de această tendinţă actuală, la elaborarea troleibuzelor noi au mai fost adoptate şi alte tendinţe moderne, de exemplu :- alimentarea electromecanică cu generator de curent continuu a sistemului de tensiune joasă de 24 V şi încărcarea bateriei de acumulatoare este înlocuită cu alimentare statică cu convertor electronic 600/28 V :- motoarele nereglabile de curent continuu ale serviciilor auxiliare (compresorului şi pompei amplificatorului hidraulic al volanului) sunt înlocuite, de asemenea, cu motoare asincrone trifazate, alimentate de la convertoare de frecvenţă ;- pentru confortul călătorilor de vârstă înaintată se înlătură treptele de urcare – coborâre în troleibuz, coborând podeaua la un nivel foarte jos :- se desăvârşeşte aspectul exterior şi interior al troleibuzelor, făcându-le cât mai atractive şi cu o rezistenţă aerodinamică minimă ;- se prevăd surse autonome de alimentare pentru cazuri de dispariţie a tensiunii în reţeaua electrică principală sau de deplasare pe căi fără linie de contact – baterii adăugătoare de acumulatoare sau motoare Diesel;- se adoptă principii mai efective de transmitere mecanică a cuplului la roţi, în particular principiile tramvaielor .
În timpul de faţă există în diferite ţări multe întreprinderi industriale de producere a troleibuzelor. În spaţiul fost sovietic au înaintat mai mult în această direcţie asociaţia din Minsk „Belcomunmaş”, concernul ŞKODA (Chehia) şi ASTRA IKARUS (Ungaria). Ultima generaţie a troleibuzelor beloruse cu motor asincron de o putere de 185kW, alimentat de la un invertor cu frecvenţă variabilă, şi cu baterie adăugătoare de alimentare autonomă este reprezentată în figura 3.19.
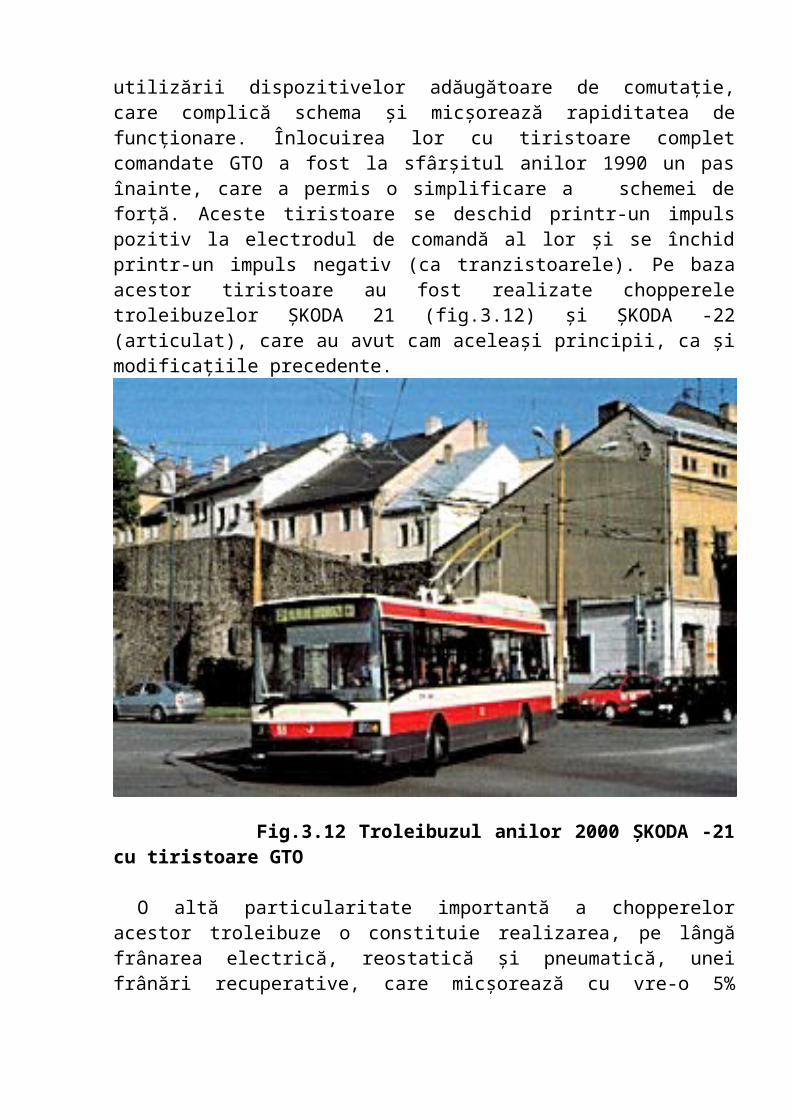
Fig.3.19 Troleibuzele beloruse BELCOMUNMAŞ şi MAZ 103 cu podea joasăUn troleibuz din penultima generaţie a troleibuzelor beloruse MAZ 103 cu
motor de curent continuu şi podea joasă a fost adus în Chişinău pentru reclamă şi testare .
Ultima generaţie a troleibuzelor ŞKODA-24 cu motor asincron de 210kW, alimentat de la un invertor autonom cu tranzistoare IGBT, este reprezentată în figura 3..20 .Aceste troleibuze au, de asemenea, o podea coborâtă,
Fig.3.20 Troleibuze ultramoderne ŞKODA-24 cu motoare asincrone de tracţiune
Troleibuzele ungare ASTRA IKARUS 412, 415T (fig.3.14), de asemenea, sunt echipate cu motor asincron trifazat în scurtcircuit, alimentat de la un invertor autonom cu tensiune modulată în frecvenţă înaltă. În ţările Europei de vest această echipare a avut loc mai demult, devenind un etalon pentru alte ţări. Creşterea capacităţii de transportare, confortul călătorilor, aspectul atractiv exterior şi interior, introducerea unor surse autonome de alimentare constituie unele din

