Embed Size (px)
Citation preview

UNIVERZITET U BIHAĆU
TEHNIČKI FAKULTET
Elektrotehnički odsjek
Smjer : Informatika
AUTOMATSKO UPRAVLJANJE I
Seminarski rad
Tema: Sistemi upravljanja u vremenskom području
Student: Mirela Sarajlija Prof.Dr. Petar Marić
Broj indeksa: 589-et Mr.Zijad Mustedanagić Bihać, 2014. godina

Sistemi upravljanja u vremenskom području
Control systems in the time domain
Ključne riječi: prijenosna funkcija, sistem upravljanja, vremensko područje, impuls, pobudna funkcija, nule, polovi, signal, odziv linearnih elemenata, faktor prigušenja, diferencijalna jednačina.
SAŽETAK:
U ovom radu je prikazan sistem upravljanja u vremenskom području. Analiza u vremenskom području najčešće podrazumijeva riješavanje diferencijalnih jednadžbi koje opisuje sistem, ili promatranje odziva sistema na narinute standardne pobudne funkcije na njegovom ulazu. Od posebnog interesa za analizu linearnih kontinualnih elemenata / sistema su njihovi odzivi na ulaze tipičnih funkcija vremena (Dirakova), Hevisajdova (odskočna).
Keywords: Transfer function, Control systems, Time domain, Impulse, Excitation function, Zeros, Signal, Response of linear elements, Damping factor, Differential equation.
ABSTRACT:
This work presents a management system in the time domain. The analysis in the time domain usually involves solving differential equations describing the system, or watching the response of the system to the applied standard excitation function at its entrance. Of particular interest for the analysis of linear continuous elements / systems are their responses to the inputs of the typical function of time (Dirak), Hevisajdova (spring).
1

Sadržaj
Sistemi upravljanja u vremenskom području........................................................................1
SAŽETAK..................................................................................................................................1
ABSTRACT...............................................................................................................................1
1. UVOD.....................................................................................................................................3
2. STANDARDNE POBUDNE FUNKCIJE...........................................................................4
2.1 Odskočna funkcija..........................................................................................................4
2.2 Nagibna funkcija.............................................................................................................5
2.3 Parabolna funkcija..........................................................................................................6
2.4 Impulsna funkcija...........................................................................................................6
3. IMPULSNI I ODSKOČNI ODZIV.....................................................................................7
3.1 Uticaj realnih polova.......................................................................................................8
3.2 Uticaj konjugovano kompleksnih polova......................................................................9
3.3 Uticaj nula........................................................................................................................9
4. KONTINUALNI SISTEMI U PRELAZNOM REŽIMU................................................10
4.1 Karakteristični parametri iz vremenskog domena....................................................10
4.2 Karakteristični parametri iz kompleksnog domena..................................................12
5. ZAKLJUČAK......................................................................................................................17
6. LITERATURA....................................................................................................................18
2

1. UVOD
Dinamički sistemi analizom se razvrstavaju u neke prepoznatljive vrste koje su slične po ponašanju i nekim osobinama. Na taj način sistemski se može pristupiti i njihovom vođenju. Analiza dinamičkih sistema kao funkcije nezavisne varijable vremena t najbliža je čovjekovom poimanju događaja. Analiza u vremenskom području najčešće podrazumijeva riješavanje diferencijalnih jednadžbi koje opisuje sistem, ili promatranje odziva sistema na narinute standardne pobudne funkcije na njegovom ulazu. Do eksplicitnog rješenja diferencijalnih jednadžbi koje opisuju dinamički sistem može se doći numeričkim metodama, te egzaktnim analitičkim metodama, što je obično teško, a ponekad i nemoguće. Ipak, uvid u analitičku metodu rješavanja diferencijalne jednadžbe približava apstraktan matematički svijet stvarnim zadacima upravljanja dinamičkim sistemima u tehnici. Rješenje homogene diferencijalne jednadžbe predstavlja vlastito (slobodno) gibanjesistema, dakle vladanje koje je ovisno samo o početnim uvjetima. Položaji polova Sk u s-ravnini u cijelosti karakteriziraju vlastito vladanje sistema opisanog homogenom diferencijalnom jednadžbom. Prijenosne funkcije i prijenosne matrice prikazuju izlazno-ulazne odnose sustava u algebarskom obliku. O položaju polova i nula prijenosne funkcije (matrice) u kompleksnoj s-ravnini ovisi vladanje sistema.
3

