Embed Size (px)
Citation preview

TASK 2TASK 2
Controllo passivo mediante Controllo passivo mediante Dissipazione di energiaDissipazione di energia

TASK 2TASK 2
Controllo passivo mediante Controllo passivo mediante Dissipazione di energiaDissipazione di energia
ASPETTI GENERALIASPETTI GENERALI

TECNICHE DI IDENTIFICAZIONE DELLE PROPRIETÀ DI DISSIPAZIONEdi strutture con sistemi di protezione innovativi
Metodi nel dominio del tempo
METODI NEL DOMINIO DELLE FREQUENZE
Oscillazioni ambientali (es. vento, traffico)
Forzante imposta (es. vibrodina)
funzioni di risposta in frequenza (FRF)
2 4 6 8 10 12 14 16 18
-100
0
100
Frequency (Hz)
Pha
se (d
eg)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Am
plitu
de (m
/N)
Frequency [Hz]
2ω
1ω
3ωIn
erta
nce
modu
lus [c
m/KN
/s2]
Phas
e an
gle [°
]
∑ ∑= =
−++−=p
k
q
kkk knnknn
1 1)()()()( uCuyAy
Damping Ratios
( )t
fΔ
=π
λ2ln ( )( )
( )λλξ
lnlnRe
−=
OSC. LIBERE OSC. FORZATE
Modal Frequency

SCOPO
Individuare mediante processo di identificazione lo smorzamento isteretico strutturale
Incremento di smorzamento dovuto a cicli
isteretici dell’acciaio
5
Trave 30x50
cm2
Pilastri 30x30
cm
1
m
3
Pilastri 30x30
cm
m
Trave 30x50
cm
53
3
6
4
0 1 2 3 4 5 6 7 8 9 10
-1
-0.5
0
0.5
1
Forzante
Time (sec)
Fact
or (N
)
FORZANTE

TASK 2TASK 2
Controllo passivo mediante Controllo passivo mediante Dissipazione di energiaDissipazione di energia
PANORAMICA DI ALCUNI DEI SISTEMI CONSIDERATIPANORAMICA DI ALCUNI DEI SISTEMI CONSIDERATI

IMPLICATIONSIMPLICATIONS
• The findings open the grounds for a new conceptual design strategy: insertion of dampers between frames and lateral-resisting elements
(Trombetti and Silvestri, Journal of Earthquake Engineering, 2004)

Modelli Modelli computazionalicomputazionali
UnitUnitàà di Ricercadi Ricerca: : UniversitUniversitàà di Udine (di Udine (respresp. S. . S. SoraceSorace) ) -- Riunione 29.09.2006Riunione 29.09.2006
Sistema a cavi smorzantiSistema a cavi smorzantie relative installazioni strutturali e relative installazioni strutturali
Modello analitico vs Modello computazionale
Edifici
500 500
350
350
350
350
0 50 100 150 200 250 3000
1
2
3
4
Taglio [kN]
Pia
no
Modello SAP2000NL Modello J2d
0 5 10 15 20 25-100
-50
0
50
100
150
200
250
300
350
400
Spostamento [mm]
Forz
a [k
N]
Modello SAP2000NL Modello J2d
0 5 10 15 20 25 30-100
-80
-60
-40
-20
0
20
40
60
80
100
Tempo [s]
S
post
amen
to [m
m]
Modello SAP2000NL Modello J2d
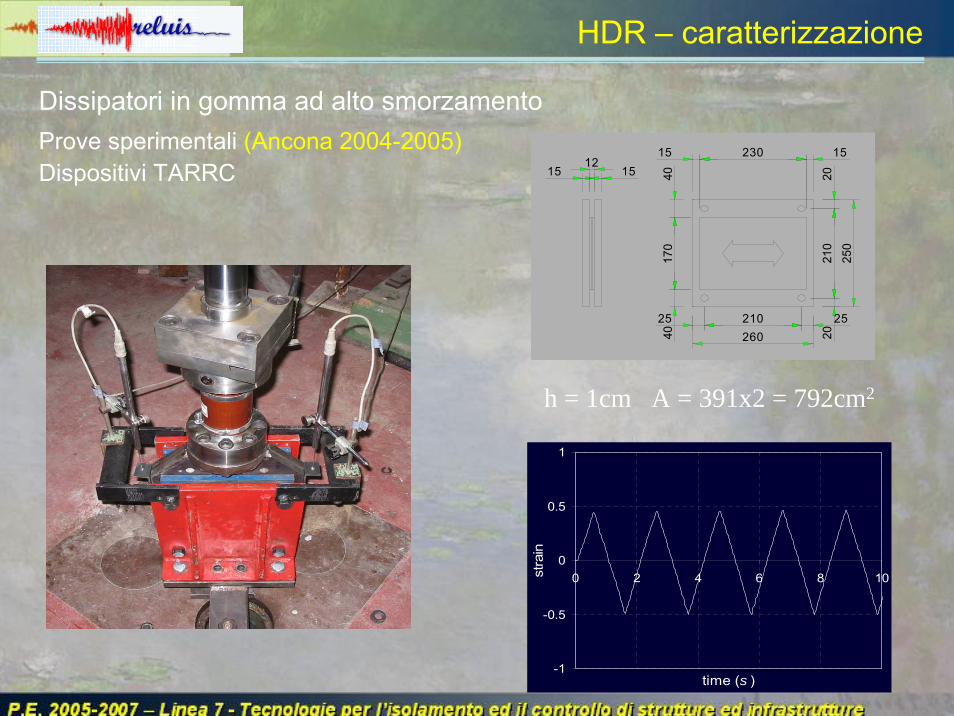
Dissipatori in gomma ad alto smorzamentoProve sperimentali (Ancona 2004-2005)Dispositivi TARRC
210
2020
250
25 210 25260
170
4040
15 230 151515
12
HDR – caratterizzazione
h = 1cm A = 391x2 = 792cm2
-1
-0.5
0
0.5
1
0 2 4 6 8 10
time (s )
stra
in

Sistema Dissipativo -Ricentrante
Ciclo Dissipativo - Ricentrante
Spostamento
Forza Orizzontale
Spostamento
Spostamento
Forza Orizzontale
Forza Orizzontale
Rocking Damper
Forza Oriz. Forza Oriz.Peso
Elem. Dissipativo
Maschio Maschio
Sistemi ricentranti dissipativi per strutture murarie

Diametro interno 2540 mmDiametro esterno 2900 mm
Spessore muratura 180 mm
Numero dei maschi 8Larghezza media
maschi 534 mm (22.5°)Larghezza media
aperture 534 mm (22.5°)
Altezza maschi 1080 mmAltezza Base 360 mm Altezza testa 480 mmPeso blocco 130 KN
Tamburo - Chiesa S.Niccolò - CataniaSistema Dissipativo-Ricentrante DIS-CAM
Intervento in corso d’opera
Caratteristiche Modello Sperimentalesc: 1:6 presso ENEA (Prof. Zincone)
• Zona 2 - Terreno B
Sistemi ricentranti dissipativi per strutture murarie