performanţele de bază ale troleibuzelor vest europene . Drept exemplu în acest sens pot servi troleibuzele franceze din oraşul Nancy cu 2 motoare asincrone de 150kW şi cu un motor Diesel de rezervă de 200 c.p. (fig.3.21).
Fig.3.21 Troleibuz modern articulat cu 2 motoare asincrone din Nancy - Franţa
Toate invertoarele troleibuzelor moderne au la bază aceeaşi schemă de forţă, realizată cu 6 tranzistoare IGBT, şuntate de 6 diode inverse (fig.3.22). Al 7-lea tranzistor KT este destinat pentru frânarea reostatică a motorului asincron M.

Fig.3.22 Schema simplificată de forţă şi de reglare a curentului invertorului Parametrul principal de reglare automată al invertoarelor, la fel ca şi al
chopperelor, este curentul motorului de tracţiune. Însă în acest caz se măsoară, se reglează şi se limitează valoarea momentană a curentului fiecărei faze statorice, utilizând 3 transformatoare de curent şi 3 regulatoare discrete (bipoziţionale ) de curent. La intrarea fiecărui regulator se aplică curentul real din faza respectivă, care se compară cu valoarea sinusoidală de prescriere a acestui curent, notată cu steluţă. Dacă abaterea curentului real de la valoarea prescrisă este negativă, atunci regulatorul deschide tranzistorul impar al fazei respective, care asigură o creştere a curentului măsurat. În caz contrar se deschide tranzistorul par, care asigură o micşorare a curentului real. Ca urmare , în decursul unei semiperioade tranzistoarele invertorului se deschid şi se închid de multe ori, urmărind ca valoarea reală a curenţilor de fază să fie cât mai aproape de forma sinusoidală (fig.3.23). Deoarece frecvenţa maximă de comutare a tranzistoarelor este limitată, în practică se obţine o anumită eroare de supraveghere a formei sinusoidale, valoarea căreea este determinată de lăţimea buclei de histerezis a regulatoarelor discrete de curent. Fig.3.23
Reglarea frecvenţei de ieşire a invertorului se efectuează prin modificarea frecvenţei semnalelor de prescriere a curenţilor (aceste două frecvenţe sunt absolut egale), iar reglarea amplitudinii curenţilor de ieşire – prin modificarea amplitudinii semnalelor de prescriere. Un astfel de principiu de reglare frecvenţială se numeşte reglare în curent, care este raţional pentru controlul cuplului motorului de tracţiune, acceleraţiei şi deceleraţiei lui.