2. STANDARDNE POBUDNE FUNKCIJE
Za potrebe analize sistema važno je imati osnovicu za usporedbu različitih sistema. Jedan vrlo prihvaćen način usporedbe je promatranje odziva dinamičkih sustava na ulazne pobude, koje su standardne. Standardne pobudne funkcije su odskočna funkcija, nagibna funkcija, parabolna funkcija i impulsna funkcija. Iako su standardne pobudne funkcije nekontinuirane u ishodištu, pa stoga nisu analitičke funkcije, ipak se s njima formalno izvode sve matematičke operacije kao i s analitičkim funkcijama. Još se i nazivaju singularne funkcije (singularity functions), a povezane su jedna sa drugom uzastopnim derivacijama ili integracijama. Na primjer derivacija parabolne funkcije je nagibna, derivacija nagibne je odskočna, a njena pak derivacija je impulsna. Kao standardne pobudne funkcije u širem smislu, općenito se može navesti red potencija, koji se koristi ponekad za analitički izračun nekih odziva, te sinusna funkcija koja se kao pobuda koristi za analizu u frekvencijskom području. Još postoji niz drugih funkcija koje se mogu koristiti kao pobude, ali su prisutnije u drugim područjima, poput npr. teorije signala, pa se ovdje posebno ne spominju.
2.1 Odskočna funkcija
Odskočna funkcija (step function) ili jedinični odskok (unit step function) standardna je pobudna funkcija u vremenskom području, a prikazana je na slici 5.1. Funkcija se najčešće
označava sa u(t), a prema O. Heavisideu koji ju je često koristio, naziva se još i Heavisideova funkcija. Vrijednost odskočne funkcije se u trenutku skokovito mijenja sa 0 na 1:
Slika 2.1. Odskočna funkcija
u(t)=f (t )={0 ,∧t<01 ,∧t ≥ 0
Laplaceova transformacija odskočne funkcije odgovara transformaciji integracije:
L {u( t)} = 1s
U(s)
Laplaceov transformat odskočne funkcije koristi se u analitičkim izračunima odziva u području kompleksne varijable s. Odziv sistema na pobudu u obliku jedinične odskočne funkcije zove se prijelazna funkcija, a često se označava sa h(t). Odskočna funkcija bi trebala
4

dostići jediničnu vrijednost u vremenu barem pet puta kraćem od vremenske konstante ispitivanog sistema.
2.2 Nagibna funkcija
Nagibna funkcija (ramp function) predstavlja umnožak varijable vremena t i jedinične odskočne funkcije u(t) može se nazvati i jediničnim nagibom: t u(t)
Slika 2.2. Nagibna funkcija
f ( t )={0 ,∧t<0t ,∧t ≥ 0
Laplaceova transformacija nagibne funkcije iznosi:
L { f (t)} = 1
s2 F(s)
Iz Laplaceove transformacije, ali i promatrajući funkcije, uočava se da je jedinična nagibna funkcija dobivena integriranjem jedinične odskočne funkcije, odnosno odskočna funkcija je derivacija nagibne.
2.3 Parabolna funkcija
Parabolna funkcija, ili jedinična parabola, dana je umnoškom nagibne funkcije i vremenske varijable: t2u(t).
Slika 2.3. Parabolna funkcija
5

f ( x )={0 ,∧t <0t 2 ,∧t ≥ 0
Laplaceova transformacija parabolne funkcije iznosi:
L { f (t)} = 1
s3 F(s)
Jedinična parabolna funkcija dobiva se integriranjem jedinične nagibne funkcije, odnosno jedinična nagibna funkcija dobiva se deriviranjem jedinične parabolne funkcije.
2.4 Impulsna funkcija
Derivacijom odskočne funkcije dobiva se impulsna funkcija (impulse function), koja prema tome ima vrijednost 0 u svakom trenutku, osim u trenutku t = 0, kada je njena amplituda beskonačna. Impulsna funkcija ili jedinični impuls još se naziva Diracova delta funkcija, prema P. Diracu koji je uveo u teorijsku fiziku, a označava se sa δ(t).
Slika 2.4. Impulsna funkcija
f(t)=δ (t)≡{ 0 , t<0∞ ,t=00 , t>0
6