RELUIS MOCK-UP -Dispositivi SMA
Dispositivi viscosi (Dispositivi viscosi (siliconicisiliconici))
Controventi ricentranti-dissipativi
1 Hz
-50
-40
-30
-20
-10
0
10
20
30
40
50
-30 -20 -10 0 10 20 30
(mm)
(kN
)
Progetto TREMA –Bagnoli ILVA-IDEM

Modelli Modelli computazionalicomputazionali
UnitUnitàà di Ricercadi Ricerca: : UniversitUniversitàà di Udine (di Udine (respresp. S. . S. SoraceSorace) ) -- Riunione 29.09.2006Riunione 29.09.2006
Sistema dSistema d’’isolamento e dissipazione alla base (BISD) isolamento e dissipazione alla base (BISD) e relative installazioni strutturali e relative installazioni strutturali
Edifici
Solai isolati in edifici a destinazione museale od espositiva
Oggetto di applicazioni simulate di altre tecnologie d’isolamento

TASK 2TASK 2
Controllo passivo mediante Controllo passivo mediante Dissipazione di energiaDissipazione di energia
MODELLAZIONE ANALITICA E NUMERICAMODELLAZIONE ANALITICA E NUMERICA

Modelli analitici e Modelli analitici e computazionalicomputazionali
UnitUnitàà di Ricercadi Ricerca: : UniversitUniversitàà di Udine (di Udine (respresp. S. . S. SoraceSorace) ) -- Riunione 29.09.2006Riunione 29.09.2006
DispositiviDispositivi
Modello analitico [Peckan et al. 1995, Sorace e Terenzi 2001a]
Modello computazionale [Sorace e Terenzi 2001b]
Struttura
k1, k2
k∞δ1
c, α
δ (cedimento)
k∞ δ1
-15 -10 -5 0 5 10 15-40
-30
-20
-10
0
10
20
30
40
Displacement [mm]
Forc
e [k
N]
Test d185λ = 1
Experimental Numerical
1/55
0
1
212e
)(1
)()()()(
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+
⋅−+⋅=
Ftxk
txkktxktF ))(sign()()( αd tvtvctF ××=

Modelli Modelli computazionalicomputazionali
UnitUnitàà di Ricercadi Ricerca: : UniversitUniversitàà di Udine (di Udine (respresp. S. . S. SoraceSorace) ) -- Riunione 29.09.2006Riunione 29.09.2006
Sistema a controventi dissipativiSistema a controventi dissipativie relative installazioni strutturali e relative installazioni strutturali
Modello
Edifici
particolare A
A
A
sezione trave di contrastoHE 140B
piastra sp. 20 mm
sezione travi di controventaturaUPN 180
bullonatura 8.8 φ20
bullonatura 8.8 φ18
calastrelli di unione
bullonatura 8.8 φ20ancoranti mod. HILTI HSA-M16X120
dissipatore Jarret mod. BC1GN
pattini guida con interposta striscia di Teflon
contrasto e supportodissipatore
piastra di supporto/allestimento F0 Gap
Impalcato
Dissipatore [c, α]
Hook
Molla [k1, k2, R ]
Hook
Gap
Molla [k1, k2, R ]
Dissipatore [c, α]

Modelli Modelli computazionalicomputazionali
UnitUnitàà di Ricercadi Ricerca: : UniversitUniversitàà di Udine (di Udine (respresp. S. . S. SoraceSorace) ) -- Riunione 29.09.2006Riunione 29.09.2006
Sistema a cavi smorzantiSistema a cavi smorzantie relative installazioni strutturali e relative installazioni strutturali
Modello analitico vs Modello computazionale
Edifici
500 500
350
350
350
350
0 50 100 150 200 250 3000
1
2
3
4
Taglio [kN]
Pia
no
Modello SAP2000NL Modello J2d
0 5 10 15 20 25-100
-50
0
50
100
150
200
250
300
350
400
Spostamento [mm]
Forz
a [k
N]
Modello SAP2000NL Modello J2d
0 5 10 15 20 25 30-100
-80
-60
-40
-20
0
20
40
60
80
100
Tempo [s]
S
post
amen
to [m
m]
Modello SAP2000NL Modello J2d

rate:0.1s -1
-80
-40
0
40
80
-2 -1 0 1 2
strain
forc
e (k
N)
datamodel
-100
-80
-60
-40
-20
0
20
40
60
80
100
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
strain
forc
e(kN
)
Confronto numerico sperimentalerisposta stabile
HDR – caratterizzazione
Confronto numerico sperimentalerisposta transitoria

HDR – Modello costitutivo
+= ),,( 210 vv γγγττ ),,,( 3 vevm qqγγτ
• Viscoelastico non lineare degradante
variabili interne:γvi = deformazioni inelastiche (3)qj = parametri di danneggiamento (2)
• Risposta totale = risposta limite + risposta transitoria (danno)
Dall’Asta A. and Ragni L. “Experimental tests and analytical model of high damping rubber dissipating devices ” – Engineering Structures – 28 (13) - 2006
+)(γef [ ]+− 11 vvE γγ=0τ [ ]22 vvE γγ −
+− )()1( γα eem fq [ ]33 )1( vvv qE γγ −− &=mτ

CARICO CRITICO DI ISOLATORI ELASTOMERICI ARMATIObiettivo 2:Obiettivo 2: SviluppoSviluppo di di modelli matematicimodelli matematici per per simulare il comportamento sperimentalesimulare il comportamento sperimentale di di isolatori elastomerici armati snelliisolatori elastomerici armati snelli, e di , e di formuleformule per per ll’’instabilitinstabilitàà da inserire nella normativada inserire nella normativa
24)( 2 GAPGAGA
P Ecrit
⋅++−= dovedove
2
2
LEIPE
π=PPcritcrit (GA, EI)=(GA, EI)=
dovedovePPcritcrit(GA, EI, EA)=(GA, EI, EA)=⎟⎠⎞
⎜⎝⎛ +−++
=
222411
2
GALEI
EALEI
Eb
π
λλ2
2
LEI
Eπλ =
((OrdinanzaOrdinanza 3274 del 20/03/03 3274 del 20/03/03 e 3431 del 03/05/05)e 3431 del 03/05/05)
(A.D.(A.D.LanzoLanzo))
(A.(A.RaithelRaithel -- G.G.SerinoSerino))
e
rdincrit t
bSAGV min1 ⋅⋅⋅=VVcritcrit== dove dove GGdindin: modulo di : modulo di taglio dinamicotaglio dinamico
AArr: area : area ridotta efficaceridotta efficace
SS11: : fattorefattore di forma di forma primarioprimario
bbminmin: : diametrodiametro
ttee: : spessore totale degli strati dellspessore totale degli strati dell’’elastomeroelastomero