3.7 Principii şi variante de tramvaie şi metrouri clasice şi moderne
3.7.1 Tramvaie clasice
Tramvaiele şi metrourile, ca mijloace urbane de transport pe căi ferate, la fel ca şi troleibuzele, au istoria lor de dezvoltare. Primul tramvai a fost inventat de inginerul german Verner fon Siemens în anul 1881. De atunci tramvaiul a parcurs o cale lungă şi anevoioasă cu urcuşuri şi coborâşuri. Etapele de criză au fost condiţionate, în primul rând, de problemele cauzate de prezenţa căilor ferate prin mijlocul străzilor oraşelor cu număr mare de locuitori.Ca urmare, tramvaiele au fost înlăturate din multe oraşe mari şi mici, cum ar fi Londra, Paris, Hamburg, Stocholm, Chişinău şi multe altele.
În zilele de astăzi însă, datorită tehnologiilor moderne, tramvaiul a reînviat, urcând pe o nouă treaptă de dezvoltare - mult mai înaltă. El s-a dovedit a fi un mijloc efectiv, econom, convenabil şi fără pericol de accidentare sau aşteptare îndelungată în îngrămădirile şi îmbulzeala de automobile.
În momentul de faţă mai multe ţări produc tramvaie, însă în perioada Uniunii Sovietice şi a lagărului socialist liderul sau monopolul în această direcţie în Europa de Răsărit îl deţinea concernul ceh CKD (Pragha), care a elaborat şi a produs mai multe generaţii de tramvaie, cunoscute sub numele de TATRA. În anii 1970 o producţie în masă în ţările est europene şi în peste 20 de oraşe ale Uniunii Sovietice a avut-o vagonul de tramvai TATRA 3 (T3). Acest vagon avea 2 boghiuri cu 2 osii fiecare, fiind acţionate de 4 motoare de curent continuu cu excitaţie serie de o putere de 45 kW, conectate în serie 2 câte 2 din diferite boghiuri. O astfel de conectare asigura sincronizarea necesară a motoarelor, deoarece ele aveau o excitaţie comună şi un curent (cuplu) comun şi identic. Schema de comandă a acestor motoare prevedea o pornire şi reglare reostatică a vitezei lor, la fel ca şi la troleibuzele ZIU, utilizând un controler reostatic direct cu mai multe contacte de forţă şi de comandă.
Tramvaiele TATRA 3 aveau nişte culori specifice lor – galbenă – roşie – galbenă : galbenă în jumătatea de sus şi de jos, iar la mijloc o fâşie roşie. (fig.3.24). Multe din ele continuă să fie exploatate în diferite oraşe până în ziua de azi, cu toate că unele din ele au fost modernizate. Fig,3.24 Tramvaiul clasic TATRA 3

Concernul ceh CKD a produs în anii 1980 modificaţia TATRA 6, iar în anii 1990 – TATRA 7 (fig.3.25), care au fost puţin mai performante, deoarece reglarea reostatică a motoarelor de curent continuu a fost înlocuită cu o reglare electronică cu choppere tiristorizate, utilizând aceleaşi motoare de curent continuu, numai că de o putere de 4x50 kW = 200 kW. Aceste tramvaie erau relativ compacte, având o lungime de 15,3 m, lăţime de 2.5 m , înălţime de 3,1 m şi greutate de 20t, fiind prevăzute cu scaune pentru 40 de călători şi o capacitate de 160 de pasageri în picioare (fig.3.26). Ele dezvoltau o viteză maximă de 65 km/h.
Fig.3.25 Tramvaiul anilor 1990 TATRA 7 cu variatoare de curent continuu