3. IMPULSNI I ODSKOČNI ODZIV
Od posebnog interesa za analizu linearnih kontinualnih elemenata / sistema su njihovi odzivi na ulaze tipičnih funkcija vremena (Dirakova), Hevisajdova (odskočna).
Laplasova transformacija Dirakovog impulsa je jednaka jedinici, pa je otuda odziv sistema sa funkcijom prijenosa G(s) i pri nultim početnim uslovima jednostavno
Y(s)=G(s)U(s)=G(s)
Funkcija prijenosa kontinualnog sistema je jednaka Laplasovoj transformaciji njegovog impulsnog odziva pri nultnim početnim uslovima.Pošto je Dirakova funkcija idealizacija nekog impulsa češće se posmatraju odzivi na ulaze odskočne funkcije vremena.Laplasova transformacija jedinične odskočne funkcije je U(s)=1/s.Otuda je kompleksni lik odskočnog odziva dat sa
Y(s)=G(s)1s
Koristeći teorem o graničnoj vrijednosti, za vrijednost odskočnog odziva u stacionarnom stanju (ako postoji) pri jediničnom odskočnom ulazu dobijamo
limt → ∞
y (t)=y∞=lims → 0
sG (s) 1s
=G(0)
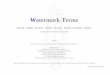
Ako je sistem stabilan tada će prijelazne komponente odskočnog odziva eksponcijalno težiti nuli i postojaće njegova konačna vrijednost u stacionarnom stanju.da bi se definisali relevantni parametri koji karakterišu dinamiku nekog elementa / sistema posmatra se odskočni odziv kao na slici:
7

Slika 3.1. Analiza odskočnog odziva
Vrijeme porasta tr je ono vrijeme koje protekne dok odskočni odziv prvi put dostigne vrijednost kr y∞, gdje krvarira između 0.9 i 1.
Preskok (eng. overshoot) Mp je maksimalna trenutna vrijednost za koju odskočni odziv prelazi svoju končnu vrijednost.
Položaj (eng. undershoot) Mu je maksimalna (apsolutna) vrijednost za koju seodskočni odziv mijenja u suprotnu stranu od y(∞).
Vrijeme smirenja ts je vrijeme potrebno da odskočni odziv uđe i ostane u granicama ± δ oko svoje konačne vrijednnosti.Ova definicija δ se često izražava postocima od konačne vrijednosti (naprimjer, 1% do 5%).
3.1 Uticaj realnih polova
Svaka racionalna funkcija prijenosa se može razviti u parcijalne razlomke od kojih sbaki član odgovara ili jednostrukim ili višestrukim , realnim ili parovima konjugovano kopleksnih polova.U tom smislu je korisno razmotriti efekte pojedinih polova na prelazne procese.Efekat jednostrukog realnog pola se može sagledati posmatrajući odziv elemenata / sistema sa funkcijom prijenosa
G1(s) = K
Ts+1
gdje su K, T realne i pozitivne konstante.
Odziv elemenata da ulaz oblika jedinične odskočne funkcije vremena je dat sa
y(t) = l-1 { Ks(Ts+1) } = l-1 {K
s− KT
Ts+1 } = K(1-e−tT ), t≥0
Vrijednost odskočnog odziva u stacionarnom stanju je:
y∞ = G(0) = lims → 0
KTs+1
= K , tako da K predstavlja odnos ulaza i izlaza u stacionarnom
stanju.T je vremenska kostanta elemenata i određuje brzinu njegovog odziva.Odziv se može skicirati direktno na osnovu poznavanja funkcije prijenosa : K i T.
Svi elementi prvog reda imaju jedan realan pol i aperiodski odskočni odziv, pa se obično nazivaju aperiodskim.Elemenat sa većom vremenskom konstantom T ima sporiju reakciju, što odgovara pomjeranju realnog pola (s = l/T) prema imaginarnoj osi.
8

Navedeni parametri funkcije prijenos se mogu grafički odrediti za poznat odskočni odziv.Kako je ovdje od posebnog interesa dinamika elemenata, uglavnom će biti posmatrani elementi sa jediničnim prijenosom odnosom u stacionarnom stanju, odnosno G(0)=1.
9