TASK 2TASK 2
Controllo passivo mediante Controllo passivo mediante Dissipazione di energiaDissipazione di energia
PROCEDURE PROGETTUALIPROCEDURE PROGETTUALI

CRITERI DI PROGETTO SEMPLIFICATIDI EDIFICI CON CONTROVENTI DISSIPATIVI
PROBLEMATICHEProgettazione ex-novoAdeguamento antisismico
OBIETTIVIMessa a punto di procedure progettuali semplificateModellazione e codice di calcolo per l’analisi dinamica in campo non lineareValidazione delle procedure progettuali attraverso indagini numeriche
CAMPO DI INDAGINEStrutture intelaiate in c.a. e in acciaioControventi metallici con dissipatori isteretici e viscoelastici

Cd
Cd
1
2
PROGETTO DEI DISPOSITIVI VISCOSIObiettivo 1:Obiettivo 1: SviluppoSviluppo di di metodologiemetodologie di di progettoprogetto di di dissipatoridissipatori a a comportamento viscosocomportamento viscoso e e viscovisco--elasticoelastico per per edificiedifici e e pontiponti, con , con svilupposviluppo di procedure di di procedure di prova prova ed ed indicazioniindicazioni normativenormative
In funzione della rigidezza relativa controventoIn funzione della rigidezza relativa controvento--telaio a ciascun piano, telaio a ciascun piano, èè possibile possibile individuare un individuare un rangerange di valori ottimali da assegnare al parametro di progetto (coeffdi valori ottimali da assegnare al parametro di progetto (coefficiente iciente di smorzamento) dei dispositivi viscosi. di smorzamento) dei dispositivi viscosi.
Fdp
1p
2
x0
2.5
5
7.5
10
0 0.5 1 1.5β
| ζf,m
ax|
ν = 0.001
ν = 1.5ν = 0.05
ν = 0.1
ν = 0.2ν = 0.5
ν = 1
ν = 5
νopt = 0.2887
RiferimentiRiferimenti: G. : G. SerinoSerino & M. & M. SpizzuocoSpizzuoco. . About the design of passive and semiAbout the design of passive and semi--active MR dampers for seismic protection active MR dampers for seismic protection of buildingsof buildings. 12. 12thth ECEE. ECEE. ElsevierElsevier, Oxford, UK, 2002., Oxford, UK, 2002.

STEP 2:Identification of the “equivalent” non-linear damping coefficients
max, 1
max, 1
reference point P:0.80.8
P
P
v vF F
α
α
=
=
≅ ⋅
≅ ⋅
In order to identify the characteristics of the non-linear damper system which is “equivalent” (in terms of providing same actions under same inputs) to the linear one, we propose to identify a reference point P in the force-velocity diagram.
The reference point P:• is a design point through which the non-linear constitutive law must pass• should be chosen carefully so that the linear and the non-linear constitutive
laws are “close” to each other within the “working” range of velocities.
“Working” range of velocities meaning the velocities developed between the two ends of the dampers under the design earthquake inputs.
0.3α =
lead to conservative results

Procedura di progetto
RisultatiSpettro spostamenti lineare (ξm,Td) umax
Valutazione affidabilità del metodo (γmax= γd)
Valutazione affidabilità verifica semplificata γd (γmax1,γmax2)
d
uhγmax=
MGhT
GKhA
mm
20==
∈
InputM, HDR
ObiettivoTd, γd
caratterizzazione lineare
G1,ξ1 (γd,Td)G2,ξ2 (γd,0.8Td) Gm,ξm

Incognite progettazione: caratteristiche meccaniche controventi Rigidezza (KRigidezza (KCC)) Resistenza Resistenza FFcc
DISPOSITIVI A DISSIPAZIONE “DIPENDENTE DALLO SPOSTAMENTO”
1. Definizione caratteristiche struttura in c.a.
Sistema bi-lineare
Spostamento Copertura
Tag
lio a
lla b
ase
pushover iniziale
pushover ridotta
Fy
k
d0
Sistema bi-lineare
Spostamento Copertura
Tag
lio a
lla b
ase
pushover iniziale
Sistema bi-lineare
Spostamento Copertura
Tag
lio a
lla b
ase
pushover iniziale
pushover ridotta
Fy
pushover ridottapushover ridotta
Fy
kkk
d0d0
2. Determinazione Caratteristiche del controvento equivalente
Procedura iterativa: si fissano:Procedura iterativa: si fissano:
•• forza sismica forza sismica FFee Fe = MTOT · Se(To)•• duttilitduttilitàà μμC C (val. ottimali 8(val. ottimali 8--14)14)
Nella prima iterazione Nella prima iterazione TToo ((struttstrutt. non . non controventatacontroventata))
Progetto dei Controventi : Trilineare
0
B
C D
A
δTOT δ0δy,c δy,s
Fe
Fs
Fc
Spostamento
Tag
lio a
lla b
ase
oscilloscill. elastico. elastico
oscilloscill. elasto. elasto––plastico plastico
controvento struttura
Progetto dei Controventi : Trilineare
0
B
C D
A
δTOT δ0δy,c δy,s
Fe
Fs
Fc
Spostamento
Tag
lio a
lla b
ase
oscilloscill. elastico. elastico
oscilloscill. elasto. elasto––plastico plastico
controvento struttura
Criterio uguale energia dellCriterio uguale energia dell’’oscillatore oscillatore elastico ed elastico ed elastoplastico elastoplastico
• Analisi statica nonAnalisi statica non--lineare (lineare (PushoverPushover))• Riduzione a Sistema biRiduzione a Sistema bi––lineare equiv.lineare equiv.
par. 4.5.4 e 4.5.4.2,3,4 O.P.C.M. n. 3274/03, all. 2
Progettazione controventi edifici