Fig.3.26 Salonul interior al tramvaielor TATRA 7După destrămarea Uniunii Sovietice Chehia n-a mai livrat Rusiei şi Ucrainei
tramvaie TATRA, deoarece un tramvai TATRA 7 costa prea scump - 300000 de dolari. De aceea ruşii şi ucrainenii au fost nevoiţi să-şi elaboreze şi să-şi producă tramvaiele lor proprii. Latvia însă a primit în 1998 de la Banca mondială de reconstrucţie şi dezvoltare un credit de 8 mln de dolari pentru modernizarea tramvaielor TATRA 3. Pe bază de concurs a fost elaborat un proiect de modernizare, care prevedea înlocuirea elementelor principale ale carcasei şi interiorului salonului, precum şi schimbarea sistemului de acţionare reglabilă de curent continuu cu unul de curent alternativ cu 4 motoare asincrone în scurtcircuit, alimentate de la 2 invertoare autonome cu tranzistoare IGBT. Generatorul de alimentare cu tensiune joasă de 24 V a fost înlocuit cu convertor electronic cu 600/24 V , iar lămpile incandescente de iluminare - cu lămpi luminiscente tubulare, alimentate de la invertoare 24/220 V. 50 Hz. Partea electronică a echipamentului a fost proiectată şi produsă de firme din Elveţia şi Ungaria. În rezultat în anii 1999-2001 în Riga au fost modernizate 143 de vagoane de tramvai TATRA 3A, cheltuind pentru fiecare 80000 de Euro. După vizită primarului Moscovei Lujcov I la Riga, a fost încheiat un contract de livrare a echipamentului electric şi electronic pentru modernizarea în anii 2003-2006 a 105 tramvaie TATRA 3 din depourile Moscovei .
În anii 1990 mai multe întreprinderi din Rusia au încercat să proiecteze şi să producă tramvaie proprii, însă nu doar ca o copie a modificaţiei TATRA 7, ci mai performante decât aceasta. Obiectivul principal al modernizării a fost acelaşi, pe care l-a parcurs puţin mai târziu Latvia şi companiile europene în TATRA 3A - înlocuirea motoarelor de curent continuu cu motoare asincrone de curent alternativ, alimentate de la invertoare autonome de frecvenţă variabilă. La acest proiect au lucrat paralel o grupă de întreprinderi din Ural (Ecaterinburg) şi Novosibirsc (echipamentul electronic), precum şi din Sank-Peterburg. În rezultat în Ural a fost

elaborat primul exemplar al tramvaiului „Spectr 1” (71-135) cu 4 motoare asincrone de 54 kW, alimentate de la invertoare cu tiristoare obişnuite Însă aceste invertoare au fost realizate cu elemente componente de producţie rusească din anii 1990, care n-au avut o fiabilitate necesară, de aceea tramvaiul „Spectr 1” n-a rezistat la încercări reale şi a „murit ca un copil în timpul naşterii” .
Uzina de tramvaie din Sank-Peterburg a elaborat în anii 1998 -2001 4 tramvaie compacte ЛМ – 2000 cu acţionare electrică asincronă reglabilă în frecvenţă şi de aceleaşi gabarite ca TATRA 3, deoarece canalele de reparaţie din depourile Moscovei erau prea înguste pentru tramvaie moderne cu gabarite mai mari. În figura 3.27 este reprezentat tramvaiul ЛМ – 2000 cu 4 motoare asincrone de 60 kW fiecare. Fig.3.27 Tramvaiul ЛМ – 2000
Aceste tramvaie au fost implementate pe rutele oraşului Moscova, însă multiplicarea lor n-a mai avut loc din aceleaşi cauze, precum şi din alte motive. De aceea primarul Lujcov I a încheiat cu uzina din Lugansc (Ucraina de Răsărit) în 2002 un contract de proiectare şi producere a unor tramvaie noi cu gabarite compacte pentru a se potrivi cerinţelor depourilor Moscovei. În rezultat în 2003 a apărut pe rutele Moscovei tramvaiul ucrainean ЛТ-5 (fig.3.28,a) - o modificaţie a tramvaielor ЛТ-10 , care se produceau la acel moment de uzina din Lugansc cu motoare de curent continuu de 4x65 kW. Preţul unui astfel vagon era de 135000 de Euro.
În figura 3.28,b este arătat un boghiu al tramvaiului ЛТ-5 cu frâna electromagnetică de şină între osiile motoare.