3.2 Uticaj konjugovano kompleksnih polova
Uticaj konjugovano kopmleksnih polova se može sagledati na osnovu odziva sistema sa funkcijom prijenosa koja se obično predstavlja u obliku.Mali faktor prigušenja će rezultovati malim vremenom porasta ali i velikom preskokom.Brzina išćezavanja prelaznog procesa i vrijeme smirenja su određena-Svaki pol u odzivu na implusu generiše prelaznu komponentu koja se naziva prirodnim modom.Ovi modovi su prisutni u odzivu sistema na bilo kojji oblik u ulaza.Modovi će imatiaperiodski karakter ako su generisani realnim polovima, a modovi koji odgovaraju kopleksnim polovima će imati oscilatoran karakter.brzim polovima se nazivaju oni koji su sa polažajem mnogo dalje na lijevo od ostalih polova s-ravni.Odnosno prelazne komponente u odzivu koje su posljedica prisustva ovih polova mnogo brže iščezavaju nego za druge polove.
3.3 Uticaj nula
Kao što se na osnovu prethodnog može zaključiti polovi određuju pojedine modove (oblik komponenti odziva) nezavisno jednih od drugih.Nule funkcije prijenosa predstavljaju neku interakciju više polova na odziv sistema.Polovi određuju modove sistema, alokacija nula određuje proporciju s kojom se taj mod kombinuje u formiranju izlaza.Razlikuju se ˝brze˝ i ˝spore˝ nule.Termin spore se odnosi na sve nule koje su bliže imaginarnoj osi s-ravni od dominantnih polova kao naprimjer:
G(s) = 2(s+c )
c ( s+1 )(s+2)
Slika 3.2. Odskočni odziv sistema sa dva pola
Ograničeno je daa će uticaj pola -1 na odziv ovog sistema biti zanemarljiv ako je nula –s bliska po vrijednosti -1, i situacija je analogna sa drugim polom u -2.U svim slučajevima kada je nula bliska nekom od polova elementa oni čine dipol i njihov uticaj na dinamiku elemenata se može zanemariti.
10

4. KONTINUALNI SISTEMI U PRELAZNOM REŽIMU
Postoji veći broj parametara koji karakterišu ponašanje sistema u prijelaznom režimu. Ovi parametri pripadaju različitim prostorima u kojima se sistemi mogu analizirati (vremenski, frekvencijski ili kompleksni).
4.1 Karakteristični parametri iz vremenskog domena
Kada se karakteriše prelazni režim sistema, uobičajeno je da se posmatra jedinčni odskočni odziv relaksiranog sistema, dakle sistema čiji su svi početni uslovi bili jednaki nuli. Jedan takav, karakterističan odskočni odziv prikazan je na slici:
Slika 4.1. Tipičan odskočni odziv relaksiranog sistema
Pod pretpostavkom da smo sa y(t) označili jedinični odskočni odziv sistema, moguće je uočiti neke karakteristične tačke na dijagramu prikazanom na slici 4.1. Prvo, sa y(∞) je označena vrijednost odziva sistema u stacionarnom stanju. Dalje, sa tn je označen vremenski trenutak u kome odskočni odziv ima svoj maksimum a sa je označen vrednost tog maksimuma:
Na osnovu ovog parametra moguće je definisati prvu važnu karakteristiku prelaznog režima u sistemu koja se naziva preskok. Preskok se obeležava sa Π, obično se izražava u procentima a definiše na sledeći način:
11