•• Impostata la duttilitImpostata la duttilitàà del controvento e definito lo spostamento max. della struttura del controvento e definito lo spostamento max. della struttura ll’’unica incognita resta la forza di scorrimento del controvento equnica incognita resta la forza di scorrimento del controvento equivalente uivalente FFcc
•• Si ricava il nuovo periodo della struttura Si ricava il nuovo periodo della struttura controventatacontroventata e quindi e quindi Fei = MTOT · Se(Ti)
2. Determinazione Caratteristiche del controvento equivalente
•• Procedura converge quando Procedura converge quando FFee ii/F/Feiei--11 < < εε
3. Ripartizione ai piani delle caratteristiche del controvento equivalente
costCK
S
KRK
= =
• Rapporto costante tra rigidezza controvento e rigidezza struttura ai piani Le rigidezze di piano si determinano a partire dall’analisi statica lineare
• Conservazione del rapporto di resistenza del piano iesimo rispetto al primo piano della struttura non rinforzata
,1 Np
s i jj ii
K Fs =
=Δ ∑ , ,c i K s iK R K= ⋅
, , ,C i F i C eqF R F= ⋅
( ),
2
1cos
c icontrov
controv
KK
n α= ⋅
1 1 1
c asta dissipK K K= +
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅== eoscillator,u
TOT
i
SS
i,uSi,y s
s1 δΔμμ
δδ.tcos
δKδK
FF
RyS,1S,1
iyS,iS,
yS,1
iyS,F =
⋅⋅
==
Progettazione controventi edifici

4. Verifica con metodo N2 e Valutazione fattore di struttura q
1. Curva pushover struttura rafforzata con controventi
2. Riduzione a Sistema bi-lineare equivalente (1-g.d.l.)
Spettri ADRS (N2)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0 0.05 0.1 0.15 0.2 0.25 0.3
SD (m)
Sa(g
)
ADRS elasticoADRS anelastico
Bilineare ADRSPunto prestazioneElastica
Verticale Bilin
3. Costruzione degli spettri anelastici a partire da quelli elastici funzione della sismicitàe tipo di terreno
( ) Tc T 1TT1μR
cμ <+−=
Tc T μ Rμ >=
Fattore di riduzione
αα
R q1
uμ0 ⋅= Sovra
resistenza
54 strutture analizzate (Scuole provincia Potenza), realizzate negli anni ‘70-’80
per un tot. di 432 analisi in corso di esecuzione
Variabili: - n. piani (da 3 a 5)- Strutture regolari e non- Geometria in pianta
Parametri: - duttilità controventi (8, 10, 12, 14)- zona sismica 1 e 2
Valutazione fattore di struttura q
Progettazione controventi edifici

DISPOSITIVI A DISSIPAZIONE DISPOSITIVI A DISSIPAZIONE ““DIPENDENTE DALLA VELOCITADIPENDENTE DALLA VELOCITA’’””::DISPOSITIVI VISCODISPOSITIVI VISCO--ELASTICI (VED)ELASTICI (VED)
1. Analisi della struttura da progettare/adeguare
Incognite progettazione:
Caratteristiche controventi
LossLoss factorfactor
SmorzamentoSmorzamento
Ampiezza deformazioneAmpiezza deformazione
ηd
ζd
γ
1) Periodo fondamentale; 2) Rigidezza elastica di piano; 3) Curva di capacità: Pushover
2. Calcolo rigidezza controventi
- Si utilizza il criterio della rigidezza proporzionale: Kcontrov. = α Kpiano strutt
3. Caratterizzazione del dispositivo dissipativo
Si fissano: - Temperatura ambiente (T), - Ampiezza di deformazione (γ)- Frequenza (f) del 1°modo strutt.
(A)
- Stabilire numero e posizione dei dissipatori
Si ricavano i parametri : - G’ (modulo di carico);- G” (modulo di perdita).
'G"G ηd =
Progettazione controventi edifici

Si valuta:- Rigidezza Equivalente- Smorzamento Equivalente
Controllo frequenza struttura controventata (f*)
f* ≠ fse
P.3A P. 5
4. Caratterizzazione del controvento dissipativo
DISPOSITIVO DISSIPATIVO (c; K’d)+
CONTROVENTO (Kb)
f* = f
5. Calcolo della curva di pushover della struttura controventata
- Conversione curva di pushover in formato ADRS Spettro di Capacità
- Riduzione della struttura controventata a sistema bi-lineare equivalente (1 g.d.l.)
Progettazione controventi edifici

6. Valutazione smorzamento struttura controventata (Spettri di Capacità) e Verifica (ricerca performance point)
I iterazione : formato ADRS
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
1,1
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,1 0,11 0,12
Sd (m)
Sa (g)
delast.
dplast.
ζ = 5%
ζ = 22%
Domanda
Capacità
Prestazione
ATC40
Calcolo dello smorzamentoCalcolo dello smorzamento
ξequ. = ξdisp + ξvisc + ξister
ξdisp = (C • Tel) / (4π • m)
ξvisc = 5%
ξister = (1 / 4π) • (ED / ES0)dy
Spostamento Spettrale
Acc
eler
azio
ne S
pettr
ale
dpi
Eso
ED
ay
api
Keffettivo
Kiniz.
Spettro di capacità
Ciclo dissipativo
VERIFICA
NO modifica rigidezza controventi Kc (P.2)
SI (P.7)
7. Verifica ampiezza di deformazione
γ* ≠ γ γ* = γ FINEModifica caratteristiche dispositivo (P.3A)
(contributo smorz. dispositivi VED)
(smorz. viscoso proprio struttura)
(smorz. isteretico struttura)
Progettazione controventi edifici

TASK 2TASK 2
Controllo passivo mediante Controllo passivo mediante Dissipazione di energiaDissipazione di energia
ATTIVITAATTIVITA’’ SPERIMENTALI (dispositivi)SPERIMENTALI (dispositivi)

Legame Forza -spost. trasversale (f = 0,1 Hz)
-300000
-200000
-100000
0
100000
200000
300000
-100 -50 0 50 100
spostamento trasversale (mm)
Forz
a (N
)
2000 KN (23MPa)4000 KN (45MPa)525 KN (6MPa)
Legame forza Spost. trasv. (N 4000 KN)
-300000-250000-200000-150000-100000-50000
050000
100000150000200000250000
-80 -60 -40 -20 0 20 40 60 80
spostamento trasversale (mm)
Forz
a di
Tag
lio (N
)
Isolatori gomma-piombo

ISOLATORI ACCIAIO-PTFE: DIAMETRO 600mm
Pressione Ampiezza Tipo di Frequenza Velocitàdi Contatto Spostamento Onda di Carico di Prova
0.00025 Hz 0.1 mm/s26.4 MPa 0.00125 Hz 0.5 mm/s
TRIANGOLARE 0.00625 Hz 2.5 mm/s19.8 MPa 100. mm 0.0125 Hz 5. mm/s
0.05 Hz 20. mm/s13.2 MPa 250. mm 0.125 Hz 50. mm/s
SINUSOIDALE 0.25 Hz 100. mm/s6.6 MPa 0.5 Hz 200. mm/s
1. Hz 400. mm/s
Isolatori Slitte Acciaio-PTFE