Fig.3.28 Tramvaiul ЛТ-5 (a) şi imaginea unui boghiu al lui (b) b)
În afară de Lugansc, în Ucraina există şi alte întreprinderi, care produc tramvaie. Dintre acestea fac parte uzina УКВЗ din Crivoi Rog cu tramvaiele KTM 19K, (fig.3.29) KTM 21, ЮМЗ din Dnepropetrovsc cu tramvaiele K1 (fig.3.30).
Fig,3,29 Tramvaiul KTM 19K (УКВЗ) Fig.3.30 Tramvaiul K1 (ЮМЗ)Toate aceste tramvaie ucrainene au un dizain modern, însă sunt echipate cu 4
motoare de curent continuu de 50 kW, alimentate de la choppere cu tiristoare. Din aceeaşi clasă, însă cu chopper diferit fac parte şi tramvaiele româneşti Timiş 2A, schema de forţă a cărora este reprezentată în figura 3.31,a. Ele sunt acţionate însă numai de 2 motoare de curent continuu - câte unul pentru fiecare boghiu (cărucior). În figura 3.31,b este arătată schema unui chopper cu 2 tiristoare GTO, dintre care unul asigură reglajul curentului indusului, iar altul curentul de excitaţie. Dioda D1
este prevăzută pentru regimul de frânare reostatică, iar diodele D2 – D4 sunt diode de separare şi de fugă, deoarece ambele tiristoare au o funcţionare intermitentă.
Contactoarele K4 – K7 sunt conectate în punte, asigurând regimul de mers înainte, înapoi şi de frânare reostatică sau recuperativă.
a)
b) Fig.3.31 Scheme de forţă ale tramvaiului românesc Timiş 2 şi ale chopperului lui
3.7.2 Tramvaie ultramoderne cu motoare asincrone şi invertoare autonome de frecvenţă variabilă
În tramvaiele şi metrourile moderne occidentale, utilizate în Germania, Franţa, Elveţia şi alte ţări din Uniunea Europeană, motoarele de curent continuu demult au fost înlocuite cu motoare asincrone în scurtcircuit, iar chopperele - cu invertoare autonome de tensiune modulată în frecvenţă înaltă (PWM) şi cu tranzistoare IGBT sau tiristoare GTO. Schema de forţă a unui vagon de tramvai cu tiristoare GTO este reprezentată în figura 3.32. Comanda acestui vagon este asigurată de 2 microprocesoare unul dintre care este prevăzut pentru reglarea vectorială a motoarelor asincrone, iar altul – pentru automatizarea lui.

Fig .3.32 Schema de forţă a unui vagon de tramvai ultramodern cu tiristoare GTO şi cu motoare asincrone
În ultimii 20 de ani un salt enorm în utilizarea tramvaielor s-a observat în Germania, mai ales după căderea zidului Berlinului în 1989. În acest interval de timp au fost elaborate câteva generaţii de tramvaie cu un număr mare de vagoane articulate ca la metrou. În rezultat capacitatea de transportarea acestor tramvaie s-a mărit substanţial, apropiindu-se de cea metroului. O altă particularitate a acestor tramvaie o constituie podeaua coborâtă la un nivel de 30 de cm de la pământ. O astfel de podea are ca scop uşurarea urcării şi a coborârii pentru persoane de vârstă înaintată sau cu abilităţi de sănătate.
Prima generaţie modernă de tramvaie cu 3 sau 4 secţii articulate GT6N şi GT8N a apărut în 1990. În notarea aceasta GT înseamnă tramvai articulat, cifra 6 sau 8 – numărul de perechi roţi, iar N- calea ferată normală de 1435 mm, deoarece mai sunt şi căi înguste de 1000 mm. Puţin mai târziu au fost elaborate tramvaie cu secţii de comandă din ambele capete, ca la trenuri şi metrou, care au fost notate GT6N-ZR sau GT9N-ZR (fig.3.33)