Vrijednost preskoka za stabilne sisteme može uzeti vrijednosti u intervalu (0,100)%, pri čemu već preskok od 100% indicira da je sistem na granici stabilnosti, o čemu će biti reči kasnije. Također, veći preskok ima za posljedicu veću brzinu sistema, što je dobra osobina, tako da se prilikom projektovanja sistema upravljanja mora tražiti kompromis između ova oprečna zahtjeva. Druga važna karakteristika prijelaznog režima, a koja se uočava na osnovu vremenskog odziva sistema, jeste vrijeme kašnjenja. Vrijeme kašnjenja sistema se obično obilježava sa t0.5 ili Tk , u literaturi na našem jeziku, i predstavlja trenutak kada odskočni odziv sistema dostigne 50% svoje vrijednosti u stacionarnom stanju:
Sljedeća važna karakteristika sistema jeste vrijeme uspona sistema koje se obično definiše kao vrijeme koje protekne od trenutka kad odziv dostigne 10% do trenutka kada dostigne 90% svoje vrednosti u stacionarnom stanju. Obično se obilježava sa Tr u literaturi na engleskom ili Tu u literaturi na našem jeziku i formalno se definiše na sledeći način:
Vrijeme kašnjenja i vrijeme uspona su dva parametra koja su direktno vezana za brzinu odziva sistema i obrnuto su proporcionalna preskoku. Što je preskok veći to su ove dvije vremenske konstante manje i obrnuto.
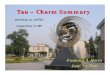
Slika 4.2. : Odzivi sistema sa različitim preskocima i vremenima uspona
Preciznim izračunavanjima trenutaka i za ove sisteme dobija se da je vrijeme uspona za sistem a a za sistem b 0.1 0.5, 0.9 t ,t t Πt T s ua =1,66 Tub =1.2 s, da su vremena kašnjenja T s i ka =1.29 T s kb =1.13 , dok su odgovarajući preskoci Π =16.3% i a Πb = 52.6%. Dobijeni rezultati zaista potvrđuju da je za sisteme sa većim preskokom karakterističan brži odziv,
12

dakle kraće su vremenske konstante .uspona i kašnjenja. Vrlo često se koristi jedna inženjerska aproksimacija koja kaže da je proizvod vremena uspona i učestanosti propusnog opsega sistema konstantna veličina između 0.3 i 0.4: Tu f0 ≈ 0.3÷0.4
4.2 Karakteristični parametri iz kompleksnog domena
Treći skup parametara koji opisuje ponašanje sistema u prelaznom režimu se mogu formirati na osnovu analize sistema u kompleksnom domenu. Ako pođemo od pretpostavke da je
sistem opisan funkcijom prenosa, pri čemu je funkcija prenosa realna racionalna funkcija:
tada se ova funkcija prijenosa na jednoznačan način može opisati pomoću svog pojačanja K i položaja nula , 1,..., i µ i = m i polova , 1,..., i λ i = n. Uobičajeno je da se ovaj raspored nula i polova prikaže u kompleksnoj s ravni, pri čemu se za poziciju polova koristi marker '×' a za poziciju nula marker 'o'. Primer takvog prikaza sistema sa pet polova i dve nule je dat na slici:
Slika 4.3. Prikaz pozicije polova i nula sistema u kompleksnoj ravni
Pri tome ne treba zaboraviti da se za realne sisteme, polovi i nule ili mogu pojavljivati kao realne konstante ili se moraju pojaviti u konjugovano kompleksnim parovima. Takođe, trenutno ćemo analizirati samo stabilne sisteme, dakle podrazumeva se da sistem nema polova u desnoj poluravni s ravni. Pojam koji je vrlo važan i koji ćemo sada definisati jeste pojam dominantnih polova sistema. Naime, sistemi često imaju veliki broj polova, mogu biti visokog reda, međutim uticaj mnogih od njih je neznatan ili beznačajan i može se zanemariti, dok je uticaj neki drugih polova vrlo značajan pa se takvi polovi nazivaju dominantnim. Da bismo ilustrovali ovo tvrđenje možemo izvesti sledeću jednostavnu simulaciju. Pretpostavimo da posmatramo sistem petog reda opisan sljedećom funkcijom prenosa:
13

Dalje, posmatrajmo sistem funkcije prenosa G2 (s) koji će od pet polova prethodnog sistema zadržati samo konjugovano kompleksne polove koji su najbliži imaginarnoj osi, nule i odgovarajuće pojačanje (takvo da statičko pojačanje u oba sistema bude jednako, odnosno G
1( ) =G2( ):
Posmatrajmo odzive ova dva sistema na jediničnu odskočnu pobudu.
Slika 4.4. Odziv sistema petog reda i odziv redukovanog sistema drugog reda
Punom linijom na slici 4.4 je prikazan odskočni odziv sistema petog reda, dok je isprekidanom linijom prikazan odziv sistema funkcije prijenosa G2 (s). Sa slike se vidi da je razlika između ova dva odziva neznatna, i isti bi se zaključak mogao izvesti da je bilo kakav signal doveden kao pobuda za ova dva sistema. Pri tome, redukcija reda sistema sa pet na dva nije izvršena slučajno. Dva konjugovano kompleksna pola koja se nalaze najbliže imaginarnoj osi (u lijevoj poluravni s ravni) su dobar reprezent ponašanja sistema i za sistem G1 (s) oni predstavljaju dominantne konjugovano kompleksne polove. Ovaj bi se zaključak mogao i generalizovati na sljedeći način:
Za stabilne sisteme pod parom dominantnih konjugovano kompleksnih polova se smatraju konjugovano kompleksni polovi koji su najbliži imaginarnojosi, odnosno to su polovi čiji je realni dio najveći.
14