COEFFICIENTE D'ATTRITO DINAMICO - TEST TRIANGOLARE
0.0%
0.2%
0.4%
0.6%
0.8%
1.0%
1.2%
1.4%
0.mm/s 50.mm/s 100.mm/s 150.mm/s 200.mm/s 250.mm/s 300.mm/s 350.mm/s 400.mm/sVelocità di prova
m
Pc 6.6 MPaPc 13.2 MPaPc 19.8 MPaPc 26.4 MPa
Isolatori Slitte Acciaio-PTFE

MACCHINA DI PROVA PER I DISPOSITIVI WIRE-ROPEObiettivo 3:Obiettivo 3: SviluppoSviluppo di di modelli matematicimodelli matematici per per simulare il comportamentosimulare il comportamento nonnon--linearelineare di di isolatoriisolatori di di tipotipo wirewire--roperope, e di , e di una loro metodologiauna loro metodologia di di progettoprogetto per per strutture leggere strutture leggere
Telaio di carico in composto saldato, Telaio di carico in composto saldato, dimensionato per un carico massimo al dimensionato per un carico massimo al centro di 100 centro di 100 kN kN in condizioni dinamichein condizioni dinamiche
RPMTM: RPMTM: Resilient Pad Resilient Pad and and Mat Testing MachineMat Testing Machine
AttuatoreAttuatore idraulico a doppio effetto da 15 idraulico a doppio effetto da 15 kNkN, corsa , corsa ±± 70 mm e 70 mm e servovalvoleservovalvole MoogMoog
Centralina Centralina oleodinamicaoleodinamica da 50 da 50 ltlt//minmin, , pressione di lavoro 210 bar e capacitpressione di lavoro 210 bar e capacitààserbatoio 250 serbatoio 250 ltlt

MACCHINA DI PROVA PER I DISPOSITIVI WIRE-ROPEObiettivo 3:Obiettivo 3: SviluppoSviluppo di di modelli matematicimodelli matematici per per simulare il comportamentosimulare il comportamento nonnon--linearelineare di di isolatoriisolatori di di tipotipo wirewire--roperope, e di , e di una loro metodologiauna loro metodologia di di progettoprogetto per per strutture leggere strutture leggere
1) consentire la traslazione orizzontale della piastra di fissaggio esterno per la variazione di spessore degli isolatori
2) bloccaggio dell'isolatore alla piastradi fissaggio interno e di fissaggio esterno, prevedendo più fori per le varie misure degli isolatori (o un sistema di fissaggio che consenta la traslazione di detti fori)
3) inserimento di due piastre (superiore ed inferiore)
-attacco della piastra alla macchina
-attacco dell'isolatore alla piastra prevedendo fori della stessa tipologia della nota 2
TAGLIO 1 TAGLIO 2TRAZIONE-COMPRESSIONE
85.0
20.0 85.0
piastra di fissaggio esterno
fissaggio esterno
fissaggio interno
piastra di fissaggio interno

TASK 2TASK 2
Controllo passivo mediante Controllo passivo mediante Dissipazione di energiaDissipazione di energia
ATTIVITAATTIVITA’’ SPERIMENTALI COMUNISPERIMENTALI COMUNI
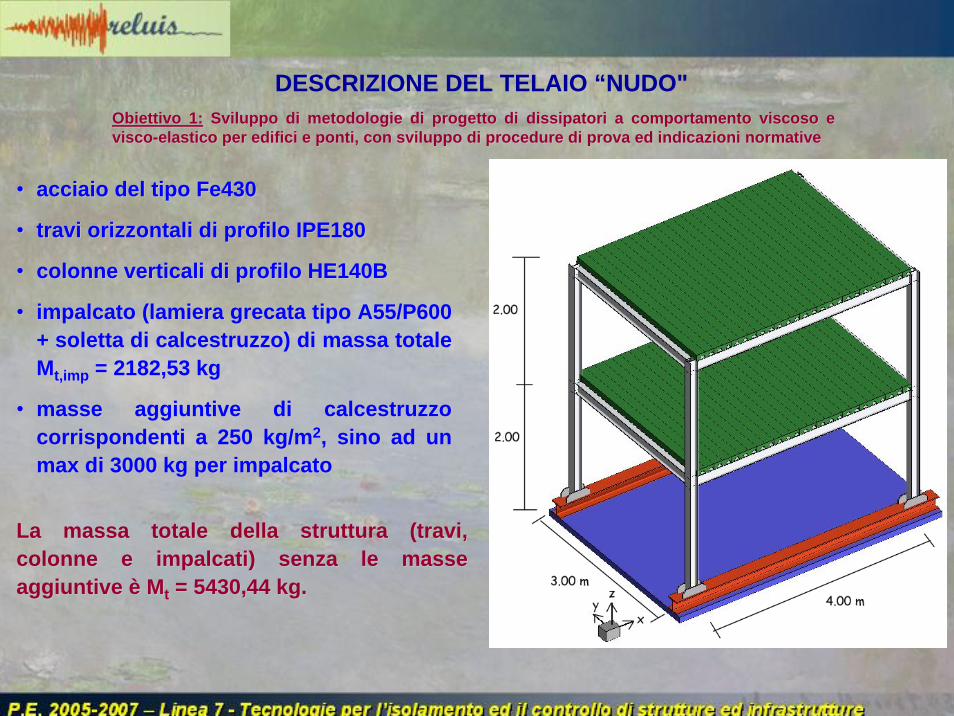
DESCRIZIONE DEL TELAIO “NUDO"Obiettivo 1:Obiettivo 1: SviluppoSviluppo didi metodologiemetodologie didi progettoprogetto didi dissipatoridissipatori a a comportamento viscosocomportamento viscoso e e viscovisco--elasticoelastico per per edificiedifici e e pontiponti, con , con svilupposviluppo di procedure didi procedure di prova prova ed ed indicazioniindicazioni normativenormative
•• acciaioacciaio del del tipotipo Fe430Fe430
•• travi orizzontalitravi orizzontali didi profilo profilo IPE180IPE180
•• colonne verticalicolonne verticali didi profilo profilo HE140BHE140B
•• impalcato impalcato ((lamiera grecata tipo lamiera grecata tipo A55/P600 A55/P600 + + solettasoletta didi calcestruzzocalcestruzzo) di) di massa totalemassa totaleMMt,impt,imp = 2182,53 kg= 2182,53 kg
•• masse masse aggiuntiveaggiuntive didi calcestruzzo calcestruzzo corrispondenti corrispondenti a 250 kg/ma 250 kg/m22, , sinosino ad un ad un max di 3000 kg per max di 3000 kg per impalcatoimpalcato
La La massa totale della struttura massa totale della struttura ((travitravi, , colonnecolonne e e impalcatiimpalcati) ) senzasenza le masse le masse aggiuntiveaggiuntive èè MMtt = 5430,44 kg.= 5430,44 kg.