Fig.3.33 Tramvai german GT6N cu 3 secţii articulate şi cu 6 osii motoare
Lungimea totală a acestor modificaţii constituie 26m şi 36m, iar numărul de scaune – 46 şi 85. Fiecare boghiu (cărucior) are motorul său de 100 kW, ca urmare puterea totală este de 3x100 kW = 300 kW sau 4x100 kW = 400 kW la o tensiune de 600 V. Pentru o funcţionare mai optimă la cotituri roţile fiecărui boghiu nu se fixează rigid pe o osie comună, ci au posibilitatea de a se roti în jurul axei lor, adică nu au o bază constantă.
O astfel de construcţia are însă unele dezavantaje : - influenţa reciprocă a secţiilor la intrarea în cotitură ;- oscilaţiile transversale se transmit căii de rulare, condiţionând o uzură mai intensivă a acestea. În generaţia următoare aceste dezavantaje au fost înlăturate, fixând rigid roţile pe o osie comună şi utilizând nişte secţii fără cărucior de sprijin (suspendate), care se ţin de secţiile adiacente (vecine) cu roţi Ca urmare, secţiile cu roţi alternează consecutiv cu secţiile fără roţi, ceea ce permite o creştere a numărului total de secţii (module) de la 3 la 7. O astfel de concepţie de cuplare a secţiilor

menţionate a primit denumirea de cuplare combinată (COMBINO), care măreşte lungimea tramvaiului până la 42 m, iar numărul de scaune pentru pasageri - până la 255 (fig.3.34). O garnitură de 5-7 secţii seamănă deja cu o garnitură de metrou sau cu un şarpe . Cel mai lung tramvai din lume este considerat cel din Strasburg cu cabine de comandă la ambele capete (fig.3.35)
Fig.3.34 Schema de cuplare COMBINO a tramvaiului din Dusseldorf

Fig.3.35 Tramvaie articulate multisecţionale din Potsdam, Augsburg şi Strasburg
Evident, că preţul unei astfel de garnituri de tramvai este ridicat. De exemplu, un tramvai cu 5 secţii articulate şi 100 de scaune pentru călători costă 3 mln de Euro.
În unele oraşe din Germania aceste tramvaie articulate sunt prevăzute cu linii speciale subterane în centrul oraşului (ca la metrou), ceea ce permite o creştere a vitezei şi siguranţei de deplasare, precum şi o eliberare a traficului stradal. Aceste linii însă nu sunt atât de adânci ca liniile de metrou, iar la periferia oraşului ies deja

la suprafaţă deschisă. Astfel de linii subterane de tramvai au primit denumirea de STADTBAN (fig.3.36). Secţiile vagoanelor în acest caz sunt prevăzute cu uşi de ambele părţi laterale, care se deschid separat la o deplasare în sensul respectiv.
Fig.3.36 Staţia de tramvai subteran de tipul STADTBAN în oraşul Bohum
Modificaţiile ultimei generaţii ultramoderne a tramvaielor germane sunt numite 2000 şi 2005 (după anul respectiv de implementare) Ele prevăd deja o deplasare liberă a pasagerilor între secţii. Aceste modificaţii au o lungime de 26 m şi 48 m, un număr de locuri 63 şi 126 respectiv şi o acţionare electrică cu 4x100 kW sau 8x100 kW la o tensiune de 600V.
Fig.3.37 Generaţia ultramodernă a tramvaielor articulate germane 2005

O altă modificaţie ultramodernă este numită TRAM – TRAIN , capabilă să se deplaseze în centrul oraşului ca tramvai , iar în zona suburbană – ca ramă de tren (fig.3.38).
Fig.3.38 Modificaţia germană combinată Tramvai - Tren suburban
O variantă originală de tramvai a fost elaborată în oraşul Nancy din Franţa. Acest tramvai este prevăzut cu] roţi pneumatice ca la troleibuz, ceea ce condiţionează un zgomot mult mai scăzut. În plus are o singură şină pe calea de rulare, însă poate să se depărteze de ea, ca un troleibuz obişnuit (fig.3.39).
Fig,3,39 Tramvaiul cu roţi pneumatice şi cu o singură şină din Nancy –Franţa