Ovaj zaključak ima nekoliko izuzetaka i ovi se izuzeci mogu kategorisati na sljedeći način:
1. Ako sistem ima isključivo realne polove, takav sistem naravno nema par dominantnih konjugovano kompleksnih polova, već se realni pol najbliži imaginarnoj osi smatra dominantnim realnim polom.
2. Ako sistem ima par konjugovano kompleksnih polova, ali postoji realan pol koji je bliži imaginarnoj osi, koji će od njih biti proglašen dominantnim zavisi od prirode sistema i njegove namene. Ukoliko se od sistema očekuje da prevashodno bude brz uz izvesne dozvoljive preskoke u odzivu, realan pol se može smatrati dominantnim. U suprotnom, ukoliko se insistira na malom ili nikakvom preskoku po cenu smanjenja brzine odziva, par konjugovano kompleksnih polova se može smatrati dominantnim parom.
3. Ukoliko sistem ima dva para konjugovano kompleksnih polova koji su približno jednako udaljeni od imaginarne ose, onda se posmatra i njihov imaginarni deo. Ukoliko su imaginarni delovi jednog para konjugovano kompleksnih polova značajno veći od imaginarnih delova drugog para konjugovano kompleksnih polova, tada se oni proglašavaju dominantnim polovima, bez obzira na to koji od njih je bliži imaginarnoj osi.
Sada, pošto smo definisali šta su dominantni konjugovano kompleksni polovi, pretpostavimo da je neki proizvoljni sistem dovoljno dobro aproksimiran svoji dominantnim konjugovano kompleksnim polovima i predstavljen funkcijom prenosa drugog reda:
Uobičajeno je da se polinom u imeniocu predstavi u sljedećoj formi:
pri čemu se parametar ζ naziva faktorom relativnog prigušenja para dominantnih konjugovano kompleksnih polova a parametar ωn neprigušenom prirodnom učestanošću para dominantnih konjugovano kompleksnih polova. Traženjem nula polinoma dobija se položaj dominantnih polova:
15

Slika 4.5. Položaj dominantnih konjugovano kompleksnih polova
Parametri ζ i ωn jednoznačno određuju položaj dominantnih polova. Na slici 4.5 su u s ravni prikazani ovi polovi, i na osnovu slike se lako zaključuje da se dominantni polovi nalaze na kružnici poluprečnika n ω a da je kosinus ugla koji zaklapa poteg od koordinatnog početka do dominantnog pola sa negativnim delom realne ose jednak parametru ζ .Ukoliko se realni dio konjugovano kompleksnih polova n −ζω napiše u formi , dobija se dominantna vremenska konstanta koja je već definisana kao parametar koji definiše brzinu promjena gornje i donje anvelope u odskočnom odzivu sistema:
Dva, od tri navedena parametra: faktor relativnog prigušenja, neprigušena prirodna učestanost i dominantna vremenska konstanta, mogu jednoznačno da odrede položaj dominantnih polova.Na kraju treba reći da i faktor relativnog prigušenja i neprigušena prirodna učestanost mogu uzeti vrednosti iz skupa [0,∞] . Zbog svoje prirode (poluprečnik kruga na kome se nalaze dominantni polovi) nema fizičkog smisla da neprigušena prirodna učestanost bude negativna, a negativna vrednost za faktor relativnog prigušenja bi značila da su polovi u desnoj poluravni desne ravni, odnosno da je sistem nestabilan.
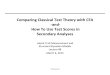
Ukoliko je faktor prigušenja iz intervala [0,1] polovi su konjugovano kompleksni, za vrijednost ζ =1 u pitanju je dvostruki realan pol, dok za ζ >1 sistem ima dva različita realna pola. Na slici 4.10 su prikazane različite pozicije dominantnih polova i pored njihovih pozicija su prikazani odskočni odzivi koje takvi dominantni polovi generišu.
16