MODELLAZIONE MATEMATICA DEL TELAIO “NUDO"
Le Le frequenzefrequenze modalimodali dovrannodovranno essereessere paragonateparagonate a a quellequelle sperimentalisperimentali misuratemisurate durantedurantele prove di le prove di caratterizzazionecaratterizzazione dinamicadinamica delladella strutturastruttura, al fine di , al fine di verificareverificare ilil modellomodello SAP.SAP.
Modo Frequenza Periodo Coeff. di partecipazione di massa (%)No. Num. SAP2000 [Hz] Num. SAP2000 [s] Longitudinale X Trasversale Y 1 3,83 0,2609 91 2 4,70 0,2127 87 3 6,31 0,1584 4 11,56 0,0865 9 5 16,67 0,0600 13 6 20,13 0,0497
1° Modo 2° Modo 3° Modo

SISTEMI DI ATTACCO
Al fine di Al fine di ottimizzareottimizzare la la realizzazione dellerealizzazione delle prove, prove, èè opportuno uniformareopportuno uniformare, per i , per i tretre tipi di tipi di dispositivo consideratidispositivo considerati, i , i sistemisistemi di di attaccoattacco del del dispositivodispositivo al al controventocontrovento e e alla strutturaalla struttura, , e e definire il sistemadefinire il sistema di di attaccoattacco del del controvento alla strutturacontrovento alla struttura..
Controvento a forma di KControvento a forma di K Controvento a semplice colonnaControvento a semplice colonna

SISTEMI DI ATTACCO
Tipologia di attacco proposta da UNIUD per controventi a forma dTipologia di attacco proposta da UNIUD per controventi a forma di Ki K
1 7 2 8 3 4 5
6
1. 1. piastrepiastre di di collegamento della cellacollegamento della cella di di carico alla travecarico alla trave di piano, 2. di piano, 2. collegamento collegamento cilindrico tracilindrico tra la la cellacella di di caricocarico e e il dissipatoreil dissipatore, 3. , 3. cerniera sfericacerniera sferica, 4. , 4. piastra controventopiastra controvento--nodonodo, 5. , 5. stratostrato di Teflon, 6. di Teflon, 6. campionecampione di di misuramisura, 7. , 7. cellacella di di caricocarico, 8. , 8. dispositivo Jarretdispositivo Jarret
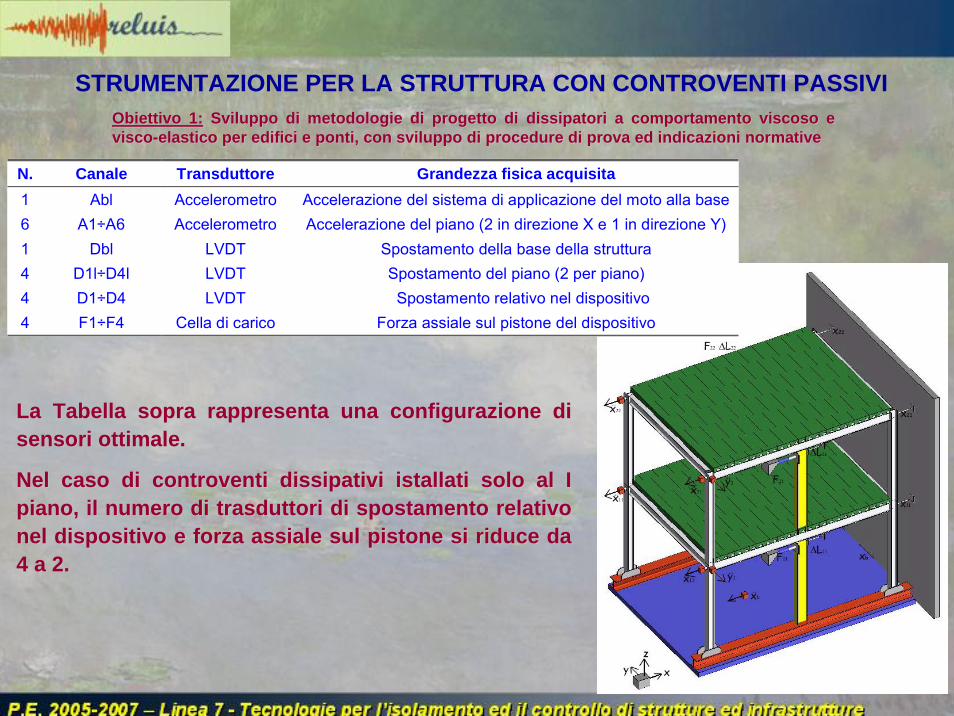
STRUMENTAZIONE PER LA STRUTTURA CON CONTROVENTI PASSIVIObiettivo 1:Obiettivo 1: SviluppoSviluppo didi metodologiemetodologie didi progettoprogetto didi dissipatoridissipatori a a comportamento viscosocomportamento viscoso e e viscovisco--elasticoelastico per per edificiedifici e e pontiponti, con , con svilupposviluppo di procedure didi procedure di prova prova ed ed indicazioniindicazioni normativenormative
La La TabellaTabella sopra rappresenta una configurazionesopra rappresenta una configurazione didisensori ottimalesensori ottimale. .
Nel casoNel caso didi controventi dissipativicontroventi dissipativi istallatiistallati solo al I solo al I piano, piano, il numeroil numero didi trasduttoritrasduttori didi spostamento relativo spostamento relativo nel dispositivonel dispositivo e e forza assiale sul pistone si riduce daforza assiale sul pistone si riduce da4 a 2.4 a 2.
N. Canale Transduttore Grandezza fisica acquisita 1 Abl Accelerometro Accelerazione del sistema di applicazione del moto alla base6 A1÷A6 Accelerometro Accelerazione del piano (2 in direzione X e 1 in direzione Y) 1 Dbl LVDT Spostamento della base della struttura 4 D1l÷D4l LVDT Spostamento del piano (2 per piano) 4 D1÷D4 LVDT Spostamento relativo nel dispositivo 4 F1÷F4 Cella di carico Forza assiale sul pistone del dispositivo

STRUMENTAZIONE PER LA STRUTTURA CON CONTROVENTI SEMI-ATTIVIObiettivo 1:Obiettivo 1: SviluppoSviluppo didi metodologiemetodologie didi progettoprogetto didi dissipatoridissipatori a a comportamento viscosocomportamento viscoso e e viscovisco--elasticoelastico per per edificiedifici e e pontiponti, con , con svilupposviluppo di procedure didi procedure di prova prova ed ed indicazioniindicazioni normativenormative
OltreOltre la la sensoristicasensoristica, , èè necessaria necessaria unun’’elettronica dedicataelettronica dedicata per per il il funzionamentofunzionamento semisemi--attivoattivo in in tempo tempo realereale del del dispositivodispositivo: :
•• 1 CPU real time National 1 CPU real time National Instruments Instruments
•• 2 2 schedeschede didi acquisizione acquisizione digitaledigitale (DAQ) (DAQ)
•• ilil software software LabviewLabview RealReal--Time Time
•• 4 4 grossi alimentatori grossi alimentatori per i per i dispositivi magnetoreologicidispositivi magnetoreologici