3.7.2 Particularităţi ale metrourilor moderne
Tramvaiul multisecţional reprezintă o concurenţă serioasă pentru metrou doar în Germania. În celelalte ţări însă nici un alt mijloc nu poate asigura o capacitate de transportare a călătorilor atât de mare ca metroul. De aceea în oraşele mari metroul constituie cel mai productiv şi mai popular mijloc de transport, cu toate că el necesită cheltuieli substanţiale în exploatare, mai ales pentru energie electrică. Aceasta din urmă depinde însă de adâncimea metroului şi de eficacitatea sistemelor de acţionare electrică ale vagoanelor de metrou şi ale celorlalte instalaţii şi mecanisme auxiliare – escalatoare, ventilatoare şi altele.
O ramă de metrou este alcătuită, de obicei, din 4-7 vagoane – motoare de 2 tipuri : cu cabină de comandă – la capete şi fără cabină de comandă – intermediere.Fiecare vagon este înzestrat cu 4 motoare de tracţiune de o putere mai mare ca la tramvai, deoarece metroul are de ridicat deseori pante relativ mari şi trebuie să asigure acceleraţii cu valori peste 1,2-1,3 m/s2 , necătând la momentele mari de inerţie. Aceste momente impun, la rândul lor, necesitatea realizării frânării recuperative.
În ţările occidentale în momentul de faţă vagoanele de metrou sunt acţionate de motoare asincrone reglabile în frecvenţă, iar în ţările est europene introducerea lor este numai într-o fază începătoare, în exploatare aflându-se o mare parte de vagoane cu motoare de curent continuu, reglate cu choppere. În Moscova, de exemplu, puterea motoarelor de curent continuu este de 110kW la vagoane de o lungime de 19m şi o capacitate de 44 / 330 de călători. Din motive de siguranţă frânarea lor nu este recuperativă, ci dinamico – reostatică, însoţită de pierderile corespunzătoare.
Vagoanele moderne „Русич” din Moscova sunt echipate deja cu 4 motoare asincrone de 160kW, alimentate de la convertoare de frecvenţă, deoarece lungimea şi capacitatea lor este mai mare – 27m şi 54/372 de călători. Aspectul exterior al unei rame de metro cu vagoane „Русич” este arătat în figura 3.40. Astfel de rame sunt utilizate şi la metrul din Sofia (Bulgaria).
Una din problemele metrului din Moscova şi din alte oraşe din spaţiul post sovietic este zgomotul puternic al roţilor metalice în timpul mersului şi scârţâitul puternic al frânelor vagoanelor în timpul frânării lor, mai ales al frânelor mecanice înainte de oprire. Acest zgomot şi scârţâit se simte puternic şi din cauza ecoului, care apare într-un spaţiu închis al tunelurilor şi staţiilor subterane. La liniile şi staţiile în aer liber de la periferia oraşului acelaşi zgomot pare mult mai slab, deoarece în acest caz lipseşte efectul amplificator al ecoului.
Metroul din Paris a rezolvat problema zgomotului, înlocuind roţile metalice ale vagoanelor cu roţi pneumatice. Acestea din urmă mai rezolvă concomitent încă o problemă - măresc aderenţa dintre calea ferată şi roţi, ceea ce conduce la o creştere a forţei de tracţiune şi a vitezei vagoanelor.

Fig.3.40 Ramă modernă de metrou „Русич” din Moscova şi Sofia



![2366-1 [1 aa] [2-3 NPO CAP CAP IV-±- 28, 1,500 NPO CAP ... · 2366-1 [1 aa] [2-3 NPO CAP CAP IV-±- 28, 1,500 NPO CAP rcAP V R (. net/ support/persona l/ seminar 3) CAP Child Assault](https://img.dokumen.tips/doc/110x75/5e15b372d0c35936e63a1f08/2366-1-1-aa-2-3-npo-cap-cap-iv-28-1500-npo-cap-2366-1-1-aa-2-3-npo.jpg)

