Slika 4.6. Različite lokacije dominantnih polova i odskočni odzivi koji oni generišu
Slici 4.6. je potrebno dodati neke komentare koji će objasniti zašto parametri ζ i ωn imaju imena koja imaju. Naime, primetimo da su za slučaj (2) polovi sistema na imaginarnoj osi što odgovara slučaju ζ = 0.
U tom slučaju je odziv sistema prostoperiodičan, dakle neprigušen. Kako se polovi sistema pomeraju u levo (slučajevi (1) i (3)) faktor relativnog prigušenja se povećava od nule ka vrijednosti 1 i odzivi sistema su sve prigušeniji do slučaja kada faktor prigušenja postaje veći od 1. Tada se polovi sistema nalaze na realnoj osi, i odziv postaje aperiodičan. Drugim rečima, faktor ζ zaista predstavlja meru prigušenja sistema. Otuda i nosi ime faktor relativnog prigušenja. Sa druge strane, kada je sistem neprigušen, dakle kada je ζ = 0, polovi sistema su na imaginarnoj osi, i tada je odziv sistema prostoperiodičan sa periodom ponavljanja ωn .
Dakle, ova učestanost predstavlja periodu oscilovanja sistema u slučaju nultog prigušenja i pri tome će se ovakav oblik pojaviti nezavisno od toga kakva je pobuda na ulazu sistema. Dolazimo do zaključka da je ova učestanost sakrivena u sistemu, ona je ugrađena u njega, njemu prirodna, i zato se naziva neprigušena prirodna učestanost.
17

5. ZAKLJUČAK
Na osnovu odrađenog seminarskog rada na temu sistemi upravljanja u vremenskom području
zaključuje se zasebni prikaz svake funkcije na njenom vremenskom području.Karakterišu je
svaka eskulacija, rast ili pad njenog signala.Prijelazna funkcija, težinska funkcija i
konvolucijski integral specijalni su oblici prikaza sistema u vremenskom području.Prikaz
sistema u prostoru stanja prikladan je za teoretsku analizu(analiticka rješenja, optimiranje),
kao i za analizu računarom.Prikazom sistemu u prostoru stanja dobiva se dobar uvid
uunutarnje vladanje sistema. Laplaceova transformacija (L-transformacija) najvažnije je
pomoćno sredstvo za rješavanje linearnih diferencijalnih jednadžbis konstantnim
koeficijentima.L-transformacija predstavlja iznimno važan alat (jezik) u automatskom
upravljanju. Pojačanje sistema opisanog prijenosnom funkcijom G(s) (oznaka: K) predstavlja
ustaljenu vrijednost njegove prijelazne funkcije. Rješenje homogene diferencijalne jednadžbe
predstavlja vlastito (slobodno) gibanjesistema, dakle vladanje koje je ovisno samo o početnim
uvjetima. Položaji polova Sk u s-ravnini u cijelosti karakteriziraju vlastito vladanje sistema
opisanog homogenom diferencijalnom jednadžbom. Prijenosne funkcije i prijenosne matrice
prikazuju izlazno-ulazne odnose sustava u algebarskom obliku. O položaju polova i nula
prijenosne funkcije (matrice) u kompleksnoj s-ravnini ovisi vladanje sistema.Transportno
kašnjenje (mrtvo vrijeme) pojavljuje se u modelima procesa u kojima se transportira masa,
energija ili informacija.Prijenosne funkcije procesa s transportnim kašnjenjem
sutranscendentne. Transcendentne prijenosne funkcije mogu se aproksimirati racionalnim
prijenosnim funkcijama.
18

6. LITERATURA
[1] OSNOVE SISTEMA AUTOMATSKOG UPRAVLJANJA; Dr. Milorad M. Božič, Dr. Petar S. Marić , 2008.
[2] TEORIJA AUTOMATSKOG UPRAVLJANJA 1; Čedomir Milosaljević, 2008.
[3] http://www.sau.ac.me/Brodskaautomatika/Predavanje%204.pdf
[4] http://titan.fsb.hr/~jpetric/Udzbenici/Udzbenik_AUTOMATSKA%20REGULACIJA_Jpet ric.pdf
[5] http://adria.fesb.hr/~gmicic/vj/vjezba_3.pdf
19