STRUTTURE PREFABBRICATE con sistemi dissipativi di protezione sismica:
SPERIMENTAZIONE SU UN PROTOTIPO AL VERO
U. O. di Bologna
OBIETTIVO:
Struttura a disposizione del progetto per verificare differenti tipologie di sistemi di smorzamento, anche in presenza di difetti di funzionamento
PROGETTO e REALIZZAZIONE DI UNA STRUTTURA PREFABBRICATA PROTOTIPO A DUE PIANI PER L’INSTALLAZIONE E PROVA DI SISTEMI DI SMORZAMENTO

STRUTTURE PREFABBRICATE con sistemi dissipativi di protezione sismica: SPERIMENTAZIONE SU UN PROTOTIPO AL VERO
U. O. di Bologna
600 500y
z
x
z
y
x
40
50
600
500
50
50
350
350
35
35
40
40
50
50
35
35
350
350
x
y
y
x
sezione Pilastro
sezione Trave
50
40
35
50 SISTEMA DI ECCITAZIONE:1) Vibrodina
2) Prove di rilascio
Possibilità di equipaggiare il prototipo anche con altri tipi di sistemi attivi di protezione
Frequenze naturali:1) 3,48 Hz2) 4,07 Hz3) 5,70 Hz

Prove sperimentali
HDRD
PERNO Ø30PERNO Ø30
BULLONE M16
Dissipatori HDRA= 391cm2
h = 1 cmMescola media
Telaio in c.a.M = 16tK = 4.2 kN/cm
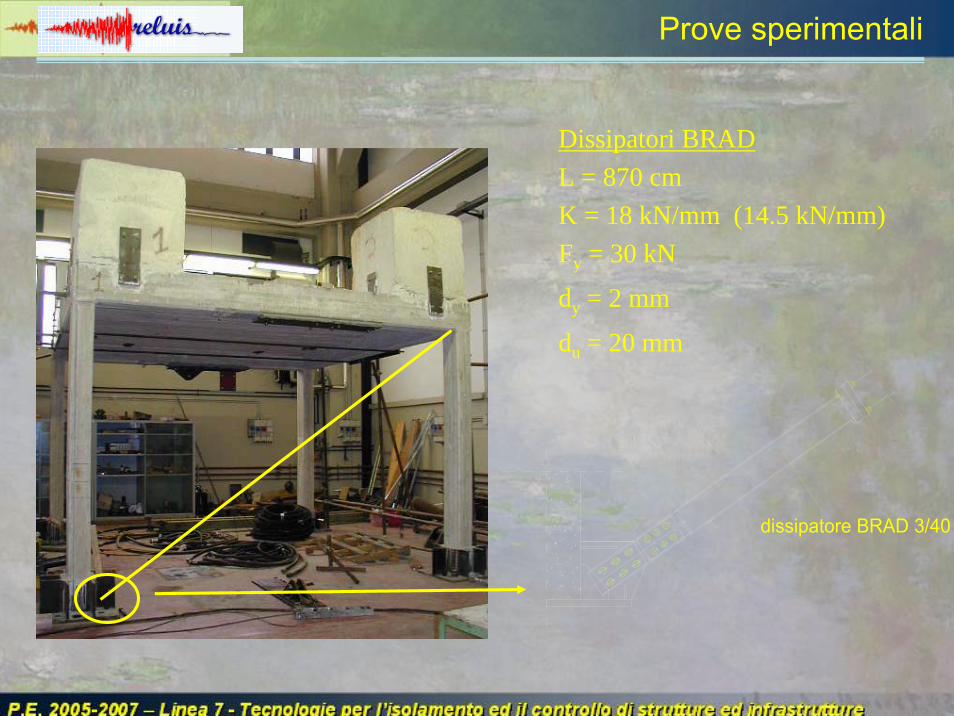
dissipatore BRAD 3/40
Dissipatori BRADL = 870 cmK = 18 kN/mm (14.5 kN/mm)Fy = 30 kN
dy = 2 mm
du = 20 mm
Prove sperimentali

TASK 3TASK 3
Controllo mediante Controllo mediante Masse accordateMasse accordate (passivo/semi(passivo/semi--attivo)attivo)



The benchmark structure
“Smart Base Isolated Benchmark Building Part I: Problem Definition” (Narasimhan et al. 2002)
The benchmark structure is a base-isolated eight-storey, steel-braced frame building, 82.4 meters long and 54.3 meters wide, similar to existing buildings in Los Angeles, California

TMD system design
,,,
mx A 83.281 = mx A 25.132 =Configuration A
my B 69.261 = my B 49.432 =Configuration B

Time-history seismic analysis(Far-fault seismic inputs)

Time-history seismic analysis(TOP acceleration)

Time-history seismic analysis(Near-fault seismic inputs)

Ongoing research issuesBI&TMD control system experimental tests on scaled model
SEISMIC ISOLATION SYSTEM

Ongoing research issues
BI&TMD control system experimental tests on scaled model
SEISMIC ISOLATION SYSTEM

Tipologie di TMD
Molla/smorzatore Appoggi in gomma Pendolo semplice Pendolo composto
Barra rigida A doppia massa
TMD Traslazionale (TTMD) TMD a pendolo (PTMD)
Pendolo “rocker” Pendolo “roller”Sisma
Vent
o

Proposta: TMD a massa incerta
Esempio: giardino pensile oscillante (ovvero: protezione strutturale + protezione ambientale)
Criticità: massa incerta e variabile Rischio di off-tuning(problema di robustezza)
Perché non convertire in TMD masse già disponibili in edifici esistenti (serbatoi, impianti, giardini pensili)?

Verso il RPTMD
Tuttavia, il PTMD del tipo “appeso” presenta svantaggi rispetto al TTMD ai fini dell’uso di masse incerte in copertura, quali:1. necessità di un telaio di sospensione2. impossibilità di doppio tuning3. vincolo di traiettoria circolare
ma soprattutto l’incompatibilità con strutture troppo rigide (L e Δx)
Rolling Pendulum TMD (RPTMD)
Analisi e sintesi robuste dimostrano che un MUTMD è efficace in situazioni di interesse pratico e in particolare che un MUTMD a pendolo (PTMD) è preferibile

Verso il RPTMD
RPTMD esistenti:
Isolatori antisismici per installazioni sensibili:superfici di rotolamento coniche con sfere dissipazione per attrito su fogli in gomma semplicità realizzativacomportamento non lineare
Proposta di RPTMD innovativo:superfici di rotolamento ellissoidiche con sferedissipazione alternativamente con smorzatori oleodinamici o fogli in gomma semplicità realizzativatuning in frequenza anche per grandi oscillazioni
superfici di rotolamento cilindriche a sezione circolare accoppiate su due livelli ortogonalismorzatori oleodinamici complessità realizzativacomportamento lineare per piccole oscillazioni

TASK 4TASK 4
Controllo semiControllo semi--attivoattivo

33 parametri:C(i), α(i), Fdy(i)
ALGORITMI DI CONTROLLO PER DISPOSITIVI MR: OcchiuzziOcchiuzzi et al. (2003)et al. (2003)
Fd (t)
x (t)
Fdy
Cd
( ) ( ) ( )Uii
FFFUUCF dydy
dyd sgnsgnmax
min,max,min, ⎥
⎦
⎤⎢⎣
⎡ −++= α
Confronto cicli F(x) sperimentali / numerici (n. 4 prove: 1-2.4Hz, 0-2.5A)
-8
-6
-4
-2
0
2
4
-25 -20 -15 -10 -5 0 5 10 15 20 25displacement [mm]
forc
e [k
N]
-8
-6
-4
-2
0
2
4
-25 -20 -15 -10 -5 0 5 10 15 20 25displacement [mm]
forc
e [k
N]
1 Hz1 Hz0 A0 A
1 Hz1 Hz2.5 A2.5 A
2.4 Hz2.4 Hz0 A0 A
2.4 Hz2.4 Hz2.5 A2.5 A
-36
-27
-18
-9
0
9
18
27
-25 -20 -15 -10 -5 0 5 10 15 20 25displacement [mm]
forc
e [k
N]
-36
-27
-18
-9
0
9
18
27
36
-25 -20 -15 -10 -5 0 5 10 15 20 25displacement [mm]
forc
e [k
N]
7 parametri se si include la dipendenza dalla corrente

ALGORITMI DI CONTROLLO PER DISPOSITIVI MR: Spencer et al. (1997)Spencer et al. (1997)
1010 parametri:α(i), c0(i), c1(i), k0, k1, γ, β, n, A, x0
1 Hz1 Hz0 A0 A
1 Hz1 Hz2.5 A2.5 A
2.4 Hz2.4 Hz0 A0 A
2.4 Hz2.4 Hz2.5 A2.5 A
-36
-27
-18
-9
0
9
18
27
36
-25 -20 -15 -10 -5 0 5 10 15 20 25displacement [mm]
forc
e [k
N]
-8
-6
-4
-2
0
2
4
-25 -20 -15 -10 -5 0 5 10 15 20 25
displacement [mm]
forc
e [k
N]
-36
-27
-18
-9
0
9
18
27
36
-25 -20 -15 -10 -5 0 5 10 15 20 25displacement [mm]
forc
e [k
N]
-8
-6
-4
-2
0
2
4
-25 -20 -15 -10 -5 0 5 10 15 20 25displacement [mm]
forc
e [k
N]
Confronto cicli F(x) sperimentali / numerici (n. 4 prove: 1-2.4Hz, 0-2.5A)
14 parametri se si include la dipendenza dalla corrente
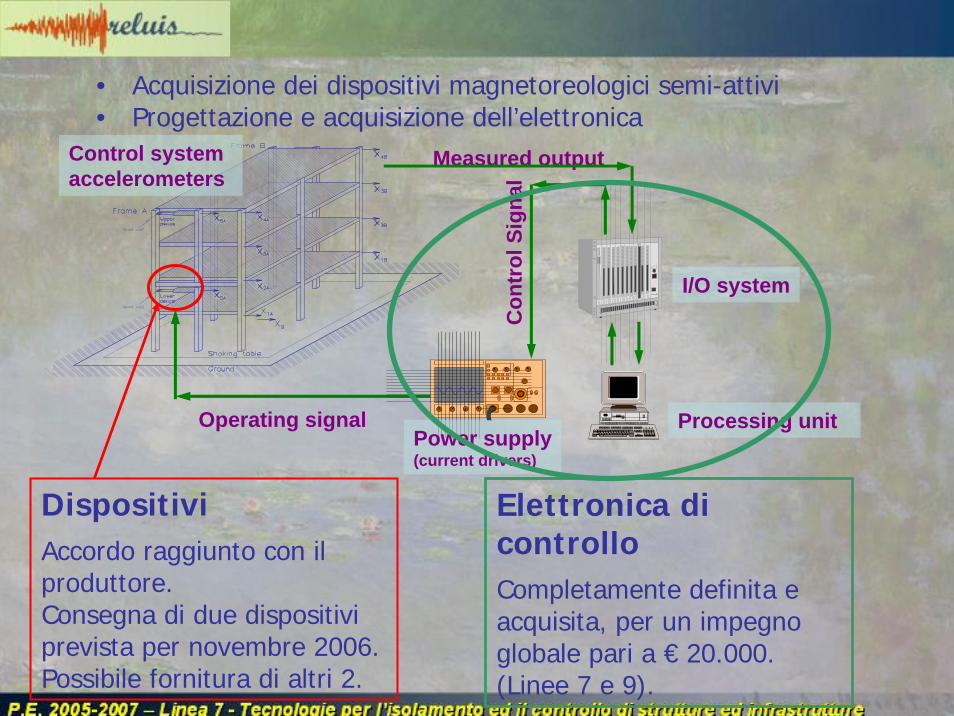
DispositiviAccordo raggiunto con il produttore.Consegna di due dispositivi prevista per novembre 2006.Possibile fornitura di altri 2.
I/O system
Processing unit
Measured output
Con
trol
Sig
nal
Power supply(current drivers)
Operating signal
Control system accelerometers
• Acquisizione dei dispositivi magnetoreologici semi-attivi• Progettazione e acquisizione dell’elettronica
Elettronica di controlloCompletamente definita e acquisita, per un impegno globale pari a € 20.000. (Linee 7 e 9).

• Definizione della configurazione di prova:• numero di dispositivi da installare• tipologia dei controventi
x1
c1,k1
m1
x2
m2
c2,k2x1m1
c1,k1
x2
m2
c2,k2IP
E 24
0
IPE
240
IPE
180
In ogni caso, presenza di tutte le masse aggiuntive possibili (eventualmente anche disposte eccentricamente)
Grazie per l’attenzione !























![Setti snelli in calcestruzzo armato: confronto Direct ...tesi.cab.unipd.it/47741/1/Tesi_Stefani_Mauro.pdf · turale quella più generale di modello (vedi ad esempio [Z1]) e, nello](https://img.dokumen.tips/doc/110x75/5c65ffe009d3f252168bb037/setti-snelli-in-calcestruzzo-armato-confronto-direct-tesicabunipdit477411tesistefanimauropdf.jpg)





